Data fusion for traffic flow estimation at intersections
|
|
|
- Griffin Chapman
- 5 years ago
- Views:
Transcription
1 Data fusion for traffic flow estimation at intersections Axel WOLFERMANN Masao KUWAHARA Babak MEHRAN German Aerospace Center (DLR e. V.) Tohoku University Germany Japan Canada



2 Outline Part I Motivation and idea Part II Data Fusion Concept Part III Application and Discussion 2

3 Part I Motivation and idea 3







4 Why data fusion? Good coverage of space mobile detectors floating car data mobile phone data Good coverage of time stationary detectors inductive loops video infra red evolving technologies automatic video detection blue tooth 4
5 The application Mobile and stationary detectors have been fused before. But not at intersection level. The story about the importance of signalised intersections in urban networks. Signal control is based on turning ratios ever since. But who knows the turning ratios? Soon we will 5
")


6 Data sources for the fusion Mobile detectors Floating Car Data (FCD) Stationary detectors e.g. inductive loops Historic data used to fill the gaps in time and space Network context vehicles do not disappear magically every simulator uses this information 6












7 Data output of the fusion Available data Floating Car Data (FCD) detector data historic data network layout Desired information OD on intersection level (traffic flow for all movements) resolution 1 h (better 15 min) q [q]=1 veh/time 15 min 7

8 Part II Data Fusion Concept 8



9 The concept in a nutshell combine as many data sources as are available and seem useful bridge the gap of unknown turning volumes at intersections by using Floating Car Data use historic data in case no current data is available weight the different data sources according to their reliability estimates true values estimates uncertainty of the predicted value computes a weighted average of predicted values and measured values minimises the error covariance (for white noise) 9




")

10 Kalman Filter Initialisation (start condition) Detector data FCD t = 1 Penetration rate Predict (process) t = t + 1 Update (a posteriori estimate) (measurements) FCD based traffic flow Historic traffic flow Network context 10

")
 FCD")
 traffic")


11 Illustration of Kalman Filter Prediction t = t + 1 First update (FCD) Second update (Historic data) FCD Estimate Historic Data (HD) traffic flow HD more reliable FCD more reliable Third update (Network context) t - 3 t - 2 t - 1 t t + 1 time 11
12 Network context q A, q B, q A,2 A q A,9 q A,8 q B,1 q B,2 B q B,3 q B,8 q A,7 A B q A,6 q B,4 12
13 Error terms Historic data FCD variance of historic data clustering! variance of penetration rate detector reliability? Network context reliability of estimates from adjacent intersections 13

14 Part III Application and Discussion 14
15 Application overview fictitious data true values are known for evaluation elasticity tests for different parameters traffic flow variation penetration rate detector reliability representativeness of probe vehicles simple two intersection network Monte Carlo simulation to avoid random results 15

16 Application FCD Estimates Historic Data Filter output 16

17 Application FCD Estimates Historic Data Filter output True values Confidence interval 17
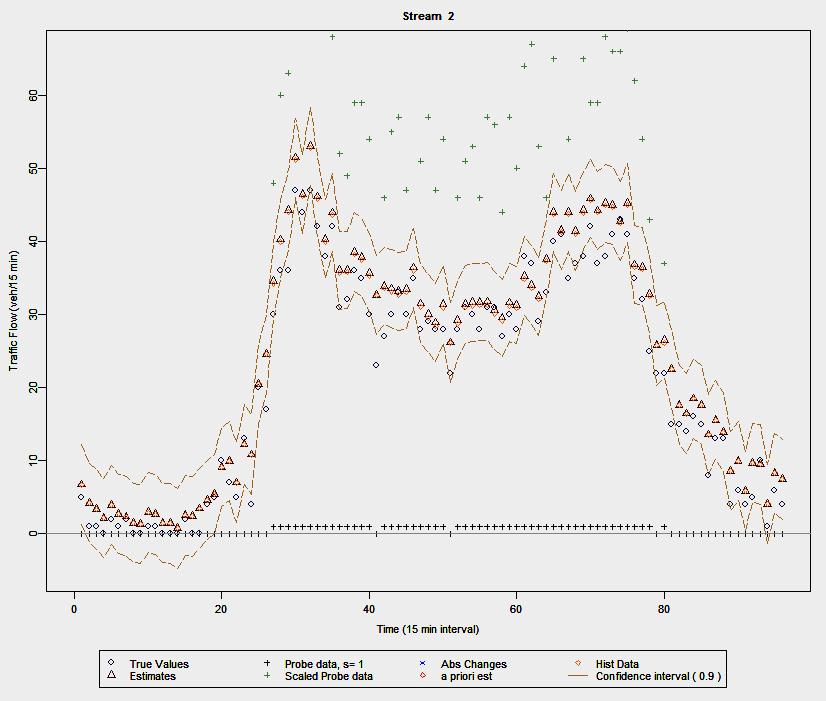

18 Application penetration rate bad estimates by FCD no FCD, historic data only 18

19 Application penetration rate flow variation confidence interval wrong judgment of measurement variation? 19
20 Traffic volume (veh/15min) Traffic volume (veh) Application Time (15min intervals) Update 1 Update 2 Final True Data Cumulative Error (Update1) Cumulative Error (Update2) Cumulative Error (Final) 20
 good clustering technique for historic data required combination with flow simulation desirable evaluation")
21 Discussion more data sources useful how to judge the measurement reliability? high penetration rate crucial (> 10 %) good clustering technique for historic data required combination with flow simulation desirable evaluation of real data dito a promising concept if sufficient FCD is available 21
Estimating Vehicle Trajectories on a Motorway by Data Fusion of Probe and Detector Data
 Estimating Vehicle Trajectories on a Motorway by Data Fusion of Probe and Detector Data International Workshop on Transport Networks under Hazardous Conditions March 1st, 2013 Masao Kuwahara, Takeshi Ohata,
Estimating Vehicle Trajectories on a Motorway by Data Fusion of Probe and Detector Data International Workshop on Transport Networks under Hazardous Conditions March 1st, 2013 Masao Kuwahara, Takeshi Ohata,
Robust Position and Velocity Estimation Methods in Integrated Navigation Systems for Inland Water Applications
 Robust Position and Velocity Estimation Methods in Integrated Navigation Systems for Inland Water Applications D. Arias-Medina, M. Romanovas, I. Herrera-Pinzón, R. Ziebold German Aerospace Centre (DLR)
Robust Position and Velocity Estimation Methods in Integrated Navigation Systems for Inland Water Applications D. Arias-Medina, M. Romanovas, I. Herrera-Pinzón, R. Ziebold German Aerospace Centre (DLR)
BIG DATA EUROPE TRANSPORT PILOT: INTRODUCING THESSALONIKI. Josep Maria Salanova Grau CERTH-HIT
 BIG DATA EUROPE TRANSPORT PILOT: INTRODUCING THESSALONIKI Josep Maria Salanova Grau CERTH-HIT Thessaloniki on the map ~ 1.400.000 inhabitants & ~ 1.300.000 daily trips ~450.000 private cars & ~ 20.000
BIG DATA EUROPE TRANSPORT PILOT: INTRODUCING THESSALONIKI Josep Maria Salanova Grau CERTH-HIT Thessaloniki on the map ~ 1.400.000 inhabitants & ~ 1.300.000 daily trips ~450.000 private cars & ~ 20.000
Field Operational Test of a new Delay-Based Traffic Signal Control Using C2I Communication Technology
 Field Operational Test of a new Delay-Based Traffic Signal Control Using C2I Communication Technology Robert Oertel Rutherfordstr. 2, 12489 Berlin, Germany Tobias Frankiewicz Lilienthalplatz 7, 38108 Braunschweig,
Field Operational Test of a new Delay-Based Traffic Signal Control Using C2I Communication Technology Robert Oertel Rutherfordstr. 2, 12489 Berlin, Germany Tobias Frankiewicz Lilienthalplatz 7, 38108 Braunschweig,
Big data in Thessaloniki
 Big data in Thessaloniki Josep Maria Salanova Grau Center for Research and Technology Hellas Hellenic Institute of Transport Email: jose@certh.gr - emit@certh.gr Web: www.hit.certh.gr Big data in Thessaloniki
Big data in Thessaloniki Josep Maria Salanova Grau Center for Research and Technology Hellas Hellenic Institute of Transport Email: jose@certh.gr - emit@certh.gr Web: www.hit.certh.gr Big data in Thessaloniki
On-site Traffic Accident Detection with Both Social Media and Traffic Data
 On-site Traffic Accident Detection with Both Social Media and Traffic Data Zhenhua Zhang Civil, Structural and Environmental Engineering University at Buffalo, The State University of New York, Buffalo,
On-site Traffic Accident Detection with Both Social Media and Traffic Data Zhenhua Zhang Civil, Structural and Environmental Engineering University at Buffalo, The State University of New York, Buffalo,
1. Travel time measurement using Bluetooth detectors 2. Travel times on arterials (characteristics & challenges) 3. Dealing with outliers 4.
 3. Dealing with outliers 4.") 1. Travel time measurement using Bluetooth detectors 2. Travel times on arterials (characteristics & challenges) 3. Dealing with outliers 4. Travel time prediction Travel time = 2 40 9:16:00 9:15:50 Travel
1. Travel time measurement using Bluetooth detectors 2. Travel times on arterials (characteristics & challenges) 3. Dealing with outliers 4. Travel time prediction Travel time = 2 40 9:16:00 9:15:50 Travel
Antenna Characterization for Bluetooth-based Travel Time Data Collection
 1 Antenna Characterization for Bluetooth-based Travel Time Data Collection Western States Rural Transportation Technology Implementers Forum June 16 th, 2011 J. David Porter, David S. Kim, Mario E. Magaña
1 Antenna Characterization for Bluetooth-based Travel Time Data Collection Western States Rural Transportation Technology Implementers Forum June 16 th, 2011 J. David Porter, David S. Kim, Mario E. Magaña
SOUND: A Traffic Simulation Model for Oversaturated Traffic Flow on Urban Expressways
 SOUND: A Traffic Simulation Model for Oversaturated Traffic Flow on Urban Expressways Toshio Yoshii 1) and Masao Kuwahara 2) 1: Research Assistant 2: Associate Professor Institute of Industrial Science,
SOUND: A Traffic Simulation Model for Oversaturated Traffic Flow on Urban Expressways Toshio Yoshii 1) and Masao Kuwahara 2) 1: Research Assistant 2: Associate Professor Institute of Industrial Science,
Innovative mobility data collection tools for sustainable planning
 Innovative mobility data collection tools for sustainable planning Dr. Maria Morfoulaki Center for Research and Technology Hellas (CERTH)/ Hellenic Institute of Transport (HIT) marmor@certh.gr Data requested
Innovative mobility data collection tools for sustainable planning Dr. Maria Morfoulaki Center for Research and Technology Hellas (CERTH)/ Hellenic Institute of Transport (HIT) marmor@certh.gr Data requested
Evaluation of Actuated Right Turn Signal Control Using the ITS Radio Communication System
 19th ITS World Congress, Vienna, Austria, 22/26 October 2012 AP-00201 Evaluation of Actuated Right Turn Signal Control Using the ITS Radio Communication System Osamu Hattori *, Masafumi Kobayashi Sumitomo
19th ITS World Congress, Vienna, Austria, 22/26 October 2012 AP-00201 Evaluation of Actuated Right Turn Signal Control Using the ITS Radio Communication System Osamu Hattori *, Masafumi Kobayashi Sumitomo
Traffic Management for Smart Cities TNK115 SMART CITIES
 Traffic Management for Smart Cities TNK115 SMART CITIES DAVID GUNDLEGÅRD DIVISION OF COMMUNICATION AND TRANSPORT SYSTEMS Outline Introduction Traffic sensors Traffic models Frameworks Information VS Control
Traffic Management for Smart Cities TNK115 SMART CITIES DAVID GUNDLEGÅRD DIVISION OF COMMUNICATION AND TRANSPORT SYSTEMS Outline Introduction Traffic sensors Traffic models Frameworks Information VS Control
A SYSTEM FOR VEHICLE DATA PROCESSING TO DETECT SPATIOTEMPORAL CONGESTED PATTERNS: THE SIMTD-APPROACH
 19th ITS World Congress, Vienna, Austria, 22/26 October 2012 EU-00062 A SYSTEM FOR VEHICLE DATA PROCESSING TO DETECT SPATIOTEMPORAL CONGESTED PATTERNS: THE SIMTD-APPROACH M. Koller, A. Elster#, H. Rehborn*,
19th ITS World Congress, Vienna, Austria, 22/26 October 2012 EU-00062 A SYSTEM FOR VEHICLE DATA PROCESSING TO DETECT SPATIOTEMPORAL CONGESTED PATTERNS: THE SIMTD-APPROACH M. Koller, A. Elster#, H. Rehborn*,
Intelligent Transport Systems and GNSS. ITSNT 2017 ENAC, Toulouse, France 11/ Nobuaki Kubo (TUMSAT)
") Intelligent Transport Systems and GNSS ITSNT 2017 ENAC, Toulouse, France 11/14-17 2017 Nobuaki Kubo (TUMSAT) Contents ITS applications in Japan How can GNSS contribute to ITS? Current performance of GNSS
Intelligent Transport Systems and GNSS ITSNT 2017 ENAC, Toulouse, France 11/14-17 2017 Nobuaki Kubo (TUMSAT) Contents ITS applications in Japan How can GNSS contribute to ITS? Current performance of GNSS
BLUETOOTH-BASED FLOATING CAR OBSERVER: MODEL EVALUATION USING SIMULATION AND FIELD MEASUREMENTS
 Dipl.-Ing. Gaby Gurczik German Aerospace Center (DLR) Institute of Transportation Systems Gaby.Gurczik@dlr.de BLUETOOTH-BASED FLOATING CAR OBSERVER: MODEL EVALUATION USING SIMULATION AND FIELD MEASUREMENTS
Dipl.-Ing. Gaby Gurczik German Aerospace Center (DLR) Institute of Transportation Systems Gaby.Gurczik@dlr.de BLUETOOTH-BASED FLOATING CAR OBSERVER: MODEL EVALUATION USING SIMULATION AND FIELD MEASUREMENTS
Real-time Traffic Monitoring by fusing Floating Car Data with Stationary Detector Data
 Real-time Traffic Monitoring by fusing Floating Car Data with Stationary Detector Data Maarten Houbraken, Pieter Audenaert, Didier Colle and Mario Pickavet Department of Information Technology Ghent University
Real-time Traffic Monitoring by fusing Floating Car Data with Stationary Detector Data Maarten Houbraken, Pieter Audenaert, Didier Colle and Mario Pickavet Department of Information Technology Ghent University
Traffic Solutions. How to Test FCD Monitoring Solutions: Performance of Cellular-Based Vs. GPS-based systems
 Traffic Solutions How to Test FCD Monitoring Solutions: Performance of Cellular-Based Vs. GPS-based systems About Cellint Israel Based, office in the US Main products NetEyes for quality of RF networks
Traffic Solutions How to Test FCD Monitoring Solutions: Performance of Cellular-Based Vs. GPS-based systems About Cellint Israel Based, office in the US Main products NetEyes for quality of RF networks
IMPROVEMENTS TO A QUEUE AND DELAY ESTIMATION ALGORITHM UTILIZED IN VIDEO IMAGING VEHICLE DETECTION SYSTEMS
 IMPROVEMENTS TO A QUEUE AND DELAY ESTIMATION ALGORITHM UTILIZED IN VIDEO IMAGING VEHICLE DETECTION SYSTEMS A Thesis Proposal By Marshall T. Cheek Submitted to the Office of Graduate Studies Texas A&M University
IMPROVEMENTS TO A QUEUE AND DELAY ESTIMATION ALGORITHM UTILIZED IN VIDEO IMAGING VEHICLE DETECTION SYSTEMS A Thesis Proposal By Marshall T. Cheek Submitted to the Office of Graduate Studies Texas A&M University
PROBE DATA FROM CONSUMER GPS NAVIGATION DEVICES FOR THE ANALYSIS OF CONTROLLED INTERSECTIONS
 PROBE DATA FROM CONSUMER GPS NAVIGATION DEVICES FOR THE ANALYSIS OF CONTROLLED INTERSECTIONS Arnold Meijer (corresponding author) Business Development Specialist, TomTom International P.O Box 16597, 1001
PROBE DATA FROM CONSUMER GPS NAVIGATION DEVICES FOR THE ANALYSIS OF CONTROLLED INTERSECTIONS Arnold Meijer (corresponding author) Business Development Specialist, TomTom International P.O Box 16597, 1001
DLR Simulation Environment m 3
 DLR Simulation Environment m 3 Matthias Röckl, Thomas Strang Slide 1 > First C2C-CC/COMeSafety Simulation Workshop > Matthias Röckl Motivation Contradicting simulation results Source: Cavin et.al.: On
DLR Simulation Environment m 3 Matthias Röckl, Thomas Strang Slide 1 > First C2C-CC/COMeSafety Simulation Workshop > Matthias Röckl Motivation Contradicting simulation results Source: Cavin et.al.: On
Speed Enforcement Systems Based on Vision and Radar Fusion: An Implementation and Evaluation 1
 Speed Enforcement Systems Based on Vision and Radar Fusion: An Implementation and Evaluation 1 Seungki Ryu *, 2 Youngtae Jo, 3 Yeohwan Yoon, 4 Sangman Lee, 5 Gwanho Choi 1 Research Fellow, Korea Institute
Speed Enforcement Systems Based on Vision and Radar Fusion: An Implementation and Evaluation 1 Seungki Ryu *, 2 Youngtae Jo, 3 Yeohwan Yoon, 4 Sangman Lee, 5 Gwanho Choi 1 Research Fellow, Korea Institute
Comparison of Simulation-Based Dynamic Traffic Assignment Approaches for Planning and Operations Management
 Comparison of Simulation-Based Dynamic Traffic Assignment Approaches for Planning and Operations Management Ramachandran Balakrishna Daniel Morgan Qi Yang Howard Slavin Caliper Corporation 4 th TRB Conference
Comparison of Simulation-Based Dynamic Traffic Assignment Approaches for Planning and Operations Management Ramachandran Balakrishna Daniel Morgan Qi Yang Howard Slavin Caliper Corporation 4 th TRB Conference
Traffic Signal Timing Coordination. Innovation for better mobility
 Traffic Signal Timing Coordination Pre-Timed Signals All phases have a MAX recall placed on them. How do they work All phases do not have detection so they are not allowed to GAP out All cycles are a consistent
Traffic Signal Timing Coordination Pre-Timed Signals All phases have a MAX recall placed on them. How do they work All phases do not have detection so they are not allowed to GAP out All cycles are a consistent
Data collection and modeling for APTS and ATIS under Indian conditions - Challenges and Solutions
 Data collection and modeling for APTS and ATIS under Indian conditions - Challenges and Solutions Lelitha Vanajakshi Dept. of Civil Engg. IIT Madras, India lelitha@iitm.ac.in Outline Introduction Automated
Data collection and modeling for APTS and ATIS under Indian conditions - Challenges and Solutions Lelitha Vanajakshi Dept. of Civil Engg. IIT Madras, India lelitha@iitm.ac.in Outline Introduction Automated
Characteristics of Routes in a Road Traffic Assignment
 Characteristics of Routes in a Road Traffic Assignment by David Boyce Northwestern University, Evanston, IL Hillel Bar-Gera Ben-Gurion University of the Negev, Israel at the PTV Vision Users Group Meeting
Characteristics of Routes in a Road Traffic Assignment by David Boyce Northwestern University, Evanston, IL Hillel Bar-Gera Ben-Gurion University of the Negev, Israel at the PTV Vision Users Group Meeting
Use of Probe Vehicles to Increase Traffic Estimation Accuracy in Brisbane
 Use of Probe Vehicles to Increase Traffic Estimation Accuracy in Brisbane Lee, J. & Rakotonirainy, A. Centre for Accident Research and Road Safety - Queensland (CARRS-Q), Queensland University of Technology
Use of Probe Vehicles to Increase Traffic Estimation Accuracy in Brisbane Lee, J. & Rakotonirainy, A. Centre for Accident Research and Road Safety - Queensland (CARRS-Q), Queensland University of Technology
Deployment and Testing of Optimized Autonomous and Connected Vehicle Trajectories at a Closed- Course Signalized Intersection
 Deployment and Testing of Optimized Autonomous and Connected Vehicle Trajectories at a Closed- Course Signalized Intersection Clark Letter*, Lily Elefteriadou, Mahmoud Pourmehrab, Aschkan Omidvar Civil
Deployment and Testing of Optimized Autonomous and Connected Vehicle Trajectories at a Closed- Course Signalized Intersection Clark Letter*, Lily Elefteriadou, Mahmoud Pourmehrab, Aschkan Omidvar Civil
What's the Deal With All These Tracking Strategies?
 What's the Deal With All These Tracking Strategies? Omar Moreno Santa Cruz Institute for Particle Physics University of California, Santa Cruz omoreno1@ucsc.edu October 26-28, 2015 Some Preliminaries All
What's the Deal With All These Tracking Strategies? Omar Moreno Santa Cruz Institute for Particle Physics University of California, Santa Cruz omoreno1@ucsc.edu October 26-28, 2015 Some Preliminaries All
State-Space Models with Kalman Filtering for Freeway Traffic Forecasting
 State-Space Models with Kalman Filtering for Freeway Traffic Forecasting Brian Portugais Boise State University brianportugais@u.boisestate.edu Mandar Khanal Boise State University mkhanal@boisestate.edu
State-Space Models with Kalman Filtering for Freeway Traffic Forecasting Brian Portugais Boise State University brianportugais@u.boisestate.edu Mandar Khanal Boise State University mkhanal@boisestate.edu
Guido Cantelmo Prof. Francesco Viti. Practical methods for Dynamic Demand Estimation in congested Networks
 Guido Cantelmo Prof. Francesco Viti MobiLab Transport Research Group Faculty of Sciences, Technology and Communication, Practical methods for Dynamic Demand Estimation in congested Networks University
Guido Cantelmo Prof. Francesco Viti MobiLab Transport Research Group Faculty of Sciences, Technology and Communication, Practical methods for Dynamic Demand Estimation in congested Networks University
Performance Analysis of GPS Integer Ambiguity Resolution Using External Aiding Information
 Journal of Global Positioning Systems (2005) Vol. 4, No. 1-2: 201-206 Performance Analysis of GPS Integer Ambiguity Resolution Using External Aiding Information Sebum Chun, Chulbum Kwon, Eunsung Lee, Young
Journal of Global Positioning Systems (2005) Vol. 4, No. 1-2: 201-206 Performance Analysis of GPS Integer Ambiguity Resolution Using External Aiding Information Sebum Chun, Chulbum Kwon, Eunsung Lee, Young
Cooperative Information Augmentation in a Geosensor Network
 Cooperative Information Augmentation in a Geosensor Network Malte Jan chulze, Claus Brenner & Monika ester Institute of Cartography and Geoinformatics Leibniz University Hannover Outline Introduction Properties
Cooperative Information Augmentation in a Geosensor Network Malte Jan chulze, Claus Brenner & Monika ester Institute of Cartography and Geoinformatics Leibniz University Hannover Outline Introduction Properties
Aimsun Next User's Manual
 Aimsun Next User's Manual 1. A quick guide to the new features available in Aimsun Next 8.3 1. Introduction 2. Aimsun Next 8.3 Highlights 3. Outputs 4. Traffic management 5. Microscopic simulator 6. Mesoscopic
Aimsun Next User's Manual 1. A quick guide to the new features available in Aimsun Next 8.3 1. Introduction 2. Aimsun Next 8.3 Highlights 3. Outputs 4. Traffic management 5. Microscopic simulator 6. Mesoscopic
Cooperative navigation (part II)
") Cooperative navigation (part II) An example using foot-mounted INS and UWB-transceivers Jouni Rantakokko Aim Increased accuracy during long-term operations in GNSS-challenged environments for - First responders
Cooperative navigation (part II) An example using foot-mounted INS and UWB-transceivers Jouni Rantakokko Aim Increased accuracy during long-term operations in GNSS-challenged environments for - First responders
Real Time Jitter Analysis
 Real Time Jitter Analysis Agenda ı Background on jitter measurements Definition Measurement types: parametric, graphical ı Jitter noise floor ı Statistical analysis of jitter Jitter structure Jitter PDF
Real Time Jitter Analysis Agenda ı Background on jitter measurements Definition Measurement types: parametric, graphical ı Jitter noise floor ı Statistical analysis of jitter Jitter structure Jitter PDF
Honda R&D Americas, Inc.
 Honda R&D Americas, Inc. Topics Honda s view on ITS and V2X Activity Honda-lead V2I Message Set Development Status Challenges Topics Honda s view on ITS and V2X Activity Honda-lead V2I Message Set Standard
Honda R&D Americas, Inc. Topics Honda s view on ITS and V2X Activity Honda-lead V2I Message Set Development Status Challenges Topics Honda s view on ITS and V2X Activity Honda-lead V2I Message Set Standard
Analyzing Data Properties using Statistical Sampling Techniques
 Analyzing Data Properties using Statistical Sampling Techniques Illustrated on Scientific File Formats and Compression Features Julian M. Kunkel kunkel@dkrz.de 2016-06-21 Outline 1 Introduction 2 Exploring
Analyzing Data Properties using Statistical Sampling Techniques Illustrated on Scientific File Formats and Compression Features Julian M. Kunkel kunkel@dkrz.de 2016-06-21 Outline 1 Introduction 2 Exploring
Currently 2 vacant engineer positions (1 Engineer level, 1 Managing Engineer level)
") INDOT Agency Factoids (System/Comm.) Number of signalized intersections- 2570 200 connected by fiber 300 connected by radio 0 connected by twisted pair 225 connected by cellular 1500 not connected to communication
INDOT Agency Factoids (System/Comm.) Number of signalized intersections- 2570 200 connected by fiber 300 connected by radio 0 connected by twisted pair 225 connected by cellular 1500 not connected to communication
An Operational Test of Adaptive Signal Control. Campbell Road Corridor Richardson, Texas
 An Operational Test of Adaptive Signal Control Campbell Road Corridor Richardson, Texas September 2011 Robert Saylor and John Black, City of Richardson Operational Test Objectives Install Rhythm adaptive
An Operational Test of Adaptive Signal Control Campbell Road Corridor Richardson, Texas September 2011 Robert Saylor and John Black, City of Richardson Operational Test Objectives Install Rhythm adaptive
Automatic Maneuver Recognition in the Automobile: the Fusion of Uncertain Sensor Values using Bayesian Models
 Automatic Maneuver Recognition in the Automobile: the Fusion of Uncertain Sensor Values using Bayesian Models Arati Gerdes Institute of Transportation Systems German Aerospace Center, Lilienthalplatz 7,
Automatic Maneuver Recognition in the Automobile: the Fusion of Uncertain Sensor Values using Bayesian Models Arati Gerdes Institute of Transportation Systems German Aerospace Center, Lilienthalplatz 7,
DEVELOPMENT OF A MICROSCOPIC TRAFFIC SIMULATION MODEL FOR INTERACTIVE TRAFFIC ENVIRONMENT
 DEVELOPMENT OF A MICROSCOPIC TRAFFIC SIMULATION MODEL FOR INTERACTIVE TRAFFIC ENVIRONMENT Tomoyoshi SHIRAISHI, Hisatomo HANABUSA, Masao KUWAHARA, Edward CHUNG, Shinji TANAKA, Hideki UENO, Yoshikazu OHBA,
DEVELOPMENT OF A MICROSCOPIC TRAFFIC SIMULATION MODEL FOR INTERACTIVE TRAFFIC ENVIRONMENT Tomoyoshi SHIRAISHI, Hisatomo HANABUSA, Masao KUWAHARA, Edward CHUNG, Shinji TANAKA, Hideki UENO, Yoshikazu OHBA,
Mapping the capacity and performance of the arterial road network in Adelaide
 Australasian Transport Research Forum 2015 Proceedings 30 September - 2 October 2015, Sydney, Australia Publication website: http://www.atrf.info/papers/index.aspx Mapping the capacity and performance
Australasian Transport Research Forum 2015 Proceedings 30 September - 2 October 2015, Sydney, Australia Publication website: http://www.atrf.info/papers/index.aspx Mapping the capacity and performance
Adaptive Correction Method for an OCXO and Investigation of Analytical Cumulative Time Error Upperbound
 Adaptive Correction Method for an OCXO and Investigation of Analytical Cumulative Time Error Upperbound Hui Zhou, Thomas Kunz, Howard Schwartz Abstract Traditional oscillators used in timing modules of
Adaptive Correction Method for an OCXO and Investigation of Analytical Cumulative Time Error Upperbound Hui Zhou, Thomas Kunz, Howard Schwartz Abstract Traditional oscillators used in timing modules of
INTRODUCTION TO KALMAN FILTERS
 ECE5550: Applied Kalman Filtering 1 1 INTRODUCTION TO KALMAN FILTERS 1.1: What does a Kalman filter do? AKalmanfilterisatool analgorithmusuallyimplementedasa computer program that uses sensor measurements
ECE5550: Applied Kalman Filtering 1 1 INTRODUCTION TO KALMAN FILTERS 1.1: What does a Kalman filter do? AKalmanfilterisatool analgorithmusuallyimplementedasa computer program that uses sensor measurements
IV Work Area: CONNECTED CARS: ROAD TO VEHICLE COMMUNICATION THROUGH VISIBLE LIGHT. An illustration of traffic control system of tomorrow
 IV Work Area: CONNECTED CARS: ROAD TO VEHICLE COMMUNICATION THROUGH VISIBLE LIGHT An illustration of traffic control system of tomorrow Motivation and Objectives IV, VV, VI optoelectronic WDM cooperative
IV Work Area: CONNECTED CARS: ROAD TO VEHICLE COMMUNICATION THROUGH VISIBLE LIGHT An illustration of traffic control system of tomorrow Motivation and Objectives IV, VV, VI optoelectronic WDM cooperative
City of Surrey Adaptive Signal Control Pilot Project
 City of Surrey Adaptive Signal Control Pilot Project ITS Canada Annual Conference and General Meeting May 29 th, 2013 1 2 ASCT Pilot Project Background ASCT Pilot Project Background 25 Major Traffic Corridors
City of Surrey Adaptive Signal Control Pilot Project ITS Canada Annual Conference and General Meeting May 29 th, 2013 1 2 ASCT Pilot Project Background ASCT Pilot Project Background 25 Major Traffic Corridors
Cooperative Self-Organizing System for low Carbon Mobility at low Penetration Rates
 Small or medium-scale focused research project (STREP) ICT Call 8 FP7-ICT-2011-8 Cooperative Self-Organizing System for low Carbon Mobility at low Penetration Rates COLOMBO: Deliverable D5.4 Performance
Small or medium-scale focused research project (STREP) ICT Call 8 FP7-ICT-2011-8 Cooperative Self-Organizing System for low Carbon Mobility at low Penetration Rates COLOMBO: Deliverable D5.4 Performance
Agenda. TS2 Cabinet Components and Operation. Understanding a Signal Plan Maccarone. Basic Preemption/Priority
 Morning Traffic Terminology TS2 Cabinet Components and Operation Traffic Signal Phasing Ring Structure Traffic Signal Timing Understanding a Signal Plan Maccarone Controller Programming Afternoon Basic
Morning Traffic Terminology TS2 Cabinet Components and Operation Traffic Signal Phasing Ring Structure Traffic Signal Timing Understanding a Signal Plan Maccarone Controller Programming Afternoon Basic
Empirical Macroscopic Fundamental Diagrams: New Insights from Loop Detector and Floating Car Data
 Ambühl, Loder, Menendez and Axhausen Empirical Macroscopic Fundamental Diagrams: New Insights from Loop Detector and Floating Car Data. August 0 Word Count: 0 words + Figures + Tables = words Corresponding
Ambühl, Loder, Menendez and Axhausen Empirical Macroscopic Fundamental Diagrams: New Insights from Loop Detector and Floating Car Data. August 0 Word Count: 0 words + Figures + Tables = words Corresponding
Newsletter No. 2 (July 2017)
") Enhancing intelligent urban road transport network and cooperative systems for highly automated vehicles Newsletter No. 2 (July 2017) Introduction MAVEN (Managing Automated Vehicles Enhances Network) was
Enhancing intelligent urban road transport network and cooperative systems for highly automated vehicles Newsletter No. 2 (July 2017) Introduction MAVEN (Managing Automated Vehicles Enhances Network) was
Advanced Traffic Signal Control System Installed in Phuket City, Kingdom of Thailand
 INFORMATION & COMMUNICATION SYSTEMS Advanced Traffic Signal Control System Installed in Phuket City, Kingdom of Thailand Hajime SAKAKIBARA, Masanori AOKI and Hiroshi MATSUMOTO Along with the economic development,
INFORMATION & COMMUNICATION SYSTEMS Advanced Traffic Signal Control System Installed in Phuket City, Kingdom of Thailand Hajime SAKAKIBARA, Masanori AOKI and Hiroshi MATSUMOTO Along with the economic development,
Preparing Simulative Evaluation of the GLOSA Application. ITS World Congress, Vienna, 26 of October 2012
 Preparing Simulative Evaluation of the GLOSA Application ITS World Congress, Vienna, 26 of October 2012 D. Krajzewicz, L. Bieker, J. Erdmann; German Aerospace Center Introduction DRIVE C2X Aim: to lay
Preparing Simulative Evaluation of the GLOSA Application ITS World Congress, Vienna, 26 of October 2012 D. Krajzewicz, L. Bieker, J. Erdmann; German Aerospace Center Introduction DRIVE C2X Aim: to lay
TRIAL-BASED HEURISTIC TREE SEARCH FOR FINITE HORIZON MDPS. Thomas Keller and Malte Helmert Presented by: Ryan Berryhill
 TRIAL-BASED HEURISTIC TREE SEARCH FOR FINITE HORIZON MDPS Thomas Keller and Malte Helmert Presented by: Ryan Berryhill Outline Motivation Background THTS framework THTS algorithms Results Motivation Advances
TRIAL-BASED HEURISTIC TREE SEARCH FOR FINITE HORIZON MDPS Thomas Keller and Malte Helmert Presented by: Ryan Berryhill Outline Motivation Background THTS framework THTS algorithms Results Motivation Advances
Intelligent Driving Agents
 Intelligent Driving Agents The agent approach to tactical driving in autonomous vehicles and traffic simulation Presentation Master s thesis Patrick Ehlert January 29 th, 2001 Imagine. Sensors Actuators
Intelligent Driving Agents The agent approach to tactical driving in autonomous vehicles and traffic simulation Presentation Master s thesis Patrick Ehlert January 29 th, 2001 Imagine. Sensors Actuators
A model for new data - Using air borne traffic flow measurement for traffic forecast Reinhart Kühne (1 ; Martin Ruhé (1 ; Eileen Hipp (2
 A model for new data - Using air borne traffic flow measurement for traffic forecast Reinhart Kühne (1 ; Martin Ruhé (1 ; Eileen Hipp (2 1) German Aerospace Center (DLR), Transportation Studies; Rutherfordstr.
A model for new data - Using air borne traffic flow measurement for traffic forecast Reinhart Kühne (1 ; Martin Ruhé (1 ; Eileen Hipp (2 1) German Aerospace Center (DLR), Transportation Studies; Rutherfordstr.
DYNAMIC ODME FOR AUTOMATED VEHICLES MODELING USING BIG DATA
 DYNAMIC ODME FOR AUTOMATED VEHICLES MODELING USING BIG DATA Dr. Jaume Barceló, Professor Emeritus, UPC- Barcelona Tech, Strategic Advisor to PTV Group Shaleen Srivastava, Vice-President/Regional Director
DYNAMIC ODME FOR AUTOMATED VEHICLES MODELING USING BIG DATA Dr. Jaume Barceló, Professor Emeritus, UPC- Barcelona Tech, Strategic Advisor to PTV Group Shaleen Srivastava, Vice-President/Regional Director
Advanced Techniques for Mobile Robotics Location-Based Activity Recognition
 Advanced Techniques for Mobile Robotics Location-Based Activity Recognition Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz Activity Recognition Based on L. Liao, D. J. Patterson, D. Fox,
Advanced Techniques for Mobile Robotics Location-Based Activity Recognition Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz Activity Recognition Based on L. Liao, D. J. Patterson, D. Fox,
Lean Smart Parking. How to Collect High-Quality Data Cost-Effectively
 Lean Smart Parking How to Collect High-Quality Data Cost-Effectively Lean Smart Parking How to Collect High-Quality Data Cost-Effectively On-street sensors are now installed in cities from Los Angeles
Lean Smart Parking How to Collect High-Quality Data Cost-Effectively Lean Smart Parking How to Collect High-Quality Data Cost-Effectively On-street sensors are now installed in cities from Los Angeles
ASDA/FOTO based on Kerner s Three-Phase Traffic Theory in North Rhine-Westphalia and its Integration into Vehicles
 ASDA/FOTO based on Kerner s Three-Phase Traffic Theory in North Rhine-Westphalia and its Integration into Vehicles H. Rehborn* and J. Palmer# *Daimler AG and # IT-Designers Abstract Traffic data measured
ASDA/FOTO based on Kerner s Three-Phase Traffic Theory in North Rhine-Westphalia and its Integration into Vehicles H. Rehborn* and J. Palmer# *Daimler AG and # IT-Designers Abstract Traffic data measured
Localisation et navigation de robots
 Localisation et navigation de robots UPJV, Département EEA M2 EEAII, parcours ViRob Année Universitaire 2017/2018 Fabio MORBIDI Laboratoire MIS Équipe Perception ique E-mail: fabio.morbidi@u-picardie.fr
Localisation et navigation de robots UPJV, Département EEA M2 EEAII, parcours ViRob Année Universitaire 2017/2018 Fabio MORBIDI Laboratoire MIS Équipe Perception ique E-mail: fabio.morbidi@u-picardie.fr
Resilient and Accurate Autonomous Vehicle Navigation via Signals of Opportunity
 Resilient and Accurate Autonomous Vehicle Navigation via Signals of Opportunity Zak M. Kassas Autonomous Systems Perception, Intelligence, and Navigation (ASPIN) Laboratory University of California, Riverside
Resilient and Accurate Autonomous Vehicle Navigation via Signals of Opportunity Zak M. Kassas Autonomous Systems Perception, Intelligence, and Navigation (ASPIN) Laboratory University of California, Riverside
DESIGN OF VEHICLE ACTUATED SIGNAL FOR A MAJOR CORRIDOR IN CHENNAI USING SIMULATION
 DESIGN OF VEHICLE ACTUATED SIGNAL FOR A MAJOR CORRIDOR IN CHENNAI USING SIMULATION Presented by, R.NITHYANANTHAN S. KALAANIDHI Authors S.NITHYA R.NITHYANANTHAN D.SENTHURKUMAR K.GUNASEKARAN Introduction
DESIGN OF VEHICLE ACTUATED SIGNAL FOR A MAJOR CORRIDOR IN CHENNAI USING SIMULATION Presented by, R.NITHYANANTHAN S. KALAANIDHI Authors S.NITHYA R.NITHYANANTHAN D.SENTHURKUMAR K.GUNASEKARAN Introduction
Measurement over a Short Distance. Tom Mathew
 Measurement over a Short Distance Tom Mathew Outline Introduction Data Collection Methods Data Analysis Conclusion Introduction Determine Fundamental Traffic Parameter Data Collection and Interpretation
Measurement over a Short Distance Tom Mathew Outline Introduction Data Collection Methods Data Analysis Conclusion Introduction Determine Fundamental Traffic Parameter Data Collection and Interpretation
MIXED REALITY TRAFFIC EXPERIMENT SPACE UNDER INTERACTIVE TRAFFIC ENVIRONMENT FOR ITS RESEARCH
 MIXED REALITY TRAFFIC EXPERIMENT SPACE UNDER INTERACTIVE TRAFFIC ENVIRONMENT FOR ITS RESEARCH Katsushi Ikeuchi, Masao Kuwahara, Yoshihiro Suda, Yoshihisa Tanaka, Edward Chung, Takahiro Suzuki, Masataka
MIXED REALITY TRAFFIC EXPERIMENT SPACE UNDER INTERACTIVE TRAFFIC ENVIRONMENT FOR ITS RESEARCH Katsushi Ikeuchi, Masao Kuwahara, Yoshihiro Suda, Yoshihisa Tanaka, Edward Chung, Takahiro Suzuki, Masataka
Visualisation of Traffic Behaviour Using Computer Simulation Models
 Journal of Maps ISSN: (Print) 1744-5647 (Online) Journal homepage: http://www.tandfonline.com/loi/tjom20 Visualisation of Traffic Behaviour Using Computer Simulation Models Joerg M. Tonndorf & Vladimir
Journal of Maps ISSN: (Print) 1744-5647 (Online) Journal homepage: http://www.tandfonline.com/loi/tjom20 Visualisation of Traffic Behaviour Using Computer Simulation Models Joerg M. Tonndorf & Vladimir
Kalman Filters. Jonas Haeling and Matthis Hauschild
 Jonas Haeling and Matthis Hauschild Universität Hamburg Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme November 9, 2014 J. Haeling and M. Hauschild
Jonas Haeling and Matthis Hauschild Universität Hamburg Fakultät für Mathematik, Informatik und Naturwissenschaften Technische Aspekte Multimodaler Systeme November 9, 2014 J. Haeling and M. Hauschild
Interaction in Urban Traffic Insights into an Observation of Pedestrian-Vehicle Encounters
 Interaction in Urban Traffic Insights into an Observation of Pedestrian-Vehicle Encounters André Dietrich, Chair of Ergonomics, TUM andre.dietrich@tum.de CARTRE and SCOUT are funded by Monday, May the
Interaction in Urban Traffic Insights into an Observation of Pedestrian-Vehicle Encounters André Dietrich, Chair of Ergonomics, TUM andre.dietrich@tum.de CARTRE and SCOUT are funded by Monday, May the
MATLAB 및 Simulink 를이용한운전자지원시스템개발
 MATLAB 및 Simulink 를이용한운전자지원시스템개발 김종헌차장 Senior Application Engineer MathWorks Korea 2015 The MathWorks, Inc. 1 Example : Sensor Fusion with Monocular Vision & Radar Configuration Monocular Vision installed
MATLAB 및 Simulink 를이용한운전자지원시스템개발 김종헌차장 Senior Application Engineer MathWorks Korea 2015 The MathWorks, Inc. 1 Example : Sensor Fusion with Monocular Vision & Radar Configuration Monocular Vision installed
Dynamic Model-Based Filtering for Mobile Terminal Location Estimation
 1012 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 52, NO. 4, JULY 2003 Dynamic Model-Based Filtering for Mobile Terminal Location Estimation Michael McGuire, Member, IEEE, and Konstantinos N. Plataniotis,
1012 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 52, NO. 4, JULY 2003 Dynamic Model-Based Filtering for Mobile Terminal Location Estimation Michael McGuire, Member, IEEE, and Konstantinos N. Plataniotis,
A Steady State Decoupled Kalman Filter Technique for Multiuser Detection
 A Steady State Decoupled Kalman Filter Technique for Multiuser Detection Brian P. Flanagan and James Dunyak The MITRE Corporation 755 Colshire Dr. McLean, VA 2202, USA Telephone: (703)983-6447 Fax: (703)983-6708
A Steady State Decoupled Kalman Filter Technique for Multiuser Detection Brian P. Flanagan and James Dunyak The MITRE Corporation 755 Colshire Dr. McLean, VA 2202, USA Telephone: (703)983-6447 Fax: (703)983-6708
GPS Technical Overview N5TWP NOV08. How Can GPS Mislead
 GPS Technical Overview How Can GPS Mislead 1 Objectives Components of GPS Satellite Acquisition Process Position Determination How can GPS Mislead 2 Components of GPS Control Segment Series of monitoring
GPS Technical Overview How Can GPS Mislead 1 Objectives Components of GPS Satellite Acquisition Process Position Determination How can GPS Mislead 2 Components of GPS Control Segment Series of monitoring
Satellite and Inertial Attitude. A presentation by Dan Monroe and Luke Pfister Advised by Drs. In Soo Ahn and Yufeng Lu
 Satellite and Inertial Attitude and Positioning System A presentation by Dan Monroe and Luke Pfister Advised by Drs. In Soo Ahn and Yufeng Lu Outline Project Introduction Theoretical Background Inertial
Satellite and Inertial Attitude and Positioning System A presentation by Dan Monroe and Luke Pfister Advised by Drs. In Soo Ahn and Yufeng Lu Outline Project Introduction Theoretical Background Inertial
Digital Broadcast Radio Predicted On-Air Coverage North East Wales and West Cheshire Local DAB Multiplex
 Digital Broadcast Radio Predicted On-Air Coverage North East Wales and West Cheshire Local DAB Multiplex Publication date: August 2013 DAB coverage maps All local digital radio (DAB) services have a specified
Digital Broadcast Radio Predicted On-Air Coverage North East Wales and West Cheshire Local DAB Multiplex Publication date: August 2013 DAB coverage maps All local digital radio (DAB) services have a specified
Performance Measurement of a Bluetooth-based Floating Car Observer
 Available online at www.sciencedirect.com ScienceDirect Transportation Research Procedia 25C (2017) 1839 1850 www.elsevier.com/locate/procedia World Conference on Transport Research - WCTR 2016 Shanghai.
Available online at www.sciencedirect.com ScienceDirect Transportation Research Procedia 25C (2017) 1839 1850 www.elsevier.com/locate/procedia World Conference on Transport Research - WCTR 2016 Shanghai.
Adaptive signal Control. Tom Mathew
 Adaptive signal Control Tom Mathew Adaptive Control: Outline 1. Signal Control Taxonomy 2. Coordinated Signal System 3. Vehicle Actuated System 4. Area Traffic Control (Responsive) 5. Adaptive Traffic
Adaptive signal Control Tom Mathew Adaptive Control: Outline 1. Signal Control Taxonomy 2. Coordinated Signal System 3. Vehicle Actuated System 4. Area Traffic Control (Responsive) 5. Adaptive Traffic
Bayesian Positioning in Wireless Networks using Angle of Arrival
 Bayesian Positioning in Wireless Networks using Angle of Arrival Presented by: Rich Martin Joint work with: David Madigan, Eiman Elnahrawy, Wen-Hua Ju, P. Krishnan, A.S. Krishnakumar Rutgers University
Bayesian Positioning in Wireless Networks using Angle of Arrival Presented by: Rich Martin Joint work with: David Madigan, Eiman Elnahrawy, Wen-Hua Ju, P. Krishnan, A.S. Krishnakumar Rutgers University
Digital Broadcast Radio Predicted On-Air Coverage Hereford & Worcestershire Block 12A Local DAB Multiplex
 Digital Broadcast Radio Predicted On-Air Coverage Hereford & Worcestershire Block 12A Local DAB Multiplex Publication date: July 2018 DAB coverage maps All local digital radio (DAB) services have a specified
Digital Broadcast Radio Predicted On-Air Coverage Hereford & Worcestershire Block 12A Local DAB Multiplex Publication date: July 2018 DAB coverage maps All local digital radio (DAB) services have a specified
Evaluating a Signal Control System Using a Real-time Traffic Simulator Connected to a Traffic Signal Controller
 Evaluating a Signal Control System Using a Real-time Traffic Simulator Connected to a Traffic Signal Controller Kazama, T. 1, N. Honda 2 and T. Watanabe 2 1 Kyosan Electric Mfg Co. Ltd.,Yokohama City,
Evaluating a Signal Control System Using a Real-time Traffic Simulator Connected to a Traffic Signal Controller Kazama, T. 1, N. Honda 2 and T. Watanabe 2 1 Kyosan Electric Mfg Co. Ltd.,Yokohama City,
Predict and Improve Support Cost and KPI for TERRIER Combat Engineer Vehicle
 Predict and Improve Support Cost and KPI for TERRIER Combat Engineer Vehicle Presented by: - Richard Dobie - TERRIER Equipment Support Manager, BAE SYSTEMS, Global Combat systems Vehicles (BAES GCS-V)
Predict and Improve Support Cost and KPI for TERRIER Combat Engineer Vehicle Presented by: - Richard Dobie - TERRIER Equipment Support Manager, BAE SYSTEMS, Global Combat systems Vehicles (BAES GCS-V)
Cooperative localization (part I) Jouni Rantakokko
 Jouni Rantakokko") Cooperative localization (part I) Jouni Rantakokko Cooperative applications / approaches Wireless sensor networks Robotics Pedestrian localization First responders Localization sensors - Small, low-cost
Cooperative localization (part I) Jouni Rantakokko Cooperative applications / approaches Wireless sensor networks Robotics Pedestrian localization First responders Localization sensors - Small, low-cost
Flight Demonstration of the Separation Analysis Methodology for Continuous Descent Arrival
 Flight Demonstration of the Separation Analysis Methodology for Continuous Descent Arrival Liling Ren & John-Paul B. Clarke Air Transportation Laboratory School of Aerospace Engineering Georgia Institute
Flight Demonstration of the Separation Analysis Methodology for Continuous Descent Arrival Liling Ren & John-Paul B. Clarke Air Transportation Laboratory School of Aerospace Engineering Georgia Institute
sensors ISSN
 Sensors 2013, 13, 1467-1476; doi:10.3390/s130201467 OPEN ACCESS sensors ISSN 1424-8220 www.mdpi.com/journal/sensors Article Virtual Induction Loops Based on Cooperative Vehicular Communications Marco Gramaglia
Sensors 2013, 13, 1467-1476; doi:10.3390/s130201467 OPEN ACCESS sensors ISSN 1424-8220 www.mdpi.com/journal/sensors Article Virtual Induction Loops Based on Cooperative Vehicular Communications Marco Gramaglia
Building Optimal Statistical Models with the Parabolic Equation Method
 PIERS ONLINE, VOL. 3, NO. 4, 2007 526 Building Optimal Statistical Models with the Parabolic Equation Method M. Le Palud CREC St-Cyr Telecommunications Department (LESTP), Guer, France Abstract In this
PIERS ONLINE, VOL. 3, NO. 4, 2007 526 Building Optimal Statistical Models with the Parabolic Equation Method M. Le Palud CREC St-Cyr Telecommunications Department (LESTP), Guer, France Abstract In this
0-6920: PROACTIVE TRAFFIC SIGNAL TIMING AND COORDINATION FOR CONGESTION MITIGATION ON ARTERIAL ROADS. TxDOT Houston District
 0-6920: PROACTIVE TRAFFIC SIGNAL TIMING AND COORDINATION FOR CONGESTION MITIGATION ON ARTERIAL ROADS TxDOT Houston District October 10, 2017 PI: XING WU, PHD, PE CO-PI: HAO YANG, PHD DEPT. OF CIVIL & ENVIRONMENTAL
0-6920: PROACTIVE TRAFFIC SIGNAL TIMING AND COORDINATION FOR CONGESTION MITIGATION ON ARTERIAL ROADS TxDOT Houston District October 10, 2017 PI: XING WU, PHD, PE CO-PI: HAO YANG, PHD DEPT. OF CIVIL & ENVIRONMENTAL
Digital Broadcast Radio Predicted On-Air Coverage Lancashire Block 12A Local DAB Multiplex
 Digital Broadcast Radio Predicted On-Air Coverage Lancashire Block 12A Local DAB Multiplex Publication date: August 2018 DAB coverage maps All local digital radio (DAB) services have a specified licence
Digital Broadcast Radio Predicted On-Air Coverage Lancashire Block 12A Local DAB Multiplex Publication date: August 2018 DAB coverage maps All local digital radio (DAB) services have a specified licence
Automatic Vehicles Detection from High Resolution Satellite Imagery Using Morphological Neural Networks
 Automatic Vehicles Detection from High Resolution Satellite Imagery Using Morphological Neural Networks HONG ZHENG Research Center for Intelligent Image Processing and Analysis School of Electronic Information
Automatic Vehicles Detection from High Resolution Satellite Imagery Using Morphological Neural Networks HONG ZHENG Research Center for Intelligent Image Processing and Analysis School of Electronic Information
ROAD TRAFFIC MEASUREMENT AND RELATED DATA FUSION METHODOLOGY FOR TRAFFIC ESTIMATION
 Transport and Telecommunication, 2014, volume15, no. 4, 269 279 Transport and Telecommunication Institute, Lomonosova 1, Riga, LV-1019, Latvia DOI 10.2478/ttj-2014-0023 ROAD TRAFFIC MEASUREMENT AND RELATED
Transport and Telecommunication, 2014, volume15, no. 4, 269 279 Transport and Telecommunication Institute, Lomonosova 1, Riga, LV-1019, Latvia DOI 10.2478/ttj-2014-0023 ROAD TRAFFIC MEASUREMENT AND RELATED
A1.1 Coverage levels in trial areas compared to coverage levels throughout UK
 Annex 1 A1.1 Coverage levels in trial areas compared to coverage levels throughout UK To determine how representative the coverage in the trial areas is of UK coverage as a whole, a dataset containing
Annex 1 A1.1 Coverage levels in trial areas compared to coverage levels throughout UK To determine how representative the coverage in the trial areas is of UK coverage as a whole, a dataset containing
Clustering of traffic accidents with the use of the KDE+ method
 Richard Andrášik*, Michal Bíl Transport Research Centre, Líšeňská 33a, 636 00 Brno, Czech Republic *e-mail: andrasik.richard@gmail.com Clustering of traffic accidents with the use of the KDE+ method TABLE
Richard Andrášik*, Michal Bíl Transport Research Centre, Líšeňská 33a, 636 00 Brno, Czech Republic *e-mail: andrasik.richard@gmail.com Clustering of traffic accidents with the use of the KDE+ method TABLE
Verification for Proving the Route Choice Dependence of Motorists Yi Dan 1, a, Shunying Zhu 2, b, Xiaohu Nie 3, c, Yin Chen 4, d, Zipei Zhang 5, e
 Advanced Materials Research Online: 2013-09-04 ISSN: 1662-8985, Vols. 765-767, pp 1427-1430 doi:10.4028/www.scientific.net/amr.765-767.1427 2013 Trans Tech Publications, Switzerland Verification for Proving
Advanced Materials Research Online: 2013-09-04 ISSN: 1662-8985, Vols. 765-767, pp 1427-1430 doi:10.4028/www.scientific.net/amr.765-767.1427 2013 Trans Tech Publications, Switzerland Verification for Proving
Digital Broadcast Radio Predicted On-Air Coverage Southend and Chelmsford Local DAB multiplex
 Digital Broadcast Radio Predicted On-Air Coverage Southend and Chelmsford Local DAB multiplex Publication date: January 2013 DAB coverage maps All local digital radio (DAB) services have a specified licence
Digital Broadcast Radio Predicted On-Air Coverage Southend and Chelmsford Local DAB multiplex Publication date: January 2013 DAB coverage maps All local digital radio (DAB) services have a specified licence
Comparing the State Estimates of a Kalman Filter to a Perfect IMM Against a Maneuvering Target
 14th International Conference on Information Fusion Chicago, Illinois, USA, July -8, 11 Comparing the State Estimates of a Kalman Filter to a Perfect IMM Against a Maneuvering Target Mark Silbert and Core
14th International Conference on Information Fusion Chicago, Illinois, USA, July -8, 11 Comparing the State Estimates of a Kalman Filter to a Perfect IMM Against a Maneuvering Target Mark Silbert and Core
Digital Broadcast Radio Predicted On-Air Coverage Manchester Block 12C Local DAB Multiplex
 Digital Broadcast Radio Predicted On-Air Coverage Manchester Block 12C Local DAB Multiplex Publication date: June 2017 DAB coverage maps All local digital radio (DAB) services have a specified licence
Digital Broadcast Radio Predicted On-Air Coverage Manchester Block 12C Local DAB Multiplex Publication date: June 2017 DAB coverage maps All local digital radio (DAB) services have a specified licence
Discussion on the Deterministic Approaches for Evaluating the Voltage Deviation due to Distributed Generation
 Discussion on the Deterministic Approaches for Evaluating the Voltage Deviation due to Distributed Generation TSAI-HSIANG CHEN a NIEN-CHE YANG b Department of Electrical Engineering National Taiwan University
Discussion on the Deterministic Approaches for Evaluating the Voltage Deviation due to Distributed Generation TSAI-HSIANG CHEN a NIEN-CHE YANG b Department of Electrical Engineering National Taiwan University
1 of REV:0
 1 of 5 683-10573-0418 This specification sets forth the minimum requirements for purchase and installation of an aboveground Radar Advance Detection Device (RADD) system for a real-time, advance vehicle-detection
1 of 5 683-10573-0418 This specification sets forth the minimum requirements for purchase and installation of an aboveground Radar Advance Detection Device (RADD) system for a real-time, advance vehicle-detection
Exploiting Geo-fences to Document Truck Activity Times at the Ambassador and Blue Water Bridge Gateways
 Exploiting Geo-fences to Document Truck Activity Times at the Ambassador and Blue Water Bridge Gateways Mark R. McCord The Ohio State University Columbus, OH Ohio Freight Conference Toledo, Ohio September
Exploiting Geo-fences to Document Truck Activity Times at the Ambassador and Blue Water Bridge Gateways Mark R. McCord The Ohio State University Columbus, OH Ohio Freight Conference Toledo, Ohio September
Sensor Data Fusion Using a Probability Density Grid
 Sensor Data Fusion Using a Probability Density Grid Derek Elsaesser Communication and avigation Electronic Warfare Section DRDC Ottawa Defence R&D Canada Derek.Elsaesser@drdc-rddc.gc.ca Abstract - A novel
Sensor Data Fusion Using a Probability Density Grid Derek Elsaesser Communication and avigation Electronic Warfare Section DRDC Ottawa Defence R&D Canada Derek.Elsaesser@drdc-rddc.gc.ca Abstract - A novel
ANNUAL OF NAVIGATION 16/2010
 ANNUAL OF NAVIGATION 16/2010 STANISŁAW KONATOWSKI, MARCIN DĄBROWSKI, ANDRZEJ PIENIĘŻNY Military University of Technology VEHICLE POSITIONING SYSTEM BASED ON GPS AND AUTONOMIC SENSORS ABSTRACT In many real
ANNUAL OF NAVIGATION 16/2010 STANISŁAW KONATOWSKI, MARCIN DĄBROWSKI, ANDRZEJ PIENIĘŻNY Military University of Technology VEHICLE POSITIONING SYSTEM BASED ON GPS AND AUTONOMIC SENSORS ABSTRACT In many real
Frequently Asked Questions
 The Synchro Studio support site is available for users to submit questions regarding any of our software products. Our goal is to respond to questions (Monday - Friday) within a 24-hour period. Most questions
The Synchro Studio support site is available for users to submit questions regarding any of our software products. Our goal is to respond to questions (Monday - Friday) within a 24-hour period. Most questions
Final Report. In-car Mobile Signal Attenuation Measurements. Final report 8th November 2017
 Final Report In-car Mobile Signal Attenuation Final report 8th November 2017 Contact person: Mr. Saul Friedner Tel: +44 (0)20 3740 6472 Mob: +44 (0) 7931 824500 Email: SFriedner@lstelcom.com LS telcom
Final Report In-car Mobile Signal Attenuation Final report 8th November 2017 Contact person: Mr. Saul Friedner Tel: +44 (0)20 3740 6472 Mob: +44 (0) 7931 824500 Email: SFriedner@lstelcom.com LS telcom