New Structure for IGT Tracking Devices: Simple Integration in External Projects
|
|
|
- Bennett Melton
- 5 years ago
- Views:
Transcription
1 New Structure for IGT Tracking Devices: Simple Integration in External Projects Esther Wild and Alfred Franz Computer-assisted Interventions (DKFZ)


")

2 Intraoperative registration with colored fiducials Baumhauer et al. (2007) Navigation in der minimal-invasiven Prostatachirurgie, BVM E. Wild, slide 2



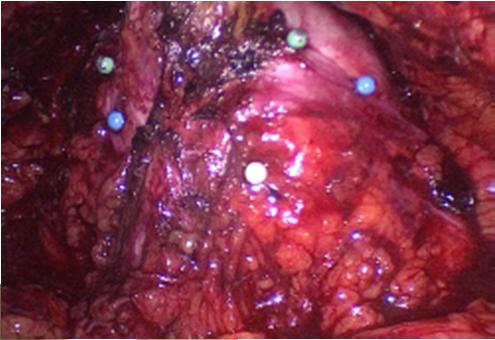
3 Intraoperative registration with fluorescent markers Wild et al. Robust augmented reality guidance with fluorescent markers in laparoscopic surgery. International Journal of Computer Assisted Radiology and Surgery, 2016 [in press] E. Wild, slide 3


 Augmented Reality Navigation For")
4 Intraoperative registration Record 3D position of marker Tracking Device: Polaris Spectra Detect 2D position in video frames Threshold image, contours, center Estimate 3D pose of laparoscope Inside Out Tracking Baumhauer et al. (2008) Soft Tissue Navigation for Laparoscopic Partial Nephrectomy; Müller (2013) Augmented Reality Navigation For Percutaneous Nephro. On Mobile Devices. E. Wild, slide 4
5 The Tracking Toolbox Live DEMO E. Wild, slide 5



6 Next Step: Da Vinci Robot Use API Information 2016 Intuitive Surgical, Inc. E. Wild, slide 6
7 Difficulties & Solution NDA: Code cannot be open source Implementation from an external project Availability in different modules and plugins MITK Tracking Toolbox Old version of IGT: New structure Dynamic integration at program start Access device at any time from everywhere E. Wild, slide 7
8 E. Wild, slide 8 How to integrate a new tracking device from an external project in MITK
9 Create a new module CmakeList.txt MITK_CREATE_MODULE(MitkIGTTrackingDeviceExample DEPENDS PUBLIC MitkIGTUI MitkQtWidgetsExt INCLUDE_DIRS device AUTOLOAD_WITH MitkCore ) add_subdirectory(autoload/mitkigttrackingdeviceexampledeviceregistry device) Files.cmake set(cpp_files device/mitkvirtualtrackingdevicembi.cpp device/mitkvirtualtrackingtoolmbi.cpp device/mitkvirtualtrackertypeinformationmbi.cpp device/qmitkvirtualtrackerwidgetmbi.cpp) set(ui_files device/qmitkvirtualtrackerwidgetmbicontrols.ui) set(moc_h_files device/qmitkvirtualtrackerwidgetmbi.h) E. Wild, slide 9
10 Tracking device class mitkvirtualtrackingdevicembi.cpp/.h class MitkIGTTrackingDeviceExample_EXPORT VirtualTrackingDeviceMBI: public TrackingDevice Open and close connection Get and add tools Start and stop tracking Track tools, e.g. set tool position E. Wild, slide 10
11 Tracking Tools mitkvirtualtrackingtoolmbi.cpp/.h class MitkIGTTrackingDeviceExample_EXPORT VirtualTrackingToolMBI : public InternalTrackingTool GetPosition() SetPosition() GetToolInformation() E. Wild, slide 11
12 Use it everywhere - microservices Microservice TrackingDeviceCollection Somewhere: Add new Tracking Device Get Tracking Device(s) New Tracking Device Class MITK Module or Plugin E. Wild, slide 12
13 Provide Meta Data mitkvirtualtrackertypeinformationmbi.cpp/.h class EXPORT VirtualTrackerTypeInformationMBI : public TrackingDeviceTypeInformation Constructor Set device name (unique identifier) Set device data (model and volume information) Static function for device name GetTrackingDeviceName(){ return "My New TrackingDevice";} Create tracking device source New pipeline Add tools E. Wild, slide 13
; Set parameter return")
14 Integrate to Tracking Toolbox QmitkVirtualTrackerWidgetMBI.cpp/.h /.ui Construct tracking device returnvalue = VirtualTrackingDeviceMBI::New(); Set parameter return static_cast<trackingdevice::pointer>(returnvalue); Initialize widget Clone function E. Wild, slide 14
15 Register Device us::modulecontext* context = us::getmodulecontext(); TrackingDeviceTypeCollection* _DeviceTypeCollection = context->getservice <mitk::trackingdevicetypecollection>( context->getservicereferences <TrackingDeviceTypeCollection>().front()); _DeviceTypeCollection->RegisterTrackingDeviceType( new mitk::virtualtrackertypeinformationmbi()); std::vector<std::string> all_devices = _DeviceTypeCollection->GetTrackingDeviceTypeNames(); E. Wild, slide 15

16 Always available - autoload CmakeList.txt MITK_CREATE_MODULE( MitkIGTTrackingDeviceExampleDeviceRegistry INCLUDE_DIRS PRIVATE src DEPENDS PRIVATE MitkIGTTrackingDeviceExample MitkIGTUI MitkIGT AUTOLOAD_WITH MitkCore ) Files.cmake set(cpp_files mitkigttrackingdeviceexampleactivator.cpp ) E. Wild, slide 16
17 Always available - autoload mitkigttrackingdeviceexampleactivator.cpp /.h class IGTTrackingDeviceExampleActivator : public us::moduleactivator Private member: QmitkVirtualTrackerWidgetMBI Load function Get Microservice (TrackingDeviceTypeCollection) Register TrackingDevice Get Microservice for widgets (TrackingDeviceWidgetCollection) Register Widget E. Wild, slide 17
18 New Tracking Device Live DEMO E. Wild, slide 18
19 Any Questions? Please ask now or have a look at MITK Documentation Slides available after meeting Source code of example module Microservices - an example of usage in IGT Thank you for your attention! E. Wild, slide 19
Voice Control of da Vinci
 Voice Control of da Vinci Lindsey A. Dean and H. Shawn Xu Mentor: Anton Deguet 5/19/2011 I. Background The da Vinci is a tele-operated robotic surgical system. It is operated by a surgeon sitting at the
Voice Control of da Vinci Lindsey A. Dean and H. Shawn Xu Mentor: Anton Deguet 5/19/2011 I. Background The da Vinci is a tele-operated robotic surgical system. It is operated by a surgeon sitting at the
Computer Assisted Abdominal
 Computer Assisted Abdominal Surgery and NOTES Prof. Luc Soler, Prof. Jacques Marescaux University of Strasbourg, France In the past IRCAD Strasbourg + Taiwain More than 3.000 surgeons trained per year,,
Computer Assisted Abdominal Surgery and NOTES Prof. Luc Soler, Prof. Jacques Marescaux University of Strasbourg, France In the past IRCAD Strasbourg + Taiwain More than 3.000 surgeons trained per year,,
Can technological solutions support user experience, learning, and operation outcome in robotic surgery?
 VTT TECHNICAL RESEARCH CENTRE OF FINLAND LTD Can technological solutions support user experience, learning, and operation outcome in robotic surgery? ERF2016 Session Image Guided Robotic Surgery and Interventions
VTT TECHNICAL RESEARCH CENTRE OF FINLAND LTD Can technological solutions support user experience, learning, and operation outcome in robotic surgery? ERF2016 Session Image Guided Robotic Surgery and Interventions
Medical robotics and Image Guided Therapy (IGT) Bogdan M. Maris, PhD Temporary Assistant Professor
 Bogdan M. Maris, PhD Temporary Assistant Professor") Medical robotics and Image Guided Therapy (IGT) Bogdan M. Maris, PhD Temporary Assistant Professor E-mail bogdan.maris@univr.it Medical Robotics History, current and future applications Robots are Accurate
Medical robotics and Image Guided Therapy (IGT) Bogdan M. Maris, PhD Temporary Assistant Professor E-mail bogdan.maris@univr.it Medical Robotics History, current and future applications Robots are Accurate
Autonomous Surgical Robotics
 Nicolás Pérez de Olaguer Santamaría Autonomous Surgical Robotics 1 / 29 MIN Faculty Department of Informatics Autonomous Surgical Robotics Nicolás Pérez de Olaguer Santamaría University of Hamburg Faculty
Nicolás Pérez de Olaguer Santamaría Autonomous Surgical Robotics 1 / 29 MIN Faculty Department of Informatics Autonomous Surgical Robotics Nicolás Pérez de Olaguer Santamaría University of Hamburg Faculty
Stereoscopic Augmented Reality System for Computer Assisted Surgery
 Marc Liévin and Erwin Keeve Research center c a e s a r, Center of Advanced European Studies and Research, Surgical Simulation and Navigation Group, Friedensplatz 16, 53111 Bonn, Germany. A first architecture
Marc Liévin and Erwin Keeve Research center c a e s a r, Center of Advanced European Studies and Research, Surgical Simulation and Navigation Group, Friedensplatz 16, 53111 Bonn, Germany. A first architecture
Balancing Safety and Cost in Robotically Assisted Surgery
 Balancing Safety and Cost in Robotically Assisted Surgery IROS 2011 LOUAI ADHAMI, PHD LADHAMI@SIMQUEST.COM Thank yous 2 ChIR & XirTek INRIA Intuitive Surgical France & USA HEGP & A. Carpentier The RNTS,
Balancing Safety and Cost in Robotically Assisted Surgery IROS 2011 LOUAI ADHAMI, PHD LADHAMI@SIMQUEST.COM Thank yous 2 ChIR & XirTek INRIA Intuitive Surgical France & USA HEGP & A. Carpentier The RNTS,
HUMAN Robot Cooperation Techniques in Surgery
 HUMAN Robot Cooperation Techniques in Surgery Alícia Casals Institute for Bioengineering of Catalonia (IBEC), Universitat Politècnica de Catalunya (UPC), Barcelona, Spain alicia.casals@upc.edu Keywords:
HUMAN Robot Cooperation Techniques in Surgery Alícia Casals Institute for Bioengineering of Catalonia (IBEC), Universitat Politècnica de Catalunya (UPC), Barcelona, Spain alicia.casals@upc.edu Keywords:
Robots for Medicine and Personal Assistance. Guest lecturer: Ron Alterovitz
 Robots for Medicine and Personal Assistance Guest lecturer: Ron Alterovitz Growth of Robotics Industry Worldwide $70 $56 Market Size (Billions) $42 $28 $14 $0 1995 2000 2005 2010 2015 2020 2025 Source:
Robots for Medicine and Personal Assistance Guest lecturer: Ron Alterovitz Growth of Robotics Industry Worldwide $70 $56 Market Size (Billions) $42 $28 $14 $0 1995 2000 2005 2010 2015 2020 2025 Source:
Accuracy evaluation of an image overlay in an instrument guidance system for laparoscopic liver surgery
 Accuracy evaluation of an image overlay in an instrument guidance system for laparoscopic liver surgery Matteo Fusaglia 1, Daphne Wallach 1, Matthias Peterhans 1, Guido Beldi 2, Stefan Weber 1 1 Artorg
Accuracy evaluation of an image overlay in an instrument guidance system for laparoscopic liver surgery Matteo Fusaglia 1, Daphne Wallach 1, Matthias Peterhans 1, Guido Beldi 2, Stefan Weber 1 1 Artorg
Surgical robot simulation with BBZ console
 Review Article on Thoracic Surgery Surgical robot simulation with BBZ console Francesco Bovo 1, Giacomo De Rossi 2, Francesco Visentin 2,3 1 BBZ srl, Verona, Italy; 2 Department of Computer Science, Università
Review Article on Thoracic Surgery Surgical robot simulation with BBZ console Francesco Bovo 1, Giacomo De Rossi 2, Francesco Visentin 2,3 1 BBZ srl, Verona, Italy; 2 Department of Computer Science, Università
Computer Assisted Medical Interventions
 Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Haptics Technologies: Bringing Touch to Multimedia
 Haptics Technologies: Bringing Touch to Multimedia C2: Haptics Applications Outline Haptic Evolution: from Psychophysics to Multimedia Haptics for Medical Applications Surgical Simulations Stroke-based
Haptics Technologies: Bringing Touch to Multimedia C2: Haptics Applications Outline Haptic Evolution: from Psychophysics to Multimedia Haptics for Medical Applications Surgical Simulations Stroke-based
Medical Robotics Overview of the course
 Medical Robotics Overview of the course September 2017 Guillaume.Morel@upmc.fr Professor in Robotics @ ISIR, UPMC Head of AGATHE, INSERM U1150 Director of Carnot Interfaces Co-founder of GEMA Scope Although
Medical Robotics Overview of the course September 2017 Guillaume.Morel@upmc.fr Professor in Robotics @ ISIR, UPMC Head of AGATHE, INSERM U1150 Director of Carnot Interfaces Co-founder of GEMA Scope Although
1 May Telesurgery with haptic sensation: The future of surgery. Michael Stark The New European Surgical Academy (NESA)
") 1 May 2014 Telesurgery with haptic sensation: The future of surgery Michael Stark The New European Surgical Academy (NESA) Disclosure Michael Stark is the scientific advisor for the EU/SOFAR European Telesurgical
1 May 2014 Telesurgery with haptic sensation: The future of surgery Michael Stark The New European Surgical Academy (NESA) Disclosure Michael Stark is the scientific advisor for the EU/SOFAR European Telesurgical
TREND OF SURGICAL ROBOT TECHNOLOGY AND ITS INDUSTRIAL OUTLOOK
 TREND OF SURGICAL ROBOT TECHNOLOGY AND ITS INDUSTRIAL OUTLOOK BYUNG-JU YI Electronic Systems Engineering Department, Hanyang University, Korea E-mail: bj@hanyang.ac.kr Abstract - Since the launch of the
TREND OF SURGICAL ROBOT TECHNOLOGY AND ITS INDUSTRIAL OUTLOOK BYUNG-JU YI Electronic Systems Engineering Department, Hanyang University, Korea E-mail: bj@hanyang.ac.kr Abstract - Since the launch of the
R (2) Controlling System Application with hands by identifying movements through Camera
 Controlling System Application with hands by identifying movements through Camera") R (2) N (5) Oral (3) Total (10) Dated Sign Assignment Group: C Problem Definition: Controlling System Application with hands by identifying movements through Camera Prerequisite: 1. Web Cam Connectivity
R (2) N (5) Oral (3) Total (10) Dated Sign Assignment Group: C Problem Definition: Controlling System Application with hands by identifying movements through Camera Prerequisite: 1. Web Cam Connectivity
A Virtual Interactive Navigation System for Orthopaedic Surgical Interventions
 A Virtual Interactive Navigation System for Orthopaedic Surgical Interventions Taruna Seth Vipin Chaudhary Cathy Buyea Lawrence Bone Department of Computer Science and Engineering University at Buffalo,
A Virtual Interactive Navigation System for Orthopaedic Surgical Interventions Taruna Seth Vipin Chaudhary Cathy Buyea Lawrence Bone Department of Computer Science and Engineering University at Buffalo,
Evaluation of Haptic Virtual Fixtures in Psychomotor Skill Development for Robotic Surgical Training
 Department of Electronics, Information and Bioengineering Neuroengineering and medical robotics Lab Evaluation of Haptic Virtual Fixtures in Psychomotor Skill Development for Robotic Surgical Training
Department of Electronics, Information and Bioengineering Neuroengineering and medical robotics Lab Evaluation of Haptic Virtual Fixtures in Psychomotor Skill Development for Robotic Surgical Training
SMart wearable Robotic Teleoperated surgery
 SMart wearable Robotic Teleoperated surgery This project has received funding from the European Union s Horizon 2020 research and innovation programme under grant agreement No 732515 Context Minimally
SMart wearable Robotic Teleoperated surgery This project has received funding from the European Union s Horizon 2020 research and innovation programme under grant agreement No 732515 Context Minimally
NIH Public Access Author Manuscript Otol Neurotol. Author manuscript; available in PMC 2012 January 1.
 NIH Public Access Author Manuscript Published in final edited form as: Otol Neurotol. 2011 January ; 32(1): 11 16. doi:10.1097/mao.0b013e3181fcee9e. Robotic Mastoidectomy Andrei Danilchenko, B.S., Graduate
NIH Public Access Author Manuscript Published in final edited form as: Otol Neurotol. 2011 January ; 32(1): 11 16. doi:10.1097/mao.0b013e3181fcee9e. Robotic Mastoidectomy Andrei Danilchenko, B.S., Graduate
Global Robotic Surgery Market: Industry Analysis & Outlook ( )
") Industry Research by Koncept Analytics Global Robotic Surgery Market: Industry Analysis & Outlook ----------------------------------------- (2017-2021) June 2017 1 Executive Summary Medical robotics is
Industry Research by Koncept Analytics Global Robotic Surgery Market: Industry Analysis & Outlook ----------------------------------------- (2017-2021) June 2017 1 Executive Summary Medical robotics is
Job Description. Commitment: Must be available to work full-time hours, M-F for weeks beginning Summer of 2018.
 Research Intern Director of Research We are seeking a summer intern to support the team to develop prototype 3D sensing systems based on state-of-the-art sensing technologies along with computer vision
Research Intern Director of Research We are seeking a summer intern to support the team to develop prototype 3D sensing systems based on state-of-the-art sensing technologies along with computer vision
Robone: Next Generation Orthopedic Surgical Device Final Report
 Robone: Next Generation Orthopedic Surgical Device Final Report Team Members Andrew Hundt Alex Strickland Shahriar Sefati Mentors Prof. Peter Kazanzides (Prof. Taylor) Background: Total hip replacement
Robone: Next Generation Orthopedic Surgical Device Final Report Team Members Andrew Hundt Alex Strickland Shahriar Sefati Mentors Prof. Peter Kazanzides (Prof. Taylor) Background: Total hip replacement
Image Guided Robotic Assisted Surgical Training System using LabVIEW and CompactRIO
 Image Guided Robotic Assisted Surgical Training System using LabVIEW and CompactRIO Weimin Huang 1, Tao Yang 1, Liang Jing Yang 2, Chee Kong Chui 2, Jimmy Liu 1, Jiayin Zhou 1, Jing Zhang 1, Yi Su 3, Stephen
Image Guided Robotic Assisted Surgical Training System using LabVIEW and CompactRIO Weimin Huang 1, Tao Yang 1, Liang Jing Yang 2, Chee Kong Chui 2, Jimmy Liu 1, Jiayin Zhou 1, Jing Zhang 1, Yi Su 3, Stephen
Current Status and Future of Medical Virtual Reality
 2011.08.16 Medical VR Current Status and Future of Medical Virtual Reality Naoto KUME, Ph.D. Assistant Professor of Kyoto University Hospital 1. History of Medical Virtual Reality Virtual reality (VR)
2011.08.16 Medical VR Current Status and Future of Medical Virtual Reality Naoto KUME, Ph.D. Assistant Professor of Kyoto University Hospital 1. History of Medical Virtual Reality Virtual reality (VR)
ehealth : Tools & Methods Dr. Asif Zafar
 ehealth : Tools & Methods Dr. Asif Zafar MBBS, MCPS, M.D. FRCS, FCPS Professor of Surgery, Rawalpindi Medical College Director, Telemedicine & E- Health Training Center, MIS Virtual Training Lab, Holy
ehealth : Tools & Methods Dr. Asif Zafar MBBS, MCPS, M.D. FRCS, FCPS Professor of Surgery, Rawalpindi Medical College Director, Telemedicine & E- Health Training Center, MIS Virtual Training Lab, Holy
Proposal for Robot Assistance for Neurosurgery
 Proposal for Robot Assistance for Neurosurgery Peter Kazanzides Assistant Research Professor of Computer Science Johns Hopkins University December 13, 2007 Funding History Active funding for development
Proposal for Robot Assistance for Neurosurgery Peter Kazanzides Assistant Research Professor of Computer Science Johns Hopkins University December 13, 2007 Funding History Active funding for development
Virtual and Augmented Reality Applications
 Department of Engineering for Innovation University of Salento Lecce, Italy Augmented and Virtual Reality Laboratory (AVR Lab) Keynote Speech: Augmented and Virtual Reality Laboratory (AVR Lab) Keynote
Department of Engineering for Innovation University of Salento Lecce, Italy Augmented and Virtual Reality Laboratory (AVR Lab) Keynote Speech: Augmented and Virtual Reality Laboratory (AVR Lab) Keynote
ERC: Engineering Research Center for Computer- Integrated Surgical Systems and Technology (NSF Grant # )
") ERC: Engineering Research Center for Computer- Integrated Surgical Systems and Technology (NSF Grant #9731748) MARCIN BALICKI 1, and TIAN XIA 2 1,2 Johns Hopkins University, 3400 Charles St., Baltimore,
ERC: Engineering Research Center for Computer- Integrated Surgical Systems and Technology (NSF Grant #9731748) MARCIN BALICKI 1, and TIAN XIA 2 1,2 Johns Hopkins University, 3400 Charles St., Baltimore,
Role of virtual simulation in surgical training
 Review Article on Thoracic Surgery Role of virtual simulation in surgical training Davide Zerbato 1, Diego Dall Alba 2 1 BBZ srl, Verona, Italy; 2 Department of Computer Science, University of Verona,
Review Article on Thoracic Surgery Role of virtual simulation in surgical training Davide Zerbato 1, Diego Dall Alba 2 1 BBZ srl, Verona, Italy; 2 Department of Computer Science, University of Verona,
From large-scale, multi-user VR to cloud streamed car configurator. Martin Rademacher & Thomas Orenz, AUDI AG
 From large-scale, multi-user VR to cloud streamed car configurator Martin Rademacher & Thomas Orenz, AUDI AG AUDI AG I/VS AUDI AG - From large-scale, multi-user VR to cloud streamed car configurator Virtual
From large-scale, multi-user VR to cloud streamed car configurator Martin Rademacher & Thomas Orenz, AUDI AG AUDI AG I/VS AUDI AG - From large-scale, multi-user VR to cloud streamed car configurator Virtual
Doctors Assistive System Using Augmented Reality for Critical Analysis
 Doctors Assistive System Using Augmented Reality for Critical Analysis L.Ramachandran 1, R.Rohit 2, Mr.Jagan Babu.J 3 1,2 Department of Electronics and Communication Engineering, R.M.D Engineering College,
Doctors Assistive System Using Augmented Reality for Critical Analysis L.Ramachandran 1, R.Rohit 2, Mr.Jagan Babu.J 3 1,2 Department of Electronics and Communication Engineering, R.M.D Engineering College,
Scopis Hybrid Navigation with Augmented Reality
 Scopis Hybrid Navigation with Augmented Reality Intelligent navigation systems for head surgery www.scopis.com Scopis Hybrid Navigation One System. Optical and electromagnetic measurement technology. As
Scopis Hybrid Navigation with Augmented Reality Intelligent navigation systems for head surgery www.scopis.com Scopis Hybrid Navigation One System. Optical and electromagnetic measurement technology. As
Robot assisted craniofacial surgery: first clinical evaluation
 Robot assisted craniofacial surgery: first clinical evaluation C. Burghart*, R. Krempien, T. Redlich+, A. Pernozzoli+, H. Grabowski*, J. Muenchenberg*, J. Albers#, S. Haßfeld+, C. Vahl#, U. Rembold*, H.
Robot assisted craniofacial surgery: first clinical evaluation C. Burghart*, R. Krempien, T. Redlich+, A. Pernozzoli+, H. Grabowski*, J. Muenchenberg*, J. Albers#, S. Haßfeld+, C. Vahl#, U. Rembold*, H.
Augmented Reality in Medicine
 Review Augmented Reality in Medicine https://doi.org/10.7599/hmr.2016.36.4.242 pissn 1738-429X eissn 2234-4446 Ho-Gun Ha, Jaesung Hong Department of Robotics Engineering, Daegu Gyeongbuk Institute of Science
Review Augmented Reality in Medicine https://doi.org/10.7599/hmr.2016.36.4.242 pissn 1738-429X eissn 2234-4446 Ho-Gun Ha, Jaesung Hong Department of Robotics Engineering, Daegu Gyeongbuk Institute of Science
MIVS Tel:
 www.medical-imaging.org.uk medvis-info@bangor.ac.uk Tel: 01248 388244 MIVS 2014 Medical Imaging and Visualization Solutions Drop in centre from 10.00am-4.00pm Friday 17th Jan 2014 - Bangor, Gwynedd Post
www.medical-imaging.org.uk medvis-info@bangor.ac.uk Tel: 01248 388244 MIVS 2014 Medical Imaging and Visualization Solutions Drop in centre from 10.00am-4.00pm Friday 17th Jan 2014 - Bangor, Gwynedd Post
What's New July 15, Dr. Stuart Wolf
 The University of Michigan Department of Urology 3875 Taubman Center, 1500 E. Medical Center Drive, SPC 5330, Ann Arbor, Michigan 48109-5330 Academic Office: (734) 232-4943 FAX: (734) 936-8037 www.medicine.umich.edu/dept/urology
The University of Michigan Department of Urology 3875 Taubman Center, 1500 E. Medical Center Drive, SPC 5330, Ann Arbor, Michigan 48109-5330 Academic Office: (734) 232-4943 FAX: (734) 936-8037 www.medicine.umich.edu/dept/urology
Haptic Feedback in Laparoscopic and Robotic Surgery
 Haptic Feedback in Laparoscopic and Robotic Surgery Dr. Warren Grundfest Professor Bioengineering, Electrical Engineering & Surgery UCLA, Los Angeles, California Acknowledgment This Presentation & Research
Haptic Feedback in Laparoscopic and Robotic Surgery Dr. Warren Grundfest Professor Bioengineering, Electrical Engineering & Surgery UCLA, Los Angeles, California Acknowledgment This Presentation & Research
Augmented Reality needle ablation guidance tool for Irreversible Electroporation in the pancreas
 Augmented Reality needle ablation guidance tool for Irreversible Electroporation in the pancreas Timur Kuzhagaliyev a,b,c, Neil T. Clancy* a,b,c, Mirek Janatka a,b,c, Kevin Tchaka a,b,c, Francisco Vasconcelos
Augmented Reality needle ablation guidance tool for Irreversible Electroporation in the pancreas Timur Kuzhagaliyev a,b,c, Neil T. Clancy* a,b,c, Mirek Janatka a,b,c, Kevin Tchaka a,b,c, Francisco Vasconcelos
Creating an Infrastructure to Address HCMDSS Challenges Introduction Enabling Technologies for Future Medical Devices
 Creating an Infrastructure to Address HCMDSS Challenges Peter Kazanzides and Russell H. Taylor Center for Computer-Integrated Surgical Systems and Technology (CISST ERC) Johns Hopkins University, Baltimore
Creating an Infrastructure to Address HCMDSS Challenges Peter Kazanzides and Russell H. Taylor Center for Computer-Integrated Surgical Systems and Technology (CISST ERC) Johns Hopkins University, Baltimore
COMPUTER AIDED MEDICAL DIAGNOSIS AND SURGERY SYSTEM: TOWARDS AUTOMATED MEDICAL DIAGNOSIS FOR LONG TERM SPACE MISSIONS
 COMPUTER AIDED MEDICAL DIAGNOSIS AND SURGERY SYSTEM: TOWARDS AUTOMATED MEDICAL DIAGNOSIS FOR LONG TERM SPACE MISSIONS Yashodhan Nevatia (1), Keshav Chintamani (1), Tangi Meyer (1), Tobias Blum (2), Arnaud
COMPUTER AIDED MEDICAL DIAGNOSIS AND SURGERY SYSTEM: TOWARDS AUTOMATED MEDICAL DIAGNOSIS FOR LONG TERM SPACE MISSIONS Yashodhan Nevatia (1), Keshav Chintamani (1), Tangi Meyer (1), Tobias Blum (2), Arnaud
Augmented Reality for Minimally Invasive Surgery: Overview and Some Recent Advances
 Augmented Reality for Minimally Invasive Surgery: Overview and Some Recent Advances Pablo Lamata 1,2, Wajid Ali 3, Alicia Cano 1, Jordi Cornella 3, Jerome Declerck 2, Ole J. Elle 3, Adinda Freudenthal
Augmented Reality for Minimally Invasive Surgery: Overview and Some Recent Advances Pablo Lamata 1,2, Wajid Ali 3, Alicia Cano 1, Jordi Cornella 3, Jerome Declerck 2, Ole J. Elle 3, Adinda Freudenthal
Virtually Extended Surgical Drilling Device: Virtual Mirror for Navigated Spine Surgery
 Virtually Extended Surgical Drilling Device: Virtual Mirror for Navigated Spine Surgery Christoph Bichlmeier 1, Sandro Michael Heining 2, Mohammad Rustaee 1, and Nassir Navab 1 1 Computer Aided Medical
Virtually Extended Surgical Drilling Device: Virtual Mirror for Navigated Spine Surgery Christoph Bichlmeier 1, Sandro Michael Heining 2, Mohammad Rustaee 1, and Nassir Navab 1 1 Computer Aided Medical
Virtual and Augmented Reality techniques embedded and based on a Operative Microscope. Training for Neurosurgery.
 Virtual and Augmented Reality techniques embedded and based on a Operative Microscope. Training for Neurosurgery. 1 M. Aschke 1, M.Ciucci 1,J.Raczkowsky 1, R.Wirtz 2, H. Wörn 1 1 IPR, Institute for Process
Virtual and Augmented Reality techniques embedded and based on a Operative Microscope. Training for Neurosurgery. 1 M. Aschke 1, M.Ciucci 1,J.Raczkowsky 1, R.Wirtz 2, H. Wörn 1 1 IPR, Institute for Process
Robots in Image-Guided Interventions
 Robots in Image-Guided Interventions Peter Kazanzides Associate Research Professor Dept. of Computer Science The Johns Hopkins University My Background 1983-1988 Ph.D. EE (Robotics), Brown University 1989-1990
Robots in Image-Guided Interventions Peter Kazanzides Associate Research Professor Dept. of Computer Science The Johns Hopkins University My Background 1983-1988 Ph.D. EE (Robotics), Brown University 1989-1990
NeuroSim - The Prototype of a Neurosurgical Training Simulator
 NeuroSim - The Prototype of a Neurosurgical Training Simulator Florian BEIER a,1,stephandiederich a,kirstenschmieder b and Reinhard MÄNNER a,c a Institute for Computational Medicine, University of Heidelberg
NeuroSim - The Prototype of a Neurosurgical Training Simulator Florian BEIER a,1,stephandiederich a,kirstenschmieder b and Reinhard MÄNNER a,c a Institute for Computational Medicine, University of Heidelberg
Evaluation of a portable image overlay projector for the visualisation of surgical navigation data: phantom studies
 Int J CARS (2012) 7:547 556 DOI 10.1007/s11548-011-0660-7 ORIGINAL ARTICLE Evaluation of a portable image overlay projector for the visualisation of surgical navigation data: phantom studies K. Gavaghan
Int J CARS (2012) 7:547 556 DOI 10.1007/s11548-011-0660-7 ORIGINAL ARTICLE Evaluation of a portable image overlay projector for the visualisation of surgical navigation data: phantom studies K. Gavaghan
Telemanipulation and Telestration for Microsurgery Summary
 Telemanipulation and Telestration for Microsurgery Summary Microsurgery presents an array of problems. For instance, current methodologies of Eye Surgery requires freehand manipulation of delicate structures
Telemanipulation and Telestration for Microsurgery Summary Microsurgery presents an array of problems. For instance, current methodologies of Eye Surgery requires freehand manipulation of delicate structures
Minimally invasive surgical skills evaluation in the field of otolaryngology
 Minimally invasive surgical skills evaluation in the field of otolaryngology Alejandro Cuevas 1, Daniel Lorias 1, Arturo Minor 1, Jose A. Gutierrez 2, Rigoberto Martinez 3 1 CINVESTAV-IPN, México D.F.,
Minimally invasive surgical skills evaluation in the field of otolaryngology Alejandro Cuevas 1, Daniel Lorias 1, Arturo Minor 1, Jose A. Gutierrez 2, Rigoberto Martinez 3 1 CINVESTAV-IPN, México D.F.,
Automatic Detection and Segmentation of Robot-Assisted Surgical Motions
 Automatic Detection and Segmentation of Robot-Assisted Surgical Motions Henry C. Lin 1, Izhak Shafran 2, Todd E. Murphy, Allison M. Okamura, David D. Yuh, and Gregory D. Hager 1 1 Department of Computer
Automatic Detection and Segmentation of Robot-Assisted Surgical Motions Henry C. Lin 1, Izhak Shafran 2, Todd E. Murphy, Allison M. Okamura, David D. Yuh, and Gregory D. Hager 1 1 Department of Computer
Distributed Robotics: Building an environment for digital cooperation. Artificial Intelligence series
 Distributed Robotics: Building an environment for digital cooperation Artificial Intelligence series Distributed Robotics March 2018 02 From programmable machines to intelligent agents Robots, from the
Distributed Robotics: Building an environment for digital cooperation Artificial Intelligence series Distributed Robotics March 2018 02 From programmable machines to intelligent agents Robots, from the
Products - Microarray Scanners - Laser Scanners - InnoScan 900 Series and MAPIX Software
 Products - Microarray Scanners - Laser Scanners - InnoScan 900 Series and MAPIX Software Arrayit offers the world s only next generation microarray scanning technology, with proprietary rotary motion control,
Products - Microarray Scanners - Laser Scanners - InnoScan 900 Series and MAPIX Software Arrayit offers the world s only next generation microarray scanning technology, with proprietary rotary motion control,
Advanced Augmented Reality Telestration Techniques With Applications In Laparoscopic And Robotic Surgery
 Wayne State University Wayne State University Dissertations 1-1-2013 Advanced Augmented Reality Telestration Techniques With Applications In Laparoscopic And Robotic Surgery Stephen Dworzecki Wayne State
Wayne State University Wayne State University Dissertations 1-1-2013 Advanced Augmented Reality Telestration Techniques With Applications In Laparoscopic And Robotic Surgery Stephen Dworzecki Wayne State
Medical Robots. Healing and Helping. Monika and Wen
 Medical Robots Healing and Helping Monika and Wen Index Definition My definition For what? History Other facts C' Arm Telediagnosis MRI Robitom Nursery Robotic Surgery Telesurgery Advantages & Disadvantages
Medical Robots Healing and Helping Monika and Wen Index Definition My definition For what? History Other facts C' Arm Telediagnosis MRI Robitom Nursery Robotic Surgery Telesurgery Advantages & Disadvantages
Recent Progress on Wearable Augmented Interaction at AIST
 Recent Progress on Wearable Augmented Interaction at AIST Takeshi Kurata 12 1 Human Interface Technology Lab University of Washington 2 AIST, Japan kurata@ieee.org Weavy The goal of the Weavy project team
Recent Progress on Wearable Augmented Interaction at AIST Takeshi Kurata 12 1 Human Interface Technology Lab University of Washington 2 AIST, Japan kurata@ieee.org Weavy The goal of the Weavy project team
Epona Medical simulation products catalog Version 1.0
 Epona Medical simulation products catalog Version 1.0 Simulator for laparoscopic surgery Simulator for Arthroscopic surgery Simulator for infant patient critical care Simulator for vascular procedures
Epona Medical simulation products catalog Version 1.0 Simulator for laparoscopic surgery Simulator for Arthroscopic surgery Simulator for infant patient critical care Simulator for vascular procedures
Marco Cavallo. Merging Worlds: A Location-based Approach to Mixed Reality. Marco Cavallo Master Thesis Presentation POLITECNICO DI MILANO
 Marco Cavallo Merging Worlds: A Location-based Approach to Mixed Reality Marco Cavallo Master Thesis Presentation POLITECNICO DI MILANO Introduction: A New Realm of Reality 2 http://www.samsung.com/sg/wearables/gear-vr/
Marco Cavallo Merging Worlds: A Location-based Approach to Mixed Reality Marco Cavallo Master Thesis Presentation POLITECNICO DI MILANO Introduction: A New Realm of Reality 2 http://www.samsung.com/sg/wearables/gear-vr/
Journal of Biomedical Informatics
 Journal of Biomedical Informatics 44 (2011) 198 215 Contents lists available at ScienceDirect Journal of Biomedical Informatics journal homepage: www.elsevier.com/locate/yjbin Collaborative co-design of
Journal of Biomedical Informatics 44 (2011) 198 215 Contents lists available at ScienceDirect Journal of Biomedical Informatics journal homepage: www.elsevier.com/locate/yjbin Collaborative co-design of
Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery
 Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery Claudio Pacchierotti Domenico Prattichizzo Katherine J. Kuchenbecker Motivation Despite its expected clinical
Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery Claudio Pacchierotti Domenico Prattichizzo Katherine J. Kuchenbecker Motivation Despite its expected clinical
On past, present and future of a scientific competition for service robots
 On RoboCup@Home past, present and future of a scientific competition for service robots Dirk Holz 1, Javier Ruiz del Solar 2, Komei Sugiura 3, and Sven Wachsmuth 4 1 Autonomous Intelligent Systems Group,
On RoboCup@Home past, present and future of a scientific competition for service robots Dirk Holz 1, Javier Ruiz del Solar 2, Komei Sugiura 3, and Sven Wachsmuth 4 1 Autonomous Intelligent Systems Group,
Surgical Robot Competition Introducing Engineering in Medicine to Pre-college Students
 Session 2793 Surgical Robot Competition Introducing Engineering in Medicine to Pre-college Students Oleg Gerovichev, Randal P. Goldberg, Ian D. Donn, Anand Viswanathan, Russell H. Taylor Department of
Session 2793 Surgical Robot Competition Introducing Engineering in Medicine to Pre-college Students Oleg Gerovichev, Randal P. Goldberg, Ian D. Donn, Anand Viswanathan, Russell H. Taylor Department of
Distributed Modular Computer-Integrated Surgical Robotic Systems:
 Distributed Modular Computer-Integrated Surgical Robotic Systems: Implementation using Modular Software and Networked Systems Andrew Bzostek 1,4, Rajesh Kumar 1,4, Nobuhiko Hata 2,4, Oliver Schorr 2,3,4,
Distributed Modular Computer-Integrated Surgical Robotic Systems: Implementation using Modular Software and Networked Systems Andrew Bzostek 1,4, Rajesh Kumar 1,4, Nobuhiko Hata 2,4, Oliver Schorr 2,3,4,
HCI Design in the OR: A Gesturing Case-Study"
 HCI Design in the OR: A Gesturing Case-Study" Ali Bigdelou 1, Ralf Stauder 1, Tobias Benz 1, Aslı Okur 1,! Tobias Blum 1, Reza Ghotbi 2, and Nassir Navab 1!!! 1 Computer Aided Medical Procedures (CAMP),!
HCI Design in the OR: A Gesturing Case-Study" Ali Bigdelou 1, Ralf Stauder 1, Tobias Benz 1, Aslı Okur 1,! Tobias Blum 1, Reza Ghotbi 2, and Nassir Navab 1!!! 1 Computer Aided Medical Procedures (CAMP),!
Measurements of the Level of Surgical Expertise Using Flight Path Analysis from da Vinci Robotic Surgical System
 Measurements of the Level of Surgical Expertise Using Flight Path Analysis from da Vinci Robotic Surgical System Lawton Verner 1, Dmitry Oleynikov, MD 1, Stephen Holtmann 1, Hani Haider, Ph D 1, Leonid
Measurements of the Level of Surgical Expertise Using Flight Path Analysis from da Vinci Robotic Surgical System Lawton Verner 1, Dmitry Oleynikov, MD 1, Stephen Holtmann 1, Hani Haider, Ph D 1, Leonid
MRI IS a medical imaging technique commonly used in
 1476 IEEE TRANSACTIONS ON BIOMEDICAL ENGINEERING, VOL. 57, NO. 6, JUNE 2010 3-D Augmented Reality for MRI-Guided Surgery Using Integral Videography Autostereoscopic Image Overlay Hongen Liao, Member, IEEE,
1476 IEEE TRANSACTIONS ON BIOMEDICAL ENGINEERING, VOL. 57, NO. 6, JUNE 2010 3-D Augmented Reality for MRI-Guided Surgery Using Integral Videography Autostereoscopic Image Overlay Hongen Liao, Member, IEEE,
Technique Guide. 4.5 mm Cannulated Screws. Part of the Synthes Cannulated Screw System.
 Technique Guide 4.5 mm Cannulated Screws. Part of the Synthes Cannulated Screw System. TableofContents Introduction 4.5 mm Cannulated Screws 2 AO Principles 3 Indications 4 Surgical Technique Surgical
Technique Guide 4.5 mm Cannulated Screws. Part of the Synthes Cannulated Screw System. TableofContents Introduction 4.5 mm Cannulated Screws 2 AO Principles 3 Indications 4 Surgical Technique Surgical
Simendo laparoscopy. product information
 Simendo laparoscopy product information Simendo laparoscopy The Simendo laparoscopy simulator is designed for all laparoscopic specialties, such as general surgery, gynaecology en urology. The simulator
Simendo laparoscopy product information Simendo laparoscopy The Simendo laparoscopy simulator is designed for all laparoscopic specialties, such as general surgery, gynaecology en urology. The simulator
Haptics in Medical Simulation
 Haptics in Medical Simulation Allison M. Okamura Associate Professor Department of Mechanical Engineering Design and Biomechanics Groups Stanford University Collaborative Haptics and Robotics in Medicine
Haptics in Medical Simulation Allison M. Okamura Associate Professor Department of Mechanical Engineering Design and Biomechanics Groups Stanford University Collaborative Haptics and Robotics in Medicine
Sensor-based robot control for Physical-Human Robot Interaction. IDH Interactive Digital Humans
 Sensor-based robot control for Physical-Human Robot Interaction IDH Interactive Digital Humans Robotics Department DEXTER - Design, control, handling - Parallel and medical robotics DEMAR - Modeling and
Sensor-based robot control for Physical-Human Robot Interaction IDH Interactive Digital Humans Robotics Department DEXTER - Design, control, handling - Parallel and medical robotics DEMAR - Modeling and
Augmented Navigation Patricia Sazama, Xuetong Sun, Derek Juba, and Amitabh Varshney
 Patricia Sazama, Xuetong Sun, Derek Juba, and Amitabh Varshney Two Domains Augmented Driving (and walking) Augmented Surgery Augmented Driving Problem Augment what we can see while driving with additional
Patricia Sazama, Xuetong Sun, Derek Juba, and Amitabh Varshney Two Domains Augmented Driving (and walking) Augmented Surgery Augmented Driving Problem Augment what we can see while driving with additional
5th Metatarsal Fracture System Surgical Technique
 5th Metatarsal Fracture System Surgical Technique 5th Metatarsal Fracture System 5th Metatarsal Fracture System The 5th Metatarsal Fracture System (AR-8956S) is a uniquely designed screw and plate system
5th Metatarsal Fracture System Surgical Technique 5th Metatarsal Fracture System 5th Metatarsal Fracture System The 5th Metatarsal Fracture System (AR-8956S) is a uniquely designed screw and plate system
ISCW 2001 Tutorial. An Introduction to Augmented Reality
 ISCW 2001 Tutorial An Introduction to Augmented Reality Mark Billinghurst Human Interface Technology Laboratory University of Washington, Seattle grof@hitl.washington.edu Dieter Schmalstieg Technical University
ISCW 2001 Tutorial An Introduction to Augmented Reality Mark Billinghurst Human Interface Technology Laboratory University of Washington, Seattle grof@hitl.washington.edu Dieter Schmalstieg Technical University
Benchmarking Intelligent Service Robots through Scientific Competitions: the approach. Luca Iocchi. Sapienza University of Rome, Italy
 Benchmarking Intelligent Service Robots through Scientific Competitions: the RoboCup@Home approach Luca Iocchi Sapienza University of Rome, Italy Motivation Benchmarking Domestic Service Robots Complex
Benchmarking Intelligent Service Robots through Scientific Competitions: the RoboCup@Home approach Luca Iocchi Sapienza University of Rome, Italy Motivation Benchmarking Domestic Service Robots Complex
A SURVEY OF MOBILE APPLICATION USING AUGMENTED REALITY
 Volume 117 No. 22 2017, 209-213 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu ijpam.eu A SURVEY OF MOBILE APPLICATION USING AUGMENTED REALITY Mrs.S.Hemamalini
Volume 117 No. 22 2017, 209-213 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu ijpam.eu A SURVEY OF MOBILE APPLICATION USING AUGMENTED REALITY Mrs.S.Hemamalini
Digital Signage from static and passive to dynamic and interactive
 Digital Signage from static and passive to dynamic and interactive 27.9.2011, VTT, Espoo Johannes Peltola, Sari Järvinen, Satu-Marja Mäkelä, Tommi Keränen, Tatu Harviainen VTT Technical Research Centre
Digital Signage from static and passive to dynamic and interactive 27.9.2011, VTT, Espoo Johannes Peltola, Sari Järvinen, Satu-Marja Mäkelä, Tommi Keränen, Tatu Harviainen VTT Technical Research Centre
Collaborative Robots and the factory of the future. Nicolas De Keijser Assembly & Test Business Line Manager, USA
 2018-09-26 Collaborative Robots and the factory of the future Nicolas De Keijser Assembly & Test Business Line Manager, USA Strong Growth for Collaborative Robots Forecasted October 1, 2018 Slide 2 ABB
2018-09-26 Collaborative Robots and the factory of the future Nicolas De Keijser Assembly & Test Business Line Manager, USA Strong Growth for Collaborative Robots Forecasted October 1, 2018 Slide 2 ABB
Department of Computer Science and Engineering The Chinese University of Hong Kong. Year Final Year Project
 Digital Interactive Game Interface Table Apps for ipad Supervised by: Professor Michael R. Lyu Student: Ng Ka Hung (1009615714) Chan Hing Faat (1009618344) Year 2011 2012 Final Year Project Department
Digital Interactive Game Interface Table Apps for ipad Supervised by: Professor Michael R. Lyu Student: Ng Ka Hung (1009615714) Chan Hing Faat (1009618344) Year 2011 2012 Final Year Project Department
An Augmented Reality Application for the Enhancement of Surgical Decisions
 An Augmented Reality Application for the Enhancement of Surgical Decisions Lucio T. De Paolis, Giovanni Aloisio Department of Innovation Engineering Salento University Lecce, Italy lucio.depaolis@unisalento.it
An Augmented Reality Application for the Enhancement of Surgical Decisions Lucio T. De Paolis, Giovanni Aloisio Department of Innovation Engineering Salento University Lecce, Italy lucio.depaolis@unisalento.it
Head Tracking for Google Cardboard by Simond Lee
 Head Tracking for Google Cardboard by Simond Lee (slee74@student.monash.edu) Virtual Reality Through Head-mounted Displays A head-mounted display (HMD) is a device which is worn on the head with screen
Head Tracking for Google Cardboard by Simond Lee (slee74@student.monash.edu) Virtual Reality Through Head-mounted Displays A head-mounted display (HMD) is a device which is worn on the head with screen
Benchmarking Intelligent Service Robots through Scientific Competitions. Luca Iocchi. Sapienza University of Rome, Italy
 RoboCup@Home Benchmarking Intelligent Service Robots through Scientific Competitions Luca Iocchi Sapienza University of Rome, Italy Motivation Development of Domestic Service Robots Complex Integrated
RoboCup@Home Benchmarking Intelligent Service Robots through Scientific Competitions Luca Iocchi Sapienza University of Rome, Italy Motivation Development of Domestic Service Robots Complex Integrated
Robots in the Field of Medicine
 Robots in the Field of Medicine Austin Gillis and Peter Demirdjian Malden Catholic High School 1 Pioneers Robots in the Field of Medicine The use of robots in medicine is where it is today because of four
Robots in the Field of Medicine Austin Gillis and Peter Demirdjian Malden Catholic High School 1 Pioneers Robots in the Field of Medicine The use of robots in medicine is where it is today because of four
GERRIT User Summit Robot Comments Edwin Kempin, Google
 GERRIT User Summit 2016 Robot Comments Edwin Kempin, Google What are Robot Comments? Robot Comments = Comments generated by automated systems. What are Robot Comments? E.g. created by static analysis tools
GERRIT User Summit 2016 Robot Comments Edwin Kempin, Google What are Robot Comments? Robot Comments = Comments generated by automated systems. What are Robot Comments? E.g. created by static analysis tools
Quantitative, spectrally- resolved intraoperative
 1 Quantitative, spectrally- resolved intraoperative fluorescence imaging Pablo A. Valdés 1,2,3, Frederic Leblond 1, Valerie L. Jacobs 2, Brian C. Wilson 5, Keith D. Paulsen 1,2,4, & David W. Roberts 2,3,4
1 Quantitative, spectrally- resolved intraoperative fluorescence imaging Pablo A. Valdés 1,2,3, Frederic Leblond 1, Valerie L. Jacobs 2, Brian C. Wilson 5, Keith D. Paulsen 1,2,4, & David W. Roberts 2,3,4
Augmented Reality to Localize Individual Organ in Surgical Procedure
 Tutorial Healthc Inform Res. 2018 October;24(4):394-401. https://doi.org/10.4258/hir.2018.24.4.394 pissn 2093-3681 eissn 2093-369X Augmented Reality to Localize Individual Organ in Surgical Procedure Dongheon
Tutorial Healthc Inform Res. 2018 October;24(4):394-401. https://doi.org/10.4258/hir.2018.24.4.394 pissn 2093-3681 eissn 2093-369X Augmented Reality to Localize Individual Organ in Surgical Procedure Dongheon
Kirigami. Marco Martin
 Kirigami Marco Martin Design phase, HIG work in progress Based upon Design guidelines of visual Design Group https://community.kde.org/kde_visual_design_group/kirigamihig The fastest way to have consistent
Kirigami Marco Martin Design phase, HIG work in progress Based upon Design guidelines of visual Design Group https://community.kde.org/kde_visual_design_group/kirigamihig The fastest way to have consistent
DEVELOPING SENSORS FOR SURGERY SUPPORT ROBOTS Mona Kudo
 DEVELOPING SENSORS FOR SURGERY SUPPORT ROBOTS 20328 Mona Kudo 1. INTRODUCTION Today, many kinds of surgery support robots are used in medical procedures all over economically advanced countries such as
DEVELOPING SENSORS FOR SURGERY SUPPORT ROBOTS 20328 Mona Kudo 1. INTRODUCTION Today, many kinds of surgery support robots are used in medical procedures all over economically advanced countries such as
Policy for the Surgical Release of Trigger Finger Policy Number 32 (Pan Lancashire)
") Policy for the Surgical Release of Trigger Finger Policy Number 32 (Pan Lancashire) Version of: December 2017 Version of: November 2017 Version Number: Changes Made: 1.1 OPCS and ICD codes added to appendices
Policy for the Surgical Release of Trigger Finger Policy Number 32 (Pan Lancashire) Version of: December 2017 Version of: November 2017 Version Number: Changes Made: 1.1 OPCS and ICD codes added to appendices
Feasibility of photoacoustic image guidance for telerobotic endonasal transsphenoidal surgery
 Feasibility of photoacoustic image guidance for telerobotic endonasal transsphenoidal surgery Sungmin Kim, Youri Tan, Peter Kazanzides, and Muyinatu A. Lediju Bell Abstract Injury to the internal carotid
Feasibility of photoacoustic image guidance for telerobotic endonasal transsphenoidal surgery Sungmin Kim, Youri Tan, Peter Kazanzides, and Muyinatu A. Lediju Bell Abstract Injury to the internal carotid
The Holographic Human for surgical navigation using Microsoft HoloLens
 EPiC Series in Engineering Volume 1, 2018, Pages 26 30 ReVo 2017: Laval Virtual ReVolution 2017 Transhumanism++ Engineering The Holographic Human for surgical navigation using Microsoft HoloLens Tomoki
EPiC Series in Engineering Volume 1, 2018, Pages 26 30 ReVo 2017: Laval Virtual ReVolution 2017 Transhumanism++ Engineering The Holographic Human for surgical navigation using Microsoft HoloLens Tomoki
The Visible Korean Human Phantom: Realistic Test & Development Environments for Medical Augmented Reality
 The Visible Korean Human Phantom: Realistic Test & Development Environments for Medical Augmented Reality Christoph Bichlmeier 1, Ben Ockert 2, Oliver Kutter 1, Mohammad Rustaee 1, Sandro Michael Heining
The Visible Korean Human Phantom: Realistic Test & Development Environments for Medical Augmented Reality Christoph Bichlmeier 1, Ben Ockert 2, Oliver Kutter 1, Mohammad Rustaee 1, Sandro Michael Heining
unity 3d and playmaker pdf Unity 3D and PlayMaker Essentials: Game Development from Practical Game Design with Unity and Playmaker - pdf
 DOWNLOAD OR READ : UNITY 3D AND PLAYMAKER ESSENTIALS GAME DEVELOPMENT FROM CONCEPT TO PUBLISHING FOCAL PRESS GAME DESIGN WORKSHOPS 3D GAME ENGINE ARCHITECTURE ENGINEERING REAL TIME APPLICATIONS WITH WILD
DOWNLOAD OR READ : UNITY 3D AND PLAYMAKER ESSENTIALS GAME DEVELOPMENT FROM CONCEPT TO PUBLISHING FOCAL PRESS GAME DESIGN WORKSHOPS 3D GAME ENGINE ARCHITECTURE ENGINEERING REAL TIME APPLICATIONS WITH WILD
Calcaneus StepPlate. Surgical Technique. Calcaneus StepPlate
 Calcaneus StepPlate Surgical Technique Calcaneus StepPlate Medializing Calcaneal Osteotomy (MCO) with Calcaneus StepPlate 1 2 Perform an incision on the lateral side of the calcaneus. An L -shaped incision
Calcaneus StepPlate Surgical Technique Calcaneus StepPlate Medializing Calcaneal Osteotomy (MCO) with Calcaneus StepPlate 1 2 Perform an incision on the lateral side of the calcaneus. An L -shaped incision
(10) Patent No.: US 8,504,136 Bl
 Patent No.: US 8,504,136 Bl") 111111 1111111111111111111111111111111111111111111111111111111111111 US008504136Bl c12) United States Patent Sun et al. (10) Patent No.: US 8,504,136 Bl (45) Date of Patent: Aug. 6, 2013 (54) SEE-THROUGH
111111 1111111111111111111111111111111111111111111111111111111111111 US008504136Bl c12) United States Patent Sun et al. (10) Patent No.: US 8,504,136 Bl (45) Date of Patent: Aug. 6, 2013 (54) SEE-THROUGH
Da Vinci Tool Torque Mapping over 50,000 Grasps and its Implications on Grip Force Estimation Accuracy
 Da Vinci Tool Torque Mapping over 50,000 Grasps and its Implications on Grip Force Estimation Accuracy Nathan J. Kong, Trevor K. Stephens, and Timothy M. Kowalewski Abstract Despite the increasing use
Da Vinci Tool Torque Mapping over 50,000 Grasps and its Implications on Grip Force Estimation Accuracy Nathan J. Kong, Trevor K. Stephens, and Timothy M. Kowalewski Abstract Despite the increasing use
Author Manuscript Int J Comput Assist Radiol Surg. Author manuscript; available in PMC 2016 March 01.
 NIH Public Access Author Manuscript Published in final edited form as: Int J Comput Assist Radiol Surg. 2015 March ; 10(3): 285 292. doi:10.1007/s11548-014-1081-1. OpenIGTLink interface for state control
NIH Public Access Author Manuscript Published in final edited form as: Int J Comput Assist Radiol Surg. 2015 March ; 10(3): 285 292. doi:10.1007/s11548-014-1081-1. OpenIGTLink interface for state control
Università di Roma La Sapienza. Medical Robotics. A Teleoperation System for Research in MIRS. Marilena Vendittelli
 Università di Roma La Sapienza Medical Robotics A Teleoperation System for Research in MIRS Marilena Vendittelli the DLR teleoperation system slave three versatile robots MIRO light-weight: weight < 10
Università di Roma La Sapienza Medical Robotics A Teleoperation System for Research in MIRS Marilena Vendittelli the DLR teleoperation system slave three versatile robots MIRO light-weight: weight < 10
Improving Depth Perception in Medical AR
 Improving Depth Perception in Medical AR A Virtual Vision Panel to the Inside of the Patient Christoph Bichlmeier 1, Tobias Sielhorst 1, Sandro M. Heining 2, Nassir Navab 1 1 Chair for Computer Aided Medical
Improving Depth Perception in Medical AR A Virtual Vision Panel to the Inside of the Patient Christoph Bichlmeier 1, Tobias Sielhorst 1, Sandro M. Heining 2, Nassir Navab 1 1 Chair for Computer Aided Medical
EXPLORING THE PERFORMANCE OF THE IROBOT CREATE FOR OBJECT RELOCATION IN OUTER SPACE
 EXPLORING THE PERFORMANCE OF THE IROBOT CREATE FOR OBJECT RELOCATION IN OUTER SPACE Mr. Hasani Burns Advisor: Dr. Chutima Boonthum-Denecke Hampton University Abstract This research explores the performance
EXPLORING THE PERFORMANCE OF THE IROBOT CREATE FOR OBJECT RELOCATION IN OUTER SPACE Mr. Hasani Burns Advisor: Dr. Chutima Boonthum-Denecke Hampton University Abstract This research explores the performance
Integration of a real-time video grabber component with the open source image-guided surgery toolkit IGSTK
 Integration of a real-time video grabber component with the open source image-guided surgery toolkit IGSTK Ole Vegard Solberg* a,b, Geir-Arne Tangen a, Frank Lindseth a, Torleif Sandnes a, Andinet A. Enquobahrie
Integration of a real-time video grabber component with the open source image-guided surgery toolkit IGSTK Ole Vegard Solberg* a,b, Geir-Arne Tangen a, Frank Lindseth a, Torleif Sandnes a, Andinet A. Enquobahrie