Fundamentals of GPS Navigation
|
|
|
- Martin Long
- 5 years ago
- Views:
Transcription
1 Fundamentals of GPS Navigation Kiril Alexiev 1 /76

2 2 /76
3 At the traditional January media briefing in Paris (January 18, 2017), European Space Agency (ESA) General Director Jan Woerner explained the knowns and unknowns about the failed rubidium and hydrogen maser clocks onboard orbiting Galileo satellites, clocks that are absolutely crucial for accurate positioning. 3 /76
4 Each Galileo satellite is equipped with four clocks - two rubidium and two passive hydrogen masers in order to have redundancy. It was thought that the new type of hydrogen maser will improve accuracy. But unfortunately many rubidium clocks as well as hydrogen maser clocks failed. In all, nine of the 72 orbiting clocks have failed - three rubidium clocks and six hydrogen masers. One additional hydrogen maser clock failed but it has been successfully restarted later. 4 /76
5 According to ESA, the Italian-produced hydrogen maser clock is the master clock on the Galileo satellite s payload. Its extremely good performance makes it the most stable of all clocks currently in space, better than one nanosecond per day, according to the agency. Some other features: 18 kilograms of mass, 28 liters of volume, and 20 years expected lifetime. 5 /76

6 Passive hydrogen maser atomic clock of the type flown on Galileo, accurate to one second in three million years. 6 /76

7 One reference point 7 /76

8 The difference between two way positioning and one-way 8 /76

9 Network of points 9 /76

10 Network of points in the space 10 /76
11 Global Navigation Satellite Systems GNSS is a technology for outdoor navigation. The most popular example is GPS, which is a constellation of satellites that transmit encoded radio frequency (RF) signals. By means of trilateration, ground receivers can calculate their position using the travel time of the satellites s signals and information about their current location, this being included in the transmitted signal. 11 /76
12 GPS or GNSS? The Global Positioning System (GPS) was once the only global navigation satellite system in operation. Today, there are numerous satellite systems dedicated to providing time and location signals for both military and civilian use. They include Russia s GLONASS, China s BeiDou and Europe s Galileo, as well as a number of regional systems. Collectively, these systems are known as Global Navigation Satellite Systems (GNSS). 12 /76
 Orbital height Orbital characteristics February 1978; 39 years ago (1978-02) 6x MEO planes 20,180 km (12,540 mi) 13")
13 Country of originry of origin Operator(s) Type Status Coverage Precision GPS United States AFSPC Military, civilian Operational Global 5 meters Constellation size Total satellites 32 Satellites in orbit 31 First launch Total launches 72 Regime(s) Orbital height Orbital characteristics February 1978; 39 years ago ( ) 6x MEO planes 20,180 km (12,540 mi) 13 /76



14 Glonass Country of origin Russia Operator(s) VKO Type Military, civilian Status Operational Coverage Global Precision meters Constellation size Total satellites 27 Satellites in orbit 24 First launch October 1982 Last launch May 28, 2016 Orbital characteristics Regime(s) 3x MEO Orbital height 19,130 km 14 /76

 Orbital height 1 metre (public) 1 cm (encrypted)")
 3x MEO planes 23,222 km")
15 Country of origin Operator(s) Type Status Coverage Precision Galileo European Union GSA, ESA Civilian, commercial Operational Global Constellation size Total satellites 30 Satellites in orbit First launch 2011 Regime(s) Orbital height 1 metre (public) 1 cm (encrypted) Orbital characteristics 11 operational + 4 under commissioning and 3 for testing or not available (January 2017) 3x MEO planes 23,222 km (14,429 mi) 15 /76

 10 cm (encrypted) Orbital")
 6 GEO +")
16 Country of origin Operator(s) Type Status Coverage Precision Total satellites Satellites in orbit BeiDou - 2 China Civilian, military Operational Partial Constellation size First launch 2007 Regime(s) Orbital height 10 metre (public) 10 cm (encrypted) Orbital characteristics 30 non stationary; 5 stationary 15 operational + 4 under commissioning and 3 for testing or not available (January 2017) 6 GEO + 5 IGSO + 4 MEO 21,150 km 16 /76
17 17 /76
18 GPS accuracy The government is committed to providing GPS at the accuracy levels specified in the GPS Standard Positioning Service (SPS) Performance Standard. The accuracy commitments is applied to the signals transmitted in space. For example, the government commits to broadcasting the GPS signal in space with a global average user range error of 7.8 m, with 95% probability. Actual performance exceeds the specification. On May 11, 2016, the global average URE was m, 95% of the time. In May 2000 the U.S. government ended the use of Selective Availability in order to make GPS more responsive to civil and commercial users worldwide. The United States has no intent to ever use Selective Availability again. 18 /76

19 Lat. Long. Height Number of satellites 19 /76

20 Lat. Long. Height Number of satellites 20 /76

21 GPS Structure - Space Segment - Control Segment - User Segment 21 /76
22 Space segment A constellation of at least 24 satellites orbiting the Earth in nearly circular orbits at an altitude of about 20,000 km. They occupy six orbits inclined at 55 to the equator, each with four primary satellites which are unevenly distributed. The orbital period is about 12 h. 22 /76
23 Control segment The control segment is responsible for the overall control and maintenance of the system, and its functionalities are: Monitoring and maintaining the orbit of each satellite in the constellation by manoeuvring and relocation (if needed). Ensuring the performance of the satellites. Maintenance of the GPS system time. Prediction of the ephemerides and clock parameters of each satellite, and periodic uploading of this information to keep the navigation message up to date. 23 /76
24 System Master Control 24 /76
25 User segment This segment consists of receivers which receive the radio frequency signals from GPS satellites and estimate their position, velocity and time. Users of GPS can be classified into civilian and military. 25 /76
26 How GNSS work? Each satellite transmits a radio signal that contains a pseudo-random noise (PRN) code and a navigation message. The PRN code is used by the receiver to find the transit time, as a preliminary to calculating the range (called pseudo-range ) from the satellite to the receiver by multiplying this by the speed of light. It also calculates the satellite s position from the information in the navigation message. 26 /76
27 With the information from at least three satellites the receiver can use the process of trilateration to calculate its own position in terms of latitude, longitude and altitude. The signal from the fourth satellite is needed to cancel the receiver s clock bias. 27 /76
28 GPS Signals GPS satellites transmit signals on two frequencies L1 and L2. Each frequency is modulated by pseudo-random noise (PRN) sequence for precise range measurements. A coarse acquisition (C/A) code is associated with the standard positioning service (SPS) for civilian use. The precise code (P-code) is associated with the precise positioning service (PPS). This is further encrypted to the P(Y)-code for authorized military users. L1 is modulated by both C/A and P-codes, whereas L2 is modulated by P-code only. 28 /76
29 GPS Signals With the removal of selective availability (SA) both the codes have equal accuracy, which is around 5 to 30 m for single GPS receivers. The receiver must determine the position of the satellite in order to use the navigation message to convert the range measurements into the position and velocity of the user. The navigation message is superimposed on both the L1 and L2 carriers. 29 /76
30 GPS Signals Fundamental frequency f 0 =10.23 MHz L1 = 154. f 0 = MHz L2 = 120. f 0 = MHz C/A code 1ms long sequence of +-1 step at f 0 /10 P code 267 day long sequence of +-1 step at f 0 Message 1500 bit sequence of +-1 step at 50 bps Phase modulation technique Phase Shift 30 /76
31 A GPS receiver can make basically only two kinds of measurements: pseudo-range, and carrier beat phase. Pseudo-range is the time shift required to line up a replica of the code generated in the receiver with the received code from the satellite multiplied by the speed of light. Ideally the time shift is the difference between the time of signal reception and the time of emission (measured in the satellite time frame). In fact, the two time frames will be different, which introduces a bias into the measurement. These biased time delay measurements are thus referred to as pseudo-ranges. 31 /76
32 The precision of pseudo-range measurements is 1% of the period between successive code epochs. For the C/A-code the range measurement precision is 3 metres. 32 /76
33 For the P-code, the numbers are ten times more precisely in comparison with C/A code, successive epochs are 0.1 microsecond apart, implying a measurement precision of 1 nanosecond. When multiplied by the speed of light, this implies a range measurement precision of 30 centimetres. 33 /76
34 Carrier beat phase is the phase of the signal which remains when the incoming Doppler-shifted satellite carrier is differenced (beat) with the constant frequency generated in the receiver. It can be obtained as a byproduct of the correlation channel or from a squaring channel. A squaring channel multiplies the received signal by itself to obtain a second harmonic of the carrier, which does not contain the code modulation. Since A 2 =1 he resulting signal, y 2 is then pure carrier, but at twice the original frequency. 34 /76
35 Because the wavelength of the carrier is much shorter than the wavelength of either of the codes, the precision of carrier beat phase measurements is much higher than the precision of code pseudo-ranges. For the GPS L1 carrier signal, the wavelength is about 20 cm. The phase measurements can be made to about 1% of the wavelength, this implies a precision of 2 mm. 35 /76
36 Two disadvantages of carrier beat phase measurements have to be resolved: Obtaining the initial number of integer cycles of the carrier between the satellite and the receiver is very difficult. Maintaining an integer cycle count as the satellite-toreceiver range changes with time is something most good quality GPS receivers can do most of the time. However, due to noisy signal or a shaded antenna, any receiver could suffer cycle slips, or the loss of a coherent integer cycle count. In many cases painstaking postprocessing permits the detection and correction of cycle slips. 36 /76
37 GPS Error Sources Satellite Clock Error Although fairly accurate, over time satellite clocks drift away from GPS system time. Based on the observed satellite clock data provided by monitoring stations, the control segment estimates the correction parameters for the satellite clocks and uploads them to the satellites, which broadcast these parameters in the navigation message to enable a receiver to correct for satellite clock error in a measured range. 37 /76
38 Receiver Clock Error Receiver clocks are meant to be inexpensive for affordability. Consequently they are much less accurate than the satellite clocks and contain a bias. This clock bias error affects all measurements in same manner. Therefore if four pseudo-range measurements are available, the clock bias can be estimated along with the three components required to determine the position of the user. This is usually done by a Kalman filter. 38 /76

39 Ionospheric and tropospheric effects on GPS signals for various elevation angles 39 /76
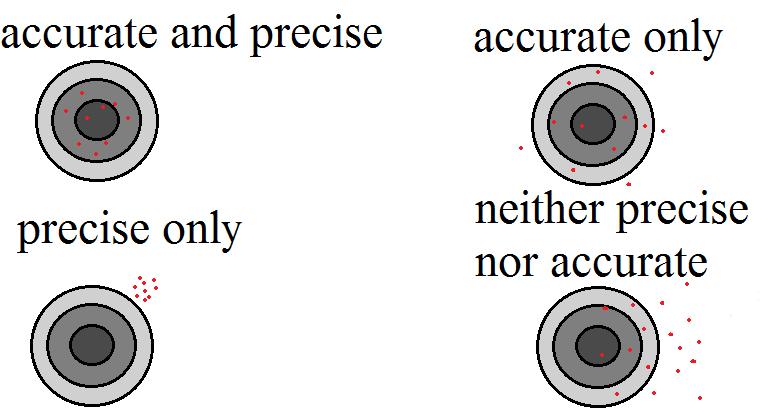
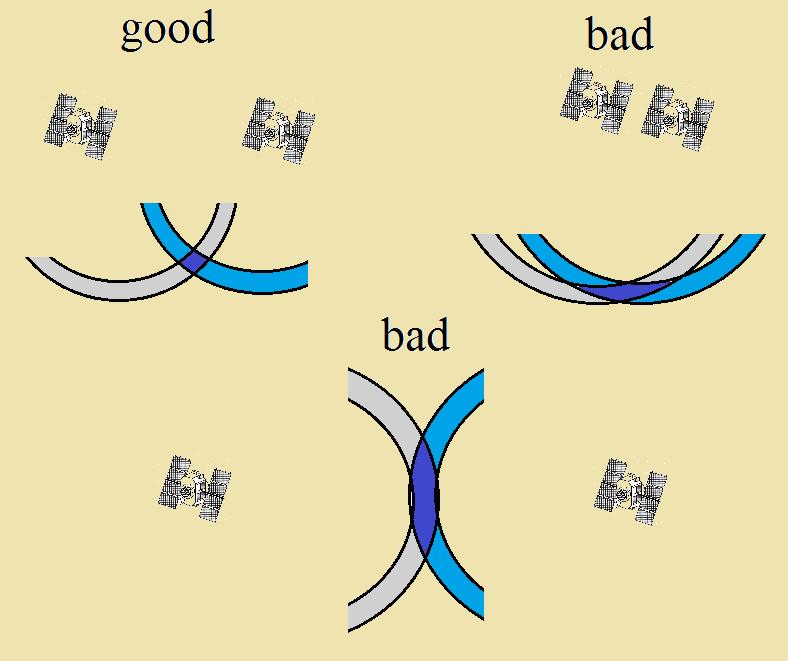
40 Ionosphere Delay The ionosphere is the layer of the atmosphere with ionized gases approximately from 60 to 1,000 km above the Earth s surface. The ionization level of this layer changes with solar activity, affecting the refractive indices of the various layers of the ionosphere and, as a result, changing the transit time of a GPS signal. Satellite elevation also adds to the variability of this error, because signals from low elevation satellites pass a greater slant-range distance through the ionosphere than those at higher elevations. The ionospheric delay in pseudo-range and carrier phase is equal but opposite in sign and is expressed as: 40 /76
41 Dual frequency GPS receivers equipped with both L1 and L2 are able to calculate ionospheric delay much more accurately. A single frequency receiver relies on the Klobuchar model, whose parameters are broadcasted by the satellites. 41 /76
42 Tropospheric Delay The troposphere is extending from 8 to 40 km above the Earth s surface and it is mainly composed of dry gases (N 2 and O 2 ) and water vapor. Unlike the ionosphere, the troposphere, being electrically neutral, is non-dispersive for GPS frequencies but since it is refractive it causes a decrease in speed relative to free space. Therefore apparent ranges appear longer by m depending upon the elevation angle of the satellite. Tropospheric errors are consistent between L1 and L2 carriers. Tropospheric delay has a dry component responsible for 90 % of the delay and a wet component for the rest 10 %. 42 /76

43 Multipath Errors Multipath is a major error source in urban environments where the GPS signal is able to reach the receiver by several different paths. These paths include direct line of sight and reflected signals from other objects around the receiving antenna. The signal that arrives indirectly is delayed and has a lower signal to noise ratio. Multipath distorts the original signal because of interference with the reflected signals at the receiving antenna. This can cause a position error in excess of 10 m. The multipath error is two orders of magnitude lower for carrier phase measurements than for pseudo-range measurements. 43 /76

44 Ground Reflection when 44 /76
45 Why always the error in height determination is bigger? Vertical datum is a surfice, that best fit mean sea level. is orthometric height (topographic). The difference H- h is not more than 100 m! 45 /76
46 Satellite Orbital Errors Satellite orbital errors are caused by difference between the actual position of a satellite in space and the position of the satellite calculated by the receiver using ephemeris data. Depending on the previous motion of the satellite and knowledge of Earth s gravity, the orbital errors are predicted by the control segment and uploaded to the satellites for broadcast to the users as ephemeris data. Since the ephemeris model is a curve fit to the measured orbit, it will include time varying residual errors relative to the actual orbit. Typically, this error is between 2 and 5 m. 46 /76
. 2. The satellite radius vector (i.e., the line joining the earth's centre to the satellite) sweeps out equal areas in equal time.")
47 The idealized satellite motion obeys to Kepler laws: 1. The satellite motion occurs in a stationary plane which contains the centre of mass of the earth. The orbit is a conic with one of the foci located at the earth's centre of mass (the geocentre). 2. The satellite radius vector (i.e., the line joining the earth's centre to the satellite) sweeps out equal areas in equal time. 47 /76
48 Non-central part of the earth's gravitational attraction. The density distribution within the earth departs considerably from radial symmetry. Third-body effects. Tides. The gravitational attractions of the moon and the sun also have an indirect effect on satellite motion. Solar radiation pressure. Atmospheric drag. 48 /76
49 Determination of Satellite position One of the most precise positioning techniques is laser ranging. A short pulse of intense laser light is directed to a satellite equiped with light reflector. A part of reflected light is collected by a telescope with sensitive photo receiver (from a single photon and more). The achieved accuracy of ranging ~ 2 cm RMS. The accuracy of determination of the baseline 3 5 cm. The stations are static and mobile ones. 49 /76
50 The prediction of the position of the satellites in time is a rather difficult task. It is possible for the user of the system to improve the satellite position estimates in two different modes: by using additional tracking stations in real time or by using optimal tracking algorithms over past (old) data (forward - backward). The enhancement could reach more than an order. 50 /76
51 Receiver Noise This is a random measurement noise intrinsic to the electronics of a GPS receiver. It is caused by the cumulative effects of antenna circuitry, cables, thermal noise, RF signal interference, signal quantization and sampling. Since it is a function of the signal to noise ratio, it varies with the satellite elevation angle. It gives rise to an incorrect measurement of the transit time of the GPS signal. As in the case of the multipath effect, receiver noise is two orders of magnitude lower for carrier phase measurements than for pseudo-range measurements. 51 /76
52 GPS GEOMETRY AND ACCURACY The accuracy depends on two factors: the satellite configuration geometry, and the measurement accuracy. The effect of satellite configuration geometry is expressed by the dilution of precision (DOP) factor, which is the ratio of the positioning accuracy to the measurement accuracy. 52 /76
53 The more common DOPs are: VDOP - the standard deviation in height (Vertical) HDOP - the accuracy in 2D Horizontal position PDOP - the accuracy in 3D Position TDOP - the standard deviation in Time HTDOP - the accuracy in Horizontal position and Time GDOP - the accuracy in 3D position, and time (Geometrical) σ posit =DOP. σ meas 53 /76
54 54 /76
55 Differential GPS (DGPS) DGPS is broadly categorized into two techniques based on the area in which they can mitigate GPS errors, the local area DGPS (LADGPS) and the wide area DGPS (WADGPS). 55 /76
56 Local Area DGPS In LADGPS, a single reference station (RS) calculates the pseudo-ranges with code-phase measurements and, based on accurate knowledge of its position, determines the bias in the measurements for all the visible satellites. These differential corrections are transmitted to the users in the area on a radio link for real-time applications. The errors include ephemeris prediction errors, uncorrelated satellite perturbations, and errors introduced by the atmosphere. These corrections are more accurate for users who are closer to the RS. 56 /76

57 Local Area DGPS 57 /76
58 Wide Area DGPS As the GPS receiver moves farther away from the associated RS, the correlation between errors reduces and they become spatially correlated, with the result that the errors estimated at the RS can become different from those experienced by the user. This situation can be ameliorated by expanding the coverage by adding more reference stations along the perimeter of the area covered by the single RS. The receiver weights the corrections based on its proximity to each individual RS. This method of differential correction, called wide area DGPS (WADGPS) 58 /76
59 Signal acquisition The first thing any GPS receiver must do is to acquire the satellite signals. If nothing is known the receiver must perform a 'cold start' and do an 'all sky search.' This involves selecting each of the 32 possible C/A-codes, and searching over all possible Doppler shifted frequencies for each signal, attempting to lock on to any one of them. This search may take as long as 30 minutes. This time can be reduced considerably if the receiver knows which satellites are visible, which limits the search to only a few of the 32 possible codes. If the satellite positions are known as well, then estimates of the Doppler shift can be predicted, limiting the frequency band over which the search must be performed. In this way, the search can be reduced to a few minutes. 59 /76
60 Signal Wavelengths 60 /76
61 From ephemeridis known From time of flight measured R =? Here Δt is receiver clock shift. If i>4 the system is overdetermined. The system is solved minimising RMS error. 61 /76
62 The L1 and L2 pseudorange measurements for the i-th satellite at time t can be modeled as: is the geometric distance between the receiver position and the i-th satellite position, c is the light speed and δt r is the receiver clock bias, identical for all channels of the receiver, f 1 = MHz and f 2 = MHz are the frequencies for L1 and L2 carrier, 62 /76
63 I r i is the Ionospheric delay caused by the ionization effect in the Ionosphere, T r i is the Tropospheric delay caused by the block from the Troposphere for the L-Band signal, M ρ1 i and M ρ2 i are multipath errors caused by signal reflections, n ρ1 i, n ρ1 i N(0, (σ ρi ) 2 ) is the (non-common mode) measurement noise. 63 /76
64 The L1 and L2 carrier phase measurements for the i-th satellite at time t can be modeled as: and λ 1 and λ 2 are the wavelength of the corresponding carrier signals, N i is the ambiguous integers representing the unknown number of whole cycles, 64 /76
65 are non-common mode errors similar to those of pseudorange measurements but with magnitude typically less of 1% of the respective errors in pseudorange measurements. Thus, carrier phase measurements have much lower noise level but are biased by the unknown integer ambiguity {N i }. 65 /76
66 66 /76
67 The choice of L band carriers represents a trade-off between the limited available bandwidth in UHF and the excessive atmospheric absorption, called space loss, of C band. The L band frequency is high enough to accommodate the 20 MHz bandwidth required and the centimeter wavelength enables precision velocity measurement. 67 /76
68 Navigation Message In addition to the PRN codes, a second block of information is digitally broadcast on both carriers. This navigation message is transmitted at the very slow rate of 50 bits per second, and is updated and repeated every 12.5 minutes. The navigation message contains a large amount of information provided to assist receivers in their operation. The system time of the week, known as the handover word, is provided to assist in acquiring the P code after the C/A code is acquired. The transmitting satellite provides precise ephemeris data on its own orbit for use in the navigation solution. 68 /76
69 Also, less accurate ephemeris data for all other satellites, known as the almanac, is transmitted to permit receivers to predict when new satellites will rise above the horizon and become available. The ephemeris data is described by the classical ellipse parameters discovered and defined by Kepler. Atmospheric delay model coefficients are provided since the magnitude of the delay varies significantly throughout the day. Satellites also provide information on their own health and the precision of range measurements that can be expected if their signals are used. In this way, receivers can pick an optimal set of satellites in view for their computations. 69 /76
70 The message consists of binary coded data with information about the satellite s health, ephemeris (its position and velocity), clock bias parameters, and an almanac that is a less precise version of the ephemeris data but for all the satellites of the constellation. The ephemeris and clock parameters are repeated every 30 s. The chipping rates of the P-code and C/A code are and M/sec respectively. The navigation message is broadcasted at the much lower rate of 50 bps and therefore takes 12.5 min to transmit all of the information. 70 /76
71 71 /76
72 72 /76
73 Errors 73 /76
74 74 /76
75 75 /76

76 Questions? 76 /76
Global Positioning System: what it is and how we use it for measuring the earth s movement. May 5, 2009
 Global Positioning System: what it is and how we use it for measuring the earth s movement. May 5, 2009 References Lectures from K. Larson s Introduction to GNSS http://www.colorado.edu/engineering/asen/
Global Positioning System: what it is and how we use it for measuring the earth s movement. May 5, 2009 References Lectures from K. Larson s Introduction to GNSS http://www.colorado.edu/engineering/asen/
GPS and Recent Alternatives for Localisation. Dr. Thierry Peynot Australian Centre for Field Robotics The University of Sydney
 GPS and Recent Alternatives for Localisation Dr. Thierry Peynot Australian Centre for Field Robotics The University of Sydney Global Positioning System (GPS) All-weather and continuous signal system designed
GPS and Recent Alternatives for Localisation Dr. Thierry Peynot Australian Centre for Field Robotics The University of Sydney Global Positioning System (GPS) All-weather and continuous signal system designed
FieldGenius Technical Notes GPS Terminology
 FieldGenius Technical Notes GPS Terminology Almanac A set of Keplerian orbital parameters which allow the satellite positions to be predicted into the future. Ambiguity An integer value of the number of
FieldGenius Technical Notes GPS Terminology Almanac A set of Keplerian orbital parameters which allow the satellite positions to be predicted into the future. Ambiguity An integer value of the number of
Modelling GPS Observables for Time Transfer
 Modelling GPS Observables for Time Transfer Marek Ziebart Department of Geomatic Engineering University College London Presentation structure Overview of GPS Time frames in GPS Introduction to GPS observables
Modelling GPS Observables for Time Transfer Marek Ziebart Department of Geomatic Engineering University College London Presentation structure Overview of GPS Time frames in GPS Introduction to GPS observables
GLOBAL POSITIONING SYSTEMS. Knowing where and when
 GLOBAL POSITIONING SYSTEMS Knowing where and when Overview Continuous position fixes Worldwide coverage Latitude/Longitude/Height Centimeter accuracy Accurate time Feasibility studies begun in 1960 s.
GLOBAL POSITIONING SYSTEMS Knowing where and when Overview Continuous position fixes Worldwide coverage Latitude/Longitude/Height Centimeter accuracy Accurate time Feasibility studies begun in 1960 s.
The Global Positioning System
 The Global Positioning System 5-1 US GPS Facts of Note DoD navigation system First launch on 22 Feb 1978, fully operational in 1994 ~$15 billion (?) invested to date 24 (+/-) Earth-orbiting satellites
The Global Positioning System 5-1 US GPS Facts of Note DoD navigation system First launch on 22 Feb 1978, fully operational in 1994 ~$15 billion (?) invested to date 24 (+/-) Earth-orbiting satellites
UNIT 1 - introduction to GPS
 UNIT 1 - introduction to GPS 1. GPS SIGNAL Each GPS satellite transmit two signal for positioning purposes: L1 signal (carrier frequency of 1,575.42 MHz). Modulated onto the L1 carrier are two pseudorandom
UNIT 1 - introduction to GPS 1. GPS SIGNAL Each GPS satellite transmit two signal for positioning purposes: L1 signal (carrier frequency of 1,575.42 MHz). Modulated onto the L1 carrier are two pseudorandom
Resection. We can measure direction in the real world! Lecture 10: Position Determination. Resection Example: Isola, Slovenia. Professor Keith Clarke
 Geography 12: Maps and Spatial Reasoning Lecture 10: Position Determination We can measure direction in the real world! Professor Keith Clarke Resection Resection Example: Isola, Slovenia Back azimuth
Geography 12: Maps and Spatial Reasoning Lecture 10: Position Determination We can measure direction in the real world! Professor Keith Clarke Resection Resection Example: Isola, Slovenia Back azimuth
GPS Milestones, cont. GPS Milestones. The Global Positioning Sytem, Part 1 10/10/2017. M. Helper, GEO 327G/386G, UT Austin 1. US GPS Facts of Note
 The Global Positioning System US GPS Facts of Note DoD navigation system First launch on 22 Feb 1978, fully operational in 1994 ~$15 billion (?) invested to date 24 (+/-) Earth-orbiting satellites (SVs)
The Global Positioning System US GPS Facts of Note DoD navigation system First launch on 22 Feb 1978, fully operational in 1994 ~$15 billion (?) invested to date 24 (+/-) Earth-orbiting satellites (SVs)
t =1 Transmitter #2 Figure 1-1 One Way Ranging Schematic
 1.0 Introduction OpenSource GPS is open source software that runs a GPS receiver based on the Zarlink GP2015 / GP2021 front end and digital processing chipset. It is a fully functional GPS receiver which
1.0 Introduction OpenSource GPS is open source software that runs a GPS receiver based on the Zarlink GP2015 / GP2021 front end and digital processing chipset. It is a fully functional GPS receiver which
GPS Error and Biases
 Component-I(A) - Personal Details Role Name Affiliation Principal Investigator Prof.MasoodAhsanSiddiqui Department of Geography, JamiaMilliaIslamia, New Delhi Paper Coordinator, if any Dr. Mahaveer Punia
Component-I(A) - Personal Details Role Name Affiliation Principal Investigator Prof.MasoodAhsanSiddiqui Department of Geography, JamiaMilliaIslamia, New Delhi Paper Coordinator, if any Dr. Mahaveer Punia
What is a GPS How does GPS work? GPS Segments GPS P osition Position Position Accuracy Accuracy Accuracy GPS A pplications Applications Applications
 What is GPS? What is a GPS How does GPS work? GPS Segments GPS Position Accuracy GPS Applications What is GPS? The Global Positioning System (GPS) is a precise worldwide radio-navigation system, and consists
What is GPS? What is a GPS How does GPS work? GPS Segments GPS Position Accuracy GPS Applications What is GPS? The Global Positioning System (GPS) is a precise worldwide radio-navigation system, and consists
Guochang Xu GPS. Theory, Algorithms and Applications. Second Edition. With 59 Figures. Sprin ger
 Guochang Xu GPS Theory, Algorithms and Applications Second Edition With 59 Figures Sprin ger Contents 1 Introduction 1 1.1 AKeyNoteofGPS 2 1.2 A Brief Message About GLONASS 3 1.3 Basic Information of Galileo
Guochang Xu GPS Theory, Algorithms and Applications Second Edition With 59 Figures Sprin ger Contents 1 Introduction 1 1.1 AKeyNoteofGPS 2 1.2 A Brief Message About GLONASS 3 1.3 Basic Information of Galileo
Sources of Error in Satellite Navigation Positioning
 http://www.transnav.eu the International Journal on Marine Navigation and Safety of Sea Transportation Volume 11 Number 3 September 2017 DOI: 10.12716/1001.11.03.04 Sources of Error in Satellite Navigation
http://www.transnav.eu the International Journal on Marine Navigation and Safety of Sea Transportation Volume 11 Number 3 September 2017 DOI: 10.12716/1001.11.03.04 Sources of Error in Satellite Navigation
Chapter 6 GPS Relative Positioning Determination Concepts
 Chapter 6 GPS Relative Positioning Determination Concepts 6-1. General Absolute positioning, as discussed earlier, will not provide the accuracies needed for most USACE control projects due to existing
Chapter 6 GPS Relative Positioning Determination Concepts 6-1. General Absolute positioning, as discussed earlier, will not provide the accuracies needed for most USACE control projects due to existing
Global Navigation Satellite Systems II
 Global Navigation Satellite Systems II AERO4701 Space Engineering 3 Week 4 Last Week Examined the problem of satellite coverage and constellation design Looked at the GPS satellite constellation Overview
Global Navigation Satellite Systems II AERO4701 Space Engineering 3 Week 4 Last Week Examined the problem of satellite coverage and constellation design Looked at the GPS satellite constellation Overview
PRINCIPLES AND FUNCTIONING OF GPS/ DGPS /ETS ER A. K. ATABUDHI, ORSAC
 PRINCIPLES AND FUNCTIONING OF GPS/ DGPS /ETS ER A. K. ATABUDHI, ORSAC GPS GPS, which stands for Global Positioning System, is the only system today able to show you your exact position on the Earth anytime,
PRINCIPLES AND FUNCTIONING OF GPS/ DGPS /ETS ER A. K. ATABUDHI, ORSAC GPS GPS, which stands for Global Positioning System, is the only system today able to show you your exact position on the Earth anytime,
2 INTRODUCTION TO GNSS REFLECTOMERY
 2 INTRODUCTION TO GNSS REFLECTOMERY 2.1 Introduction The use of Global Navigation Satellite Systems (GNSS) signals reflected by the sea surface for altimetry applications was first suggested by Martín-Neira
2 INTRODUCTION TO GNSS REFLECTOMERY 2.1 Introduction The use of Global Navigation Satellite Systems (GNSS) signals reflected by the sea surface for altimetry applications was first suggested by Martín-Neira
CHAPTER 2 GPS GEODESY. Estelar. The science of geodesy is concerned with the earth by quantitatively
 CHAPTER 2 GPS GEODESY 2.1. INTRODUCTION The science of geodesy is concerned with the earth by quantitatively describing the coordinates of each point on the surface in a global or local coordinate system.
CHAPTER 2 GPS GEODESY 2.1. INTRODUCTION The science of geodesy is concerned with the earth by quantitatively describing the coordinates of each point on the surface in a global or local coordinate system.
GPS Global Positioning System
 GPS Global Positioning System 10.04.2012 1 Agenda What is GPS? Basic consept History GPS receivers How they work Comunication Message format Satellite frequencies Sources of GPS signal errors 10.04.2012
GPS Global Positioning System 10.04.2012 1 Agenda What is GPS? Basic consept History GPS receivers How they work Comunication Message format Satellite frequencies Sources of GPS signal errors 10.04.2012
GPS: The Basics. Darrell R. Dean, Jr. Civil and Environmental Engineering West Virginia University. Expected Learning Outcomes for GPS
 GPS: The Basics Darrell R. Dean, Jr. Civil and Environmental Engineering West Virginia University Expected Learning Outcomes for GPS Explain the acronym GPS Name 3 important tdt dates in history of GPS
GPS: The Basics Darrell R. Dean, Jr. Civil and Environmental Engineering West Virginia University Expected Learning Outcomes for GPS Explain the acronym GPS Name 3 important tdt dates in history of GPS
TEST YOUR SATELLITE NAVIGATION PERFORMANCE ON YOUR ANDROID DEVICE GLOSSARY
 TEST YOUR SATELLITE NAVIGATION PERFORMANCE ON YOUR ANDROID DEVICE GLOSSARY THE GLOSSARY This glossary aims to clarify and explain the acronyms used in GNSS and satellite navigation performance testing
TEST YOUR SATELLITE NAVIGATION PERFORMANCE ON YOUR ANDROID DEVICE GLOSSARY THE GLOSSARY This glossary aims to clarify and explain the acronyms used in GNSS and satellite navigation performance testing
Proceedings of Al-Azhar Engineering 7 th International Conference Cairo, April 7-10, 2003.
 Proceedings of Al-Azhar Engineering 7 th International Conference Cairo, April 7-10, 2003. MODERNIZATION PLAN OF GPS IN 21 st CENTURY AND ITS IMPACTS ON SURVEYING APPLICATIONS G. M. Dawod Survey Research
Proceedings of Al-Azhar Engineering 7 th International Conference Cairo, April 7-10, 2003. MODERNIZATION PLAN OF GPS IN 21 st CENTURY AND ITS IMPACTS ON SURVEYING APPLICATIONS G. M. Dawod Survey Research
GLOBAL NAVIGATION SATELLITE SYSTEMS (GNSS) ECE 2526E Tuesday, 24 April 2018
 ECE 2526E Tuesday, 24 April 2018") GLOBAL NAVIGATION SATELLITE SYSTEMS (GNSS) ECE 2526E Tuesday, 24 April 2018 MAJOR GLOBAL NAVIGATION SATELLITE SYSTEMS (GNSS) Global Navigation Satellite System (GNSS) includes: 1. Global Position System
GLOBAL NAVIGATION SATELLITE SYSTEMS (GNSS) ECE 2526E Tuesday, 24 April 2018 MAJOR GLOBAL NAVIGATION SATELLITE SYSTEMS (GNSS) Global Navigation Satellite System (GNSS) includes: 1. Global Position System
The GLOBAL POSITIONING SYSTEM James R. Clynch February 2006
 The GLOBAL POSITIONING SYSTEM James R. Clynch February 2006 I. Introduction What is GPS The Global Positioning System, or GPS, is a satellite based navigation system developed by the United States Defense
The GLOBAL POSITIONING SYSTEM James R. Clynch February 2006 I. Introduction What is GPS The Global Positioning System, or GPS, is a satellite based navigation system developed by the United States Defense
ESTIMATION OF IONOSPHERIC DELAY FOR SINGLE AND DUAL FREQUENCY GPS RECEIVERS: A COMPARISON
 ESTMATON OF ONOSPHERC DELAY FOR SNGLE AND DUAL FREQUENCY GPS RECEVERS: A COMPARSON K. Durga Rao, Dr. V B S Srilatha ndira Dutt Dept. of ECE, GTAM UNVERSTY Abstract: Global Positioning System is the emerging
ESTMATON OF ONOSPHERC DELAY FOR SNGLE AND DUAL FREQUENCY GPS RECEVERS: A COMPARSON K. Durga Rao, Dr. V B S Srilatha ndira Dutt Dept. of ECE, GTAM UNVERSTY Abstract: Global Positioning System is the emerging
Precise Positioning with NovAtel CORRECT Including Performance Analysis
 Precise Positioning with NovAtel CORRECT Including Performance Analysis NovAtel White Paper April 2015 Overview This article provides an overview of the challenges and techniques of precise GNSS positioning.
Precise Positioning with NovAtel CORRECT Including Performance Analysis NovAtel White Paper April 2015 Overview This article provides an overview of the challenges and techniques of precise GNSS positioning.
The last 25 years - GPS to multi-gnss: from a military tool to the most widely used civilian positioning solution
 1 The last 25 years - GPS to multi-gnss: from a military tool to the most widely used civilian positioning solution B. Hofmann-Wellenhof Institute of Geodesy / Navigation, Graz University of Technology
1 The last 25 years - GPS to multi-gnss: from a military tool to the most widely used civilian positioning solution B. Hofmann-Wellenhof Institute of Geodesy / Navigation, Graz University of Technology
Effect of Quasi Zenith Satellite (QZS) on GPS Positioning
 on GPS Positioning") Effect of Quasi Zenith Satellite (QZS) on GPS ing Tomoji Takasu 1, Takuji Ebinuma 2, and Akio Yasuda 3 Laboratory of Satellite Navigation, Tokyo University of Marine Science and Technology 1 (Tel: +81-5245-7365,
Effect of Quasi Zenith Satellite (QZS) on GPS ing Tomoji Takasu 1, Takuji Ebinuma 2, and Akio Yasuda 3 Laboratory of Satellite Navigation, Tokyo University of Marine Science and Technology 1 (Tel: +81-5245-7365,
GPS for. Land Surveyors. Jan Van Sickle. Fourth Edition. CRC Press. Taylor & Francis Group. Taylor & Francis Croup, an Informa business
 GPS for Land Surveyors Fourth Edition Jan Van Sickle CRC Press Taylor & Francis Group Boca Raton London New York CRC Press is an imprint of the Taylor & Francis Croup, an Informa business Contents Preface
GPS for Land Surveyors Fourth Edition Jan Van Sickle CRC Press Taylor & Francis Group Boca Raton London New York CRC Press is an imprint of the Taylor & Francis Croup, an Informa business Contents Preface
Wednesday AM: (Doug) 2. PS and Long Period Signals
 2. PS and Long Period Signals") Wednesday AM: (Doug) 2 PS and Long Period Signals What is Colorado famous for? 32 satellites 12 Early on in the world of science synchronization of clocks was found to be important. consider Paris: puffs
Wednesday AM: (Doug) 2 PS and Long Period Signals What is Colorado famous for? 32 satellites 12 Early on in the world of science synchronization of clocks was found to be important. consider Paris: puffs
PDHonline Course L105 (12 PDH) GPS Surveying. Instructor: Jan Van Sickle, P.L.S. PDH Online PDH Center
 GPS Surveying. Instructor: Jan Van Sickle, P.L.S. PDH Online PDH Center") PDHonline Course L105 (12 PDH) GPS Surveying Instructor: Jan Van Sickle, P.L.S. 2012 PDH Online PDH Center 5272 Meadow Estates Drive Fairfax, VA 22030-6658 Phone & Fax: 703-988-0088 www.pdhonline.org www.pdhcenter.com
PDHonline Course L105 (12 PDH) GPS Surveying Instructor: Jan Van Sickle, P.L.S. 2012 PDH Online PDH Center 5272 Meadow Estates Drive Fairfax, VA 22030-6658 Phone & Fax: 703-988-0088 www.pdhonline.org www.pdhcenter.com
GPS Glossary Written by Carl Carter SiRF Technology 2005
 GPS Glossary Written by Carl Carter SiRF Technology 2005 This glossary provides supplementary information for students of GPS Fundamentals. While many of the terms can have other definitions from those
GPS Glossary Written by Carl Carter SiRF Technology 2005 This glossary provides supplementary information for students of GPS Fundamentals. While many of the terms can have other definitions from those
Basics of Satellite Navigation an Elementary Introduction Prof. Dr. Bernhard Hofmann-Wellenhof Graz, University of Technology, Austria
 Basics of Satellite Navigation an Elementary Introduction Prof. Dr. Bernhard Hofmann-Wellenhof Graz, University of Technology, Austria CONCEPT OF GPS Prof. Dr. Bernhard Hofmann-Wellenhof Graz, University
Basics of Satellite Navigation an Elementary Introduction Prof. Dr. Bernhard Hofmann-Wellenhof Graz, University of Technology, Austria CONCEPT OF GPS Prof. Dr. Bernhard Hofmann-Wellenhof Graz, University
Table of Contents. Frequently Used Abbreviation... xvii
 GPS Satellite Surveying, 2 nd Edition Alfred Leick Department of Surveying Engineering, University of Maine John Wiley & Sons, Inc. 1995 (Navtech order #1028) Table of Contents Preface... xiii Frequently
GPS Satellite Surveying, 2 nd Edition Alfred Leick Department of Surveying Engineering, University of Maine John Wiley & Sons, Inc. 1995 (Navtech order #1028) Table of Contents Preface... xiii Frequently
GPS (Introduction) References. Terms
 References. Terms") GPS (Introduction) WCOM2, GPS, 1 Terms NAVSTAR GPS ( Navigational Satellite Timing and Ranging - Global Positioning System) is a GNSS (Global Navigation Satellite System), developed by the US-DoD in 197x
GPS (Introduction) WCOM2, GPS, 1 Terms NAVSTAR GPS ( Navigational Satellite Timing and Ranging - Global Positioning System) is a GNSS (Global Navigation Satellite System), developed by the US-DoD in 197x
GNSS: orbits, signals, and methods
 Part I GNSS: orbits, signals, and methods 1 GNSS ground and space segments Global Navigation Satellite Systems (GNSS) at the time of writing comprise four systems, two of which are fully operational and
Part I GNSS: orbits, signals, and methods 1 GNSS ground and space segments Global Navigation Satellite Systems (GNSS) at the time of writing comprise four systems, two of which are fully operational and
Global Positioning Systems (GPS) Trails: the achilles heel of mapping from the air / satellites
 Trails: the achilles heel of mapping from the air / satellites") Global Positioning Systems (GPS) Trails: the achilles heel of mapping from the air / satellites Google maps updated regularly by local users using GPS Also: http://openstreetmaps.org GPS applications
Global Positioning Systems (GPS) Trails: the achilles heel of mapping from the air / satellites Google maps updated regularly by local users using GPS Also: http://openstreetmaps.org GPS applications
Problem Areas of DGPS
 DYNAMIC POSITIONING CONFERENCE October 13 14, 1998 SENSORS Problem Areas of DGPS R. H. Prothero & G. McKenzie Racal NCS Inc. (Houston) Table of Contents 1.0 ABSTRACT... 2 2.0 A TYPICAL DGPS CONFIGURATION...
DYNAMIC POSITIONING CONFERENCE October 13 14, 1998 SENSORS Problem Areas of DGPS R. H. Prothero & G. McKenzie Racal NCS Inc. (Houston) Table of Contents 1.0 ABSTRACT... 2 2.0 A TYPICAL DGPS CONFIGURATION...
Trimble Business Center:
 Trimble Business Center: Modernized Approaches for GNSS Baseline Processing Trimble s industry-leading software includes a new dedicated processor for static baselines. The software features dynamic selection
Trimble Business Center: Modernized Approaches for GNSS Baseline Processing Trimble s industry-leading software includes a new dedicated processor for static baselines. The software features dynamic selection
Challenges and Solutions for GPS Receiver Test
 Challenges and Solutions for GPS Receiver Test Presenter: Mirin Lew January 28, 2010 Agenda GPS technology concepts GPS and GNSS overview Assisted GPS (A-GPS) Basic tests required for GPS receiver verification
Challenges and Solutions for GPS Receiver Test Presenter: Mirin Lew January 28, 2010 Agenda GPS technology concepts GPS and GNSS overview Assisted GPS (A-GPS) Basic tests required for GPS receiver verification
GNSS & Coordinate Systems
 GNSS & Coordinate Systems Matthew McAdam, Marcelo Santos University of New Brunswick, Department of Geodesy and Geomatics Engineering, Fredericton, NB May 29, 2012 Santos, 2004 msantos@unb.ca 1 GNSS GNSS
GNSS & Coordinate Systems Matthew McAdam, Marcelo Santos University of New Brunswick, Department of Geodesy and Geomatics Engineering, Fredericton, NB May 29, 2012 Santos, 2004 msantos@unb.ca 1 GNSS GNSS
GPS (Introduction) References. Terms
 References. Terms") GPS (Introduction) MSE, Rumc, GPS, 1 Terms NAVSTAR GPS ( Navigational Satellite Timing and Ranging - Global Positioning System) is a GNSS (Global Navigation Satellite System), developed by the US-DoD in
GPS (Introduction) MSE, Rumc, GPS, 1 Terms NAVSTAR GPS ( Navigational Satellite Timing and Ranging - Global Positioning System) is a GNSS (Global Navigation Satellite System), developed by the US-DoD in
3. Radio Occultation Principles
 Page 1 of 6 [Up] [Previous] [Next] [Home] 3. Radio Occultation Principles The radio occultation technique was first developed at the Stanford University Center for Radar Astronomy (SUCRA) for studies of
Page 1 of 6 [Up] [Previous] [Next] [Home] 3. Radio Occultation Principles The radio occultation technique was first developed at the Stanford University Center for Radar Astronomy (SUCRA) for studies of
Errors in GPS. Errors in GPS. Geodetic Co-ordinate system. R. Khosla Fall Semester
 Errors in GPS Errors in GPS GPS is currently the most accurate positioning system available globally. Although we are talking about extreme precision and measuring distances by speed of light, yet there
Errors in GPS Errors in GPS GPS is currently the most accurate positioning system available globally. Although we are talking about extreme precision and measuring distances by speed of light, yet there
Global Positioning Systems -GPS
 Global Positioning Systems -GPS GPS Why? What is it? How does it work? Differential GPS How can it help me? GPS Why?? Where am I? How do I get there? Where are you, and how do I get to You? WHO CARES???
Global Positioning Systems -GPS GPS Why? What is it? How does it work? Differential GPS How can it help me? GPS Why?? Where am I? How do I get there? Where are you, and how do I get to You? WHO CARES???
Principal Investigator Co-Principal Investigator Co-Principal Investigator Prof. Talat Ahmad Vice-Chancellor Jamia Millia Islamia Delhi
 Subject Paper No and Title Module No and Title Module Tag Geology Remote Sensing and GIS Concepts of Global Navigation Satellite RS & GIS XXXIII Principal Investigator Co-Principal Investigator Co-Principal
Subject Paper No and Title Module No and Title Module Tag Geology Remote Sensing and GIS Concepts of Global Navigation Satellite RS & GIS XXXIII Principal Investigator Co-Principal Investigator Co-Principal
Global Positioning Systems - GPS
 Global Positioning Systems - GPS GPS Why? What is it? How does it work? Differential GPS How can it help me? GPS Why?? Where am I? How do I get there? Where are you, and how do I get to You? WHO CARES???
Global Positioning Systems - GPS GPS Why? What is it? How does it work? Differential GPS How can it help me? GPS Why?? Where am I? How do I get there? Where are you, and how do I get to You? WHO CARES???
GNSS Surveying & Processing (A Surveyors Peek Behind the Curtain) Presented by Jeff Clark, PLS
 Presented by Jeff Clark, PLS") GNSS Surveying & Processing (A Surveyors Peek Behind the Curtain) Presented by Jeff Clark, PLS Global Positioning System (GPS) (GNSS) GPS is considered a passive system Passive in the sense that only the
GNSS Surveying & Processing (A Surveyors Peek Behind the Curtain) Presented by Jeff Clark, PLS Global Positioning System (GPS) (GNSS) GPS is considered a passive system Passive in the sense that only the
Global Navigation Satellite Systems (GNSS)Part I EE 570: Location and Navigation
Part I EE 570: Location and Navigation") Lecture Global Navigation Satellite Systems (GNSS)Part I EE 570: Location and Navigation Lecture Notes Update on April 25, 2016 Aly El-Osery and Kevin Wedeward, Electrical Engineering Dept., New Mexico
Lecture Global Navigation Satellite Systems (GNSS)Part I EE 570: Location and Navigation Lecture Notes Update on April 25, 2016 Aly El-Osery and Kevin Wedeward, Electrical Engineering Dept., New Mexico
2. GPS and GLONASS Basic Facts
 2. GPS and GLONASS Basic Facts In 1973 the U.S. Department of Defense decided to establish, develop, test, acquire, and deploy a spaceborne Global Positioning System (GPS). The result of this decision
2. GPS and GLONASS Basic Facts In 1973 the U.S. Department of Defense decided to establish, develop, test, acquire, and deploy a spaceborne Global Positioning System (GPS). The result of this decision
King AbdulAziz University. Faculty of Environmental Design. Geomatics Department. Mobile GIS GEOM 427. Lecture 3
 King AbdulAziz University Faculty of Environmental Design Geomatics Department Mobile GIS GEOM 427 Lecture 3 Ahmed Baik, Ph.D. Email: abaik@kau.edu.sa Eng. Fisal Basheeh Email: fbasaheeh@kau.edu.sa GNSS
King AbdulAziz University Faculty of Environmental Design Geomatics Department Mobile GIS GEOM 427 Lecture 3 Ahmed Baik, Ph.D. Email: abaik@kau.edu.sa Eng. Fisal Basheeh Email: fbasaheeh@kau.edu.sa GNSS
The Global Positioning System
 The Global Positioning System Principles of GPS positioning GPS signal and observables Errors and corrections Processing GPS data GPS measurement strategies Precision and accuracy E. Calais Purdue University
The Global Positioning System Principles of GPS positioning GPS signal and observables Errors and corrections Processing GPS data GPS measurement strategies Precision and accuracy E. Calais Purdue University
GNSS Signal Structures
 GNSS Signal Structures Tom Stansell Stansell Consulting Tom@Stansell.com Bangkok, Thailand 23 January 2018 S t a n s e l l C o n s u l t i n g RL Introduction It s a pleasure to speak with you this morning.
GNSS Signal Structures Tom Stansell Stansell Consulting Tom@Stansell.com Bangkok, Thailand 23 January 2018 S t a n s e l l C o n s u l t i n g RL Introduction It s a pleasure to speak with you this morning.
Foreword by Glen Gibbons About this book Acknowledgments List of abbreviations and acronyms List of definitions
 Table of Foreword by Glen Gibbons About this book Acknowledgments List of abbreviations and acronyms List of definitions page xiii xix xx xxi xxv Part I GNSS: orbits, signals, and methods 1 GNSS ground
Table of Foreword by Glen Gibbons About this book Acknowledgments List of abbreviations and acronyms List of definitions page xiii xix xx xxi xxv Part I GNSS: orbits, signals, and methods 1 GNSS ground
Fundamentals of GPS for high-precision geodesy
 Fundamentals of GPS for high-precision geodesy T. A. Herring M. A. Floyd R. W. King Massachusetts Institute of Technology, Cambridge, MA, USA UNAVCO Headquarters, Boulder, Colorado, USA 19 23 June 2017
Fundamentals of GPS for high-precision geodesy T. A. Herring M. A. Floyd R. W. King Massachusetts Institute of Technology, Cambridge, MA, USA UNAVCO Headquarters, Boulder, Colorado, USA 19 23 June 2017
CARRIER PHASE VS. CODE PHASE
 DIFFERENTIAL CORRECTION Code phase processing- GPS measurements based on the pseudo random code (C/A or P) as opposed to the carrier of that code. (1-5 meter accuracy) Carrier phase processing- GPS measurements
DIFFERENTIAL CORRECTION Code phase processing- GPS measurements based on the pseudo random code (C/A or P) as opposed to the carrier of that code. (1-5 meter accuracy) Carrier phase processing- GPS measurements
Orbit Determination for CE5T Based upon GPS Data
 Orbit Determination for CE5T Based upon GPS Data Cao Jianfeng (1), Tang Geshi (2), Hu Songjie (3), ZhangYu (4), and Liu Lei (5) (1) Beijing Aerospace Control Center, 26 Beiqing Road, Haidian Disrtrict,
Orbit Determination for CE5T Based upon GPS Data Cao Jianfeng (1), Tang Geshi (2), Hu Songjie (3), ZhangYu (4), and Liu Lei (5) (1) Beijing Aerospace Control Center, 26 Beiqing Road, Haidian Disrtrict,
PDHonline Course L105 (12 PDH) GPS Surveying. Instructor: Jan Van Sickle, P.L.S. PDH Online PDH Center
 GPS Surveying. Instructor: Jan Van Sickle, P.L.S. PDH Online PDH Center") PDHonline Course L105 (12 PDH) GPS Surveying Instructor: Jan Van Sickle, P.L.S. 2012 PDH Online PDH Center 5272 Meadow Estates Drive Fairfax, VA 22030-6658 Phone & Fax: 703-988-0088 www.pdhonline.org www.pdhcenter.com
PDHonline Course L105 (12 PDH) GPS Surveying Instructor: Jan Van Sickle, P.L.S. 2012 PDH Online PDH Center 5272 Meadow Estates Drive Fairfax, VA 22030-6658 Phone & Fax: 703-988-0088 www.pdhonline.org www.pdhcenter.com
What is GPS? GPS Position Accuracy. GPS Applications. What is a GPS. How does GPS work? GPS Segments
 What is GPS? What is a GPS How does GPS work? GPS Segments GPS Position Accuracy GPS Applications 1 What is GPS? The Global Positioning System (GPS) is a precise worldwide radio-navigation system, and
What is GPS? What is a GPS How does GPS work? GPS Segments GPS Position Accuracy GPS Applications 1 What is GPS? The Global Positioning System (GPS) is a precise worldwide radio-navigation system, and
Radar Probabilistic Data Association Filter with GPS Aiding for Target Selection and Relative Position Determination. Tyler P.
 Radar Probabilistic Data Association Filter with GPS Aiding for Target Selection and Relative Position Determination by Tyler P. Sherer A thesis submitted to the Graduate Faculty of Auburn University in
Radar Probabilistic Data Association Filter with GPS Aiding for Target Selection and Relative Position Determination by Tyler P. Sherer A thesis submitted to the Graduate Faculty of Auburn University in
An Introduction to GPS
 An Introduction to GPS You are here The GPS system: what is GPS Principles of GPS: how does it work Processing of GPS: getting precise results Yellowstone deformation: an example What is GPS? System to
An Introduction to GPS You are here The GPS system: what is GPS Principles of GPS: how does it work Processing of GPS: getting precise results Yellowstone deformation: an example What is GPS? System to
Data acquisition and integration 3.
 University of West Hungary, Faculty of Geoinformatics Bányai László Data acquisition and integration 3. module DAI3 Global Navigation Satellite System SZÉKESFEHÉRVÁR 2010 The right to this intellectual
University of West Hungary, Faculty of Geoinformatics Bányai László Data acquisition and integration 3. module DAI3 Global Navigation Satellite System SZÉKESFEHÉRVÁR 2010 The right to this intellectual
GPS STATIC-PPP POSITIONING ACCURACY VARIATION WITH OBSERVATION RECORDING INTERVAL FOR HYDROGRAPHIC APPLICATIONS (ASWAN, EGYPT)
") GPS STATIC-PPP POSITIONING ACCURACY VARIATION WITH OBSERVATION RECORDING INTERVAL FOR HYDROGRAPHIC APPLICATIONS (ASWAN, EGYPT) Ashraf Farah Associate Professor,College of Engineering, Aswan University,
GPS STATIC-PPP POSITIONING ACCURACY VARIATION WITH OBSERVATION RECORDING INTERVAL FOR HYDROGRAPHIC APPLICATIONS (ASWAN, EGYPT) Ashraf Farah Associate Professor,College of Engineering, Aswan University,
Introduction to the Global Positioning System
 GPS for Fire Management - 2004 Introduction to the Global Positioning System Pre-Work Pre-Work Objectives Describe at least three sources of GPS signal error, and identify ways to mitigate or reduce those
GPS for Fire Management - 2004 Introduction to the Global Positioning System Pre-Work Pre-Work Objectives Describe at least three sources of GPS signal error, and identify ways to mitigate or reduce those
GPS POSITIONING GUIDE
 GPS POSITIONING GUIDE (July 1993) Third printing July 1995 This product is available from: Natural Resources Canada* Geomatics Canada Geodetic Survey Division Information Services 615 Booth Street Ottawa,
GPS POSITIONING GUIDE (July 1993) Third printing July 1995 This product is available from: Natural Resources Canada* Geomatics Canada Geodetic Survey Division Information Services 615 Booth Street Ottawa,
Integration of GPS with a Rubidium Clock and a Barometer for Land Vehicle Navigation
 Integration of GPS with a Rubidium Clock and a Barometer for Land Vehicle Navigation Zhaonian Zhang, Department of Geomatics Engineering, The University of Calgary BIOGRAPHY Zhaonian Zhang is a MSc student
Integration of GPS with a Rubidium Clock and a Barometer for Land Vehicle Navigation Zhaonian Zhang, Department of Geomatics Engineering, The University of Calgary BIOGRAPHY Zhaonian Zhang is a MSc student
GLOBAL POSITIONING SYSTEMS
 GLOBAL POSITIONING SYSTEMS GPS & GIS Fall 2017 Global Positioning Systems GPS is a general term for the navigation system consisting of 24-32 satellites orbiting the Earth, broadcasting data that allows
GLOBAL POSITIONING SYSTEMS GPS & GIS Fall 2017 Global Positioning Systems GPS is a general term for the navigation system consisting of 24-32 satellites orbiting the Earth, broadcasting data that allows
Primer on GPS Operations
 MP Rugged Wireless Modem Primer on GPS Operations 2130313 Rev 1.0 Cover illustration by Emma Jantz-Lee (age 11). An Introduction to GPS This primer is intended to provide the foundation for understanding
MP Rugged Wireless Modem Primer on GPS Operations 2130313 Rev 1.0 Cover illustration by Emma Jantz-Lee (age 11). An Introduction to GPS This primer is intended to provide the foundation for understanding
EE 570: Location and Navigation
 EE 570: Location and Navigation Global Navigation Satellite Systems (GNSS) Part I Aly El-Osery Kevin Wedeward Electrical Engineering Department, New Mexico Tech Socorro, New Mexico, USA In Collaboration
EE 570: Location and Navigation Global Navigation Satellite Systems (GNSS) Part I Aly El-Osery Kevin Wedeward Electrical Engineering Department, New Mexico Tech Socorro, New Mexico, USA In Collaboration
Global Correction Services for GNSS
 Global Correction Services for GNSS Hemisphere GNSS Whitepaper September 5, 2015 Overview Since the early days of GPS, new industries emerged while existing industries evolved to use position data in real-time.
Global Correction Services for GNSS Hemisphere GNSS Whitepaper September 5, 2015 Overview Since the early days of GPS, new industries emerged while existing industries evolved to use position data in real-time.
Monitoring the Ionosphere and Neutral Atmosphere with GPS
 Monitoring the Ionosphere and Neutral Atmosphere with GPS Richard B. Langley Geodetic Research Laboratory Department of Geodesy and Geomatics Engineering University of New Brunswick Fredericton, N.B. Division
Monitoring the Ionosphere and Neutral Atmosphere with GPS Richard B. Langley Geodetic Research Laboratory Department of Geodesy and Geomatics Engineering University of New Brunswick Fredericton, N.B. Division
Introduction to Geographic Information Science. Last Lecture. Today s Outline. Geography 4103 / GNSS/GPS Technology
 Geography 4103 / 5103 Introduction to Geographic Information Science GNSS/GPS Technology Last Lecture Geoids Ellipsoid Datum Projection Basics Today s Outline GNSS technology How satellite based navigation
Geography 4103 / 5103 Introduction to Geographic Information Science GNSS/GPS Technology Last Lecture Geoids Ellipsoid Datum Projection Basics Today s Outline GNSS technology How satellite based navigation
Asian Journal of Science and Technology Vol. 08, Issue, 11, pp , November, 2017 RESEARCH ARTICLE
 Available Online at http://www.journalajst.com ASIAN JOURNAL OF SCIENCE AND TECHNOLOGY ISSN: 0976-3376 Asian Journal of Science and Technology Vol. 08, Issue, 11, pp.6697-6703, November, 2017 ARTICLE INFO
Available Online at http://www.journalajst.com ASIAN JOURNAL OF SCIENCE AND TECHNOLOGY ISSN: 0976-3376 Asian Journal of Science and Technology Vol. 08, Issue, 11, pp.6697-6703, November, 2017 ARTICLE INFO
RADIOMETRIC TRACKING. Space Navigation
 RADIOMETRIC TRACKING Space Navigation Space Navigation Elements SC orbit determination Knowledge and prediction of SC position & velocity SC flight path control Firing the attitude control thrusters to
RADIOMETRIC TRACKING Space Navigation Space Navigation Elements SC orbit determination Knowledge and prediction of SC position & velocity SC flight path control Firing the attitude control thrusters to
E. Calais Purdue University - EAS Department Civil 3273
 E. Calais Purdue University - EAS Department Civil 373 ecalais@purdue.edu GPS signal propagation GPS signal (= carrier phase modulated by satellite PRN code) sent by satellite. About 66 msec (0,000 km)
E. Calais Purdue University - EAS Department Civil 373 ecalais@purdue.edu GPS signal propagation GPS signal (= carrier phase modulated by satellite PRN code) sent by satellite. About 66 msec (0,000 km)
GPS Errors. Figure 1. Four satellites are required to determine a GPS position.
 Expl ai ni nggps:thegl obalposi t i oni ngsyst em since a minimum of four satellites is required to calculate a position (Fig 1). However, many newer GPS receivers are equipped to receive up to 12 satellite
Expl ai ni nggps:thegl obalposi t i oni ngsyst em since a minimum of four satellites is required to calculate a position (Fig 1). However, many newer GPS receivers are equipped to receive up to 12 satellite
Introduction to GNSS
 Introduction to GNSS Dimitrios Bolkas, Ph.D. Department of Surveying Engineering, Pennsylvania State University, Wilkes Barre Campus PSLS Surveyor s Conference Hershey, PA Global Navigation Satellite System
Introduction to GNSS Dimitrios Bolkas, Ph.D. Department of Surveying Engineering, Pennsylvania State University, Wilkes Barre Campus PSLS Surveyor s Conference Hershey, PA Global Navigation Satellite System
GNSS 101 Bringing It Down To Earth
 GNSS 101 Bringing It Down To Earth Steve Richter Frontier Precision, Inc. UTM County Coordinates NGVD 29 State Plane Datums Scale Factors Projections Session Agenda GNSS History & Basic Theory Coordinate
GNSS 101 Bringing It Down To Earth Steve Richter Frontier Precision, Inc. UTM County Coordinates NGVD 29 State Plane Datums Scale Factors Projections Session Agenda GNSS History & Basic Theory Coordinate
Introduction to GNSS
 Introduction to GNSS Dimitrios Bolkas, Ph.D. Department of Surveying Engineering, Pennsylvania State University, Wilkes Barre Campus PSLS Surveyor s Conference January 21-24, 2018 Hershey, PA Global Navigation
Introduction to GNSS Dimitrios Bolkas, Ph.D. Department of Surveying Engineering, Pennsylvania State University, Wilkes Barre Campus PSLS Surveyor s Conference January 21-24, 2018 Hershey, PA Global Navigation
The Benefits of Three Frequencies for the High Accuracy Positioning
 The Benefits of Three Frequencies for the High Accuracy Positioning Nobuaki Kubo (Tokyo University of Marine and Science Technology) Akio Yasuda (Tokyo University of Marine and Science Technology) Isao
The Benefits of Three Frequencies for the High Accuracy Positioning Nobuaki Kubo (Tokyo University of Marine and Science Technology) Akio Yasuda (Tokyo University of Marine and Science Technology) Isao
CHAPTER 22 SATELLITE NAVIGATION
 CHAPTER 22 SATELLITE NAVIGATION INTRODUCTION 2200. Development The idea that led to development of the satellite navigation systems dates back to 1957 and the first launch of an artificial satellite into
CHAPTER 22 SATELLITE NAVIGATION INTRODUCTION 2200. Development The idea that led to development of the satellite navigation systems dates back to 1957 and the first launch of an artificial satellite into
GPS the Interdisciplinary Chameleon: How Does it do That?
 GPS the Interdisciplinary Chameleon: How Does it do That? Geoff Blewitt Nevada Bureau of Mines and Geology & Seismological Laboratory University of Nevada, Reno, USA Cool Science using GPS Application
GPS the Interdisciplinary Chameleon: How Does it do That? Geoff Blewitt Nevada Bureau of Mines and Geology & Seismological Laboratory University of Nevada, Reno, USA Cool Science using GPS Application
Satellite Navigation Science and Technology for Africa. 23 March - 9 April, Satellite Navigation
 2025-45 Satellite Navigation Science and Technology for Africa 23 March - 9 April, 2009 Satellite Navigation MISRA Pratap The MITRE Corporation 202 Burlington Rd. / Rte 62 Bedford MA 01730-1420 U.S.A.
2025-45 Satellite Navigation Science and Technology for Africa 23 March - 9 April, 2009 Satellite Navigation MISRA Pratap The MITRE Corporation 202 Burlington Rd. / Rte 62 Bedford MA 01730-1420 U.S.A.
APPENDIX GPS TERMINOLOGY
 APPENDIX GPS TERMINOLOGY Almanac Data transmitted by a GPS satellite which includes orbital information on all the satellites, clock correction, and atmospheric delay parameters. These data are used to
APPENDIX GPS TERMINOLOGY Almanac Data transmitted by a GPS satellite which includes orbital information on all the satellites, clock correction, and atmospheric delay parameters. These data are used to
Introduction to the Global Positioning System
 GPS for ICS - 2003 Introduction to the Global Positioning System Pre-Work Pre-Work Objectives Describe at least three sources of GPS signal error, and ways to mitigate or reduce those errors. Identify
GPS for ICS - 2003 Introduction to the Global Positioning System Pre-Work Pre-Work Objectives Describe at least three sources of GPS signal error, and ways to mitigate or reduce those errors. Identify
GNSS Modernisation and Its Effect on Surveying
 Lawrence LAU and Gethin ROBERTS, China/UK Key words: GNSS Modernisation, Multipath Effect SUMMARY GPS and GLONASS modernisation is being undertaken. The current GPS modernisation plan is expected to be
Lawrence LAU and Gethin ROBERTS, China/UK Key words: GNSS Modernisation, Multipath Effect SUMMARY GPS and GLONASS modernisation is being undertaken. The current GPS modernisation plan is expected to be
RADIOMETRIC TRACKING. Space Navigation
 RADIOMETRIC TRACKING Space Navigation October 24, 2016 D. Kanipe Space Navigation Elements SC orbit determination Knowledge and prediction of SC position & velocity SC flight path control Firing the attitude
RADIOMETRIC TRACKING Space Navigation October 24, 2016 D. Kanipe Space Navigation Elements SC orbit determination Knowledge and prediction of SC position & velocity SC flight path control Firing the attitude
GPS Tutorial Trimble Home > GPS Tutorial > How GPS works? > Triangulating
 http://www.trimble.com/gps/howgps-triangulating.shtml Page 1 of 3 Trimble Worldwide Popula PRODUCTS & SOLUTIONS SUPPORT & TRAINING ABOUT TRIMBLE INVESTORS GPS Tutorial Trimble Home > GPS Tutorial > How
http://www.trimble.com/gps/howgps-triangulating.shtml Page 1 of 3 Trimble Worldwide Popula PRODUCTS & SOLUTIONS SUPPORT & TRAINING ABOUT TRIMBLE INVESTORS GPS Tutorial Trimble Home > GPS Tutorial > How
Using GPS in Embedded Applications Pascal Stang Stanford University - EE281 November 28, 2000
 Using GPS in Embedded Applications Pascal Stang Stanford University - EE281 INTRODUCTION Brief history of GPS Transit System NavStar (what we now call GPS) Started development in 1973 First four satellites
Using GPS in Embedded Applications Pascal Stang Stanford University - EE281 INTRODUCTION Brief history of GPS Transit System NavStar (what we now call GPS) Started development in 1973 First four satellites
RESOLUTION MSC.112(73) (adopted on 1 December 2000) ADOPTION OF THE REVISED PERFORMANCE STANDARDS FOR SHIPBORNE GLOBAL POSITIONING SYSTEM (GPS)
 (adopted on 1 December 2000) ADOPTION OF THE REVISED PERFORMANCE STANDARDS FOR SHIPBORNE GLOBAL POSITIONING SYSTEM (GPS)") MSC 73/21/Add.3 RESOLUTION MSC.112(73) FOR SHIPBORNE GLOBAL POSITIONING SYSTEM THE MARITIME SAFETY COMMITTEE, RECALLING Article (28(b) of the Convention on the International Maritime Organization concerning
MSC 73/21/Add.3 RESOLUTION MSC.112(73) FOR SHIPBORNE GLOBAL POSITIONING SYSTEM THE MARITIME SAFETY COMMITTEE, RECALLING Article (28(b) of the Convention on the International Maritime Organization concerning
Multipath and Atmospheric Propagation Errors in Offshore Aviation DGPS Positioning
 Multipath and Atmospheric Propagation Errors in Offshore Aviation DGPS Positioning J. Paul Collins, Peter J. Stewart and Richard B. Langley 2nd Workshop on Offshore Aviation Research Centre for Cold Ocean
Multipath and Atmospheric Propagation Errors in Offshore Aviation DGPS Positioning J. Paul Collins, Peter J. Stewart and Richard B. Langley 2nd Workshop on Offshore Aviation Research Centre for Cold Ocean
MINOS Timing and GPS Precise Point Positioning
 MINOS Timing and GPS Precise Point Positioning Stephen Mitchell US Naval Observatory stephen.mitchell@usno.navy.mil for the International Workshop on Accelerator Alignment 2012 in Batavia, IL A Joint
MINOS Timing and GPS Precise Point Positioning Stephen Mitchell US Naval Observatory stephen.mitchell@usno.navy.mil for the International Workshop on Accelerator Alignment 2012 in Batavia, IL A Joint
Introduction. Global Positioning System. GPS - Intro. Space Segment. GPS - Intro. Space Segment - Contd..
 Introduction Global Positioning System Prof. D. Nagesh Kumar Dept. of Civil Engg., IISc, Bangalore 560 012, India URL: http://www.civil.iisc.ernet.in/~nagesh GPS is funded and controlled by U. S. Department
Introduction Global Positioning System Prof. D. Nagesh Kumar Dept. of Civil Engg., IISc, Bangalore 560 012, India URL: http://www.civil.iisc.ernet.in/~nagesh GPS is funded and controlled by U. S. Department
Understanding GPS: Principles and Applications Second Edition
 Understanding GPS: Principles and Applications Second Edition Elliott Kaplan and Christopher Hegarty ISBN 1-58053-894-0 Approx. 680 pages Navtech Part #1024 This thoroughly updated second edition of an
Understanding GPS: Principles and Applications Second Edition Elliott Kaplan and Christopher Hegarty ISBN 1-58053-894-0 Approx. 680 pages Navtech Part #1024 This thoroughly updated second edition of an
Perspective of Eastern Global Satellite Navigation Systems
 POSTER 2015, PRAGUE MAY 14 1 Perspective of Eastern Global Satellite Navigation Systems Jiří SVATOŇ Dept. of Radioengineering, Czech Technical University, Technická 2, 166 27 Praha, Czech Republic svatoji2@fel.cvut.cz
POSTER 2015, PRAGUE MAY 14 1 Perspective of Eastern Global Satellite Navigation Systems Jiří SVATOŇ Dept. of Radioengineering, Czech Technical University, Technická 2, 166 27 Praha, Czech Republic svatoji2@fel.cvut.cz
Broadcast Ionospheric Model Accuracy and the Effect of Neglecting Ionospheric Effects on C/A Code Measurements on a 500 km Baseline
 Broadcast Ionospheric Model Accuracy and the Effect of Neglecting Ionospheric Effects on C/A Code Measurements on a 500 km Baseline Intro By David MacDonald Waypoint Consulting May 2002 The ionosphere
Broadcast Ionospheric Model Accuracy and the Effect of Neglecting Ionospheric Effects on C/A Code Measurements on a 500 km Baseline Intro By David MacDonald Waypoint Consulting May 2002 The ionosphere
Tajul Ariffin Musa. Tajul A. Musa. Dept. of Geomatics Eng, FKSG, Universiti Teknologi Malaysia, Skudai, Johor, MALAYSIA.
 Tajul Ariffin Musa Dept. of Geomatics Eng, FKSG, Universiti Teknologi Malaysia, 81310 Skudai, Johor, MALAYSIA. Phone : +6075530830;+6075530883; Mobile : +60177294601 Fax : +6075566163 E-mail : tajul@fksg.utm.my
Tajul Ariffin Musa Dept. of Geomatics Eng, FKSG, Universiti Teknologi Malaysia, 81310 Skudai, Johor, MALAYSIA. Phone : +6075530830;+6075530883; Mobile : +60177294601 Fax : +6075566163 E-mail : tajul@fksg.utm.my
Global Positioning System (GPS) Positioning Errors During Ionospheric Scintillation Event. Keywords: GPS; scintillation; positioning error
 Positioning Errors During Ionospheric Scintillation Event. Keywords: GPS; scintillation; positioning error") Jurnal Teknologi Full paper Global Positioning System (GPS) Positioning Errors During Ionospheric Scintillation Event Y. H. Ho a*, S. Abdullah b, M. H. Mokhtar b a Faculty of Electronic and Computer Engineering,
Jurnal Teknologi Full paper Global Positioning System (GPS) Positioning Errors During Ionospheric Scintillation Event Y. H. Ho a*, S. Abdullah b, M. H. Mokhtar b a Faculty of Electronic and Computer Engineering,
Principles of the Global Positioning System Lecture 19
 12.540 Principles of the Global Positioning System Lecture 19 Prof. Thomas Herring http://geoweb.mit.edu/~tah/12.540 GPS Models and processing Summary: Finish up modeling aspects Rank deficiencies Processing
12.540 Principles of the Global Positioning System Lecture 19 Prof. Thomas Herring http://geoweb.mit.edu/~tah/12.540 GPS Models and processing Summary: Finish up modeling aspects Rank deficiencies Processing