SMart wearable Robotic Teleoperated surgery
|
|
|
- Dortha Elliott
- 5 years ago
- Views:
Transcription

1 SMart wearable Robotic Teleoperated surgery This project has received funding from the European Union s Horizon 2020 research and innovation programme under grant agreement No

2 Context Minimally Invasive Surgery - MIS (a $50 billion market by 2019) has become an established alternative to the conventional open approaches due to its Effectiveness Patient satisfaction Teleoperated robotic surgical systems have been increasingly used in MIS procedures over the past ten years This increase is reflected in the use of service robotics for medical applications Medical Robotics correspond to 28% of the $5.2 billion market of service robotics 2
3 Motivation To assist and enhance further the surgeon s performance during MIS we need to: Develop more sensitive robotic systems with new teleoperation interfaces: Improve their efficacy Expand their applicability to more complex surgical procedures Develop advanced technologies that will reinforce R-A MIS dependability 3
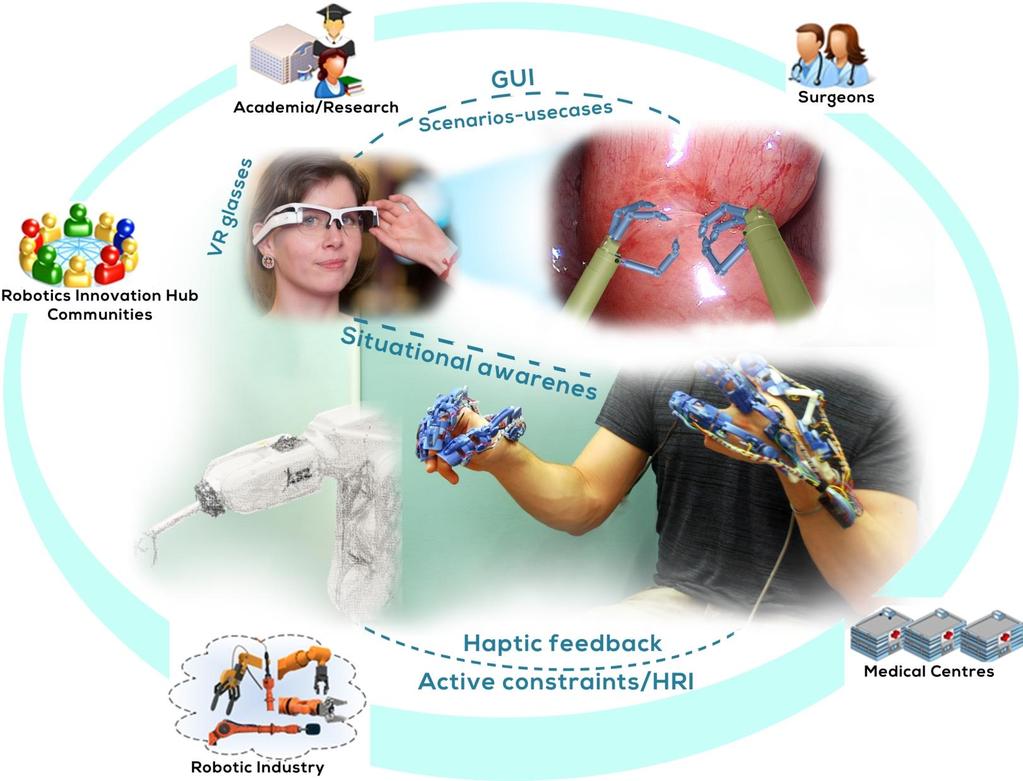
4 Breakthrough SMARTsurg project aims to develop an advanced system for performing Robot-Assisted MIS that will: Reduce surgeon s cognitive load (shorter training time) Increase accuracy and safety Reduce MIS procedure time Expand applicability A wearable surgical interface will be designed and developed: Highly dexterous anthropomorphic surgical instruments Wearable hand exoskeleton with haptic feedback for controlling the surgical instruments Wearable smart glasses for augmented reality guidance of the surgeon based on real-time 3D reconstruction of the surgical field Real-time dynamic active constraints will be applied restricting the surgical instruments motion to safe regions Short prototyping and testing cycles will be employed supported by focused end-user and commercial requirements 4
5 Objectives Develop a dexterous, adaptable, anthropomorphic surgical instrument Build a framework for providing haptic feedback from the surgical instrument to the surgeon Deploy strategies for dynamic active constraints construction and their guaranteed satisfaction Develop advanced cognition and perception abilities to achieve the real-time and on-the-fly reconstruction of the operation area Validate SMARTsurg project results in realistic scenarios involving procedures on different surgical domains 5
6 Vision 6


7 SMARTsurg System vs Existing Surgical Technologies 7
8 Impact Address healthcare issues that have a widespread applicability and at the same time reduce high cost on national healthcare systems Improve patient outcomes through a much wider offer of MIS Reduce surgeons effort by improving their ergonomics and information flow between them and the surgical field (through visualisation, haptics and novel controllers) Propose a cost-effective system that is built on top of commercial 6DOF robotic manipulators Provide a more dexterous, natural to use system with: Improved interfaces that would render fast learning and acceptance by surgeons Increased cognition abilities and dependability 8
9 Envisioned Use-Cases Use of phantoms and swine cadavers Urologic minimally invasive surgery Multiple quadrant surgery Prostate adenomectomy Partial nephrectomy Cardiovascular minimally invasive surgery Handling and suturing a cardiac valve Replacing a 0.5 to 3cm in diameter segment of artery Orthopaedic minimally invasive surgery Treatment of the meniscal tear injuries in the knee 9
10 Project Partners 10



11 More information smartsurg-project.eu Register to our Prof. Sanja Dogramadzi Bristol Robotics Laboratory University of the West of England Frenchay Campus, Coldharbour Lane Bristol BS16 1QY United Kingdom 11
12 This project has received funding from the European Union s Horizon 2020 research and innovation programme under grant agreement No
Medical robotics and Image Guided Therapy (IGT) Bogdan M. Maris, PhD Temporary Assistant Professor
 Bogdan M. Maris, PhD Temporary Assistant Professor") Medical robotics and Image Guided Therapy (IGT) Bogdan M. Maris, PhD Temporary Assistant Professor E-mail bogdan.maris@univr.it Medical Robotics History, current and future applications Robots are Accurate
Medical robotics and Image Guided Therapy (IGT) Bogdan M. Maris, PhD Temporary Assistant Professor E-mail bogdan.maris@univr.it Medical Robotics History, current and future applications Robots are Accurate
Job Description. Commitment: Must be available to work full-time hours, M-F for weeks beginning Summer of 2018.
 Research Intern Director of Research We are seeking a summer intern to support the team to develop prototype 3D sensing systems based on state-of-the-art sensing technologies along with computer vision
Research Intern Director of Research We are seeking a summer intern to support the team to develop prototype 3D sensing systems based on state-of-the-art sensing technologies along with computer vision
Medical Robotics. Part II: SURGICAL ROBOTICS
 5 Medical Robotics Part II: SURGICAL ROBOTICS In the last decade, surgery and robotics have reached a maturity that has allowed them to be safely assimilated to create a new kind of operating room. This
5 Medical Robotics Part II: SURGICAL ROBOTICS In the last decade, surgery and robotics have reached a maturity that has allowed them to be safely assimilated to create a new kind of operating room. This
Computer Assisted Medical Interventions
 Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Evaluation of Haptic Virtual Fixtures in Psychomotor Skill Development for Robotic Surgical Training
 Department of Electronics, Information and Bioengineering Neuroengineering and medical robotics Lab Evaluation of Haptic Virtual Fixtures in Psychomotor Skill Development for Robotic Surgical Training
Department of Electronics, Information and Bioengineering Neuroengineering and medical robotics Lab Evaluation of Haptic Virtual Fixtures in Psychomotor Skill Development for Robotic Surgical Training
Robotic System Simulation and Modeling Stefan Jörg Robotic and Mechatronic Center
 Robotic System Simulation and ing Stefan Jörg Robotic and Mechatronic Center Outline Introduction The SAFROS Robotic System Simulator Robotic System ing Conclusions Folie 2 DLR s Mirosurge: A versatile
Robotic System Simulation and ing Stefan Jörg Robotic and Mechatronic Center Outline Introduction The SAFROS Robotic System Simulator Robotic System ing Conclusions Folie 2 DLR s Mirosurge: A versatile
Haptic Feedback in Laparoscopic and Robotic Surgery
 Haptic Feedback in Laparoscopic and Robotic Surgery Dr. Warren Grundfest Professor Bioengineering, Electrical Engineering & Surgery UCLA, Los Angeles, California Acknowledgment This Presentation & Research
Haptic Feedback in Laparoscopic and Robotic Surgery Dr. Warren Grundfest Professor Bioengineering, Electrical Engineering & Surgery UCLA, Los Angeles, California Acknowledgment This Presentation & Research
Digital Reality TM changes everything
 F E B R U A R Y 2 0 1 8 Digital Reality TM changes everything Step into the future What are we talking about? Virtual Reality VR is an entirely digital world that completely immerses the user in an environment
F E B R U A R Y 2 0 1 8 Digital Reality TM changes everything Step into the future What are we talking about? Virtual Reality VR is an entirely digital world that completely immerses the user in an environment
Methods for Haptic Feedback in Teleoperated Robotic Surgery
 Young Group 5 1 Methods for Haptic Feedback in Teleoperated Robotic Surgery Paper Review Jessie Young Group 5: Haptic Interface for Surgical Manipulator System March 12, 2012 Paper Selection: A. M. Okamura.
Young Group 5 1 Methods for Haptic Feedback in Teleoperated Robotic Surgery Paper Review Jessie Young Group 5: Haptic Interface for Surgical Manipulator System March 12, 2012 Paper Selection: A. M. Okamura.
HUMAN Robot Cooperation Techniques in Surgery
 HUMAN Robot Cooperation Techniques in Surgery Alícia Casals Institute for Bioengineering of Catalonia (IBEC), Universitat Politècnica de Catalunya (UPC), Barcelona, Spain alicia.casals@upc.edu Keywords:
HUMAN Robot Cooperation Techniques in Surgery Alícia Casals Institute for Bioengineering of Catalonia (IBEC), Universitat Politècnica de Catalunya (UPC), Barcelona, Spain alicia.casals@upc.edu Keywords:
FALL 2014, Issue No. 32 ROBOTICS AT OUR FINGERTIPS
 FALL 2014, Issue No. 32 ROBOTICS AT OUR FINGERTIPS FALL 2014 Issue No. 32 12 CYBERSECURITY SOLUTION NSF taps UCLA Engineering to take lead in encryption research. Cover Photo: Joanne Leung 6MAN AND MACHINE
FALL 2014, Issue No. 32 ROBOTICS AT OUR FINGERTIPS FALL 2014 Issue No. 32 12 CYBERSECURITY SOLUTION NSF taps UCLA Engineering to take lead in encryption research. Cover Photo: Joanne Leung 6MAN AND MACHINE
Force Feedback Mechatronics in Medecine, Healthcare and Rehabilitation
 Force Feedback Mechatronics in Medecine, Healthcare and Rehabilitation J.P. Friconneau 1, P. Garrec 1, F. Gosselin 1, A. Riwan 1, 1 CEA-LIST DTSI/SRSI, CEN/FAR BP6, 92265 Fontenay-aux-Roses, France jean-pierre.friconneau@cea.fr
Force Feedback Mechatronics in Medecine, Healthcare and Rehabilitation J.P. Friconneau 1, P. Garrec 1, F. Gosselin 1, A. Riwan 1, 1 CEA-LIST DTSI/SRSI, CEN/FAR BP6, 92265 Fontenay-aux-Roses, France jean-pierre.friconneau@cea.fr
Wireless In Vivo Communications and Networking
 Wireless In Vivo Communications and Networking Richard D. Gitlin Minimally Invasive Surgery Wirelessly networked modules Modeling the in vivo communications channel Motivation: Wireless communications
Wireless In Vivo Communications and Networking Richard D. Gitlin Minimally Invasive Surgery Wirelessly networked modules Modeling the in vivo communications channel Motivation: Wireless communications
Balancing Safety and Cost in Robotically Assisted Surgery
 Balancing Safety and Cost in Robotically Assisted Surgery IROS 2011 LOUAI ADHAMI, PHD LADHAMI@SIMQUEST.COM Thank yous 2 ChIR & XirTek INRIA Intuitive Surgical France & USA HEGP & A. Carpentier The RNTS,
Balancing Safety and Cost in Robotically Assisted Surgery IROS 2011 LOUAI ADHAMI, PHD LADHAMI@SIMQUEST.COM Thank yous 2 ChIR & XirTek INRIA Intuitive Surgical France & USA HEGP & A. Carpentier The RNTS,
Robotic Surgical Advances for Prostatectomies
 Transcript Details This is a transcript of an educational program accessible on the ReachMD network. Details about the program and additional media formats for the program are accessible by visiting: https://reachmd.com/programs/clinicians-roundtable/robotic-surgical-advances-forprostatectomies/3179/
Transcript Details This is a transcript of an educational program accessible on the ReachMD network. Details about the program and additional media formats for the program are accessible by visiting: https://reachmd.com/programs/clinicians-roundtable/robotic-surgical-advances-forprostatectomies/3179/
Current Status and Future of Medical Virtual Reality
 2011.08.16 Medical VR Current Status and Future of Medical Virtual Reality Naoto KUME, Ph.D. Assistant Professor of Kyoto University Hospital 1. History of Medical Virtual Reality Virtual reality (VR)
2011.08.16 Medical VR Current Status and Future of Medical Virtual Reality Naoto KUME, Ph.D. Assistant Professor of Kyoto University Hospital 1. History of Medical Virtual Reality Virtual reality (VR)
1 May Telesurgery with haptic sensation: The future of surgery. Michael Stark The New European Surgical Academy (NESA)
") 1 May 2014 Telesurgery with haptic sensation: The future of surgery Michael Stark The New European Surgical Academy (NESA) Disclosure Michael Stark is the scientific advisor for the EU/SOFAR European Telesurgical
1 May 2014 Telesurgery with haptic sensation: The future of surgery Michael Stark The New European Surgical Academy (NESA) Disclosure Michael Stark is the scientific advisor for the EU/SOFAR European Telesurgical
OASIS. The new generation of BCI
 The new generation of BCI Brain Computer Interface Effectively merging in symbiotic way with digital intelligence evolves around eliminating the i/o constraint Elon Musk BCI device for the exchange (input/output)
The new generation of BCI Brain Computer Interface Effectively merging in symbiotic way with digital intelligence evolves around eliminating the i/o constraint Elon Musk BCI device for the exchange (input/output)
Distributed Robotics: Building an environment for digital cooperation. Artificial Intelligence series
 Distributed Robotics: Building an environment for digital cooperation Artificial Intelligence series Distributed Robotics March 2018 02 From programmable machines to intelligent agents Robots, from the
Distributed Robotics: Building an environment for digital cooperation Artificial Intelligence series Distributed Robotics March 2018 02 From programmable machines to intelligent agents Robots, from the
Using Simulation to Design Control Strategies for Robotic No-Scar Surgery
 Using Simulation to Design Control Strategies for Robotic No-Scar Surgery Antonio DE DONNO 1, Florent NAGEOTTE, Philippe ZANNE, Laurent GOFFIN and Michel de MATHELIN LSIIT, University of Strasbourg/CNRS,
Using Simulation to Design Control Strategies for Robotic No-Scar Surgery Antonio DE DONNO 1, Florent NAGEOTTE, Philippe ZANNE, Laurent GOFFIN and Michel de MATHELIN LSIIT, University of Strasbourg/CNRS,
Cognitive robots and emotional intelligence Cloud robotics Ethical, legal and social issues of robotic Construction robots Human activities in many
 Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Open surgery SIMULATION
 Open surgery SIMULATION ossimtech.com A note from the President and Co-Founder, Mr. André Blain Medical education and surgical training are going through exciting changes these days. Fast-paced innovation
Open surgery SIMULATION ossimtech.com A note from the President and Co-Founder, Mr. André Blain Medical education and surgical training are going through exciting changes these days. Fast-paced innovation
Novel machine interface for scaled telesurgery
 Novel machine interface for scaled telesurgery S. Clanton, D. Wang, Y. Matsuoka, D. Shelton, G. Stetten SPIE Medical Imaging, vol. 5367, pp. 697-704. San Diego, Feb. 2004. A Novel Machine Interface for
Novel machine interface for scaled telesurgery S. Clanton, D. Wang, Y. Matsuoka, D. Shelton, G. Stetten SPIE Medical Imaging, vol. 5367, pp. 697-704. San Diego, Feb. 2004. A Novel Machine Interface for
How technology can enable the fourth industrial revolution. Lynne McGregor 28 February 2018
 How technology can enable the fourth industrial revolution Lynne McGregor 28 February 2018 What is 4IR and how can it help the UK economy? Industry 4.0 is the digital transformation of manufacturing: leveraging
How technology can enable the fourth industrial revolution Lynne McGregor 28 February 2018 What is 4IR and how can it help the UK economy? Industry 4.0 is the digital transformation of manufacturing: leveraging
Can technological solutions support user experience, learning, and operation outcome in robotic surgery?
 VTT TECHNICAL RESEARCH CENTRE OF FINLAND LTD Can technological solutions support user experience, learning, and operation outcome in robotic surgery? ERF2016 Session Image Guided Robotic Surgery and Interventions
VTT TECHNICAL RESEARCH CENTRE OF FINLAND LTD Can technological solutions support user experience, learning, and operation outcome in robotic surgery? ERF2016 Session Image Guided Robotic Surgery and Interventions
Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Politecnico di Milano - Dipartimento di Elettronica, Informazione e Bioingegneria Industrial robotics
Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Politecnico di Milano - Dipartimento di Elettronica, Informazione e Bioingegneria Industrial robotics
Application of Force Feedback in Robot Assisted Minimally Invasive Surgery
 Application of Force Feedback in Robot Assisted Minimally Invasive Surgery István Nagy, Hermann Mayer, and Alois Knoll Technische Universität München, 85748 Garching, Germany, {nagy mayerh knoll}@in.tum.de,
Application of Force Feedback in Robot Assisted Minimally Invasive Surgery István Nagy, Hermann Mayer, and Alois Knoll Technische Universität München, 85748 Garching, Germany, {nagy mayerh knoll}@in.tum.de,
Haptics in Military Applications. Lauri Immonen
 Haptics in Military Applications Lauri Immonen What is this all about? Let's have a look at haptics in military applications Three categories of interest: o Medical applications o Communication o Combat
Haptics in Military Applications Lauri Immonen What is this all about? Let's have a look at haptics in military applications Three categories of interest: o Medical applications o Communication o Combat
Transforming Surgical Robotics. 34 th Annual J.P. Morgan Healthcare Conference January 14, 2016
 1 Transforming Surgical Robotics 34 th Annual J.P. Morgan Healthcare Conference January 14, 2016 Forward Looking Statements 2 This presentation includes statements relating to TransEnterix s current regulatory
1 Transforming Surgical Robotics 34 th Annual J.P. Morgan Healthcare Conference January 14, 2016 Forward Looking Statements 2 This presentation includes statements relating to TransEnterix s current regulatory
INTRODUCING THE VIRTUAL REALITY FLIGHT SIMULATOR FOR SURGEONS
 INTRODUCING THE VIRTUAL REALITY FLIGHT SIMULATOR FOR SURGEONS SAFE REPEATABLE MEASUREABLE SCALABLE PROVEN SCALABLE, LOW COST, VIRTUAL REALITY SURGICAL SIMULATION The benefits of surgical simulation are
INTRODUCING THE VIRTUAL REALITY FLIGHT SIMULATOR FOR SURGEONS SAFE REPEATABLE MEASUREABLE SCALABLE PROVEN SCALABLE, LOW COST, VIRTUAL REALITY SURGICAL SIMULATION The benefits of surgical simulation are
Chapter 1. Introduction
 Chapter 1 Introduction Robotics technology has recently found extensive use in surgical and therapeutic procedures. The purpose of this chapter is to give an overview of the robotic tools which may be
Chapter 1 Introduction Robotics technology has recently found extensive use in surgical and therapeutic procedures. The purpose of this chapter is to give an overview of the robotic tools which may be
Virtual and Augmented Reality techniques embedded and based on a Operative Microscope. Training for Neurosurgery.
 Virtual and Augmented Reality techniques embedded and based on a Operative Microscope. Training for Neurosurgery. 1 M. Aschke 1, M.Ciucci 1,J.Raczkowsky 1, R.Wirtz 2, H. Wörn 1 1 IPR, Institute for Process
Virtual and Augmented Reality techniques embedded and based on a Operative Microscope. Training for Neurosurgery. 1 M. Aschke 1, M.Ciucci 1,J.Raczkowsky 1, R.Wirtz 2, H. Wörn 1 1 IPR, Institute for Process
School of Computer Science. Course Title: Introduction to Human-Computer Interaction Date: 8/16/11
 Course Title: Introduction to Human-Computer Interaction Date: 8/16/11 Course Number: CEN-371 Number of Credits: 3 Subject Area: Computer Systems Subject Area Coordinator: Christine Lisetti email: lisetti@cis.fiu.edu
Course Title: Introduction to Human-Computer Interaction Date: 8/16/11 Course Number: CEN-371 Number of Credits: 3 Subject Area: Computer Systems Subject Area Coordinator: Christine Lisetti email: lisetti@cis.fiu.edu
da Vinci Skills Simulator
 da Vinci Skills Simulator Introducing Simulation for the da Vinci Surgical System Skills Practice in an Immersive Virtual Environment Portable. Practical. Powerful. The da Vinci Skills Simulator contains
da Vinci Skills Simulator Introducing Simulation for the da Vinci Surgical System Skills Practice in an Immersive Virtual Environment Portable. Practical. Powerful. The da Vinci Skills Simulator contains
Haptic Feedback in Robot Assisted Minimal Invasive Surgery
 K. Bhatia Haptic Feedback in Robot Assisted Minimal Invasive Surgery 1 / 33 MIN Faculty Department of Informatics Haptic Feedback in Robot Assisted Minimal Invasive Surgery Kavish Bhatia University of
K. Bhatia Haptic Feedback in Robot Assisted Minimal Invasive Surgery 1 / 33 MIN Faculty Department of Informatics Haptic Feedback in Robot Assisted Minimal Invasive Surgery Kavish Bhatia University of
Small Occupancy Robotic Mechanisms for Endoscopic Surgery
 Small Occupancy Robotic Mechanisms for Endoscopic Surgery Yuki Kobayashi, Shingo Chiyoda, Kouichi Watabe, Masafumi Okada, and Yoshihiko Nakamura Department of Mechano-Informatics, The University of Tokyo,
Small Occupancy Robotic Mechanisms for Endoscopic Surgery Yuki Kobayashi, Shingo Chiyoda, Kouichi Watabe, Masafumi Okada, and Yoshihiko Nakamura Department of Mechano-Informatics, The University of Tokyo,
Epona Medical simulation products catalog Version 1.0
 Epona Medical simulation products catalog Version 1.0 Simulator for laparoscopic surgery Simulator for Arthroscopic surgery Simulator for infant patient critical care Simulator for vascular procedures
Epona Medical simulation products catalog Version 1.0 Simulator for laparoscopic surgery Simulator for Arthroscopic surgery Simulator for infant patient critical care Simulator for vascular procedures
Ubiquitous Computing Summer Episode 16: HCI. Hannes Frey and Peter Sturm University of Trier. Hannes Frey and Peter Sturm, University of Trier 1
 Episode 16: HCI Hannes Frey and Peter Sturm University of Trier University of Trier 1 Shrinking User Interface Small devices Narrow user interface Only few pixels graphical output No keyboard Mobility
Episode 16: HCI Hannes Frey and Peter Sturm University of Trier University of Trier 1 Shrinking User Interface Small devices Narrow user interface Only few pixels graphical output No keyboard Mobility
Cognitive Systems and Robotics: opportunities in FP7
 Cognitive Systems and Robotics: opportunities in FP7 Austrian Robotics Summit July 3, 2009 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media European
Cognitive Systems and Robotics: opportunities in FP7 Austrian Robotics Summit July 3, 2009 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media European
UNIT 2 TOPICS IN COMPUTER SCIENCE. Emerging Technologies and Society
 UNIT 2 TOPICS IN COMPUTER SCIENCE Emerging Technologies and Society EMERGING TECHNOLOGIES Technology has become perhaps the greatest agent of change in the modern world. While never without risk, positive
UNIT 2 TOPICS IN COMPUTER SCIENCE Emerging Technologies and Society EMERGING TECHNOLOGIES Technology has become perhaps the greatest agent of change in the modern world. While never without risk, positive
Towards robotic heart surgery: Introduction of autonomous procedures into an experimental surgical telemanipulator system
 74 ORIGINAL ARTICLE Towards robotic heart surgery: Introduction of autonomous procedures into an experimental surgical telemanipulator system R Bauernschmitt*, E U Schirmbeck*, A Knoll, H Mayer, I Nagy,
74 ORIGINAL ARTICLE Towards robotic heart surgery: Introduction of autonomous procedures into an experimental surgical telemanipulator system R Bauernschmitt*, E U Schirmbeck*, A Knoll, H Mayer, I Nagy,
3D User Interaction CS-525U: Robert W. Lindeman. Intro to 3D UI. Department of Computer Science. Worcester Polytechnic Institute.
 CS-525U: 3D User Interaction Intro to 3D UI Robert W. Lindeman Worcester Polytechnic Institute Department of Computer Science gogo@wpi.edu Why Study 3D UI? Relevant to real-world tasks Can use familiarity
CS-525U: 3D User Interaction Intro to 3D UI Robert W. Lindeman Worcester Polytechnic Institute Department of Computer Science gogo@wpi.edu Why Study 3D UI? Relevant to real-world tasks Can use familiarity
Telemanipulation and Telestration for Microsurgery Summary
 Telemanipulation and Telestration for Microsurgery Summary Microsurgery presents an array of problems. For instance, current methodologies of Eye Surgery requires freehand manipulation of delicate structures
Telemanipulation and Telestration for Microsurgery Summary Microsurgery presents an array of problems. For instance, current methodologies of Eye Surgery requires freehand manipulation of delicate structures
Imagine your future lab. Designed using Virtual Reality and Computer Simulation
 Imagine your future lab Designed using Virtual Reality and Computer Simulation Bio At Roche Healthcare Consulting our talented professionals are committed to optimising patient care. Our diverse range
Imagine your future lab Designed using Virtual Reality and Computer Simulation Bio At Roche Healthcare Consulting our talented professionals are committed to optimising patient care. Our diverse range
Surgical robot simulation with BBZ console
 Review Article on Thoracic Surgery Surgical robot simulation with BBZ console Francesco Bovo 1, Giacomo De Rossi 2, Francesco Visentin 2,3 1 BBZ srl, Verona, Italy; 2 Department of Computer Science, Università
Review Article on Thoracic Surgery Surgical robot simulation with BBZ console Francesco Bovo 1, Giacomo De Rossi 2, Francesco Visentin 2,3 1 BBZ srl, Verona, Italy; 2 Department of Computer Science, Università
Force feedback interfaces & applications
 Force feedback interfaces & applications Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jukka Raisamo,
Force feedback interfaces & applications Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jukka Raisamo,
Robotics, telepresence and minimal access surgery - A short and selective history
 Robotics, telepresence and minimal access surgery - A short and selective history Luke Hares, Technology Director, Cambridge Medical Robotics P-306v2.0 Overview o Disclaimer! o Highlights of robotics and
Robotics, telepresence and minimal access surgery - A short and selective history Luke Hares, Technology Director, Cambridge Medical Robotics P-306v2.0 Overview o Disclaimer! o Highlights of robotics and
GamECAR JULY ULY Meetings. 5 Toward the future. 5 Consortium. E Stay updated
 NEWSLETTER 1 ULY 2017 JULY The project engine has started and there is a long way to go, but we aim at consuming as less gas as possible! It will be a game, but a serious one. Playing it for real, while
NEWSLETTER 1 ULY 2017 JULY The project engine has started and there is a long way to go, but we aim at consuming as less gas as possible! It will be a game, but a serious one. Playing it for real, while
2. Introduction to Computer Haptics
 2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue
Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue
VR for Microsurgery. Design Document. Team: May1702 Client: Dr. Ben-Shlomo Advisor: Dr. Keren Website:
 VR for Microsurgery Design Document Team: May1702 Client: Dr. Ben-Shlomo Advisor: Dr. Keren Email: med-vr@iastate.edu Website: Team Members/Role: Maggie Hollander Leader Eric Edwards Communication Leader
VR for Microsurgery Design Document Team: May1702 Client: Dr. Ben-Shlomo Advisor: Dr. Keren Email: med-vr@iastate.edu Website: Team Members/Role: Maggie Hollander Leader Eric Edwards Communication Leader
Robots in the Field of Medicine
 Robots in the Field of Medicine Austin Gillis and Peter Demirdjian Malden Catholic High School 1 Pioneers Robots in the Field of Medicine The use of robots in medicine is where it is today because of four
Robots in the Field of Medicine Austin Gillis and Peter Demirdjian Malden Catholic High School 1 Pioneers Robots in the Field of Medicine The use of robots in medicine is where it is today because of four
Virtual Reality Based Training to resolve Visio-motor Conflicts in Surgical Environments
 HAVE 2008 IEEE International Workshop on Haptic Audio Visual Environments and their Applications Ottawa Canada, 18-19 October 2008 Virtual Reality Based Training to resolve Visio-motor Conflicts in Surgical
HAVE 2008 IEEE International Workshop on Haptic Audio Visual Environments and their Applications Ottawa Canada, 18-19 October 2008 Virtual Reality Based Training to resolve Visio-motor Conflicts in Surgical
AC : MEDICAL ROBOTICS LABORATORY FOR BIOMEDICAL ENGINEERS
 AC 2008-1272: MEDICAL ROBOTICS LABORATORY FOR BIOMEDICAL ENGINEERS Shahin Sirouspour, McMaster University http://www.ece.mcmaster.ca/~sirouspour/ Mahyar Fotoohi, Quanser Inc Pawel Malysz, McMaster University
AC 2008-1272: MEDICAL ROBOTICS LABORATORY FOR BIOMEDICAL ENGINEERS Shahin Sirouspour, McMaster University http://www.ece.mcmaster.ca/~sirouspour/ Mahyar Fotoohi, Quanser Inc Pawel Malysz, McMaster University
Stereoscopic Augmented Reality System for Computer Assisted Surgery
 Marc Liévin and Erwin Keeve Research center c a e s a r, Center of Advanced European Studies and Research, Surgical Simulation and Navigation Group, Friedensplatz 16, 53111 Bonn, Germany. A first architecture
Marc Liévin and Erwin Keeve Research center c a e s a r, Center of Advanced European Studies and Research, Surgical Simulation and Navigation Group, Friedensplatz 16, 53111 Bonn, Germany. A first architecture
MIVS Tel:
 www.medical-imaging.org.uk medvis-info@bangor.ac.uk Tel: 01248 388244 MIVS 2014 Medical Imaging and Visualization Solutions Drop in centre from 10.00am-4.00pm Friday 17th Jan 2014 - Bangor, Gwynedd Post
www.medical-imaging.org.uk medvis-info@bangor.ac.uk Tel: 01248 388244 MIVS 2014 Medical Imaging and Visualization Solutions Drop in centre from 10.00am-4.00pm Friday 17th Jan 2014 - Bangor, Gwynedd Post
Differences in Fitts Law Task Performance Based on Environment Scaling
 Differences in Fitts Law Task Performance Based on Environment Scaling Gregory S. Lee and Bhavani Thuraisingham Department of Computer Science University of Texas at Dallas 800 West Campbell Road Richardson,
Differences in Fitts Law Task Performance Based on Environment Scaling Gregory S. Lee and Bhavani Thuraisingham Department of Computer Science University of Texas at Dallas 800 West Campbell Road Richardson,
CSE 165: 3D User Interaction. Lecture #14: 3D UI Design
 CSE 165: 3D User Interaction Lecture #14: 3D UI Design 2 Announcements Homework 3 due tomorrow 2pm Monday: midterm discussion Next Thursday: midterm exam 3D UI Design Strategies 3 4 Thus far 3DUI hardware
CSE 165: 3D User Interaction Lecture #14: 3D UI Design 2 Announcements Homework 3 due tomorrow 2pm Monday: midterm discussion Next Thursday: midterm exam 3D UI Design Strategies 3 4 Thus far 3DUI hardware
Ravikiran Joseph Singapogu, Ph.D.
 Ravikiran Joseph Singapogu, Ph.D. Contact Information Research Interests 520 Rhodes Engineering Research Center 864-650-4144 Clemson, SC 29634 joseph@clemson.edu Virtual and Augmented Reality Medical Simulators
Ravikiran Joseph Singapogu, Ph.D. Contact Information Research Interests 520 Rhodes Engineering Research Center 864-650-4144 Clemson, SC 29634 joseph@clemson.edu Virtual and Augmented Reality Medical Simulators
Autonomous Surgical Robotics
 Nicolás Pérez de Olaguer Santamaría Autonomous Surgical Robotics 1 / 29 MIN Faculty Department of Informatics Autonomous Surgical Robotics Nicolás Pérez de Olaguer Santamaría University of Hamburg Faculty
Nicolás Pérez de Olaguer Santamaría Autonomous Surgical Robotics 1 / 29 MIN Faculty Department of Informatics Autonomous Surgical Robotics Nicolás Pérez de Olaguer Santamaría University of Hamburg Faculty
Haptics Technologies: Bringing Touch to Multimedia
 Haptics Technologies: Bringing Touch to Multimedia C2: Haptics Applications Outline Haptic Evolution: from Psychophysics to Multimedia Haptics for Medical Applications Surgical Simulations Stroke-based
Haptics Technologies: Bringing Touch to Multimedia C2: Haptics Applications Outline Haptic Evolution: from Psychophysics to Multimedia Haptics for Medical Applications Surgical Simulations Stroke-based
Development and Integration of Artificial Intelligence Technologies for Innovation Acceleration
 Development and Integration of Artificial Intelligence Technologies for Innovation Acceleration Research Supervisor: Minoru Etoh (Professor, Open and Transdisciplinary Research Initiatives, Osaka University)
Development and Integration of Artificial Intelligence Technologies for Innovation Acceleration Research Supervisor: Minoru Etoh (Professor, Open and Transdisciplinary Research Initiatives, Osaka University)
Haptic Reproduction and Interactive Visualization of a Beating Heart Based on Cardiac Morphology
 MEDINFO 2001 V. Patel et al. (Eds) Amsterdam: IOS Press 2001 IMIA. All rights reserved Haptic Reproduction and Interactive Visualization of a Beating Heart Based on Cardiac Morphology Megumi Nakao a, Masaru
MEDINFO 2001 V. Patel et al. (Eds) Amsterdam: IOS Press 2001 IMIA. All rights reserved Haptic Reproduction and Interactive Visualization of a Beating Heart Based on Cardiac Morphology Megumi Nakao a, Masaru
Università di Roma La Sapienza. Medical Robotics. A Teleoperation System for Research in MIRS. Marilena Vendittelli
 Università di Roma La Sapienza Medical Robotics A Teleoperation System for Research in MIRS Marilena Vendittelli the DLR teleoperation system slave three versatile robots MIRO light-weight: weight < 10
Università di Roma La Sapienza Medical Robotics A Teleoperation System for Research in MIRS Marilena Vendittelli the DLR teleoperation system slave three versatile robots MIRO light-weight: weight < 10
CAPACITIES FOR TECHNOLOGY TRANSFER
 CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
Tactile Interactions During Robot Assisted Surgical Interventions. Lakmal Seneviratne
 Tactile Interactions During Robot Assisted Surgical Interventions Lakmal Seneviratne Professor of Mechatronics Kings College London Professor of Mechanical Eng. Khalifa Univeristy, Abu Dhabi. 1 Overview
Tactile Interactions During Robot Assisted Surgical Interventions Lakmal Seneviratne Professor of Mechatronics Kings College London Professor of Mechanical Eng. Khalifa Univeristy, Abu Dhabi. 1 Overview
towerswatson.com Transforming Life Medtronic aligns global total rewards with EVP
 towerswatson.com Transforming Life Medtronic aligns global total rewards with EVP Transforming Life Medtronic aligns global total rewards with EVP By Lucie P. Lawrence In 1949, in a 600-square-foot garage
towerswatson.com Transforming Life Medtronic aligns global total rewards with EVP Transforming Life Medtronic aligns global total rewards with EVP By Lucie P. Lawrence In 1949, in a 600-square-foot garage
Booklet of teaching units
 International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
Research article Methods for haptic feedback in teleoperated robot-assisted surgery
 Research article Methods for haptic feedback in teleoperated robot-assisted surgery The author is based in the Department of Mechanical Engineering, The Johns Hopkins University, Baltimore, Maryland, USA.
Research article Methods for haptic feedback in teleoperated robot-assisted surgery The author is based in the Department of Mechanical Engineering, The Johns Hopkins University, Baltimore, Maryland, USA.
An Inexpensive Experimental Setup for Teaching The Concepts of Da Vinci Surgical Robot
 An Inexpensive Experimental Setup for Teaching The Concepts of Da Vinci Surgical Robot S.Vignesh kishan kumar 1, G. Anitha 2 1 M.TECH Biomedical Engineering, SRM University, Chennai 2 Assistant Professor,
An Inexpensive Experimental Setup for Teaching The Concepts of Da Vinci Surgical Robot S.Vignesh kishan kumar 1, G. Anitha 2 1 M.TECH Biomedical Engineering, SRM University, Chennai 2 Assistant Professor,
Global Robotic Surgery Market: Industry Analysis & Outlook ( )
") Industry Research by Koncept Analytics Global Robotic Surgery Market: Industry Analysis & Outlook ----------------------------------------- (2017-2021) June 2017 1 Executive Summary Medical robotics is
Industry Research by Koncept Analytics Global Robotic Surgery Market: Industry Analysis & Outlook ----------------------------------------- (2017-2021) June 2017 1 Executive Summary Medical robotics is
Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery
 Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery Claudio Pacchierotti Domenico Prattichizzo Katherine J. Kuchenbecker Motivation Despite its expected clinical
Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery Claudio Pacchierotti Domenico Prattichizzo Katherine J. Kuchenbecker Motivation Despite its expected clinical
VIRTUAL REALITY Introduction. Emil M. Petriu SITE, University of Ottawa
 VIRTUAL REALITY Introduction Emil M. Petriu SITE, University of Ottawa Natural and Virtual Reality Virtual Reality Interactive Virtual Reality Virtualized Reality Augmented Reality HUMAN PERCEPTION OF
VIRTUAL REALITY Introduction Emil M. Petriu SITE, University of Ottawa Natural and Virtual Reality Virtual Reality Interactive Virtual Reality Virtualized Reality Augmented Reality HUMAN PERCEPTION OF
Through the range of motion with NAVIO Instructional course
 Enabling robotic-assisted technologies arthoplasty Through the range of motion with NAVIO Instructional course Preliminary programme Invited chairman: Prof Sébastien Lustig (France) Expert Connect Centre,
Enabling robotic-assisted technologies arthoplasty Through the range of motion with NAVIO Instructional course Preliminary programme Invited chairman: Prof Sébastien Lustig (France) Expert Connect Centre,
EMPOWERING THE CONNECTED FIELD FORCE WORKER WITH ADVANCED ANALYTICS MATTHEW SHORT ACCENTURE LABS
 EMPOWERING THE CONNECTED FIELD FORCE WORKER WITH ADVANCED ANALYTICS MATTHEW SHORT ACCENTURE LABS ACCENTURE LABS DUBLIN Artificial Intelligence Security SILICON VALLEY Digital Experiences Artificial Intelligence
EMPOWERING THE CONNECTED FIELD FORCE WORKER WITH ADVANCED ANALYTICS MATTHEW SHORT ACCENTURE LABS ACCENTURE LABS DUBLIN Artificial Intelligence Security SILICON VALLEY Digital Experiences Artificial Intelligence
Design of an Intermediate Layer to Enhance Operator Awareness and Safety in Telesurgical Systems
 212 IEEE/RSJ International Conference on Intelligent Robots and Systems October 7-12, 212. Vilamoura, Algarve, Portugal Design of an Intermediate Layer to Enhance Operator Awareness and Safety in Telesurgical
212 IEEE/RSJ International Conference on Intelligent Robots and Systems October 7-12, 212. Vilamoura, Algarve, Portugal Design of an Intermediate Layer to Enhance Operator Awareness and Safety in Telesurgical
Prospective Teleautonomy For EOD Operations
 Perception and task guidance Perceived world model & intent Prospective Teleautonomy For EOD Operations Prof. Seth Teller Electrical Engineering and Computer Science Department Computer Science and Artificial
Perception and task guidance Perceived world model & intent Prospective Teleautonomy For EOD Operations Prof. Seth Teller Electrical Engineering and Computer Science Department Computer Science and Artificial
Virtual and Augmented Reality Applications
 Department of Engineering for Innovation University of Salento Lecce, Italy Augmented and Virtual Reality Laboratory (AVR Lab) Keynote Speech: Augmented and Virtual Reality Laboratory (AVR Lab) Keynote
Department of Engineering for Innovation University of Salento Lecce, Italy Augmented and Virtual Reality Laboratory (AVR Lab) Keynote Speech: Augmented and Virtual Reality Laboratory (AVR Lab) Keynote
Medical Robotics LBR Med
 Medical Robotics LBR Med EN KUKA, a proven robotics partner. Discerning users around the world value KUKA as a reliable partner. KUKA has branches in over 30 countries, and for over 40 years, we have been
Medical Robotics LBR Med EN KUKA, a proven robotics partner. Discerning users around the world value KUKA as a reliable partner. KUKA has branches in over 30 countries, and for over 40 years, we have been
& Medical Tourism. DIHTF - Dubai 20 th -21 st Feb 2018 V S Venkatesh -India
 & Medical Tourism DIHTF - Dubai 20 th -21 st Feb 2018 V S Venkatesh -India The human brain is an amazing work of art, it has very complex neural circuits and the way it registers, stores, processes and
& Medical Tourism DIHTF - Dubai 20 th -21 st Feb 2018 V S Venkatesh -India The human brain is an amazing work of art, it has very complex neural circuits and the way it registers, stores, processes and
Potential areas of industrial interest relevant for cross-cutting KETs in the Electronics and Communication Systems domain
 This fiche is part of the wider roadmap for cross-cutting KETs activities Potential areas of industrial interest relevant for cross-cutting KETs in the Electronics and Communication Systems domain Cross-cutting
This fiche is part of the wider roadmap for cross-cutting KETs activities Potential areas of industrial interest relevant for cross-cutting KETs in the Electronics and Communication Systems domain Cross-cutting
AI & Robotics for Healthcare. Olivier Da Costa, PhD Program Officer Robotics & AI European Commission
 AI & Robotics for Healthcare Olivier Da Costa, PhD Program Officer Robotics & AI European Commission Olivier.da-costa@ec.europa.eu Project / Program Officer 11 years in the "Robotics & AI" Unit / DG CNECT
AI & Robotics for Healthcare Olivier Da Costa, PhD Program Officer Robotics & AI European Commission Olivier.da-costa@ec.europa.eu Project / Program Officer 11 years in the "Robotics & AI" Unit / DG CNECT
Using Web-Based Computer Graphics to Teach Surgery
 Using Web-Based Computer Graphics to Teach Surgery Ken Brodlie Nuha El-Khalili Ying Li School of Computer Studies University of Leeds Position Paper for GVE99, Coimbra, Portugal Surgical Training Surgical
Using Web-Based Computer Graphics to Teach Surgery Ken Brodlie Nuha El-Khalili Ying Li School of Computer Studies University of Leeds Position Paper for GVE99, Coimbra, Portugal Surgical Training Surgical
Wearable Haptic Feedback Actuators for Training in Robotic Surgery
 Wearable Haptic Feedback Actuators for Training in Robotic Surgery NSF Summer Undergraduate Fellowship in Sensor Technologies Joshua Fernandez (Mechanical Eng.) University of Maryland Baltimore County
Wearable Haptic Feedback Actuators for Training in Robotic Surgery NSF Summer Undergraduate Fellowship in Sensor Technologies Joshua Fernandez (Mechanical Eng.) University of Maryland Baltimore County
Sustainable & Intelligent Robotics Group Projects
 Machine learning for robotic grasping Hyb-Re glove for hand rehabilitation Hyb-Knee for gait augmentation Colonoscopy view range expansion device Sustainable & Intelligent Robotics Group Projects Supervisor:
Machine learning for robotic grasping Hyb-Re glove for hand rehabilitation Hyb-Knee for gait augmentation Colonoscopy view range expansion device Sustainable & Intelligent Robotics Group Projects Supervisor:
Harvard BioRobotics Laboratory Technical Report
 Harvard BioRobotics Laboratory Technical Report December 2 Virtual Fixtures for Robotic Endoscopic Surgery Fuji Lai & Robert D. Howe Division of Engineering and Applied Sciences Harvard University 323
Harvard BioRobotics Laboratory Technical Report December 2 Virtual Fixtures for Robotic Endoscopic Surgery Fuji Lai & Robert D. Howe Division of Engineering and Applied Sciences Harvard University 323
The Internet of Buildings: A Technological Boon for Healthcare Building Systems, Operations and Medical Equipment
 The Internet of Buildings: A Technological Boon for Healthcare Building Systems, Operations and Medical Equipment Learning Objectives 1. Understand the rise of the Internet of Things and how it will forever
The Internet of Buildings: A Technological Boon for Healthcare Building Systems, Operations and Medical Equipment Learning Objectives 1. Understand the rise of the Internet of Things and how it will forever
revolutionizing Subhead Can Be Placed Here healthcare Anders Gronstedt, Ph.D., President, Gronstedt Group September 22, 2017
 How Presentation virtual reality Title is revolutionizing Subhead Can Be Placed Here healthcare Anders Gronstedt, Ph.D., President, Gronstedt Group September 22, 2017 Please introduce yourself in text
How Presentation virtual reality Title is revolutionizing Subhead Can Be Placed Here healthcare Anders Gronstedt, Ph.D., President, Gronstedt Group September 22, 2017 Please introduce yourself in text
Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular
Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular
Image Guided Robotic Assisted Surgical Training System using LabVIEW and CompactRIO
 Image Guided Robotic Assisted Surgical Training System using LabVIEW and CompactRIO Weimin Huang 1, Tao Yang 1, Liang Jing Yang 2, Chee Kong Chui 2, Jimmy Liu 1, Jiayin Zhou 1, Jing Zhang 1, Yi Su 3, Stephen
Image Guided Robotic Assisted Surgical Training System using LabVIEW and CompactRIO Weimin Huang 1, Tao Yang 1, Liang Jing Yang 2, Chee Kong Chui 2, Jimmy Liu 1, Jiayin Zhou 1, Jing Zhang 1, Yi Su 3, Stephen
Haptic Virtual Fixtures for Robot-Assisted Manipulation
 Haptic Virtual Fixtures for Robot-Assisted Manipulation Jake J. Abbott, Panadda Marayong, and Allison M. Okamura Department of Mechanical Engineering, The Johns Hopkins University {jake.abbott, pmarayong,
Haptic Virtual Fixtures for Robot-Assisted Manipulation Jake J. Abbott, Panadda Marayong, and Allison M. Okamura Department of Mechanical Engineering, The Johns Hopkins University {jake.abbott, pmarayong,
Performance evaluation and benchmarking in EU-funded activities. ICRA May 2011
 Performance evaluation and benchmarking in EU-funded activities ICRA 2011 13 May 2011 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media European
Performance evaluation and benchmarking in EU-funded activities ICRA 2011 13 May 2011 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media European
Wireless Master-Slave Embedded Controller for a Teleoperated Anthropomorphic Robotic Arm with Gripping Force Sensing
 Wireless Master-Slave Embedded Controller for a Teleoperated Anthropomorphic Robotic Arm with Gripping Force Sensing Presented by: Benjamin B. Rhoades ECGR 6185 Adv. Embedded Systems January 16 th 2013
Wireless Master-Slave Embedded Controller for a Teleoperated Anthropomorphic Robotic Arm with Gripping Force Sensing Presented by: Benjamin B. Rhoades ECGR 6185 Adv. Embedded Systems January 16 th 2013
Introduction to UCL Interaction Centre (UCLIC) Paul Marshall, Lecturer in Interaction Design
 Paul Marshall, Lecturer in Interaction Design") Introduction to UCL Interaction Centre (UCLIC) Paul Marshall, Lecturer in Interaction Design UCLIC: Overview Focus on human interactions with technology Research Knowledge transfer Teaching Usability labs
Introduction to UCL Interaction Centre (UCLIC) Paul Marshall, Lecturer in Interaction Design UCLIC: Overview Focus on human interactions with technology Research Knowledge transfer Teaching Usability labs
A Training Simulator for the Angioplasty Intervention with a Web Portal for the Virtual Environment Searching
 A Training Simulator for the Angioplasty Intervention with a Web Portal for the Virtual Environment Searching GIOVANNI ALOISIO, LUCIO T. DE PAOLIS, LUCIANA PROVENZANO Department of Innovation Engineering
A Training Simulator for the Angioplasty Intervention with a Web Portal for the Virtual Environment Searching GIOVANNI ALOISIO, LUCIO T. DE PAOLIS, LUCIANA PROVENZANO Department of Innovation Engineering
2. Publishable summary
 2. Publishable summary CogLaboration (Successful real World Human-Robot Collaboration: from the cognition of human-human collaboration to fluent human-robot collaboration) is a specific targeted research
2. Publishable summary CogLaboration (Successful real World Human-Robot Collaboration: from the cognition of human-human collaboration to fluent human-robot collaboration) is a specific targeted research
Comparison of Simulated Ovary Training Over Different Skill Levels
 Comparison of Simulated Ovary Training Over Different Skill Levels Andrew Crossan, Stephen Brewster Glasgow Interactive Systems Group Department of Computing Science University of Glasgow, Glasgow, G12
Comparison of Simulated Ovary Training Over Different Skill Levels Andrew Crossan, Stephen Brewster Glasgow Interactive Systems Group Department of Computing Science University of Glasgow, Glasgow, G12
ECHORD and ECHORD++ European Clearing House for Open Robotics Development
 ECHORD and ECHORD++ European Clearing House for Open Robotics Development Paolo Dario* and Alois Knoll *The BioRobotics Institute, Scuola Superiore Sant Anna (Italy) Technische Universität München (Germany)
ECHORD and ECHORD++ European Clearing House for Open Robotics Development Paolo Dario* and Alois Knoll *The BioRobotics Institute, Scuola Superiore Sant Anna (Italy) Technische Universität München (Germany)
4/23/16. Virtual Reality. Virtual reality. Virtual reality is a hot topic today. Virtual reality
 CSCI 420 Computer Graphics Lecture 25 Virtual Reality Virtual reality computer-simulated environments that can simulate physical presence in places in the real world, as well as in imaginary worlds History
CSCI 420 Computer Graphics Lecture 25 Virtual Reality Virtual reality computer-simulated environments that can simulate physical presence in places in the real world, as well as in imaginary worlds History