Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
|
|
|
- August Parsons
- 6 years ago
- Views:
Transcription
1 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute

2 Use an example to explain what is admittance control? You may refer to exoskeleton What is ZMP, and how to determine it? You can draw a figure 2


3 3
4 In hand manipulation Coordinate many fingers and their independently controlled joints? Hand-arm coordination How to adapt the arm posture to maximize the benefit of hand? Bimanual coordination Temporal and spatial coordination? 4



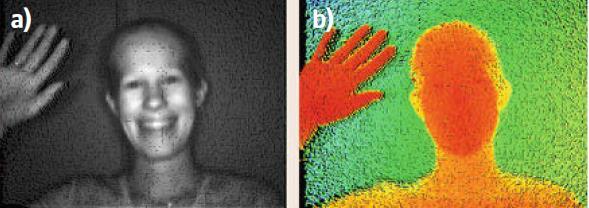
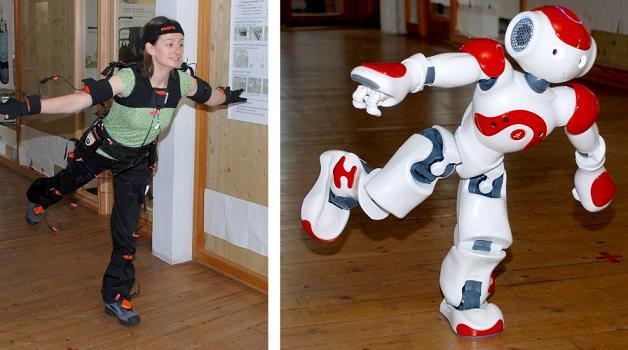
5 Expressive morphology and behavior Interpreting human expression Natural response in physical human-robot interaction 5
6


7
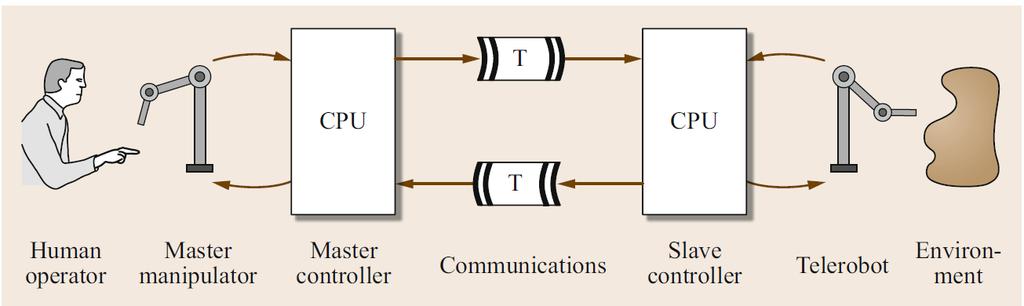
8 Control architectures How to divide the control effort between a human and a robot? Communication channels Unilateral, bilateral 8
9 9
10 Passivity and stability Controllers? Many What make things worse Time delay Package loss 10
11 Teleoperation of mobile robots Kinematics dissimilarity? Driving an under-actuated robot? Collision avoidance? 11
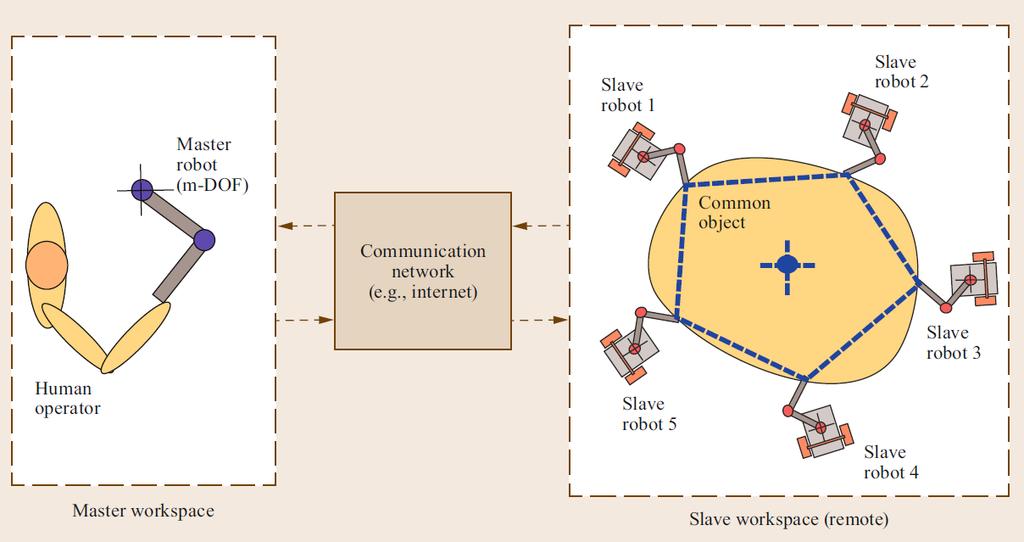
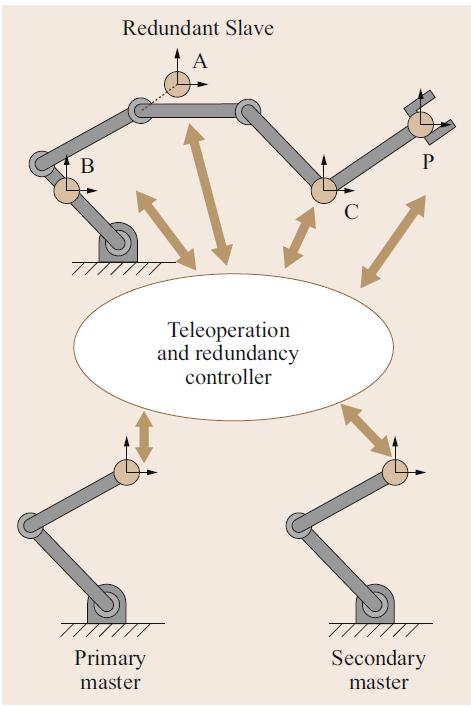
12 Multi-lateral teleoperation 12


13 Haptics has all the problems that teleoperation has, and more I don t know what they will say to each other 13


14 Rendering virtual environment Virtual environment is discretized Stiff contact Complex geometry 14
15 Hardware development Haptic device is nothing but a robot Mechanical design, encoders and force sensors, actuation and transmission, You can turn a robot to haptic device, but remember High frequency for high perception fidelity Typical 1000 Hz 15

16 More than feeling a force You skin can feel a lot of things. How to render rich haptic perception? 16

17 Fidelity and richness of haptic perception On robot side interface development, sensors and sensor integration, On human side understanding the neuroscience of haptics, haptic perception stimulation Wearable haptics For daily activities Soft haptics and soft robotics
18
19 Building artificial humans to Understand humans Substitute humans Work with humans

20 Correspondence Demonstration interfaces Learning algorithms 20

21 Motion correspondence Perception correspondence

22 22


23 23
24 Demonstration data? Learning individual/compound motions? Learning task-specified motion/generalized motor skills? Learning from successes/failures? 24
25 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
26 Lab equipment Course projects 26

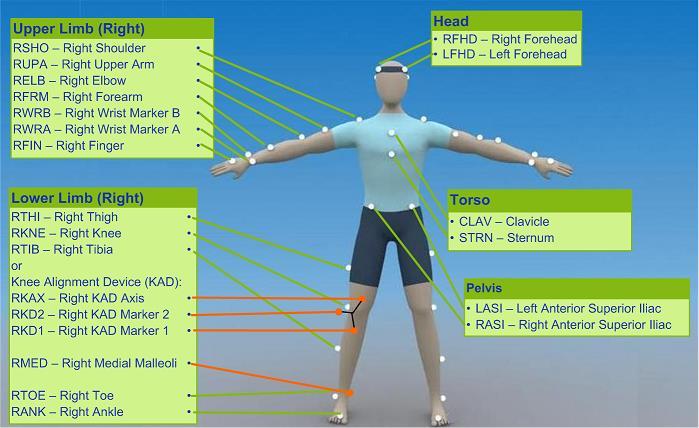
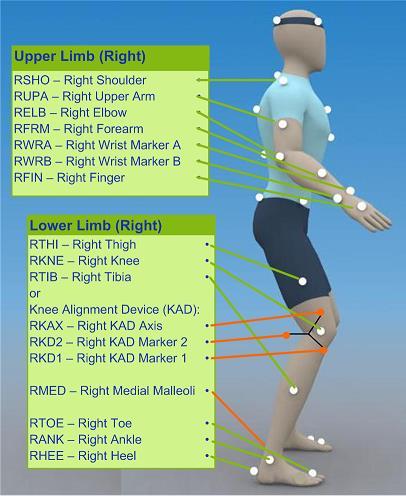
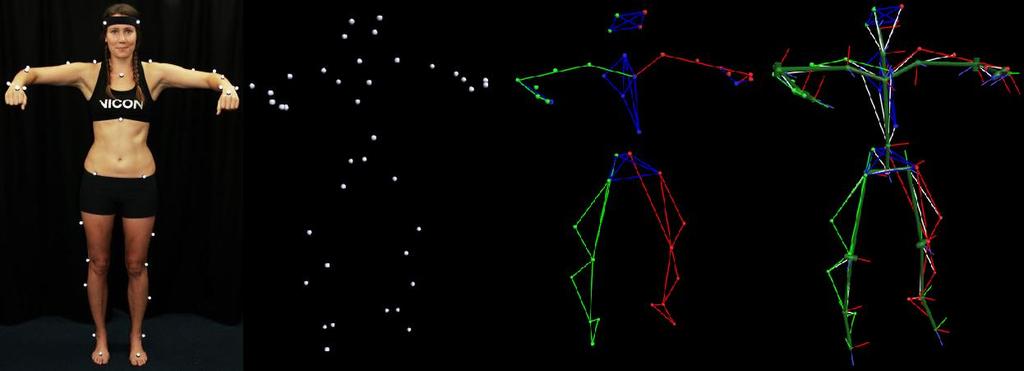
27 Tele-nursing robotic system, under integration Vicon Mocap system Passive driver testbed 27

28 Available for projects Baxter robot Mobile base Compliant grippers 3D cameras 28

29 Available for projects Geomagic touch haptic devices Control software supporting various input devices 29
 Software Nexus human motion")
30 Hardware 10 cameras Vero 2.2 Max frame rate = 330 Hz Resolution 2048 x 1088 = 2.2 MP Covered space = 17 ft X 21 ft 8 on railing + 2 on ground (for closer view) Software Nexus human motion analysis Tracker object tracking 30
31 31
32 32
33 33
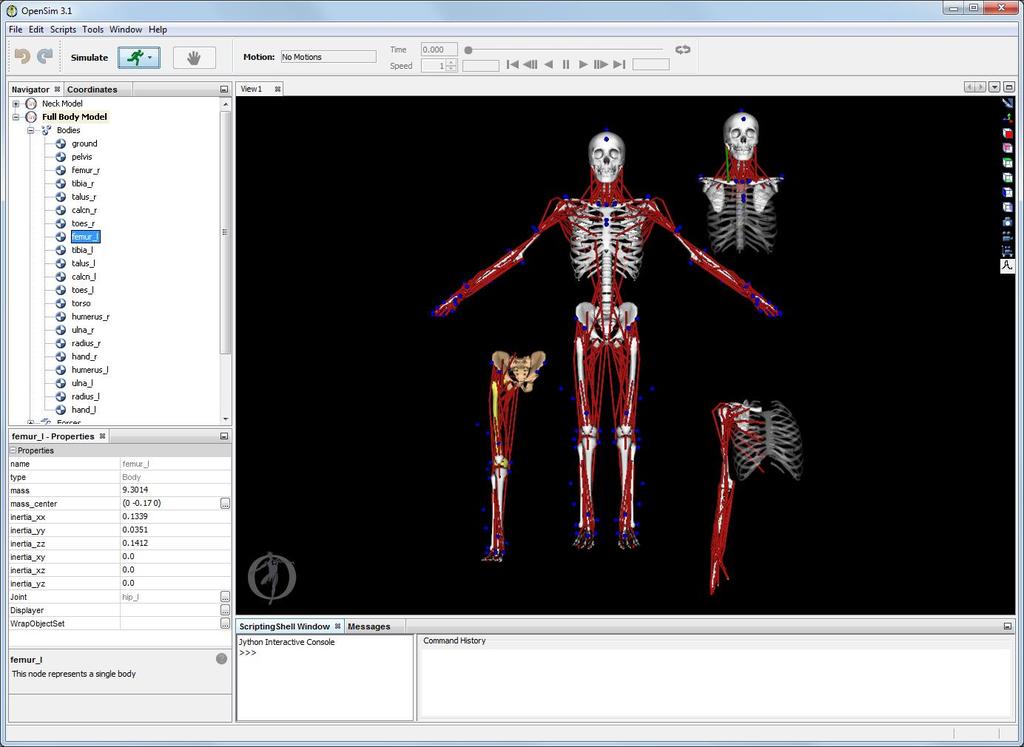
34 Vicon Nexus 2.5 documentation Vicon tutorial on you tube: OpenSim Documentation ntation 34

35
36 Human Motion Study (M) Mocap system, nexus motion analysis, OpenSim Hardware development (D) Mechatronics, CAD design, Java/C++ Programming Algorithm development (A) Mocap system, ROS, C++/Python, Matlab Virtual Reality and haptics (H) C++ programming Human robot interaction (I) Mocap system, C++/Python Programming 36


37 Study user experience in normal driving scenario Model integrated Controller under development Need human motion data to validate 37



38 Collection motion data from human subjects Steering wheel, shifting stick, pressing pedal Perform motion analysis to study Motion coordination, force responses 38




39 Hardware mostly ready Car racing simulator + Vicon Need a stick shift Need force sensors (from Greg?) Project contact Kene Mbanisi <kcmbanisi@wpi.edu> 39

40 Advantages Imitating motions of human characteristics Context-specific demonstration instances More intuitive to operators Challenges Collecting demos time-consuming and tedious Motor skills generalization 40
41 41

42 Teleoperation for reaching motion done Need to do Teleoperation for grasping control Algorithm for motion generalization Project contact: Sihui Li Srikanth Malla - only for setting up mocap teleoperation 42


43 43

44 Tasks Use 3D camera to tracking human hand position Reactive control robot receiver actively reaches out to take the object from human giver 44
45 Platform ready Humanoid nursing robot + kinect Need to do Setup vision-based control Implement human motion/intent prediction algorithm Project contact Gunnar Horve <gchorve@wpi.edu> 45

46 Home-based stroke rehabilitation Continuous, repetitive exercises at home Adapt to the patient s level of motor skills and training progress 3D printed haptic device Inexpensive Customized design Fast manufacturing 46
47 Specifications for development 3-DOF manipulator, 3D printed Motion range ~ 1 meter, to cover most of arm motion range End-effector payload ~ 4-6 kg Development support Kevin Harrington (harrington@wpi.edu ), robotics lab manager Reference: Quick Kinematic design Bowler Studio: Project Contact Nathaniel Goldfarb <nagoldfarb@wpi.edu> 47


48 48

49 Inter-arm coupling due to cross-hemisphere talk 49

50 Compare motion characteristics at joint and muscle levels Healthy subjects: Dominant vs Non-dominant arms Stroke patients: Healthy vs Paretic arms 50
51 Data has been collected and processed Need to apply machine learning algorithms to extract useful information 51
52 52

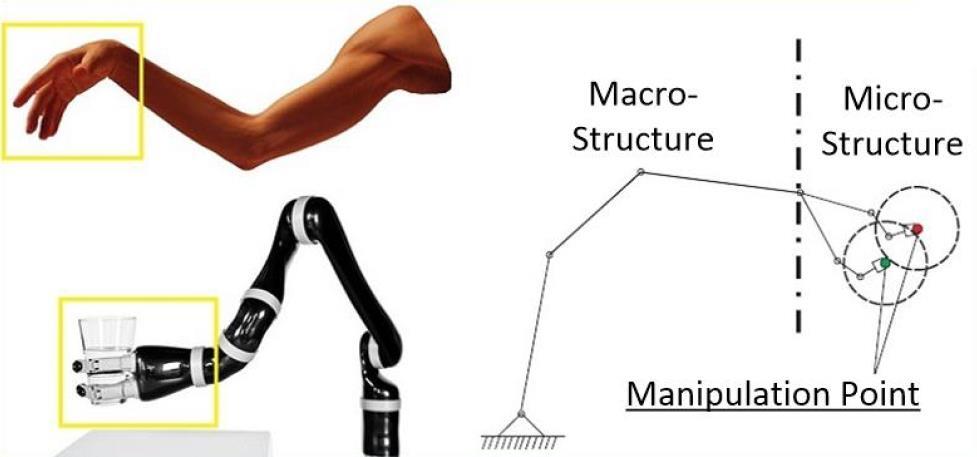
53 Arm Gross positioning Hand & fingers Precise reaching Fine manipulation 53


54 Coordinate manipulation endeffector with mobile manipulator Coordinate manipulation tool tip with surgical robot arm 54
55 Collect motion data on precise and dexterous manipulation Precise finger positioning & grasping, knob-turning, button-pressing Use machine learning algorithms to Generalize motor skills Study arm-hand-finger joint coupling 55
56 Prof. Cagdas Onal Motion control of prothetic limb Prof. Greg Fischer Developing hand exoskeleton 56

57 Fill in project selection form First and second choices for course project Preferred teammates Justification for your choice Previous course work, projects Reach out to your classmates actively Make sure your team members cover the required skills for the project 57
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute State one reason for investigating and building humanoid robot (4 pts) List two
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute State one reason for investigating and building humanoid robot (4 pts) List two
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) Explain the difference between navigation using visibility map and potential
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) Explain the difference between navigation using visibility map and potential
2. Introduction to Computer Haptics
 2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
CS277 - Experimental Haptics Lecture 2. Haptic Rendering
 CS277 - Experimental Haptics Lecture 2 Haptic Rendering Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering A note on timing...
CS277 - Experimental Haptics Lecture 2 Haptic Rendering Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering A note on timing...
Robotic System Simulation and Modeling Stefan Jörg Robotic and Mechatronic Center
 Robotic System Simulation and ing Stefan Jörg Robotic and Mechatronic Center Outline Introduction The SAFROS Robotic System Simulator Robotic System ing Conclusions Folie 2 DLR s Mirosurge: A versatile
Robotic System Simulation and ing Stefan Jörg Robotic and Mechatronic Center Outline Introduction The SAFROS Robotic System Simulator Robotic System ing Conclusions Folie 2 DLR s Mirosurge: A versatile
FALL 2014, Issue No. 32 ROBOTICS AT OUR FINGERTIPS
 FALL 2014, Issue No. 32 ROBOTICS AT OUR FINGERTIPS FALL 2014 Issue No. 32 12 CYBERSECURITY SOLUTION NSF taps UCLA Engineering to take lead in encryption research. Cover Photo: Joanne Leung 6MAN AND MACHINE
FALL 2014, Issue No. 32 ROBOTICS AT OUR FINGERTIPS FALL 2014 Issue No. 32 12 CYBERSECURITY SOLUTION NSF taps UCLA Engineering to take lead in encryption research. Cover Photo: Joanne Leung 6MAN AND MACHINE
Haptic Rendering CPSC / Sonny Chan University of Calgary
 Haptic Rendering CPSC 599.86 / 601.86 Sonny Chan University of Calgary Today s Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering
Haptic Rendering CPSC 599.86 / 601.86 Sonny Chan University of Calgary Today s Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering
Available theses (October 2011) MERLIN Group
 MERLIN Group") Available theses (October 2011) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Available theses (October 2011) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
The Haptic Impendance Control through Virtual Environment Force Compensation
 The Haptic Impendance Control through Virtual Environment Force Compensation OCTAVIAN MELINTE Robotics and Mechatronics Department Institute of Solid Mechanicsof the Romanian Academy ROMANIA octavian.melinte@yahoo.com
The Haptic Impendance Control through Virtual Environment Force Compensation OCTAVIAN MELINTE Robotics and Mechatronics Department Institute of Solid Mechanicsof the Romanian Academy ROMANIA octavian.melinte@yahoo.com
Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Politecnico di Milano - Dipartimento di Elettronica, Informazione e Bioingegneria Industrial robotics
Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Politecnico di Milano - Dipartimento di Elettronica, Informazione e Bioingegneria Industrial robotics
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (6 pts )A 2-DOF manipulator arm is attached to a mobile base with non-holonomic
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (6 pts )A 2-DOF manipulator arm is attached to a mobile base with non-holonomic
John Henry Foster INTRODUCING OUR NEW ROBOTICS LINE. Imagine Your Business...better. Automate Virtually Anything jhfoster.
 John Henry Foster INTRODUCING OUR NEW ROBOTICS LINE Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 What if you could automate the repetitive manual
John Henry Foster INTRODUCING OUR NEW ROBOTICS LINE Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 What if you could automate the repetitive manual
Peter Berkelman. ACHI/DigitalWorld
 Magnetic Levitation Haptic Peter Berkelman ACHI/DigitalWorld February 25, 2013 Outline: Haptics - Force Feedback Sample devices: Phantoms, Novint Falcon, Force Dimension Inertia, friction, hysteresis/backlash
Magnetic Levitation Haptic Peter Berkelman ACHI/DigitalWorld February 25, 2013 Outline: Haptics - Force Feedback Sample devices: Phantoms, Novint Falcon, Force Dimension Inertia, friction, hysteresis/backlash
Robotic Capture and De-Orbit of a Tumbling and Heavy Target from Low Earth Orbit
 www.dlr.de Chart 1 Robotic Capture and De-Orbit of a Tumbling and Heavy Target from Low Earth Orbit Steffen Jaekel, R. Lampariello, G. Panin, M. Sagardia, B. Brunner, O. Porges, and E. Kraemer (1) M. Wieser,
www.dlr.de Chart 1 Robotic Capture and De-Orbit of a Tumbling and Heavy Target from Low Earth Orbit Steffen Jaekel, R. Lampariello, G. Panin, M. Sagardia, B. Brunner, O. Porges, and E. Kraemer (1) M. Wieser,
Proprioception & force sensing
 Proprioception & force sensing Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jussi Rantala, Jukka
Proprioception & force sensing Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jussi Rantala, Jukka
Evaluation of Haptic Virtual Fixtures in Psychomotor Skill Development for Robotic Surgical Training
 Department of Electronics, Information and Bioengineering Neuroengineering and medical robotics Lab Evaluation of Haptic Virtual Fixtures in Psychomotor Skill Development for Robotic Surgical Training
Department of Electronics, Information and Bioengineering Neuroengineering and medical robotics Lab Evaluation of Haptic Virtual Fixtures in Psychomotor Skill Development for Robotic Surgical Training
Laboratory Mini-Projects Summary
 ME 4290/5290 Mechanics & Control of Robotic Manipulators Dr. Bob, Fall 2017 Robotics Laboratory Mini-Projects (LMP 1 8) Laboratory Exercises: The laboratory exercises are to be done in teams of two (or
ME 4290/5290 Mechanics & Control of Robotic Manipulators Dr. Bob, Fall 2017 Robotics Laboratory Mini-Projects (LMP 1 8) Laboratory Exercises: The laboratory exercises are to be done in teams of two (or
IMGD 3100 Novel Interfaces for Interactive Environments: Physical Input
 IMGD 3100 Novel Interfaces for Interactive Environments: Physical Input Robert W. Lindeman Associate Professor Human Interaction in Virtual Environments (HIVE) Lab Department of Computer Science Worcester
IMGD 3100 Novel Interfaces for Interactive Environments: Physical Input Robert W. Lindeman Associate Professor Human Interaction in Virtual Environments (HIVE) Lab Department of Computer Science Worcester
Haptics CS327A
 Haptics CS327A - 217 hap tic adjective relating to the sense of touch or to the perception and manipulation of objects using the senses of touch and proprioception 1 2 Slave Master 3 Courtesy of Walischmiller
Haptics CS327A - 217 hap tic adjective relating to the sense of touch or to the perception and manipulation of objects using the senses of touch and proprioception 1 2 Slave Master 3 Courtesy of Walischmiller
Cognitive robots and emotional intelligence Cloud robotics Ethical, legal and social issues of robotic Construction robots Human activities in many
 Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
ROBOTIC AUTOMATION Imagine Your Business...better. Automate Virtually Anything
 John Henry Foster ROBOTIC AUTOMATION Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 At John Henry Foster, we re devoted to bringing safe, flexible,
John Henry Foster ROBOTIC AUTOMATION Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 At John Henry Foster, we re devoted to bringing safe, flexible,
Virtual Reality in Neuro- Rehabilitation and Beyond
 Virtual Reality in Neuro- Rehabilitation and Beyond Amanda Carr, OTRL, CBIS Origami Brain Injury Rehabilitation Center Director of Rehabilitation Amanda.Carr@origamirehab.org Objectives Define virtual
Virtual Reality in Neuro- Rehabilitation and Beyond Amanda Carr, OTRL, CBIS Origami Brain Injury Rehabilitation Center Director of Rehabilitation Amanda.Carr@origamirehab.org Objectives Define virtual
Franka Emika GmbH. Our vision of a robot for everyone sensitive, interconnected, adaptive and cost-efficient.
 Franka Emika GmbH Our vision of a robot for everyone sensitive, interconnected, adaptive and cost-efficient. Even today, robotics remains a technology accessible only to few. The reasons for this are the
Franka Emika GmbH Our vision of a robot for everyone sensitive, interconnected, adaptive and cost-efficient. Even today, robotics remains a technology accessible only to few. The reasons for this are the
Using Simulation to Design Control Strategies for Robotic No-Scar Surgery
 Using Simulation to Design Control Strategies for Robotic No-Scar Surgery Antonio DE DONNO 1, Florent NAGEOTTE, Philippe ZANNE, Laurent GOFFIN and Michel de MATHELIN LSIIT, University of Strasbourg/CNRS,
Using Simulation to Design Control Strategies for Robotic No-Scar Surgery Antonio DE DONNO 1, Florent NAGEOTTE, Philippe ZANNE, Laurent GOFFIN and Michel de MATHELIN LSIIT, University of Strasbourg/CNRS,
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
Job Description. Commitment: Must be available to work full-time hours, M-F for weeks beginning Summer of 2018.
 Research Intern Director of Research We are seeking a summer intern to support the team to develop prototype 3D sensing systems based on state-of-the-art sensing technologies along with computer vision
Research Intern Director of Research We are seeking a summer intern to support the team to develop prototype 3D sensing systems based on state-of-the-art sensing technologies along with computer vision
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (4 pts) Derive Dynamic equations and state space representation for the system.
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (4 pts) Derive Dynamic equations and state space representation for the system.
Information and Program
 Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Accessible Power Tool Flexible Application Scalable Solution
 Accessible Power Tool Flexible Application Scalable Solution Franka Emika GmbH Our vision of a robot for everyone sensitive, interconnected, adaptive and cost-efficient. Even today, robotics remains a
Accessible Power Tool Flexible Application Scalable Solution Franka Emika GmbH Our vision of a robot for everyone sensitive, interconnected, adaptive and cost-efficient. Even today, robotics remains a
CS277 - Experimental Haptics Lecture 1. Introduction to Haptics
 CS277 - Experimental Haptics Lecture 1 Introduction to Haptics Haptic Interfaces Enables physical interaction with virtual objects Haptic Rendering Potential Fields Polygonal Meshes Implicit Surfaces Volumetric
CS277 - Experimental Haptics Lecture 1 Introduction to Haptics Haptic Interfaces Enables physical interaction with virtual objects Haptic Rendering Potential Fields Polygonal Meshes Implicit Surfaces Volumetric
Modeling and Experimental Studies of a Novel 6DOF Haptic Device
 Proceedings of The Canadian Society for Mechanical Engineering Forum 2010 CSME FORUM 2010 June 7-9, 2010, Victoria, British Columbia, Canada Modeling and Experimental Studies of a Novel DOF Haptic Device
Proceedings of The Canadian Society for Mechanical Engineering Forum 2010 CSME FORUM 2010 June 7-9, 2010, Victoria, British Columbia, Canada Modeling and Experimental Studies of a Novel DOF Haptic Device
Introduction To Robotics (Kinematics, Dynamics, and Design)
") Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
Prospective Teleautonomy For EOD Operations
 Perception and task guidance Perceived world model & intent Prospective Teleautonomy For EOD Operations Prof. Seth Teller Electrical Engineering and Computer Science Department Computer Science and Artificial
Perception and task guidance Perceived world model & intent Prospective Teleautonomy For EOD Operations Prof. Seth Teller Electrical Engineering and Computer Science Department Computer Science and Artificial
phri: specialization groups HS PRELIMINARY
 phri: specialization groups HS 2019 - PRELIMINARY 1) VELOCITY ESTIMATION WITH HALL EFFECT SENSOR 2) VELOCITY MEASUREMENT: TACHOMETER VS HALL SENSOR 3) POSITION AND VELOCTIY ESTIMATION BASED ON KALMAN FILTER
phri: specialization groups HS 2019 - PRELIMINARY 1) VELOCITY ESTIMATION WITH HALL EFFECT SENSOR 2) VELOCITY MEASUREMENT: TACHOMETER VS HALL SENSOR 3) POSITION AND VELOCTIY ESTIMATION BASED ON KALMAN FILTER
FP7 ICT Call 6: Cognitive Systems and Robotics
 FP7 ICT Call 6: Cognitive Systems and Robotics Information day Luxembourg, January 14, 2010 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media
FP7 ICT Call 6: Cognitive Systems and Robotics Information day Luxembourg, January 14, 2010 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media
Robot Hands: Mechanics, Contact Constraints, and Design for Open-loop Performance
 Robot Hands: Mechanics, Contact Constraints, and Design for Open-loop Performance Aaron M. Dollar John J. Lee Associate Professor of Mechanical Engineering and Materials Science Aerial Robotics Yale GRAB
Robot Hands: Mechanics, Contact Constraints, and Design for Open-loop Performance Aaron M. Dollar John J. Lee Associate Professor of Mechanical Engineering and Materials Science Aerial Robotics Yale GRAB
Sustainable & Intelligent Robotics Group Projects
 Machine learning for robotic grasping Hyb-Re glove for hand rehabilitation Hyb-Knee for gait augmentation Colonoscopy view range expansion device Sustainable & Intelligent Robotics Group Projects Supervisor:
Machine learning for robotic grasping Hyb-Re glove for hand rehabilitation Hyb-Knee for gait augmentation Colonoscopy view range expansion device Sustainable & Intelligent Robotics Group Projects Supervisor:
VR Haptic Interfaces for Teleoperation : an Evaluation Study
 VR Haptic Interfaces for Teleoperation : an Evaluation Study Renaud Ott, Mario Gutiérrez, Daniel Thalmann, Frédéric Vexo Virtual Reality Laboratory Ecole Polytechnique Fédérale de Lausanne (EPFL) CH-1015
VR Haptic Interfaces for Teleoperation : an Evaluation Study Renaud Ott, Mario Gutiérrez, Daniel Thalmann, Frédéric Vexo Virtual Reality Laboratory Ecole Polytechnique Fédérale de Lausanne (EPFL) CH-1015
Lecture 1: Introduction to haptics and Kinesthetic haptic devices
 ME 327: Design and Control of Haptic Systems Winter 2018 Lecture 1: Introduction to haptics and Kinesthetic haptic devices Allison M. Okamura Stanford University today s objectives introduce you to the
ME 327: Design and Control of Haptic Systems Winter 2018 Lecture 1: Introduction to haptics and Kinesthetic haptic devices Allison M. Okamura Stanford University today s objectives introduce you to the
Performance Issues in Collaborative Haptic Training
 27 IEEE International Conference on Robotics and Automation Roma, Italy, 1-14 April 27 FrA4.4 Performance Issues in Collaborative Haptic Training Behzad Khademian and Keyvan Hashtrudi-Zaad Abstract This
27 IEEE International Conference on Robotics and Automation Roma, Italy, 1-14 April 27 FrA4.4 Performance Issues in Collaborative Haptic Training Behzad Khademian and Keyvan Hashtrudi-Zaad Abstract This
Haptic interaction. Ruth Aylett
 Haptic interaction Ruth Aylett Contents Haptic definition Haptic model Haptic devices Measuring forces Haptic Technologies Haptics refers to manual interactions with environments, such as sensorial exploration
Haptic interaction Ruth Aylett Contents Haptic definition Haptic model Haptic devices Measuring forces Haptic Technologies Haptics refers to manual interactions with environments, such as sensorial exploration
On Application of Virtual Fixtures as an Aid for Telemanipulation and Training
 On Application of Virtual Fixtures as an Aid for Telemanipulation and Training Shahram Payandeh and Zoran Stanisic Experimental Robotics Laboratory (ERL) School of Engineering Science Simon Fraser University
On Application of Virtual Fixtures as an Aid for Telemanipulation and Training Shahram Payandeh and Zoran Stanisic Experimental Robotics Laboratory (ERL) School of Engineering Science Simon Fraser University
Why Humanoid Robots?*
 Why Humanoid Robots?* AJLONTECH * Largely adapted from Carlos Balaguer s talk in IURS 06 Outline Motivation What is a Humanoid Anyway? History of Humanoid Robots Why Develop Humanoids? Challenges in Humanoids
Why Humanoid Robots?* AJLONTECH * Largely adapted from Carlos Balaguer s talk in IURS 06 Outline Motivation What is a Humanoid Anyway? History of Humanoid Robots Why Develop Humanoids? Challenges in Humanoids
Università di Roma La Sapienza. Medical Robotics. A Teleoperation System for Research in MIRS. Marilena Vendittelli
 Università di Roma La Sapienza Medical Robotics A Teleoperation System for Research in MIRS Marilena Vendittelli the DLR teleoperation system slave three versatile robots MIRO light-weight: weight < 10
Università di Roma La Sapienza Medical Robotics A Teleoperation System for Research in MIRS Marilena Vendittelli the DLR teleoperation system slave three versatile robots MIRO light-weight: weight < 10
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics
 Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
MEAM 520. Haptic Rendering and Teleoperation
 MEAM 520 Haptic Rendering and Teleoperation Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture
MEAM 520 Haptic Rendering and Teleoperation Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture
CSE 165: 3D User Interaction. Lecture #14: 3D UI Design
 CSE 165: 3D User Interaction Lecture #14: 3D UI Design 2 Announcements Homework 3 due tomorrow 2pm Monday: midterm discussion Next Thursday: midterm exam 3D UI Design Strategies 3 4 Thus far 3DUI hardware
CSE 165: 3D User Interaction Lecture #14: 3D UI Design 2 Announcements Homework 3 due tomorrow 2pm Monday: midterm discussion Next Thursday: midterm exam 3D UI Design Strategies 3 4 Thus far 3DUI hardware
Dr. Ashish Dutta. Professor, Dept. of Mechanical Engineering Indian Institute of Technology Kanpur, INDIA
 Introduction: History of Robotics - past, present and future Dr. Ashish Dutta Professor, Dept. of Mechanical Engineering Indian Institute of Technology Kanpur, INDIA Origin of Automation: replacing human
Introduction: History of Robotics - past, present and future Dr. Ashish Dutta Professor, Dept. of Mechanical Engineering Indian Institute of Technology Kanpur, INDIA Origin of Automation: replacing human
Technologies. Philippe Fuchs Ecole des Mines, ParisTech, Paris, France. Virtual Reality: Concepts and. Guillaume Moreau.
 Virtual Reality: Concepts and Technologies Editors Philippe Fuchs Ecole des Mines, ParisTech, Paris, France Guillaume Moreau Ecole Centrale de Nantes, CERMA, Nantes, France Pascal Guitton INRIA, University
Virtual Reality: Concepts and Technologies Editors Philippe Fuchs Ecole des Mines, ParisTech, Paris, France Guillaume Moreau Ecole Centrale de Nantes, CERMA, Nantes, France Pascal Guitton INRIA, University
ROMEO Humanoid for Action and Communication. Rodolphe GELIN Aldebaran Robotics
 ROMEO Humanoid for Action and Communication Rodolphe GELIN Aldebaran Robotics 7 th workshop on Humanoid November Soccer 2012 Robots Osaka, November 2012 Overview French National Project labeled by Cluster
ROMEO Humanoid for Action and Communication Rodolphe GELIN Aldebaran Robotics 7 th workshop on Humanoid November Soccer 2012 Robots Osaka, November 2012 Overview French National Project labeled by Cluster
The DLR On-Orbit Servicing Testbed
 The DLR On-Orbit Servicing Testbed J. Artigas, R. Lampariello, B. Brunner, M. Stelzer, C. Borst, K. Landzettel, G. Hirzinger, A. Albu-Schäffer Robotics and Mechatronics Center, DLR VR-OOS Workshop 2012
The DLR On-Orbit Servicing Testbed J. Artigas, R. Lampariello, B. Brunner, M. Stelzer, C. Borst, K. Landzettel, G. Hirzinger, A. Albu-Schäffer Robotics and Mechatronics Center, DLR VR-OOS Workshop 2012
R (2) Controlling System Application with hands by identifying movements through Camera
 Controlling System Application with hands by identifying movements through Camera") R (2) N (5) Oral (3) Total (10) Dated Sign Assignment Group: C Problem Definition: Controlling System Application with hands by identifying movements through Camera Prerequisite: 1. Web Cam Connectivity
R (2) N (5) Oral (3) Total (10) Dated Sign Assignment Group: C Problem Definition: Controlling System Application with hands by identifying movements through Camera Prerequisite: 1. Web Cam Connectivity
Haptic Technology- Comprehensive Review Study with its Applications
 Haptic Technology- Comprehensive Review Study with its Applications Tanya Jaiswal 1, Rambha Yadav 2, Pooja Kedia 3 1,2 Student, Department of Computer Science and Engineering, Buddha Institute of Technology,
Haptic Technology- Comprehensive Review Study with its Applications Tanya Jaiswal 1, Rambha Yadav 2, Pooja Kedia 3 1,2 Student, Department of Computer Science and Engineering, Buddha Institute of Technology,
Medical Robotics. Part II: SURGICAL ROBOTICS
 5 Medical Robotics Part II: SURGICAL ROBOTICS In the last decade, surgery and robotics have reached a maturity that has allowed them to be safely assimilated to create a new kind of operating room. This
5 Medical Robotics Part II: SURGICAL ROBOTICS In the last decade, surgery and robotics have reached a maturity that has allowed them to be safely assimilated to create a new kind of operating room. This
Development of a Laboratory Kit for Robotics Engineering Education
 Development of a Laboratory Kit for Robotics Engineering Education Taskin Padir, William Michalson, Greg Fischer, Gary Pollice Worcester Polytechnic Institute Robotics Engineering Program tpadir@wpi.edu
Development of a Laboratory Kit for Robotics Engineering Education Taskin Padir, William Michalson, Greg Fischer, Gary Pollice Worcester Polytechnic Institute Robotics Engineering Program tpadir@wpi.edu
Touch Perception and Emotional Appraisal for a Virtual Agent
 Touch Perception and Emotional Appraisal for a Virtual Agent Nhung Nguyen, Ipke Wachsmuth, Stefan Kopp Faculty of Technology University of Bielefeld 33594 Bielefeld Germany {nnguyen, ipke, skopp}@techfak.uni-bielefeld.de
Touch Perception and Emotional Appraisal for a Virtual Agent Nhung Nguyen, Ipke Wachsmuth, Stefan Kopp Faculty of Technology University of Bielefeld 33594 Bielefeld Germany {nnguyen, ipke, skopp}@techfak.uni-bielefeld.de
Robot: Robonaut 2 The first humanoid robot to go to outer space
 ProfileArticle Robot: Robonaut 2 The first humanoid robot to go to outer space For the complete profile with media resources, visit: http://education.nationalgeographic.org/news/robot-robonaut-2/ Program
ProfileArticle Robot: Robonaut 2 The first humanoid robot to go to outer space For the complete profile with media resources, visit: http://education.nationalgeographic.org/news/robot-robonaut-2/ Program
Perception. Read: AIMA Chapter 24 & Chapter HW#8 due today. Vision
 11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
IOSR Journal of Engineering (IOSRJEN) e-issn: , p-issn: , Volume 2, Issue 11 (November 2012), PP 37-43
 e-issn: , p-issn: , Volume 2, Issue 11 (November 2012), PP 37-43") IOSR Journal of Engineering (IOSRJEN) e-issn: 2250-3021, p-issn: 2278-8719, Volume 2, Issue 11 (November 2012), PP 37-43 Operative Precept of robotic arm expending Haptic Virtual System Arnab Das 1, Swagat
IOSR Journal of Engineering (IOSRJEN) e-issn: 2250-3021, p-issn: 2278-8719, Volume 2, Issue 11 (November 2012), PP 37-43 Operative Precept of robotic arm expending Haptic Virtual System Arnab Das 1, Swagat
MEAM 520. Haptic Rendering and Teleoperation
 MEAM 520 Haptic Rendering and Teleoperation Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture
MEAM 520 Haptic Rendering and Teleoperation Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture
ME7752: Mechanics and Control of Robots Lecture 1
 ME7752: Mechanics and Control of Robots Lecture 1 Instructor: Manoj Srinivasan Office: E340 Scott Laboratory Email: srinivasan.88@osu.edu ( PDF posted. In the PDF, if there are no links to videos, do a
ME7752: Mechanics and Control of Robots Lecture 1 Instructor: Manoj Srinivasan Office: E340 Scott Laboratory Email: srinivasan.88@osu.edu ( PDF posted. In the PDF, if there are no links to videos, do a
Booklet of teaching units
 International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
Tele-operation of a Robot Arm with Electro Tactile Feedback
 F Tele-operation of a Robot Arm with Electro Tactile Feedback Daniel S. Pamungkas and Koren Ward * Abstract Tactile feedback from a remotely controlled robotic arm can facilitate certain tasks by enabling
F Tele-operation of a Robot Arm with Electro Tactile Feedback Daniel S. Pamungkas and Koren Ward * Abstract Tactile feedback from a remotely controlled robotic arm can facilitate certain tasks by enabling
Lab 7: Introduction to Webots and Sensor Modeling
 Lab 7: Introduction to Webots and Sensor Modeling This laboratory requires the following software: Webots simulator C development tools (gcc, make, etc.) The laboratory duration is approximately two hours.
Lab 7: Introduction to Webots and Sensor Modeling This laboratory requires the following software: Webots simulator C development tools (gcc, make, etc.) The laboratory duration is approximately two hours.
Lecture 23: Robotics. Instructor: Joelle Pineau Class web page: What is a robot?
 COMP 102: Computers and Computing Lecture 23: Robotics Instructor: (jpineau@cs.mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp102 What is a robot? The word robot is popularized by the Czech playwright
COMP 102: Computers and Computing Lecture 23: Robotics Instructor: (jpineau@cs.mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp102 What is a robot? The word robot is popularized by the Czech playwright
Force feedback interfaces & applications
 Force feedback interfaces & applications Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jukka Raisamo,
Force feedback interfaces & applications Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jukka Raisamo,
Introduction of Research Activity in Mechanical Systems Design Laboratory (Takeda s Lab) in Tokyo Tech
 in Tokyo Tech") Introduction of Research Activity in Mechanical Systems Design Laboratory (Takeda s Lab) in Tokyo Tech Kinematic design of asymmetrical position-orientation decoupled parallel mechanism with 5 dof Pipe
Introduction of Research Activity in Mechanical Systems Design Laboratory (Takeda s Lab) in Tokyo Tech Kinematic design of asymmetrical position-orientation decoupled parallel mechanism with 5 dof Pipe
Computer Assisted Medical Interventions
 Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue
Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue
Tele-operation of a robot arm with electro tactile feedback
 University of Wollongong Research Online Faculty of Engineering and Information Sciences - Papers: Part A Faculty of Engineering and Information Sciences 2013 Tele-operation of a robot arm with electro
University of Wollongong Research Online Faculty of Engineering and Information Sciences - Papers: Part A Faculty of Engineering and Information Sciences 2013 Tele-operation of a robot arm with electro
University of Geneva. Presentation of the CISA-CIN-BBL v. 2.3
 University of Geneva Presentation of the CISA-CIN-BBL 17.05.2018 v. 2.3 1 Evolution table Revision Date Subject 0.1 06.02.2013 Document creation. 1.0 08.02.2013 Contents added 1.5 12.02.2013 Some parts
University of Geneva Presentation of the CISA-CIN-BBL 17.05.2018 v. 2.3 1 Evolution table Revision Date Subject 0.1 06.02.2013 Document creation. 1.0 08.02.2013 Contents added 1.5 12.02.2013 Some parts
Robo$cs Introduc$on. ROS Workshop. Faculty of Informa$on Technology, Brno University of Technology Bozetechova 2, Brno
 Robo$cs Introduc$on ROS Workshop Faculty of Informa$on Technology, Brno University of Technology Bozetechova 2, 612 66 Brno name@fit.vutbr.cz What is a Robot? a programmable, mul.func.on manipulator USA
Robo$cs Introduc$on ROS Workshop Faculty of Informa$on Technology, Brno University of Technology Bozetechova 2, 612 66 Brno name@fit.vutbr.cz What is a Robot? a programmable, mul.func.on manipulator USA
A Feasibility Study of Time-Domain Passivity Approach for Bilateral Teleoperation of Mobile Manipulator
 International Conference on Control, Automation and Systems 2008 Oct. 14-17, 2008 in COEX, Seoul, Korea A Feasibility Study of Time-Domain Passivity Approach for Bilateral Teleoperation of Mobile Manipulator
International Conference on Control, Automation and Systems 2008 Oct. 14-17, 2008 in COEX, Seoul, Korea A Feasibility Study of Time-Domain Passivity Approach for Bilateral Teleoperation of Mobile Manipulator
Available theses (October 2012) MERLIN Group
 MERLIN Group") Available theses (October 2012) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Available theses (October 2012) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
SMart wearable Robotic Teleoperated surgery
 SMart wearable Robotic Teleoperated surgery This project has received funding from the European Union s Horizon 2020 research and innovation programme under grant agreement No 732515 Context Minimally
SMart wearable Robotic Teleoperated surgery This project has received funding from the European Union s Horizon 2020 research and innovation programme under grant agreement No 732515 Context Minimally
3D User Interfaces. Using the Kinect and Beyond. John Murray. John Murray
 Using the Kinect and Beyond // Center for Games and Playable Media // http://games.soe.ucsc.edu John Murray John Murray Expressive Title Here (Arial) Intelligence Studio Introduction to Interfaces User
Using the Kinect and Beyond // Center for Games and Playable Media // http://games.soe.ucsc.edu John Murray John Murray Expressive Title Here (Arial) Intelligence Studio Introduction to Interfaces User
Robotics Introduction Matteo Matteucci
 Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
FROM TORQUE-CONTROLLED TO INTRINSICALLY COMPLIANT
 FROM TORQUE-CONTROLLED TO INTRINSICALLY COMPLIANT HUMANOID by Christian Ott 1 Alexander Dietrich Daniel Leidner Alexander Werner Johannes Englsberger Bernd Henze Sebastian Wolf Maxime Chalon Werner Friedl
FROM TORQUE-CONTROLLED TO INTRINSICALLY COMPLIANT HUMANOID by Christian Ott 1 Alexander Dietrich Daniel Leidner Alexander Werner Johannes Englsberger Bernd Henze Sebastian Wolf Maxime Chalon Werner Friedl
Lecture 9: Teleoperation
 ME 327: Design and Control of Haptic Systems Autumn 2018 Lecture 9: Teleoperation Allison M. Okamura Stanford University teleoperation history and examples the genesis of teleoperation? a Polygraph is
ME 327: Design and Control of Haptic Systems Autumn 2018 Lecture 9: Teleoperation Allison M. Okamura Stanford University teleoperation history and examples the genesis of teleoperation? a Polygraph is
Dipartimento di Elettronica Informazione e Bioingegneria Robotics
 Dipartimento di Elettronica Informazione e Bioingegneria Robotics Behavioral robotics @ 2014 Behaviorism behave is what organisms do Behaviorism is built on this assumption, and its goal is to promote
Dipartimento di Elettronica Informazione e Bioingegneria Robotics Behavioral robotics @ 2014 Behaviorism behave is what organisms do Behaviorism is built on this assumption, and its goal is to promote
Korea Humanoid Robot Projects
 Korea Humanoid Robot Projects Jun Ho Oh HUBO Lab., KAIST KOREA Humanoid Projects(~2001) A few humanoid robot projects were existed. Most researches were on dynamic and kinematic simulations for walking
Korea Humanoid Robot Projects Jun Ho Oh HUBO Lab., KAIST KOREA Humanoid Projects(~2001) A few humanoid robot projects were existed. Most researches were on dynamic and kinematic simulations for walking
PICK AND PLACE HUMANOID ROBOT USING RASPBERRY PI AND ARDUINO FOR INDUSTRIAL APPLICATIONS
 PICK AND PLACE HUMANOID ROBOT USING RASPBERRY PI AND ARDUINO FOR INDUSTRIAL APPLICATIONS Bernard Franklin 1, Sachin.P 2, Jagadish.S 3, Shaista Noor 4, Rajashekhar C. Biradar 5 1,2,3,4,5 School of Electronics
PICK AND PLACE HUMANOID ROBOT USING RASPBERRY PI AND ARDUINO FOR INDUSTRIAL APPLICATIONS Bernard Franklin 1, Sachin.P 2, Jagadish.S 3, Shaista Noor 4, Rajashekhar C. Biradar 5 1,2,3,4,5 School of Electronics
Last Time: Acting Humanly: The Full Turing Test
 Last Time: Acting Humanly: The Full Turing Test Alan Turing's 1950 article Computing Machinery and Intelligence discussed conditions for considering a machine to be intelligent Can machines think? Can
Last Time: Acting Humanly: The Full Turing Test Alan Turing's 1950 article Computing Machinery and Intelligence discussed conditions for considering a machine to be intelligent Can machines think? Can
Tele-operated robotic arm and hand with intuitive control and haptic feedback
 American Journal of Aerospace Engineering 2014; 1(4): 21-27 Published online December 18, 2014 (http://www.sciencepublishinggroup.com/j/ajae) doi: 10.11648/j.ajae.20140104.11 Tele-operated robotic arm
American Journal of Aerospace Engineering 2014; 1(4): 21-27 Published online December 18, 2014 (http://www.sciencepublishinggroup.com/j/ajae) doi: 10.11648/j.ajae.20140104.11 Tele-operated robotic arm
PC-ROBOARM WITH EFFICIENT SPEED CONTROL AND PLANNING BASED ON WIRELESS TECHNOLOGY
 PC-ROBOARM WITH EFFICIENT SPEED CONTROL AND PLANNING BASED ON WIRELESS TECHNOLOGY Ms. M. Vennila 1, Ms. J. Anitha Thulasi 2 Associate Prof. &HOD / EEE Department 1, Assistant Professor /EEE Department
PC-ROBOARM WITH EFFICIENT SPEED CONTROL AND PLANNING BASED ON WIRELESS TECHNOLOGY Ms. M. Vennila 1, Ms. J. Anitha Thulasi 2 Associate Prof. &HOD / EEE Department 1, Assistant Professor /EEE Department
Overview of current developments in haptic APIs
 Central European Seminar on Computer Graphics for students, 2011 AUTHOR: Petr Kadleček SUPERVISOR: Petr Kmoch Overview of current developments in haptic APIs Presentation Haptics Haptic programming Haptic
Central European Seminar on Computer Graphics for students, 2011 AUTHOR: Petr Kadleček SUPERVISOR: Petr Kmoch Overview of current developments in haptic APIs Presentation Haptics Haptic programming Haptic
Milind R. Shinde #1, V. N. Bhaiswar *2, B. G. Achmare #3 1 Student of MTECH CAD/CAM, Department of Mechanical Engineering, GHRCE Nagpur, MH, India
 Design and simulation of robotic arm for loading and unloading of work piece on lathe machine by using workspace simulation software: A Review Milind R. Shinde #1, V. N. Bhaiswar *2, B. G. Achmare #3 1
Design and simulation of robotic arm for loading and unloading of work piece on lathe machine by using workspace simulation software: A Review Milind R. Shinde #1, V. N. Bhaiswar *2, B. G. Achmare #3 1
CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM
 CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM Aniket D. Kulkarni *1, Dr.Sayyad Ajij D. *2 *1(Student of E&C Department, MIT Aurangabad, India) *2(HOD of E&C department, MIT Aurangabad, India) aniket2212@gmail.com*1,
CONTROLLING METHODS AND CHALLENGES OF ROBOTIC ARM Aniket D. Kulkarni *1, Dr.Sayyad Ajij D. *2 *1(Student of E&C Department, MIT Aurangabad, India) *2(HOD of E&C department, MIT Aurangabad, India) aniket2212@gmail.com*1,
HAPTIC DEVICES FOR DESKTOP VIRTUAL PROTOTYPING APPLICATIONS
 The 3rd International Conference on Computational Mechanics and Virtual Engineering COMEC 2009 29 30 OCTOBER 2009, Brasov, Romania HAPTIC DEVICES FOR DESKTOP VIRTUAL PROTOTYPING APPLICATIONS A. Fratu 1,
The 3rd International Conference on Computational Mechanics and Virtual Engineering COMEC 2009 29 30 OCTOBER 2009, Brasov, Romania HAPTIC DEVICES FOR DESKTOP VIRTUAL PROTOTYPING APPLICATIONS A. Fratu 1,
¾ B-TECH (IT) ¾ B-TECH (IT)
 ¾ B-TECH (IT)") HAPTIC TECHNOLOGY V.R.Siddhartha Engineering College Vijayawada. Presented by Sudheer Kumar.S CH.Sreekanth ¾ B-TECH (IT) ¾ B-TECH (IT) Email:samudralasudheer@yahoo.com Email:shri_136@yahoo.co.in Introduction
HAPTIC TECHNOLOGY V.R.Siddhartha Engineering College Vijayawada. Presented by Sudheer Kumar.S CH.Sreekanth ¾ B-TECH (IT) ¾ B-TECH (IT) Email:samudralasudheer@yahoo.com Email:shri_136@yahoo.co.in Introduction
Comau AURA - Advanced Use Robotic Arm AURA. Soft as a Human Touch
 AURA Soft as a Human Touch 2 The Culture of Automation Designing advanced automation solutions means thinking about the industry in a new way, developing new scenarios, designing innovative products and
AURA Soft as a Human Touch 2 The Culture of Automation Designing advanced automation solutions means thinking about the industry in a new way, developing new scenarios, designing innovative products and
Computer Haptics and Applications
 Computer Haptics and Applications EURON Summer School 2003 Cagatay Basdogan, Ph.D. College of Engineering Koc University, Istanbul, 80910 (http://network.ku.edu.tr/~cbasdogan) Resources: EURON Summer School
Computer Haptics and Applications EURON Summer School 2003 Cagatay Basdogan, Ph.D. College of Engineering Koc University, Istanbul, 80910 (http://network.ku.edu.tr/~cbasdogan) Resources: EURON Summer School
Motion Control of a Semi-Mobile Haptic Interface for Extended Range Telepresence
 Motion Control of a Semi-Mobile Haptic Interface for Extended Range Telepresence Antonia Pérez Arias and Uwe D. Hanebeck Abstract This paper presents the control concept of a semimobile haptic interface
Motion Control of a Semi-Mobile Haptic Interface for Extended Range Telepresence Antonia Pérez Arias and Uwe D. Hanebeck Abstract This paper presents the control concept of a semimobile haptic interface
A Modular Architecture for an Interactive Real-Time Simulation and Training Environment for Satellite On-Orbit Servicing
 A Modular Architecture for an Interactive Real-Time Simulation and Training Environment for Satellite On-Orbit Servicing Robin Wolff German Aerospace Center (DLR), Germany Slide 1 Outline! Motivation!
A Modular Architecture for an Interactive Real-Time Simulation and Training Environment for Satellite On-Orbit Servicing Robin Wolff German Aerospace Center (DLR), Germany Slide 1 Outline! Motivation!
AURA Soft as a Human Touch
 The Culture of Automation AURA Soft as a Human Touch Designing advanced automation solutions means thinking about the industry in a new way, developing new scenarios, designing innovative products and
The Culture of Automation AURA Soft as a Human Touch Designing advanced automation solutions means thinking about the industry in a new way, developing new scenarios, designing innovative products and
Aural and Haptic Displays
 Teil 5: Aural and Haptic Displays Virtuelle Realität Wintersemester 2007/08 Prof. Bernhard Jung Overview Aural Displays Haptic Displays Further information: The Haptics Community Web Site: http://haptic.mech.northwestern.edu/
Teil 5: Aural and Haptic Displays Virtuelle Realität Wintersemester 2007/08 Prof. Bernhard Jung Overview Aural Displays Haptic Displays Further information: The Haptics Community Web Site: http://haptic.mech.northwestern.edu/
Feeding human senses through Immersion
 Virtual Reality Feeding human senses through Immersion 1. How many human senses? 2. Overview of key human senses 3. Sensory stimulation through Immersion 4. Conclusion Th3.1 1. How many human senses? [TRV
Virtual Reality Feeding human senses through Immersion 1. How many human senses? 2. Overview of key human senses 3. Sensory stimulation through Immersion 4. Conclusion Th3.1 1. How many human senses? [TRV
MEASURING AND ANALYZING FINE MOTOR SKILLS
 MEASURING AND ANALYZING FINE MOTOR SKILLS PART 1: MOTION TRACKING AND EMG OF FINE MOVEMENTS PART 2: HIGH-FIDELITY CAPTURE OF HAND AND FINGER BIOMECHANICS Abstract This white paper discusses an example
MEASURING AND ANALYZING FINE MOTOR SKILLS PART 1: MOTION TRACKING AND EMG OF FINE MOVEMENTS PART 2: HIGH-FIDELITY CAPTURE OF HAND AND FINGER BIOMECHANICS Abstract This white paper discusses an example
Multi-Modal Robot Skins: Proximity Servoing and its Applications
 Multi-Modal Robot Skins: Proximity Servoing and its Applications Workshop See and Touch: 1st Workshop on multimodal sensor-based robot control for HRI and soft manipulation at IROS 2015 Stefan Escaida
Multi-Modal Robot Skins: Proximity Servoing and its Applications Workshop See and Touch: 1st Workshop on multimodal sensor-based robot control for HRI and soft manipulation at IROS 2015 Stefan Escaida
World Automation Congress
 ISORA028 Main Menu World Automation Congress Tenth International Symposium on Robotics with Applications Seville, Spain June 28th-July 1st, 2004 Design And Experiences With DLR Hand II J. Butterfaß, M.
ISORA028 Main Menu World Automation Congress Tenth International Symposium on Robotics with Applications Seville, Spain June 28th-July 1st, 2004 Design And Experiences With DLR Hand II J. Butterfaß, M.