MEAM 520. Haptic Rendering and Teleoperation
|
|
|
- Eleanor Baker
- 5 years ago
- Views:
Transcription



1 MEAM 520 Haptic Rendering and Teleoperation Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture 17: November 15, 2012
2

3
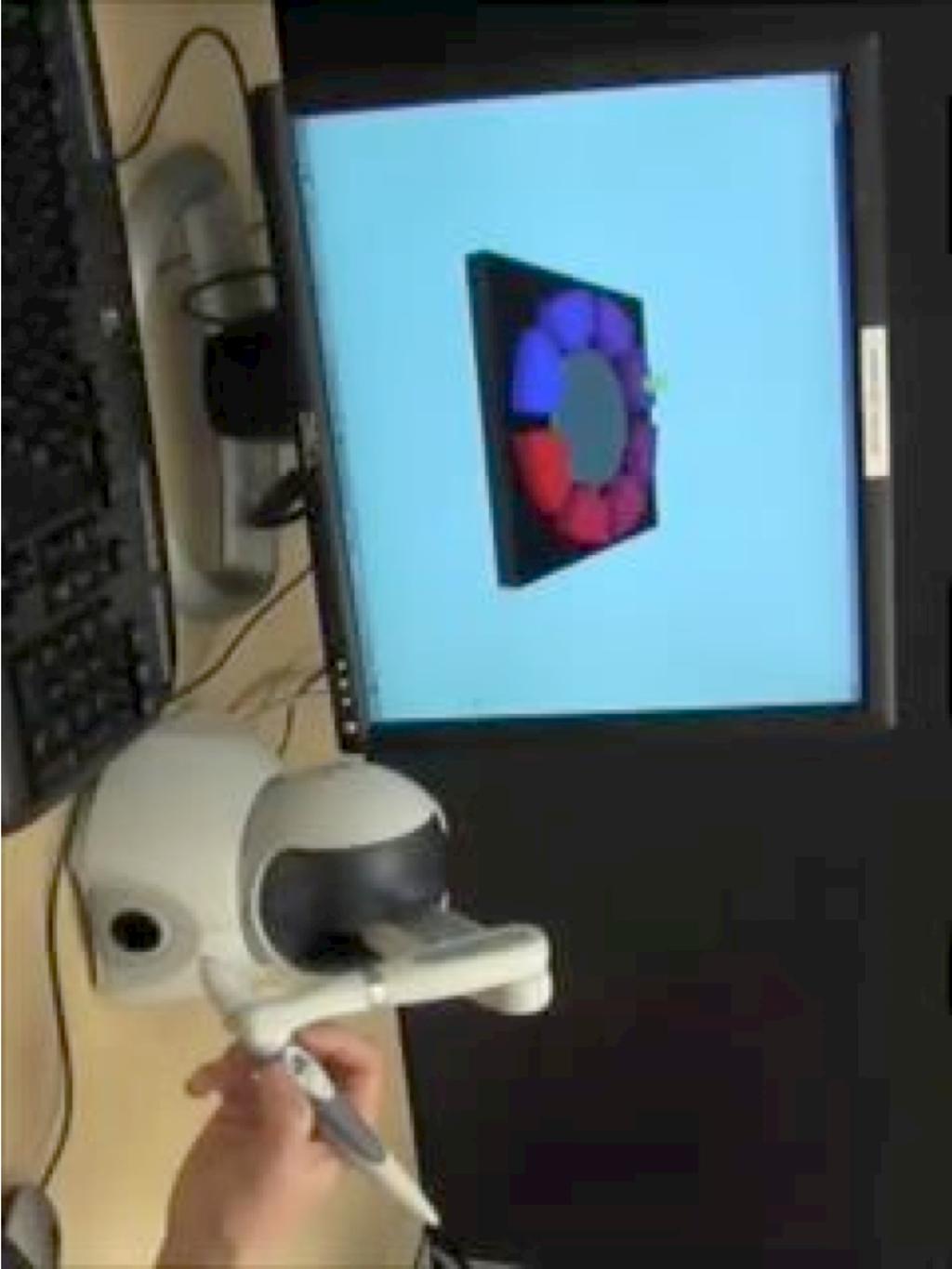
4 Haptic Rendering
5 How do you program a one-d virtual wall? 0 x u x x w
6 x h x h x s θ û n y x s x test ( x h x s ) û n = x h x s û n cos θ = d
7 x h x h x s θ û n y x s Calculate proxy position x
8 û n y x s x h x s x h Calculate proxy position x else x p = x h dû n + r p û n else F = k s (d r p )û n Limited to about 2 N/mm
9
10 Why would you want to make a wall feel harder? How could you make a wall feel harder? Buy a better haptic interface. Perhaps try nonlinear stiffness. Add damping perpendicular to the plane, but only on the way in. Add an event-based force transient perpendicular to the plane for a short time after contact. The magnitude of the transient should scale with the magnitude of the perpendicular velocity.
11 A sample custom haptic device
12 Knob Force/Torque Sensor Motor with Gearhead and Digitial Encoder







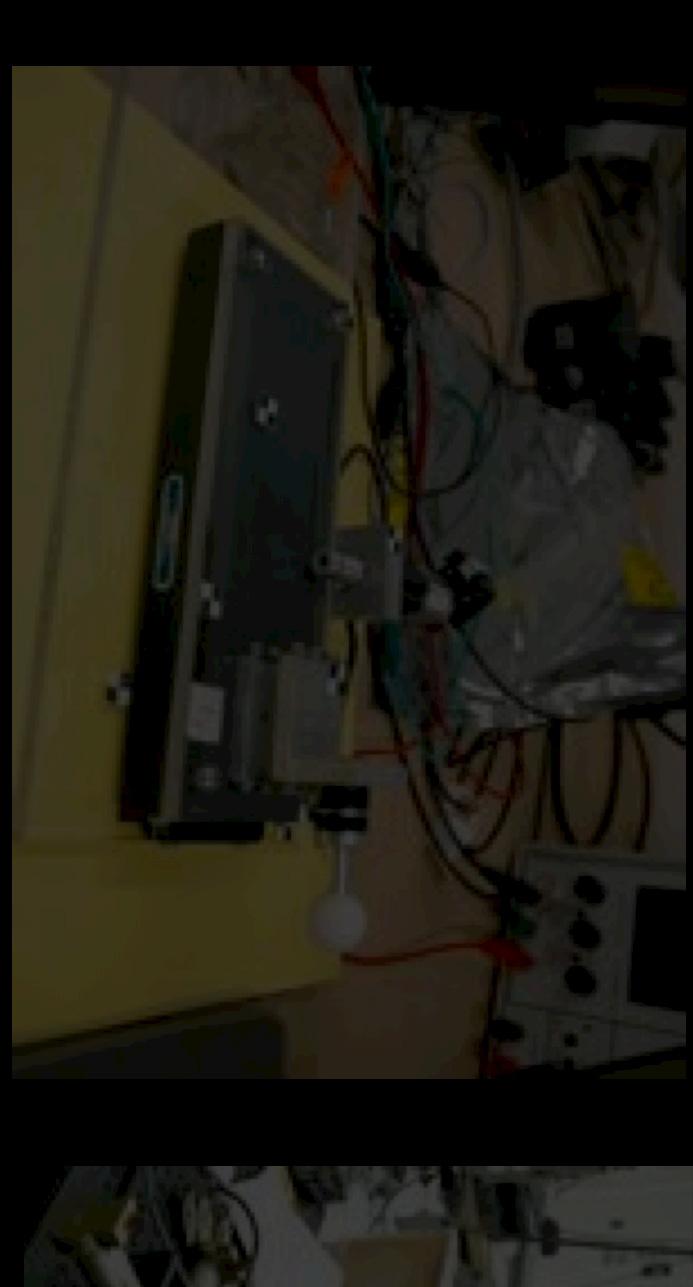

13 Knob Force/Torque Sensor Motor with Gearhead and Digitial Encoder


14

15
16
17 Motor Position (deg) Time (s)
18 Time (s) Motor Position (deg)
19 Motor Position (deg) Time (s)
20 Motor Position (deg) Time (s)
21 Motor Position (deg) } Δθ m Time (s)
22 Δθ m = counts 360 = 256 counts
23 Motor Position (deg) Time (s)
24 Velocity (deg/s) Time (s)
25 Velocity (deg/s) Time (s)
26 Velocity (deg/s) Time (s)
27 80 70 Motor Velocity (degrees) Time (s)
28 Time (s) Motor Position (degrees)

29
30
31

32
33 Time Since Last Cycle (ms) Haptic Thread Cycle Index
34 Time (s) Motor Position (degrees)
35 35.5 Motor Position (degrees) Actual Time (s)
36 Time (s) Motor Velocity (deg/s)
37 Actual Time (s) Motor Velocity (deg/s)
38

39 x h F cmd
40 x h F cmd
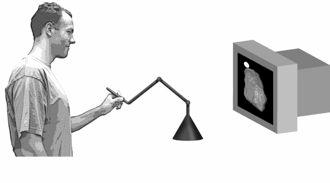
41 Teleoperation extends the reach of the human hand










42 Teleoperation extends the reach of the human hand Controller Operator Haptic Interface (Master) Remote Robot (Slave) Environment

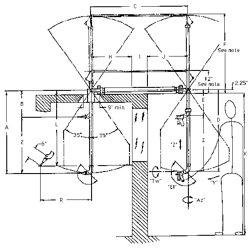
43 Mechanical Teleoperation Goertz, 1952


44

45

46 Modern Teleoperation Kuchenbecker, 2006
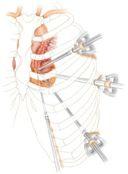
47 Robot-Assisted Minimally Invasive Surgery (Intuitive Surgical, Inc., 1998)


48 31. Telerobotics Günter Niemeyer, Carsten Preusche, Gerd Hirzinger 741 In this chapter we present an overview of the field of telerobotics with a focus on control aspects. Motivated by an historical prespective and some challenging applications of this research area a classification of control architectures is given, including an introduction to the different strategies. An emphasis is taken on bilateral control and force feedback, which is a vital research field today. Finally we suggest some literature for a closer engagement with the topic of telerobotics Control Architectures Supervisory Control Shared Control Direct and Bilateral Teleoperation Bilateral Control and Force Feedback Position/Force Control Passivity and Stability Transparency and Multichannel Feedback Time Delay and Scattering Theory Overview Wave Variables Telerobotic Systems and Applications Conclusions and Further Reading Historical Perspective Applications References Overview Telerobotics is perhaps one of the earliest aspects of robotics. Literally meaning robotics at a distance, it is generally understood to refer to robotics with a human operator in control or human-in-the-loop. Any highlevel, planning, or cognitive decisions are made by the human user, while the robot is responsible for their mechanical implementation. In essence, the brain is removed or distant from the body. Herein the term tele, which is derived from the Greek and means distant, is generalized to imply a barrier between the user and the environment. This barrier is overcome by remote-controlling a robot at the environment, as indicated in Fig Besides distance, barriers may be imposed by hazardous environments or scaling to very large or small environments. All barriers have in common that the user cannot (or will not) physically reach the environment. While the physical separation may be very small, with the human operator and the robot sometimes occupying the same room, telerobotic systems are often at least conceptually split into two sites: the local site with the human operator and all elements necessary to support the system s connection with the user, which could be joysticks, monitors, keyboards, or other input/output devices, and the remote site, which contains the robot and supporting sensors and control elements. To support this functionality, telerobotics integrates many areas of robotics. At the remote site, to operate the robot and execute the human s commands, the system may control the motion and/or forces of the robot. We refer to Chaps. 6 and 7 for detailed descriptions of these areas. Also, sensors are invaluable (Chap. 4), including force sensors (Chap. 19) and others (Part C). Meanwhile, at the local site information is often displayed haptically (Chap. 30). A recent addition to telerobotics is the use of computer networks to transmit information between the two sites. This is the focus of Chap. 32 and opens up new possibilities in architectures. For example a single robot may be shared between multiple users or a single user may Springer Handbook of Robotics Siciliano, Khatib (Eds.) Springer Part D 31 G. Niemeyer, C. Preusche, and G. Hirzinger. Telerobotics. Chapter 31 in Springer Handbook of Robotics, Siciliano and Khatib, Eds., pp Provides a good introduction to the topic of teleoperation, including discussions of varying levels of remote robot autonomy and different control schemes for achieving force feedback.
49 Teleoperation x h F cmd Teleoperation has always been tightly intertwined with robotics, especially manipulators. Control system design is a primary concern: Stability Transparency
50 Teleoperation Controller How do we want this system to behave? How should we connect the sensors and actuators of the master and slave to make the system behave well?
51 Position-Forward Control
52 Position-Force Control
53 Position-Position Control
54 Position-Position Control With two impedance-type (backdrivable) devices, the most common controller is position-position, also known as position exchange. Each device has a desired state (position and velocity), which is computed from measured states. Separate controllers try to make each device achieve its desired state by using the motors to output forces.
55 Name Midterm Exam MEAM 520, Introduction to Robotics University of Pennsylvania Katherine J. Kuchenbecker, Ph.D. November 8, 2012 You must take this exam independently, without assistance from anyone else. You may bring in a calculator and two sheets of notes for reference. Aside from these two pages of notes, you may not consult any outside references, such as the textbook or the Internet. Any suspected violations of Penn s Code of Academic Integrity will be reported to the Office of Student Conduct for investigation. This exam consists of several problems. We recommend you look at all of the problems before starting to work. If you need clarification on any question, please ask a member of the teaching team. When you work out each problem, please show all steps and box your answer.onproblems involving actual numbers, please keep your solution symbolic for as long as possible; this will make your work easier to follow and easier to grade. The exam is worth a total of 100 points, and partial credit will be awarded for the correct approach even when you do not arrive at the correct answer. Points Score Problem 1 20 Problem 2 20 Problem 3 15 Problem 4 20 Problem 5 25 Total 100 I agree to abide by the University of Pennsylvania Code of Academic Integrity during this exam. I pledge that all work is my own and has been completed without the use of unauthorized aid or materials. Signature Date 1



56 Mean = 76.6 Median = 78.0 St. Dev. = 13.2 Midterm Overall Students



")


57 20 15 Mean = 13.5 Median = 14.0 St. Dev. = 3.4 Problem 1 (Short Answers) Students






58 20 15 Mean = 14.0 Median = 16.0 St. Dev. = 6.3 Problem 2 (Homogeneous Transformations) Students
 Mean = 9.9 Median = 11.")



59 15 Problem 3 (Inverse Orientation Kinematics) Mean = 9.9 Median = 11.0 St. Dev. = R = R z,φ R y,θ R x,ψ = c φ c θ s φ c ψ + c φ s θ s ψ s φ s ψ + c φ s θ c ψ s φ c θ c φ c ψ + s φ s θ s ψ c φ s ψ + s φ s θ c ψ s θ c θ s ψ c θ c ψ R = r 11 r 12 r 13 r 21 r 22 r 23 r 31 r 32 r 33 0 Students



60 20 Mean = 18.5 Median = 19.0 St. Dev. = 2.5 Problem 4 (DH Parameters) Students





61 25 20 Problem 5 (Inverse Position Kinematics, Jacobian, Singularities) Mean = 20.7 Median = 22.0 St. Dev. = Students

62
63
64 Look over your exam and compare with the solution. If you think we made a mistake in grading your test, write out an explanation on a separate piece of paper. Give your written inquiry and your test to Philip. We will correct any grading mistakes.
65 Approximate grade breakdown A+ 96 A 89 A- 83 B+ 78 B 73 B- 66 C+ 60 C 54 C- Please make an appointment to talk with me if you got less than a 55/100.
MEAM 520. Haptic Rendering and Teleoperation
 MEAM 520 Haptic Rendering and Teleoperation Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture
MEAM 520 Haptic Rendering and Teleoperation Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics
 Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
Lecture 9: Teleoperation
 ME 327: Design and Control of Haptic Systems Autumn 2018 Lecture 9: Teleoperation Allison M. Okamura Stanford University teleoperation history and examples the genesis of teleoperation? a Polygraph is
ME 327: Design and Control of Haptic Systems Autumn 2018 Lecture 9: Teleoperation Allison M. Okamura Stanford University teleoperation history and examples the genesis of teleoperation? a Polygraph is
Haptic Tele-Assembly over the Internet
 Haptic Tele-Assembly over the Internet Sandra Hirche, Bartlomiej Stanczyk, and Martin Buss Institute of Automatic Control Engineering, Technische Universität München D-829 München, Germany, http : //www.lsr.ei.tum.de
Haptic Tele-Assembly over the Internet Sandra Hirche, Bartlomiej Stanczyk, and Martin Buss Institute of Automatic Control Engineering, Technische Universität München D-829 München, Germany, http : //www.lsr.ei.tum.de
2. Introduction to Computer Haptics
 2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
Performance Issues in Collaborative Haptic Training
 27 IEEE International Conference on Robotics and Automation Roma, Italy, 1-14 April 27 FrA4.4 Performance Issues in Collaborative Haptic Training Behzad Khademian and Keyvan Hashtrudi-Zaad Abstract This
27 IEEE International Conference on Robotics and Automation Roma, Italy, 1-14 April 27 FrA4.4 Performance Issues in Collaborative Haptic Training Behzad Khademian and Keyvan Hashtrudi-Zaad Abstract This
Enhanced performance of delayed teleoperator systems operating within nondeterministic environments
 University of Wollongong Research Online University of Wollongong Thesis Collection 1954-2016 University of Wollongong Thesis Collections 2010 Enhanced performance of delayed teleoperator systems operating
University of Wollongong Research Online University of Wollongong Thesis Collection 1954-2016 University of Wollongong Thesis Collections 2010 Enhanced performance of delayed teleoperator systems operating
Passive Bilateral Teleoperation
 Passive Bilateral Teleoperation Project: Reconfigurable Control of Robotic Systems Over Networks Márton Lırinc Dept. Of Electrical Engineering Sapientia University Overview What is bilateral teleoperation?
Passive Bilateral Teleoperation Project: Reconfigurable Control of Robotic Systems Over Networks Márton Lırinc Dept. Of Electrical Engineering Sapientia University Overview What is bilateral teleoperation?
Information and Program
 Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Computer Assisted Medical Interventions
 Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Haptics CS327A
 Haptics CS327A - 217 hap tic adjective relating to the sense of touch or to the perception and manipulation of objects using the senses of touch and proprioception 1 2 Slave Master 3 Courtesy of Walischmiller
Haptics CS327A - 217 hap tic adjective relating to the sense of touch or to the perception and manipulation of objects using the senses of touch and proprioception 1 2 Slave Master 3 Courtesy of Walischmiller
AC : MEDICAL ROBOTICS LABORATORY FOR BIOMEDICAL ENGINEERS
 AC 2008-1272: MEDICAL ROBOTICS LABORATORY FOR BIOMEDICAL ENGINEERS Shahin Sirouspour, McMaster University http://www.ece.mcmaster.ca/~sirouspour/ Mahyar Fotoohi, Quanser Inc Pawel Malysz, McMaster University
AC 2008-1272: MEDICAL ROBOTICS LABORATORY FOR BIOMEDICAL ENGINEERS Shahin Sirouspour, McMaster University http://www.ece.mcmaster.ca/~sirouspour/ Mahyar Fotoohi, Quanser Inc Pawel Malysz, McMaster University
Haptic Virtual Fixtures for Robot-Assisted Manipulation
 Haptic Virtual Fixtures for Robot-Assisted Manipulation Jake J. Abbott, Panadda Marayong, and Allison M. Okamura Department of Mechanical Engineering, The Johns Hopkins University {jake.abbott, pmarayong,
Haptic Virtual Fixtures for Robot-Assisted Manipulation Jake J. Abbott, Panadda Marayong, and Allison M. Okamura Department of Mechanical Engineering, The Johns Hopkins University {jake.abbott, pmarayong,
Modeling and Experimental Studies of a Novel 6DOF Haptic Device
 Proceedings of The Canadian Society for Mechanical Engineering Forum 2010 CSME FORUM 2010 June 7-9, 2010, Victoria, British Columbia, Canada Modeling and Experimental Studies of a Novel DOF Haptic Device
Proceedings of The Canadian Society for Mechanical Engineering Forum 2010 CSME FORUM 2010 June 7-9, 2010, Victoria, British Columbia, Canada Modeling and Experimental Studies of a Novel DOF Haptic Device
Elements of Haptic Interfaces
 Elements of Haptic Interfaces Katherine J. Kuchenbecker Department of Mechanical Engineering and Applied Mechanics University of Pennsylvania kuchenbe@seas.upenn.edu Course Notes for MEAM 625, University
Elements of Haptic Interfaces Katherine J. Kuchenbecker Department of Mechanical Engineering and Applied Mechanics University of Pennsylvania kuchenbe@seas.upenn.edu Course Notes for MEAM 625, University
Booklet of teaching units
 International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
Using Simulation to Design Control Strategies for Robotic No-Scar Surgery
 Using Simulation to Design Control Strategies for Robotic No-Scar Surgery Antonio DE DONNO 1, Florent NAGEOTTE, Philippe ZANNE, Laurent GOFFIN and Michel de MATHELIN LSIIT, University of Strasbourg/CNRS,
Using Simulation to Design Control Strategies for Robotic No-Scar Surgery Antonio DE DONNO 1, Florent NAGEOTTE, Philippe ZANNE, Laurent GOFFIN and Michel de MATHELIN LSIIT, University of Strasbourg/CNRS,
Real-Time Bilateral Control for an Internet-Based Telerobotic System
 708 Real-Time Bilateral Control for an Internet-Based Telerobotic System Jahng-Hyon PARK, Joonyoung PARK and Seungjae MOON There is a growing tendency to use the Internet as the transmission medium of
708 Real-Time Bilateral Control for an Internet-Based Telerobotic System Jahng-Hyon PARK, Joonyoung PARK and Seungjae MOON There is a growing tendency to use the Internet as the transmission medium of
Robotics Introduction Matteo Matteucci
 Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
The Haptic Impendance Control through Virtual Environment Force Compensation
 The Haptic Impendance Control through Virtual Environment Force Compensation OCTAVIAN MELINTE Robotics and Mechatronics Department Institute of Solid Mechanicsof the Romanian Academy ROMANIA octavian.melinte@yahoo.com
The Haptic Impendance Control through Virtual Environment Force Compensation OCTAVIAN MELINTE Robotics and Mechatronics Department Institute of Solid Mechanicsof the Romanian Academy ROMANIA octavian.melinte@yahoo.com
On Application of Virtual Fixtures as an Aid for Telemanipulation and Training
 On Application of Virtual Fixtures as an Aid for Telemanipulation and Training Shahram Payandeh and Zoran Stanisic Experimental Robotics Laboratory (ERL) School of Engineering Science Simon Fraser University
On Application of Virtual Fixtures as an Aid for Telemanipulation and Training Shahram Payandeh and Zoran Stanisic Experimental Robotics Laboratory (ERL) School of Engineering Science Simon Fraser University
Lecture 1: Introduction to haptics and Kinesthetic haptic devices
 ME 327: Design and Control of Haptic Systems Winter 2018 Lecture 1: Introduction to haptics and Kinesthetic haptic devices Allison M. Okamura Stanford University today s objectives introduce you to the
ME 327: Design and Control of Haptic Systems Winter 2018 Lecture 1: Introduction to haptics and Kinesthetic haptic devices Allison M. Okamura Stanford University today s objectives introduce you to the
phri: specialization groups HS PRELIMINARY
 phri: specialization groups HS 2019 - PRELIMINARY 1) VELOCITY ESTIMATION WITH HALL EFFECT SENSOR 2) VELOCITY MEASUREMENT: TACHOMETER VS HALL SENSOR 3) POSITION AND VELOCTIY ESTIMATION BASED ON KALMAN FILTER
phri: specialization groups HS 2019 - PRELIMINARY 1) VELOCITY ESTIMATION WITH HALL EFFECT SENSOR 2) VELOCITY MEASUREMENT: TACHOMETER VS HALL SENSOR 3) POSITION AND VELOCTIY ESTIMATION BASED ON KALMAN FILTER
COS Lecture 1 Autonomous Robot Navigation
 COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
Applying Model Mediation Method to a Mobile Robot Bilateral Teleoperation System Experiencing Time Delays in Communication
 Applying Model Mediation Method to a Mobile Robot Bilateral Teleoperation System Experiencing Time Delays in Communication B. Taner * M. İ. C. Dede E. Uzunoğlu İzmir Institute of Technology İzmir Institute
Applying Model Mediation Method to a Mobile Robot Bilateral Teleoperation System Experiencing Time Delays in Communication B. Taner * M. İ. C. Dede E. Uzunoğlu İzmir Institute of Technology İzmir Institute
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo. Introduction: Applications, Problems, Architectures
 Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Haptic Communication for the Tactile Internet
 Technical University of Munich (TUM) Chair of Media Technology European Wireless, EW 17 Dresden, May 17, 2017 Telepresence Network audiovisual communication Although conversational services are bidirectional,
Technical University of Munich (TUM) Chair of Media Technology European Wireless, EW 17 Dresden, May 17, 2017 Telepresence Network audiovisual communication Although conversational services are bidirectional,
Robotic System Simulation and Modeling Stefan Jörg Robotic and Mechatronic Center
 Robotic System Simulation and ing Stefan Jörg Robotic and Mechatronic Center Outline Introduction The SAFROS Robotic System Simulator Robotic System ing Conclusions Folie 2 DLR s Mirosurge: A versatile
Robotic System Simulation and ing Stefan Jörg Robotic and Mechatronic Center Outline Introduction The SAFROS Robotic System Simulator Robotic System ing Conclusions Folie 2 DLR s Mirosurge: A versatile
ROKVISS Verification of Advanced Tele-Presence Concepts for Future Space Missions
 ROKVISS Verification of Advanced Tele-Presence Concepts for Future Space Missions ASTRA 2002 Klaus Landzettel, Bernhard Brunner, Alexander Beyer, Erich Krämer, Carsten Preusche, Bernhard-Michael Steinmetz,
ROKVISS Verification of Advanced Tele-Presence Concepts for Future Space Missions ASTRA 2002 Klaus Landzettel, Bernhard Brunner, Alexander Beyer, Erich Krämer, Carsten Preusche, Bernhard-Michael Steinmetz,
Nonlinear Adaptive Bilateral Control of Teleoperation Systems with Uncertain Dynamics and Kinematics
 Nonlinear Adaptive Bilateral Control of Teleoperation Systems with Uncertain Dynamics and Kinematics X. Liu, M. Tavakoli, and Q. Huang Abstract Research so far on adaptive bilateral control of master-slave
Nonlinear Adaptive Bilateral Control of Teleoperation Systems with Uncertain Dynamics and Kinematics X. Liu, M. Tavakoli, and Q. Huang Abstract Research so far on adaptive bilateral control of master-slave
Direct Force Reflecting Teleoperation with a Flexible Joint Robot
 Direct Force Reflecting Teleoperation with a Flexible Joint Robot Andreas Tobergte and Alin Albu-Schäffer Abstract This paper presents a high fidelity force feedback teleoperation control for surgical
Direct Force Reflecting Teleoperation with a Flexible Joint Robot Andreas Tobergte and Alin Albu-Schäffer Abstract This paper presents a high fidelity force feedback teleoperation control for surgical
Shape Memory Alloy Actuator Controller Design for Tactile Displays
 34th IEEE Conference on Decision and Control New Orleans, Dec. 3-5, 995 Shape Memory Alloy Actuator Controller Design for Tactile Displays Robert D. Howe, Dimitrios A. Kontarinis, and William J. Peine
34th IEEE Conference on Decision and Control New Orleans, Dec. 3-5, 995 Shape Memory Alloy Actuator Controller Design for Tactile Displays Robert D. Howe, Dimitrios A. Kontarinis, and William J. Peine
Università di Roma La Sapienza. Medical Robotics. A Teleoperation System for Research in MIRS. Marilena Vendittelli
 Università di Roma La Sapienza Medical Robotics A Teleoperation System for Research in MIRS Marilena Vendittelli the DLR teleoperation system slave three versatile robots MIRO light-weight: weight < 10
Università di Roma La Sapienza Medical Robotics A Teleoperation System for Research in MIRS Marilena Vendittelli the DLR teleoperation system slave three versatile robots MIRO light-weight: weight < 10
Networked haptic cooperation using remote dynamic proxies
 29 Second International Conferences on Advances in Computer-Human Interactions Networked haptic cooperation using remote dynamic proxies Zhi Li Department of Mechanical Engineering University of Victoria
29 Second International Conferences on Advances in Computer-Human Interactions Networked haptic cooperation using remote dynamic proxies Zhi Li Department of Mechanical Engineering University of Victoria
Medical Robotics. Part II: SURGICAL ROBOTICS
 5 Medical Robotics Part II: SURGICAL ROBOTICS In the last decade, surgery and robotics have reached a maturity that has allowed them to be safely assimilated to create a new kind of operating room. This
5 Medical Robotics Part II: SURGICAL ROBOTICS In the last decade, surgery and robotics have reached a maturity that has allowed them to be safely assimilated to create a new kind of operating room. This
HOLY ANGEL UNIVERSITY COLLEGE OF INFORMATION AND COMMUNICATIONS TECHNOLOGY ROBOT MODELING AND PROGRAMMING COURSE SYLLABUS
 HOLY ANGEL UNIVERSITY COLLEGE OF INFORMATION AND COMMUNICATIONS TECHNOLOGY ROBOT MODELING AND PROGRAMMING COURSE SYLLABUS Code : 6ROBOTMOD Prerequisite : 6ARTINTEL Credit : 3 s (3 hours LAB) Year Level:
HOLY ANGEL UNIVERSITY COLLEGE OF INFORMATION AND COMMUNICATIONS TECHNOLOGY ROBOT MODELING AND PROGRAMMING COURSE SYLLABUS Code : 6ROBOTMOD Prerequisite : 6ARTINTEL Credit : 3 s (3 hours LAB) Year Level:
Bilateral Delayed Teleoperation: The Effects of a Passivated Channel Model and Force Sensing A. Aziminejad, M. Tavakoli, R.V. Patel, M.
 2007 IEEE International Conference on Robotics and Automation Roma, Italy, 10-14 April 2007 FrA12.1 Bilateral Delayed Teleoperation: The Effects of a Passivated Channel Model and Force Sensing A. Aziminejad,
2007 IEEE International Conference on Robotics and Automation Roma, Italy, 10-14 April 2007 FrA12.1 Bilateral Delayed Teleoperation: The Effects of a Passivated Channel Model and Force Sensing A. Aziminejad,
Control design issues for a microinvasive neurosurgery teleoperator system
 Control design issues for a microinvasive neurosurgery teleoperator system Jacopo Semmoloni, Rudy Manganelli, Alessandro Formaglio and Domenico Prattichizzo Abstract This paper deals with controller design
Control design issues for a microinvasive neurosurgery teleoperator system Jacopo Semmoloni, Rudy Manganelli, Alessandro Formaglio and Domenico Prattichizzo Abstract This paper deals with controller design
Bruno Siciliano Luigi Villani Vincenzo Lippiello. Francesca Cordella Mariacarla Staffa.
 1/20 Robotics @ PRISMA Lab Bruno Siciliano Luigi Villani Vincenzo Lippiello Fanny Ficuciello i Fabio Ruggiero Francesca Cordella Mariacarla Staffa www.prisma.unina.it i it 18 February 2010 City 1,200,000
1/20 Robotics @ PRISMA Lab Bruno Siciliano Luigi Villani Vincenzo Lippiello Fanny Ficuciello i Fabio Ruggiero Francesca Cordella Mariacarla Staffa www.prisma.unina.it i it 18 February 2010 City 1,200,000
Force Feedback Mechatronics in Medecine, Healthcare and Rehabilitation
 Force Feedback Mechatronics in Medecine, Healthcare and Rehabilitation J.P. Friconneau 1, P. Garrec 1, F. Gosselin 1, A. Riwan 1, 1 CEA-LIST DTSI/SRSI, CEN/FAR BP6, 92265 Fontenay-aux-Roses, France jean-pierre.friconneau@cea.fr
Force Feedback Mechatronics in Medecine, Healthcare and Rehabilitation J.P. Friconneau 1, P. Garrec 1, F. Gosselin 1, A. Riwan 1, 1 CEA-LIST DTSI/SRSI, CEN/FAR BP6, 92265 Fontenay-aux-Roses, France jean-pierre.friconneau@cea.fr
Glossary of terms. Short explanation
 Glossary Concept Module. Video Short explanation Abstraction 2.4 Capturing the essence of the behavior of interest (getting a model or representation) Action in the control Derivative 4.2 The control signal
Glossary Concept Module. Video Short explanation Abstraction 2.4 Capturing the essence of the behavior of interest (getting a model or representation) Action in the control Derivative 4.2 The control signal
Robust Haptic Teleoperation of a Mobile Manipulation Platform
 Robust Haptic Teleoperation of a Mobile Manipulation Platform Jaeheung Park and Oussama Khatib Stanford AI Laboratory Stanford University http://robotics.stanford.edu Abstract. This paper presents a new
Robust Haptic Teleoperation of a Mobile Manipulation Platform Jaeheung Park and Oussama Khatib Stanford AI Laboratory Stanford University http://robotics.stanford.edu Abstract. This paper presents a new
Perceptual Overlays for Teaching Advanced Driving Skills
 Perceptual Overlays for Teaching Advanced Driving Skills Brent Gillespie Micah Steele ARC Conference May 24, 2000 5/21/00 1 Outline 1. Haptics in the Driver-Vehicle Interface 2. Perceptual Overlays for
Perceptual Overlays for Teaching Advanced Driving Skills Brent Gillespie Micah Steele ARC Conference May 24, 2000 5/21/00 1 Outline 1. Haptics in the Driver-Vehicle Interface 2. Perceptual Overlays for
Experimental Evaluation of Haptic Control for Human Activated Command Devices
 Experimental Evaluation of Haptic Control for Human Activated Command Devices Andrew Zammit Mangion Simon G. Fabri Faculty of Engineering, University of Malta, Msida, MSD 2080, Malta Tel: +356 (7906)1312;
Experimental Evaluation of Haptic Control for Human Activated Command Devices Andrew Zammit Mangion Simon G. Fabri Faculty of Engineering, University of Malta, Msida, MSD 2080, Malta Tel: +356 (7906)1312;
Gripper Telemanipulation System for the PR2 Robot. Jason Allen, SUNFEST (EE), University of the District of Columbia Advisor: Dr. Camillo J.
, University of the District of Columbia Advisor: Dr. Camillo J.") Gripper Telemanipulation System for the PR2 Robot Jason Allen, SUNFEST (EE), University of the District of Columbia Advisor: Dr. Camillo J. Taylor Abstract The most common method of teleoperation has an
Gripper Telemanipulation System for the PR2 Robot Jason Allen, SUNFEST (EE), University of the District of Columbia Advisor: Dr. Camillo J. Taylor Abstract The most common method of teleoperation has an
Cognitive Robotics 2016/2017
 Cognitive Robotics 2016/2017 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Cognitive Robotics 2016/2017 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Novel machine interface for scaled telesurgery
 Novel machine interface for scaled telesurgery S. Clanton, D. Wang, Y. Matsuoka, D. Shelton, G. Stetten SPIE Medical Imaging, vol. 5367, pp. 697-704. San Diego, Feb. 2004. A Novel Machine Interface for
Novel machine interface for scaled telesurgery S. Clanton, D. Wang, Y. Matsuoka, D. Shelton, G. Stetten SPIE Medical Imaging, vol. 5367, pp. 697-704. San Diego, Feb. 2004. A Novel Machine Interface for
A Digital Input Shaper for Stable and Transparent Haptic Interaction
 21 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 21, Anchorage, Alaska, USA A Digital Input Shaper for Stable and Transparent Haptic Interaction Yo-An
21 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 21, Anchorage, Alaska, USA A Digital Input Shaper for Stable and Transparent Haptic Interaction Yo-An
IOSR Journal of Engineering (IOSRJEN) e-issn: , p-issn: , Volume 2, Issue 11 (November 2012), PP 37-43
 e-issn: , p-issn: , Volume 2, Issue 11 (November 2012), PP 37-43") IOSR Journal of Engineering (IOSRJEN) e-issn: 2250-3021, p-issn: 2278-8719, Volume 2, Issue 11 (November 2012), PP 37-43 Operative Precept of robotic arm expending Haptic Virtual System Arnab Das 1, Swagat
IOSR Journal of Engineering (IOSRJEN) e-issn: 2250-3021, p-issn: 2278-8719, Volume 2, Issue 11 (November 2012), PP 37-43 Operative Precept of robotic arm expending Haptic Virtual System Arnab Das 1, Swagat
AHAPTIC interface is a kinesthetic link between a human
 IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 13, NO. 5, SEPTEMBER 2005 737 Time Domain Passivity Control With Reference Energy Following Jee-Hwan Ryu, Carsten Preusche, Blake Hannaford, and Gerd
IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 13, NO. 5, SEPTEMBER 2005 737 Time Domain Passivity Control With Reference Energy Following Jee-Hwan Ryu, Carsten Preusche, Blake Hannaford, and Gerd
LASER ASSISTED COMBINED TELEOPERATION AND AUTONOMOUS CONTROL
 ANS EPRRSD - 13 th Robotics & remote Systems for Hazardous Environments 11 th Emergency Preparedness & Response Knoxville, TN, August 7-10, 2011, on CD-ROM, American Nuclear Society, LaGrange Park, IL
ANS EPRRSD - 13 th Robotics & remote Systems for Hazardous Environments 11 th Emergency Preparedness & Response Knoxville, TN, August 7-10, 2011, on CD-ROM, American Nuclear Society, LaGrange Park, IL
Basic Study on Sensory Aspects of a Master/Slave System for Force Telecommunication *
 Basic Study on Sensory Aspects of a /Slave System for elecommunication * Masayuki Hara Graduate School of Engineering Yokohama 24851, Japan masayuki@yabsv.jks.ynu.ac.jp Jian Huang Department of Mechanical
Basic Study on Sensory Aspects of a /Slave System for elecommunication * Masayuki Hara Graduate School of Engineering Yokohama 24851, Japan masayuki@yabsv.jks.ynu.ac.jp Jian Huang Department of Mechanical
CS277 - Experimental Haptics Lecture 2. Haptic Rendering
 CS277 - Experimental Haptics Lecture 2 Haptic Rendering Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering A note on timing...
CS277 - Experimental Haptics Lecture 2 Haptic Rendering Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering A note on timing...
A Feasibility Study of Time-Domain Passivity Approach for Bilateral Teleoperation of Mobile Manipulator
 International Conference on Control, Automation and Systems 2008 Oct. 14-17, 2008 in COEX, Seoul, Korea A Feasibility Study of Time-Domain Passivity Approach for Bilateral Teleoperation of Mobile Manipulator
International Conference on Control, Automation and Systems 2008 Oct. 14-17, 2008 in COEX, Seoul, Korea A Feasibility Study of Time-Domain Passivity Approach for Bilateral Teleoperation of Mobile Manipulator
Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery
 Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery Claudio Pacchierotti Domenico Prattichizzo Katherine J. Kuchenbecker Motivation Despite its expected clinical
Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery Claudio Pacchierotti Domenico Prattichizzo Katherine J. Kuchenbecker Motivation Despite its expected clinical
Steady-Hand Teleoperation with Virtual Fixtures
 Steady-Hand Teleoperation with Virtual Fixtures Jake J. Abbott 1, Gregory D. Hager 2, and Allison M. Okamura 1 1 Department of Mechanical Engineering 2 Department of Computer Science The Johns Hopkins
Steady-Hand Teleoperation with Virtual Fixtures Jake J. Abbott 1, Gregory D. Hager 2, and Allison M. Okamura 1 1 Department of Mechanical Engineering 2 Department of Computer Science The Johns Hopkins
Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Politecnico di Milano - Dipartimento di Elettronica, Informazione e Bioingegneria Industrial robotics
Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Politecnico di Milano - Dipartimento di Elettronica, Informazione e Bioingegneria Industrial robotics
Lecture 6: Kinesthetic haptic devices: Control
 ME 327: Design and Control of Haptic Systems Autumn 2018 Lecture 6: Kinesthetic haptic devices: Control Allison M. Okamura Stanford University important stability concepts instability / limit cycle oscillation
ME 327: Design and Control of Haptic Systems Autumn 2018 Lecture 6: Kinesthetic haptic devices: Control Allison M. Okamura Stanford University important stability concepts instability / limit cycle oscillation
Cognitive Robotics 2017/2018
 Cognitive Robotics 2017/2018 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Cognitive Robotics 2017/2018 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Increasing the Impedance Range of a Haptic Display by Adding Electrical Damping
 Increasing the Impedance Range of a Haptic Display by Adding Electrical Damping Joshua S. Mehling * J. Edward Colgate Michael A. Peshkin (*)NASA Johnson Space Center, USA ( )Department of Mechanical Engineering,
Increasing the Impedance Range of a Haptic Display by Adding Electrical Damping Joshua S. Mehling * J. Edward Colgate Michael A. Peshkin (*)NASA Johnson Space Center, USA ( )Department of Mechanical Engineering,
Some Issues on Integrating Telepresence Technology into Industrial Robotic Assembly
 Some Issues on Integrating Telepresence Technology into Industrial Robotic Assembly Gunther Reinhart and Marwan Radi Abstract Since the 1940s, many promising telepresence research results have been obtained.
Some Issues on Integrating Telepresence Technology into Industrial Robotic Assembly Gunther Reinhart and Marwan Radi Abstract Since the 1940s, many promising telepresence research results have been obtained.
Haptic interaction. Ruth Aylett
 Haptic interaction Ruth Aylett Contents Haptic definition Haptic model Haptic devices Measuring forces Haptic Technologies Haptics refers to manual interactions with environments, such as sensorial exploration
Haptic interaction Ruth Aylett Contents Haptic definition Haptic model Haptic devices Measuring forces Haptic Technologies Haptics refers to manual interactions with environments, such as sensorial exploration
Visuo-Haptic Interface for Teleoperation of Mobile Robot Exploration Tasks
 Visuo-Haptic Interface for Teleoperation of Mobile Robot Exploration Tasks Nikos C. Mitsou, Spyros V. Velanas and Costas S. Tzafestas Abstract With the spread of low-cost haptic devices, haptic interfaces
Visuo-Haptic Interface for Teleoperation of Mobile Robot Exploration Tasks Nikos C. Mitsou, Spyros V. Velanas and Costas S. Tzafestas Abstract With the spread of low-cost haptic devices, haptic interfaces
WB2306 The Human Controller
 Simulation WB2306 The Human Controller Class 1. General Introduction Adapt the device to the human, not the human to the device! Teacher: David ABBINK Assistant professor at Delft Haptics Lab (www.delfthapticslab.nl)
Simulation WB2306 The Human Controller Class 1. General Introduction Adapt the device to the human, not the human to the device! Teacher: David ABBINK Assistant professor at Delft Haptics Lab (www.delfthapticslab.nl)
Fundamentals of Robotics
 Coordinating unit: Teaching unit: Academic year: Degree: ECTS credits: 2017 205 - ESEIAAT - Terrassa School of Industrial, Aerospace and Audiovisual Engineering 707 - ESAII - Department of Automatic Control
Coordinating unit: Teaching unit: Academic year: Degree: ECTS credits: 2017 205 - ESEIAAT - Terrassa School of Industrial, Aerospace and Audiovisual Engineering 707 - ESAII - Department of Automatic Control
Teleoperation. History and applications
 Teleoperation History and applications Notes You always need telesystem or human intervention as a backup at some point a human will need to take control embed in your design Roboticists automate what
Teleoperation History and applications Notes You always need telesystem or human intervention as a backup at some point a human will need to take control embed in your design Roboticists automate what
CS277 - Experimental Haptics Lecture 1. Introduction to Haptics
 CS277 - Experimental Haptics Lecture 1 Introduction to Haptics Haptic Interfaces Enables physical interaction with virtual objects Haptic Rendering Potential Fields Polygonal Meshes Implicit Surfaces Volumetric
CS277 - Experimental Haptics Lecture 1 Introduction to Haptics Haptic Interfaces Enables physical interaction with virtual objects Haptic Rendering Potential Fields Polygonal Meshes Implicit Surfaces Volumetric
Decomposing the Performance of Admittance and Series Elastic Haptic Rendering Architectures
 Decomposing the Performance of Admittance and Series Elastic Haptic Rendering Architectures Emma Treadway 1, Yi Yang 1, and R. Brent Gillespie 1 Abstract In this paper, we explore certain tradeoffs in
Decomposing the Performance of Admittance and Series Elastic Haptic Rendering Architectures Emma Treadway 1, Yi Yang 1, and R. Brent Gillespie 1 Abstract In this paper, we explore certain tradeoffs in
Investigation on MDOF Bilateral Teleoperation Control System Using Geared DC-Motor
 Modern Applied Science; Vol. 10, No. 11; 2016 ISSN 1913-1844 E-ISSN 1913-1852 Published by Canadian Center of Science and Education Investigation on MDOF Bilateral Teleoperation Control System Using Geared
Modern Applied Science; Vol. 10, No. 11; 2016 ISSN 1913-1844 E-ISSN 1913-1852 Published by Canadian Center of Science and Education Investigation on MDOF Bilateral Teleoperation Control System Using Geared
Fuzzy Logic Based Force-Feedback for Obstacle Collision Avoidance of Robot Manipulators
 Fuzzy Logic Based Force-Feedback for Obstacle Collision Avoidance of Robot Manipulators D. Wijayasekara, M. Manic Department of Computer Science University of Idaho Idaho Falls, USA wija2589@vandals.uidaho.edu,
Fuzzy Logic Based Force-Feedback for Obstacle Collision Avoidance of Robot Manipulators D. Wijayasekara, M. Manic Department of Computer Science University of Idaho Idaho Falls, USA wija2589@vandals.uidaho.edu,
TELEOPERATED SYSTEM WITH ACCELEROMETERS FOR DISABILITY
 TELEOPERATED SYSTEM WITH ACCELEROMETERS FOR DISABILITY Josue Zarate Valdez Ruben Diaz Cucho University San Luis Gonzaga, Peru Abstract This project involves the implementation of a teleoperated arm using
TELEOPERATED SYSTEM WITH ACCELEROMETERS FOR DISABILITY Josue Zarate Valdez Ruben Diaz Cucho University San Luis Gonzaga, Peru Abstract This project involves the implementation of a teleoperated arm using
Position and Force Control of Teleoperation System Based on PHANTOM Omni Robots
 International Journal of Mechanical Engineering and Robotics Research Vol. 5, No., January 6 Position and Force Control of Teleoperation System Based on PHANTOM Omni Robots Rong Kong, Xiucheng Dong, and
International Journal of Mechanical Engineering and Robotics Research Vol. 5, No., January 6 Position and Force Control of Teleoperation System Based on PHANTOM Omni Robots Rong Kong, Xiucheng Dong, and
On Observer-based Passive Robust Impedance Control of a Robot Manipulator
 Journal of Mechanics Engineering and Automation 7 (2017) 71-78 doi: 10.17265/2159-5275/2017.02.003 D DAVID PUBLISHING On Observer-based Passive Robust Impedance Control of a Robot Manipulator CAO Sheng,
Journal of Mechanics Engineering and Automation 7 (2017) 71-78 doi: 10.17265/2159-5275/2017.02.003 D DAVID PUBLISHING On Observer-based Passive Robust Impedance Control of a Robot Manipulator CAO Sheng,
CHARACTERIZING THE HUMAN WRIST FOR IMPROVED HAPTIC INTERACTION
 Proceedings of IMECE 23 23 International Mechanical Engineering Congress and Exposition November 16-21, 23, Washington, D.C. USA IMECE23-4217 CHARACTERIZING THE HUMAN WRIST FOR IMPROVED HAPTIC INTERACTION
Proceedings of IMECE 23 23 International Mechanical Engineering Congress and Exposition November 16-21, 23, Washington, D.C. USA IMECE23-4217 CHARACTERIZING THE HUMAN WRIST FOR IMPROVED HAPTIC INTERACTION
Force Feedback Stabilization for Remote Control of An Assistive Mobile Robot
 211 American Control Conference on O'Farrell Street, San Francisco, CA, USA June 29 - July 1, 211 Force Feedback Stabilization for Remote Control of An Assistive Mobile Robot H. Arioui and L. Temzi and
211 American Control Conference on O'Farrell Street, San Francisco, CA, USA June 29 - July 1, 211 Force Feedback Stabilization for Remote Control of An Assistive Mobile Robot H. Arioui and L. Temzi and
Image Guided Robotic Assisted Surgical Training System using LabVIEW and CompactRIO
 Image Guided Robotic Assisted Surgical Training System using LabVIEW and CompactRIO Weimin Huang 1, Tao Yang 1, Liang Jing Yang 2, Chee Kong Chui 2, Jimmy Liu 1, Jiayin Zhou 1, Jing Zhang 1, Yi Su 3, Stephen
Image Guided Robotic Assisted Surgical Training System using LabVIEW and CompactRIO Weimin Huang 1, Tao Yang 1, Liang Jing Yang 2, Chee Kong Chui 2, Jimmy Liu 1, Jiayin Zhou 1, Jing Zhang 1, Yi Su 3, Stephen
INDUSTRIAL ROBOTS PROGRAMMING: BUILDING APPLICATIONS FOR THE FACTORIES OF THE FUTURE
 INDUSTRIAL ROBOTS PROGRAMMING: BUILDING APPLICATIONS FOR THE FACTORIES OF THE FUTURE INDUSTRIAL ROBOTS PROGRAMMING: BUILDING APPLICATIONS FOR THE FACTORIES OF THE FUTURE J. Norberto Pires Mechanical Engineering
INDUSTRIAL ROBOTS PROGRAMMING: BUILDING APPLICATIONS FOR THE FACTORIES OF THE FUTURE INDUSTRIAL ROBOTS PROGRAMMING: BUILDING APPLICATIONS FOR THE FACTORIES OF THE FUTURE J. Norberto Pires Mechanical Engineering
2B34 DEVELOPMENT OF A HYDRAULIC PARALLEL LINK TYPE OF FORCE DISPLAY
 2B34 DEVELOPMENT OF A HYDRAULIC PARALLEL LINK TYPE OF FORCE DISPLAY -Improvement of Manipulability Using Disturbance Observer and its Application to a Master-slave System- Shigeki KUDOMI*, Hironao YAMADA**
2B34 DEVELOPMENT OF A HYDRAULIC PARALLEL LINK TYPE OF FORCE DISPLAY -Improvement of Manipulability Using Disturbance Observer and its Application to a Master-slave System- Shigeki KUDOMI*, Hironao YAMADA**
Evaluation of Five-finger Haptic Communication with Network Delay
 Tactile Communication Haptic Communication Network Delay Evaluation of Five-finger Haptic Communication with Network Delay To realize tactile communication, we clarify some issues regarding how delay affects
Tactile Communication Haptic Communication Network Delay Evaluation of Five-finger Haptic Communication with Network Delay To realize tactile communication, we clarify some issues regarding how delay affects
ROBOTICS ENG YOUSEF A. SHATNAWI INTRODUCTION
 ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ME 487 Mechatronics. Office: JH 515, Tel.: (505)
") ME 487 Mechatronics Instructor: Assistant: Dr. Ou Ma Office: JH 515, Email: oma@nmsu.edu Tel.: (505)646-6534 Xiumin Diao (Ph.D. student) Office: JH 608, Email: xiumin@nmsu.edu Tel.: (505)646-6544 Dept.
ME 487 Mechatronics Instructor: Assistant: Dr. Ou Ma Office: JH 515, Email: oma@nmsu.edu Tel.: (505)646-6534 Xiumin Diao (Ph.D. student) Office: JH 608, Email: xiumin@nmsu.edu Tel.: (505)646-6544 Dept.
Exploring Haptics in Digital Waveguide Instruments
 Exploring Haptics in Digital Waveguide Instruments 1 Introduction... 1 2 Factors concerning Haptic Instruments... 2 2.1 Open and Closed Loop Systems... 2 2.2 Sampling Rate of the Control Loop... 2 3 An
Exploring Haptics in Digital Waveguide Instruments 1 Introduction... 1 2 Factors concerning Haptic Instruments... 2 2.1 Open and Closed Loop Systems... 2 2.2 Sampling Rate of the Control Loop... 2 3 An
Wednesday, October 29, :00-04:00pm EB: 3546D. TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof.
 Wednesday, October 29, 2014 02:00-04:00pm EB: 3546D TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof. Ning Xi ABSTRACT Mobile manipulators provide larger working spaces and more flexibility
Wednesday, October 29, 2014 02:00-04:00pm EB: 3546D TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof. Ning Xi ABSTRACT Mobile manipulators provide larger working spaces and more flexibility
Haptic Rendering CPSC / Sonny Chan University of Calgary
 Haptic Rendering CPSC 599.86 / 601.86 Sonny Chan University of Calgary Today s Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering
Haptic Rendering CPSC 599.86 / 601.86 Sonny Chan University of Calgary Today s Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering
Syllabus for ENGR065-01: Circuit Theory
 Syllabus for ENGR065-01: Circuit Theory Fall 2017 Instructor: Huifang Dou Designation: Catalog Description: Text Books and Other Required Materials: Course Objectives Student Learning Outcomes: Course
Syllabus for ENGR065-01: Circuit Theory Fall 2017 Instructor: Huifang Dou Designation: Catalog Description: Text Books and Other Required Materials: Course Objectives Student Learning Outcomes: Course
Autonomous Mobile Robot Design. Dr. Kostas Alexis (CSE)
") Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
Large Workspace Haptic Devices - A New Actuation Approach
 Large Workspace Haptic Devices - A New Actuation Approach Michael Zinn Department of Mechanical Engineering University of Wisconsin - Madison Oussama Khatib Robotics Laboratory Department of Computer Science
Large Workspace Haptic Devices - A New Actuation Approach Michael Zinn Department of Mechanical Engineering University of Wisconsin - Madison Oussama Khatib Robotics Laboratory Department of Computer Science
Improving Telerobotic Touch Via High-Frequency Acceleration Matching
 Improving Telerobotic Touch Via High-Frequency Acceleration Matching Katherine J. Kuchenbecker and Günter Niemeyer Stanford University Telerobotics Lab Stanford California 9435-42 Website: http://telerobotics.stanford.edu
Improving Telerobotic Touch Via High-Frequency Acceleration Matching Katherine J. Kuchenbecker and Günter Niemeyer Stanford University Telerobotics Lab Stanford California 9435-42 Website: http://telerobotics.stanford.edu
A Compliant Five-Bar, 2-Degree-of-Freedom Device with Coil-driven Haptic Control
 2004 ASME Student Mechanism Design Competition A Compliant Five-Bar, 2-Degree-of-Freedom Device with Coil-driven Haptic Control Team Members Felix Huang Audrey Plinta Michael Resciniti Paul Stemniski Brian
2004 ASME Student Mechanism Design Competition A Compliant Five-Bar, 2-Degree-of-Freedom Device with Coil-driven Haptic Control Team Members Felix Huang Audrey Plinta Michael Resciniti Paul Stemniski Brian
Chapter 1 Introduction to Robotics
 Chapter 1 Introduction to Robotics PS: Most of the pages of this presentation were obtained and adapted from various sources in the internet. 1 I. Definition of Robotics Definition (Robot Institute of
Chapter 1 Introduction to Robotics PS: Most of the pages of this presentation were obtained and adapted from various sources in the internet. 1 I. Definition of Robotics Definition (Robot Institute of
Design of an Intermediate Layer to Enhance Operator Awareness and Safety in Telesurgical Systems
 212 IEEE/RSJ International Conference on Intelligent Robots and Systems October 7-12, 212. Vilamoura, Algarve, Portugal Design of an Intermediate Layer to Enhance Operator Awareness and Safety in Telesurgical
212 IEEE/RSJ International Conference on Intelligent Robots and Systems October 7-12, 212. Vilamoura, Algarve, Portugal Design of an Intermediate Layer to Enhance Operator Awareness and Safety in Telesurgical
Masatoshi Ishikawa, Akio Namiki, Takashi Komuro, and Idaku Ishii
 1ms Sensory-Motor Fusion System with Hierarchical Parallel Processing Architecture Masatoshi Ishikawa, Akio Namiki, Takashi Komuro, and Idaku Ishii Department of Mathematical Engineering and Information
1ms Sensory-Motor Fusion System with Hierarchical Parallel Processing Architecture Masatoshi Ishikawa, Akio Namiki, Takashi Komuro, and Idaku Ishii Department of Mathematical Engineering and Information
A PASSIVITY-BASED SYSTEM DESIGN
 A PASSIVITY-BASED SYSTEM DESIGN OF SEMI-AUTONOMOUS COOPERATIVE ROBOTIC SWARM BY TAKESHI HATANAKA SCHOOL OF ENGINEERING NIKHIL CHOPRA DEPARTMENT OF MECHANICAL ENGINEERING UNIVERSITY OF MARYLAND JUNYA YAMAUCHI
A PASSIVITY-BASED SYSTEM DESIGN OF SEMI-AUTONOMOUS COOPERATIVE ROBOTIC SWARM BY TAKESHI HATANAKA SCHOOL OF ENGINEERING NIKHIL CHOPRA DEPARTMENT OF MECHANICAL ENGINEERING UNIVERSITY OF MARYLAND JUNYA YAMAUCHI
Haptic interaction. Ruth Aylett
 Haptic interaction Ruth Aylett Contents Haptic definition Haptic model Haptic devices Measuring forces Haptic Technologies Haptics refers to manual interactions with environments, such as sensorial exploration
Haptic interaction Ruth Aylett Contents Haptic definition Haptic model Haptic devices Measuring forces Haptic Technologies Haptics refers to manual interactions with environments, such as sensorial exploration
HAPTIC DEVICES FOR DESKTOP VIRTUAL PROTOTYPING APPLICATIONS
 The 3rd International Conference on Computational Mechanics and Virtual Engineering COMEC 2009 29 30 OCTOBER 2009, Brasov, Romania HAPTIC DEVICES FOR DESKTOP VIRTUAL PROTOTYPING APPLICATIONS A. Fratu 1,
The 3rd International Conference on Computational Mechanics and Virtual Engineering COMEC 2009 29 30 OCTOBER 2009, Brasov, Romania HAPTIC DEVICES FOR DESKTOP VIRTUAL PROTOTYPING APPLICATIONS A. Fratu 1,
Wireless Master-Slave Embedded Controller for a Teleoperated Anthropomorphic Robotic Arm with Gripping Force Sensing
 Wireless Master-Slave Embedded Controller for a Teleoperated Anthropomorphic Robotic Arm with Gripping Force Sensing Presented by: Benjamin B. Rhoades ECGR 6185 Adv. Embedded Systems January 16 th 2013
Wireless Master-Slave Embedded Controller for a Teleoperated Anthropomorphic Robotic Arm with Gripping Force Sensing Presented by: Benjamin B. Rhoades ECGR 6185 Adv. Embedded Systems January 16 th 2013
Future Society Opened by Real Haptics. Kouhei OHNISHI, Yuki SAITO, Satoshi FUKUSHIMA, Takuya MATSUNAGA, Takahiro NOZAKI
 Future Society Opened by Real Haptics *1 *1 *1 *1 *1 Kouhei OHNISHI, Yuki SAITO, Satoshi FUKUSHIMA, Takuya MATSUNAGA, Takahiro NOZAKI Real haptics has been a unsolved problem since its starting in 1940
Future Society Opened by Real Haptics *1 *1 *1 *1 *1 Kouhei OHNISHI, Yuki SAITO, Satoshi FUKUSHIMA, Takuya MATSUNAGA, Takahiro NOZAKI Real haptics has been a unsolved problem since its starting in 1940
Haptic Control of the Master Hand Controller for a Microsurgical Telerobot System
 Proceedings of the 1999 IEEE International Conference on Robotics & Automation Detroit, Michigan May 1999 Haptic Control of the Master Hand Controller for a Microsurgical Telerobot System Dong-Soo Kwonl,
Proceedings of the 1999 IEEE International Conference on Robotics & Automation Detroit, Michigan May 1999 Haptic Control of the Master Hand Controller for a Microsurgical Telerobot System Dong-Soo Kwonl,
Haptics ME7960, Sect. 007 Lect. 6: Device Design I
 Haptics ME7960, Sect. 007 Lect. 6: Device Design I Spring 2009 Prof. William Provancher Prof. Jake Abbott University of Utah Salt Lake City, UT USA Today s Class Haptic Device Review (be sure to review
Haptics ME7960, Sect. 007 Lect. 6: Device Design I Spring 2009 Prof. William Provancher Prof. Jake Abbott University of Utah Salt Lake City, UT USA Today s Class Haptic Device Review (be sure to review