Medical robotics and Image Guided Therapy (IGT) Bogdan M. Maris, PhD Temporary Assistant Professor
|
|
|
- Abel Lewis
- 5 years ago
- Views:
Transcription
1 Medical robotics and Image Guided Therapy (IGT) Bogdan M. Maris, PhD Temporary Assistant Professor


2 Medical Robotics History, current and future applications
 Remotely operated (as needed) Connected to computers, which")

3 Robots are Accurate and precise; untiring Smaller or larger than people (as needed) Remotely operated (as needed) Connected to computers, which gives them access to information Not always able to operate autonomously in highly complex, unvertain environments => need for human interaction
4 Overview Introduction Application of Medical Robotics Design of Robotic Telesurgery Historic Companies and Systems Existing surgical systems Strengths and Limitations Ethical and Safety Considerations On-going research projects in Verona Challenges, Future and Conclusion

5 Introduction(1) Definition: Robotic systems for surgery There are computer-assisted surgery (CAS) systems first, and medical robots second. The robot itself is just one element of a larger system designed to assist a surgeon in carrying out a surgical procedure.. [Taylor, 2003] Computer-assisted surgery is an interdisciplinary research field that builds a bridge between surgery and computer science. It represents a set of methods which use computer technology to support preoperative planning, the actual surgery, and postoperative assessment.


6 Introduction(2) CAS Intervention 1 CT scan 2 3 Patient Specific models Mental Model Information flow in CAS Diagnosis




7 Introduction(3) Ideal CAS Robotic execution 1 CT scan Image registration 2 Intervention planning 3 3D virtual models and phantoms Training 3D interactive virtual reality Information flow in CAS

8 Introduction(4) MIS Minimally invasive surgery uses techniques of surgical access and exposure that significantly reduce trauma to the body compared to traditional incisions.

9 Introduction(5) Motivation: Started with the weaknesses and strengths of minimally invasive surgery (MIS) Smaller incisions, shorter post-operative time, reduced infection, faster rehabilitation, lesser pain, better cosmetics,... Eye-hand coordination, difficulty in moving arms, degree of motion

10 Application of Medical Robotics(1) Telemedicine and Teleconsultation Telecommunciation channels to communicate with other physicians/patients Control an external camera which in turn controls an endoscopic camera used to share images with a remote surgeon

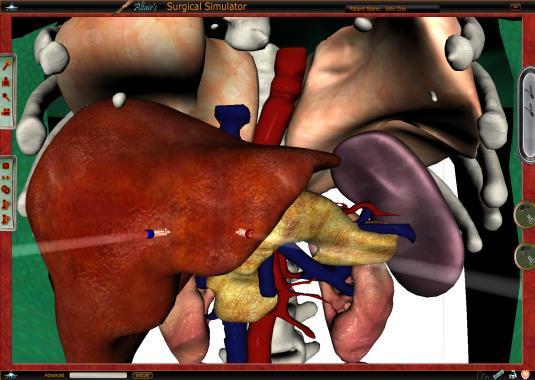
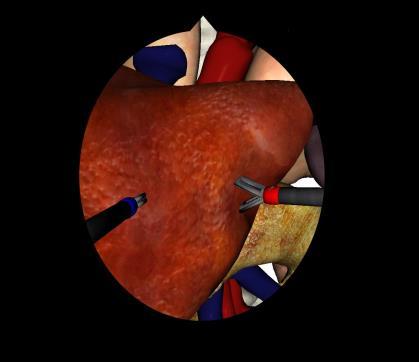
11 Application of Medical Robotics(2) Surgical Training Robots used as surgical training simulators Used for medical resident students Residents lack expertise and this helps in avoiding legal, social and economic problems Actaeon Robotic Surgery Training Console Actaeon Console is the answer to what is currently missing in Robotic Surgery education: an easy trasportable and easy setup console which perfectly simulate the feedback of a da Vinci console. With it you can trasform your standard computer classroom into an hi-tech robotics surgery training classroom, where every student can find his space to train and practice on this exciting Surgery field.

12 Application of Medical Robotics(3) Rehabilitation Assistive robots Wheelchair with intelligent navigational control system


13 Application of Medical Robotics(4) Telesurgery Surgeon sits at a console Has controls to move the robotic arms Does not operate on the patient directly Mainly used in minimally invasive surgeries New York Strasbourg Lindbergh operation was a complete tele-surgical operation carried out by a team of French surgeons located in New York on a patient in Strasbourg, France (over a distance of several thousand miles) using telecommunications solutions based on high-speed services and sophisticated Zeus surgical robot. The operation was performed successfully on September 7, 2001 by Professor Jacques Marescaux
14 Application of Medical Robotics(5) Laparoscopic Surgery Traditional laparoscope instruments have limitations Has 4 DOFs - Arbitrary orientation of instrument tip not possible Reduction in dexterity Reduction in motion reversal due to fulcrum at entry point Friction at air tight trocar reduction in force feedback Lack of tactile sensing
15 Design of Robotic Telesurgery(1) Minimally Invasive Surgery Surgery performed by making small incisions < 10mm dia Reduces post-operative pain and hospital stays Form of telemanipulation Instruments have a camera attached to transmit inside image to the surgeon

16 Design of Robotic Telesurgery(2) The Concept Telesurgical system concept
17 Design of Robotic Telesurgery(3) Considerations: Human-Machine Interface Video system used to capture images inside the patient Backlash-loss of motion between a set of movable parts Choose the appropriate mechanism for the required transmission Choose passive gravity balance over active gravity balance
18 Design of Robotic Telesurgery(4) Haptic Feedback Sensation of touch lost in robotic surgery Receiving haptic information and using it to control the robotic manipulators Needed to achieve high fidelity Types Force (kinesthetic) feedback Tactile (cutaneous) feedback
 First Robotic")


19 Historic Companies and Systems(1) First Robotic assisted surgery 1988 PUMA 560 Light duty industrial robotic arm to guide laser/needle for sterotactic brain surgery

20 Historic Companies and Systems(2) First Robotic urological surgery 1992 PROBOT-assisted TURP in Guy s Hospital in London
 First commercially")

21 Historic Companies and Systems(3) First commercially available robotic system, 1992 ROBODOC for orthopaedic hip surgery
, 1994 Automated Endoscopic")

 Marketed in 1998 ZEUS")
22 Historic Companies and Systems(4) AESOP (Computer Motion), 1994 Automated Endoscopic System for Optimal Positioning a voice-activated robotic arm for camera holder First approved surgical robotic system by FDA ZEUS (Computer Motion) Marketed in 1998 ZEUS Altair Robotics Lab, Verona
, Altair Robotics Lab")
23 Existing surgical systems(1) Da Vinci (Intuitive Surgical) Initially developed by US Department of Defence in 1991 Intuitive Surgical acquired the prototype and commercialized the system Approved by FDA in July 2000 DaVinci Research Kit (DVRK), Altair Robotics Lab (Verona)






")


24 Existing surgical systems(2) da Vinci Xi Product Development da Vinci Si 2009 Collaborative surgery Full HD vision Better Ergonomicity Modifiable Architecture da Vinci S 2006 HD Vision (720P) Input video Multi-Quadrant Access Better set-up da Vinci Standard VISIONE 3D 4 th arm introduction 1998




25 Existing surgical systems(3) Robot davinci - components Patient System Vision System Surgical Consolle Second Consolle







26 Existing surgical systems(4) davinci Master Station Visor 3D HD 2 independant optical channels Master Operator input with tremor filtering Pedals Management of vision and tools Ergonomic settings


27 Existing surgical systems(5) davinci Slave Station Camera Arm 3D optics installed on the arm; no tremor and stable vision Instrument Arm - Hard Remote Center of Compliance - Endowrist Instruments
28 Existing surgical systems(6) Advantages of Da Vinci Surgical : Technically Patented Endowrist: 6 degrees of movement 3-D vision (Dual channel endoscopy) and magnified view (x12) Tremor suppression and scaling of movement Surgeon Ergonomic advantage Shorter learning curve Patient Better outcome


29 Existing surgical systems(7) Advantages: A surgical robot combines the small instrument size of laparoscopic surgery, with the hand dexterity and visual perception of open surgery. These features allowed a significant improvement in surgical performance especially where laparascopic technique was not too high.
 6 degree")
30 Existing surgical systems(8) 6 degree movements
 Da Vinci")

31 Existing surgical systems(9) Da Vinci surgical system in a general procedure setting

32 Existing surgical systems(10)

33 Existing surgical systems(11)
34 Strengths and Limitations(1) Strengths: Physical separation Wrist action Tremor elimination Optional motion scaling Three-dimensional stereoscopic image Electronic information transfer (Telesurgery)
35 Strengths and Limitations(2) Limitation Reluctance to accept this technology (trust) Additional training Fail proof? Most of the sensors use IR transmission Highly efficient visual instruments are needed Cannot be pre-programmed Task-specific robots are required Latency in transmission of mechanical movements by the surgeon Longer operating time
36 Strengths and Limitations(3) Limitation Cost for the Da Vinci system: The average base cost of a System is $1.5 million Approximately $ 160,000 maintenance cost a year Operating room cost, $150 per hour Hospital stay cost, $600 per day Time away from work, $120 per day
37 Ethical and Safety Considerations When there is a marginal benefit from using robots, is it ethical to impose financial burden on patients or medical systems? If a robot-assisted surgery fails because of technical problems, is it the surgeon who is responsible or others?

")
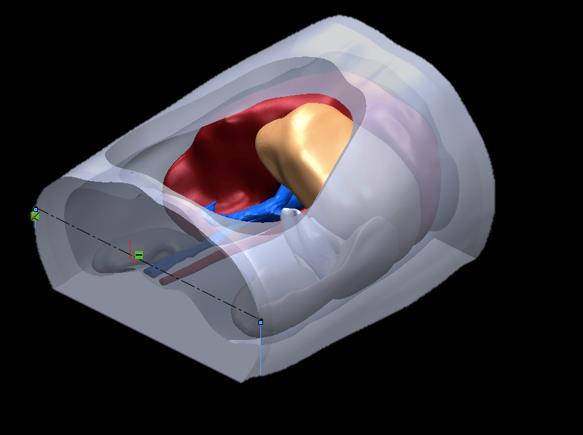
38 On-going research projects in Verona (1) The MURAB project has the ambition to drastically improve precision of diagnostic biopsies and effectiveness of the workflow, reducing the usage of expensive Magnetic Resonance Imaging (MRI) to a minimum and at the same time yield the same precision during samples targeting due to a novel MRI-Ultrasound (US) registration.
 without the need of an expert assistant surgeon, thereby increasing the social and economic efficiency of a hospital while guaranteeing")
39 On-going research projects in Verona (2) SARAS - Smart Autonomous Robotic Assistant Surgeon The goal of SARAS is to develop the next-generation of surgical robotic systems that will allow a single surgeon to execute Robotic Minimally Invasive Surgery (R-MIS) without the need of an expert assistant surgeon, thereby increasing the social and economic efficiency of a hospital while guaranteeing the same level of safety for patients.

40 On-going research projects in Verona (3) The ARS project aims at making the scientific advances that will enable the autonomous execution of complete procedures in uncertain and partially unknown environments.
41 Challenges, Future and Conclusion Haptic feedback A safe, easy sterilizable, accurate, cheap and compact robot Reliable telesurgical capabilities Compatibility with available medical equipment and standardizing Autonomous robot surgeons

42 Challenges, Future and Conclusion Automation: The ability to carry out a task repetitively, without human intervention. Tasks are well defined, actions are governed by a set of well defined rules, the environment is well known and structured. Adaptation is bounded and pre-programmed. Autonomoy: The ability to carry out a task without human intervention and to make cognitive decisions about the task. Tasks are defined in general terms, actions are are governed by learning and adapting previous knowledge to current situations, the environment can be changing, uncertain and not predictable a priori. Adaptive actions are not pre-programmed.
Medical Robotics. Part II: SURGICAL ROBOTICS
 5 Medical Robotics Part II: SURGICAL ROBOTICS In the last decade, surgery and robotics have reached a maturity that has allowed them to be safely assimilated to create a new kind of operating room. This
5 Medical Robotics Part II: SURGICAL ROBOTICS In the last decade, surgery and robotics have reached a maturity that has allowed them to be safely assimilated to create a new kind of operating room. This
Computer Assisted Medical Interventions
 Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Haptic Feedback in Laparoscopic and Robotic Surgery
 Haptic Feedback in Laparoscopic and Robotic Surgery Dr. Warren Grundfest Professor Bioengineering, Electrical Engineering & Surgery UCLA, Los Angeles, California Acknowledgment This Presentation & Research
Haptic Feedback in Laparoscopic and Robotic Surgery Dr. Warren Grundfest Professor Bioengineering, Electrical Engineering & Surgery UCLA, Los Angeles, California Acknowledgment This Presentation & Research
Robots in the Field of Medicine
 Robots in the Field of Medicine Austin Gillis and Peter Demirdjian Malden Catholic High School 1 Pioneers Robots in the Field of Medicine The use of robots in medicine is where it is today because of four
Robots in the Field of Medicine Austin Gillis and Peter Demirdjian Malden Catholic High School 1 Pioneers Robots in the Field of Medicine The use of robots in medicine is where it is today because of four
Surgical robot simulation with BBZ console
 Review Article on Thoracic Surgery Surgical robot simulation with BBZ console Francesco Bovo 1, Giacomo De Rossi 2, Francesco Visentin 2,3 1 BBZ srl, Verona, Italy; 2 Department of Computer Science, Università
Review Article on Thoracic Surgery Surgical robot simulation with BBZ console Francesco Bovo 1, Giacomo De Rossi 2, Francesco Visentin 2,3 1 BBZ srl, Verona, Italy; 2 Department of Computer Science, Università
Surgical Assist Devices & Systems aka Surgical Robots
 Surgical Assist Devices & Systems aka Surgical Robots D. J. McMahon 150125 rev cewood 2018-01-19 Key Points Surgical Assist Devices & Systems: Understand why the popular name robot isn t accurate for Surgical
Surgical Assist Devices & Systems aka Surgical Robots D. J. McMahon 150125 rev cewood 2018-01-19 Key Points Surgical Assist Devices & Systems: Understand why the popular name robot isn t accurate for Surgical
Medical Robots. Healing and Helping. Monika and Wen
 Medical Robots Healing and Helping Monika and Wen Index Definition My definition For what? History Other facts C' Arm Telediagnosis MRI Robitom Nursery Robotic Surgery Telesurgery Advantages & Disadvantages
Medical Robots Healing and Helping Monika and Wen Index Definition My definition For what? History Other facts C' Arm Telediagnosis MRI Robitom Nursery Robotic Surgery Telesurgery Advantages & Disadvantages
SMart wearable Robotic Teleoperated surgery
 SMart wearable Robotic Teleoperated surgery This project has received funding from the European Union s Horizon 2020 research and innovation programme under grant agreement No 732515 Context Minimally
SMart wearable Robotic Teleoperated surgery This project has received funding from the European Union s Horizon 2020 research and innovation programme under grant agreement No 732515 Context Minimally
da Vinci Skills Simulator
 da Vinci Skills Simulator Introducing Simulation for the da Vinci Surgical System Skills Practice in an Immersive Virtual Environment Portable. Practical. Powerful. The da Vinci Skills Simulator contains
da Vinci Skills Simulator Introducing Simulation for the da Vinci Surgical System Skills Practice in an Immersive Virtual Environment Portable. Practical. Powerful. The da Vinci Skills Simulator contains
Novel machine interface for scaled telesurgery
 Novel machine interface for scaled telesurgery S. Clanton, D. Wang, Y. Matsuoka, D. Shelton, G. Stetten SPIE Medical Imaging, vol. 5367, pp. 697-704. San Diego, Feb. 2004. A Novel Machine Interface for
Novel machine interface for scaled telesurgery S. Clanton, D. Wang, Y. Matsuoka, D. Shelton, G. Stetten SPIE Medical Imaging, vol. 5367, pp. 697-704. San Diego, Feb. 2004. A Novel Machine Interface for
Small Occupancy Robotic Mechanisms for Endoscopic Surgery
 Small Occupancy Robotic Mechanisms for Endoscopic Surgery Yuki Kobayashi, Shingo Chiyoda, Kouichi Watabe, Masafumi Okada, and Yoshihiko Nakamura Department of Mechano-Informatics, The University of Tokyo,
Small Occupancy Robotic Mechanisms for Endoscopic Surgery Yuki Kobayashi, Shingo Chiyoda, Kouichi Watabe, Masafumi Okada, and Yoshihiko Nakamura Department of Mechano-Informatics, The University of Tokyo,
Chapter 1. Introduction
 Chapter 1 Introduction Robotics technology has recently found extensive use in surgical and therapeutic procedures. The purpose of this chapter is to give an overview of the robotic tools which may be
Chapter 1 Introduction Robotics technology has recently found extensive use in surgical and therapeutic procedures. The purpose of this chapter is to give an overview of the robotic tools which may be
Using Simulation to Design Control Strategies for Robotic No-Scar Surgery
 Using Simulation to Design Control Strategies for Robotic No-Scar Surgery Antonio DE DONNO 1, Florent NAGEOTTE, Philippe ZANNE, Laurent GOFFIN and Michel de MATHELIN LSIIT, University of Strasbourg/CNRS,
Using Simulation to Design Control Strategies for Robotic No-Scar Surgery Antonio DE DONNO 1, Florent NAGEOTTE, Philippe ZANNE, Laurent GOFFIN and Michel de MATHELIN LSIIT, University of Strasbourg/CNRS,
Robotics, telepresence and minimal access surgery - A short and selective history
 Robotics, telepresence and minimal access surgery - A short and selective history Luke Hares, Technology Director, Cambridge Medical Robotics P-306v2.0 Overview o Disclaimer! o Highlights of robotics and
Robotics, telepresence and minimal access surgery - A short and selective history Luke Hares, Technology Director, Cambridge Medical Robotics P-306v2.0 Overview o Disclaimer! o Highlights of robotics and
Evaluation of Haptic Virtual Fixtures in Psychomotor Skill Development for Robotic Surgical Training
 Department of Electronics, Information and Bioengineering Neuroengineering and medical robotics Lab Evaluation of Haptic Virtual Fixtures in Psychomotor Skill Development for Robotic Surgical Training
Department of Electronics, Information and Bioengineering Neuroengineering and medical robotics Lab Evaluation of Haptic Virtual Fixtures in Psychomotor Skill Development for Robotic Surgical Training
Robotics for Telesurgery
 Robotics for Telesurgery Divya Salian Final year MCA student from Deccan Education Society s Navinchandra Mehta Institute of Technology & Development. Abstract: We as human beings have always been dissatisfied
Robotics for Telesurgery Divya Salian Final year MCA student from Deccan Education Society s Navinchandra Mehta Institute of Technology & Development. Abstract: We as human beings have always been dissatisfied
1 May Telesurgery with haptic sensation: The future of surgery. Michael Stark The New European Surgical Academy (NESA)
") 1 May 2014 Telesurgery with haptic sensation: The future of surgery Michael Stark The New European Surgical Academy (NESA) Disclosure Michael Stark is the scientific advisor for the EU/SOFAR European Telesurgical
1 May 2014 Telesurgery with haptic sensation: The future of surgery Michael Stark The New European Surgical Academy (NESA) Disclosure Michael Stark is the scientific advisor for the EU/SOFAR European Telesurgical
Robotic System Simulation and Modeling Stefan Jörg Robotic and Mechatronic Center
 Robotic System Simulation and ing Stefan Jörg Robotic and Mechatronic Center Outline Introduction The SAFROS Robotic System Simulator Robotic System ing Conclusions Folie 2 DLR s Mirosurge: A versatile
Robotic System Simulation and ing Stefan Jörg Robotic and Mechatronic Center Outline Introduction The SAFROS Robotic System Simulator Robotic System ing Conclusions Folie 2 DLR s Mirosurge: A versatile
TREND OF SURGICAL ROBOT TECHNOLOGY AND ITS INDUSTRIAL OUTLOOK
 TREND OF SURGICAL ROBOT TECHNOLOGY AND ITS INDUSTRIAL OUTLOOK BYUNG-JU YI Electronic Systems Engineering Department, Hanyang University, Korea E-mail: bj@hanyang.ac.kr Abstract - Since the launch of the
TREND OF SURGICAL ROBOT TECHNOLOGY AND ITS INDUSTRIAL OUTLOOK BYUNG-JU YI Electronic Systems Engineering Department, Hanyang University, Korea E-mail: bj@hanyang.ac.kr Abstract - Since the launch of the
2D, 3D CT Intervention, and CT Fluoroscopy
 2D, 3D CT Intervention, and CT Fluoroscopy SOMATOM Definition, Definition AS, Definition Flash Answers for life. Siemens CT Vision Siemens CT Vision The justification for the existence of the entire medical
2D, 3D CT Intervention, and CT Fluoroscopy SOMATOM Definition, Definition AS, Definition Flash Answers for life. Siemens CT Vision Siemens CT Vision The justification for the existence of the entire medical
Scopis Hybrid Navigation with Augmented Reality
 Scopis Hybrid Navigation with Augmented Reality Intelligent navigation systems for head surgery www.scopis.com Scopis Hybrid Navigation One System. Optical and electromagnetic measurement technology. As
Scopis Hybrid Navigation with Augmented Reality Intelligent navigation systems for head surgery www.scopis.com Scopis Hybrid Navigation One System. Optical and electromagnetic measurement technology. As
Robots for Medicine and Personal Assistance. Guest lecturer: Ron Alterovitz
 Robots for Medicine and Personal Assistance Guest lecturer: Ron Alterovitz Growth of Robotics Industry Worldwide $70 $56 Market Size (Billions) $42 $28 $14 $0 1995 2000 2005 2010 2015 2020 2025 Source:
Robots for Medicine and Personal Assistance Guest lecturer: Ron Alterovitz Growth of Robotics Industry Worldwide $70 $56 Market Size (Billions) $42 $28 $14 $0 1995 2000 2005 2010 2015 2020 2025 Source:
RENDERING MEDICAL INTERVENTIONS VIRTUAL AND ROBOT
 RENDERING MEDICAL INTERVENTIONS VIRTUAL AND ROBOT Lavinia Ioana Săbăilă Doina Mortoiu Theoharis Babanatsas Aurel Vlaicu Arad University, e-mail: lavyy_99@yahoo.com Aurel Vlaicu Arad University, e mail:
RENDERING MEDICAL INTERVENTIONS VIRTUAL AND ROBOT Lavinia Ioana Săbăilă Doina Mortoiu Theoharis Babanatsas Aurel Vlaicu Arad University, e-mail: lavyy_99@yahoo.com Aurel Vlaicu Arad University, e mail:
Open surgery SIMULATION
 Open surgery SIMULATION ossimtech.com A note from the President and Co-Founder, Mr. André Blain Medical education and surgical training are going through exciting changes these days. Fast-paced innovation
Open surgery SIMULATION ossimtech.com A note from the President and Co-Founder, Mr. André Blain Medical education and surgical training are going through exciting changes these days. Fast-paced innovation
Transforming Surgical Robotics. 34 th Annual J.P. Morgan Healthcare Conference January 14, 2016
 1 Transforming Surgical Robotics 34 th Annual J.P. Morgan Healthcare Conference January 14, 2016 Forward Looking Statements 2 This presentation includes statements relating to TransEnterix s current regulatory
1 Transforming Surgical Robotics 34 th Annual J.P. Morgan Healthcare Conference January 14, 2016 Forward Looking Statements 2 This presentation includes statements relating to TransEnterix s current regulatory
An Inexpensive Experimental Setup for Teaching The Concepts of Da Vinci Surgical Robot
 An Inexpensive Experimental Setup for Teaching The Concepts of Da Vinci Surgical Robot S.Vignesh kishan kumar 1, G. Anitha 2 1 M.TECH Biomedical Engineering, SRM University, Chennai 2 Assistant Professor,
An Inexpensive Experimental Setup for Teaching The Concepts of Da Vinci Surgical Robot S.Vignesh kishan kumar 1, G. Anitha 2 1 M.TECH Biomedical Engineering, SRM University, Chennai 2 Assistant Professor,
Haptic Feedback in Robot Assisted Minimal Invasive Surgery
 K. Bhatia Haptic Feedback in Robot Assisted Minimal Invasive Surgery 1 / 33 MIN Faculty Department of Informatics Haptic Feedback in Robot Assisted Minimal Invasive Surgery Kavish Bhatia University of
K. Bhatia Haptic Feedback in Robot Assisted Minimal Invasive Surgery 1 / 33 MIN Faculty Department of Informatics Haptic Feedback in Robot Assisted Minimal Invasive Surgery Kavish Bhatia University of
Autonomous Surgical Robotics
 Nicolás Pérez de Olaguer Santamaría Autonomous Surgical Robotics 1 / 29 MIN Faculty Department of Informatics Autonomous Surgical Robotics Nicolás Pérez de Olaguer Santamaría University of Hamburg Faculty
Nicolás Pérez de Olaguer Santamaría Autonomous Surgical Robotics 1 / 29 MIN Faculty Department of Informatics Autonomous Surgical Robotics Nicolás Pérez de Olaguer Santamaría University of Hamburg Faculty
Computer Assisted Abdominal
 Computer Assisted Abdominal Surgery and NOTES Prof. Luc Soler, Prof. Jacques Marescaux University of Strasbourg, France In the past IRCAD Strasbourg + Taiwain More than 3.000 surgeons trained per year,,
Computer Assisted Abdominal Surgery and NOTES Prof. Luc Soler, Prof. Jacques Marescaux University of Strasbourg, France In the past IRCAD Strasbourg + Taiwain More than 3.000 surgeons trained per year,,
Creating an Infrastructure to Address HCMDSS Challenges Introduction Enabling Technologies for Future Medical Devices
 Creating an Infrastructure to Address HCMDSS Challenges Peter Kazanzides and Russell H. Taylor Center for Computer-Integrated Surgical Systems and Technology (CISST ERC) Johns Hopkins University, Baltimore
Creating an Infrastructure to Address HCMDSS Challenges Peter Kazanzides and Russell H. Taylor Center for Computer-Integrated Surgical Systems and Technology (CISST ERC) Johns Hopkins University, Baltimore
FALL 2014, Issue No. 32 ROBOTICS AT OUR FINGERTIPS
 FALL 2014, Issue No. 32 ROBOTICS AT OUR FINGERTIPS FALL 2014 Issue No. 32 12 CYBERSECURITY SOLUTION NSF taps UCLA Engineering to take lead in encryption research. Cover Photo: Joanne Leung 6MAN AND MACHINE
FALL 2014, Issue No. 32 ROBOTICS AT OUR FINGERTIPS FALL 2014 Issue No. 32 12 CYBERSECURITY SOLUTION NSF taps UCLA Engineering to take lead in encryption research. Cover Photo: Joanne Leung 6MAN AND MACHINE
Università di Roma La Sapienza. Medical Robotics. A Teleoperation System for Research in MIRS. Marilena Vendittelli
 Università di Roma La Sapienza Medical Robotics A Teleoperation System for Research in MIRS Marilena Vendittelli the DLR teleoperation system slave three versatile robots MIRO light-weight: weight < 10
Università di Roma La Sapienza Medical Robotics A Teleoperation System for Research in MIRS Marilena Vendittelli the DLR teleoperation system slave three versatile robots MIRO light-weight: weight < 10
HUMAN Robot Cooperation Techniques in Surgery
 HUMAN Robot Cooperation Techniques in Surgery Alícia Casals Institute for Bioengineering of Catalonia (IBEC), Universitat Politècnica de Catalunya (UPC), Barcelona, Spain alicia.casals@upc.edu Keywords:
HUMAN Robot Cooperation Techniques in Surgery Alícia Casals Institute for Bioengineering of Catalonia (IBEC), Universitat Politècnica de Catalunya (UPC), Barcelona, Spain alicia.casals@upc.edu Keywords:
Telemanipulation and Telestration for Microsurgery Summary
 Telemanipulation and Telestration for Microsurgery Summary Microsurgery presents an array of problems. For instance, current methodologies of Eye Surgery requires freehand manipulation of delicate structures
Telemanipulation and Telestration for Microsurgery Summary Microsurgery presents an array of problems. For instance, current methodologies of Eye Surgery requires freehand manipulation of delicate structures
Óbuda University (OU) European Robotics Forum 2016 Ljubljana, Slovenia
 European Robotics Forum 2016 Ljubljana, Slovenia") Óbuda University (OU) European Robotics Forum 2016 Ljubljana, Slovenia Rising surgical robots 2 Google + Johnson & Johnson Virtual Incision 3 University of Nebraska spin-off D. Oleynikov et al. Since 2008
Óbuda University (OU) European Robotics Forum 2016 Ljubljana, Slovenia Rising surgical robots 2 Google + Johnson & Johnson Virtual Incision 3 University of Nebraska spin-off D. Oleynikov et al. Since 2008
Application of Force Feedback in Robot Assisted Minimally Invasive Surgery
 Application of Force Feedback in Robot Assisted Minimally Invasive Surgery István Nagy, Hermann Mayer, and Alois Knoll Technische Universität München, 85748 Garching, Germany, {nagy mayerh knoll}@in.tum.de,
Application of Force Feedback in Robot Assisted Minimally Invasive Surgery István Nagy, Hermann Mayer, and Alois Knoll Technische Universität München, 85748 Garching, Germany, {nagy mayerh knoll}@in.tum.de,
VIABILITY OF TELEMEDICAL REMOTE ROBOTIC SYSTEMS. University of Stellenbosch University, South Africa
 VIABILITY OF TELEMEDICAL REMOTE ROBOTIC SYSTEMS A. Smit 1* and Dr. A.F. van der Merwe 2 1 Department of Industrial Engineering University of Stellenbosch University, South Africa 14925435@sun.ac.za 2 Department
VIABILITY OF TELEMEDICAL REMOTE ROBOTIC SYSTEMS A. Smit 1* and Dr. A.F. van der Merwe 2 1 Department of Industrial Engineering University of Stellenbosch University, South Africa 14925435@sun.ac.za 2 Department
Medical Robotics LBR Med
 Medical Robotics LBR Med EN KUKA, a proven robotics partner. Discerning users around the world value KUKA as a reliable partner. KUKA has branches in over 30 countries, and for over 40 years, we have been
Medical Robotics LBR Med EN KUKA, a proven robotics partner. Discerning users around the world value KUKA as a reliable partner. KUKA has branches in over 30 countries, and for over 40 years, we have been
DEVELOPING SENSORS FOR SURGERY SUPPORT ROBOTS Mona Kudo
 DEVELOPING SENSORS FOR SURGERY SUPPORT ROBOTS 20328 Mona Kudo 1. INTRODUCTION Today, many kinds of surgery support robots are used in medical procedures all over economically advanced countries such as
DEVELOPING SENSORS FOR SURGERY SUPPORT ROBOTS 20328 Mona Kudo 1. INTRODUCTION Today, many kinds of surgery support robots are used in medical procedures all over economically advanced countries such as
Digital Reality TM changes everything
 F E B R U A R Y 2 0 1 8 Digital Reality TM changes everything Step into the future What are we talking about? Virtual Reality VR is an entirely digital world that completely immerses the user in an environment
F E B R U A R Y 2 0 1 8 Digital Reality TM changes everything Step into the future What are we talking about? Virtual Reality VR is an entirely digital world that completely immerses the user in an environment
Job Description. Commitment: Must be available to work full-time hours, M-F for weeks beginning Summer of 2018.
 Research Intern Director of Research We are seeking a summer intern to support the team to develop prototype 3D sensing systems based on state-of-the-art sensing technologies along with computer vision
Research Intern Director of Research We are seeking a summer intern to support the team to develop prototype 3D sensing systems based on state-of-the-art sensing technologies along with computer vision
Current Status and Future of Medical Virtual Reality
 2011.08.16 Medical VR Current Status and Future of Medical Virtual Reality Naoto KUME, Ph.D. Assistant Professor of Kyoto University Hospital 1. History of Medical Virtual Reality Virtual reality (VR)
2011.08.16 Medical VR Current Status and Future of Medical Virtual Reality Naoto KUME, Ph.D. Assistant Professor of Kyoto University Hospital 1. History of Medical Virtual Reality Virtual reality (VR)
ERC: Engineering Research Center for Computer- Integrated Surgical Systems and Technology (NSF Grant # )
") ERC: Engineering Research Center for Computer- Integrated Surgical Systems and Technology (NSF Grant #9731748) MARCIN BALICKI 1, and TIAN XIA 2 1,2 Johns Hopkins University, 3400 Charles St., Baltimore,
ERC: Engineering Research Center for Computer- Integrated Surgical Systems and Technology (NSF Grant #9731748) MARCIN BALICKI 1, and TIAN XIA 2 1,2 Johns Hopkins University, 3400 Charles St., Baltimore,
AC : MEDICAL ROBOTICS LABORATORY FOR BIOMEDICAL ENGINEERS
 AC 2008-1272: MEDICAL ROBOTICS LABORATORY FOR BIOMEDICAL ENGINEERS Shahin Sirouspour, McMaster University http://www.ece.mcmaster.ca/~sirouspour/ Mahyar Fotoohi, Quanser Inc Pawel Malysz, McMaster University
AC 2008-1272: MEDICAL ROBOTICS LABORATORY FOR BIOMEDICAL ENGINEERS Shahin Sirouspour, McMaster University http://www.ece.mcmaster.ca/~sirouspour/ Mahyar Fotoohi, Quanser Inc Pawel Malysz, McMaster University
Proposal for Robot Assistance for Neurosurgery
 Proposal for Robot Assistance for Neurosurgery Peter Kazanzides Assistant Research Professor of Computer Science Johns Hopkins University December 13, 2007 Funding History Active funding for development
Proposal for Robot Assistance for Neurosurgery Peter Kazanzides Assistant Research Professor of Computer Science Johns Hopkins University December 13, 2007 Funding History Active funding for development
Virtual and Augmented Reality Applications
 Department of Engineering for Innovation University of Salento Lecce, Italy Augmented and Virtual Reality Laboratory (AVR Lab) Keynote Speech: Augmented and Virtual Reality Laboratory (AVR Lab) Keynote
Department of Engineering for Innovation University of Salento Lecce, Italy Augmented and Virtual Reality Laboratory (AVR Lab) Keynote Speech: Augmented and Virtual Reality Laboratory (AVR Lab) Keynote
Virtual and Augmented Reality techniques embedded and based on a Operative Microscope. Training for Neurosurgery.
 Virtual and Augmented Reality techniques embedded and based on a Operative Microscope. Training for Neurosurgery. 1 M. Aschke 1, M.Ciucci 1,J.Raczkowsky 1, R.Wirtz 2, H. Wörn 1 1 IPR, Institute for Process
Virtual and Augmented Reality techniques embedded and based on a Operative Microscope. Training for Neurosurgery. 1 M. Aschke 1, M.Ciucci 1,J.Raczkowsky 1, R.Wirtz 2, H. Wörn 1 1 IPR, Institute for Process
MARGE Project: Design, Modeling, and Control of Assistive Devices for Minimally Invasive Surgery
 MARGE Project: Design, Modeling, and Control of Assistive Devices for Minimally Invasive Surgery Etienne Dombre 1, Micaël Michelin 1, François Pierrot 1, Philippe Poignet 1, Philippe Bidaud 2, Guillaume
MARGE Project: Design, Modeling, and Control of Assistive Devices for Minimally Invasive Surgery Etienne Dombre 1, Micaël Michelin 1, François Pierrot 1, Philippe Poignet 1, Philippe Bidaud 2, Guillaume
Wearable Haptic Feedback Actuators for Training in Robotic Surgery
 Wearable Haptic Feedback Actuators for Training in Robotic Surgery NSF Summer Undergraduate Fellowship in Sensor Technologies Joshua Fernandez (Mechanical Eng.) University of Maryland Baltimore County
Wearable Haptic Feedback Actuators for Training in Robotic Surgery NSF Summer Undergraduate Fellowship in Sensor Technologies Joshua Fernandez (Mechanical Eng.) University of Maryland Baltimore County
Force Feedback Mechatronics in Medecine, Healthcare and Rehabilitation
 Force Feedback Mechatronics in Medecine, Healthcare and Rehabilitation J.P. Friconneau 1, P. Garrec 1, F. Gosselin 1, A. Riwan 1, 1 CEA-LIST DTSI/SRSI, CEN/FAR BP6, 92265 Fontenay-aux-Roses, France jean-pierre.friconneau@cea.fr
Force Feedback Mechatronics in Medecine, Healthcare and Rehabilitation J.P. Friconneau 1, P. Garrec 1, F. Gosselin 1, A. Riwan 1, 1 CEA-LIST DTSI/SRSI, CEN/FAR BP6, 92265 Fontenay-aux-Roses, France jean-pierre.friconneau@cea.fr
BodyViz fact sheet. BodyViz 2321 North Loop Drive, Suite 110 Ames, IA x555 www. bodyviz.com
 BodyViz fact sheet BodyViz, the company, was established in 2007 at the Iowa State University Research Park in Ames, Iowa. It was created by ISU s Virtual Reality Applications Center Director James Oliver,
BodyViz fact sheet BodyViz, the company, was established in 2007 at the Iowa State University Research Park in Ames, Iowa. It was created by ISU s Virtual Reality Applications Center Director James Oliver,
ehealth : Tools & Methods Dr. Asif Zafar
 ehealth : Tools & Methods Dr. Asif Zafar MBBS, MCPS, M.D. FRCS, FCPS Professor of Surgery, Rawalpindi Medical College Director, Telemedicine & E- Health Training Center, MIS Virtual Training Lab, Holy
ehealth : Tools & Methods Dr. Asif Zafar MBBS, MCPS, M.D. FRCS, FCPS Professor of Surgery, Rawalpindi Medical College Director, Telemedicine & E- Health Training Center, MIS Virtual Training Lab, Holy
Methods for Haptic Feedback in Teleoperated Robotic Surgery
 Young Group 5 1 Methods for Haptic Feedback in Teleoperated Robotic Surgery Paper Review Jessie Young Group 5: Haptic Interface for Surgical Manipulator System March 12, 2012 Paper Selection: A. M. Okamura.
Young Group 5 1 Methods for Haptic Feedback in Teleoperated Robotic Surgery Paper Review Jessie Young Group 5: Haptic Interface for Surgical Manipulator System March 12, 2012 Paper Selection: A. M. Okamura.
MECHANICAL DESIGN LEARNING ENVIRONMENTS BASED ON VIRTUAL REALITY TECHNOLOGIES
 INTERNATIONAL CONFERENCE ON ENGINEERING AND PRODUCT DESIGN EDUCATION 4 & 5 SEPTEMBER 2008, UNIVERSITAT POLITECNICA DE CATALUNYA, BARCELONA, SPAIN MECHANICAL DESIGN LEARNING ENVIRONMENTS BASED ON VIRTUAL
INTERNATIONAL CONFERENCE ON ENGINEERING AND PRODUCT DESIGN EDUCATION 4 & 5 SEPTEMBER 2008, UNIVERSITAT POLITECNICA DE CATALUNYA, BARCELONA, SPAIN MECHANICAL DESIGN LEARNING ENVIRONMENTS BASED ON VIRTUAL
A Virtual Framework for Semi-Autonomous Robotic Surgery using Real-Time Spatial Mapping
 A Virtual Framework for Semi-Autonomous Robotic Surgery using Real-Time Spatial Mapping A thesis submitted to the Graduate School of the University of Cincinnati in partial fulfillment of the requirements
A Virtual Framework for Semi-Autonomous Robotic Surgery using Real-Time Spatial Mapping A thesis submitted to the Graduate School of the University of Cincinnati in partial fulfillment of the requirements
GYN / US. VITOM A Unique Visualization System for Vaginal Hysterectomy in the Operating Room
 GYN 1.0 03/2016-6-US VITOM A Unique Visualization System for Vaginal Hysterectomy in the Operating Room The VITOM System for your Exoscopy in the Operating Room Dear Colleagues, When feasible, the vaginal
GYN 1.0 03/2016-6-US VITOM A Unique Visualization System for Vaginal Hysterectomy in the Operating Room The VITOM System for your Exoscopy in the Operating Room Dear Colleagues, When feasible, the vaginal
Model Based Design Of Medical Devices
 Model Based Design Of Medical Devices A Tata Elxsi Perspective Tata Elxsi s Solutions - Medical Electronics Abstract Modeling and Simulation (M&S) is an important tool that may be employed in the end-to-end
Model Based Design Of Medical Devices A Tata Elxsi Perspective Tata Elxsi s Solutions - Medical Electronics Abstract Modeling and Simulation (M&S) is an important tool that may be employed in the end-to-end
What could be driving the Lab of the future and is the Smart Lab really a thing?
 What could be driving the Lab of the future and is the Smart Lab really a thing? Paul Kendall Festo MedLab 28 February 2018 ELRIG Robotics & Automation, Esslingen near Stuttgart. 1 What s in store? Position
What could be driving the Lab of the future and is the Smart Lab really a thing? Paul Kendall Festo MedLab 28 February 2018 ELRIG Robotics & Automation, Esslingen near Stuttgart. 1 What s in store? Position
Balancing Safety and Cost in Robotically Assisted Surgery
 Balancing Safety and Cost in Robotically Assisted Surgery IROS 2011 LOUAI ADHAMI, PHD LADHAMI@SIMQUEST.COM Thank yous 2 ChIR & XirTek INRIA Intuitive Surgical France & USA HEGP & A. Carpentier The RNTS,
Balancing Safety and Cost in Robotically Assisted Surgery IROS 2011 LOUAI ADHAMI, PHD LADHAMI@SIMQUEST.COM Thank yous 2 ChIR & XirTek INRIA Intuitive Surgical France & USA HEGP & A. Carpentier The RNTS,
Force feedback interfaces & applications
 Force feedback interfaces & applications Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jukka Raisamo,
Force feedback interfaces & applications Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jukka Raisamo,
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Haptics Technologies: Bringing Touch to Multimedia
 Haptics Technologies: Bringing Touch to Multimedia C2: Haptics Applications Outline Haptic Evolution: from Psychophysics to Multimedia Haptics for Medical Applications Surgical Simulations Stroke-based
Haptics Technologies: Bringing Touch to Multimedia C2: Haptics Applications Outline Haptic Evolution: from Psychophysics to Multimedia Haptics for Medical Applications Surgical Simulations Stroke-based
KINECT CONTROLLED HUMANOID AND HELICOPTER
 KINECT CONTROLLED HUMANOID AND HELICOPTER Muffakham Jah College of Engineering & Technology Presented by : MOHAMMED KHAJA ILIAS PASHA ZESHAN ABDUL MAJEED AZMI SYED ABRAR MOHAMMED ISHRAQ SARID MOHAMMED
KINECT CONTROLLED HUMANOID AND HELICOPTER Muffakham Jah College of Engineering & Technology Presented by : MOHAMMED KHAJA ILIAS PASHA ZESHAN ABDUL MAJEED AZMI SYED ABRAR MOHAMMED ISHRAQ SARID MOHAMMED
Industry 4.0. Advanced and integrated SAFETY tools for tecnhical plants
 Industry 4.0 Advanced and integrated SAFETY tools for tecnhical plants Industry 4.0 Industry 4.0 is the digital transformation of manufacturing; leverages technologies, such as Big Data and Internet of
Industry 4.0 Advanced and integrated SAFETY tools for tecnhical plants Industry 4.0 Industry 4.0 is the digital transformation of manufacturing; leverages technologies, such as Big Data and Internet of
Term Paper Augmented Reality in surgery
 Universität Paderborn Fakultät für Elektrotechnik/ Informatik / Mathematik Term Paper Augmented Reality in surgery by Silke Geisen twister@upb.de 1. Introduction In the last 15 years the field of minimal
Universität Paderborn Fakultät für Elektrotechnik/ Informatik / Mathematik Term Paper Augmented Reality in surgery by Silke Geisen twister@upb.de 1. Introduction In the last 15 years the field of minimal
INDIRECT FEEDBACK OF HAPTIC INFORMATION FOR ROBOT-ASSISTED TELEMANIPULATION. by Masaya Kitagawa. Baltimore, Maryland September, 2003
 INDIRECT FEEDBACK OF HAPTIC INFORMATION FOR ROBOT-ASSISTED TELEMANIPULATION by Masaya Kitagawa A thesis submitted to the Johns Hopkins University in conformity with the requirements for the degree of Master
INDIRECT FEEDBACK OF HAPTIC INFORMATION FOR ROBOT-ASSISTED TELEMANIPULATION by Masaya Kitagawa A thesis submitted to the Johns Hopkins University in conformity with the requirements for the degree of Master
Stereoscopic Augmented Reality System for Computer Assisted Surgery
 Marc Liévin and Erwin Keeve Research center c a e s a r, Center of Advanced European Studies and Research, Surgical Simulation and Navigation Group, Friedensplatz 16, 53111 Bonn, Germany. A first architecture
Marc Liévin and Erwin Keeve Research center c a e s a r, Center of Advanced European Studies and Research, Surgical Simulation and Navigation Group, Friedensplatz 16, 53111 Bonn, Germany. A first architecture
Robots in Image-Guided Interventions
 Robots in Image-Guided Interventions Peter Kazanzides Associate Research Professor Dept. of Computer Science The Johns Hopkins University My Background 1983-1988 Ph.D. EE (Robotics), Brown University 1989-1990
Robots in Image-Guided Interventions Peter Kazanzides Associate Research Professor Dept. of Computer Science The Johns Hopkins University My Background 1983-1988 Ph.D. EE (Robotics), Brown University 1989-1990
TRENDS IN SURGICAL ROBOTICS
 TRENDS IN SURGICAL ROBOTICS HANNES BLEULER, MOHAMED BOURI, LAURA SANTOS-CARRERAS, SIMON GALLO, ALI SENGÜL, GIULIO ROGNINI, REYMOND CLAVEL * Abstract. Surgical Robotics today is essentially about two families
TRENDS IN SURGICAL ROBOTICS HANNES BLEULER, MOHAMED BOURI, LAURA SANTOS-CARRERAS, SIMON GALLO, ALI SENGÜL, GIULIO ROGNINI, REYMOND CLAVEL * Abstract. Surgical Robotics today is essentially about two families
Robotic Surgery Robotic Surgery. Dept of Electronics M. E. S College Marampally
 1 ABSTRACT J ust as computers revolutionized the latter half of the 20th century, the field of robotics has the potential to equally alter how we live in the 21st century. Robotics is being introduced
1 ABSTRACT J ust as computers revolutionized the latter half of the 20th century, the field of robotics has the potential to equally alter how we live in the 21st century. Robotics is being introduced
Using Web-Based Computer Graphics to Teach Surgery
 Using Web-Based Computer Graphics to Teach Surgery Ken Brodlie Nuha El-Khalili Ying Li School of Computer Studies University of Leeds Position Paper for GVE99, Coimbra, Portugal Surgical Training Surgical
Using Web-Based Computer Graphics to Teach Surgery Ken Brodlie Nuha El-Khalili Ying Li School of Computer Studies University of Leeds Position Paper for GVE99, Coimbra, Portugal Surgical Training Surgical
Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery
 Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery Claudio Pacchierotti Domenico Prattichizzo Katherine J. Kuchenbecker Motivation Despite its expected clinical
Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery Claudio Pacchierotti Domenico Prattichizzo Katherine J. Kuchenbecker Motivation Despite its expected clinical
Measurements of the Level of Surgical Expertise Using Flight Path Analysis from da Vinci Robotic Surgical System
 Measurements of the Level of Surgical Expertise Using Flight Path Analysis from da Vinci Robotic Surgical System Lawton Verner 1, Dmitry Oleynikov, MD 1, Stephen Holtmann 1, Hani Haider, Ph D 1, Leonid
Measurements of the Level of Surgical Expertise Using Flight Path Analysis from da Vinci Robotic Surgical System Lawton Verner 1, Dmitry Oleynikov, MD 1, Stephen Holtmann 1, Hani Haider, Ph D 1, Leonid
Towards robotic heart surgery: Introduction of autonomous procedures into an experimental surgical telemanipulator system
 74 ORIGINAL ARTICLE Towards robotic heart surgery: Introduction of autonomous procedures into an experimental surgical telemanipulator system R Bauernschmitt*, E U Schirmbeck*, A Knoll, H Mayer, I Nagy,
74 ORIGINAL ARTICLE Towards robotic heart surgery: Introduction of autonomous procedures into an experimental surgical telemanipulator system R Bauernschmitt*, E U Schirmbeck*, A Knoll, H Mayer, I Nagy,
Les apports de la robotique collaborative en santé
 Les apports de la robotique collaborative en santé Guillaume Morel Institut des Systèmes Intelligents et de Robotique Université Pierre et Marie Curie, CNRS UMR 7222 INSERM U1150 Assistance aux Gestes
Les apports de la robotique collaborative en santé Guillaume Morel Institut des Systèmes Intelligents et de Robotique Université Pierre et Marie Curie, CNRS UMR 7222 INSERM U1150 Assistance aux Gestes
Enhancing Shipboard Maintenance with Augmented Reality
 Enhancing Shipboard Maintenance with Augmented Reality CACI Oxnard, CA Dennis Giannoni dgiannoni@caci.com (805) 288-6630 INFORMATION DEPLOYED. SOLUTIONS ADVANCED. MISSIONS ACCOMPLISHED. Agenda Virtual
Enhancing Shipboard Maintenance with Augmented Reality CACI Oxnard, CA Dennis Giannoni dgiannoni@caci.com (805) 288-6630 INFORMATION DEPLOYED. SOLUTIONS ADVANCED. MISSIONS ACCOMPLISHED. Agenda Virtual
Tactile Interactions During Robot Assisted Surgical Interventions. Lakmal Seneviratne
 Tactile Interactions During Robot Assisted Surgical Interventions Lakmal Seneviratne Professor of Mechatronics Kings College London Professor of Mechanical Eng. Khalifa Univeristy, Abu Dhabi. 1 Overview
Tactile Interactions During Robot Assisted Surgical Interventions Lakmal Seneviratne Professor of Mechatronics Kings College London Professor of Mechanical Eng. Khalifa Univeristy, Abu Dhabi. 1 Overview
Distributed Robotics: Building an environment for digital cooperation. Artificial Intelligence series
 Distributed Robotics: Building an environment for digital cooperation Artificial Intelligence series Distributed Robotics March 2018 02 From programmable machines to intelligent agents Robots, from the
Distributed Robotics: Building an environment for digital cooperation Artificial Intelligence series Distributed Robotics March 2018 02 From programmable machines to intelligent agents Robots, from the
Epona Medical simulation products catalog Version 1.0
 Epona Medical simulation products catalog Version 1.0 Simulator for laparoscopic surgery Simulator for Arthroscopic surgery Simulator for infant patient critical care Simulator for vascular procedures
Epona Medical simulation products catalog Version 1.0 Simulator for laparoscopic surgery Simulator for Arthroscopic surgery Simulator for infant patient critical care Simulator for vascular procedures
VOLISTA. Setting the standard for operating rooms. This document is intended to provide information to an international audience outside of the US
 VOLISTA Setting the standard for operating rooms This document is intended to provide information to an international audience outside of the US 2 VOLISTA VOLISTA Stay focused on your aim The assurance
VOLISTA Setting the standard for operating rooms This document is intended to provide information to an international audience outside of the US 2 VOLISTA VOLISTA Stay focused on your aim The assurance
Surgical Robot Competition Introducing Engineering in Medicine to Pre-college Students
 Session 2793 Surgical Robot Competition Introducing Engineering in Medicine to Pre-college Students Oleg Gerovichev, Randal P. Goldberg, Ian D. Donn, Anand Viswanathan, Russell H. Taylor Department of
Session 2793 Surgical Robot Competition Introducing Engineering in Medicine to Pre-college Students Oleg Gerovichev, Randal P. Goldberg, Ian D. Donn, Anand Viswanathan, Russell H. Taylor Department of
Summer Engineering Research Internship for US Students (SERIUS) Department of Biomedical Engineering. (www.bioeng.nus.edu.
 Department of Biomedical Engineering. (www.bioeng.nus.edu.") Summer Engineering Research Internship for US Students (SERIUS) Host Department: Department of Biomedical Engineering (www.bioeng.nus.edu.sg) BME Project 1 Host department Department of Biomedical Engineering
Summer Engineering Research Internship for US Students (SERIUS) Host Department: Department of Biomedical Engineering (www.bioeng.nus.edu.sg) BME Project 1 Host department Department of Biomedical Engineering
Advanced Augmented Reality Telestration Techniques With Applications In Laparoscopic And Robotic Surgery
 Wayne State University Wayne State University Dissertations 1-1-2013 Advanced Augmented Reality Telestration Techniques With Applications In Laparoscopic And Robotic Surgery Stephen Dworzecki Wayne State
Wayne State University Wayne State University Dissertations 1-1-2013 Advanced Augmented Reality Telestration Techniques With Applications In Laparoscopic And Robotic Surgery Stephen Dworzecki Wayne State
Control and User Interface Design for Compact Manipulators in Minimally-Invasive Surgery
 Proceedings of the 5 IEEE Conference on Control Applications Toronto, Canada, August 28-31, 5 MA1.5 Control and User Interface Design for Compact Manipulators in Minimally-Invasive Surgery Peter Berkelman,
Proceedings of the 5 IEEE Conference on Control Applications Toronto, Canada, August 28-31, 5 MA1.5 Control and User Interface Design for Compact Manipulators in Minimally-Invasive Surgery Peter Berkelman,
Advanced Robotics Trends in Medical Application
 Advanced Robotics Trends in Medical Application Binay Binod Kumar 1, Ravi kant 2, Manisha Sharma 3, Munesh Devi 4, 1,3,4 Assistant professor, ECE Deptt., Gateway Institute Of Engineering & Technology 2
Advanced Robotics Trends in Medical Application Binay Binod Kumar 1, Ravi kant 2, Manisha Sharma 3, Munesh Devi 4, 1,3,4 Assistant professor, ECE Deptt., Gateway Institute Of Engineering & Technology 2
Medical Robotics in Computer-Integrated Surgery
 IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION, VOL. 19, NO. 5, OCTOBER 2003 765 Medical Robotics in Computer-Integrated Surgery Russell H. Taylor, Fellow, IEEE, and Dan Stoianovici Abstract This paper provides
IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION, VOL. 19, NO. 5, OCTOBER 2003 765 Medical Robotics in Computer-Integrated Surgery Russell H. Taylor, Fellow, IEEE, and Dan Stoianovici Abstract This paper provides
University of California, Santa Barbara. CS189 Fall 17 Capstone. VR Telemedicine. Product Requirement Documentation
 University of California, Santa Barbara CS189 Fall 17 Capstone VR Telemedicine Product Requirement Documentation Jinfa Zhu Kenneth Chan Shouzhi Wan Xiaohe He Yuanqi Li Supervised by Ole Eichhorn Helen
University of California, Santa Barbara CS189 Fall 17 Capstone VR Telemedicine Product Requirement Documentation Jinfa Zhu Kenneth Chan Shouzhi Wan Xiaohe He Yuanqi Li Supervised by Ole Eichhorn Helen
Harvard BioRobotics Laboratory Technical Report
 Harvard BioRobotics Laboratory Technical Report December 2 Virtual Fixtures for Robotic Endoscopic Surgery Fuji Lai & Robert D. Howe Division of Engineering and Applied Sciences Harvard University 323
Harvard BioRobotics Laboratory Technical Report December 2 Virtual Fixtures for Robotic Endoscopic Surgery Fuji Lai & Robert D. Howe Division of Engineering and Applied Sciences Harvard University 323
Advancing the Art of Endoscopy
 Advancing the Art of Endoscopy Advancing the Art of Endoscopy with an array of opto-digital innovations. OLYMPUS technology continues to advance the art of endoscopy. As the world leader in endoscopy,
Advancing the Art of Endoscopy Advancing the Art of Endoscopy with an array of opto-digital innovations. OLYMPUS technology continues to advance the art of endoscopy. As the world leader in endoscopy,
Haptic Feedback. A literature study on the present-day use of haptic feedback in medical robotics. A.F. Rovers September 2002 DCT Report nr
 Haptic Feedback A literature study on the present-day use of haptic feedback in medical robotics A.F. Rovers September 2002 DCT Report nr. 2002.57 TU/e Practical Traineeship Report Coaching: prof. dr.
Haptic Feedback A literature study on the present-day use of haptic feedback in medical robotics A.F. Rovers September 2002 DCT Report nr. 2002.57 TU/e Practical Traineeship Report Coaching: prof. dr.
Virtual Reality in Neuro- Rehabilitation and Beyond
 Virtual Reality in Neuro- Rehabilitation and Beyond Amanda Carr, OTRL, CBIS Origami Brain Injury Rehabilitation Center Director of Rehabilitation Amanda.Carr@origamirehab.org Objectives Define virtual
Virtual Reality in Neuro- Rehabilitation and Beyond Amanda Carr, OTRL, CBIS Origami Brain Injury Rehabilitation Center Director of Rehabilitation Amanda.Carr@origamirehab.org Objectives Define virtual
Wireless Master-Slave Embedded Controller for a Teleoperated Anthropomorphic Robotic Arm with Gripping Force Sensing
 Wireless Master-Slave Embedded Controller for a Teleoperated Anthropomorphic Robotic Arm with Gripping Force Sensing Presented by: Benjamin B. Rhoades ECGR 6185 Adv. Embedded Systems January 16 th 2013
Wireless Master-Slave Embedded Controller for a Teleoperated Anthropomorphic Robotic Arm with Gripping Force Sensing Presented by: Benjamin B. Rhoades ECGR 6185 Adv. Embedded Systems January 16 th 2013
A VR Training System with Haptic Force Feedback for the Robotic Endovascular Surge
 Proceedings of the 2018 IEEE International Conference on Robotics and Biomimetics December 12-15, 2018, Kuala Lumpur, Malaysia A VR Training System with Haptic Force Feedback for the Robotic Endovascular
Proceedings of the 2018 IEEE International Conference on Robotics and Biomimetics December 12-15, 2018, Kuala Lumpur, Malaysia A VR Training System with Haptic Force Feedback for the Robotic Endovascular
Robust Haptic Teleoperation of a Mobile Manipulation Platform
 Robust Haptic Teleoperation of a Mobile Manipulation Platform Jaeheung Park and Oussama Khatib Stanford AI Laboratory Stanford University http://robotics.stanford.edu Abstract. This paper presents a new
Robust Haptic Teleoperation of a Mobile Manipulation Platform Jaeheung Park and Oussama Khatib Stanford AI Laboratory Stanford University http://robotics.stanford.edu Abstract. This paper presents a new
Minimally invasive surgical skills evaluation in the field of otolaryngology
 Minimally invasive surgical skills evaluation in the field of otolaryngology Alejandro Cuevas 1, Daniel Lorias 1, Arturo Minor 1, Jose A. Gutierrez 2, Rigoberto Martinez 3 1 CINVESTAV-IPN, México D.F.,
Minimally invasive surgical skills evaluation in the field of otolaryngology Alejandro Cuevas 1, Daniel Lorias 1, Arturo Minor 1, Jose A. Gutierrez 2, Rigoberto Martinez 3 1 CINVESTAV-IPN, México D.F.,
Haptic Virtual Fixtures for Robot-Assisted Manipulation
 Haptic Virtual Fixtures for Robot-Assisted Manipulation Jake J. Abbott, Panadda Marayong, and Allison M. Okamura Department of Mechanical Engineering, The Johns Hopkins University {jake.abbott, pmarayong,
Haptic Virtual Fixtures for Robot-Assisted Manipulation Jake J. Abbott, Panadda Marayong, and Allison M. Okamura Department of Mechanical Engineering, The Johns Hopkins University {jake.abbott, pmarayong,
The Role of Service Robots and Robotic Systems in the Treatment of Patients in Medical Institutions
 The Role of Service Robots and Robotic Systems in the Treatment of Patients in Medical Institutions Isak Karabegović and Vlatko Doleček Abstract The development of new technologies has contributed to the
The Role of Service Robots and Robotic Systems in the Treatment of Patients in Medical Institutions Isak Karabegović and Vlatko Doleček Abstract The development of new technologies has contributed to the
ISMCR2004. Abstract. 2. The mechanism of the master-slave arm of Telesar II. 1. Introduction. D21-Page 1
 Development of Multi-D.O.F. Master-Slave Arm with Bilateral Impedance Control for Telexistence Riichiro Tadakuma, Kiyohiro Sogen, Hiroyuki Kajimoto, Naoki Kawakami, and Susumu Tachi 7-3-1 Hongo, Bunkyo-ku,
Development of Multi-D.O.F. Master-Slave Arm with Bilateral Impedance Control for Telexistence Riichiro Tadakuma, Kiyohiro Sogen, Hiroyuki Kajimoto, Naoki Kawakami, and Susumu Tachi 7-3-1 Hongo, Bunkyo-ku,
Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Politecnico di Milano - Dipartimento di Elettronica, Informazione e Bioingegneria Industrial robotics
Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Politecnico di Milano - Dipartimento di Elettronica, Informazione e Bioingegneria Industrial robotics
Why A CPRL-4 will be better than a VATS Lobectomy
 Why A CPRL-4 will be better than a VATS Lobectomy Robert J. Cerfolio, MD, FACS, FCCP JH Estes Endowed Chair Lung Ca Research Professor of Surgery Chief of Thoracic Surgery, UAB Financial Disclosures Speaker
Why A CPRL-4 will be better than a VATS Lobectomy Robert J. Cerfolio, MD, FACS, FCCP JH Estes Endowed Chair Lung Ca Research Professor of Surgery Chief of Thoracic Surgery, UAB Financial Disclosures Speaker