Balancing Safety and Cost in Robotically Assisted Surgery
|
|
|
- Aileen Ross
- 5 years ago
- Views:
Transcription
1 Balancing Safety and Cost in Robotically Assisted Surgery IROS 2011 LOUAI ADHAMI, PHD










2 Thank yous 2 ChIR & XirTek INRIA Intuitive Surgical France & USA HEGP & A. Carpentier The RNTS, RNRT SimQuest
3 Outline 3 Motivation Quick Outline of XirTek Safety vs. Cost: XirTek step-by-step Safety vs. Cost: Further examples from Immersion Medical and SimQuest Conclusion

4 Motivation 4 Example 1: Who knows CPR? $90-5 hrs Available everywhere Example 2: The dilemma: Humans as absolute value vs. What it takes to save/help someone
5 Chir/XirTek What is was 5 Perception Port Placement Robot Positionning Validation Simulation Transfer Monitoring Analysis
6 Xirtek: How does it increase safety? 6 Prepare through Planning Port placement Pose planning Prevent through V & V Formal verification Result validation Practice through Simulation Pre-empt during Monitoring
7 Xirtek What it became 7 Project Chir went in a one year evaluation to assess Xirtek s feasibility The conclusion was that is was too soon for Xirtek Why too soon? All the technology was available Enough customers were identified Why; really? Final bottom line after the whole chain was negative (at least at the time)





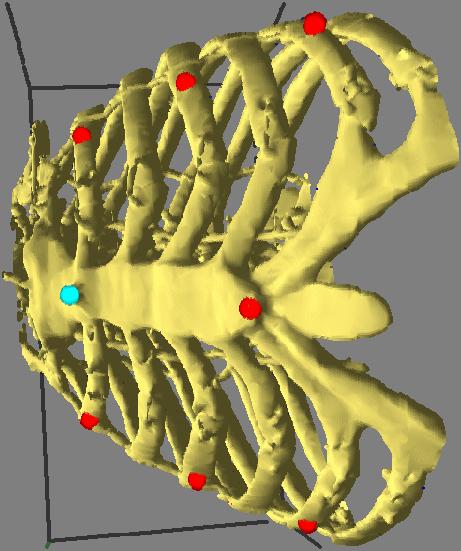
8 Chir: Port Placement 8 Problem Statement: Compute optimal incision sites based on surgeon requirements and robot specs All ports must be admissible No internal collisions Triplet optimization based on: Surgeon s requirements Robot limit (max dexterity)
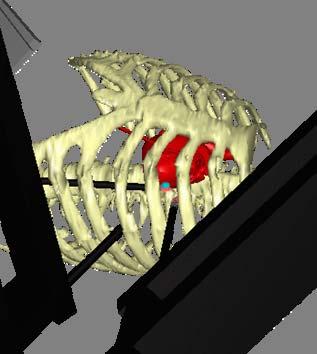
9 Chir: Port Placement Cost 9 CT scans Complete torso Injected and synchronized heart image Coronarography (optional) Segmentation Automatic Manual UI Selecting the targets Choosing solution


 such that:")



10 Chir: Pose Planning 10 Problem statement Position a robot in a way to achieve a collision free path g(t) such that: Incision remote centers Maximize a clearance measure F Active Passive DOFs Contraints x-y- 6 passive 4 active





11 Chir: Transfer 11 Incision sites Robot pose
12 Chir: Transfer & Monitoring Cost Registration of pre / intra operative models 3d reconstruction Port placement Robot as pointing device Robot pose matching GUI Required setup Robot API 1-2 laptops Stereo system 12
 Formal Verification Intra-operative steps were validated")
13 Chir: Verification Cost 13 Algorithmic Verification Took 1 post-doc 3 months to formally verify 1 collision detection function (using Coq) Formal Verification Intra-operative steps were validated using XEVE


14 Further Examples: IMMR LapVR Handles 14 Handle electrocuted a client Redesigned the wiring Cost = Law suit Handles were burning the clients Changed the enclosing to plastic Cost = Loosing clients Handles were burning out Removed the haptics despite their recognized benefits Cost = COGS + less repairs
 Close coordination with Novint was")
15 Further Examples: SimQuest s BurrHole 15 Requirements Deliver very high forces (20N) Low cost without compromising Reliability or Safety Solution Used custom made version of commercially available Novint devices (2 Falcons) Close coordination with Novint was needed
16 Conclusion 16 Should not idealize safety yet should not lower our standards Work with a given or reasonable cost mind to achieve an explicit level of safety Neglecting the cost could kill your project/product this doesn t mean it s an excuse to neglect safety
17 References Publications 17 L. Adhami and È. Coste-Manière. A versatile system for computer integrated mini-invasive robotic surgery. In Medical Image Computing and Computer Assisted Intervention (MICCAI'02), Tokyo, Japan, Oct L. Adhami and È. Coste-Manière. Optimal planning for minimally invasive surgical robots. IEEE Transactions on Robotics and Automation: Special Issue on Medical Robotics, 19(5): , È. Coste-Manière, L. Adhami, F. Mourgues, and A. Carpentier. Planning, simulation, and augmented reality for robotic cardiac procedures: The stars system of the chir team. Seminars in Thoracic and Cardiovascular Surgery, 15(2), April Coste-maniere, E. Adhami, L. Boissonnat, J.-D. Carpentier, A. Guthart, G. Methods and Apparatus for Surgical Planning. US Patent Intuitive Surgical Inc & INRIA Roquencourt Adhami, L. Falk, R. Ullrich, C. Bi-Directional Communication of Simulation Information. US Patent Immersion Cooporation. Sites www-sop.inria.fr/chir (frozen)
SMart wearable Robotic Teleoperated surgery
 SMart wearable Robotic Teleoperated surgery This project has received funding from the European Union s Horizon 2020 research and innovation programme under grant agreement No 732515 Context Minimally
SMart wearable Robotic Teleoperated surgery This project has received funding from the European Union s Horizon 2020 research and innovation programme under grant agreement No 732515 Context Minimally
Medical robotics and Image Guided Therapy (IGT) Bogdan M. Maris, PhD Temporary Assistant Professor
 Bogdan M. Maris, PhD Temporary Assistant Professor") Medical robotics and Image Guided Therapy (IGT) Bogdan M. Maris, PhD Temporary Assistant Professor E-mail bogdan.maris@univr.it Medical Robotics History, current and future applications Robots are Accurate
Medical robotics and Image Guided Therapy (IGT) Bogdan M. Maris, PhD Temporary Assistant Professor E-mail bogdan.maris@univr.it Medical Robotics History, current and future applications Robots are Accurate
Small Occupancy Robotic Mechanisms for Endoscopic Surgery
 Small Occupancy Robotic Mechanisms for Endoscopic Surgery Yuki Kobayashi, Shingo Chiyoda, Kouichi Watabe, Masafumi Okada, and Yoshihiko Nakamura Department of Mechano-Informatics, The University of Tokyo,
Small Occupancy Robotic Mechanisms for Endoscopic Surgery Yuki Kobayashi, Shingo Chiyoda, Kouichi Watabe, Masafumi Okada, and Yoshihiko Nakamura Department of Mechano-Informatics, The University of Tokyo,
HUMAN Robot Cooperation Techniques in Surgery
 HUMAN Robot Cooperation Techniques in Surgery Alícia Casals Institute for Bioengineering of Catalonia (IBEC), Universitat Politècnica de Catalunya (UPC), Barcelona, Spain alicia.casals@upc.edu Keywords:
HUMAN Robot Cooperation Techniques in Surgery Alícia Casals Institute for Bioengineering of Catalonia (IBEC), Universitat Politècnica de Catalunya (UPC), Barcelona, Spain alicia.casals@upc.edu Keywords:
Università di Roma La Sapienza. Medical Robotics. A Teleoperation System for Research in MIRS. Marilena Vendittelli
 Università di Roma La Sapienza Medical Robotics A Teleoperation System for Research in MIRS Marilena Vendittelli the DLR teleoperation system slave three versatile robots MIRO light-weight: weight < 10
Università di Roma La Sapienza Medical Robotics A Teleoperation System for Research in MIRS Marilena Vendittelli the DLR teleoperation system slave three versatile robots MIRO light-weight: weight < 10
Computer Assisted Medical Interventions
 Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Robots in the Field of Medicine
 Robots in the Field of Medicine Austin Gillis and Peter Demirdjian Malden Catholic High School 1 Pioneers Robots in the Field of Medicine The use of robots in medicine is where it is today because of four
Robots in the Field of Medicine Austin Gillis and Peter Demirdjian Malden Catholic High School 1 Pioneers Robots in the Field of Medicine The use of robots in medicine is where it is today because of four
Robotic System Simulation and Modeling Stefan Jörg Robotic and Mechatronic Center
 Robotic System Simulation and ing Stefan Jörg Robotic and Mechatronic Center Outline Introduction The SAFROS Robotic System Simulator Robotic System ing Conclusions Folie 2 DLR s Mirosurge: A versatile
Robotic System Simulation and ing Stefan Jörg Robotic and Mechatronic Center Outline Introduction The SAFROS Robotic System Simulator Robotic System ing Conclusions Folie 2 DLR s Mirosurge: A versatile
Easy Robot Software. And the MoveIt! Setup Assistant 2.0. Dave Coleman, PhD davetcoleman
 Easy Robot Software And the MoveIt! Setup Assistant 2.0 Reducing the Barrier to Entry of Complex Robotic Software: a MoveIt! Case Study David Coleman, Ioan Sucan, Sachin Chitta, Nikolaus Correll Journal
Easy Robot Software And the MoveIt! Setup Assistant 2.0 Reducing the Barrier to Entry of Complex Robotic Software: a MoveIt! Case Study David Coleman, Ioan Sucan, Sachin Chitta, Nikolaus Correll Journal
Medical Robotics. Part II: SURGICAL ROBOTICS
 5 Medical Robotics Part II: SURGICAL ROBOTICS In the last decade, surgery and robotics have reached a maturity that has allowed them to be safely assimilated to create a new kind of operating room. This
5 Medical Robotics Part II: SURGICAL ROBOTICS In the last decade, surgery and robotics have reached a maturity that has allowed them to be safely assimilated to create a new kind of operating room. This
Autonomous Surgical Robotics
 Nicolás Pérez de Olaguer Santamaría Autonomous Surgical Robotics 1 / 29 MIN Faculty Department of Informatics Autonomous Surgical Robotics Nicolás Pérez de Olaguer Santamaría University of Hamburg Faculty
Nicolás Pérez de Olaguer Santamaría Autonomous Surgical Robotics 1 / 29 MIN Faculty Department of Informatics Autonomous Surgical Robotics Nicolás Pérez de Olaguer Santamaría University of Hamburg Faculty
Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery
 Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery Claudio Pacchierotti Domenico Prattichizzo Katherine J. Kuchenbecker Motivation Despite its expected clinical
Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery Claudio Pacchierotti Domenico Prattichizzo Katherine J. Kuchenbecker Motivation Despite its expected clinical
Evaluation of Haptic Virtual Fixtures in Psychomotor Skill Development for Robotic Surgical Training
 Department of Electronics, Information and Bioengineering Neuroengineering and medical robotics Lab Evaluation of Haptic Virtual Fixtures in Psychomotor Skill Development for Robotic Surgical Training
Department of Electronics, Information and Bioengineering Neuroengineering and medical robotics Lab Evaluation of Haptic Virtual Fixtures in Psychomotor Skill Development for Robotic Surgical Training
BodyViz fact sheet. BodyViz 2321 North Loop Drive, Suite 110 Ames, IA x555 www. bodyviz.com
 BodyViz fact sheet BodyViz, the company, was established in 2007 at the Iowa State University Research Park in Ames, Iowa. It was created by ISU s Virtual Reality Applications Center Director James Oliver,
BodyViz fact sheet BodyViz, the company, was established in 2007 at the Iowa State University Research Park in Ames, Iowa. It was created by ISU s Virtual Reality Applications Center Director James Oliver,
Real-time Adaptive Robot Motion Planning in Unknown and Unpredictable Environments
 Real-time Adaptive Robot Motion Planning in Unknown and Unpredictable Environments IMI Lab, Dept. of Computer Science University of North Carolina Charlotte Outline Problem and Context Basic RAMP Framework
Real-time Adaptive Robot Motion Planning in Unknown and Unpredictable Environments IMI Lab, Dept. of Computer Science University of North Carolina Charlotte Outline Problem and Context Basic RAMP Framework
Differences in Fitts Law Task Performance Based on Environment Scaling
 Differences in Fitts Law Task Performance Based on Environment Scaling Gregory S. Lee and Bhavani Thuraisingham Department of Computer Science University of Texas at Dallas 800 West Campbell Road Richardson,
Differences in Fitts Law Task Performance Based on Environment Scaling Gregory S. Lee and Bhavani Thuraisingham Department of Computer Science University of Texas at Dallas 800 West Campbell Road Richardson,
Scopis Hybrid Navigation with Augmented Reality
 Scopis Hybrid Navigation with Augmented Reality Intelligent navigation systems for head surgery www.scopis.com Scopis Hybrid Navigation One System. Optical and electromagnetic measurement technology. As
Scopis Hybrid Navigation with Augmented Reality Intelligent navigation systems for head surgery www.scopis.com Scopis Hybrid Navigation One System. Optical and electromagnetic measurement technology. As
Current Status and Future of Medical Virtual Reality
 2011.08.16 Medical VR Current Status and Future of Medical Virtual Reality Naoto KUME, Ph.D. Assistant Professor of Kyoto University Hospital 1. History of Medical Virtual Reality Virtual reality (VR)
2011.08.16 Medical VR Current Status and Future of Medical Virtual Reality Naoto KUME, Ph.D. Assistant Professor of Kyoto University Hospital 1. History of Medical Virtual Reality Virtual reality (VR)
Stereoscopic Augmented Reality System for Computer Assisted Surgery
 Marc Liévin and Erwin Keeve Research center c a e s a r, Center of Advanced European Studies and Research, Surgical Simulation and Navigation Group, Friedensplatz 16, 53111 Bonn, Germany. A first architecture
Marc Liévin and Erwin Keeve Research center c a e s a r, Center of Advanced European Studies and Research, Surgical Simulation and Navigation Group, Friedensplatz 16, 53111 Bonn, Germany. A first architecture
Communication Requirements of VR & Telemedicine
 Communication Requirements of VR & Telemedicine Henry Fuchs UNC Chapel Hill 3 Nov 2016 NSF Workshop on Ultra-Low Latencies in Wireless Networks Support: NSF grants IIS-CHS-1423059 & HCC-CGV-1319567, CISCO,
Communication Requirements of VR & Telemedicine Henry Fuchs UNC Chapel Hill 3 Nov 2016 NSF Workshop on Ultra-Low Latencies in Wireless Networks Support: NSF grants IIS-CHS-1423059 & HCC-CGV-1319567, CISCO,
CS277 - Experimental Haptics Lecture 1. Introduction to Haptics
 CS277 - Experimental Haptics Lecture 1 Introduction to Haptics Haptic Interfaces Enables physical interaction with virtual objects Haptic Rendering Potential Fields Polygonal Meshes Implicit Surfaces Volumetric
CS277 - Experimental Haptics Lecture 1 Introduction to Haptics Haptic Interfaces Enables physical interaction with virtual objects Haptic Rendering Potential Fields Polygonal Meshes Implicit Surfaces Volumetric
Towards robotic heart surgery: Introduction of autonomous procedures into an experimental surgical telemanipulator system
 74 ORIGINAL ARTICLE Towards robotic heart surgery: Introduction of autonomous procedures into an experimental surgical telemanipulator system R Bauernschmitt*, E U Schirmbeck*, A Knoll, H Mayer, I Nagy,
74 ORIGINAL ARTICLE Towards robotic heart surgery: Introduction of autonomous procedures into an experimental surgical telemanipulator system R Bauernschmitt*, E U Schirmbeck*, A Knoll, H Mayer, I Nagy,
Force feedback interfaces & applications
 Force feedback interfaces & applications Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jukka Raisamo,
Force feedback interfaces & applications Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jukka Raisamo,
Peter Berkelman. ACHI/DigitalWorld
 Magnetic Levitation Haptic Peter Berkelman ACHI/DigitalWorld February 25, 2013 Outline: Haptics - Force Feedback Sample devices: Phantoms, Novint Falcon, Force Dimension Inertia, friction, hysteresis/backlash
Magnetic Levitation Haptic Peter Berkelman ACHI/DigitalWorld February 25, 2013 Outline: Haptics - Force Feedback Sample devices: Phantoms, Novint Falcon, Force Dimension Inertia, friction, hysteresis/backlash
2. Introduction to Computer Haptics
 2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
Frequently Asked Question on Isolated Power Supply(IPS)
") Frequently Asked Question on Isolated Power Supply(IPS) Q: What is an IPS? A: IPS is called as Isolated Power Supply or System and is used in a Hospital to ensure safe power supply to OT Operation Theaters
Frequently Asked Question on Isolated Power Supply(IPS) Q: What is an IPS? A: IPS is called as Isolated Power Supply or System and is used in a Hospital to ensure safe power supply to OT Operation Theaters
Novel machine interface for scaled telesurgery
 Novel machine interface for scaled telesurgery S. Clanton, D. Wang, Y. Matsuoka, D. Shelton, G. Stetten SPIE Medical Imaging, vol. 5367, pp. 697-704. San Diego, Feb. 2004. A Novel Machine Interface for
Novel machine interface for scaled telesurgery S. Clanton, D. Wang, Y. Matsuoka, D. Shelton, G. Stetten SPIE Medical Imaging, vol. 5367, pp. 697-704. San Diego, Feb. 2004. A Novel Machine Interface for
Maneesh Dewan. Prepared on: April 11, 2007
 Maneesh Dewan maneesh@cs.jhu.edu www.cs.jhu.edu/~maneesh 307, E. University Parkway, 3400 N. Charles Street, Baltimore, MD 21218. NEB B28, Baltimore, MD 21218. Phone: (410) 900 8804 (C) Phone: (410) 516
Maneesh Dewan maneesh@cs.jhu.edu www.cs.jhu.edu/~maneesh 307, E. University Parkway, 3400 N. Charles Street, Baltimore, MD 21218. NEB B28, Baltimore, MD 21218. Phone: (410) 900 8804 (C) Phone: (410) 516
Computer Haptics and Applications
 Computer Haptics and Applications EURON Summer School 2003 Cagatay Basdogan, Ph.D. College of Engineering Koc University, Istanbul, 80910 (http://network.ku.edu.tr/~cbasdogan) Resources: EURON Summer School
Computer Haptics and Applications EURON Summer School 2003 Cagatay Basdogan, Ph.D. College of Engineering Koc University, Istanbul, 80910 (http://network.ku.edu.tr/~cbasdogan) Resources: EURON Summer School
Image Guided Robotic Assisted Surgical Training System using LabVIEW and CompactRIO
 Image Guided Robotic Assisted Surgical Training System using LabVIEW and CompactRIO Weimin Huang 1, Tao Yang 1, Liang Jing Yang 2, Chee Kong Chui 2, Jimmy Liu 1, Jiayin Zhou 1, Jing Zhang 1, Yi Su 3, Stephen
Image Guided Robotic Assisted Surgical Training System using LabVIEW and CompactRIO Weimin Huang 1, Tao Yang 1, Liang Jing Yang 2, Chee Kong Chui 2, Jimmy Liu 1, Jiayin Zhou 1, Jing Zhang 1, Yi Su 3, Stephen
Application of Force Feedback in Robot Assisted Minimally Invasive Surgery
 Application of Force Feedback in Robot Assisted Minimally Invasive Surgery István Nagy, Hermann Mayer, and Alois Knoll Technische Universität München, 85748 Garching, Germany, {nagy mayerh knoll}@in.tum.de,
Application of Force Feedback in Robot Assisted Minimally Invasive Surgery István Nagy, Hermann Mayer, and Alois Knoll Technische Universität München, 85748 Garching, Germany, {nagy mayerh knoll}@in.tum.de,
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute State one reason for investigating and building humanoid robot (4 pts) List two
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute State one reason for investigating and building humanoid robot (4 pts) List two
Wednesday, October 29, :00-04:00pm EB: 3546D. TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof.
 Wednesday, October 29, 2014 02:00-04:00pm EB: 3546D TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof. Ning Xi ABSTRACT Mobile manipulators provide larger working spaces and more flexibility
Wednesday, October 29, 2014 02:00-04:00pm EB: 3546D TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof. Ning Xi ABSTRACT Mobile manipulators provide larger working spaces and more flexibility
Haptic Feedback in Laparoscopic and Robotic Surgery
 Haptic Feedback in Laparoscopic and Robotic Surgery Dr. Warren Grundfest Professor Bioengineering, Electrical Engineering & Surgery UCLA, Los Angeles, California Acknowledgment This Presentation & Research
Haptic Feedback in Laparoscopic and Robotic Surgery Dr. Warren Grundfest Professor Bioengineering, Electrical Engineering & Surgery UCLA, Los Angeles, California Acknowledgment This Presentation & Research
Virtual Co-Location for Crime Scene Investigation and Going Beyond
 Virtual Co-Location for Crime Scene Investigation and Going Beyond Stephan Lukosch Faculty of Technology, Policy and Management, Systems Engineering Section Delft University of Technology Challenge the
Virtual Co-Location for Crime Scene Investigation and Going Beyond Stephan Lukosch Faculty of Technology, Policy and Management, Systems Engineering Section Delft University of Technology Challenge the
Surgical robot simulation with BBZ console
 Review Article on Thoracic Surgery Surgical robot simulation with BBZ console Francesco Bovo 1, Giacomo De Rossi 2, Francesco Visentin 2,3 1 BBZ srl, Verona, Italy; 2 Department of Computer Science, Università
Review Article on Thoracic Surgery Surgical robot simulation with BBZ console Francesco Bovo 1, Giacomo De Rossi 2, Francesco Visentin 2,3 1 BBZ srl, Verona, Italy; 2 Department of Computer Science, Università
5HDO 7LPH 6XUJLFDO 6LPXODWLRQ ZLWK +DSWLF 6HQVDWLRQ DV &ROODERUDWHG :RUNV EHWZHHQ -DSDQ DQG *HUPDQ\
 nsuzuki@jikei.ac.jp 1016 N. Suzuki et al. 1). The system should provide a design for the user and determine surgical procedures based on 3D model reconstructed from the patient's data. 2). The system must
nsuzuki@jikei.ac.jp 1016 N. Suzuki et al. 1). The system should provide a design for the user and determine surgical procedures based on 3D model reconstructed from the patient's data. 2). The system must
Transforming Surgical Robotics. 34 th Annual J.P. Morgan Healthcare Conference January 14, 2016
 1 Transforming Surgical Robotics 34 th Annual J.P. Morgan Healthcare Conference January 14, 2016 Forward Looking Statements 2 This presentation includes statements relating to TransEnterix s current regulatory
1 Transforming Surgical Robotics 34 th Annual J.P. Morgan Healthcare Conference January 14, 2016 Forward Looking Statements 2 This presentation includes statements relating to TransEnterix s current regulatory
3D Ultrasound-Guided Motion Compensation System for Beating Heart Mitral Valve Repair
 3D Ultrasound-Guided Motion Compensation System for Beating Heart Mitral Valve Repair Shelten G. Yuen, Samuel B. Kesner, Nikolay V. Vasilyev 2, Pedro J. Del Nido 2, and Robert D. Howe,3 Harvard School
3D Ultrasound-Guided Motion Compensation System for Beating Heart Mitral Valve Repair Shelten G. Yuen, Samuel B. Kesner, Nikolay V. Vasilyev 2, Pedro J. Del Nido 2, and Robert D. Howe,3 Harvard School
Haptic Reproduction and Interactive Visualization of a Beating Heart Based on Cardiac Morphology
 MEDINFO 2001 V. Patel et al. (Eds) Amsterdam: IOS Press 2001 IMIA. All rights reserved Haptic Reproduction and Interactive Visualization of a Beating Heart Based on Cardiac Morphology Megumi Nakao a, Masaru
MEDINFO 2001 V. Patel et al. (Eds) Amsterdam: IOS Press 2001 IMIA. All rights reserved Haptic Reproduction and Interactive Visualization of a Beating Heart Based on Cardiac Morphology Megumi Nakao a, Masaru
Improving Depth Perception in Medical AR
 Improving Depth Perception in Medical AR A Virtual Vision Panel to the Inside of the Patient Christoph Bichlmeier 1, Tobias Sielhorst 1, Sandro M. Heining 2, Nassir Navab 1 1 Chair for Computer Aided Medical
Improving Depth Perception in Medical AR A Virtual Vision Panel to the Inside of the Patient Christoph Bichlmeier 1, Tobias Sielhorst 1, Sandro M. Heining 2, Nassir Navab 1 1 Chair for Computer Aided Medical
A Feasibility Study of Time-Domain Passivity Approach for Bilateral Teleoperation of Mobile Manipulator
 International Conference on Control, Automation and Systems 2008 Oct. 14-17, 2008 in COEX, Seoul, Korea A Feasibility Study of Time-Domain Passivity Approach for Bilateral Teleoperation of Mobile Manipulator
International Conference on Control, Automation and Systems 2008 Oct. 14-17, 2008 in COEX, Seoul, Korea A Feasibility Study of Time-Domain Passivity Approach for Bilateral Teleoperation of Mobile Manipulator
HeroX - Untethered VR Training in Sync'ed Physical Spaces
 Page 1 of 6 HeroX - Untethered VR Training in Sync'ed Physical Spaces Above and Beyond - Integrating Robotics In previous research work I experimented with multiple robots remotely controlled by people
Page 1 of 6 HeroX - Untethered VR Training in Sync'ed Physical Spaces Above and Beyond - Integrating Robotics In previous research work I experimented with multiple robots remotely controlled by people
Digital Reality TM changes everything
 F E B R U A R Y 2 0 1 8 Digital Reality TM changes everything Step into the future What are we talking about? Virtual Reality VR is an entirely digital world that completely immerses the user in an environment
F E B R U A R Y 2 0 1 8 Digital Reality TM changes everything Step into the future What are we talking about? Virtual Reality VR is an entirely digital world that completely immerses the user in an environment
Methods for Haptic Feedback in Teleoperated Robotic Surgery
 Young Group 5 1 Methods for Haptic Feedback in Teleoperated Robotic Surgery Paper Review Jessie Young Group 5: Haptic Interface for Surgical Manipulator System March 12, 2012 Paper Selection: A. M. Okamura.
Young Group 5 1 Methods for Haptic Feedback in Teleoperated Robotic Surgery Paper Review Jessie Young Group 5: Haptic Interface for Surgical Manipulator System March 12, 2012 Paper Selection: A. M. Okamura.
Planning and Real Time Control of a Minimally Invasive Robotic Surgery System
 Planning and Real Time Control of a Minimally Invasive Robotic Surgery System Andreas Tobergte, Rainer Konietschke, and Gerd Hirzinger Abstract This paper introduces the planning and control software of
Planning and Real Time Control of a Minimally Invasive Robotic Surgery System Andreas Tobergte, Rainer Konietschke, and Gerd Hirzinger Abstract This paper introduces the planning and control software of
Parallax-Free Long Bone X-ray Image Stitching
 Parallax-Free Long Bone X-ray Image Stitching Lejing Wang 1,JoergTraub 1, Simon Weidert 2, Sandro Michael Heining 2, Ekkehard Euler 2, and Nassir Navab 1 1 Chair for Computer Aided Medical Procedures (CAMP),
Parallax-Free Long Bone X-ray Image Stitching Lejing Wang 1,JoergTraub 1, Simon Weidert 2, Sandro Michael Heining 2, Ekkehard Euler 2, and Nassir Navab 1 1 Chair for Computer Aided Medical Procedures (CAMP),
Can technological solutions support user experience, learning, and operation outcome in robotic surgery?
 VTT TECHNICAL RESEARCH CENTRE OF FINLAND LTD Can technological solutions support user experience, learning, and operation outcome in robotic surgery? ERF2016 Session Image Guided Robotic Surgery and Interventions
VTT TECHNICAL RESEARCH CENTRE OF FINLAND LTD Can technological solutions support user experience, learning, and operation outcome in robotic surgery? ERF2016 Session Image Guided Robotic Surgery and Interventions
Haptic Virtual Fixtures for Robot-Assisted Manipulation
 Haptic Virtual Fixtures for Robot-Assisted Manipulation Jake J. Abbott, Panadda Marayong, and Allison M. Okamura Department of Mechanical Engineering, The Johns Hopkins University {jake.abbott, pmarayong,
Haptic Virtual Fixtures for Robot-Assisted Manipulation Jake J. Abbott, Panadda Marayong, and Allison M. Okamura Department of Mechanical Engineering, The Johns Hopkins University {jake.abbott, pmarayong,
Job Description. Commitment: Must be available to work full-time hours, M-F for weeks beginning Summer of 2018.
 Research Intern Director of Research We are seeking a summer intern to support the team to develop prototype 3D sensing systems based on state-of-the-art sensing technologies along with computer vision
Research Intern Director of Research We are seeking a summer intern to support the team to develop prototype 3D sensing systems based on state-of-the-art sensing technologies along with computer vision
Development of a Master Slave Combined Manipulator for Laparoscopic Surgery
 Development of a Master Slave Combined Manipulator for Laparoscopic Surgery Functional Model and Its Evaluation Makoto Jinno 1, Nobuto Matsuhira 1, Takamitsu Sunaoshi 1 Takehiro Hato 1, Toyomi Miyagawa
Development of a Master Slave Combined Manipulator for Laparoscopic Surgery Functional Model and Its Evaluation Makoto Jinno 1, Nobuto Matsuhira 1, Takamitsu Sunaoshi 1 Takehiro Hato 1, Toyomi Miyagawa
New Structure for IGT Tracking Devices: Simple Integration in External Projects
 New Structure for IGT Tracking Devices: Simple Integration in External Projects Esther Wild and Alfred Franz Computer-assisted Interventions (DKFZ) Intraoperative registration with colored fiducials Baumhauer
New Structure for IGT Tracking Devices: Simple Integration in External Projects Esther Wild and Alfred Franz Computer-assisted Interventions (DKFZ) Intraoperative registration with colored fiducials Baumhauer
Virtual and Augmented Reality techniques embedded and based on a Operative Microscope. Training for Neurosurgery.
 Virtual and Augmented Reality techniques embedded and based on a Operative Microscope. Training for Neurosurgery. 1 M. Aschke 1, M.Ciucci 1,J.Raczkowsky 1, R.Wirtz 2, H. Wörn 1 1 IPR, Institute for Process
Virtual and Augmented Reality techniques embedded and based on a Operative Microscope. Training for Neurosurgery. 1 M. Aschke 1, M.Ciucci 1,J.Raczkowsky 1, R.Wirtz 2, H. Wörn 1 1 IPR, Institute for Process
International Journal of Advanced Research in Computer Science and Software Engineering
 Volume 3, Issue 3, March 2013 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com A Study on SensAble
Volume 3, Issue 3, March 2013 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com A Study on SensAble
Measurements of the Level of Surgical Expertise Using Flight Path Analysis from da Vinci Robotic Surgical System
 Measurements of the Level of Surgical Expertise Using Flight Path Analysis from da Vinci Robotic Surgical System Lawton Verner 1, Dmitry Oleynikov, MD 1, Stephen Holtmann 1, Hani Haider, Ph D 1, Leonid
Measurements of the Level of Surgical Expertise Using Flight Path Analysis from da Vinci Robotic Surgical System Lawton Verner 1, Dmitry Oleynikov, MD 1, Stephen Holtmann 1, Hani Haider, Ph D 1, Leonid
Right Angle Screwdriver
 Right Angle Screwdriver October 12, 2009 Team: Scott Carpenter - Team Leader Chuck Donaldson - Communicator Nate Retzlaff - BWIG John McGuire - BSAC Client: Ashish Mahajan, MD Resident Plastic and Reconstructive
Right Angle Screwdriver October 12, 2009 Team: Scott Carpenter - Team Leader Chuck Donaldson - Communicator Nate Retzlaff - BWIG John McGuire - BSAC Client: Ashish Mahajan, MD Resident Plastic and Reconstructive
An Augmented Reality Application for the Enhancement of Surgical Decisions
 An Augmented Reality Application for the Enhancement of Surgical Decisions Lucio T. De Paolis, Giovanni Aloisio Department of Innovation Engineering Salento University Lecce, Italy lucio.depaolis@unisalento.it
An Augmented Reality Application for the Enhancement of Surgical Decisions Lucio T. De Paolis, Giovanni Aloisio Department of Innovation Engineering Salento University Lecce, Italy lucio.depaolis@unisalento.it
Virtual Reality as Human Interface and its application to Medical Ultrasonic diagnosis
 14 INTERNATIONAL JOURNAL OF APPLIED BIOMEDICAL ENGINEERING VOL.1, NO.1 2008 Virtual Reality as Human Interface and its application to Medical Ultrasonic diagnosis Kazuhiko Hamamoto, ABSTRACT Virtual reality
14 INTERNATIONAL JOURNAL OF APPLIED BIOMEDICAL ENGINEERING VOL.1, NO.1 2008 Virtual Reality as Human Interface and its application to Medical Ultrasonic diagnosis Kazuhiko Hamamoto, ABSTRACT Virtual reality
2D, 3D CT Intervention, and CT Fluoroscopy
 2D, 3D CT Intervention, and CT Fluoroscopy SOMATOM Definition, Definition AS, Definition Flash Answers for life. Siemens CT Vision Siemens CT Vision The justification for the existence of the entire medical
2D, 3D CT Intervention, and CT Fluoroscopy SOMATOM Definition, Definition AS, Definition Flash Answers for life. Siemens CT Vision Siemens CT Vision The justification for the existence of the entire medical
CS277 - Experimental Haptics Lecture 2. Haptic Rendering
 CS277 - Experimental Haptics Lecture 2 Haptic Rendering Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering A note on timing...
CS277 - Experimental Haptics Lecture 2 Haptic Rendering Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering A note on timing...
Computer Assisted Abdominal
 Computer Assisted Abdominal Surgery and NOTES Prof. Luc Soler, Prof. Jacques Marescaux University of Strasbourg, France In the past IRCAD Strasbourg + Taiwain More than 3.000 surgeons trained per year,,
Computer Assisted Abdominal Surgery and NOTES Prof. Luc Soler, Prof. Jacques Marescaux University of Strasbourg, France In the past IRCAD Strasbourg + Taiwain More than 3.000 surgeons trained per year,,
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
DEVELOPING SENSORS FOR SURGERY SUPPORT ROBOTS Mona Kudo
 DEVELOPING SENSORS FOR SURGERY SUPPORT ROBOTS 20328 Mona Kudo 1. INTRODUCTION Today, many kinds of surgery support robots are used in medical procedures all over economically advanced countries such as
DEVELOPING SENSORS FOR SURGERY SUPPORT ROBOTS 20328 Mona Kudo 1. INTRODUCTION Today, many kinds of surgery support robots are used in medical procedures all over economically advanced countries such as
Haptics Technologies: Bringing Touch to Multimedia
 Haptics Technologies: Bringing Touch to Multimedia C2: Haptics Applications Outline Haptic Evolution: from Psychophysics to Multimedia Haptics for Medical Applications Surgical Simulations Stroke-based
Haptics Technologies: Bringing Touch to Multimedia C2: Haptics Applications Outline Haptic Evolution: from Psychophysics to Multimedia Haptics for Medical Applications Surgical Simulations Stroke-based
Robot assisted craniofacial surgery: first clinical evaluation
 Robot assisted craniofacial surgery: first clinical evaluation C. Burghart*, R. Krempien, T. Redlich+, A. Pernozzoli+, H. Grabowski*, J. Muenchenberg*, J. Albers#, S. Haßfeld+, C. Vahl#, U. Rembold*, H.
Robot assisted craniofacial surgery: first clinical evaluation C. Burghart*, R. Krempien, T. Redlich+, A. Pernozzoli+, H. Grabowski*, J. Muenchenberg*, J. Albers#, S. Haßfeld+, C. Vahl#, U. Rembold*, H.
Touch Feedback in a Head-Mounted Display Virtual Reality through a Kinesthetic Haptic Device
 Touch Feedback in a Head-Mounted Display Virtual Reality through a Kinesthetic Haptic Device Andrew A. Stanley Stanford University Department of Mechanical Engineering astan@stanford.edu Alice X. Wu Stanford
Touch Feedback in a Head-Mounted Display Virtual Reality through a Kinesthetic Haptic Device Andrew A. Stanley Stanford University Department of Mechanical Engineering astan@stanford.edu Alice X. Wu Stanford
VR-OOS System Architecture Workshop zu interaktiven VR-Technologien für On-Orbit Servicing
 www.dlr.de Chart 1 > VR-OOS System Architecture > Robin Wolff VR-OOS Workshop 09/10.10.2012 VR-OOS System Architecture Workshop zu interaktiven VR-Technologien für On-Orbit Servicing Robin Wolff DLR, and
www.dlr.de Chart 1 > VR-OOS System Architecture > Robin Wolff VR-OOS Workshop 09/10.10.2012 VR-OOS System Architecture Workshop zu interaktiven VR-Technologien für On-Orbit Servicing Robin Wolff DLR, and
Capability for Collision Avoidance of Different User Avatars in Virtual Reality
 Capability for Collision Avoidance of Different User Avatars in Virtual Reality Adrian H. Hoppe, Roland Reeb, Florian van de Camp, and Rainer Stiefelhagen Karlsruhe Institute of Technology (KIT) {adrian.hoppe,rainer.stiefelhagen}@kit.edu,
Capability for Collision Avoidance of Different User Avatars in Virtual Reality Adrian H. Hoppe, Roland Reeb, Florian van de Camp, and Rainer Stiefelhagen Karlsruhe Institute of Technology (KIT) {adrian.hoppe,rainer.stiefelhagen}@kit.edu,
RENDERING MEDICAL INTERVENTIONS VIRTUAL AND ROBOT
 RENDERING MEDICAL INTERVENTIONS VIRTUAL AND ROBOT Lavinia Ioana Săbăilă Doina Mortoiu Theoharis Babanatsas Aurel Vlaicu Arad University, e-mail: lavyy_99@yahoo.com Aurel Vlaicu Arad University, e mail:
RENDERING MEDICAL INTERVENTIONS VIRTUAL AND ROBOT Lavinia Ioana Săbăilă Doina Mortoiu Theoharis Babanatsas Aurel Vlaicu Arad University, e-mail: lavyy_99@yahoo.com Aurel Vlaicu Arad University, e mail:
FALL 2014, Issue No. 32 ROBOTICS AT OUR FINGERTIPS
 FALL 2014, Issue No. 32 ROBOTICS AT OUR FINGERTIPS FALL 2014 Issue No. 32 12 CYBERSECURITY SOLUTION NSF taps UCLA Engineering to take lead in encryption research. Cover Photo: Joanne Leung 6MAN AND MACHINE
FALL 2014, Issue No. 32 ROBOTICS AT OUR FINGERTIPS FALL 2014 Issue No. 32 12 CYBERSECURITY SOLUTION NSF taps UCLA Engineering to take lead in encryption research. Cover Photo: Joanne Leung 6MAN AND MACHINE
Maximum Performance, Minimum Space
 TECHNOLOGY HISTORY For over 130 years, Toshiba has been a world leader in developing technology to improve the quality of life. Our 50,000 global patents demonstrate a long, rich history of leading innovation.
TECHNOLOGY HISTORY For over 130 years, Toshiba has been a world leader in developing technology to improve the quality of life. Our 50,000 global patents demonstrate a long, rich history of leading innovation.
TREND OF SURGICAL ROBOT TECHNOLOGY AND ITS INDUSTRIAL OUTLOOK
 TREND OF SURGICAL ROBOT TECHNOLOGY AND ITS INDUSTRIAL OUTLOOK BYUNG-JU YI Electronic Systems Engineering Department, Hanyang University, Korea E-mail: bj@hanyang.ac.kr Abstract - Since the launch of the
TREND OF SURGICAL ROBOT TECHNOLOGY AND ITS INDUSTRIAL OUTLOOK BYUNG-JU YI Electronic Systems Engineering Department, Hanyang University, Korea E-mail: bj@hanyang.ac.kr Abstract - Since the launch of the
Information and Program
 Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Medical Robots. Healing and Helping. Monika and Wen
 Medical Robots Healing and Helping Monika and Wen Index Definition My definition For what? History Other facts C' Arm Telediagnosis MRI Robitom Nursery Robotic Surgery Telesurgery Advantages & Disadvantages
Medical Robots Healing and Helping Monika and Wen Index Definition My definition For what? History Other facts C' Arm Telediagnosis MRI Robitom Nursery Robotic Surgery Telesurgery Advantages & Disadvantages
Health Care Analytics: Driving Innovation
 Health Care Analytics: Driving Innovation Jonathan Woodson, MD, MSS, FACS Director, Institute for Health System Innovation and Policy jwoodson@bu.edu Driving Innovation in Health Care 2 Organizational
Health Care Analytics: Driving Innovation Jonathan Woodson, MD, MSS, FACS Director, Institute for Health System Innovation and Policy jwoodson@bu.edu Driving Innovation in Health Care 2 Organizational
Surgical Assist Devices & Systems aka Surgical Robots
 Surgical Assist Devices & Systems aka Surgical Robots D. J. McMahon 150125 rev cewood 2018-01-19 Key Points Surgical Assist Devices & Systems: Understand why the popular name robot isn t accurate for Surgical
Surgical Assist Devices & Systems aka Surgical Robots D. J. McMahon 150125 rev cewood 2018-01-19 Key Points Surgical Assist Devices & Systems: Understand why the popular name robot isn t accurate for Surgical
Realistic Force Reflection in the Spine Biopsy Simulator
 Realistic Force Reflection in the Spine Biopsy Simulator Dong-Soo Kwon*, Ki-uk Kyung*, Sung Min Kwon**, Jong Beom Ra**, Hyun Wook Park** Heung Sik Kang***, Jianchao Zeng****, and Kevin R Cleary**** * Dept.
Realistic Force Reflection in the Spine Biopsy Simulator Dong-Soo Kwon*, Ki-uk Kyung*, Sung Min Kwon**, Jong Beom Ra**, Hyun Wook Park** Heung Sik Kang***, Jianchao Zeng****, and Kevin R Cleary**** * Dept.
ience e Schoo School of Computer Science Bangor University
 ience e Schoo ol of Com mpute er Sc Visual Computing in Medicine The Bangor Perspective School of Computer Science Bangor University Pryn hwn da Croeso y RIVIC am Prifysgol Abertawe Siarad Cymraeg? Schoo
ience e Schoo ol of Com mpute er Sc Visual Computing in Medicine The Bangor Perspective School of Computer Science Bangor University Pryn hwn da Croeso y RIVIC am Prifysgol Abertawe Siarad Cymraeg? Schoo
FORCE FEEDBACK. Roope Raisamo
 FORCE FEEDBACK Roope Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere, Finland Outline Force feedback interfaces
FORCE FEEDBACK Roope Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere, Finland Outline Force feedback interfaces
Overview of current developments in haptic APIs
 Central European Seminar on Computer Graphics for students, 2011 AUTHOR: Petr Kadleček SUPERVISOR: Petr Kmoch Overview of current developments in haptic APIs Presentation Haptics Haptic programming Haptic
Central European Seminar on Computer Graphics for students, 2011 AUTHOR: Petr Kadleček SUPERVISOR: Petr Kmoch Overview of current developments in haptic APIs Presentation Haptics Haptic programming Haptic
Testing is More Than Checking
 Testing is More Than Checking Michael Bolton DevelopSense http://www.developsense.com @michaelbolton Special acknowledgements to Cem Kaner, James Bach, and Jerry Weinberg I m Michael Bolton Not the singer.
Testing is More Than Checking Michael Bolton DevelopSense http://www.developsense.com @michaelbolton Special acknowledgements to Cem Kaner, James Bach, and Jerry Weinberg I m Michael Bolton Not the singer.
VR for Microsurgery. Design Document. Team: May1702 Client: Dr. Ben-Shlomo Advisor: Dr. Keren Website:
 VR for Microsurgery Design Document Team: May1702 Client: Dr. Ben-Shlomo Advisor: Dr. Keren Email: med-vr@iastate.edu Website: Team Members/Role: Maggie Hollander Leader Eric Edwards Communication Leader
VR for Microsurgery Design Document Team: May1702 Client: Dr. Ben-Shlomo Advisor: Dr. Keren Email: med-vr@iastate.edu Website: Team Members/Role: Maggie Hollander Leader Eric Edwards Communication Leader
Legged Capsule Robots In Medicine
 Legged Capsule Robots In Medicine Intelligent Robotics Seminar, Group TAMS, University of Hamburg Atefeh Mousavi 18/01/2016 1 Outline Motivation Medical Consideration 12-legged capsule robot and The spiral
Legged Capsule Robots In Medicine Intelligent Robotics Seminar, Group TAMS, University of Hamburg Atefeh Mousavi 18/01/2016 1 Outline Motivation Medical Consideration 12-legged capsule robot and The spiral
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS. Sergii Bykov Technical Lead Machine Learning 12 Oct 2017
 23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
Creating an Infrastructure to Address HCMDSS Challenges Introduction Enabling Technologies for Future Medical Devices
 Creating an Infrastructure to Address HCMDSS Challenges Peter Kazanzides and Russell H. Taylor Center for Computer-Integrated Surgical Systems and Technology (CISST ERC) Johns Hopkins University, Baltimore
Creating an Infrastructure to Address HCMDSS Challenges Peter Kazanzides and Russell H. Taylor Center for Computer-Integrated Surgical Systems and Technology (CISST ERC) Johns Hopkins University, Baltimore
Ubiquitous Computing Summer Episode 16: HCI. Hannes Frey and Peter Sturm University of Trier. Hannes Frey and Peter Sturm, University of Trier 1
 Episode 16: HCI Hannes Frey and Peter Sturm University of Trier University of Trier 1 Shrinking User Interface Small devices Narrow user interface Only few pixels graphical output No keyboard Mobility
Episode 16: HCI Hannes Frey and Peter Sturm University of Trier University of Trier 1 Shrinking User Interface Small devices Narrow user interface Only few pixels graphical output No keyboard Mobility
Lessons Learned in Integrating Risk Management and Process Validation
 Lessons Learned in Integrating Risk Management and Process Validation Medical Device Congress Harvard March 2007 Jim Handzo Senior Manager QA Innovative Spinal Technologies Fran Akelewicz Principal Practical
Lessons Learned in Integrating Risk Management and Process Validation Medical Device Congress Harvard March 2007 Jim Handzo Senior Manager QA Innovative Spinal Technologies Fran Akelewicz Principal Practical
Lecture 1 Introduction to Computer Vision. Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2014
 Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2014 Course Info Contact Information Room 314, Jishi Building Email: cslinzhang@tongji.edu.cn
Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2014 Course Info Contact Information Room 314, Jishi Building Email: cslinzhang@tongji.edu.cn
Using Web-Based Computer Graphics to Teach Surgery
 Using Web-Based Computer Graphics to Teach Surgery Ken Brodlie Nuha El-Khalili Ying Li School of Computer Studies University of Leeds Position Paper for GVE99, Coimbra, Portugal Surgical Training Surgical
Using Web-Based Computer Graphics to Teach Surgery Ken Brodlie Nuha El-Khalili Ying Li School of Computer Studies University of Leeds Position Paper for GVE99, Coimbra, Portugal Surgical Training Surgical
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics
 Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
Control and confidence all around. Philips EP cockpit people focused solutions for heart rhythm care
 Control and confidence all around Philips EP cockpit people focused solutions for heart rhythm care EP cockpit - brings new innovations EP cockpit simplifies your EP lab 1. Improving your EP lab working
Control and confidence all around Philips EP cockpit people focused solutions for heart rhythm care EP cockpit - brings new innovations EP cockpit simplifies your EP lab 1. Improving your EP lab working
LOOKING AHEAD: UE4 VR Roadmap. Nick Whiting Technical Director VR / AR
 LOOKING AHEAD: UE4 VR Roadmap Nick Whiting Technical Director VR / AR HEADLINE AND IMAGE LAYOUT RECENT DEVELOPMENTS RECENT DEVELOPMENTS At Epic, we drive our engine development by creating content. We
LOOKING AHEAD: UE4 VR Roadmap Nick Whiting Technical Director VR / AR HEADLINE AND IMAGE LAYOUT RECENT DEVELOPMENTS RECENT DEVELOPMENTS At Epic, we drive our engine development by creating content. We
ISPFILMQATM STATE-OF-THE-ART RADIOTHERAPY VERIFICATION SOFTWARE. Supports all major radiotherapy technologies! FilmQA TM
 FILMQA STATE-OF-THE-ART RADIOTHERAPY VERIFICATION SOFTWARE Supports all major radiotherapy technologies! FilmQA is optimized for use with Gafchromic film products, including EBT2 and RTQA2. FILMQA helps
FILMQA STATE-OF-THE-ART RADIOTHERAPY VERIFICATION SOFTWARE Supports all major radiotherapy technologies! FilmQA is optimized for use with Gafchromic film products, including EBT2 and RTQA2. FILMQA helps
Haptics CS327A
 Haptics CS327A - 217 hap tic adjective relating to the sense of touch or to the perception and manipulation of objects using the senses of touch and proprioception 1 2 Slave Master 3 Courtesy of Walischmiller
Haptics CS327A - 217 hap tic adjective relating to the sense of touch or to the perception and manipulation of objects using the senses of touch and proprioception 1 2 Slave Master 3 Courtesy of Walischmiller
INTERIOUR DESIGN USING AUGMENTED REALITY
 INTERIOUR DESIGN USING AUGMENTED REALITY Miss. Arti Yadav, Miss. Taslim Shaikh,Mr. Abdul Samad Hujare Prof: Murkute P.K.(Guide) Department of computer engineering, AAEMF S & MS, College of Engineering,
INTERIOUR DESIGN USING AUGMENTED REALITY Miss. Arti Yadav, Miss. Taslim Shaikh,Mr. Abdul Samad Hujare Prof: Murkute P.K.(Guide) Department of computer engineering, AAEMF S & MS, College of Engineering,
Bayesian Positioning in Wireless Networks using Angle of Arrival
 Bayesian Positioning in Wireless Networks using Angle of Arrival Presented by: Rich Martin Joint work with: David Madigan, Eiman Elnahrawy, Wen-Hua Ju, P. Krishnan, A.S. Krishnakumar Rutgers University
Bayesian Positioning in Wireless Networks using Angle of Arrival Presented by: Rich Martin Joint work with: David Madigan, Eiman Elnahrawy, Wen-Hua Ju, P. Krishnan, A.S. Krishnakumar Rutgers University
Computer Systems Research: Past and Future
 Computer Systems Research: Past and Future Butler Lampson People have been inventing new ideas in computer systems for nearly four decades, usually driven by Moore s law. Many of them have been spectacularly
Computer Systems Research: Past and Future Butler Lampson People have been inventing new ideas in computer systems for nearly four decades, usually driven by Moore s law. Many of them have been spectacularly
The Holographic Human for surgical navigation using Microsoft HoloLens
 EPiC Series in Engineering Volume 1, 2018, Pages 26 30 ReVo 2017: Laval Virtual ReVolution 2017 Transhumanism++ Engineering The Holographic Human for surgical navigation using Microsoft HoloLens Tomoki
EPiC Series in Engineering Volume 1, 2018, Pages 26 30 ReVo 2017: Laval Virtual ReVolution 2017 Transhumanism++ Engineering The Holographic Human for surgical navigation using Microsoft HoloLens Tomoki
NeuroSim - The Prototype of a Neurosurgical Training Simulator
 NeuroSim - The Prototype of a Neurosurgical Training Simulator Florian BEIER a,1,stephandiederich a,kirstenschmieder b and Reinhard MÄNNER a,c a Institute for Computational Medicine, University of Heidelberg
NeuroSim - The Prototype of a Neurosurgical Training Simulator Florian BEIER a,1,stephandiederich a,kirstenschmieder b and Reinhard MÄNNER a,c a Institute for Computational Medicine, University of Heidelberg
The Effect of Haptic Degrees of Freedom on Task Performance in Virtual Surgical Environments
 The Effect of Haptic Degrees of Freedom on Task Performance in Virtual Surgical Environments Jonas FORSSLUND a,1, Sonny CHAN a,1, Joshua SELESNICK b, Kenneth SALISBURY a,c, Rebeka G. SILVA d, and Nikolas
The Effect of Haptic Degrees of Freedom on Task Performance in Virtual Surgical Environments Jonas FORSSLUND a,1, Sonny CHAN a,1, Joshua SELESNICK b, Kenneth SALISBURY a,c, Rebeka G. SILVA d, and Nikolas