ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
|
|
|
- Chloe Chapman
- 5 years ago
- Views:
Transcription

1 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino
2 What is Robotics? Robotics is the study and design of robots Robots can be used in different contexts and are classified as 1. Industrial robots 2. Humanoid & biomimetic robots 3. Service robots 4. Exploration robots 5. Service & exploration robots can be a) wheeled (rovers) b) flying (UAS,UAV, Quadcopters, etc.) c) legged There is a partial overlapping of these classes 2
3 What is Robotics? Definitions of Robot According to Robotics Institute of America A reprogrammable, multifunctional manipulator designed to move material, parts, tools, or specialized devices through various programmed functions for the performance of a variety of tasks. Oxford American Dictionary A machine capable of carrying out a complex series of actions automatically, programmed by a computer Merriam-Webster Dictionary 1. A machine that looks and acts like a human being. 2. An efficient but insensitive person. 3. A device that automatically performs repetitive tasks. 4. Something guided by automatic controls 3


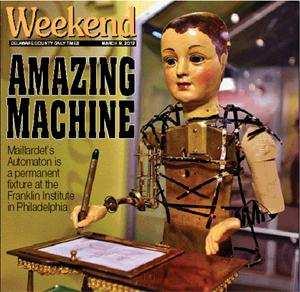
4 Robot The term robot, derived from the Slav term robota= executive labor, was introduced in 1920 by the Czech playwright Karel Čapek in the play Rossum s Universal Robots But the concept behind a robotappeared several years before any real robot was built 4




5 Timeline 5



6 Timeline : robots are described either in novels and plays or in science fiction stories (Frankenstein, RUR, Asimov, ) 6


7 Timeline 1945: tele-manipulators used for nuclear products processing 7



8 Timeline 1948: Grey Walter (UK) builds turtle robots Elmer and Elsie 8


9 Timeline 1956: Unimation is the first industrial robot firm 1961: first robot on GM car lines 9


10 Timeline 1970: SRI Shakey Shakey was the first mobile robot to reason about its actions. Developed by SRI's (Stanford Research Institute) Artificial Intelligence Center from 1966 through Shakey has had a substantial legacy and influence on present-day artificial intelligence and robotics. Shakey had a TV camera, a triangulating range finder, and bump sensors, and was connected to DEC PDP-10 and PDP-15 computers via radio and video links. Shakey used programs for perception, world-modeling, and acting. Low-level action routines took care of simple moving, turning, and route planning. Intermediate level actions strung the low level ones together in ways that robustly accomplished more complex tasks. The highest level programs could make and execute plans to achieve goals given it by a user. The system also generalized and saved these plans for possible future use. 10


11 Timeline 1975: PUMA manipulator 11



12 Timeline 1979: Stanford cart 12




13 Timeline 1999: Sony AIBO 13


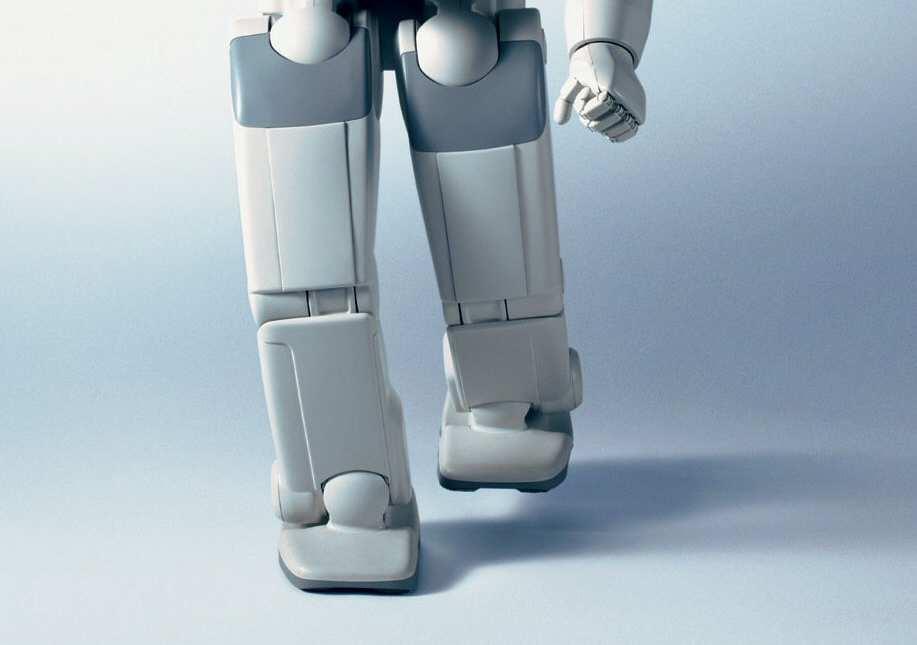
14 Timeline 2000: Honda Asimo 14



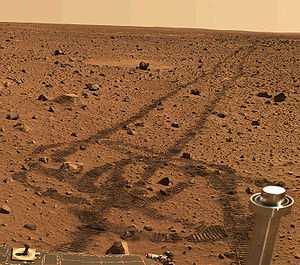
15 Timeline 2004: Mars rovers Spirit & Opportunity 15




16 Timeline : DARPA Challenge 16





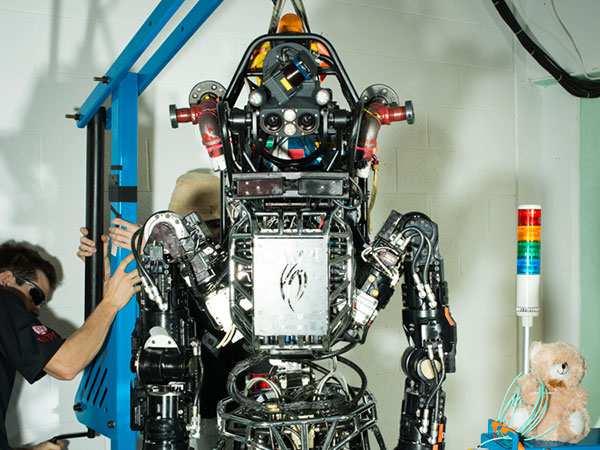
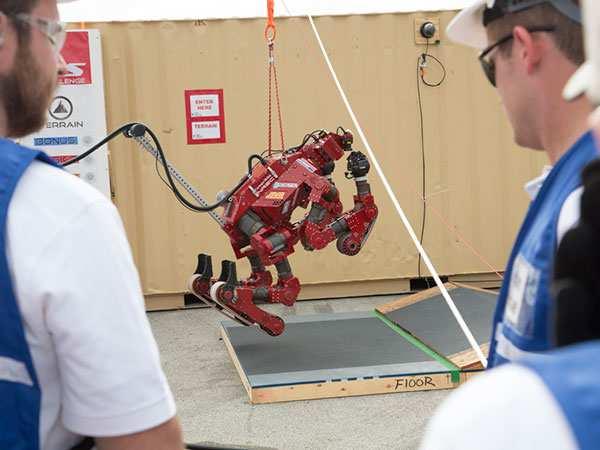
17 Timeline 2015: DARPA Robotics Challenge 17



18 Timeline 2015: DARPA Robotics Challenge 18
19 Timeline 2015: DARPA Robotics Challenge 19

20 Timeline 2015: DARPA Robotics Challenge 20

21 Timeline

 joint sensors only *recent developments include")

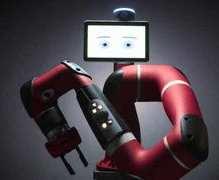
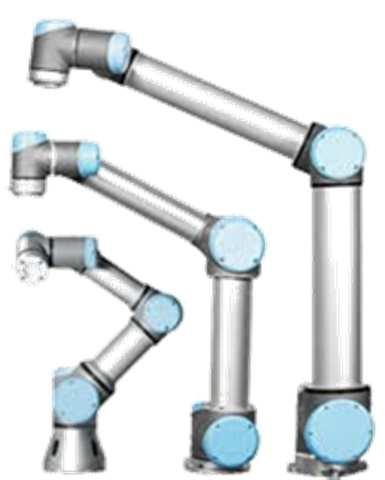
22 Industrial robots Similar to human arms with wrist and a final hand for holding tools Rigid mechanical structure to guarantee accuracy and precision (repeatability) 5-6 (rarely 7) dof Internal (proprioceptive) joint sensors only *recent developments include vision sensors High payloads Reduction gears Well known and quasi-static environment Strict safety requirements Externally supplied power 22

23 Video 23

24 Video 24
25 Video 25
26 Video 26





27 Humanoid robots Similar to human body with a torso, two arms, two legs, 2-5 fingered hands Complex mechanical structure to guarantee stable bipedal motion Many dofs Internal and external sensors Low payloads Reduction gears or direct drives Unknown and changing environment: land only Limited autonomy Safety requirements TBD HMI and social acceptance issues 27




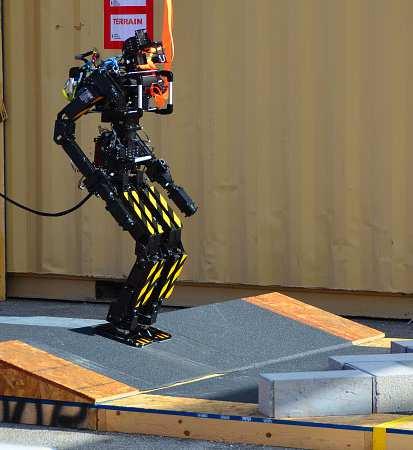
28 Examples from DRC


29 Many onboard sensors 29


30 Examples 30








31 Future trends 31
32 Video 32
33 Video 33





34 Biomimetic robots Similar to animals, insects, fishes, birds, etc. May have more than two legs, no legs at all, wings, fins; can walk, crawl, swim, fly Internal and external sensors Low medium payloads, depending on structure No safety requirements Unknown and changing environment: sea, air, land 34
35 Service robots May have different motion structures: mostly wheeled (differential drives or 4-wheels), but UAVs are becoming popular Mechanical structure is important, but software is a critical issue Internal and external sensors Cameras (single, stereo 3D, ToF, omnidirectional) Laser scanners and Lidars Proximity sensors Special purpose, e.g., thermo-cameras Low to medium size payloads (according to use) HMI is important Unknown and changing environment: indoor (flat), outdoor (land, air, underwater) Privacy and legal issues important 35
36 UAVs Unmanned Aerial (or Autonomous) Vehicles are known due to their use as military drones, but now quadcopters are very common Civil applications are becoming important surveillance and patrolling of large structures and sites disaster area analysis; search and rescue (SAR) agricultural and environmental remote sensing leisure: commercial and filmmaking material transport Mainly outdoor, but indoor use is gaining interest Unknown environment Limited payload Limited autonomy (battery life is critical) and often tele-operated Mostly vision sensors (lightweight) Privacy and legal issues important Basilio Bona 36 ROBOTICS 01PEEQW /2017






37 Examples 37


 Usually tele-operated, but partial autonomy")
38 Exploration robots Used for planetary or deep space exploration e.g., Spirit, Opportunity, Curiosity, future Moon and Mars rovers Some used for underwater or harsh environments (volcanoes, Antarctica exploration, etc.) Usually tele-operated, but partial autonomy necessary due to long time delays between Earth and Mars 38
39 Course content 1 Kinematic Chains: constitutive elements; KC types: open, closed; KC dofs: redundant, non redundant chains Industrial robot types: arms and wrists Kinematic chains: algorithms for fast computation of direct and inverse position and velocity kinematic functions Denavit-Hartenberg conventions and DH parameters Homogeneous matrices Jacobian matrices Statics: kineto-static relations Dynamics: Lagrange equations, general form for control Control algorithms: independent joints linear control, MIMO nonlinear control 39
40 Course content 2 Wheeled rovers structures, differential drive kinematics non-holonomy odometry issues Onboard sensors: some types will be briefly analyzed Mapping, localization and SLAM issues Path planning 40
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics studies robots For history and definitions see the 2013 slides http://www.ladispe.polito.it/corsi/meccatronica/01peeqw/2014-15/slides/robotics_2013_01_a_brief_history.pdf
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino What is Robotics? Robotics studies robots For history and definitions see the 2013 slides http://www.ladispe.polito.it/corsi/meccatronica/01peeqw/2014-15/slides/robotics_2013_01_a_brief_history.pdf
What is Robotics. Robotics is the science that studies robots and the technology that builds them
 What is Robotics 02CFIC CY Robotics is the science that studies robots and the technology that builds them Robotics started its development during WWII (Manhattan project) Robots (seen as an artificial
What is Robotics 02CFIC CY Robotics is the science that studies robots and the technology that builds them Robotics started its development during WWII (Manhattan project) Robots (seen as an artificial
Revised and extended. Accompanies this course pages heavier Perception treated more thoroughly. 1 - Introduction
 Topics to be Covered Coordinate frames and representations. Use of homogeneous transformations in robotics. Specification of position and orientation Manipulator forward and inverse kinematics Mobile Robots:
Topics to be Covered Coordinate frames and representations. Use of homogeneous transformations in robotics. Specification of position and orientation Manipulator forward and inverse kinematics Mobile Robots:
What is a robot. Robots (seen as artificial beings) appeared in books and movies long before real applications. Basilio Bona ROBOTICS 01PEEQW
 appeared in books and movies long before real applications. Basilio Bona ROBOTICS 01PEEQW") ROBOTICS 01PEEQW An Introduction Basilio Bona DAUIN Politecnico di Torino What is a robot According to the Robot Institute of America (1979) a robot is: A reprogrammable, multifunctional manipulator designed
ROBOTICS 01PEEQW An Introduction Basilio Bona DAUIN Politecnico di Torino What is a robot According to the Robot Institute of America (1979) a robot is: A reprogrammable, multifunctional manipulator designed
ROBOTICS ENG YOUSEF A. SHATNAWI INTRODUCTION
 ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
Introduction to Robotics
 Introduction to Robotics Jee-Hwan Ryu School of Mechanical Engineering Korea University of Technology and Education What is Robot? Robots in our Imagination What is Robot Like in Our Real Life? Origin
Introduction to Robotics Jee-Hwan Ryu School of Mechanical Engineering Korea University of Technology and Education What is Robot? Robots in our Imagination What is Robot Like in Our Real Life? Origin
Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur
 Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture - 01 Introduction to Robot and Robotics Let us start with the course on Robotics.
Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture - 01 Introduction to Robot and Robotics Let us start with the course on Robotics.
Chapter 1. Robot and Robotics PP
 Chapter 1 Robot and Robotics PP. 01-19 Modeling and Stability of Robotic Motions 2 1.1 Introduction A Czech writer, Karel Capek, had first time used word ROBOT in his fictional automata 1921 R.U.R (Rossum
Chapter 1 Robot and Robotics PP. 01-19 Modeling and Stability of Robotic Motions 2 1.1 Introduction A Czech writer, Karel Capek, had first time used word ROBOT in his fictional automata 1921 R.U.R (Rossum
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Agenda Motivation Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 Bridge the Gap Mobile
Advanced Robotics Introduction Institute for Software Technology 1 Agenda Motivation Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 Bridge the Gap Mobile
Introduction to Robotics
 Introduction to Robotics Analysis, systems, Applications Saeed B. Niku Chapter 1 Fundamentals 1. Introduction Fig. 1.1 (a) A Kuhnezug truck-mounted crane Reprinted with permission from Kuhnezug Fordertechnik
Introduction to Robotics Analysis, systems, Applications Saeed B. Niku Chapter 1 Fundamentals 1. Introduction Fig. 1.1 (a) A Kuhnezug truck-mounted crane Reprinted with permission from Kuhnezug Fordertechnik
JNTU World. Introduction to Robotics. Materials Provided by JNTU World Team. JNTU World JNTU World. Downloaded From JNTU World (http://(http://
 Introduction to Robotics Materials Provided by Team Definition Types Uses History Key components Applications Future Robotics @ MPCRL Outline Robot Defined Word robot was coined by a Czech novelist Karel
Introduction to Robotics Materials Provided by Team Definition Types Uses History Key components Applications Future Robotics @ MPCRL Outline Robot Defined Word robot was coined by a Czech novelist Karel
INTRODUCTION to ROBOTICS
 1 INTRODUCTION to ROBOTICS Robotics is a relatively young field of modern technology that crosses traditional engineering boundaries. Understanding the complexity of robots and their applications requires
1 INTRODUCTION to ROBOTICS Robotics is a relatively young field of modern technology that crosses traditional engineering boundaries. Understanding the complexity of robots and their applications requires
Advanced Robotics Introduction
 Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Advanced Robotics Introduction Institute for Software Technology 1 Motivation Agenda Some Definitions and Thought about Autonomous Robots History Challenges Application Examples 2 http://youtu.be/rvnvnhim9kg
Introduction to Robotics
 Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-3470 Introduction to Robotics Robotica for Computer Engineering students A.A.
Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-3470 Introduction to Robotics Robotica for Computer Engineering students A.A.
CS494/594: Software for Intelligent Robotics
 CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
Lecture 23: Robotics. Instructor: Joelle Pineau Class web page: What is a robot?
 COMP 102: Computers and Computing Lecture 23: Robotics Instructor: (jpineau@cs.mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp102 What is a robot? The word robot is popularized by the Czech playwright
COMP 102: Computers and Computing Lecture 23: Robotics Instructor: (jpineau@cs.mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp102 What is a robot? The word robot is popularized by the Czech playwright
Robotics Manipulation and control. University of Strasbourg Telecom Physique Strasbourg, ISAV option Master IRIV, AR track Jacques Gangloff
 Robotics Manipulation and control University of Strasbourg Telecom Physique Strasbourg, ISAV option Master IRIV, AR track Jacques Gangloff Outline of the lecture Introduction : Overview 1. Theoretical
Robotics Manipulation and control University of Strasbourg Telecom Physique Strasbourg, ISAV option Master IRIV, AR track Jacques Gangloff Outline of the lecture Introduction : Overview 1. Theoretical
What is a robot? Introduction. Some Current State-of-the-Art Robots. More State-of-the-Art Research Robots. Version:
 What is a robot? Notion derives from 2 strands of thought: Introduction Version: 15.10.03 - Humanoids human-like - Automata self-moving things Robot derives from Czech word robota - Robota : forced work
What is a robot? Notion derives from 2 strands of thought: Introduction Version: 15.10.03 - Humanoids human-like - Automata self-moving things Robot derives from Czech word robota - Robota : forced work
Year 1805 Doll, made by Maillardet, that wrote in either French or English and could draw landscapes
 Unit 8 : ROBOTICS INTRODUCTION Robots are devices that are programmed to move parts, or to do work with a tool. Robotics is a multidisciplinary engineering field dedicated to the development of autonomous
Unit 8 : ROBOTICS INTRODUCTION Robots are devices that are programmed to move parts, or to do work with a tool. Robotics is a multidisciplinary engineering field dedicated to the development of autonomous
COS Lecture 1 Autonomous Robot Navigation
 COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
EN407: Robotics. Dr. Rohan Munasinghe Dept. of Electronic and Telecommunication Engineering University of Moratuwa
 EN407: Robotics Dr. Rohan Munasinghe Dept. of Electronic and Telecommunication Engineering University of Moratuwa Course Information Scope The course provides a general introduction to the field of robotics,
EN407: Robotics Dr. Rohan Munasinghe Dept. of Electronic and Telecommunication Engineering University of Moratuwa Course Information Scope The course provides a general introduction to the field of robotics,
ME7752: Mechanics and Control of Robots Lecture 1
 ME7752: Mechanics and Control of Robots Lecture 1 Instructor: Manoj Srinivasan Office: E340 Scott Laboratory Email: srinivasan.88@osu.edu ( PDF posted. In the PDF, if there are no links to videos, do a
ME7752: Mechanics and Control of Robots Lecture 1 Instructor: Manoj Srinivasan Office: E340 Scott Laboratory Email: srinivasan.88@osu.edu ( PDF posted. In the PDF, if there are no links to videos, do a
CS325 Artificial Intelligence Robotics I Autonomous Robots (Ch. 25)
") CS325 Artificial Intelligence Robotics I Autonomous Robots (Ch. 25) Dr. Cengiz Günay, Emory Univ. Günay Robotics I Autonomous Robots (Ch. 25) Spring 2013 1 / 15 Robots As Killers? The word robot coined
CS325 Artificial Intelligence Robotics I Autonomous Robots (Ch. 25) Dr. Cengiz Günay, Emory Univ. Günay Robotics I Autonomous Robots (Ch. 25) Spring 2013 1 / 15 Robots As Killers? The word robot coined
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
Autonomous Robotics. CS Fall Amarda Shehu. Department of Computer Science George Mason University
 Autonomous Robotics CS 485 - Fall 2016 Amarda Shehu Department of Computer Science George Mason University 1 Outline of Today s Class 2 Robotics over the Years 3 Trends in Robotics Research 4 Course Organization
Autonomous Robotics CS 485 - Fall 2016 Amarda Shehu Department of Computer Science George Mason University 1 Outline of Today s Class 2 Robotics over the Years 3 Trends in Robotics Research 4 Course Organization
GENERAL I ARTICLE. Robotics. 1. Components and Subsystems. reprogrammable. The robot derives all its versatility and more
 Robotics 1. Components and Subsystems J R Vengateswaran In this part of the article, an attempt has been made to trace the birth of the robot and the persons who were instrumental in the evolution of the
Robotics 1. Components and Subsystems J R Vengateswaran In this part of the article, an attempt has been made to trace the birth of the robot and the persons who were instrumental in the evolution of the
World Technology Evaluation Center International Study of Robotics Research. Robotic Vehicles. Robotic vehicles study group:
 World Technology Evaluation Center International Study of Robotics Research Robotic Vehicles Robotic vehicles study group: Arthur Sanderson, Rensselaer Polytechnic Institute (Presenter) George Bekey, University
World Technology Evaluation Center International Study of Robotics Research Robotic Vehicles Robotic vehicles study group: Arthur Sanderson, Rensselaer Polytechnic Institute (Presenter) George Bekey, University
Robotics Enabling Autonomy in Challenging Environments
 Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
RoboCup: Not Only a Robotics Soccer Game but also a New Market Created for Future
 RoboCup: Not Only a Robotics Soccer Game but also a New Market Created for Future Kuo-Yang Tu Institute of Systems and Control Engineering National Kaohsiung First University of Science and Technology
RoboCup: Not Only a Robotics Soccer Game but also a New Market Created for Future Kuo-Yang Tu Institute of Systems and Control Engineering National Kaohsiung First University of Science and Technology
An Example of robots with their sensors
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 1 An Example of robots with their sensors Basilio Bona ROBOTICS 01PEEQW 3 Another example Omnivision
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 1 An Example of robots with their sensors Basilio Bona ROBOTICS 01PEEQW 3 Another example Omnivision
Walking and Flying Robots for Challenging Environments
 Shaping the future Walking and Flying Robots for Challenging Environments Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Lisbon, Portugal, July 29, 2016 Roland Siegwart 29.07.2016 1 Content
Shaping the future Walking and Flying Robots for Challenging Environments Roland Siegwart, ETH Zurich www.asl.ethz.ch www.wysszurich.ch Lisbon, Portugal, July 29, 2016 Roland Siegwart 29.07.2016 1 Content
ENME 489L: Biologically Inspired Robotics
 ENME 489L: Biologically Inspired Robotics Satyandra K. Gupta and Arvind Ananthanarayanan Department of Mechanical Engineering and Institute for Systems Research University of Maryland Course Introduction
ENME 489L: Biologically Inspired Robotics Satyandra K. Gupta and Arvind Ananthanarayanan Department of Mechanical Engineering and Institute for Systems Research University of Maryland Course Introduction
Industrial Robotics. Claudio Melchiorri. Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna
 Università di Bologna") Industrial Robotics Claudio Melchiorri Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna email: claudio.melchiorri@unibo.it C. Melchiorri (DEI) Industrial
Industrial Robotics Claudio Melchiorri Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna email: claudio.melchiorri@unibo.it C. Melchiorri (DEI) Industrial
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
Recommended Text. Logistics. Course Logistics. Intelligent Robotic Systems
 Recommended Text Intelligent Robotic Systems CS 685 Jana Kosecka, 4444 Research II kosecka@gmu.edu, 3-1876 [1] S. LaValle: Planning Algorithms, Cambridge Press, http://planning.cs.uiuc.edu/ [2] S. Thrun,
Recommended Text Intelligent Robotic Systems CS 685 Jana Kosecka, 4444 Research II kosecka@gmu.edu, 3-1876 [1] S. LaValle: Planning Algorithms, Cambridge Press, http://planning.cs.uiuc.edu/ [2] S. Thrun,
Experimental Robotics CMPUT 412. Martin Jagersand Camilo Perez
 Experimental Robotics CMPUT 412 Martin Jagersand Camilo Perez Course Questions Why study robotics? What, exactly, is robotics about? What work is involved? and other questions as well! Why Robotics? shift
Experimental Robotics CMPUT 412 Martin Jagersand Camilo Perez Course Questions Why study robotics? What, exactly, is robotics about? What work is involved? and other questions as well! Why Robotics? shift
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo. Introduction: Applications, Problems, Architectures
 Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012
 July 25 th, 2012") Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012 1 2 Robotic Applications in Smart Homes Control of the physical
Henry Lin, Department of Electrical and Computer Engineering, California State University, Bakersfield Lecture 8 (Robotics) July 25 th, 2012 1 2 Robotic Applications in Smart Homes Control of the physical
Robot Mechanics Lec. 1: An Introduction
 Robot Mechanics Lec. 1: An Introduction Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi August 01, 2017@IIT Delhi Contribution of IIT Delhi Humanoid Robots Asimo (Honda): 120cm; 52kg Qrio (Sony): 58cm; 7kg
Robot Mechanics Lec. 1: An Introduction Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi August 01, 2017@IIT Delhi Contribution of IIT Delhi Humanoid Robots Asimo (Honda): 120cm; 52kg Qrio (Sony): 58cm; 7kg
Robotics: Evolution, Technology and Applications
 Robotics: Evolution, Technology and Applications By: Dr. Hamid D. Taghirad Head of Control Group, and Department of Electrical Engineering K.N. Toosi University of Tech. Department of Electrical Engineering
Robotics: Evolution, Technology and Applications By: Dr. Hamid D. Taghirad Head of Control Group, and Department of Electrical Engineering K.N. Toosi University of Tech. Department of Electrical Engineering
Robot Motion Control and Planning
 Robot Motion Control and Planning http://www.cs.bilkent.edu.tr/~saranli/courses/cs548 Lecture 1 Introduction and Logistics Uluç Saranlı http://www.cs.bilkent.edu.tr/~saranli CS548 - Robot Motion Control
Robot Motion Control and Planning http://www.cs.bilkent.edu.tr/~saranli/courses/cs548 Lecture 1 Introduction and Logistics Uluç Saranlı http://www.cs.bilkent.edu.tr/~saranli CS548 - Robot Motion Control
MTRX 4700 : Experimental Robotics
 Mtrx 4700 : Experimental Robotics Dr. Stefan B. Williams Dr. Robert Fitch Slide 1 Course Objectives The objective of the course is to provide students with the essential skills necessary to develop robotic
Mtrx 4700 : Experimental Robotics Dr. Stefan B. Williams Dr. Robert Fitch Slide 1 Course Objectives The objective of the course is to provide students with the essential skills necessary to develop robotic
FUNDAMENTALS OF ROBOTICS
 FUNDAMENTALS OF ROBOTICS Ingeniería en Computación UDA: FUNDAMENTOS DE ROBÓTICA TEMA: INTRODUCCIÓN A LA ROBÓTICA E L A B O R Ó : D R. E N C. H É C T O R R A F A E L O R O Z C O A G U I R R E C U U A E
FUNDAMENTALS OF ROBOTICS Ingeniería en Computación UDA: FUNDAMENTOS DE ROBÓTICA TEMA: INTRODUCCIÓN A LA ROBÓTICA E L A B O R Ó : D R. E N C. H É C T O R R A F A E L O R O Z C O A G U I R R E C U U A E
Introduction to Vision & Robotics
 Introduction to Vision & Robotics Lecturers: Tim Hospedales 50-4450, IF 1.10 t.hospedales@ed.ac.uk Michael Herrmann 51-7177, IF 1.42 michael.herrmann@ed.ac.uk Lectures (Mon and Thr 9:00 9:50) are available
Introduction to Vision & Robotics Lecturers: Tim Hospedales 50-4450, IF 1.10 t.hospedales@ed.ac.uk Michael Herrmann 51-7177, IF 1.42 michael.herrmann@ed.ac.uk Lectures (Mon and Thr 9:00 9:50) are available
Funzionalità per la navigazione di robot mobili. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Funzionalità per la navigazione di robot mobili Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Variability of the Robotic Domain UNIBG - Corso di Robotica - Prof. Brugali Tourist
Funzionalità per la navigazione di robot mobili Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Variability of the Robotic Domain UNIBG - Corso di Robotica - Prof. Brugali Tourist
FUNDAMENTALS ROBOT TECHNOLOGY. An Introduction to Industrial Robots, T eleoperators and Robot Vehicles. D J Todd. Kogan Page
 FUNDAMENTALS of ROBOT TECHNOLOGY An Introduction to Industrial Robots, T eleoperators and Robot Vehicles D J Todd &\ Kogan Page First published in 1986 by Kogan Page Ltd 120 Pentonville Road, London Nl
FUNDAMENTALS of ROBOT TECHNOLOGY An Introduction to Industrial Robots, T eleoperators and Robot Vehicles D J Todd &\ Kogan Page First published in 1986 by Kogan Page Ltd 120 Pentonville Road, London Nl
An Introduction to Robotics. Elliot Ratchik, MS Former Senior Scientist, Hoffman LaRoche And Mannkind Corp.
 An Introduction to Robotics Elliot Ratchik, MS Former Senior Scientist, Hoffman LaRoche And Mannkind Corp. What is a Robot What can it do History Key Components Applications Future Outline What is a Robot?
An Introduction to Robotics Elliot Ratchik, MS Former Senior Scientist, Hoffman LaRoche And Mannkind Corp. What is a Robot What can it do History Key Components Applications Future Outline What is a Robot?
Lets Learn of Robot Technology
 Lets Learn of Robot Technology Dr. M.S. Ajmal Deen Ali, M.E., Ph.D (IITM) Ajlon Technologies (www.ajlontech.com) Partner to : AlfaTKG Japan, IISc Bangalore & IITM The Origins of Robots 1738 Jacques de
Lets Learn of Robot Technology Dr. M.S. Ajmal Deen Ali, M.E., Ph.D (IITM) Ajlon Technologies (www.ajlontech.com) Partner to : AlfaTKG Japan, IISc Bangalore & IITM The Origins of Robots 1738 Jacques de
Cognitive Robotics 2017/2018
 Cognitive Robotics 2017/2018 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Cognitive Robotics 2017/2018 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Humanoid robot. Honda's ASIMO, an example of a humanoid robot
 Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Cognitive Robotics 2016/2017
 Cognitive Robotics 2016/2017 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Cognitive Robotics 2016/2017 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Course Details. Robotics is Interdisciplinary. Brief History of Robotics. Lecture 01 Robotics. Robotics 70% (WE) - 30% (CA)
 - 30% (CA)") Course Details Lecture 01 Robotics 70% (WE) - 30% (CA) Contents : Overview of Robotics, Robot Manipulator Modeling (kinematics), Robot Control (position and force), obstacle avoidance (mobile robots) MatLab
Course Details Lecture 01 Robotics 70% (WE) - 30% (CA) Contents : Overview of Robotics, Robot Manipulator Modeling (kinematics), Robot Control (position and force), obstacle avoidance (mobile robots) MatLab
MOBILE ROBOTICS. Sensors An Introduction
 CY 02CFIC CFIDV RO OBOTIC CA 01 MOBILE ROBOTICS Sensors An Introduction Basilio Bona DAUIN Politecnico di Torino Basilio Bona DAUIN Politecnico di Torino 001/1 CY CA 01CFIDV 02CFIC OBOTIC RO An Example
CY 02CFIC CFIDV RO OBOTIC CA 01 MOBILE ROBOTICS Sensors An Introduction Basilio Bona DAUIN Politecnico di Torino Basilio Bona DAUIN Politecnico di Torino 001/1 CY CA 01CFIDV 02CFIC OBOTIC RO An Example
Human Robot Interaction (HRI)
") Brief Introduction to HRI Batu Akan batu.akan@mdh.se Mälardalen Högskola September 29, 2008 Overview 1 Introduction What are robots What is HRI Application areas of HRI 2 3 Motivations Proposed Solution
Brief Introduction to HRI Batu Akan batu.akan@mdh.se Mälardalen Högskola September 29, 2008 Overview 1 Introduction What are robots What is HRI Application areas of HRI 2 3 Motivations Proposed Solution
CS148 - Building Intelligent Robots Lecture 2: Robotics Introduction and Philosophy. Instructor: Chad Jenkins (cjenkins)
") Lecture 2 Robot Philosophy Slide 1 CS148 - Building Intelligent Robots Lecture 2: Robotics Introduction and Philosophy Instructor: Chad Jenkins (cjenkins) Lecture 2 Robot Philosophy Slide 2 What is robotics?
Lecture 2 Robot Philosophy Slide 1 CS148 - Building Intelligent Robots Lecture 2: Robotics Introduction and Philosophy Instructor: Chad Jenkins (cjenkins) Lecture 2 Robot Philosophy Slide 2 What is robotics?
Sample Pages. Classroom Activities for the Busy Teacher: NXT. 2 nd Edition. Classroom Activities for the Busy Teacher: NXT -
 Classroom Activities for the Busy Teacher: NXT 2 nd Edition Table of Contents Chapter 1: Introduction... 1 Chapter 2: What is a robot?... 5 Chapter 3: Flowcharting... 11 Chapter 4: DomaBot Basics... 15
Classroom Activities for the Busy Teacher: NXT 2 nd Edition Table of Contents Chapter 1: Introduction... 1 Chapter 2: What is a robot?... 5 Chapter 3: Flowcharting... 11 Chapter 4: DomaBot Basics... 15
Planning in autonomous mobile robotics
 Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
Mobile Robots (Wheeled) (Take class notes)
 (Take class notes)") Mobile Robots (Wheeled) (Take class notes) Wheeled mobile robots Wheeled mobile platform controlled by a computer is called mobile robot in a broader sense Wheeled robots have a large scope of types and
Mobile Robots (Wheeled) (Take class notes) Wheeled mobile robots Wheeled mobile platform controlled by a computer is called mobile robot in a broader sense Wheeled robots have a large scope of types and
Logic, Ontology and Planning: the Robot s Knowledge Lecture 1
 Logic, Ontology and Planning: the Robot s Knowledge Lecture 1 Stefano Borgo Laboratory for Applied Ontology (LOA), ISTC-CNR, Trento (IT) ESSLLI course 2018 Sofia, Bulgaria Scope of the course Robotics:
Logic, Ontology and Planning: the Robot s Knowledge Lecture 1 Stefano Borgo Laboratory for Applied Ontology (LOA), ISTC-CNR, Trento (IT) ESSLLI course 2018 Sofia, Bulgaria Scope of the course Robotics:
Robot Mechanics Lec. 1: An Introduction
 Robot Mechanics Lec. 1: An Introduction Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi August 03, 2015@IIT Delhi Contribution of IIT Delhi Humanoid Robots Asimo (Honda): 120cm; 52kg Qrio (Sony): 58cm; 7kg
Robot Mechanics Lec. 1: An Introduction Prof. S.K. Saha Dept. of Mech. Eng. IIT Delhi August 03, 2015@IIT Delhi Contribution of IIT Delhi Humanoid Robots Asimo (Honda): 120cm; 52kg Qrio (Sony): 58cm; 7kg
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
Future Intelligent Machines
 Future Intelligent Machines TKK GIM research institute Content of the talk Introductory remarks Intelligent machines Subsystems technology and modularity Robots and biology Robots in homes Introductory
Future Intelligent Machines TKK GIM research institute Content of the talk Introductory remarks Intelligent machines Subsystems technology and modularity Robots and biology Robots in homes Introductory
JEPPIAAR ENGINEERING COLLEGE
 JEPPIAAR ENGINEERING COLLEGE Jeppiaar Nagar, Rajiv Gandhi Salai 600 119 DEPARTMENT OFMECHANICAL ENGINEERING QUESTION BANK VII SEMESTER ME6010 ROBOTICS Regulation 013 JEPPIAAR ENGINEERING COLLEGE Jeppiaar
JEPPIAAR ENGINEERING COLLEGE Jeppiaar Nagar, Rajiv Gandhi Salai 600 119 DEPARTMENT OFMECHANICAL ENGINEERING QUESTION BANK VII SEMESTER ME6010 ROBOTICS Regulation 013 JEPPIAAR ENGINEERING COLLEGE Jeppiaar
Robotics. Lecturer: Dr. Saeed Shiry Ghidary
 Robotics Lecturer: Dr. Saeed Shiry Ghidary Email: autrobotics@yahoo.com Outline of Course We will study fundamental algorithms for robotics with: Introduction to industrial robots and Particular emphasis
Robotics Lecturer: Dr. Saeed Shiry Ghidary Email: autrobotics@yahoo.com Outline of Course We will study fundamental algorithms for robotics with: Introduction to industrial robots and Particular emphasis
ARTIFICIAL INTELLIGENCE - ROBOTICS
 ARTIFICIAL INTELLIGENCE - ROBOTICS http://www.tutorialspoint.com/artificial_intelligence/artificial_intelligence_robotics.htm Copyright tutorialspoint.com Robotics is a domain in artificial intelligence
ARTIFICIAL INTELLIGENCE - ROBOTICS http://www.tutorialspoint.com/artificial_intelligence/artificial_intelligence_robotics.htm Copyright tutorialspoint.com Robotics is a domain in artificial intelligence
A Quick history. Ioannis Rekleitis
 A Quick history Ioannis Rekleitis Robot Reason Sense Act 2 Talos (Τάλως/Τάλων) 400 BC A giant man of bronze who protected Europa in Crete, circling the island's shores three times daily while guarding
A Quick history Ioannis Rekleitis Robot Reason Sense Act 2 Talos (Τάλως/Τάλων) 400 BC A giant man of bronze who protected Europa in Crete, circling the island's shores three times daily while guarding
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
Introduction to Vision & Robotics
 Introduction to Vision & Robotics Vittorio Ferrari, 650-2697,IF 1.27 vferrari@staffmail.inf.ed.ac.uk Michael Herrmann, 651-7177, IF1.42 mherrman@inf.ed.ac.uk Lectures: Handouts will be on the web (but
Introduction to Vision & Robotics Vittorio Ferrari, 650-2697,IF 1.27 vferrari@staffmail.inf.ed.ac.uk Michael Herrmann, 651-7177, IF1.42 mherrman@inf.ed.ac.uk Lectures: Handouts will be on the web (but
Information and Program
 Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
History of Robotics. University of Ottawa ENRICHMENT MINI-COURSE Robotics Intelligent Connection of the Perception to Action.
 History of Robotics University of Ottawa ENRICHMENT MINI-COURSE Robotics Intelligent Connection of the Perception to Action Codrin Pasca May 5, 2003 Introduction Definitions The early stages Our times
History of Robotics University of Ottawa ENRICHMENT MINI-COURSE Robotics Intelligent Connection of the Perception to Action Codrin Pasca May 5, 2003 Introduction Definitions The early stages Our times
4/30/13. + Admin. + What is a robot? Robotics. "I can't define a robot, but I know one when I see one. --Joseph Engelberger (1966)
") + Robotics http://www.youtube.com/watch?v=3eejcln5kyg CS311, Spring 2013 David Kauchak Some material adapted from slides from Zach Dodds + Admin + What is a robot? n Assignment 5 graded n Exam #2 available
+ Robotics http://www.youtube.com/watch?v=3eejcln5kyg CS311, Spring 2013 David Kauchak Some material adapted from slides from Zach Dodds + Admin + What is a robot? n Assignment 5 graded n Exam #2 available
Robotics and Autonomous Systems
 1 / 41 Robotics and Autonomous Systems Lecture 1: Introduction Simon Parsons Department of Computer Science University of Liverpool 2 / 41 Acknowledgements The robotics slides are heavily based on those
1 / 41 Robotics and Autonomous Systems Lecture 1: Introduction Simon Parsons Department of Computer Science University of Liverpool 2 / 41 Acknowledgements The robotics slides are heavily based on those
The Autonomous Robots Lab. Kostas Alexis
 The Autonomous Robots Lab Kostas Alexis Who we are? Established at January 2016 Current Team: 1 Head, 1 Senior Postdoctoral Researcher, 3 PhD Candidates, 1 Graduate Research Assistant, 2 Undergraduate
The Autonomous Robots Lab Kostas Alexis Who we are? Established at January 2016 Current Team: 1 Head, 1 Senior Postdoctoral Researcher, 3 PhD Candidates, 1 Graduate Research Assistant, 2 Undergraduate
Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free Human Following Navigation in Outdoor Environment
 Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
A conversation with Russell Stewart, July 29, 2015
 Participants A conversation with Russell Stewart, July 29, 2015 Russell Stewart PhD Student, Stanford University Nick Beckstead Research Analyst, Open Philanthropy Project Holden Karnofsky Managing Director,
Participants A conversation with Russell Stewart, July 29, 2015 Russell Stewart PhD Student, Stanford University Nick Beckstead Research Analyst, Open Philanthropy Project Holden Karnofsky Managing Director,
Intelligent Robotic Systems. What is a Robot? Is This a Robot? Prof. Richard Voyles Department of Computer Engineering University of Denver
 Intelligent Robotic Systems Prof. Richard Voyles Department of Computer Engineering University of Denver ENCE 3830/4800 What is a Robot? WWWebsters: a mechanism guided by automatic controls a device that
Intelligent Robotic Systems Prof. Richard Voyles Department of Computer Engineering University of Denver ENCE 3830/4800 What is a Robot? WWWebsters: a mechanism guided by automatic controls a device that
Robotics Introduction Matteo Matteucci
 Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
Robot: Robonaut 2 The first humanoid robot to go to outer space
 ProfileArticle Robot: Robonaut 2 The first humanoid robot to go to outer space For the complete profile with media resources, visit: http://education.nationalgeographic.org/news/robot-robonaut-2/ Program
ProfileArticle Robot: Robonaut 2 The first humanoid robot to go to outer space For the complete profile with media resources, visit: http://education.nationalgeographic.org/news/robot-robonaut-2/ Program
International Journal of Scientific & Engineering Research Volume 8, Issue 5, May ISSN
 International Journal of Scientific & Engineering Research Volume 8, Issue 5, May-2017 100 Robotic System and Artificial Intelligence 1. Mr. S Muni kumar, Asst. Professor, Dept. of MCA, KMMIPS 2. S. Irfan
International Journal of Scientific & Engineering Research Volume 8, Issue 5, May-2017 100 Robotic System and Artificial Intelligence 1. Mr. S Muni kumar, Asst. Professor, Dept. of MCA, KMMIPS 2. S. Irfan
ROBOTICS. Museum Classroom Programs. Pre- and Postvisit Activities. Grades 4 8. courtesy NASA/ JPL LL-050
 ROBOTICS Museum Classroom Programs Pre- and Postvisit Activities LL-050 INFORMATION & ACTIVITIES: Robotics We re Glad You re Coming! Thank you for selecting this Museum Classroom Programs class at the
ROBOTICS Museum Classroom Programs Pre- and Postvisit Activities LL-050 INFORMATION & ACTIVITIES: Robotics We re Glad You re Coming! Thank you for selecting this Museum Classroom Programs class at the
ROBOTICS A. WHAT IS A ROBOT?
 ROBOTICS In this Unit we will talk about a new branch of Computer Science, Robotics, and you will read about robots, their characteristics, uses and possible future developments. A. WHAT IS A ROBOT? 1
ROBOTICS In this Unit we will talk about a new branch of Computer Science, Robotics, and you will read about robots, their characteristics, uses and possible future developments. A. WHAT IS A ROBOT? 1
ATLAS. High Mobility, Humanoid Robot ROBOT 17 ALLSTARS -
 ATLAS High Mobility, Humanoid Robot Position: High Mobility, Humanoid Robot ATLAS Coach: Marc Raibert Stats: High mobility, humanoid robot designed to negotiate outdoor, rough terrain; Atlas can walk bipedally,
ATLAS High Mobility, Humanoid Robot Position: High Mobility, Humanoid Robot ATLAS Coach: Marc Raibert Stats: High mobility, humanoid robot designed to negotiate outdoor, rough terrain; Atlas can walk bipedally,
Lecture information. Intelligent Robotics Mobile robotic technology. Description of our seminar. Content of this course
 Intelligent Robotics Mobile robotic technology Lecturer Houxiang Zhang TAMS, Department of Informatics, Germany http://sied.dis.uniroma1.it/ssrr07/ Lecture information Class Schedule: Seminar Intelligent
Intelligent Robotics Mobile robotic technology Lecturer Houxiang Zhang TAMS, Department of Informatics, Germany http://sied.dis.uniroma1.it/ssrr07/ Lecture information Class Schedule: Seminar Intelligent
Cost Oriented Humanoid Robots
 Cost Oriented Humanoid Robots P. Kopacek Vienna University of Technology, Intelligent Handling and Robotics- IHRT, Favoritenstrasse 9/E325A6; A-1040 Wien kopacek@ihrt.tuwien.ac.at Abstract. Currently there
Cost Oriented Humanoid Robots P. Kopacek Vienna University of Technology, Intelligent Handling and Robotics- IHRT, Favoritenstrasse 9/E325A6; A-1040 Wien kopacek@ihrt.tuwien.ac.at Abstract. Currently there
Robotics: Robot. Robotics
 Robotics: Robot 1 Robotics: Robot 2 In ISO 8373, the International Organization for Standardization defines a robot as an automatically controlled, reprogrammable, multipurpose manipulator with three or
Robotics: Robot 1 Robotics: Robot 2 In ISO 8373, the International Organization for Standardization defines a robot as an automatically controlled, reprogrammable, multipurpose manipulator with three or
AUTONOMOUS SYSTEMS INTRODUCTION
 AUTONOMOUS SYSTEMS INTRODUCTION Pedro Lima, M. Isabel Ribeiro Instituto Superior Técnico/Instituto de Sistemas e Robótica September 2008 Course Handouts All rights reserved Autonomous Systems What is an
AUTONOMOUS SYSTEMS INTRODUCTION Pedro Lima, M. Isabel Ribeiro Instituto Superior Técnico/Instituto de Sistemas e Robótica September 2008 Course Handouts All rights reserved Autonomous Systems What is an
CAPACITIES FOR TECHNOLOGY TRANSFER
 CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
An Example of robots with their sensors
 ROBOTICA 03CFIOR DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 1 An Example of robots with their sensors 3 Another example Omnivision Camera (360 ) Pan-Tilt-Zoom (PTZ) camera
ROBOTICA 03CFIOR DAUIN Politecnico di Torino Mobile & Service Robotics Sensors for Robotics 1 An Example of robots with their sensors 3 Another example Omnivision Camera (360 ) Pan-Tilt-Zoom (PTZ) camera
What Is Robotics? What Is a Robot? Basic Components of a Robot
 What Is a Robot? A robot is a programmable mechanical device that can perform tasks and interact with its environment (with no human interaction). The word robot was coined by the Czech playwright Karel
What Is a Robot? A robot is a programmable mechanical device that can perform tasks and interact with its environment (with no human interaction). The word robot was coined by the Czech playwright Karel
Canadian Activities in Intelligent Robotic Systems - An Overview
 In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Canadian Activities in Intelligent Robotic
In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Canadian Activities in Intelligent Robotic
Robotics 1 Industrial Robotics
 Robotics 1 Industrial Robotics Prof. Alessandro De Luca Robotics 1 1 What is a robot?! industrial definition (RIA = Robotic Institute of America) re-programmable multi-functional manipulator designed to
Robotics 1 Industrial Robotics Prof. Alessandro De Luca Robotics 1 1 What is a robot?! industrial definition (RIA = Robotic Institute of America) re-programmable multi-functional manipulator designed to
A Brief Survey on Robotics
 Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology ISSN 2320 088X IMPACT FACTOR: 6.017 IJCSMC,
Available Online at www.ijcsmc.com International Journal of Computer Science and Mobile Computing A Monthly Journal of Computer Science and Information Technology ISSN 2320 088X IMPACT FACTOR: 6.017 IJCSMC,
Eurathlon Scenario Application Paper (SAP) Review Sheet
 Review Sheet") Eurathlon 2013 Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario Space Applications Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially
Eurathlon 2013 Scenario Application Paper (SAP) Review Sheet Team/Robot Scenario Space Applications Reconnaissance and surveillance in urban structures (USAR) For each of the following aspects, especially
Lecture: Allows operation in enviroment without prior knowledge
 Lecture: SLAM Lecture: Is it possible for an autonomous vehicle to start at an unknown environment and then to incrementally build a map of this enviroment while simulaneous using this map for vehicle
Lecture: SLAM Lecture: Is it possible for an autonomous vehicle to start at an unknown environment and then to incrementally build a map of this enviroment while simulaneous using this map for vehicle
CORC Exploring Robotics. Unit A: Introduction To Robotics
 CORC 3303 Exploring Robotics Unit A: Introduction To Robotics What is a robot? The robot word is attributed to Czech playwright Karel Capek. He first coined the term in his 1921 play Rossum's Universal
CORC 3303 Exploring Robotics Unit A: Introduction To Robotics What is a robot? The robot word is attributed to Czech playwright Karel Capek. He first coined the term in his 1921 play Rossum's Universal
Robotics: Science and Systems
 Robotics: Science and Systems Overview of Robotics Zhibin (Alex) Li School of Informatics University of Edinburgh Outline Definition: what are robots? Elements of robotics Mechanism & mechanical design
Robotics: Science and Systems Overview of Robotics Zhibin (Alex) Li School of Informatics University of Edinburgh Outline Definition: what are robots? Elements of robotics Mechanism & mechanical design
Unit 1: Introduction to Autonomous Robotics
 Unit 1: Introduction to Autonomous Robotics Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland January 16, 2009 COMP 4766/6778 (MUN) Course Introduction January
Unit 1: Introduction to Autonomous Robotics Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland January 16, 2009 COMP 4766/6778 (MUN) Course Introduction January
Laboratory Mini-Projects Summary
 ME 4290/5290 Mechanics & Control of Robotic Manipulators Dr. Bob, Fall 2017 Robotics Laboratory Mini-Projects (LMP 1 8) Laboratory Exercises: The laboratory exercises are to be done in teams of two (or
ME 4290/5290 Mechanics & Control of Robotic Manipulators Dr. Bob, Fall 2017 Robotics Laboratory Mini-Projects (LMP 1 8) Laboratory Exercises: The laboratory exercises are to be done in teams of two (or
Remote Supervision of Autonomous Humanoid Robots for Complex Disaster Recovery Tasks
 Remote Supervision of Autonomous Humanoid Robots for Complex Disaster Recovery Tasks Stefan Kohlbrecher, TU Darmstadt Joint work with Alberto Romay, Alexander Stumpf, Oskar von Stryk Simulation, Systems
Remote Supervision of Autonomous Humanoid Robots for Complex Disaster Recovery Tasks Stefan Kohlbrecher, TU Darmstadt Joint work with Alberto Romay, Alexander Stumpf, Oskar von Stryk Simulation, Systems
Content. Robotik: Möglichkeiten, Trends und Visionen. Introduction. Robotics the challenges and technology drivers. Robot Examples
 Robotik: Möglichkeiten, Trends und Visionen Roland Siegwart, ETH Zurich www.asl.ethz.ch Helbling-Abendseminar 18. März 2015, Swissôtel Zürich Roland Siegwart 06.11.2014 2 Content Introduction Robotics
Robotik: Möglichkeiten, Trends und Visionen Roland Siegwart, ETH Zurich www.asl.ethz.ch Helbling-Abendseminar 18. März 2015, Swissôtel Zürich Roland Siegwart 06.11.2014 2 Content Introduction Robotics