Robots in Image-Guided Interventions
|
|
|
- Virginia Hall
- 5 years ago
- Views:
Transcription


1 Robots in Image-Guided Interventions Peter Kazanzides Associate Research Professor Dept. of Computer Science The Johns Hopkins University
2 My Background Ph.D. EE (Robotics), Brown University Postdoctoral research at IBM on ROBODOC Co-Founder of Integrated Surgical Systems Director of Robotics and Software Commercial development of ROBODOC System Sales in Europe (CE Mark) and Asia Clinical trials in U.S. and Japan 2002-present Research faculty at JHU Leader of CISST ERC engineering infrastructure Research in use of robotics for neurosurgery, cancer research and therapy, telesurgery, microsurgery,
3 Disclaimer Dr. Kazanzides currently receives research support from Curexo Technology, manufacturer of the Robodoc System, and has served as a consultant to the company.

 Hackerman")

4 Laboratory for Computational Sensing and Robotics (LCSR) Hackerman Hall Swirnow Mock Operating Room Robotorium (shared lab)





5 What is Robotic Surgery? The integration of information processing with sensing and robotics to produce a super-human man-machine team Surgical CAD-CAM (image-guided robots) Surgical Assistance
6 Themes of Today s Talk Origins of Robotic Surgery Surgical CAD/CAM: Robodoc, Neuromate, Surgical Assistance: da Vinci, Aesop, Current and Future Research Merger of Surgical CAD/CAM and Surgical Assistance Better situational awareness in Surgical CAD/CAM Adding image guidance to Surgical Assistance
")
7 Surgical CAD/CAM: Overview Preoperative imaging (e.g., CT scan) Preoperative planning Intraoperative registration Computer assistance to execute plan (e.g., autonomous or semi-autonomous robot)


8 Surgical CAD/CAM: ROBODOC System Initially developed to assist with Total Hip Replacement (THR) surgery machine femur for cementless prosthesis (femoral stem)

")


9 Conventional procedure (mallet and broach) ROBODOC System Computer-assisted planning and execution
10 ROBODOC Pin-Based (Fiducial) Registration Surgery to implant pins (bone screws) prior to CT 1 3 2
11 ROBODOC Pin-Based (Fiducial) Registration Planning software detects pins in CT coordinates Y 1 X T1 Y 3 X Z 2
12 ROBODOC Pin-Based (Fiducial) Registration Robot finds pins in Robot coordinates Y 1 Y Z T2 X T1 Y X 3 X Z 2
 and then")

13 ROBODOC Pin-Based (Fiducial) Registration Software checks pin distances (safety check) and then computes transformation between CT coordinates and robot coordinates T2-1 * T1 Y 1 Y Z T2 X T1 Y X 3 X Z 2


14 ROBODOC Benefits Intended benefits: Increased dimensional accuracy Increased placement accuracy More consistent outcome Broach Robot

15 ROBODOC Status Approximately 50 systems were installed worldwide Europe (Germany, Austria, Switz., France, Spain) Asia (Japan, Korea, India) U.S. (Clinical trial for FDA approval) Over 20,000 hip and knee replacement surgeries ROBODOC no longer used in Europe (lawsuits still ongoing) Popular in Korea one hospital claims 2,500 surgeries/year Curexo Technology still attempting to grow business


16 Surgical CAD/CAM: Robotic Needle Guidance for Neurosurgery Lavallee, Troccaz, et al Kwoh, et al. 1988



17 Surgical CAD/CAM: Robotic Needle Guidance for Neurosurgery Courtesy: Integrated Surgical Systems



18 TRUS Guided Prostate Seed Placement (ultrasound for intraoperative planning) JHU RadOnc: Song, DeWeese JHU Engineering: Kazanzides Queen s : Fichtinger Industry: Burdette, Acoustic Medsystems Kronreif, ProFactor
19 Surgical CAD/CAM: Summary Works well when: Registration can be performed accurately Anatomy does not change Little or no motion, deformation Thus, more often used for: Orthopaedics Neurosurgery Needle-based interventions with minimal change between imaging and insertion
20 Surgical Assistance: Overview Provide information and/or mechanical assistance during procedure improve physician s existing sensing and/or manipulation e.g., reduced tremor, go where physician cannot go increase the number of sensors and actuators (e.g., more eyes and hands)


21 Surgical Assistance: Overview Control paradigms: Teleoperation Cooperative control




22 Surgical Assistance: da Vinci System SRI telesurgery system, circa 1992 da Vinci S system, circa 2006

23 da Vinci Status Over 1,800 systems installed worldwide Principle application prostatectomy By 2007, over 50% of prostatectomies in US were performed by a da Vinci Financial success 2007 revenue $601 M 2010 revenue $1,413 M Intuitive Surgical market cap. > $15 B

24 Surgical Assistance: Robotic Third Hand Assistants Limb positioners Retractors Endoscope holders Aesop IBM/JHU LARS etc. Can incorporate sophisticated HMI, voice, vision, etc. Credit: Yulun Wang
25 Surgical Assistance: Retinal Microsurgery 0.5 µm (Left) Regular setup of ophthalmic procedure and (Right) Needle used to insert into a retinal vein in vein cannulation procedure



26 Steady Hand Guidance for Retinal Microsurgery K v Handle force R. Taylor & R. Kumar Free hand motion Steady hand motion

27 Steady Hand Guiding at the Cellular Level Kumar, Kapoor, Taylor
28 The Future: Merger of Surgical CAD/CAM and Surgical Assistants Provides assistance to enable surgeon to execute a preoperative or intraoperative plan Why should a Surgical CAD/CAM system continue to execute a preoperative plan if the situation has changed? Why shouldn t a Surgical Assistance system consider preoperative information? Result is a human/machine collaborative system
29 New Technical Challenges Provide more complete information to the surgeon Pre-operative images (preferably registered to view) Intra-operative images (e.g. ultrasound) Local sensing: force, tissue stiffness, oxygenation Provide physical guidance Improve safety through no-fly zones Improve repeatability through guidance (virtual rulers) Improve dexterity and reduce size (mechanism design) Robots for micro-surgical applications Go where humans cannot go
 minimallyinvasive")

30 Case Studies Augmented reality for (da Vinci) minimallyinvasive surgery Retinal microsurgery system Cooperative control for skull base surgery



31 Integration of Preoperative Images Surgical Assistant Workstation (SAW) Better integration is possible!


; Real time overlay of ultrasound images")
32 Augmented Reality in Robot-Assisted Surgical Systems Clockwise from upper left: davinci surgical robot; Information overlay of force information on davinci display (Okamura et al.); Real time overlay of ultrasound images on davinci display (Taylor et al.)





33 Video to CT Registration Stereo surface tracking Stereo tool tracking Information Fusion with davinci Display Preoperative Images Vagvolgyi, Hager, Taylor, Su






 Steady hand")



34 Retinal Microsurgery System Stereo video Stereo video OCT & Spectroscopy System NIH BRP EB Surgical Workstation Visualization & display Real time image and sensor processing 3D modeling and information fusion Task representation Safety monitoring Manipulation assistance and virtual fixtures Hand-held active tremor reduction (MICRON) Steady hand microsurgical robots Modular control & sensing interfaces Preoperative images Other patient data Procedure plans Procedure logs gauge tools & sensors (proximity, force, ischemia, OCT, other) Credit: Russell Taylor
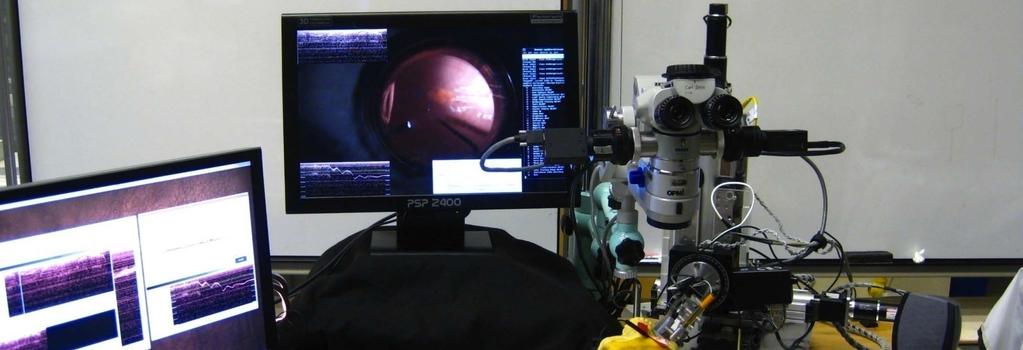






35 Retinal Microsurgery System 3D Display with Overlays Microscope EyeRobot2 Audio Output OCT Display Phantom Credit: Marcin Balicki Microphone Force FBG Interrogator


36 Manipulators for Microsurgery Steady Hand Robot (Rev 2) Iordachita, Balicki, Kazanzides, Taylor Micron Riviere (CMU)
 Surgical Tip Surface")
 Optical")

37 Sensor-Based Manipulation (OCT) Reference (0) Surgical Tip Surface Surface Signal Intensity Surgical Tip 1mm Distance (mm) Optical Coherence Tomography (OCT) Surface following using OCT visual servo Balicki, Kang, Taylor
")
 sensor and")

38 Sensor-Based Manipulation (Force) Fiber Bragg Grating (FBG) sensor and interrogator Sensory substitution (force audio) Balicki, Iordachita, Taylor

39 Tool Tracking Credit: Rogerio Richa Especially useful for hand-held instruments

40 Augmented Reality Display
41 Micro-force overlay

42 Continuous OCT (MScan) scan/review (not yet using background tracking)
43 New Technical Challenges Provide more complete information to the surgeon Pre-operative images (preferably registered to view) Intra-operative images (e.g. ultrasound) Local sensing: force, tissue stiffness, oxygenation Provide physical guidance Improve safety through no-fly zones Improve repeatability through guidance (virtual rulers) Improve dexterity and reduce size (mechanism design) Robots for micro-surgical applications Go where humans cannot go
 Drilling of the skull base is often")

44 Example: Cooperatively-controlled Robot for Skull Base Surgery Skull base has complex 3D anatomy and traversing critical structures (nerves, vessels) Drilling of the skull base is often necessary to achieve access, such as for tumor removal Manual drilling can take hours, even when only millimeters are removed Risk of damage to critical structures Limits of human dexterity Surgeon fatigue
 in CT Register CT,")

45 Proposed Solution Use robot assistance to improve safety and efficiency of skull base drilling: Define safe zone (virtual fixture) in CT Register CT, patient, and robot Robot holds cutting tool Cooperative control: responds to surgeon s forces Virtual fixtures: prevent excursion outside safe zone
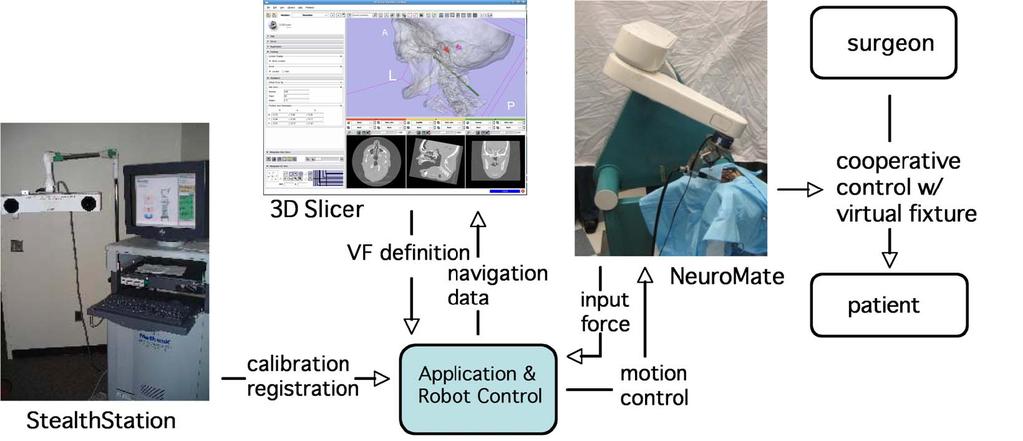
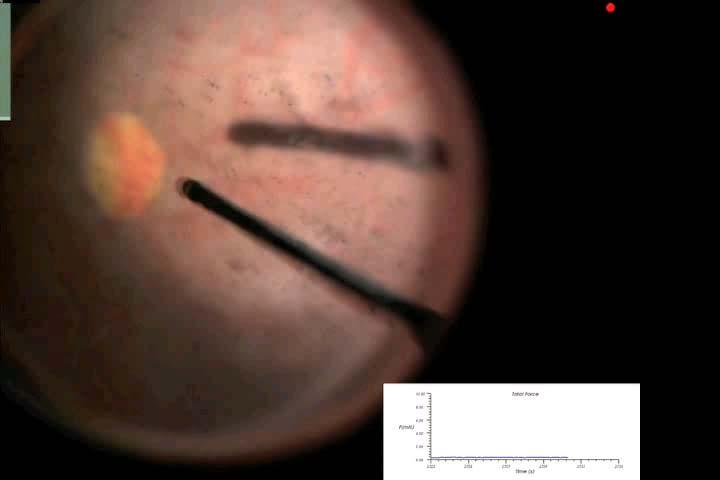
46 System Description
 Robot provided")

47 Cadaver Experiments Drill bone around internal acoustic canal (IAC) Robot provided ergonomic benefits Postoperative CT to assess accuracy Average overcut ~1 mm Maximum overcut ~3 mm
48 New Technical Challenges Provide more complete information to the surgeon Pre-operative images (preferably registered to view) Intra-operative images (e.g. ultrasound) Local sensing: force, tissue stiffness, oxygenation Provide physical guidance Improve safety through no-fly zones Improve repeatability through guidance (virtual rulers) Improve dexterity and reduce size (mechanism design) Robots for micro-surgical applications Go where humans cannot go

 laryngeoscope DDU holder DDU for saliva suction distal dexterity unit (DDU)")
49 Mechanism Design: Snake Robot for Minimally Invasive Surgery Telerobotic system for throat MIS with high distal dexterity, force feedback and high redundancy for optimal suturing. electrical supply /data lines snake drive unit spacer disk central backbone fast clamping device rotating base base link base disk moving platform end disk internal wire tool manipulation unit (TMU) laryngeoscope DDU holder DDU for saliva suction distal dexterity unit (DDU) DDU holder Snake-like unit Parallel Manipulation Unit Taylor, Simaan, Kazanzides, Flint, Kapoor, Xu




50 Mechanism Design: MR-Compatible Robot for Prostate Biopsy A manual robot with real-time MR feedback Krieger et al, IEEE TMBE, 2005 Susil et al. J Urol,, 2006 Krieger et al, MICCAI 2007
51 Summary Differing objectives means a wide variety of robot systems: Surgical CAD/CAM: increase accuracy, precision, repeatability Surgical Assistance: put the eyes and hands of surgeon in places they could not otherwise go The Future: systems that combine both paradigms Situational awareness for Surgical CAD/CAM Image-guidance for Surgical Assistants

52 Acknowledgements Faculty Russell Taylor Greg Hager Allison Okamura Gabor Fichtinger Emad Boctor Noah Cowan Cam Riviere Iulian Iordachita Jin Kang Clinicians Paul Flint Michael Choti Daniel Song Ted DeWeese Li-Ming Su David Yuh George Jallo Jim Handa Peter Gehlbach Numerous Staff and Students
Proposal for Robot Assistance for Neurosurgery
 Proposal for Robot Assistance for Neurosurgery Peter Kazanzides Assistant Research Professor of Computer Science Johns Hopkins University December 13, 2007 Funding History Active funding for development
Proposal for Robot Assistance for Neurosurgery Peter Kazanzides Assistant Research Professor of Computer Science Johns Hopkins University December 13, 2007 Funding History Active funding for development
Computer Assisted Medical Interventions
 Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Medical robotics and Image Guided Therapy (IGT) Bogdan M. Maris, PhD Temporary Assistant Professor
 Bogdan M. Maris, PhD Temporary Assistant Professor") Medical robotics and Image Guided Therapy (IGT) Bogdan M. Maris, PhD Temporary Assistant Professor E-mail bogdan.maris@univr.it Medical Robotics History, current and future applications Robots are Accurate
Medical robotics and Image Guided Therapy (IGT) Bogdan M. Maris, PhD Temporary Assistant Professor E-mail bogdan.maris@univr.it Medical Robotics History, current and future applications Robots are Accurate
Creating an Infrastructure to Address HCMDSS Challenges Introduction Enabling Technologies for Future Medical Devices
 Creating an Infrastructure to Address HCMDSS Challenges Peter Kazanzides and Russell H. Taylor Center for Computer-Integrated Surgical Systems and Technology (CISST ERC) Johns Hopkins University, Baltimore
Creating an Infrastructure to Address HCMDSS Challenges Peter Kazanzides and Russell H. Taylor Center for Computer-Integrated Surgical Systems and Technology (CISST ERC) Johns Hopkins University, Baltimore
Telemanipulation and Telestration for Microsurgery Summary
 Telemanipulation and Telestration for Microsurgery Summary Microsurgery presents an array of problems. For instance, current methodologies of Eye Surgery requires freehand manipulation of delicate structures
Telemanipulation and Telestration for Microsurgery Summary Microsurgery presents an array of problems. For instance, current methodologies of Eye Surgery requires freehand manipulation of delicate structures
Chapter 1. Introduction
 Chapter 1 Introduction Robotics technology has recently found extensive use in surgical and therapeutic procedures. The purpose of this chapter is to give an overview of the robotic tools which may be
Chapter 1 Introduction Robotics technology has recently found extensive use in surgical and therapeutic procedures. The purpose of this chapter is to give an overview of the robotic tools which may be
HUMAN Robot Cooperation Techniques in Surgery
 HUMAN Robot Cooperation Techniques in Surgery Alícia Casals Institute for Bioengineering of Catalonia (IBEC), Universitat Politècnica de Catalunya (UPC), Barcelona, Spain alicia.casals@upc.edu Keywords:
HUMAN Robot Cooperation Techniques in Surgery Alícia Casals Institute for Bioengineering of Catalonia (IBEC), Universitat Politècnica de Catalunya (UPC), Barcelona, Spain alicia.casals@upc.edu Keywords:
Robots for Medicine and Personal Assistance. Guest lecturer: Ron Alterovitz
 Robots for Medicine and Personal Assistance Guest lecturer: Ron Alterovitz Growth of Robotics Industry Worldwide $70 $56 Market Size (Billions) $42 $28 $14 $0 1995 2000 2005 2010 2015 2020 2025 Source:
Robots for Medicine and Personal Assistance Guest lecturer: Ron Alterovitz Growth of Robotics Industry Worldwide $70 $56 Market Size (Billions) $42 $28 $14 $0 1995 2000 2005 2010 2015 2020 2025 Source:
Robots in the Field of Medicine
 Robots in the Field of Medicine Austin Gillis and Peter Demirdjian Malden Catholic High School 1 Pioneers Robots in the Field of Medicine The use of robots in medicine is where it is today because of four
Robots in the Field of Medicine Austin Gillis and Peter Demirdjian Malden Catholic High School 1 Pioneers Robots in the Field of Medicine The use of robots in medicine is where it is today because of four
Cooperative Robot Assistant for Retinal Microsurgery
 Cooperative Robot Assistant for Retinal Microsurgery Ioana Fleming 1,1, Marcin Balicki 1, John Koo 2, Iulian Iordachita 1, Ben Mitchell 1, James Handa 2, Gregory Hager 1 and Russell Taylor 1 1 ERC for
Cooperative Robot Assistant for Retinal Microsurgery Ioana Fleming 1,1, Marcin Balicki 1, John Koo 2, Iulian Iordachita 1, Ben Mitchell 1, James Handa 2, Gregory Hager 1 and Russell Taylor 1 1 ERC for
Medical Robotics. Part II: SURGICAL ROBOTICS
 5 Medical Robotics Part II: SURGICAL ROBOTICS In the last decade, surgery and robotics have reached a maturity that has allowed them to be safely assimilated to create a new kind of operating room. This
5 Medical Robotics Part II: SURGICAL ROBOTICS In the last decade, surgery and robotics have reached a maturity that has allowed them to be safely assimilated to create a new kind of operating room. This
Methods for Haptic Feedback in Teleoperated Robotic Surgery
 Young Group 5 1 Methods for Haptic Feedback in Teleoperated Robotic Surgery Paper Review Jessie Young Group 5: Haptic Interface for Surgical Manipulator System March 12, 2012 Paper Selection: A. M. Okamura.
Young Group 5 1 Methods for Haptic Feedback in Teleoperated Robotic Surgery Paper Review Jessie Young Group 5: Haptic Interface for Surgical Manipulator System March 12, 2012 Paper Selection: A. M. Okamura.
Group 5 Project Proposal Prototype of a Micro-Surgical Tool Tracker
 Group 5 Project Proposal Prototype of a Micro-Surgical Tool Tracker Students: Sue Kulason, Yejin Kim Mentors: Marcin Balicki, Balazs Vagvolgyi, Russell Taylor February 18, 2013 1 Project Summary Computer
Group 5 Project Proposal Prototype of a Micro-Surgical Tool Tracker Students: Sue Kulason, Yejin Kim Mentors: Marcin Balicki, Balazs Vagvolgyi, Russell Taylor February 18, 2013 1 Project Summary Computer
Medical Robotics in Computer-Integrated Surgery
 IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION, VOL. 19, NO. 5, OCTOBER 2003 765 Medical Robotics in Computer-Integrated Surgery Russell H. Taylor, Fellow, IEEE, and Dan Stoianovici Abstract This paper provides
IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION, VOL. 19, NO. 5, OCTOBER 2003 765 Medical Robotics in Computer-Integrated Surgery Russell H. Taylor, Fellow, IEEE, and Dan Stoianovici Abstract This paper provides
Scopis Hybrid Navigation with Augmented Reality
 Scopis Hybrid Navigation with Augmented Reality Intelligent navigation systems for head surgery www.scopis.com Scopis Hybrid Navigation One System. Optical and electromagnetic measurement technology. As
Scopis Hybrid Navigation with Augmented Reality Intelligent navigation systems for head surgery www.scopis.com Scopis Hybrid Navigation One System. Optical and electromagnetic measurement technology. As
ERC: Engineering Research Center for Computer- Integrated Surgical Systems and Technology (NSF Grant # )
") ERC: Engineering Research Center for Computer- Integrated Surgical Systems and Technology (NSF Grant #9731748) MARCIN BALICKI 1, and TIAN XIA 2 1,2 Johns Hopkins University, 3400 Charles St., Baltimore,
ERC: Engineering Research Center for Computer- Integrated Surgical Systems and Technology (NSF Grant #9731748) MARCIN BALICKI 1, and TIAN XIA 2 1,2 Johns Hopkins University, 3400 Charles St., Baltimore,
Feasibility of photoacoustic image guidance for telerobotic endonasal transsphenoidal surgery
 Feasibility of photoacoustic image guidance for telerobotic endonasal transsphenoidal surgery Sungmin Kim, Youri Tan, Peter Kazanzides, and Muyinatu A. Lediju Bell Abstract Injury to the internal carotid
Feasibility of photoacoustic image guidance for telerobotic endonasal transsphenoidal surgery Sungmin Kim, Youri Tan, Peter Kazanzides, and Muyinatu A. Lediju Bell Abstract Injury to the internal carotid
Two decades after the first reported robotic surgical
 EYEWIRE Surgical and Interventional Robotics Core Concepts, Technology, and Design BY PETER KAZANZIDES, GABOR FICHTINGER, GREGORY D. HAGER, ALLISON M. OKAMURA, LOUIS L. WHITCOMB, AND RUSSELL H. TAYLOR
EYEWIRE Surgical and Interventional Robotics Core Concepts, Technology, and Design BY PETER KAZANZIDES, GABOR FICHTINGER, GREGORY D. HAGER, ALLISON M. OKAMURA, LOUIS L. WHITCOMB, AND RUSSELL H. TAYLOR
Robone: Next Generation Orthopedic Surgical Device Final Report
 Robone: Next Generation Orthopedic Surgical Device Final Report Team Members Andrew Hundt Alex Strickland Shahriar Sefati Mentors Prof. Peter Kazanzides (Prof. Taylor) Background: Total hip replacement
Robone: Next Generation Orthopedic Surgical Device Final Report Team Members Andrew Hundt Alex Strickland Shahriar Sefati Mentors Prof. Peter Kazanzides (Prof. Taylor) Background: Total hip replacement
Surgical Assist Devices & Systems aka Surgical Robots
 Surgical Assist Devices & Systems aka Surgical Robots D. J. McMahon 150125 rev cewood 2018-01-19 Key Points Surgical Assist Devices & Systems: Understand why the popular name robot isn t accurate for Surgical
Surgical Assist Devices & Systems aka Surgical Robots D. J. McMahon 150125 rev cewood 2018-01-19 Key Points Surgical Assist Devices & Systems: Understand why the popular name robot isn t accurate for Surgical
Medical Robots. Healing and Helping. Monika and Wen
 Medical Robots Healing and Helping Monika and Wen Index Definition My definition For what? History Other facts C' Arm Telediagnosis MRI Robitom Nursery Robotic Surgery Telesurgery Advantages & Disadvantages
Medical Robots Healing and Helping Monika and Wen Index Definition My definition For what? History Other facts C' Arm Telediagnosis MRI Robitom Nursery Robotic Surgery Telesurgery Advantages & Disadvantages
Maneesh Dewan. Prepared on: April 11, 2007
 Maneesh Dewan maneesh@cs.jhu.edu www.cs.jhu.edu/~maneesh 307, E. University Parkway, 3400 N. Charles Street, Baltimore, MD 21218. NEB B28, Baltimore, MD 21218. Phone: (410) 900 8804 (C) Phone: (410) 516
Maneesh Dewan maneesh@cs.jhu.edu www.cs.jhu.edu/~maneesh 307, E. University Parkway, 3400 N. Charles Street, Baltimore, MD 21218. NEB B28, Baltimore, MD 21218. Phone: (410) 900 8804 (C) Phone: (410) 516
Robotics, telepresence and minimal access surgery - A short and selective history
 Robotics, telepresence and minimal access surgery - A short and selective history Luke Hares, Technology Director, Cambridge Medical Robotics P-306v2.0 Overview o Disclaimer! o Highlights of robotics and
Robotics, telepresence and minimal access surgery - A short and selective history Luke Hares, Technology Director, Cambridge Medical Robotics P-306v2.0 Overview o Disclaimer! o Highlights of robotics and
Haptic Feedback in Laparoscopic and Robotic Surgery
 Haptic Feedback in Laparoscopic and Robotic Surgery Dr. Warren Grundfest Professor Bioengineering, Electrical Engineering & Surgery UCLA, Los Angeles, California Acknowledgment This Presentation & Research
Haptic Feedback in Laparoscopic and Robotic Surgery Dr. Warren Grundfest Professor Bioengineering, Electrical Engineering & Surgery UCLA, Los Angeles, California Acknowledgment This Presentation & Research
Haptic Virtual Fixtures for Robot-Assisted Manipulation
 Haptic Virtual Fixtures for Robot-Assisted Manipulation Jake J. Abbott, Panadda Marayong, and Allison M. Okamura Department of Mechanical Engineering, The Johns Hopkins University {jake.abbott, pmarayong,
Haptic Virtual Fixtures for Robot-Assisted Manipulation Jake J. Abbott, Panadda Marayong, and Allison M. Okamura Department of Mechanical Engineering, The Johns Hopkins University {jake.abbott, pmarayong,
SMart wearable Robotic Teleoperated surgery
 SMart wearable Robotic Teleoperated surgery This project has received funding from the European Union s Horizon 2020 research and innovation programme under grant agreement No 732515 Context Minimally
SMart wearable Robotic Teleoperated surgery This project has received funding from the European Union s Horizon 2020 research and innovation programme under grant agreement No 732515 Context Minimally
OsteoBridge IKA Intramedullary Knee Arthrodesis Fixation System. From the «BioBall Company» OsteoBridge Family
 From the «BioBall Company» OsteoBridge Family OsteoBridge IKA Intramedullary Knee Arthrodesis Fixation System The modular system for the fixation of the knee joint 01. OsteoBridge IKA The OsteoBridge IKA
From the «BioBall Company» OsteoBridge Family OsteoBridge IKA Intramedullary Knee Arthrodesis Fixation System The modular system for the fixation of the knee joint 01. OsteoBridge IKA The OsteoBridge IKA
Surgical Robot Competition Introducing Engineering in Medicine to Pre-college Students
 Session 2793 Surgical Robot Competition Introducing Engineering in Medicine to Pre-college Students Oleg Gerovichev, Randal P. Goldberg, Ian D. Donn, Anand Viswanathan, Russell H. Taylor Department of
Session 2793 Surgical Robot Competition Introducing Engineering in Medicine to Pre-college Students Oleg Gerovichev, Randal P. Goldberg, Ian D. Donn, Anand Viswanathan, Russell H. Taylor Department of
da Vinci Skills Simulator
 da Vinci Skills Simulator Introducing Simulation for the da Vinci Surgical System Skills Practice in an Immersive Virtual Environment Portable. Practical. Powerful. The da Vinci Skills Simulator contains
da Vinci Skills Simulator Introducing Simulation for the da Vinci Surgical System Skills Practice in an Immersive Virtual Environment Portable. Practical. Powerful. The da Vinci Skills Simulator contains
High Dexterity Snake-Like Robotic Slaves for Minimally Invasive Telesurgery of the Upper Airway
 High Dexterity Snake-Like Robotic Slaves for Minimally Invasive Telesurgery of the Upper Airway Nabil Simaan 1, Russell Taylor 1, and Paul Flint 2 1 Department of Computer Science NSF Engineering Research
High Dexterity Snake-Like Robotic Slaves for Minimally Invasive Telesurgery of the Upper Airway Nabil Simaan 1, Russell Taylor 1, and Paul Flint 2 1 Department of Computer Science NSF Engineering Research
Autonomous Surgical Robotics
 Nicolás Pérez de Olaguer Santamaría Autonomous Surgical Robotics 1 / 29 MIN Faculty Department of Informatics Autonomous Surgical Robotics Nicolás Pérez de Olaguer Santamaría University of Hamburg Faculty
Nicolás Pérez de Olaguer Santamaría Autonomous Surgical Robotics 1 / 29 MIN Faculty Department of Informatics Autonomous Surgical Robotics Nicolás Pérez de Olaguer Santamaría University of Hamburg Faculty
Novel machine interface for scaled telesurgery
 Novel machine interface for scaled telesurgery S. Clanton, D. Wang, Y. Matsuoka, D. Shelton, G. Stetten SPIE Medical Imaging, vol. 5367, pp. 697-704. San Diego, Feb. 2004. A Novel Machine Interface for
Novel machine interface for scaled telesurgery S. Clanton, D. Wang, Y. Matsuoka, D. Shelton, G. Stetten SPIE Medical Imaging, vol. 5367, pp. 697-704. San Diego, Feb. 2004. A Novel Machine Interface for
RENDERING MEDICAL INTERVENTIONS VIRTUAL AND ROBOT
 RENDERING MEDICAL INTERVENTIONS VIRTUAL AND ROBOT Lavinia Ioana Săbăilă Doina Mortoiu Theoharis Babanatsas Aurel Vlaicu Arad University, e-mail: lavyy_99@yahoo.com Aurel Vlaicu Arad University, e mail:
RENDERING MEDICAL INTERVENTIONS VIRTUAL AND ROBOT Lavinia Ioana Săbăilă Doina Mortoiu Theoharis Babanatsas Aurel Vlaicu Arad University, e-mail: lavyy_99@yahoo.com Aurel Vlaicu Arad University, e mail:
TREND OF SURGICAL ROBOT TECHNOLOGY AND ITS INDUSTRIAL OUTLOOK
 TREND OF SURGICAL ROBOT TECHNOLOGY AND ITS INDUSTRIAL OUTLOOK BYUNG-JU YI Electronic Systems Engineering Department, Hanyang University, Korea E-mail: bj@hanyang.ac.kr Abstract - Since the launch of the
TREND OF SURGICAL ROBOT TECHNOLOGY AND ITS INDUSTRIAL OUTLOOK BYUNG-JU YI Electronic Systems Engineering Department, Hanyang University, Korea E-mail: bj@hanyang.ac.kr Abstract - Since the launch of the
Mechatronic Assistance for Surgical Applications
 Acta Polytechnica Hungarica Vol. 13, No. 1, 2016 Mechatronic Assistance for Surgical Applications Gernot Kronreif Austrian Center for Medical Innovation and Technology ACMIT Gmbh Viktor Kaplan-Strasse
Acta Polytechnica Hungarica Vol. 13, No. 1, 2016 Mechatronic Assistance for Surgical Applications Gernot Kronreif Austrian Center for Medical Innovation and Technology ACMIT Gmbh Viktor Kaplan-Strasse
Stereoscopic Augmented Reality System for Computer Assisted Surgery
 Marc Liévin and Erwin Keeve Research center c a e s a r, Center of Advanced European Studies and Research, Surgical Simulation and Navigation Group, Friedensplatz 16, 53111 Bonn, Germany. A first architecture
Marc Liévin and Erwin Keeve Research center c a e s a r, Center of Advanced European Studies and Research, Surgical Simulation and Navigation Group, Friedensplatz 16, 53111 Bonn, Germany. A first architecture
Can technological solutions support user experience, learning, and operation outcome in robotic surgery?
 VTT TECHNICAL RESEARCH CENTRE OF FINLAND LTD Can technological solutions support user experience, learning, and operation outcome in robotic surgery? ERF2016 Session Image Guided Robotic Surgery and Interventions
VTT TECHNICAL RESEARCH CENTRE OF FINLAND LTD Can technological solutions support user experience, learning, and operation outcome in robotic surgery? ERF2016 Session Image Guided Robotic Surgery and Interventions
From the «BioBall Company» OsteoBridge Family. OsteoBridge Knee Arthrodesis. The modular system for the fusion of the knee joint
 From the «BioBall Company» OsteoBridge Family OsteoBridge Knee Arthrodesis The modular system for the fusion of the knee joint OsteoBridge Knee Arthrodesis System 01. OsteoBridge Knee Arthrodesis The OsteoBridge
From the «BioBall Company» OsteoBridge Family OsteoBridge Knee Arthrodesis The modular system for the fusion of the knee joint OsteoBridge Knee Arthrodesis System 01. OsteoBridge Knee Arthrodesis The OsteoBridge
DEVELOPING SENSORS FOR SURGERY SUPPORT ROBOTS Mona Kudo
 DEVELOPING SENSORS FOR SURGERY SUPPORT ROBOTS 20328 Mona Kudo 1. INTRODUCTION Today, many kinds of surgery support robots are used in medical procedures all over economically advanced countries such as
DEVELOPING SENSORS FOR SURGERY SUPPORT ROBOTS 20328 Mona Kudo 1. INTRODUCTION Today, many kinds of surgery support robots are used in medical procedures all over economically advanced countries such as
NeuroSim - The Prototype of a Neurosurgical Training Simulator
 NeuroSim - The Prototype of a Neurosurgical Training Simulator Florian BEIER a,1,stephandiederich a,kirstenschmieder b and Reinhard MÄNNER a,c a Institute for Computational Medicine, University of Heidelberg
NeuroSim - The Prototype of a Neurosurgical Training Simulator Florian BEIER a,1,stephandiederich a,kirstenschmieder b and Reinhard MÄNNER a,c a Institute for Computational Medicine, University of Heidelberg
Workshop / Tutorial on Continuum Robots for Surgery: Modeling, Control and Applications. Abstract. Presenter Biographical Sketch DRAFT
 DRAFT Dynamic Systems and Control Conference DSCC 2017 Oct 11-13, 2017, Tysons Corner, Virginia, USA DSCC Propsoal-19 Workshop / Tutorial on Continuum Robots for Surgery: Modeling, Control and Applications
DRAFT Dynamic Systems and Control Conference DSCC 2017 Oct 11-13, 2017, Tysons Corner, Virginia, USA DSCC Propsoal-19 Workshop / Tutorial on Continuum Robots for Surgery: Modeling, Control and Applications
Optical Measurement of Needle Insertion Depth
 Optical Measurement of Needle Insertion Depth Karsten Seidl, Gabor Fichtinger, Peter Kazanzides Department of Computer Science Johns Hopkins University Baltimore, MD 21218 Email: {kseidl, gabor, pkaz}@cs.jhu.edu
Optical Measurement of Needle Insertion Depth Karsten Seidl, Gabor Fichtinger, Peter Kazanzides Department of Computer Science Johns Hopkins University Baltimore, MD 21218 Email: {kseidl, gabor, pkaz}@cs.jhu.edu
FALL 2014, Issue No. 32 ROBOTICS AT OUR FINGERTIPS
 FALL 2014, Issue No. 32 ROBOTICS AT OUR FINGERTIPS FALL 2014 Issue No. 32 12 CYBERSECURITY SOLUTION NSF taps UCLA Engineering to take lead in encryption research. Cover Photo: Joanne Leung 6MAN AND MACHINE
FALL 2014, Issue No. 32 ROBOTICS AT OUR FINGERTIPS FALL 2014 Issue No. 32 12 CYBERSECURITY SOLUTION NSF taps UCLA Engineering to take lead in encryption research. Cover Photo: Joanne Leung 6MAN AND MACHINE
Virtual and Augmented Reality Applications
 Department of Engineering for Innovation University of Salento Lecce, Italy Augmented and Virtual Reality Laboratory (AVR Lab) Keynote Speech: Augmented and Virtual Reality Laboratory (AVR Lab) Keynote
Department of Engineering for Innovation University of Salento Lecce, Italy Augmented and Virtual Reality Laboratory (AVR Lab) Keynote Speech: Augmented and Virtual Reality Laboratory (AVR Lab) Keynote
Distributed Modular Computer-Integrated Surgical Robotic Systems:
 Distributed Modular Computer-Integrated Surgical Robotic Systems: Implementation using Modular Software and Networked Systems Andrew Bzostek 1,4, Rajesh Kumar 1,4, Nobuhiko Hata 2,4, Oliver Schorr 2,3,4,
Distributed Modular Computer-Integrated Surgical Robotic Systems: Implementation using Modular Software and Networked Systems Andrew Bzostek 1,4, Rajesh Kumar 1,4, Nobuhiko Hata 2,4, Oliver Schorr 2,3,4,
Haptic Feedback in Robot Assisted Minimal Invasive Surgery
 K. Bhatia Haptic Feedback in Robot Assisted Minimal Invasive Surgery 1 / 33 MIN Faculty Department of Informatics Haptic Feedback in Robot Assisted Minimal Invasive Surgery Kavish Bhatia University of
K. Bhatia Haptic Feedback in Robot Assisted Minimal Invasive Surgery 1 / 33 MIN Faculty Department of Informatics Haptic Feedback in Robot Assisted Minimal Invasive Surgery Kavish Bhatia University of
Harvard BioRobotics Laboratory Technical Report
 Harvard BioRobotics Laboratory Technical Report December 2 Virtual Fixtures for Robotic Endoscopic Surgery Fuji Lai & Robert D. Howe Division of Engineering and Applied Sciences Harvard University 323
Harvard BioRobotics Laboratory Technical Report December 2 Virtual Fixtures for Robotic Endoscopic Surgery Fuji Lai & Robert D. Howe Division of Engineering and Applied Sciences Harvard University 323
AC : MEDICAL ROBOTICS LABORATORY FOR BIOMEDICAL ENGINEERS
 AC 2008-1272: MEDICAL ROBOTICS LABORATORY FOR BIOMEDICAL ENGINEERS Shahin Sirouspour, McMaster University http://www.ece.mcmaster.ca/~sirouspour/ Mahyar Fotoohi, Quanser Inc Pawel Malysz, McMaster University
AC 2008-1272: MEDICAL ROBOTICS LABORATORY FOR BIOMEDICAL ENGINEERS Shahin Sirouspour, McMaster University http://www.ece.mcmaster.ca/~sirouspour/ Mahyar Fotoohi, Quanser Inc Pawel Malysz, McMaster University
Digital Reality TM changes everything
 F E B R U A R Y 2 0 1 8 Digital Reality TM changes everything Step into the future What are we talking about? Virtual Reality VR is an entirely digital world that completely immerses the user in an environment
F E B R U A R Y 2 0 1 8 Digital Reality TM changes everything Step into the future What are we talking about? Virtual Reality VR is an entirely digital world that completely immerses the user in an environment
T in an evolving partnership between humans (surgeons)
") IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION. VOL. 10, NO. 3, JUNE 1994 26 1 An Image-Directed Robotic System for Precise Orthopaedic Surgery Russell H. Taylor, Fellow, IEEE, Brent D. Mittelstadt, Howard
IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION. VOL. 10, NO. 3, JUNE 1994 26 1 An Image-Directed Robotic System for Precise Orthopaedic Surgery Russell H. Taylor, Fellow, IEEE, Brent D. Mittelstadt, Howard
Application of Force Feedback in Robot Assisted Minimally Invasive Surgery
 Application of Force Feedback in Robot Assisted Minimally Invasive Surgery István Nagy, Hermann Mayer, and Alois Knoll Technische Universität München, 85748 Garching, Germany, {nagy mayerh knoll}@in.tum.de,
Application of Force Feedback in Robot Assisted Minimally Invasive Surgery István Nagy, Hermann Mayer, and Alois Knoll Technische Universität München, 85748 Garching, Germany, {nagy mayerh knoll}@in.tum.de,
Virtual and Augmented Reality techniques embedded and based on a Operative Microscope. Training for Neurosurgery.
 Virtual and Augmented Reality techniques embedded and based on a Operative Microscope. Training for Neurosurgery. 1 M. Aschke 1, M.Ciucci 1,J.Raczkowsky 1, R.Wirtz 2, H. Wörn 1 1 IPR, Institute for Process
Virtual and Augmented Reality techniques embedded and based on a Operative Microscope. Training for Neurosurgery. 1 M. Aschke 1, M.Ciucci 1,J.Raczkowsky 1, R.Wirtz 2, H. Wörn 1 1 IPR, Institute for Process
Performance Analysis of Steady-Hand Teleoperation versus Cooperative Manipulation
 Performance Analysis of Steady-Hand Teleoperation versus Cooperative Manipulation Izukanne Emeagwali, Panadda Marayong, Jake J. Abbott, and Allison M. Okamura Engineering Research Center for Computer-Integrated
Performance Analysis of Steady-Hand Teleoperation versus Cooperative Manipulation Izukanne Emeagwali, Panadda Marayong, Jake J. Abbott, and Allison M. Okamura Engineering Research Center for Computer-Integrated
Job Description. Commitment: Must be available to work full-time hours, M-F for weeks beginning Summer of 2018.
 Research Intern Director of Research We are seeking a summer intern to support the team to develop prototype 3D sensing systems based on state-of-the-art sensing technologies along with computer vision
Research Intern Director of Research We are seeking a summer intern to support the team to develop prototype 3D sensing systems based on state-of-the-art sensing technologies along with computer vision
Surgical robot simulation with BBZ console
 Review Article on Thoracic Surgery Surgical robot simulation with BBZ console Francesco Bovo 1, Giacomo De Rossi 2, Francesco Visentin 2,3 1 BBZ srl, Verona, Italy; 2 Department of Computer Science, Università
Review Article on Thoracic Surgery Surgical robot simulation with BBZ console Francesco Bovo 1, Giacomo De Rossi 2, Francesco Visentin 2,3 1 BBZ srl, Verona, Italy; 2 Department of Computer Science, Università
Inexpensive Monocular Pico-Projector-based Augmented Reality Display for Surgical Microscope
 Inexpensive Monocular Pico-Projector-based Augmented Reality Display for Surgical Microscope Chen Shi Dept. of Electrical Engineering University of Washington Seattle, Washington, USA chenscn@u.washington.edu
Inexpensive Monocular Pico-Projector-based Augmented Reality Display for Surgical Microscope Chen Shi Dept. of Electrical Engineering University of Washington Seattle, Washington, USA chenscn@u.washington.edu
High-Field MRI-Compatible Needle Placement Robot for Prostate Interventions
 Medicine Meets Virtual Reality 18 J.D. Westwood et al. (Eds.) IOS Press, 2011 2011 The authors. All rights reserved. doi:10.3233/978-1-60750-706-2-623 623 High-Field MRI-Compatible Needle Placement Robot
Medicine Meets Virtual Reality 18 J.D. Westwood et al. (Eds.) IOS Press, 2011 2011 The authors. All rights reserved. doi:10.3233/978-1-60750-706-2-623 623 High-Field MRI-Compatible Needle Placement Robot
HIP Solutions by Tornier MEIJE DUO 12/14 TAPER SURGICAL TECHNIQUE. surgical technique
 HIP Solutions by Tornier MEIJE DUO 12/14 TAPER SURGICAL TECHNIQUE surgical technique MEIJE DUO 12/14 TAPER SURGICAL TECHNIQUE Meije duotm H I P P R O S T H E S I S 1. Locating the pelvic horizontal line
HIP Solutions by Tornier MEIJE DUO 12/14 TAPER SURGICAL TECHNIQUE surgical technique MEIJE DUO 12/14 TAPER SURGICAL TECHNIQUE Meije duotm H I P P R O S T H E S I S 1. Locating the pelvic horizontal line
An Inexpensive Experimental Setup for Teaching The Concepts of Da Vinci Surgical Robot
 An Inexpensive Experimental Setup for Teaching The Concepts of Da Vinci Surgical Robot S.Vignesh kishan kumar 1, G. Anitha 2 1 M.TECH Biomedical Engineering, SRM University, Chennai 2 Assistant Professor,
An Inexpensive Experimental Setup for Teaching The Concepts of Da Vinci Surgical Robot S.Vignesh kishan kumar 1, G. Anitha 2 1 M.TECH Biomedical Engineering, SRM University, Chennai 2 Assistant Professor,
THE SMITH AND NEPHEW ANNUAL LECTURE. ROBOTIC SURGERY: FROM AUTONOMOUS SYSTEMS TO INTELLIGENT TOOLS. PROFESSOR BRIAN DAVIES. IMPERIAL COLLEGE LONDON.
 THE SMITH AND NEPHEW ANNUAL LECTURE. ROBOTIC SURGERY: FROM AUTONOMOUS SYSTEMS TO INTELLIGENT TOOLS. PROFESSOR BRIAN DAVIES. IMPERIAL COLLEGE LONDON. INTRODUCTION In recent years Medical Robotics has seen
THE SMITH AND NEPHEW ANNUAL LECTURE. ROBOTIC SURGERY: FROM AUTONOMOUS SYSTEMS TO INTELLIGENT TOOLS. PROFESSOR BRIAN DAVIES. IMPERIAL COLLEGE LONDON. INTRODUCTION In recent years Medical Robotics has seen
BodyViz fact sheet. BodyViz 2321 North Loop Drive, Suite 110 Ames, IA x555 www. bodyviz.com
 BodyViz fact sheet BodyViz, the company, was established in 2007 at the Iowa State University Research Park in Ames, Iowa. It was created by ISU s Virtual Reality Applications Center Director James Oliver,
BodyViz fact sheet BodyViz, the company, was established in 2007 at the Iowa State University Research Park in Ames, Iowa. It was created by ISU s Virtual Reality Applications Center Director James Oliver,
SpeedTip CCS 5.0, 7.0
 SURGICAL TECHNIQUE STEP BY STEP SpeedTip CCS 5.0, 7.0 Cannulated Compression Screws APTUS 2 SpeedTip CCS 5.0, 7.0 Cannulated Compression Screws Contents 3 Introduction Product Materials Indications Contraindications
SURGICAL TECHNIQUE STEP BY STEP SpeedTip CCS 5.0, 7.0 Cannulated Compression Screws APTUS 2 SpeedTip CCS 5.0, 7.0 Cannulated Compression Screws Contents 3 Introduction Product Materials Indications Contraindications
Robot assisted craniofacial surgery: first clinical evaluation
 Robot assisted craniofacial surgery: first clinical evaluation C. Burghart*, R. Krempien, T. Redlich+, A. Pernozzoli+, H. Grabowski*, J. Muenchenberg*, J. Albers#, S. Haßfeld+, C. Vahl#, U. Rembold*, H.
Robot assisted craniofacial surgery: first clinical evaluation C. Burghart*, R. Krempien, T. Redlich+, A. Pernozzoli+, H. Grabowski*, J. Muenchenberg*, J. Albers#, S. Haßfeld+, C. Vahl#, U. Rembold*, H.
NIH Public Access Author Manuscript Otol Neurotol. Author manuscript; available in PMC 2012 January 1.
 NIH Public Access Author Manuscript Published in final edited form as: Otol Neurotol. 2011 January ; 32(1): 11 16. doi:10.1097/mao.0b013e3181fcee9e. Robotic Mastoidectomy Andrei Danilchenko, B.S., Graduate
NIH Public Access Author Manuscript Published in final edited form as: Otol Neurotol. 2011 January ; 32(1): 11 16. doi:10.1097/mao.0b013e3181fcee9e. Robotic Mastoidectomy Andrei Danilchenko, B.S., Graduate
Magnified Real-Time Tomographic Reflection
 Magnified Real-Time Tomographic Reflection George Stetten and Vikram Chib Department of Bioengineering, University of Pittsburgh, Robotics Institute, Carnegie Mellon University. www.stetten.com Abstract.
Magnified Real-Time Tomographic Reflection George Stetten and Vikram Chib Department of Bioengineering, University of Pittsburgh, Robotics Institute, Carnegie Mellon University. www.stetten.com Abstract.
Current Status and Future of Medical Virtual Reality
 2011.08.16 Medical VR Current Status and Future of Medical Virtual Reality Naoto KUME, Ph.D. Assistant Professor of Kyoto University Hospital 1. History of Medical Virtual Reality Virtual reality (VR)
2011.08.16 Medical VR Current Status and Future of Medical Virtual Reality Naoto KUME, Ph.D. Assistant Professor of Kyoto University Hospital 1. History of Medical Virtual Reality Virtual reality (VR)
Open surgery SIMULATION
 Open surgery SIMULATION ossimtech.com A note from the President and Co-Founder, Mr. André Blain Medical education and surgical training are going through exciting changes these days. Fast-paced innovation
Open surgery SIMULATION ossimtech.com A note from the President and Co-Founder, Mr. André Blain Medical education and surgical training are going through exciting changes these days. Fast-paced innovation
5th Metatarsal Fracture System Surgical Technique
 5th Metatarsal Fracture System Surgical Technique 5th Metatarsal Fracture System 5th Metatarsal Fracture System The 5th Metatarsal Fracture System (AR-8956S) is a uniquely designed screw and plate system
5th Metatarsal Fracture System Surgical Technique 5th Metatarsal Fracture System 5th Metatarsal Fracture System The 5th Metatarsal Fracture System (AR-8956S) is a uniquely designed screw and plate system
THREE-DIMENSIONAL ACCURACY ASSESSMENT OF EYE SURGEONS
 1 of 4 THREE-DIMENSIONAL ACCURAC ASSESSMENT OF EE SURGEONS Lee F. Hotraphinyo 1, Cameron N. Riviere 2 1 Department of Electrical and Computer Engineering and 2 The Robotics Institute Carnegie Mellon University,
1 of 4 THREE-DIMENSIONAL ACCURAC ASSESSMENT OF EE SURGEONS Lee F. Hotraphinyo 1, Cameron N. Riviere 2 1 Department of Electrical and Computer Engineering and 2 The Robotics Institute Carnegie Mellon University,
VIRTUAL REALITY Introduction. Emil M. Petriu SITE, University of Ottawa
 VIRTUAL REALITY Introduction Emil M. Petriu SITE, University of Ottawa Natural and Virtual Reality Virtual Reality Interactive Virtual Reality Virtualized Reality Augmented Reality HUMAN PERCEPTION OF
VIRTUAL REALITY Introduction Emil M. Petriu SITE, University of Ottawa Natural and Virtual Reality Virtual Reality Interactive Virtual Reality Virtualized Reality Augmented Reality HUMAN PERCEPTION OF
OPHTHALMIC SURGICAL MODELS
 OPHTHALMIC SURGICAL MODELS BIONIKO designs innovative surgical models, task trainers and teaching tools for the ophthalmic industry. Our surgical models present the user with dexterity and coordination
OPHTHALMIC SURGICAL MODELS BIONIKO designs innovative surgical models, task trainers and teaching tools for the ophthalmic industry. Our surgical models present the user with dexterity and coordination
Head Holding System. with. Mizuho America, Inc.
 Head Holding System Hongo Shintoku Building F, 3-38- Hongo, Bunkyo-ku, Tokyo 3-33, JAPAN Phone: +8-3-385- F a x: +8-3-388-5 U R L: www.mizuhomedical.co.jp E-mail: sales-dept@mizuhomedical.co.jp Caution
Head Holding System Hongo Shintoku Building F, 3-38- Hongo, Bunkyo-ku, Tokyo 3-33, JAPAN Phone: +8-3-385- F a x: +8-3-388-5 U R L: www.mizuhomedical.co.jp E-mail: sales-dept@mizuhomedical.co.jp Caution
Fracture fixation providing absolute or relative stability, as required by the personality of the fracture, the patient, and the injury.
 Course program AOCMF Advanced Innovations Symposium & Workshop on Technological Advances in Head and Neck and Craniofacial Surgery December 8-11, 2011, Bangalore, India Our mission is to continuously set
Course program AOCMF Advanced Innovations Symposium & Workshop on Technological Advances in Head and Neck and Craniofacial Surgery December 8-11, 2011, Bangalore, India Our mission is to continuously set
Haptics in Medical Simulation
 Haptics in Medical Simulation Allison M. Okamura Associate Professor Department of Mechanical Engineering Design and Biomechanics Groups Stanford University Collaborative Haptics and Robotics in Medicine
Haptics in Medical Simulation Allison M. Okamura Associate Professor Department of Mechanical Engineering Design and Biomechanics Groups Stanford University Collaborative Haptics and Robotics in Medicine
Head Holding System. with
 Head Holding System with Attaching the pin Simply push the pin in! Ratchet Slider The mechanism allows for simply pushing threaded pin into Ratchet Slider for securely fixing the skull of the patient without
Head Holding System with Attaching the pin Simply push the pin in! Ratchet Slider The mechanism allows for simply pushing threaded pin into Ratchet Slider for securely fixing the skull of the patient without
Zimmer Natural Nail System
 Zimmer Natural Nail System Cephalomedullary Nail Surgical Technique Compact Case- Short Nails Only SMALL Zimmer Natural Nail System Cephalomedullary Nail Technique - Small 1 Zimmer Natural Nail System
Zimmer Natural Nail System Cephalomedullary Nail Surgical Technique Compact Case- Short Nails Only SMALL Zimmer Natural Nail System Cephalomedullary Nail Technique - Small 1 Zimmer Natural Nail System
Università di Roma La Sapienza. Medical Robotics. A Teleoperation System for Research in MIRS. Marilena Vendittelli
 Università di Roma La Sapienza Medical Robotics A Teleoperation System for Research in MIRS Marilena Vendittelli the DLR teleoperation system slave three versatile robots MIRO light-weight: weight < 10
Università di Roma La Sapienza Medical Robotics A Teleoperation System for Research in MIRS Marilena Vendittelli the DLR teleoperation system slave three versatile robots MIRO light-weight: weight < 10
Medical Robotics Overview of the course
 Medical Robotics Overview of the course September 2017 Guillaume.Morel@upmc.fr Professor in Robotics @ ISIR, UPMC Head of AGATHE, INSERM U1150 Director of Carnot Interfaces Co-founder of GEMA Scope Although
Medical Robotics Overview of the course September 2017 Guillaume.Morel@upmc.fr Professor in Robotics @ ISIR, UPMC Head of AGATHE, INSERM U1150 Director of Carnot Interfaces Co-founder of GEMA Scope Although
Zimmer Natural Nail System
 Zimmer Natural Nail System Cephalomedullary Nail Surgical Technique Compact Case - Short Nails Only STANDARD Zimmer Natural Nail System Cephalomedullary Nail Surgical Technique - Standard 1 Zimmer Natural
Zimmer Natural Nail System Cephalomedullary Nail Surgical Technique Compact Case - Short Nails Only STANDARD Zimmer Natural Nail System Cephalomedullary Nail Surgical Technique - Standard 1 Zimmer Natural
Haptic Virtual Fixtures for Robot-Assisted Manipulation
 Haptic Virtual Fixtures for Robot-Assisted Manipulation Jake J. Abbott, Panadda Marayong, and Allison M. Okamura Department of Mechanical Engineering, The Johns Hopkins University Baltimore, Maryland,
Haptic Virtual Fixtures for Robot-Assisted Manipulation Jake J. Abbott, Panadda Marayong, and Allison M. Okamura Department of Mechanical Engineering, The Johns Hopkins University Baltimore, Maryland,
Horizon. Your innovative partner in medicine technology.
 Horizon Valve Channel - Minimally Invasive Valve Surgery Original, Advanced, The Next Generation, Accessories, Sterilisation Container Your innovative partner in medicine technology. micvision.indd 1 08.10.2009
Horizon Valve Channel - Minimally Invasive Valve Surgery Original, Advanced, The Next Generation, Accessories, Sterilisation Container Your innovative partner in medicine technology. micvision.indd 1 08.10.2009
Through the range of motion with NAVIO Instructional course
 Enabling robotic-assisted technologies arthoplasty Through the range of motion with NAVIO Instructional course Preliminary programme Invited chairman: Prof Sébastien Lustig (France) Expert Connect Centre,
Enabling robotic-assisted technologies arthoplasty Through the range of motion with NAVIO Instructional course Preliminary programme Invited chairman: Prof Sébastien Lustig (France) Expert Connect Centre,
Computer Assisted Abdominal
 Computer Assisted Abdominal Surgery and NOTES Prof. Luc Soler, Prof. Jacques Marescaux University of Strasbourg, France In the past IRCAD Strasbourg + Taiwain More than 3.000 surgeons trained per year,,
Computer Assisted Abdominal Surgery and NOTES Prof. Luc Soler, Prof. Jacques Marescaux University of Strasbourg, France In the past IRCAD Strasbourg + Taiwain More than 3.000 surgeons trained per year,,
5HDO 7LPH 6XUJLFDO 6LPXODWLRQ ZLWK +DSWLF 6HQVDWLRQ DV &ROODERUDWHG :RUNV EHWZHHQ -DSDQ DQG *HUPDQ\
 nsuzuki@jikei.ac.jp 1016 N. Suzuki et al. 1). The system should provide a design for the user and determine surgical procedures based on 3D model reconstructed from the patient's data. 2). The system must
nsuzuki@jikei.ac.jp 1016 N. Suzuki et al. 1). The system should provide a design for the user and determine surgical procedures based on 3D model reconstructed from the patient's data. 2). The system must
Biodynamics medical technology is the centre of excellence in the area of endoprosthetics and is specialised in joint implants and instruments.
 2 3 Biodynamics medical technology is the centre of excellence in the area of endoprosthetics and is specialised in joint implants and instruments. CUSTOMER ORIENTATION AS A MATTER OF PRINCIPLE We stand
2 3 Biodynamics medical technology is the centre of excellence in the area of endoprosthetics and is specialised in joint implants and instruments. CUSTOMER ORIENTATION AS A MATTER OF PRINCIPLE We stand
Maneesh Dewan.
 Maneesh Dewan maneeshdewan@gmail.com www.cs.jhu.edu/~maneesh 510 Hampton Court, 51 Valley Stream Parkway, E51 West Chester, PA 19380. Malvern, PA 19355. Phone: (410) 900 8804 (C) Phone: (610) 219 4391
Maneesh Dewan maneeshdewan@gmail.com www.cs.jhu.edu/~maneesh 510 Hampton Court, 51 Valley Stream Parkway, E51 West Chester, PA 19380. Malvern, PA 19355. Phone: (410) 900 8804 (C) Phone: (610) 219 4391
Fibula Plating System
 ANATOMIC LOCKED PLATING SYSTEM Fibula Plating System Securing optimal fixation through versatile locked and compression plating technology Contents Surgeon Design Team 2 Introduction 3 Anatomic Fibula
ANATOMIC LOCKED PLATING SYSTEM Fibula Plating System Securing optimal fixation through versatile locked and compression plating technology Contents Surgeon Design Team 2 Introduction 3 Anatomic Fibula
Small Occupancy Robotic Mechanisms for Endoscopic Surgery
 Small Occupancy Robotic Mechanisms for Endoscopic Surgery Yuki Kobayashi, Shingo Chiyoda, Kouichi Watabe, Masafumi Okada, and Yoshihiko Nakamura Department of Mechano-Informatics, The University of Tokyo,
Small Occupancy Robotic Mechanisms for Endoscopic Surgery Yuki Kobayashi, Shingo Chiyoda, Kouichi Watabe, Masafumi Okada, and Yoshihiko Nakamura Department of Mechano-Informatics, The University of Tokyo,
A free-extending two part cannulated screw that will elongate with growth. SURGICAL TECHNIQUE
 A free-extending two part cannulated screw that will elongate with growth. SURGICAL TECHNIQUE The Free-Gliding SCFE Screw System, designed to treat the most common hip problem in growing children, SLIPPED
A free-extending two part cannulated screw that will elongate with growth. SURGICAL TECHNIQUE The Free-Gliding SCFE Screw System, designed to treat the most common hip problem in growing children, SLIPPED
Research article Methods for haptic feedback in teleoperated robot-assisted surgery
 Research article Methods for haptic feedback in teleoperated robot-assisted surgery The author is based in the Department of Mechanical Engineering, The Johns Hopkins University, Baltimore, Maryland, USA.
Research article Methods for haptic feedback in teleoperated robot-assisted surgery The author is based in the Department of Mechanical Engineering, The Johns Hopkins University, Baltimore, Maryland, USA.
Tianjin Onehealth Medical Instruments. Onehealth Your surgical solutions partner
 Tianjin Onehealth Medical Instruments Introduction Tianjin Onehealth Medical Instruments Co Ltd is a part of KXBD Group which was established in 2006. Onehealth has a long term and massive investment strategy
Tianjin Onehealth Medical Instruments Introduction Tianjin Onehealth Medical Instruments Co Ltd is a part of KXBD Group which was established in 2006. Onehealth has a long term and massive investment strategy
2D, 3D CT Intervention, and CT Fluoroscopy
 2D, 3D CT Intervention, and CT Fluoroscopy SOMATOM Definition, Definition AS, Definition Flash Answers for life. Siemens CT Vision Siemens CT Vision The justification for the existence of the entire medical
2D, 3D CT Intervention, and CT Fluoroscopy SOMATOM Definition, Definition AS, Definition Flash Answers for life. Siemens CT Vision Siemens CT Vision The justification for the existence of the entire medical
Summer Engineering Research Internship for US Students (SERIUS) Department of Biomedical Engineering. (www.bioeng.nus.edu.
 Department of Biomedical Engineering. (www.bioeng.nus.edu.") Summer Engineering Research Internship for US Students (SERIUS) Host Department: Department of Biomedical Engineering (www.bioeng.nus.edu.sg) BME Project 1 Host department Department of Biomedical Engineering
Summer Engineering Research Internship for US Students (SERIUS) Host Department: Department of Biomedical Engineering (www.bioeng.nus.edu.sg) BME Project 1 Host department Department of Biomedical Engineering
Mizuho America Inc Ahern Avenue Union City, CA Phone No
 Hongo Shintoku Building 7F, 3-38- Hongo, Bunkyo-ku, Tokyo 3-0033, JAPAN Phone F a x U R L E-mail +8-3-385-70 +8-3-388-705 www.mizuhomedical.co.jp sales-dept@mizuhomedical.co.jp Caution Prior to product
Hongo Shintoku Building 7F, 3-38- Hongo, Bunkyo-ku, Tokyo 3-0033, JAPAN Phone F a x U R L E-mail +8-3-385-70 +8-3-388-705 www.mizuhomedical.co.jp sales-dept@mizuhomedical.co.jp Caution Prior to product
Cerclage Passer. For minimally invasive application of cerclage cables.
 Cerclage Passer. For minimally invasive application of cerclage cables. Handling Technique Cable application This publication is not intended for distribution in the USA. Instruments and implants approved
Cerclage Passer. For minimally invasive application of cerclage cables. Handling Technique Cable application This publication is not intended for distribution in the USA. Instruments and implants approved
Zimmer Natural Nail System. Cephalomedullary Nail Surgical Technique SMALL
 Zimmer Natural Nail System Cephalomedullary Nail Surgical Technique SMALL Zimmer Natural Nail System Cephalomedullary Nail Technique - Small 1 Zimmer Natural Nail System Cephalomedullary Nail Surgical
Zimmer Natural Nail System Cephalomedullary Nail Surgical Technique SMALL Zimmer Natural Nail System Cephalomedullary Nail Technique - Small 1 Zimmer Natural Nail System Cephalomedullary Nail Surgical
Using Web-Based Computer Graphics to Teach Surgery
 Using Web-Based Computer Graphics to Teach Surgery Ken Brodlie Nuha El-Khalili Ying Li School of Computer Studies University of Leeds Position Paper for GVE99, Coimbra, Portugal Surgical Training Surgical
Using Web-Based Computer Graphics to Teach Surgery Ken Brodlie Nuha El-Khalili Ying Li School of Computer Studies University of Leeds Position Paper for GVE99, Coimbra, Portugal Surgical Training Surgical
NIH Public Access Author Manuscript Proc IEEE RAS EMBS Int Conf Biomed Robot Biomechatron. Author manuscript; available in PMC 2014 March 17.
 NIH Public Access Author Manuscript Proc IEEE RAS EMBS Int Conf Biomed Robot Biomechatron. Author manuscript; available in PMC 2014 March 17. Published in final edited form as: Proc IEEE RAS EMBS Int Conf
NIH Public Access Author Manuscript Proc IEEE RAS EMBS Int Conf Biomed Robot Biomechatron. Author manuscript; available in PMC 2014 March 17. Published in final edited form as: Proc IEEE RAS EMBS Int Conf
State Estimation and Feedforward Tremor Suppression for a Handheld Micromanipulator with a Kalman Filter
 State Estimation and Feedforward Tremor Suppression for a Handheld Micromanipulator with a Kalman Filter Brian C. Becker, Student Member, IEEE, Robert A. MacLachlan, Member, IEEE, Cameron N. Riviere, Member,
State Estimation and Feedforward Tremor Suppression for a Handheld Micromanipulator with a Kalman Filter Brian C. Becker, Student Member, IEEE, Robert A. MacLachlan, Member, IEEE, Cameron N. Riviere, Member,
Evaluation of Haptic Virtual Fixtures in Psychomotor Skill Development for Robotic Surgical Training
 Department of Electronics, Information and Bioengineering Neuroengineering and medical robotics Lab Evaluation of Haptic Virtual Fixtures in Psychomotor Skill Development for Robotic Surgical Training
Department of Electronics, Information and Bioengineering Neuroengineering and medical robotics Lab Evaluation of Haptic Virtual Fixtures in Psychomotor Skill Development for Robotic Surgical Training