Robot Hands: Mechanics, Contact Constraints, and Design for Open-loop Performance
|
|
|
- Barry Gibbs
- 5 years ago
- Views:
Transcription
1 Robot Hands: Mechanics, Contact Constraints, and Design for Open-loop Performance Aaron M. Dollar John J. Lee Associate Professor of Mechanical Engineering and Materials Science






2 Aerial Robotics Yale GRAB Lab Robotic Grasping and Manipulation Human Manipulation Active Cells Mechanisms and Theory Rehabilitation Robotics Upper-limb Prosthetics

3 Aerial Robotics Yale GRAB Lab Robotic Grasping and Manipulation Human Manipulation Active Cells Mechanisms and Theory Rehabilitation Robotics Upper-limb Prosthetics
4 Our Approach Develop hands optimized for open-loop operation, in the presence of uncertainty
5 Our Approach Develop hands optimized for open-loop operation, in the presence of uncertainty Incorporate mechanical features for passive adaptability to object shape, size, position Compliance and Differentials
6 Our Approach Develop hands optimized for open-loop operation, in the presence of uncertainty Incorporate mechanical features for passive adaptability to object shape, size, position Compliance and Differentials Mechanical Intelligence
7 Our Approach Why design for open-loop performance? Lays the foundation for best performance Prevents relying on crutches Prioritizes simplicity, robustness
8 Our Approach Why design for open-loop performance? Lays the foundation for best performance Prevents relying on crutches Prioritizes simplicity, robustness Addition of sensing can then be used to make performance even better
9 Some Practical Challenges for Grasping and Manipulation Variability in objects/properties is enormous Sensing is generally poor, expensive, fragile There is ALWAYS going to be some amount of uncertainty Controlled contact/forces in the presence of sensing errors is difficult
10 Rigid on Rigid Bad Idea* Controlled contact between stiff structures is very difficult Vibrations/oscillations Poor control of force Primary reason: Overconstraint Contact creates closed chain No free or underconstrained DOFs Something has to break * Unless absolutely required by strength/precision needs

11 Rigid on Rigid Bad Idea* Engineered world is mostly stiff Facilitate contact via: Compliance ( soft constraint Passive DOFs Underactuated mechanisms * Unless absolutely required by strength/precision needs
12 Compliance for Stability Reduce contact instabilities due to position errors/vibration Help ensure and distribute contact Small motions minimally affect contact/force Roboticists have long proposed/been using compliant coverings on fingers Salisbury Hand Shimoga and Goldenberg > Only good for small errors (~1mm)
 power task Energy")


13 Compliance for Stability Contact is a zero (mechanical) power task Energy from velocities/accelerations has to go somewhere! Must generally be absorbed by the structure Facilitates implementation of damping Vibration isolation



14 Compliance for Adaptability Allows passive conforming to contact No sensing and control required Lower precision required Passive disturbance rejection On the order of ~3cm RHex [Bob Full, Berkeley]


15 Adaptability++ Differential Transmissions E.g. Automotive Differential Allows your wheels to spin at different rates Passively specified by curvature of turning Differentials = Underactuated Mechanisms
16 Adaptability++ Differential Transmissions Both compliance and differential transmissions add DOFs Compliant DOFs are constrained by F=kx Differentials can be completely unconstrained N.B.: Biology uses both Compliance in mechanical structure, coverings Tendons often cross multiple joints Differential transmissions Whole structure is not generally underactuated

17 SDM Hand (PhD work) 4 fingers 8 joints 1 actuator Open-loop control
18 Stiff links Soft fingerpad 2cm Hollow cable raceway Compliant joint Tendon cable

19 Tendon Actuation Scheme Equal tension on all fingers Regardless of position, contact Highly Adaptive!
20 Tendon Actuation Scheme Equal tension on all fingers Regardless of position, contact Highly Adaptive!
21 Teleoperation
22 Moving Past Power Grasps Grasping assembling object to arm Power Grasping wrap grasp Used for large objects/high forces Precision Grasping fingertip grasp Used for small objects/precise positioning Within-hand manipulation moving object w.r.t. hand base Via finger individualization
23 Moving Past Power Grasps Add dexterity to SDM-type hands without sacrificing grasping performance Keep it simple Small number of actuators, optimize openloop performance
24 Underactuated Mechanisms: Challenges/Opportunities Key property: Un/Underconstrained DOFs Must constrain them for system (static) stability Constrained via contacts Soft contraints via springs System moves towards elastic average/equilibrium
25 Moving Past Power Grasps Grasping assembling object to arm Power Grasping wrap grasp Used for large objects/high forces Precision Grasping fingertip grasp Used for small objects/precise positioning Within-hand manipulation moving object w.r.t. hand base Via finger individualization
26 Underactuated Precision Grasping Main idea: Use environmental contacts at fingertips to exactly constrain system Surfaces used as affordances to guide motion Object may move to elastic equilibrium after those constraints are removed Performance bonus: Adaptability to hard surface constraints

27 Using environmental constraints

28 This primitive is object-agnostic!
29 Moving Past Power Grasps Grasping assembling object to arm Power Grasping wrap grasp Used for large objects/high forces Precision Grasping fingertip grasp Used for small objects/precise positioning Within-hand manipulation moving object w.r.t. hand base Via finger individualization
30 Within-Hand (Dexterous) Manipulation Main idea: Contacts and actuation from other fingers provides constraints Either exactly constrained or underconstrained Challenge: Not OVER constraining the system when manipulating the object


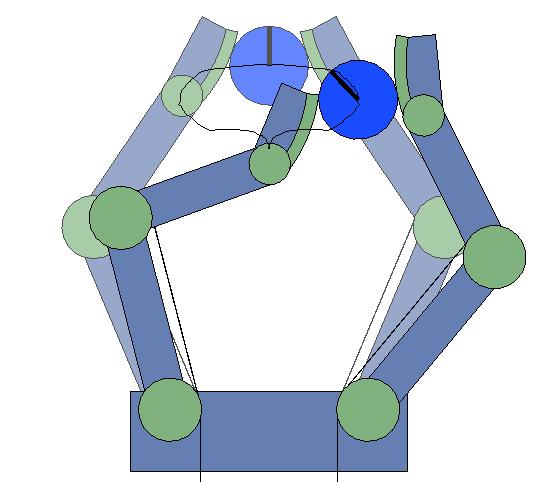
31 Parallel Platforms All practical parallel platforms are exactly constrained Neither under- nor over-constrained Stewart: 6 DOF/Actuators Delta: 3 DOF/Actuators
32 Parallel Platforms Challenge: All legs must/will have same mobility as the platform Makes hand design challenging as they must stand alone Solution: Underactuated Mechanisms Allow fingers to be fully articulated without being fully constrained 1 DOF of manipulation for every 1 hand actuator

33 Planar Precision Manipulation



34 Design for Dexterous Manipulation Dexterous manipulation is a closed kinematic chain Can be modeled as a parallel manipulator Deep research literature

35 Dexterous Manipulation
36 DARPA ARM Program Three Hand teams (Hardware Track) irobot/yale/harvard SRI/MEKA/Stanford Sandia/Stanford Cut down after 2 years to 1 winner Supply hands for additional DARPA projects












37 Dr. Robert Kohout Prof. Rob Howe Prof. Aaron Dollar Mark Claffee Nick Corson Dr. Erik Steltz Leif Jentoft Dr. Yaroslav Tenzer Dr. Lael Odhner Raymond Ma



38 Base Rotation Coupled to Enable Grasp Configurations Dexterous Thumb 2 Actuated Tendons Grasper Fingers 1 Actuated Tendon Each Pinch Grasp Power Grasp Grasper Fingers form Compliant Fingertip Grasp Fingers Interlace for Power Grasp
39




40 Those hands now on DARPA ARM-H/ DRC Robots




41 Yale OpenHand Project All our experimental hand projects now use similar rapidly prototyped designs Why not start releasing hands for free?

42
43 Human Grasping
44 Human Grasp Use Head-mounted cameras on human subjects Investigated grasp frequency and object/task properties
45 Dexterous Manipulation Taxonomy General-purpose, complete* taxonomy for classifying hand use

46 Human Precision Manipulation Measuring workspace of fingertip-based manipulation

, and Lael Odhner")

47 We started a company! Ok mostly Leif Jentoft (Harvard), Yaro Tenzer (Harvard), and Lael Odhner (Yale) ReFlex Hand Version of ur DARPA ARM/DRC hand
48 Acknowledgments Funding for the presented work NSF CAREER Office of Naval Research DARPA (Advancing Robotic Manipulation) GRAB Lab Staff who did the work: Lael Odhner, Raymond Ma, Julia Borras-Sol, Ian Bullock, Thomas Feix Questions?
49 Motivation Not all grasps are created equally [Bullock et. Al, TOH 2013]
50 Motivation Not all grasps are created equally Which grasps are the most important? [Zheng and Dollar, ICRA 2011]



51 Protocol Head-mounted camera w/wide angle lens [Zheng and Dollar, ICRA 2011]
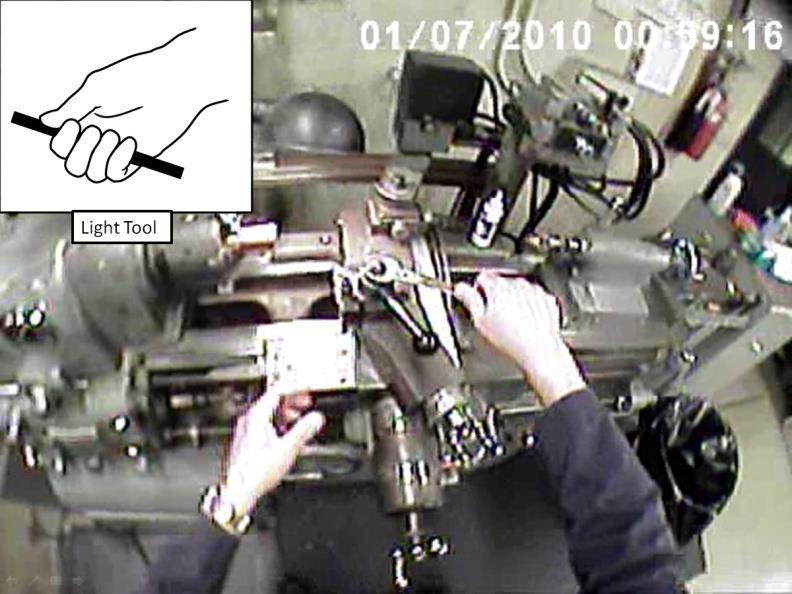
52 Tested professionals: 2 Housekeepers 2 Machinists Protocol 7.5 hours of video analyzed each Subjects performed common, non-repetitive tasks
53 Results
54 Top 10




55 Examples: Housekeeper



56 Examples: Machinist

57 Grasp Class results Results
58 Results
An Underactuated Hand for Efficient Finger-Gaiting-Based Dexterous Manipulation
 Proceedings of the 2014 IEEE International Conference on Robotics and Biomimetics December 5-10, 2014, Bali, Indonesia An Underactuated Hand for Efficient Finger-Gaiting-Based Dexterous Manipulation Raymond
Proceedings of the 2014 IEEE International Conference on Robotics and Biomimetics December 5-10, 2014, Bali, Indonesia An Underactuated Hand for Efficient Finger-Gaiting-Based Dexterous Manipulation Raymond
A Compliant, Underactuated Hand for Robust Manipulation
 A Compliant, Underactuated Hand for Robust Manipulation Lael U. Odhner 1*, Leif P. Jentoft 2, Mark R. Claffee 3, Nicholas Corson 3, Yaroslav Tenzer 2, Raymond R. Ma 1, Martin Buehler 3, Robert Kohout 3,Robert
A Compliant, Underactuated Hand for Robust Manipulation Lael U. Odhner 1*, Leif P. Jentoft 2, Mark R. Claffee 3, Nicholas Corson 3, Yaroslav Tenzer 2, Raymond R. Ma 1, Martin Buehler 3, Robert Kohout 3,Robert
On the Variability of Tactile Signals During Grasping
 On the Variability of Tactile Signals During Grasping Qian Wan * and Robert D. Howe * * Harvard School of Engineering and Applied Sciences, Cambridge, USA Centre for Intelligent Systems Research, Deakin
On the Variability of Tactile Signals During Grasping Qian Wan * and Robert D. Howe * * Harvard School of Engineering and Applied Sciences, Cambridge, USA Centre for Intelligent Systems Research, Deakin
Proprioception & force sensing
 Proprioception & force sensing Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jussi Rantala, Jukka
Proprioception & force sensing Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jussi Rantala, Jukka
A Metal Manicure: The ihy hand picks up a ball bearing from a tabletop, using its fingernails. These thin metal plates let it scoop small items off
 A Metal Manicure: The ihy hand picks up a ball bearing from a tabletop, using its fingernails. These thin metal plates let it scoop small items off flat surfaces and form a cage to hold them. 42 dec 2014
A Metal Manicure: The ihy hand picks up a ball bearing from a tabletop, using its fingernails. These thin metal plates let it scoop small items off flat surfaces and form a cage to hold them. 42 dec 2014
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Classifying Human Manipulation Behavior
 2011 IEEE International Conference on Rehabilitation Robotics Rehab Week Zurich, ETH Zurich Science City, Switzerland, June 29 - July 1, 2011 Classifying Human Manipulation Behavior Ian M. Bullock and
2011 IEEE International Conference on Rehabilitation Robotics Rehab Week Zurich, ETH Zurich Science City, Switzerland, June 29 - July 1, 2011 Classifying Human Manipulation Behavior Ian M. Bullock and
Soft Bionics Hands with a Sense of Touch Through an Electronic Skin
 Soft Bionics Hands with a Sense of Touch Through an Electronic Skin Mahmoud Tavakoli, Rui Pedro Rocha, João Lourenço, Tong Lu and Carmel Majidi Abstract Integration of compliance into the Robotics hands
Soft Bionics Hands with a Sense of Touch Through an Electronic Skin Mahmoud Tavakoli, Rui Pedro Rocha, João Lourenço, Tong Lu and Carmel Majidi Abstract Integration of compliance into the Robotics hands
Design of a Compliant and Force Sensing Hand for a Humanoid Robot
 Design of a Compliant and Force Sensing Hand for a Humanoid Robot Aaron Edsinger-Gonzales Computer Science and Artificial Intelligence Laboratory, assachusetts Institute of Technology E-mail: edsinger@csail.mit.edu
Design of a Compliant and Force Sensing Hand for a Humanoid Robot Aaron Edsinger-Gonzales Computer Science and Artificial Intelligence Laboratory, assachusetts Institute of Technology E-mail: edsinger@csail.mit.edu
Open-Source, Affordable, Modular, Light-Weight, Underactuated Robot Hands
 Open-Source, Affordable, Modular, Light-Weight, Underactuated Robot Hands Agisilaos G. Zisimatos, Minas V. Liarokapis, Christoforos I. Mavrogiannis and Kostas J. Kyriakopoulos Abstract In this paper we
Open-Source, Affordable, Modular, Light-Weight, Underactuated Robot Hands Agisilaos G. Zisimatos, Minas V. Liarokapis, Christoforos I. Mavrogiannis and Kostas J. Kyriakopoulos Abstract In this paper we
Shuguang Huang, Ph.D Research Assistant Professor Department of Mechanical Engineering Marquette University Milwaukee, WI
 Shuguang Huang, Ph.D Research Assistant Professor Department of Mechanical Engineering Marquette University Milwaukee, WI 53201 huangs@marquette.edu RESEARCH INTEREST: Dynamic systems. Analysis and physical
Shuguang Huang, Ph.D Research Assistant Professor Department of Mechanical Engineering Marquette University Milwaukee, WI 53201 huangs@marquette.edu RESEARCH INTEREST: Dynamic systems. Analysis and physical
A Compliant, Underactuated Hand for Robust Manipulation
 A Compliant, Underactuated Hand for Robust Manipulation Lael U. Odhner 1*, Leif P. Jentoft 2, Mark R. Claffee 3, Nicholas Corson 3, Yaroslav Tenzer 2, Raymond R. Ma 1, Martin Buehler 3, Robert Kohout 3,Robert
A Compliant, Underactuated Hand for Robust Manipulation Lael U. Odhner 1*, Leif P. Jentoft 2, Mark R. Claffee 3, Nicholas Corson 3, Yaroslav Tenzer 2, Raymond R. Ma 1, Martin Buehler 3, Robert Kohout 3,Robert
Aaron M. Dollar Updated 7/6/17
 Aaron M. Dollar Updated 7/6/17 15 Prospect St. Becton 215 New Haven, CT 06511 Office - (203) 436-9122 aaron.dollar@yale.edu http://www.eng.yale.edu/grablab/ PROFESSIONAL EXPERIENCE Yale University Associate
Aaron M. Dollar Updated 7/6/17 15 Prospect St. Becton 215 New Haven, CT 06511 Office - (203) 436-9122 aaron.dollar@yale.edu http://www.eng.yale.edu/grablab/ PROFESSIONAL EXPERIENCE Yale University Associate
Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue
Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue
Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular
Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular
Laboratory Mini-Projects Summary
 ME 4290/5290 Mechanics & Control of Robotic Manipulators Dr. Bob, Fall 2017 Robotics Laboratory Mini-Projects (LMP 1 8) Laboratory Exercises: The laboratory exercises are to be done in teams of two (or
ME 4290/5290 Mechanics & Control of Robotic Manipulators Dr. Bob, Fall 2017 Robotics Laboratory Mini-Projects (LMP 1 8) Laboratory Exercises: The laboratory exercises are to be done in teams of two (or
CAPACITIES FOR TECHNOLOGY TRANSFER
 CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Politecnico di Milano - Dipartimento di Elettronica, Informazione e Bioingegneria Industrial robotics
Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Politecnico di Milano - Dipartimento di Elettronica, Informazione e Bioingegneria Industrial robotics
Robotic Capture and De-Orbit of a Tumbling and Heavy Target from Low Earth Orbit
 www.dlr.de Chart 1 Robotic Capture and De-Orbit of a Tumbling and Heavy Target from Low Earth Orbit Steffen Jaekel, R. Lampariello, G. Panin, M. Sagardia, B. Brunner, O. Porges, and E. Kraemer (1) M. Wieser,
www.dlr.de Chart 1 Robotic Capture and De-Orbit of a Tumbling and Heavy Target from Low Earth Orbit Steffen Jaekel, R. Lampariello, G. Panin, M. Sagardia, B. Brunner, O. Porges, and E. Kraemer (1) M. Wieser,
Grasp Mapping Between a 3-Finger Haptic Device and a Robotic Hand
 Grasp Mapping Between a 3-Finger Haptic Device and a Robotic Hand Francisco Suárez-Ruiz 1, Ignacio Galiana 1, Yaroslav Tenzer 2,3, Leif P. Jentoft 2,3, Robert D. Howe 2, and Manuel Ferre 1 1 Centre for
Grasp Mapping Between a 3-Finger Haptic Device and a Robotic Hand Francisco Suárez-Ruiz 1, Ignacio Galiana 1, Yaroslav Tenzer 2,3, Leif P. Jentoft 2,3, Robert D. Howe 2, and Manuel Ferre 1 1 Centre for
arxiv: v1 [cs.ro] 30 Jul 2018
![arxiv: v1 [cs.ro] 30 Jul 2018](/thumbs/88/117267692.jpg "arxiv: v1 [cs.ro] 30 Jul 2018") A Double Jaw Hand Designed for Multi-object Assembly Joshua C. Triyonoputro 1, Weiwei Wan 1,2,, Kensuke Harada 1,2 arxiv:1807.11345v1 [cs.ro] 30 Jul 2018 Abstract This paper presents a double jaw hand
A Double Jaw Hand Designed for Multi-object Assembly Joshua C. Triyonoputro 1, Weiwei Wan 1,2,, Kensuke Harada 1,2 arxiv:1807.11345v1 [cs.ro] 30 Jul 2018 Abstract This paper presents a double jaw hand
Department of Robotics Ritsumeikan University
 Department of Robotics Ritsumeikan University Shinichi Hirai Dept. Robotics Ritsumeikan Univ. Hanoi Institute of Technology Hanoi, Vietnam, Dec. 20, 2008 http://www.ritsumei.ac.jp/se/rm/robo/index-e.htm
Department of Robotics Ritsumeikan University Shinichi Hirai Dept. Robotics Ritsumeikan Univ. Hanoi Institute of Technology Hanoi, Vietnam, Dec. 20, 2008 http://www.ritsumei.ac.jp/se/rm/robo/index-e.htm
The design and making of a humanoid robotic hand
 The design and making of a humanoid robotic hand presented by Tian Li Research associate Supervisor s Name: Prof. Nadia Magnenat Thalmann,Prof. Daniel Thalmann & Prof. Jianmin Zheng Project 2: Mixed Society
The design and making of a humanoid robotic hand presented by Tian Li Research associate Supervisor s Name: Prof. Nadia Magnenat Thalmann,Prof. Daniel Thalmann & Prof. Jianmin Zheng Project 2: Mixed Society
Introduction To Robotics (Kinematics, Dynamics, and Design)
") Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
Sustainable & Intelligent Robotics Group Projects
 Machine learning for robotic grasping Hyb-Re glove for hand rehabilitation Hyb-Knee for gait augmentation Colonoscopy view range expansion device Sustainable & Intelligent Robotics Group Projects Supervisor:
Machine learning for robotic grasping Hyb-Re glove for hand rehabilitation Hyb-Knee for gait augmentation Colonoscopy view range expansion device Sustainable & Intelligent Robotics Group Projects Supervisor:
Introduction to Robotics
 Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-3470 Introduction to Robotics Robotica for Computer Engineering students A.A.
Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-3470 Introduction to Robotics Robotica for Computer Engineering students A.A.
On Observer-based Passive Robust Impedance Control of a Robot Manipulator
 Journal of Mechanics Engineering and Automation 7 (2017) 71-78 doi: 10.17265/2159-5275/2017.02.003 D DAVID PUBLISHING On Observer-based Passive Robust Impedance Control of a Robot Manipulator CAO Sheng,
Journal of Mechanics Engineering and Automation 7 (2017) 71-78 doi: 10.17265/2159-5275/2017.02.003 D DAVID PUBLISHING On Observer-based Passive Robust Impedance Control of a Robot Manipulator CAO Sheng,
Parallel Robot Projects at Ohio University
 Parallel Robot Projects at Ohio University Robert L. Williams II with graduate students: John Hall, Brian Hopkins, Atul Joshi, Josh Collins, Jigar Vadia, Dana Poling, and Ron Nyzen And Special Thanks to:
Parallel Robot Projects at Ohio University Robert L. Williams II with graduate students: John Hall, Brian Hopkins, Atul Joshi, Josh Collins, Jigar Vadia, Dana Poling, and Ron Nyzen And Special Thanks to:
ADVANCED CABLE-DRIVEN SENSING ARTIFICIAL HANDS FOR EXTRA VEHICULAR AND EXPLORATION ACTIVITIES
 In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 ADVANCED CABLE-DRIVEN SENSING ARTIFICIAL
In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 ADVANCED CABLE-DRIVEN SENSING ARTIFICIAL
Towards the Development of a Minimal Anthropomorphic Robot Hand
 2014 14th IEEE-RAS International Conference on Humanoid Robots (Humanoids) November 18-20, 2014. Madrid, Spain Towards the Development of a Minimal Anthropomorphic Robot Hand Donald Dalli, Student Member,
2014 14th IEEE-RAS International Conference on Humanoid Robots (Humanoids) November 18-20, 2014. Madrid, Spain Towards the Development of a Minimal Anthropomorphic Robot Hand Donald Dalli, Student Member,
FORCE FEEDBACK. Roope Raisamo
 FORCE FEEDBACK Roope Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere, Finland Outline Force feedback interfaces
FORCE FEEDBACK Roope Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere, Finland Outline Force feedback interfaces
ROMEO Humanoid for Action and Communication. Rodolphe GELIN Aldebaran Robotics
 ROMEO Humanoid for Action and Communication Rodolphe GELIN Aldebaran Robotics 7 th workshop on Humanoid November Soccer 2012 Robots Osaka, November 2012 Overview French National Project labeled by Cluster
ROMEO Humanoid for Action and Communication Rodolphe GELIN Aldebaran Robotics 7 th workshop on Humanoid November Soccer 2012 Robots Osaka, November 2012 Overview French National Project labeled by Cluster
LASA I PRESS KIT lasa.epfl.ch I EPFL-STI-IMT-LASA Station 9 I CH 1015, Lausanne, Switzerland
 LASA I PRESS KIT 2016 LASA I OVERVIEW LASA (Learning Algorithms and Systems Laboratory) at EPFL, focuses on machine learning applied to robot control, humanrobot interaction and cognitive robotics at large.
LASA I PRESS KIT 2016 LASA I OVERVIEW LASA (Learning Algorithms and Systems Laboratory) at EPFL, focuses on machine learning applied to robot control, humanrobot interaction and cognitive robotics at large.
Lecture Notes in Control and Information Sciences 233. Editor: M. Thoma
 Lecture Notes in Control and Information Sciences 233 Editor: M. Thoma Pasquale Chiacchio and Stefano Chiaverini (Eds) Complex Robotic Systems ~ Springer Series Advisory Board A. Bensoussan M.J. Grimble
Lecture Notes in Control and Information Sciences 233 Editor: M. Thoma Pasquale Chiacchio and Stefano Chiaverini (Eds) Complex Robotic Systems ~ Springer Series Advisory Board A. Bensoussan M.J. Grimble
Ensuring the Safety of an Autonomous Robot in Interaction with Children
 Machine Learning in Robot Assisted Therapy Ensuring the Safety of an Autonomous Robot in Interaction with Children Challenges and Considerations Stefan Walke stefan.walke@tum.de SS 2018 Overview Physical
Machine Learning in Robot Assisted Therapy Ensuring the Safety of an Autonomous Robot in Interaction with Children Challenges and Considerations Stefan Walke stefan.walke@tum.de SS 2018 Overview Physical
Adaptive Legged Robots Through Exactly Constrained and Non-Redundant Design
 Received March 27, 2017, accepted April 21, 2017, date of publication May 12, 2017, date of current version July 3, 2017. Digital Object Identifier 10.1109/ACCESS.2017.2704088 Adaptive Legged Robots Through
Received March 27, 2017, accepted April 21, 2017, date of publication May 12, 2017, date of current version July 3, 2017. Digital Object Identifier 10.1109/ACCESS.2017.2704088 Adaptive Legged Robots Through
Introduction To Robotics Analysis Systems Applications
 We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online or by storing it on your computer, you have convenient answers with introduction to robotics
We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online or by storing it on your computer, you have convenient answers with introduction to robotics
FROM TORQUE-CONTROLLED TO INTRINSICALLY COMPLIANT
 FROM TORQUE-CONTROLLED TO INTRINSICALLY COMPLIANT HUMANOID by Christian Ott 1 Alexander Dietrich Daniel Leidner Alexander Werner Johannes Englsberger Bernd Henze Sebastian Wolf Maxime Chalon Werner Friedl
FROM TORQUE-CONTROLLED TO INTRINSICALLY COMPLIANT HUMANOID by Christian Ott 1 Alexander Dietrich Daniel Leidner Alexander Werner Johannes Englsberger Bernd Henze Sebastian Wolf Maxime Chalon Werner Friedl
Peter Berkelman. ACHI/DigitalWorld
 Magnetic Levitation Haptic Peter Berkelman ACHI/DigitalWorld February 25, 2013 Outline: Haptics - Force Feedback Sample devices: Phantoms, Novint Falcon, Force Dimension Inertia, friction, hysteresis/backlash
Magnetic Levitation Haptic Peter Berkelman ACHI/DigitalWorld February 25, 2013 Outline: Haptics - Force Feedback Sample devices: Phantoms, Novint Falcon, Force Dimension Inertia, friction, hysteresis/backlash
2. Introduction to Computer Haptics
 2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
Robotics Manipulation and control. University of Strasbourg Telecom Physique Strasbourg, ISAV option Master IRIV, AR track Jacques Gangloff
 Robotics Manipulation and control University of Strasbourg Telecom Physique Strasbourg, ISAV option Master IRIV, AR track Jacques Gangloff Outline of the lecture Introduction : Overview 1. Theoretical
Robotics Manipulation and control University of Strasbourg Telecom Physique Strasbourg, ISAV option Master IRIV, AR track Jacques Gangloff Outline of the lecture Introduction : Overview 1. Theoretical
All theses offered at MERLIN (November 2017)
") All theses offered at MERLIN (November 2017) MSc theses at Politecnico di Milano Thesis with reviewer Thesis without reviewer ( tesina ) Expected effort 6 months full time 3 4 months full time Reviewer
All theses offered at MERLIN (November 2017) MSc theses at Politecnico di Milano Thesis with reviewer Thesis without reviewer ( tesina ) Expected effort 6 months full time 3 4 months full time Reviewer
Shape Memory Alloy Actuator Controller Design for Tactile Displays
 34th IEEE Conference on Decision and Control New Orleans, Dec. 3-5, 995 Shape Memory Alloy Actuator Controller Design for Tactile Displays Robert D. Howe, Dimitrios A. Kontarinis, and William J. Peine
34th IEEE Conference on Decision and Control New Orleans, Dec. 3-5, 995 Shape Memory Alloy Actuator Controller Design for Tactile Displays Robert D. Howe, Dimitrios A. Kontarinis, and William J. Peine
Design and Control of the BUAA Four-Fingered Hand
 Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Design and Control of the BUAA Four-Fingered Hand Y. Zhang, Z. Han, H. Zhang, X. Shang, T. Wang,
Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Design and Control of the BUAA Four-Fingered Hand Y. Zhang, Z. Han, H. Zhang, X. Shang, T. Wang,
Introduction of Research Activity in Mechanical Systems Design Laboratory (Takeda s Lab) in Tokyo Tech
 in Tokyo Tech") Introduction of Research Activity in Mechanical Systems Design Laboratory (Takeda s Lab) in Tokyo Tech Kinematic design of asymmetrical position-orientation decoupled parallel mechanism with 5 dof Pipe
Introduction of Research Activity in Mechanical Systems Design Laboratory (Takeda s Lab) in Tokyo Tech Kinematic design of asymmetrical position-orientation decoupled parallel mechanism with 5 dof Pipe
Why Humanoid Robots?*
 Why Humanoid Robots?* AJLONTECH * Largely adapted from Carlos Balaguer s talk in IURS 06 Outline Motivation What is a Humanoid Anyway? History of Humanoid Robots Why Develop Humanoids? Challenges in Humanoids
Why Humanoid Robots?* AJLONTECH * Largely adapted from Carlos Balaguer s talk in IURS 06 Outline Motivation What is a Humanoid Anyway? History of Humanoid Robots Why Develop Humanoids? Challenges in Humanoids
4R and 5R Parallel Mechanism Mobile Robots
 4R and 5R Parallel Mechanism Mobile Robots Tasuku Yamawaki Department of Mechano-Micro Engineering Tokyo Institute of Technology 4259 Nagatsuta, Midoriku Yokohama, Kanagawa, Japan Email: d03yamawaki@pms.titech.ac.jp
4R and 5R Parallel Mechanism Mobile Robots Tasuku Yamawaki Department of Mechano-Micro Engineering Tokyo Institute of Technology 4259 Nagatsuta, Midoriku Yokohama, Kanagawa, Japan Email: d03yamawaki@pms.titech.ac.jp
Modeling and Experimental Studies of a Novel 6DOF Haptic Device
 Proceedings of The Canadian Society for Mechanical Engineering Forum 2010 CSME FORUM 2010 June 7-9, 2010, Victoria, British Columbia, Canada Modeling and Experimental Studies of a Novel DOF Haptic Device
Proceedings of The Canadian Society for Mechanical Engineering Forum 2010 CSME FORUM 2010 June 7-9, 2010, Victoria, British Columbia, Canada Modeling and Experimental Studies of a Novel DOF Haptic Device
Les apports de la robotique collaborative en santé
 Les apports de la robotique collaborative en santé Guillaume Morel Institut des Systèmes Intelligents et de Robotique Université Pierre et Marie Curie, CNRS UMR 7222 INSERM U1150 Assistance aux Gestes
Les apports de la robotique collaborative en santé Guillaume Morel Institut des Systèmes Intelligents et de Robotique Université Pierre et Marie Curie, CNRS UMR 7222 INSERM U1150 Assistance aux Gestes
On-Line Interactive Dexterous Grasping
 On-Line Interactive Dexterous Grasping Matei T. Ciocarlie and Peter K. Allen Columbia University, New York, USA {cmatei,allen}@columbia.edu Abstract. In this paper we describe a system that combines human
On-Line Interactive Dexterous Grasping Matei T. Ciocarlie and Peter K. Allen Columbia University, New York, USA {cmatei,allen}@columbia.edu Abstract. In this paper we describe a system that combines human
Humanoid Hands. CHENG Gang Dec Rollin Justin Robot.mp4
 Humanoid Hands CHENG Gang Dec. 2009 Rollin Justin Robot.mp4 Behind the Video Motivation of humanoid hand Serve the people whatever difficult Behind the Video Challenge to humanoid hand Dynamics How to
Humanoid Hands CHENG Gang Dec. 2009 Rollin Justin Robot.mp4 Behind the Video Motivation of humanoid hand Serve the people whatever difficult Behind the Video Challenge to humanoid hand Dynamics How to
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics is the study and design of robots Robots can be used in different contexts and are classified as 1. Industrial robots
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics is the study and design of robots Robots can be used in different contexts and are classified as 1. Industrial robots
Bruno Siciliano Luigi Villani Vincenzo Lippiello. Francesca Cordella Mariacarla Staffa.
 1/20 Robotics @ PRISMA Lab Bruno Siciliano Luigi Villani Vincenzo Lippiello Fanny Ficuciello i Fabio Ruggiero Francesca Cordella Mariacarla Staffa www.prisma.unina.it i it 18 February 2010 City 1,200,000
1/20 Robotics @ PRISMA Lab Bruno Siciliano Luigi Villani Vincenzo Lippiello Fanny Ficuciello i Fabio Ruggiero Francesca Cordella Mariacarla Staffa www.prisma.unina.it i it 18 February 2010 City 1,200,000
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute State one reason for investigating and building humanoid robot (4 pts) List two
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute State one reason for investigating and building humanoid robot (4 pts) List two
Information and Program
 Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
World Automation Congress
 ISORA028 Main Menu World Automation Congress Tenth International Symposium on Robotics with Applications Seville, Spain June 28th-July 1st, 2004 Design And Experiences With DLR Hand II J. Butterfaß, M.
ISORA028 Main Menu World Automation Congress Tenth International Symposium on Robotics with Applications Seville, Spain June 28th-July 1st, 2004 Design And Experiences With DLR Hand II J. Butterfaß, M.
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics studies robots For history and definitions see the 2013 slides http://www.ladispe.polito.it/corsi/meccatronica/01peeqw/2014-15/slides/robotics_2013_01_a_brief_history.pdf
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics studies robots For history and definitions see the 2013 slides http://www.ladispe.polito.it/corsi/meccatronica/01peeqw/2014-15/slides/robotics_2013_01_a_brief_history.pdf
Biologically Inspired Robot Manipulator for New Applications in Automation Engineering
 Preprint of the paper which appeared in the Proc. of Robotik 2008, Munich, Germany, June 11-12, 2008 Biologically Inspired Robot Manipulator for New Applications in Automation Engineering Dipl.-Biol. S.
Preprint of the paper which appeared in the Proc. of Robotik 2008, Munich, Germany, June 11-12, 2008 Biologically Inspired Robot Manipulator for New Applications in Automation Engineering Dipl.-Biol. S.
Elements of Haptic Interfaces
 Elements of Haptic Interfaces Katherine J. Kuchenbecker Department of Mechanical Engineering and Applied Mechanics University of Pennsylvania kuchenbe@seas.upenn.edu Course Notes for MEAM 625, University
Elements of Haptic Interfaces Katherine J. Kuchenbecker Department of Mechanical Engineering and Applied Mechanics University of Pennsylvania kuchenbe@seas.upenn.edu Course Notes for MEAM 625, University
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) Explain the difference between navigation using visibility map and potential
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) Explain the difference between navigation using visibility map and potential
Wireless Robust Robots for Application in Hostile Agricultural. environment.
 Wireless Robust Robots for Application in Hostile Agricultural Environment A.R. Hirakawa, A.M. Saraiva, C.E. Cugnasca Agricultural Automation Laboratory, Computer Engineering Department Polytechnic School,
Wireless Robust Robots for Application in Hostile Agricultural Environment A.R. Hirakawa, A.M. Saraiva, C.E. Cugnasca Agricultural Automation Laboratory, Computer Engineering Department Polytechnic School,
A New Approach to the Design and Verification of Complex Systems
 A New Approach to the Design and Verification of Complex Systems Research Scientist Palo Alto Research Center Intelligent Systems Laboratory Embedded Reasoning Area Tolga Kurtoglu, Ph.D. Complexity Highly
A New Approach to the Design and Verification of Complex Systems Research Scientist Palo Alto Research Center Intelligent Systems Laboratory Embedded Reasoning Area Tolga Kurtoglu, Ph.D. Complexity Highly
FALL 2014, Issue No. 32 ROBOTICS AT OUR FINGERTIPS
 FALL 2014, Issue No. 32 ROBOTICS AT OUR FINGERTIPS FALL 2014 Issue No. 32 12 CYBERSECURITY SOLUTION NSF taps UCLA Engineering to take lead in encryption research. Cover Photo: Joanne Leung 6MAN AND MACHINE
FALL 2014, Issue No. 32 ROBOTICS AT OUR FINGERTIPS FALL 2014 Issue No. 32 12 CYBERSECURITY SOLUTION NSF taps UCLA Engineering to take lead in encryption research. Cover Photo: Joanne Leung 6MAN AND MACHINE
NAIST Openhand M2S: A versatile two-finger gripper adapted for pulling and tucking textiles
 2017 First IEEE International Conference on Robotic Computing NAIST Openhand M2S: A versatile two-finger gripper adapted for pulling and tucking textiles Felix von Drigalski, Daiki Yoshioka, Wataru Yamazaki,
2017 First IEEE International Conference on Robotic Computing NAIST Openhand M2S: A versatile two-finger gripper adapted for pulling and tucking textiles Felix von Drigalski, Daiki Yoshioka, Wataru Yamazaki,
Force feedback interfaces & applications
 Force feedback interfaces & applications Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jukka Raisamo,
Force feedback interfaces & applications Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jukka Raisamo,
Computer Assisted Medical Interventions
 Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
PICK AND PLACE HUMANOID ROBOT USING RASPBERRY PI AND ARDUINO FOR INDUSTRIAL APPLICATIONS
 PICK AND PLACE HUMANOID ROBOT USING RASPBERRY PI AND ARDUINO FOR INDUSTRIAL APPLICATIONS Bernard Franklin 1, Sachin.P 2, Jagadish.S 3, Shaista Noor 4, Rajashekhar C. Biradar 5 1,2,3,4,5 School of Electronics
PICK AND PLACE HUMANOID ROBOT USING RASPBERRY PI AND ARDUINO FOR INDUSTRIAL APPLICATIONS Bernard Franklin 1, Sachin.P 2, Jagadish.S 3, Shaista Noor 4, Rajashekhar C. Biradar 5 1,2,3,4,5 School of Electronics
On the Use of Underactuation in Adaptive Robotic Grasping
 James Watt Institute Innovative Manufacturing Research Centre Conference, July 8, 2011-1- On the Use of Underactuation in Adaptive Robotic Grasping Canada Research Chair Département de génie mécanique
James Watt Institute Innovative Manufacturing Research Centre Conference, July 8, 2011-1- On the Use of Underactuation in Adaptive Robotic Grasping Canada Research Chair Département de génie mécanique
MSMS Software for VR Simulations of Neural Prostheses and Patient Training and Rehabilitation
 MSMS Software for VR Simulations of Neural Prostheses and Patient Training and Rehabilitation Rahman Davoodi and Gerald E. Loeb Department of Biomedical Engineering, University of Southern California Abstract.
MSMS Software for VR Simulations of Neural Prostheses and Patient Training and Rehabilitation Rahman Davoodi and Gerald E. Loeb Department of Biomedical Engineering, University of Southern California Abstract.
Dexterous Anthropomorphic Robot Hand With Distributed Tactile Sensor: Gifu Hand II
 296 IEEE/ASME TRANSACTIONS ON MECHATRONICS, VOL. 7, NO. 3, SEPTEMBER 2002 Dexterous Anthropomorphic Robot Hand With Distributed Tactile Sensor: Gifu Hand II Haruhisa Kawasaki, Tsuneo Komatsu, and Kazunao
296 IEEE/ASME TRANSACTIONS ON MECHATRONICS, VOL. 7, NO. 3, SEPTEMBER 2002 Dexterous Anthropomorphic Robot Hand With Distributed Tactile Sensor: Gifu Hand II Haruhisa Kawasaki, Tsuneo Komatsu, and Kazunao
Introduction To Robotics Analysis Systems Applications
 We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online or by storing it on your computer, you have convenient answers with introduction to robotics
We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online or by storing it on your computer, you have convenient answers with introduction to robotics
Dynamic analysis and control of a Hybrid serial/cable driven robot for lower-limb rehabilitation
 Dynamic analysis and control of a Hybrid serial/cable driven robot for lower-limb rehabilitation M. Ismail 1, S. Lahouar 2 and L. Romdhane 1,3 1 Mechanical Laboratory of Sousse (LMS), National Engineering
Dynamic analysis and control of a Hybrid serial/cable driven robot for lower-limb rehabilitation M. Ismail 1, S. Lahouar 2 and L. Romdhane 1,3 1 Mechanical Laboratory of Sousse (LMS), National Engineering
CS277 - Experimental Haptics Lecture 2. Haptic Rendering
 CS277 - Experimental Haptics Lecture 2 Haptic Rendering Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering A note on timing...
CS277 - Experimental Haptics Lecture 2 Haptic Rendering Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering A note on timing...
Journal of Theoretical and Applied Mechanics, Sofia, 2014, vol. 44, No. 1, pp ROBONAUT 2: MISSION, TECHNOLOGIES, PERSPECTIVES
 Journal of Theoretical and Applied Mechanics, Sofia, 2014, vol. 44, No. 1, pp. 97 102 SCIENTIFIC LIFE DOI: 10.2478/jtam-2014-0006 ROBONAUT 2: MISSION, TECHNOLOGIES, PERSPECTIVES Galia V. Tzvetkova Institute
Journal of Theoretical and Applied Mechanics, Sofia, 2014, vol. 44, No. 1, pp. 97 102 SCIENTIFIC LIFE DOI: 10.2478/jtam-2014-0006 ROBONAUT 2: MISSION, TECHNOLOGIES, PERSPECTIVES Galia V. Tzvetkova Institute
IOSR Journal of Engineering (IOSRJEN) e-issn: , p-issn: , Volume 2, Issue 11 (November 2012), PP 37-43
 e-issn: , p-issn: , Volume 2, Issue 11 (November 2012), PP 37-43") IOSR Journal of Engineering (IOSRJEN) e-issn: 2250-3021, p-issn: 2278-8719, Volume 2, Issue 11 (November 2012), PP 37-43 Operative Precept of robotic arm expending Haptic Virtual System Arnab Das 1, Swagat
IOSR Journal of Engineering (IOSRJEN) e-issn: 2250-3021, p-issn: 2278-8719, Volume 2, Issue 11 (November 2012), PP 37-43 Operative Precept of robotic arm expending Haptic Virtual System Arnab Das 1, Swagat
This article presents a new approach to the. The Feel of MEMS Barometers. Inexpensive and Easily Customized Tactile Array Sensors
 The Feel of MEMS Barometers corel Inexpensive and Easily Customized Tactile Array s By Yaroslav Tenzer, Leif P. Jentoft, and Robert D. Howe This article presents a new approach to the construction of tactile
The Feel of MEMS Barometers corel Inexpensive and Easily Customized Tactile Array s By Yaroslav Tenzer, Leif P. Jentoft, and Robert D. Howe This article presents a new approach to the construction of tactile
Haptic Virtual Fixtures for Robot-Assisted Manipulation
 Haptic Virtual Fixtures for Robot-Assisted Manipulation Jake J. Abbott, Panadda Marayong, and Allison M. Okamura Department of Mechanical Engineering, The Johns Hopkins University {jake.abbott, pmarayong,
Haptic Virtual Fixtures for Robot-Assisted Manipulation Jake J. Abbott, Panadda Marayong, and Allison M. Okamura Department of Mechanical Engineering, The Johns Hopkins University {jake.abbott, pmarayong,
IMPLEMENTATION OF ROBOT ARM NETWORKS AND EXPERIMENTAL ANALYSIS OF CONSENSUS-BASED COLLECTIVE MOTION
 IMPLEMENTATION OF ROBOT ARM NETWORKS AND EXPERIMENTAL ANALYSIS OF CONSENSUS-BASED COLLECTIVE MOTION by Daniel Scott Stuart A thesis submitted in partial fulfillment of the requirements for the degree of
IMPLEMENTATION OF ROBOT ARM NETWORKS AND EXPERIMENTAL ANALYSIS OF CONSENSUS-BASED COLLECTIVE MOTION by Daniel Scott Stuart A thesis submitted in partial fulfillment of the requirements for the degree of
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (6 pts )A 2-DOF manipulator arm is attached to a mobile base with non-holonomic
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (6 pts )A 2-DOF manipulator arm is attached to a mobile base with non-holonomic
Chapter 1. Robot and Robotics PP
 Chapter 1 Robot and Robotics PP. 01-19 Modeling and Stability of Robotic Motions 2 1.1 Introduction A Czech writer, Karel Capek, had first time used word ROBOT in his fictional automata 1921 R.U.R (Rossum
Chapter 1 Robot and Robotics PP. 01-19 Modeling and Stability of Robotic Motions 2 1.1 Introduction A Czech writer, Karel Capek, had first time used word ROBOT in his fictional automata 1921 R.U.R (Rossum
Technical Cognitive Systems
 Part XII Actuators 3 Outline Robot Bases Hardware Components Robot Arms 4 Outline Robot Bases Hardware Components Robot Arms 5 (Wheeled) Locomotion Goal: Bring the robot to a desired pose (x, y, θ): (position
Part XII Actuators 3 Outline Robot Bases Hardware Components Robot Arms 4 Outline Robot Bases Hardware Components Robot Arms 5 (Wheeled) Locomotion Goal: Bring the robot to a desired pose (x, y, θ): (position
Robust Haptic Teleoperation of a Mobile Manipulation Platform
 Robust Haptic Teleoperation of a Mobile Manipulation Platform Jaeheung Park and Oussama Khatib Stanford AI Laboratory Stanford University http://robotics.stanford.edu Abstract. This paper presents a new
Robust Haptic Teleoperation of a Mobile Manipulation Platform Jaeheung Park and Oussama Khatib Stanford AI Laboratory Stanford University http://robotics.stanford.edu Abstract. This paper presents a new
AUOTOMATIC PICK AND PLACE ROBOT
 AUOTOMATIC PICK AND PLACE ROBOT Mr.Kunal Sali 1, Mr. Saiprasad Kolhe 2, Mr.Mayank Paliwal 3 1,2,3 Department of E&TC. Engg, Sandip Foundation, SITRC College, Nashik,(India) ABSTRACT In this paper we deal
AUOTOMATIC PICK AND PLACE ROBOT Mr.Kunal Sali 1, Mr. Saiprasad Kolhe 2, Mr.Mayank Paliwal 3 1,2,3 Department of E&TC. Engg, Sandip Foundation, SITRC College, Nashik,(India) ABSTRACT In this paper we deal
ME7752: Mechanics and Control of Robots Lecture 1
 ME7752: Mechanics and Control of Robots Lecture 1 Instructor: Manoj Srinivasan Office: E340 Scott Laboratory Email: srinivasan.88@osu.edu ( PDF posted. In the PDF, if there are no links to videos, do a
ME7752: Mechanics and Control of Robots Lecture 1 Instructor: Manoj Srinivasan Office: E340 Scott Laboratory Email: srinivasan.88@osu.edu ( PDF posted. In the PDF, if there are no links to videos, do a
Performance Issues in Collaborative Haptic Training
 27 IEEE International Conference on Robotics and Automation Roma, Italy, 1-14 April 27 FrA4.4 Performance Issues in Collaborative Haptic Training Behzad Khademian and Keyvan Hashtrudi-Zaad Abstract This
27 IEEE International Conference on Robotics and Automation Roma, Italy, 1-14 April 27 FrA4.4 Performance Issues in Collaborative Haptic Training Behzad Khademian and Keyvan Hashtrudi-Zaad Abstract This
The Design of key mechanical functions for a super multi-dof and extendable Space Robotic Arm
 The Design of key mechanical functions for a super multi-dof and extendable Space Robotic Arm Kent Yoshikawa*, Yuichiro Tanaka**, Mitsushige Oda***, Hiroki Nakanishi**** *Tokyo Institute of Technology,
The Design of key mechanical functions for a super multi-dof and extendable Space Robotic Arm Kent Yoshikawa*, Yuichiro Tanaka**, Mitsushige Oda***, Hiroki Nakanishi**** *Tokyo Institute of Technology,
DESIGN, ACTUATION, AND CONTROL OF A COMPLEX HAND MECHANISM. by Jason Dean Potratz
 DESIGN, ACTUATION, AND CONTROL OF A COMPLEX HAND MECHANISM by Jason Dean Potratz A thesis submitted in partial fulfillment of the requirements for the Master of Science degree in Mechanical Engineering
DESIGN, ACTUATION, AND CONTROL OF A COMPLEX HAND MECHANISM by Jason Dean Potratz A thesis submitted in partial fulfillment of the requirements for the Master of Science degree in Mechanical Engineering
Robotic Swing Drive as Exploit of Stiffness Control Implementation
 Robotic Swing Drive as Exploit of Stiffness Control Implementation Nathan J. Nipper, Johnny Godowski, A. Arroyo, E. Schwartz njnipper@ufl.edu, jgodows@admin.ufl.edu http://www.mil.ufl.edu/~swing Machine
Robotic Swing Drive as Exploit of Stiffness Control Implementation Nathan J. Nipper, Johnny Godowski, A. Arroyo, E. Schwartz njnipper@ufl.edu, jgodows@admin.ufl.edu http://www.mil.ufl.edu/~swing Machine
Humanlike, Task-Specific Reaching and Grasping with Redundant Arms and Low-Complexity Hands
 Humanlike, Task-Specific Reaching and Grasping with Redundant Arms and Low-Complexity Hands Minas V. Liarokapis, Member, IEEE, Aaron M. Dollar, Senior Member, IEEE and Kostas J. Kyriakopoulos Member, IEEE
Humanlike, Task-Specific Reaching and Grasping with Redundant Arms and Low-Complexity Hands Minas V. Liarokapis, Member, IEEE, Aaron M. Dollar, Senior Member, IEEE and Kostas J. Kyriakopoulos Member, IEEE
Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery
 Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery Claudio Pacchierotti Domenico Prattichizzo Katherine J. Kuchenbecker Motivation Despite its expected clinical
Cutaneous Feedback of Fingertip Deformation and Vibration for Palpation in Robotic Surgery Claudio Pacchierotti Domenico Prattichizzo Katherine J. Kuchenbecker Motivation Despite its expected clinical
Design and Control of an Anthropomorphic Robotic Arm
 Journal Of Industrial Engineering Research ISSN- 2077-4559 Journal home page: http://www.iwnest.com/ijer/ 2016. 2(1): 1-8 RSEARCH ARTICLE Design and Control of an Anthropomorphic Robotic Arm Simon A/L
Journal Of Industrial Engineering Research ISSN- 2077-4559 Journal home page: http://www.iwnest.com/ijer/ 2016. 2(1): 1-8 RSEARCH ARTICLE Design and Control of an Anthropomorphic Robotic Arm Simon A/L
Multisensory Based Manipulation Architecture
 Marine Robot and Dexterous Manipulatin for Enabling Multipurpose Intevention Missions WP7 Multisensory Based Manipulation Architecture GIRONA 2012 Y2 Review Meeting Pedro J Sanz IRS Lab http://www.irs.uji.es/
Marine Robot and Dexterous Manipulatin for Enabling Multipurpose Intevention Missions WP7 Multisensory Based Manipulation Architecture GIRONA 2012 Y2 Review Meeting Pedro J Sanz IRS Lab http://www.irs.uji.es/
Robotic Hand Using Arduino
 Robotic Hand Using Arduino Varun Sant 1, Kartik Penshanwar 2, Akshay Sarkate 3, Prof.A.V.Walke 4 Padmabhoshan Vasantdada Patil Institute of Technology, Bavdhan, Pune, INDIA Abstract: This paper highlights
Robotic Hand Using Arduino Varun Sant 1, Kartik Penshanwar 2, Akshay Sarkate 3, Prof.A.V.Walke 4 Padmabhoshan Vasantdada Patil Institute of Technology, Bavdhan, Pune, INDIA Abstract: This paper highlights
Snow Problem Prototype Concepts for DESTINATION: DEEP SPACE
 ROBOT IN 3 DAYS: SNOW PROBLEM 1 Snow Problem Prototype Concepts for DESTINATION: DEEP SPACE Abraham Carter, Nick Riedel Abstract This white paper summarizes our prototypes for DESTINATION: DEEP SPACE,
ROBOT IN 3 DAYS: SNOW PROBLEM 1 Snow Problem Prototype Concepts for DESTINATION: DEEP SPACE Abraham Carter, Nick Riedel Abstract This white paper summarizes our prototypes for DESTINATION: DEEP SPACE,
Prospective Teleautonomy For EOD Operations
 Perception and task guidance Perceived world model & intent Prospective Teleautonomy For EOD Operations Prof. Seth Teller Electrical Engineering and Computer Science Department Computer Science and Artificial
Perception and task guidance Perceived world model & intent Prospective Teleautonomy For EOD Operations Prof. Seth Teller Electrical Engineering and Computer Science Department Computer Science and Artificial
Live. With Michelangelo
 Live. With Michelangelo As natural as you are Live. With Michelangelo As natural as you are 1 2 Live. With Michelangelo As natural as you are Few parts of the human body are as versatile and complex as
Live. With Michelangelo As natural as you are Live. With Michelangelo As natural as you are 1 2 Live. With Michelangelo As natural as you are Few parts of the human body are as versatile and complex as
Easy Robot Programming for Industrial Manipulators by Manual Volume Sweeping
 Easy Robot Programming for Industrial Manipulators by Manual Volume Sweeping *Yusuke MAEDA, Tatsuya USHIODA and Satoshi MAKITA (Yokohama National University) MAEDA Lab INTELLIGENT & INDUSTRIAL ROBOTICS
Easy Robot Programming for Industrial Manipulators by Manual Volume Sweeping *Yusuke MAEDA, Tatsuya USHIODA and Satoshi MAKITA (Yokohama National University) MAEDA Lab INTELLIGENT & INDUSTRIAL ROBOTICS
Categories of Robots and their Hardware Components. Click to add Text Martin Jagersand
 Categories of Robots and their Hardware Components Click to add Text Martin Jagersand Click to add Text Robot? Click to add Text Robot? How do we categorize these robots? What they can do? Most robots
Categories of Robots and their Hardware Components Click to add Text Martin Jagersand Click to add Text Robot? Click to add Text Robot? How do we categorize these robots? What they can do? Most robots
Real-Time Teleop with Non-Prehensile Manipulation
 Real-Time Teleop with Non-Prehensile Manipulation Youngbum Jun, Jonathan Weisz, Christopher Rasmussen, Peter Allen, Paul Oh Mechanical Engineering Drexel University Philadelphia, USA, 19104 Email: youngbum.jun@drexel.edu,
Real-Time Teleop with Non-Prehensile Manipulation Youngbum Jun, Jonathan Weisz, Christopher Rasmussen, Peter Allen, Paul Oh Mechanical Engineering Drexel University Philadelphia, USA, 19104 Email: youngbum.jun@drexel.edu,
Self-learning Assistive Exoskeleton with Sliding Mode Admittance Control
 213 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, 213. Tokyo, Japan Self-learning Assistive Exoskeleton with Sliding Mode Admittance Control Tzu-Hao Huang, Ching-An
213 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, 213. Tokyo, Japan Self-learning Assistive Exoskeleton with Sliding Mode Admittance Control Tzu-Hao Huang, Ching-An