Haptics CS327A
|
|
|
- Darleen Rich
- 5 years ago
- Views:
Transcription
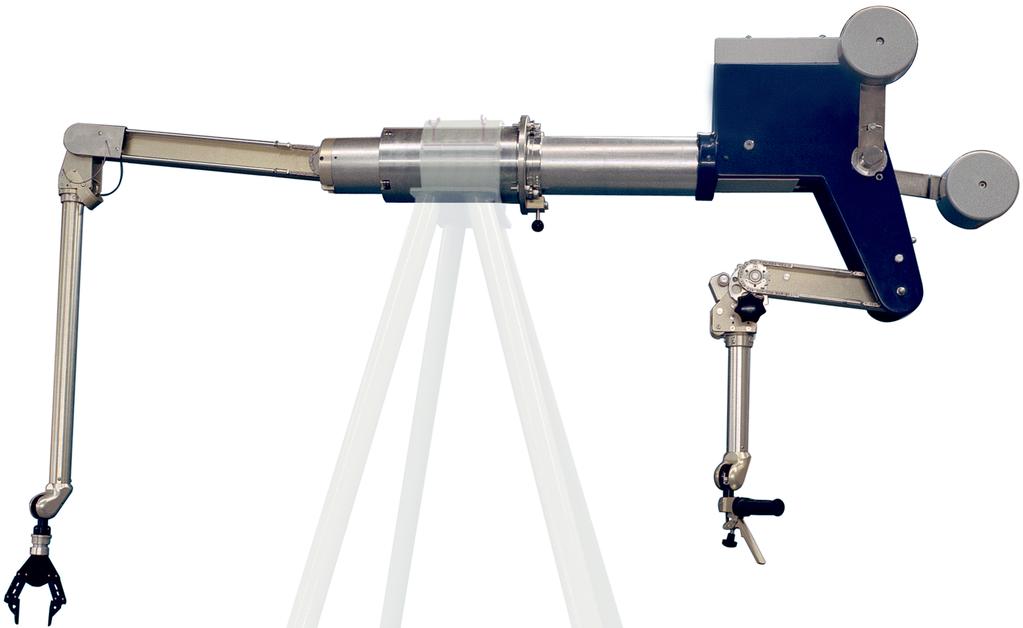
1 Haptics CS327A hap tic adjective relating to the sense of touch or to the perception and manipulation of objects using the senses of touch and proprioception 1 2 Slave Master 3 Courtesy of Walischmiller Engineering 4 Slave Master Slave Master 5 6 Passive gravity compensation


2 Limitations? 7 8 Courtesy of Walischmiller Engineering Teleoperation Electro-mechanical Limitations? Physical distance between operator and device is limited Passive compensation is not perfect Not easy to handle different reference frames for operator and workstation Not easy to scale workspace up or down 9 1 Teleoperation - Teleoperation - Electro-mechanical Electro-mechanical What feedback does the operator need? 11 What feedback does the operator need? Visual, stereo Tactile Audio?, smell? Other task specific information12







3 Teleoperation -Electromechanical Teleoperation -Electromechanical How do we sense each modality of information on remote manipulator? How do we sense each modality of information on remote manipulator? Visual: Visual: stereo cameras, 3D image sensors Tactile: Tactile: force/torque sensors Audio: Audio: microphones Smell: Smell: sensors for specific gases Teleoperation -Electromechanical Teleoperation -Electromechanical How do we display each modality of information on master manipulator? How do we display each modality of information on master manipulator? Visual: Visual: 3D monitors, head mounted displays Tactile: Tactile: force control Audio: Audio: speakers Smell: Smell:??? Haptic devices Generic master manipulators with force feedback Many shapes, sizes and degrees of freedom measured applied Force displayed Force perceived 17 Operator 18





4 19 2 Courtesy of Intuitive Surgical Courtesy of Intuitive Surgical measured applied Force displayed Force perceived Operator Haptic rendering Haptic rendering measured applied Force displayed Force perceived Operator 23 Components? 24



5 Haptic rendering Haptic rendering Components? Components? Simulated remote manipulator dynamics and controller Simulated remote manipulator dynamics and controller Simulated environment dynamics Simulated environment dynamics Interaction model between manipulator and environment Interaction model between manipulator and environment Interaction model representation Interaction model representation Some possibilities: Polygonal meshes Point clouds Voxels Some possibilities: Polygonal meshes Point clouds Voxels Easy to extract geometrical features such as surface normals Determining sensed contact force Determining sensed contact force At each simulation time step: At each simulation time step: Collision detection Extract geometric information resolution aggregation Collision detection Extract geometric information resolution aggregation Simplest case: contact forces are resolved at a discrete number of surface points 29 3




6 Collision detection Single point contact force resolution: virtual proxy model massless proxy object to represent manipulator end effector co-located with haptic tool point in free space motion Bounding sphere hierarchy Single point contact force resolution: virtual proxy model Single point contact force resolution: virtual proxy model massless proxy object to represent manipulator end effector constrained such that no penetration occurs Haptic contact force is computed as impedance from proxy object Single point contact force resolution: haptic shading Multi-point contact force resolution 35 36



7 Contact space Augmented Contact Space (X ) Full set of contact points Non Independent Active Contact Space (X) Subset of contact points Contact mass properties Augmented space inertial coupling Λ 1 1 J A J = T Active Contact Space inertial coupling x1 1 = x4 x 6 S1 1 x1 x2 x 3 x4 x 5 x6 x7 impulse (p) or contact force (f) > Independent but unknown Active Contact Matrix : X = SX 37 Λ = SΛ 1 S 1 J where is the augmented space Jacobian 38 T Contact mass properties Active Contact Space inertial coupling T Λ = SΛ 1 S 1 J where is the augmented space Jacobian s are determined by enforcing non-penetration constraint 39 4 Multi-point contact force resolution: virtual proxy model Haptic contact force is computed as impedance from proxy object 41 42
8 Demo 43
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics
 Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
Computer Assisted Medical Interventions
 Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Interactive Simulation: UCF EIN5255. VR Software. Audio Output. Page 4-1
 VR Software Class 4 Dr. Nabil Rami http://www.simulationfirst.com/ein5255/ Audio Output Can be divided into two elements: Audio Generation Audio Presentation Page 4-1 Audio Generation A variety of audio
VR Software Class 4 Dr. Nabil Rami http://www.simulationfirst.com/ein5255/ Audio Output Can be divided into two elements: Audio Generation Audio Presentation Page 4-1 Audio Generation A variety of audio
TEACHING HAPTIC RENDERING SONNY CHAN, STANFORD UNIVERSITY
 TEACHING HAPTIC RENDERING SONNY CHAN, STANFORD UNIVERSITY MARCH 4, 2012 HAPTICS SYMPOSIUM Overview A brief introduction to CS 277 @ Stanford Core topics in haptic rendering Use of the CHAI3D framework
TEACHING HAPTIC RENDERING SONNY CHAN, STANFORD UNIVERSITY MARCH 4, 2012 HAPTICS SYMPOSIUM Overview A brief introduction to CS 277 @ Stanford Core topics in haptic rendering Use of the CHAI3D framework
Touch Feedback in a Head-Mounted Display Virtual Reality through a Kinesthetic Haptic Device
 Touch Feedback in a Head-Mounted Display Virtual Reality through a Kinesthetic Haptic Device Andrew A. Stanley Stanford University Department of Mechanical Engineering astan@stanford.edu Alice X. Wu Stanford
Touch Feedback in a Head-Mounted Display Virtual Reality through a Kinesthetic Haptic Device Andrew A. Stanley Stanford University Department of Mechanical Engineering astan@stanford.edu Alice X. Wu Stanford
Overview of current developments in haptic APIs
 Central European Seminar on Computer Graphics for students, 2011 AUTHOR: Petr Kadleček SUPERVISOR: Petr Kmoch Overview of current developments in haptic APIs Presentation Haptics Haptic programming Haptic
Central European Seminar on Computer Graphics for students, 2011 AUTHOR: Petr Kadleček SUPERVISOR: Petr Kmoch Overview of current developments in haptic APIs Presentation Haptics Haptic programming Haptic
Methods for Haptic Feedback in Teleoperated Robotic Surgery
 Young Group 5 1 Methods for Haptic Feedback in Teleoperated Robotic Surgery Paper Review Jessie Young Group 5: Haptic Interface for Surgical Manipulator System March 12, 2012 Paper Selection: A. M. Okamura.
Young Group 5 1 Methods for Haptic Feedback in Teleoperated Robotic Surgery Paper Review Jessie Young Group 5: Haptic Interface for Surgical Manipulator System March 12, 2012 Paper Selection: A. M. Okamura.
CS277 - Experimental Haptics Lecture 1. Introduction to Haptics
 CS277 - Experimental Haptics Lecture 1 Introduction to Haptics Haptic Interfaces Enables physical interaction with virtual objects Haptic Rendering Potential Fields Polygonal Meshes Implicit Surfaces Volumetric
CS277 - Experimental Haptics Lecture 1 Introduction to Haptics Haptic Interfaces Enables physical interaction with virtual objects Haptic Rendering Potential Fields Polygonal Meshes Implicit Surfaces Volumetric
Computer Haptics and Applications
 Computer Haptics and Applications EURON Summer School 2003 Cagatay Basdogan, Ph.D. College of Engineering Koc University, Istanbul, 80910 (http://network.ku.edu.tr/~cbasdogan) Resources: EURON Summer School
Computer Haptics and Applications EURON Summer School 2003 Cagatay Basdogan, Ph.D. College of Engineering Koc University, Istanbul, 80910 (http://network.ku.edu.tr/~cbasdogan) Resources: EURON Summer School
Perception. Read: AIMA Chapter 24 & Chapter HW#8 due today. Vision
 11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
CS277 - Experimental Haptics Lecture 2. Haptic Rendering
 CS277 - Experimental Haptics Lecture 2 Haptic Rendering Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering A note on timing...
CS277 - Experimental Haptics Lecture 2 Haptic Rendering Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering A note on timing...
MEAM 520. Haptic Rendering and Teleoperation
 MEAM 520 Haptic Rendering and Teleoperation Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture
MEAM 520 Haptic Rendering and Teleoperation Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture
Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Politecnico di Milano - Dipartimento di Elettronica, Informazione e Bioingegneria Industrial robotics
Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Politecnico di Milano - Dipartimento di Elettronica, Informazione e Bioingegneria Industrial robotics
The Haptic Impendance Control through Virtual Environment Force Compensation
 The Haptic Impendance Control through Virtual Environment Force Compensation OCTAVIAN MELINTE Robotics and Mechatronics Department Institute of Solid Mechanicsof the Romanian Academy ROMANIA octavian.melinte@yahoo.com
The Haptic Impendance Control through Virtual Environment Force Compensation OCTAVIAN MELINTE Robotics and Mechatronics Department Institute of Solid Mechanicsof the Romanian Academy ROMANIA octavian.melinte@yahoo.com
VIRTUAL REALITY Introduction. Emil M. Petriu SITE, University of Ottawa
 VIRTUAL REALITY Introduction Emil M. Petriu SITE, University of Ottawa Natural and Virtual Reality Virtual Reality Interactive Virtual Reality Virtualized Reality Augmented Reality HUMAN PERCEPTION OF
VIRTUAL REALITY Introduction Emil M. Petriu SITE, University of Ottawa Natural and Virtual Reality Virtual Reality Interactive Virtual Reality Virtualized Reality Augmented Reality HUMAN PERCEPTION OF
MEAM 520. Haptic Rendering and Teleoperation
 MEAM 520 Haptic Rendering and Teleoperation Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture
MEAM 520 Haptic Rendering and Teleoperation Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture
Haptic Rendering CPSC / Sonny Chan University of Calgary
 Haptic Rendering CPSC 599.86 / 601.86 Sonny Chan University of Calgary Today s Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering
Haptic Rendering CPSC 599.86 / 601.86 Sonny Chan University of Calgary Today s Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering
Medical Robotics. Part II: SURGICAL ROBOTICS
 5 Medical Robotics Part II: SURGICAL ROBOTICS In the last decade, surgery and robotics have reached a maturity that has allowed them to be safely assimilated to create a new kind of operating room. This
5 Medical Robotics Part II: SURGICAL ROBOTICS In the last decade, surgery and robotics have reached a maturity that has allowed them to be safely assimilated to create a new kind of operating room. This
Networked haptic cooperation using remote dynamic proxies
 29 Second International Conferences on Advances in Computer-Human Interactions Networked haptic cooperation using remote dynamic proxies Zhi Li Department of Mechanical Engineering University of Victoria
29 Second International Conferences on Advances in Computer-Human Interactions Networked haptic cooperation using remote dynamic proxies Zhi Li Department of Mechanical Engineering University of Victoria
Experimental Evaluation of Haptic Control for Human Activated Command Devices
 Experimental Evaluation of Haptic Control for Human Activated Command Devices Andrew Zammit Mangion Simon G. Fabri Faculty of Engineering, University of Malta, Msida, MSD 2080, Malta Tel: +356 (7906)1312;
Experimental Evaluation of Haptic Control for Human Activated Command Devices Andrew Zammit Mangion Simon G. Fabri Faculty of Engineering, University of Malta, Msida, MSD 2080, Malta Tel: +356 (7906)1312;
Information and Program
 Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Lecture 1: Introduction to haptics and Kinesthetic haptic devices
 ME 327: Design and Control of Haptic Systems Winter 2018 Lecture 1: Introduction to haptics and Kinesthetic haptic devices Allison M. Okamura Stanford University today s objectives introduce you to the
ME 327: Design and Control of Haptic Systems Winter 2018 Lecture 1: Introduction to haptics and Kinesthetic haptic devices Allison M. Okamura Stanford University today s objectives introduce you to the
Technologies. Philippe Fuchs Ecole des Mines, ParisTech, Paris, France. Virtual Reality: Concepts and. Guillaume Moreau.
 Virtual Reality: Concepts and Technologies Editors Philippe Fuchs Ecole des Mines, ParisTech, Paris, France Guillaume Moreau Ecole Centrale de Nantes, CERMA, Nantes, France Pascal Guitton INRIA, University
Virtual Reality: Concepts and Technologies Editors Philippe Fuchs Ecole des Mines, ParisTech, Paris, France Guillaume Moreau Ecole Centrale de Nantes, CERMA, Nantes, France Pascal Guitton INRIA, University
Learning the Proprioceptive and Acoustic Properties of Household Objects. Jivko Sinapov Willow Collaborators: Kaijen and Radu 6/24/2010
 Learning the Proprioceptive and Acoustic Properties of Household Objects Jivko Sinapov Willow Collaborators: Kaijen and Radu 6/24/2010 What is Proprioception? It is the sense that indicates whether the
Learning the Proprioceptive and Acoustic Properties of Household Objects Jivko Sinapov Willow Collaborators: Kaijen and Radu 6/24/2010 What is Proprioception? It is the sense that indicates whether the
Haptic Virtual Fixtures for Robot-Assisted Manipulation
 Haptic Virtual Fixtures for Robot-Assisted Manipulation Jake J. Abbott, Panadda Marayong, and Allison M. Okamura Department of Mechanical Engineering, The Johns Hopkins University {jake.abbott, pmarayong,
Haptic Virtual Fixtures for Robot-Assisted Manipulation Jake J. Abbott, Panadda Marayong, and Allison M. Okamura Department of Mechanical Engineering, The Johns Hopkins University {jake.abbott, pmarayong,
Modeling and Experimental Studies of a Novel 6DOF Haptic Device
 Proceedings of The Canadian Society for Mechanical Engineering Forum 2010 CSME FORUM 2010 June 7-9, 2010, Victoria, British Columbia, Canada Modeling and Experimental Studies of a Novel DOF Haptic Device
Proceedings of The Canadian Society for Mechanical Engineering Forum 2010 CSME FORUM 2010 June 7-9, 2010, Victoria, British Columbia, Canada Modeling and Experimental Studies of a Novel DOF Haptic Device
Novel machine interface for scaled telesurgery
 Novel machine interface for scaled telesurgery S. Clanton, D. Wang, Y. Matsuoka, D. Shelton, G. Stetten SPIE Medical Imaging, vol. 5367, pp. 697-704. San Diego, Feb. 2004. A Novel Machine Interface for
Novel machine interface for scaled telesurgery S. Clanton, D. Wang, Y. Matsuoka, D. Shelton, G. Stetten SPIE Medical Imaging, vol. 5367, pp. 697-704. San Diego, Feb. 2004. A Novel Machine Interface for
VR based HCI Techniques & Application. November 29, 2002
 VR based HCI Techniques & Application November 29, 2002 stefan.seipel@hci.uu.se What is Virtual Reality? Coates (1992): Virtual Reality is electronic simulations of environments experienced via head mounted
VR based HCI Techniques & Application November 29, 2002 stefan.seipel@hci.uu.se What is Virtual Reality? Coates (1992): Virtual Reality is electronic simulations of environments experienced via head mounted
On Application of Virtual Fixtures as an Aid for Telemanipulation and Training
 On Application of Virtual Fixtures as an Aid for Telemanipulation and Training Shahram Payandeh and Zoran Stanisic Experimental Robotics Laboratory (ERL) School of Engineering Science Simon Fraser University
On Application of Virtual Fixtures as an Aid for Telemanipulation and Training Shahram Payandeh and Zoran Stanisic Experimental Robotics Laboratory (ERL) School of Engineering Science Simon Fraser University
Haptic interaction. Ruth Aylett
 Haptic interaction Ruth Aylett Contents Haptic definition Haptic model Haptic devices Measuring forces Haptic Technologies Haptics refers to manual interactions with environments, such as sensorial exploration
Haptic interaction Ruth Aylett Contents Haptic definition Haptic model Haptic devices Measuring forces Haptic Technologies Haptics refers to manual interactions with environments, such as sensorial exploration
Passive Bilateral Teleoperation
 Passive Bilateral Teleoperation Project: Reconfigurable Control of Robotic Systems Over Networks Márton Lırinc Dept. Of Electrical Engineering Sapientia University Overview What is bilateral teleoperation?
Passive Bilateral Teleoperation Project: Reconfigurable Control of Robotic Systems Over Networks Márton Lırinc Dept. Of Electrical Engineering Sapientia University Overview What is bilateral teleoperation?
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Intelligent Systems, Control and Automation: Science and Engineering
 Intelligent Systems, Control and Automation: Science and Engineering Volume 64 Series Editor S. G. Tzafestas For further volumes: http://www.springer.com/series/6259 Matjaž Mihelj Janez Podobnik Haptics
Intelligent Systems, Control and Automation: Science and Engineering Volume 64 Series Editor S. G. Tzafestas For further volumes: http://www.springer.com/series/6259 Matjaž Mihelj Janez Podobnik Haptics
Haplug: A Haptic Plug for Dynamic VR Interactions
 Haplug: A Haptic Plug for Dynamic VR Interactions Nobuhisa Hanamitsu *, Ali Israr Disney Research, USA nobuhisa.hanamitsu@disneyresearch.com Abstract. We demonstrate applications of a new actuator, the
Haplug: A Haptic Plug for Dynamic VR Interactions Nobuhisa Hanamitsu *, Ali Israr Disney Research, USA nobuhisa.hanamitsu@disneyresearch.com Abstract. We demonstrate applications of a new actuator, the
¾ B-TECH (IT) ¾ B-TECH (IT)
 ¾ B-TECH (IT)") HAPTIC TECHNOLOGY V.R.Siddhartha Engineering College Vijayawada. Presented by Sudheer Kumar.S CH.Sreekanth ¾ B-TECH (IT) ¾ B-TECH (IT) Email:samudralasudheer@yahoo.com Email:shri_136@yahoo.co.in Introduction
HAPTIC TECHNOLOGY V.R.Siddhartha Engineering College Vijayawada. Presented by Sudheer Kumar.S CH.Sreekanth ¾ B-TECH (IT) ¾ B-TECH (IT) Email:samudralasudheer@yahoo.com Email:shri_136@yahoo.co.in Introduction
Russell and Norvig: an active, artificial agent. continuum of physical configurations and motions
 Chapter 8 Robotics Christian Jacob jacob@cpsc.ucalgary.ca Department of Computer Science University of Calgary 8.5 Robot Institute of America defines a robot as a reprogrammable, multifunction manipulator
Chapter 8 Robotics Christian Jacob jacob@cpsc.ucalgary.ca Department of Computer Science University of Calgary 8.5 Robot Institute of America defines a robot as a reprogrammable, multifunction manipulator
Collaboration en Réalité Virtuelle
 Réalité Virtuelle et Interaction Collaboration en Réalité Virtuelle https://www.lri.fr/~cfleury/teaching/app5-info/rvi-2018/ Année 2017-2018 / APP5 Info à Polytech Paris-Sud Cédric Fleury (cedric.fleury@lri.fr)
Réalité Virtuelle et Interaction Collaboration en Réalité Virtuelle https://www.lri.fr/~cfleury/teaching/app5-info/rvi-2018/ Année 2017-2018 / APP5 Info à Polytech Paris-Sud Cédric Fleury (cedric.fleury@lri.fr)
Haptic interaction. Ruth Aylett
 Haptic interaction Ruth Aylett Contents Haptic definition Haptic model Haptic devices Measuring forces Haptic Technologies Haptics refers to manual interactions with environments, such as sensorial exploration
Haptic interaction Ruth Aylett Contents Haptic definition Haptic model Haptic devices Measuring forces Haptic Technologies Haptics refers to manual interactions with environments, such as sensorial exploration
Introduction to Haptics
 Introduction to Haptics Roope Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction (TAUCHI) Department of Computer Sciences University of Tampere, Finland Definition
Introduction to Haptics Roope Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction (TAUCHI) Department of Computer Sciences University of Tampere, Finland Definition
HAPTIC DEVICES FOR DESKTOP VIRTUAL PROTOTYPING APPLICATIONS
 The 3rd International Conference on Computational Mechanics and Virtual Engineering COMEC 2009 29 30 OCTOBER 2009, Brasov, Romania HAPTIC DEVICES FOR DESKTOP VIRTUAL PROTOTYPING APPLICATIONS A. Fratu 1,
The 3rd International Conference on Computational Mechanics and Virtual Engineering COMEC 2009 29 30 OCTOBER 2009, Brasov, Romania HAPTIC DEVICES FOR DESKTOP VIRTUAL PROTOTYPING APPLICATIONS A. Fratu 1,
A Feasibility Study of Time-Domain Passivity Approach for Bilateral Teleoperation of Mobile Manipulator
 International Conference on Control, Automation and Systems 2008 Oct. 14-17, 2008 in COEX, Seoul, Korea A Feasibility Study of Time-Domain Passivity Approach for Bilateral Teleoperation of Mobile Manipulator
International Conference on Control, Automation and Systems 2008 Oct. 14-17, 2008 in COEX, Seoul, Korea A Feasibility Study of Time-Domain Passivity Approach for Bilateral Teleoperation of Mobile Manipulator
Interacting within Virtual Worlds (based on talks by Greg Welch and Mark Mine)
") Interacting within Virtual Worlds (based on talks by Greg Welch and Mark Mine) Presentation Working in a virtual world Interaction principles Interaction examples Why VR in the First Place? Direct perception
Interacting within Virtual Worlds (based on talks by Greg Welch and Mark Mine) Presentation Working in a virtual world Interaction principles Interaction examples Why VR in the First Place? Direct perception
FORCE FEEDBACK. Roope Raisamo
 FORCE FEEDBACK Roope Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere, Finland Outline Force feedback interfaces
FORCE FEEDBACK Roope Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere, Finland Outline Force feedback interfaces
Using Real Objects for Interaction Tasks in Immersive Virtual Environments
 Using Objects for Interaction Tasks in Immersive Virtual Environments Andy Boud, Dr. VR Solutions Pty. Ltd. andyb@vrsolutions.com.au Abstract. The use of immersive virtual environments for industrial applications
Using Objects for Interaction Tasks in Immersive Virtual Environments Andy Boud, Dr. VR Solutions Pty. Ltd. andyb@vrsolutions.com.au Abstract. The use of immersive virtual environments for industrial applications
MECHANICAL DESIGN LEARNING ENVIRONMENTS BASED ON VIRTUAL REALITY TECHNOLOGIES
 INTERNATIONAL CONFERENCE ON ENGINEERING AND PRODUCT DESIGN EDUCATION 4 & 5 SEPTEMBER 2008, UNIVERSITAT POLITECNICA DE CATALUNYA, BARCELONA, SPAIN MECHANICAL DESIGN LEARNING ENVIRONMENTS BASED ON VIRTUAL
INTERNATIONAL CONFERENCE ON ENGINEERING AND PRODUCT DESIGN EDUCATION 4 & 5 SEPTEMBER 2008, UNIVERSITAT POLITECNICA DE CATALUNYA, BARCELONA, SPAIN MECHANICAL DESIGN LEARNING ENVIRONMENTS BASED ON VIRTUAL
2. Introduction to Computer Haptics
 2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
PROPRIOCEPTION AND FORCE FEEDBACK
 PROPRIOCEPTION AND FORCE FEEDBACK Roope Raisamo and Jukka Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere,
PROPRIOCEPTION AND FORCE FEEDBACK Roope Raisamo and Jukka Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere,
Performance Evaluation of Augmented Teleoperation of Contact Manipulation Tasks
 STUDENT SUMMER INTERNSHIP TECHNICAL REPORT Performance Evaluation of Augmented Teleoperation of Contact Manipulation Tasks DOE-FIU SCIENCE & TECHNOLOGY WORKFORCE DEVELOPMENT PROGRAM Date submitted: September
STUDENT SUMMER INTERNSHIP TECHNICAL REPORT Performance Evaluation of Augmented Teleoperation of Contact Manipulation Tasks DOE-FIU SCIENCE & TECHNOLOGY WORKFORCE DEVELOPMENT PROGRAM Date submitted: September
Force Feedback in Virtual Assembly Scenarios: A Human Factors Evaluation
 Force Feedback in Virtual Assembly Scenarios: A Human Factors Evaluation Bernhard Weber German Aerospace Center Institute of Robotics and Mechatronics DLR.de Chart 2 Content Motivation Virtual Environment
Force Feedback in Virtual Assembly Scenarios: A Human Factors Evaluation Bernhard Weber German Aerospace Center Institute of Robotics and Mechatronics DLR.de Chart 2 Content Motivation Virtual Environment
Sensors & Systems for Human Safety Assurance in Collaborative Exploration
 Sensing and Sensors CMU SCS RI 16-722 S09 Ned Fox nfox@andrew.cmu.edu Outline What is collaborative exploration? Humans sensing robots Robots sensing humans Overseers sensing both Inherently safe systems
Sensing and Sensors CMU SCS RI 16-722 S09 Ned Fox nfox@andrew.cmu.edu Outline What is collaborative exploration? Humans sensing robots Robots sensing humans Overseers sensing both Inherently safe systems
Università di Roma La Sapienza. Medical Robotics. A Teleoperation System for Research in MIRS. Marilena Vendittelli
 Università di Roma La Sapienza Medical Robotics A Teleoperation System for Research in MIRS Marilena Vendittelli the DLR teleoperation system slave three versatile robots MIRO light-weight: weight < 10
Università di Roma La Sapienza Medical Robotics A Teleoperation System for Research in MIRS Marilena Vendittelli the DLR teleoperation system slave three versatile robots MIRO light-weight: weight < 10
Mobile Manipulation in der Telerobotik
 Mobile Manipulation in der Telerobotik Angelika Peer, Thomas Schauß, Ulrich Unterhinninghofen, Martin Buss angelika.peer@tum.de schauss@tum.de ulrich.unterhinninghofen@tum.de mb@tum.de Lehrstuhl für Steuerungs-
Mobile Manipulation in der Telerobotik Angelika Peer, Thomas Schauß, Ulrich Unterhinninghofen, Martin Buss angelika.peer@tum.de schauss@tum.de ulrich.unterhinninghofen@tum.de mb@tum.de Lehrstuhl für Steuerungs-
A Movement Based Method for Haptic Interaction
 Spring 2014 Haptics Class Project Paper presented at the University of South Florida, April 30, 2014 A Movement Based Method for Haptic Interaction Matthew Clevenger Abstract An abundance of haptic rendering
Spring 2014 Haptics Class Project Paper presented at the University of South Florida, April 30, 2014 A Movement Based Method for Haptic Interaction Matthew Clevenger Abstract An abundance of haptic rendering
Elements of Haptic Interfaces
 Elements of Haptic Interfaces Katherine J. Kuchenbecker Department of Mechanical Engineering and Applied Mechanics University of Pennsylvania kuchenbe@seas.upenn.edu Course Notes for MEAM 625, University
Elements of Haptic Interfaces Katherine J. Kuchenbecker Department of Mechanical Engineering and Applied Mechanics University of Pennsylvania kuchenbe@seas.upenn.edu Course Notes for MEAM 625, University
Sensing self motion. Key points: Why robots need self-sensing Sensors for proprioception in biological systems in robot systems
 Sensing self motion Key points: Why robots need self-sensing Sensors for proprioception in biological systems in robot systems Position sensing Velocity and acceleration sensing Force sensing Vision based
Sensing self motion Key points: Why robots need self-sensing Sensors for proprioception in biological systems in robot systems Position sensing Velocity and acceleration sensing Force sensing Vision based
Haptic presentation of 3D objects in virtual reality for the visually disabled
 Haptic presentation of 3D objects in virtual reality for the visually disabled M Moranski, A Materka Institute of Electronics, Technical University of Lodz, Wolczanska 211/215, Lodz, POLAND marcin.moranski@p.lodz.pl,
Haptic presentation of 3D objects in virtual reality for the visually disabled M Moranski, A Materka Institute of Electronics, Technical University of Lodz, Wolczanska 211/215, Lodz, POLAND marcin.moranski@p.lodz.pl,
A Hybrid Actuation Approach for Haptic Devices
 A Hybrid Actuation Approach for Haptic Devices François Conti conti@ai.stanford.edu Oussama Khatib ok@ai.stanford.edu Charles Baur charles.baur@epfl.ch Robotics Laboratory Computer Science Department Stanford
A Hybrid Actuation Approach for Haptic Devices François Conti conti@ai.stanford.edu Oussama Khatib ok@ai.stanford.edu Charles Baur charles.baur@epfl.ch Robotics Laboratory Computer Science Department Stanford
Abstract. Introduction. Threee Enabling Observations
 The PHANTOM Haptic Interface: A Device for Probing Virtual Objects Thomas H. Massie and J. K. Salisbury. Proceedings of the ASME Winter Annual Meeting, Symposium on Haptic Interfaces for Virtual Environment
The PHANTOM Haptic Interface: A Device for Probing Virtual Objects Thomas H. Massie and J. K. Salisbury. Proceedings of the ASME Winter Annual Meeting, Symposium on Haptic Interfaces for Virtual Environment
The Application of Virtual Reality Technology to Digital Tourism Systems
 The Application of Virtual Reality Technology to Digital Tourism Systems PAN Li-xin 1, a 1 Geographic Information and Tourism College Chuzhou University, Chuzhou 239000, China a czplx@sina.com Abstract
The Application of Virtual Reality Technology to Digital Tourism Systems PAN Li-xin 1, a 1 Geographic Information and Tourism College Chuzhou University, Chuzhou 239000, China a czplx@sina.com Abstract
Robust Haptic Teleoperation of a Mobile Manipulation Platform
 Robust Haptic Teleoperation of a Mobile Manipulation Platform Jaeheung Park and Oussama Khatib Stanford AI Laboratory Stanford University http://robotics.stanford.edu Abstract. This paper presents a new
Robust Haptic Teleoperation of a Mobile Manipulation Platform Jaeheung Park and Oussama Khatib Stanford AI Laboratory Stanford University http://robotics.stanford.edu Abstract. This paper presents a new
FUNDAMENTALS ROBOT TECHNOLOGY. An Introduction to Industrial Robots, T eleoperators and Robot Vehicles. D J Todd. Kogan Page
 FUNDAMENTALS of ROBOT TECHNOLOGY An Introduction to Industrial Robots, T eleoperators and Robot Vehicles D J Todd &\ Kogan Page First published in 1986 by Kogan Page Ltd 120 Pentonville Road, London Nl
FUNDAMENTALS of ROBOT TECHNOLOGY An Introduction to Industrial Robots, T eleoperators and Robot Vehicles D J Todd &\ Kogan Page First published in 1986 by Kogan Page Ltd 120 Pentonville Road, London Nl
Point Cloud-based Model-mediated Teleoperation with Dynamic and Perception-based Model Updating
 Preliminary version for evaluation: Please do not circulate without the permission of the author(s) Point Cloud-based Model-mediated Teleoperation with Dynamic and Perception-based Model Updating Xiao
Preliminary version for evaluation: Please do not circulate without the permission of the author(s) Point Cloud-based Model-mediated Teleoperation with Dynamic and Perception-based Model Updating Xiao
Friction & Workspaces
 Friction & Workspaces CPSC 599.86 / 601.86 Sonny Chan University of Calgary Today s Agenda Rendering surfaces with friction Exploring large virtual environments using devices with limited workspace [From
Friction & Workspaces CPSC 599.86 / 601.86 Sonny Chan University of Calgary Today s Agenda Rendering surfaces with friction Exploring large virtual environments using devices with limited workspace [From
- applications on same or different network node of the workstation - portability of application software - multiple displays - open architecture
 12 Window Systems - A window system manages a computer screen. - Divides the screen into overlapping regions. - Each region displays output from a particular application. X window system is widely used
12 Window Systems - A window system manages a computer screen. - Divides the screen into overlapping regions. - Each region displays output from a particular application. X window system is widely used
Abstract. 1. Introduction
 GRAPHICAL AND HAPTIC INTERACTION WITH LARGE 3D COMPRESSED OBJECTS Krasimir Kolarov Interval Research Corp., 1801-C Page Mill Road, Palo Alto, CA 94304 Kolarov@interval.com Abstract The use of force feedback
GRAPHICAL AND HAPTIC INTERACTION WITH LARGE 3D COMPRESSED OBJECTS Krasimir Kolarov Interval Research Corp., 1801-C Page Mill Road, Palo Alto, CA 94304 Kolarov@interval.com Abstract The use of force feedback
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
Enhanced performance of delayed teleoperator systems operating within nondeterministic environments
 University of Wollongong Research Online University of Wollongong Thesis Collection 1954-2016 University of Wollongong Thesis Collections 2010 Enhanced performance of delayed teleoperator systems operating
University of Wollongong Research Online University of Wollongong Thesis Collection 1954-2016 University of Wollongong Thesis Collections 2010 Enhanced performance of delayed teleoperator systems operating
CSE 165: 3D User Interaction. Lecture #14: 3D UI Design
 CSE 165: 3D User Interaction Lecture #14: 3D UI Design 2 Announcements Homework 3 due tomorrow 2pm Monday: midterm discussion Next Thursday: midterm exam 3D UI Design Strategies 3 4 Thus far 3DUI hardware
CSE 165: 3D User Interaction Lecture #14: 3D UI Design 2 Announcements Homework 3 due tomorrow 2pm Monday: midterm discussion Next Thursday: midterm exam 3D UI Design Strategies 3 4 Thus far 3DUI hardware
Output Devices - Non-Visual
 IMGD 5100: Immersive HCI Output Devices - Non-Visual Robert W. Lindeman Associate Professor Department of Computer Science Worcester Polytechnic Institute gogo@wpi.edu Overview Here we are concerned with
IMGD 5100: Immersive HCI Output Devices - Non-Visual Robert W. Lindeman Associate Professor Department of Computer Science Worcester Polytechnic Institute gogo@wpi.edu Overview Here we are concerned with
Assembly Set. capabilities for assembly, design, and evaluation
 Assembly Set capabilities for assembly, design, and evaluation I-DEAS Master Assembly I-DEAS Master Assembly software allows you to work in a multi-user environment to lay out, design, and manage large
Assembly Set capabilities for assembly, design, and evaluation I-DEAS Master Assembly I-DEAS Master Assembly software allows you to work in a multi-user environment to lay out, design, and manage large
Applying Model Mediation Method to a Mobile Robot Bilateral Teleoperation System Experiencing Time Delays in Communication
 Applying Model Mediation Method to a Mobile Robot Bilateral Teleoperation System Experiencing Time Delays in Communication B. Taner * M. İ. C. Dede E. Uzunoğlu İzmir Institute of Technology İzmir Institute
Applying Model Mediation Method to a Mobile Robot Bilateral Teleoperation System Experiencing Time Delays in Communication B. Taner * M. İ. C. Dede E. Uzunoğlu İzmir Institute of Technology İzmir Institute
Development of K-Touch TM Haptic API for Various Datasets
 Development of K-Touch TM Haptic API for Various Datasets Beom-Chan Lee 1 Jong-Phil Kim 2 Jongeun Cha 3 Jeha Ryu 4 ABSTRACT This paper presents development of a new haptic API (Application Programming
Development of K-Touch TM Haptic API for Various Datasets Beom-Chan Lee 1 Jong-Phil Kim 2 Jongeun Cha 3 Jeha Ryu 4 ABSTRACT This paper presents development of a new haptic API (Application Programming
Integrating PhysX and OpenHaptics: Efficient Force Feedback Generation Using Physics Engine and Haptic Devices
 This is the Pre-Published Version. Integrating PhysX and Opens: Efficient Force Feedback Generation Using Physics Engine and Devices 1 Leon Sze-Ho Chan 1, Kup-Sze Choi 1 School of Nursing, Hong Kong Polytechnic
This is the Pre-Published Version. Integrating PhysX and Opens: Efficient Force Feedback Generation Using Physics Engine and Devices 1 Leon Sze-Ho Chan 1, Kup-Sze Choi 1 School of Nursing, Hong Kong Polytechnic
VR Haptic Interfaces for Teleoperation : an Evaluation Study
 VR Haptic Interfaces for Teleoperation : an Evaluation Study Renaud Ott, Mario Gutiérrez, Daniel Thalmann, Frédéric Vexo Virtual Reality Laboratory Ecole Polytechnique Fédérale de Lausanne (EPFL) CH-1015
VR Haptic Interfaces for Teleoperation : an Evaluation Study Renaud Ott, Mario Gutiérrez, Daniel Thalmann, Frédéric Vexo Virtual Reality Laboratory Ecole Polytechnique Fédérale de Lausanne (EPFL) CH-1015
What is Virtual Reality? Burdea,1993. Virtual Reality Triangle Triangle I 3 I 3. Virtual Reality in Product Development. Virtual Reality Technology
 Virtual Reality man made reality sense world What is Virtual Reality? Dipl-Ing Indra Kusumah Digital Product Design Fraunhofer IPT Steinbachstrasse 17 D-52074 Aachen Indrakusumah@iptfraunhoferde wwwiptfraunhoferde
Virtual Reality man made reality sense world What is Virtual Reality? Dipl-Ing Indra Kusumah Digital Product Design Fraunhofer IPT Steinbachstrasse 17 D-52074 Aachen Indrakusumah@iptfraunhoferde wwwiptfraunhoferde
Summary of robot visual servo system
 Abstract Summary of robot visual servo system Xu Liu, Lingwen Tang School of Mechanical engineering, Southwest Petroleum University, Chengdu 610000, China In this paper, the survey of robot visual servoing
Abstract Summary of robot visual servo system Xu Liu, Lingwen Tang School of Mechanical engineering, Southwest Petroleum University, Chengdu 610000, China In this paper, the survey of robot visual servoing
Booklet of teaching units
 International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
Los Alamos. DOE Office of Scientific and Technical Information LA-U R-9&%
 LA-U R-9&% Title: Author(s): Submitted M: Virtual Reality and Telepresence Control of Robots Used in Hazardous Environments Lawrence E. Bronisz, ESA-MT Pete C. Pittman, ESA-MT DOE Office of Scientific
LA-U R-9&% Title: Author(s): Submitted M: Virtual Reality and Telepresence Control of Robots Used in Hazardous Environments Lawrence E. Bronisz, ESA-MT Pete C. Pittman, ESA-MT DOE Office of Scientific
Lecture 9: Teleoperation
 ME 327: Design and Control of Haptic Systems Autumn 2018 Lecture 9: Teleoperation Allison M. Okamura Stanford University teleoperation history and examples the genesis of teleoperation? a Polygraph is
ME 327: Design and Control of Haptic Systems Autumn 2018 Lecture 9: Teleoperation Allison M. Okamura Stanford University teleoperation history and examples the genesis of teleoperation? a Polygraph is
Tele-operation of a Robot Arm with Electro Tactile Feedback
 F Tele-operation of a Robot Arm with Electro Tactile Feedback Daniel S. Pamungkas and Koren Ward * Abstract Tactile feedback from a remotely controlled robotic arm can facilitate certain tasks by enabling
F Tele-operation of a Robot Arm with Electro Tactile Feedback Daniel S. Pamungkas and Koren Ward * Abstract Tactile feedback from a remotely controlled robotic arm can facilitate certain tasks by enabling
Haptic Battle Pong: High-Degree-of-Freedom Haptics in a Multiplayer Gaming Environment
 Haptic Battle Pong: High-Degree-of-Freedom Haptics in a Multiplayer Gaming Environment Dan Morris Stanford University dmorris@cs.stanford.edu Neel Joshi Univ of California, San Diego njoshi@cs.ucsd.edu
Haptic Battle Pong: High-Degree-of-Freedom Haptics in a Multiplayer Gaming Environment Dan Morris Stanford University dmorris@cs.stanford.edu Neel Joshi Univ of California, San Diego njoshi@cs.ucsd.edu
2B34 DEVELOPMENT OF A HYDRAULIC PARALLEL LINK TYPE OF FORCE DISPLAY
 2B34 DEVELOPMENT OF A HYDRAULIC PARALLEL LINK TYPE OF FORCE DISPLAY -Improvement of Manipulability Using Disturbance Observer and its Application to a Master-slave System- Shigeki KUDOMI*, Hironao YAMADA**
2B34 DEVELOPMENT OF A HYDRAULIC PARALLEL LINK TYPE OF FORCE DISPLAY -Improvement of Manipulability Using Disturbance Observer and its Application to a Master-slave System- Shigeki KUDOMI*, Hironao YAMADA**
Haptic Sensing and Perception for Telerobotic Manipulation
 Haptic Sensing and Perception for Telerobotic Manipulation Emil M. Petriu, Dr. Eng., P.Eng., FIEEE Professor School of Information Technology and Engineering University of Ottawa Ottawa, ON., K1N 6N5 Canada
Haptic Sensing and Perception for Telerobotic Manipulation Emil M. Petriu, Dr. Eng., P.Eng., FIEEE Professor School of Information Technology and Engineering University of Ottawa Ottawa, ON., K1N 6N5 Canada
Comparing Two Haptic Interfaces for Multimodal Graph Rendering
 Comparing Two Haptic Interfaces for Multimodal Graph Rendering Wai Yu, Stephen Brewster Glasgow Interactive Systems Group, Department of Computing Science, University of Glasgow, U. K. {rayu, stephen}@dcs.gla.ac.uk,
Comparing Two Haptic Interfaces for Multimodal Graph Rendering Wai Yu, Stephen Brewster Glasgow Interactive Systems Group, Department of Computing Science, University of Glasgow, U. K. {rayu, stephen}@dcs.gla.ac.uk,
- Modifying the histogram by changing the frequency of occurrence of each gray scale value may improve the image quality and enhance the contrast.
 11. Image Processing Image processing concerns about modifying or transforming images. Applications may include enhancing an image or adding special effects to an image. Here we will learn some of the
11. Image Processing Image processing concerns about modifying or transforming images. Applications may include enhancing an image or adding special effects to an image. Here we will learn some of the
Cutaneous Force Feedback as a Sensory Subtraction Technique in Haptics
 IEEE TRANSACTIONS ON HAPTICS, VOL. 5, NO. 4, OCTOBER-DECEMBER 2012 289 Cutaneous Force Feedback as a Sensory Subtraction Technique in Haptics Domenico Prattichizzo, Member, IEEE, Claudio Pacchierotti,
IEEE TRANSACTIONS ON HAPTICS, VOL. 5, NO. 4, OCTOBER-DECEMBER 2012 289 Cutaneous Force Feedback as a Sensory Subtraction Technique in Haptics Domenico Prattichizzo, Member, IEEE, Claudio Pacchierotti,
Steady-Hand Teleoperation with Virtual Fixtures
 Steady-Hand Teleoperation with Virtual Fixtures Jake J. Abbott 1, Gregory D. Hager 2, and Allison M. Okamura 1 1 Department of Mechanical Engineering 2 Department of Computer Science The Johns Hopkins
Steady-Hand Teleoperation with Virtual Fixtures Jake J. Abbott 1, Gregory D. Hager 2, and Allison M. Okamura 1 1 Department of Mechanical Engineering 2 Department of Computer Science The Johns Hopkins
VisHap: Augmented Reality Combining Haptics and Vision
 VisHap: Augmented Reality Combining Haptics and Vision Guangqi Ye 1, Jason J. Corso 1, Gregory D. Hager 1, Allison M. Okamura 1,2 Departments of 1 Computer Science and 2 Mechanical Engineering The Johns
VisHap: Augmented Reality Combining Haptics and Vision Guangqi Ye 1, Jason J. Corso 1, Gregory D. Hager 1, Allison M. Okamura 1,2 Departments of 1 Computer Science and 2 Mechanical Engineering The Johns
Virtual Chromatic Percussions Simulated by Pseudo-Haptic and Vibrotactile Feedback
 Virtual Chromatic Percussions Simulated by Pseudo-Haptic and Vibrotactile Feedback Taku Hachisu The University of Electro- Communications 1-5-1 Chofugaoka, Chofu, Tokyo 182-8585, Japan +81 42 443 5363
Virtual Chromatic Percussions Simulated by Pseudo-Haptic and Vibrotactile Feedback Taku Hachisu The University of Electro- Communications 1-5-1 Chofugaoka, Chofu, Tokyo 182-8585, Japan +81 42 443 5363
Design of Cylindrical Whole-hand Haptic Interface using Electrocutaneous Display
 Design of Cylindrical Whole-hand Haptic Interface using Electrocutaneous Display Hiroyuki Kajimoto 1,2 1 The University of Electro-Communications 1-5-1 Chofugaoka, Chofu, Tokyo 182-8585 Japan 2 Japan Science
Design of Cylindrical Whole-hand Haptic Interface using Electrocutaneous Display Hiroyuki Kajimoto 1,2 1 The University of Electro-Communications 1-5-1 Chofugaoka, Chofu, Tokyo 182-8585 Japan 2 Japan Science
Haptic Rendering: Introductory Concepts
 Haptic Rendering: Introductory Concepts Kenneth Salisbury, Federico Barbagli, Francois Conti Stanford Robotics Lab - Stanford University - Stanford, CA, U.S.A. Dipartimento di Inegneria dell Informazione
Haptic Rendering: Introductory Concepts Kenneth Salisbury, Federico Barbagli, Francois Conti Stanford Robotics Lab - Stanford University - Stanford, CA, U.S.A. Dipartimento di Inegneria dell Informazione
Visuo-Haptic Interface for Teleoperation of Mobile Robot Exploration Tasks
 Visuo-Haptic Interface for Teleoperation of Mobile Robot Exploration Tasks Nikos C. Mitsou, Spyros V. Velanas and Costas S. Tzafestas Abstract With the spread of low-cost haptic devices, haptic interfaces
Visuo-Haptic Interface for Teleoperation of Mobile Robot Exploration Tasks Nikos C. Mitsou, Spyros V. Velanas and Costas S. Tzafestas Abstract With the spread of low-cost haptic devices, haptic interfaces
HeroX - Untethered VR Training in Sync'ed Physical Spaces
 Page 1 of 6 HeroX - Untethered VR Training in Sync'ed Physical Spaces Above and Beyond - Integrating Robotics In previous research work I experimented with multiple robots remotely controlled by people
Page 1 of 6 HeroX - Untethered VR Training in Sync'ed Physical Spaces Above and Beyond - Integrating Robotics In previous research work I experimented with multiple robots remotely controlled by people
Constraint-Based Haptic Rendering of Point Data for Teleoperated Robot Grasping
 Constraint-Based Haptic Rendering of Point Data for Teleoperated Robot Grasping Adam Leeper Department of Mechanical Engineering Stanford University Sonny Chan Department of Computer Science Stanford University
Constraint-Based Haptic Rendering of Point Data for Teleoperated Robot Grasping Adam Leeper Department of Mechanical Engineering Stanford University Sonny Chan Department of Computer Science Stanford University
Haptic Technology- Comprehensive Review Study with its Applications
 Haptic Technology- Comprehensive Review Study with its Applications Tanya Jaiswal 1, Rambha Yadav 2, Pooja Kedia 3 1,2 Student, Department of Computer Science and Engineering, Buddha Institute of Technology,
Haptic Technology- Comprehensive Review Study with its Applications Tanya Jaiswal 1, Rambha Yadav 2, Pooja Kedia 3 1,2 Student, Department of Computer Science and Engineering, Buddha Institute of Technology,
Benefits of using haptic devices in textile architecture
 28 September 2 October 2009, Universidad Politecnica de Valencia, Spain Alberto DOMINGO and Carlos LAZARO (eds.) Benefits of using haptic devices in textile architecture Javier SANCHEZ *, Joan SAVALL a
28 September 2 October 2009, Universidad Politecnica de Valencia, Spain Alberto DOMINGO and Carlos LAZARO (eds.) Benefits of using haptic devices in textile architecture Javier SANCHEZ *, Joan SAVALL a
Reproduction of Human Manipulation Skills in a Robot
 University of Wollongong Research Online Faculty of Engineering - Papers (Archive) Faculty of Engineering and Information Sciences 2005 Reproduction of Human Manipulation Skills in a Robot Shen Dong University
University of Wollongong Research Online Faculty of Engineering - Papers (Archive) Faculty of Engineering and Information Sciences 2005 Reproduction of Human Manipulation Skills in a Robot Shen Dong University
Multi-Modal Robot Skins: Proximity Servoing and its Applications
 Multi-Modal Robot Skins: Proximity Servoing and its Applications Workshop See and Touch: 1st Workshop on multimodal sensor-based robot control for HRI and soft manipulation at IROS 2015 Stefan Escaida
Multi-Modal Robot Skins: Proximity Servoing and its Applications Workshop See and Touch: 1st Workshop on multimodal sensor-based robot control for HRI and soft manipulation at IROS 2015 Stefan Escaida
Beyond Visual: Shape, Haptics and Actuation in 3D UI
 Beyond Visual: Shape, Haptics and Actuation in 3D UI Ivan Poupyrev Welcome, Introduction, & Roadmap 3D UIs 101 3D UIs 201 User Studies and 3D UIs Guidelines for Developing 3D UIs Video Games: 3D UIs for
Beyond Visual: Shape, Haptics and Actuation in 3D UI Ivan Poupyrev Welcome, Introduction, & Roadmap 3D UIs 101 3D UIs 201 User Studies and 3D UIs Guidelines for Developing 3D UIs Video Games: 3D UIs for
Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue
Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue