Multisensory Based Manipulation Architecture
|
|
|
- Maryann May
- 6 years ago
- Views:
Transcription






1 Marine Robot and Dexterous Manipulatin for Enabling Multipurpose Intevention Missions WP7 Multisensory Based Manipulation Architecture GIRONA 2012 Y2 Review Meeting Pedro J Sanz IRS Lab

2 IRS Lab


3 IRS Lab Main expertise HRI Mob. Manipulation






4 WP s Relationships WP9: Project Coordination and Management UJI WP8: Dissemination, Education and Training UdG WP5: Floating Manipulation UNIGE-ISME WP1: Navigation and Mapping UdG WP7: Multisensory Based Manipulation Architecture UJI WP3: Vehicles Intelligent Control Architecture HWU WP2: Single and Multiple Vehicles Control IST WP6: Hand+Arm Mechatronics System and Control UNIBO WP4: Visual/Acoustic Image Processing UIB May 5th, 2011 UdG, SPAIN 4
5 WP1 Navigation & Mapping Management Summary WP7: Multisensory Based Manipulation Architecture State of the work UJI UdG UIB UNIBO UNIGE- ISME IST HWU GT WP T7.1: Sensor integration 8 8 T7.2: ] Specification of interfaces T7.3: Software development T7.4: Experimental validation and benchmarking Total DELIVERABLE 7.1: [month 18, Responsible UJI] TR on the methodology aspects and requirements on the Multisensory and knowledge-based approach architecture for grasping and dexterous manipulation MILESTONE M2: [month 18, Responsible UJI] Object recovery from a fixed base manipulator
 First field experiments (Roses Harbour), on recovery a specific object has been demonstrated")
6 WP 7 Long Term Objective Related with Increasing the performance, focused on the physical interaction problem Grasping / manipulation by using different unknown objects in poor conditions (i.e. overlapping, bad visibility, etc.) First field experiments (Roses Harbour), on recovery a specific object has been demonstrated
7 WP7 - Multisensory Based Manipulation Architecture WP 7 Task [7.1] Sensor integration [UJI 8]; Months 1 to 12 (12 months) Task [7.2] Specification of interfaces [UJI 11] [UNIBO 1] [UNIGE-ISME 1]; Months 7 to 18 (11 months) Task [7.3] Software development [UJI 18] [UNIBO 1]; Months 11 to 34 (24 months) Task [7.4] Experimental validation and benchmarking [UJI 8] [UdG 2] [UIB 1] [UNIBO 2] [UNIGE-ISME 1] [GT 1]; Months 16 to 18 and 29 to 34 (9 months)


 and the")
8 WP7 - Multisensory Based Manipulation Architecture T7.1 Sensor Integration [UJI 8]. Months 1 to 12 (12 months) The Physical Interaction Framework Methodology Multisensory-based framework for the specification and robust control of physical interaction tasks, where the grasp and the task are jointly considered on the basis of the Task Frame Formalism (TFF) and the Knowledge-based approach to grasping Our previous work Moving to underwater The physical interaction frames



9 WP7 - Multisensory Based Manipulation Architecture T7.2 Specification of interfaces [UJI 11] [UNIBO 1] [UNIGE-ISME 1]. Months 7 to 18 (11 months) UJI: Manipulation planning & supervision. High-level sensor-based closed loop control of the end-effector UNIGE: Arm control & Floating manipulation Manipulation service Input: Task request Visual info Vehicle pose and velocity Internal: Closed loop control of the end-effector for the given task Output: Resultant force/torque to apply on the vehicle. Arm/Hand sensors info: FK, joint values, etc. Current state of the action. GT: Arm development UNIBO: Hand development & control 9
10 UNIBO UNIGE WP7 - Multisensory Based Manipulation Architecture T7.2 Specification of interfaces [UJI 11] [UNIBO 1] [UNIGE-ISME 1]. Months 7 to 18 (11 months) The Robot Operating System (ROS) was adopted for UNIBO-UNIGE-UJI communications Service /unige/switchcontrol Service /unige/switchpriorities Topic /unige/vtg (input) Topic /unige/joint_state (output) Topic /unige/arm_state (output) Topic /unige/vte (output) Switches between different control states: initialize, park, unpark, control, etc. Sets the priorities Transform-to-goal. Used when in control mode. Report joint values Reports the current control mode of the arm and other info that might be of interest Report FK with respect to the vehicle frame Service /unibo/initialize Service /unibo/setpreshape Action /unibo/grasp Topic /unibo/joint_state (output) Topic /unibo/force_feedback (output) Initialize hand (if needed). Sets a hand preshape: cylindrical, one-finger, etc. Applies the grasp on the object. Reports joint values Report the force feedback Regarding the interface with the high-level architecture, the messages defined in D3.1 have been implemented, thus connecting the manipulation sub-architecture with the Intelligent Control Architecture of WP3. Initial experiments of the above communication mechanisms have been already carried out in simulation.
 Object recovery from an")



11 WP 7 M2 (D7.1) Object recovery from an underwater fixed base manipulator Autonomous hooking sequence of a flight data recorder prototype in water tank conditions, with the arm mounted on an aluminium structure and under manual disturbances March 2011
 May 2011")


:")
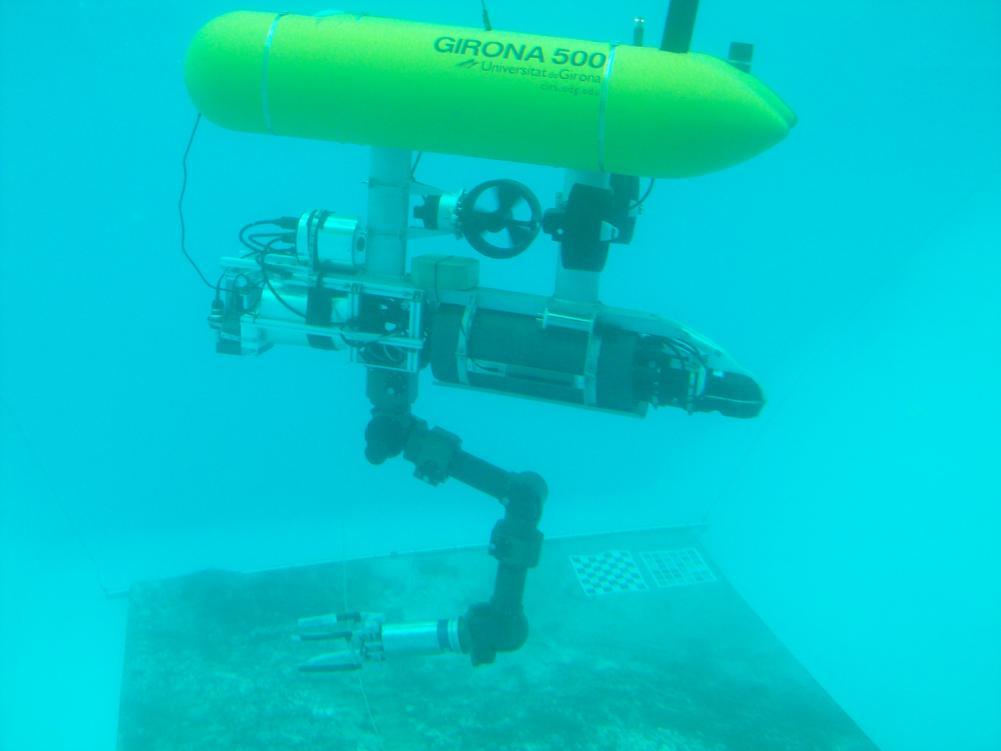
12 WP 7 M2 (D7.1) May 2011 Recovery experiments with a mobile base (Girona 500 I-AUV): Water tank, UdG

13 WP7 - Multisensory Based Manipulation Architecture T7.3 & T7.4 Task 7.3: Software development Object tracking and pose estimation Visual control of the manipulator 3D Reconstruction and grasp planning Task 7.4: Experimental validation and benchmarking Simulation experiments (Validating grasping controllers in UWSim) Real life experiments (Intervention experiments at Roses Harbour)



14 WP7 - Multisensory Based Manipulation Architecture T7.3 & T7.4 Ongoing Research 2 1 UWSim A new software tool for visualization and simulation of underwater robotic missions Multisensory based Autonomous Mobile Manipulation

15 1 A diagram of the main parts that compose UWSim

16 1 A virtual visualization of the CIRS water tank (UdG). A printed posted is placed on the bottom and loaded in multiresolution mode (seafloor texture provided by Pam Reid, Univ of Miami and Nuno Gracias, UdG)

17 1 Testing a tracking algorithm on virtual images

18 1 Arm control and manipulation actions can also be simulated

19 1 A survey being reproduced in UWSim, from the dataset captured during the real survey in ROS bag format. The complete sequence can be found at

20 1 The manipulation architecture integrated with the free-floating controller of WP5 has been validated

21 2 The testbed used for the experiments at IRS-Lab, UJI The arm is attached to a floating platform that is placed in the water


22 2 A module that combines a laser emitter with a vision system in order to recover the 3D structure of unknown objects was developed, enabling the grasp planning for autonomous execution

23 2 Scanning of the surface with the laser stripe while doing tracking and estimating the platform motion
.")
24 2 A laser scan of an amphora and a sea urchin (left), and the camera view and user grasp specification (right). The laser stripe is detected on the image and used for the reconstruction of the 3D points.

25 2 Autonomous execution of the grasps by the robot
26 2 Motion disturbances (vehicle trajectory) generated on the floating platform during the amphora recovery experiment (top), and grasping of the sea urchin (bottom).

27 WP 7 Dissemination EURON 10 th G. Giralt PhD Award : PhD Thesis of M. Prats (7 th April 2011)

28 WP 7 Dissemination Handling ROS Tutorial Grasp and Motion Planning with Underwater Intervention Vehicles running ROS: the experience of TRIDENT EU project 2 Regular Papers + 2 papers Workshop on Mobile Manipulation + Poster of TRIDENT 1. Fernández et al., Manipulation in the Seabed: A New Underwater Robot Arm for Shallow Water Intervention, IEEE Robotics & Automation Magazine, Submit. 2 nd review Prats et al., Towards Autonomous Intervention in Underwater Environments: Experiments on Object Recovery, Journal of Ocean Engineering, Submit Prats et al., Reconfigurable AUV for intervention missions: a case study on underwater object recovery, Intelligent Service Robotics, vol 5 (1), pp , García et al., USER INTERFACE ORIENTED TO THE SPECIFICATION OF UNDERWATER ROBOTIC INTERVENTIONS. Journal of Maritime Research, vol VIII (2), pp , Prats et al., Reliable non-prehensile door opening through the combination of vision, tactile and force feedback. Journal of Autonomous Robots, 29(2), pp , 2010.
29 WP 7 Conclusions With the combination of laser peak detection, target tracking, 3D reconstruction and grasp execution, this is a unique system in the underwater robotics literature. M2 has been successfully reached, and further experiments demonstrate the suitable progress of WP7 towards the TRIDENT objectives.


30 WP 7 Last Remarks
FP7 STREP. The. Consortium. Marine Robots and Dexterous Manipulation for Enabling Autonomous Underwater Multipurpose Intervention Missions
 FP7 STREP Marine Robots and Dexterous Manipulation for Enabling Autonomous Underwater Multipurpose Intervention Missions ID 248497 Strategic Objective: ICT 2009 4.2.1 Cognitive Systems, Interaction, Robotics
FP7 STREP Marine Robots and Dexterous Manipulation for Enabling Autonomous Underwater Multipurpose Intervention Missions ID 248497 Strategic Objective: ICT 2009 4.2.1 Cognitive Systems, Interaction, Robotics
5. Underwater Manipulation
 Autonomous Robotic Manipulation (4/4) Pedro J Sanz sanzp@uji.es 5. Underwater Manipulation April 2010 Fundamentals of Robotics (UdG) 2 1 I-AUV DESIGN MECHATRONICS (Object Recovery) 2009 ENE FEB MAR ABR
Autonomous Robotic Manipulation (4/4) Pedro J Sanz sanzp@uji.es 5. Underwater Manipulation April 2010 Fundamentals of Robotics (UdG) 2 1 I-AUV DESIGN MECHATRONICS (Object Recovery) 2009 ENE FEB MAR ABR
Marine Robots and Dexterous Manipulation for Enabling Autonomous Underwater Multipurpose Intervention Missions
 OCT 2012 (FP7-ICT-248497) Marine Robots and Dexterous Manipulation for Enabling Autonomous Underwater Multipurpose Intervention Missions 2 ND FIELD TRAINING WORKSHOP ON UNDERWATER ROBOTICS INTERVENTION
OCT 2012 (FP7-ICT-248497) Marine Robots and Dexterous Manipulation for Enabling Autonomous Underwater Multipurpose Intervention Missions 2 ND FIELD TRAINING WORKSHOP ON UNDERWATER ROBOTICS INTERVENTION
2. Visually- Guided Grasping (3D)
") Autonomous Robotic Manipulation (3/4) Pedro J Sanz sanzp@uji.es 2. Visually- Guided Grasping (3D) April 2010 Fundamentals of Robotics (UdG) 2 1 Other approaches for finding 3D grasps Analyzing complete
Autonomous Robotic Manipulation (3/4) Pedro J Sanz sanzp@uji.es 2. Visually- Guided Grasping (3D) April 2010 Fundamentals of Robotics (UdG) 2 1 Other approaches for finding 3D grasps Analyzing complete
Winter School on Intervention Autonomous Underwater Vehicles
 Winter School on Intervention Autonomous Underwater Vehicles University of Girona, Spain 6 to 10th November 2017 2 /14 WELCOME Dear all participants, welcome to the first STRONG MAR winter school. The
Winter School on Intervention Autonomous Underwater Vehicles University of Girona, Spain 6 to 10th November 2017 2 /14 WELCOME Dear all participants, welcome to the first STRONG MAR winter school. The
Performance evaluation and benchmarking in EU-funded activities. ICRA May 2011
 Performance evaluation and benchmarking in EU-funded activities ICRA 2011 13 May 2011 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media European
Performance evaluation and benchmarking in EU-funded activities ICRA 2011 13 May 2011 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media European
The ARROWS Project: Underwater Robotic Systems for Archaeology
 The ARROWS Project: Underwater Robotic Systems for Archaeology Benedetto Allotta benedetto.allotta@unifi.it DIEF - Dept. of Industrial Engineering Florence MDM Lab Laboratory of Mechatronics and Dynamic
The ARROWS Project: Underwater Robotic Systems for Archaeology Benedetto Allotta benedetto.allotta@unifi.it DIEF - Dept. of Industrial Engineering Florence MDM Lab Laboratory of Mechatronics and Dynamic
CAPACITIES FOR TECHNOLOGY TRANSFER
 CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
Exploring Multimodal Interfaces For Underwater Intervention Systems
 Proceedings of the IEEE ICRA 2010 Workshop on Multimodal Human-Robot Interfaces Anchorage, Alaska, May, 2010 Exploring Multimodal Interfaces For Underwater Intervention Systems J. C. Garcia, M. Prats,
Proceedings of the IEEE ICRA 2010 Workshop on Multimodal Human-Robot Interfaces Anchorage, Alaska, May, 2010 Exploring Multimodal Interfaces For Underwater Intervention Systems J. C. Garcia, M. Prats,
The Oil & Gas Industry Requirements for Marine Robots of the 21st century
 The Oil & Gas Industry Requirements for Marine Robots of the 21st century www.eninorge.no Laura Gallimberti 20.06.2014 1 Outline Introduction: fast technology growth Overview underwater vehicles development
The Oil & Gas Industry Requirements for Marine Robots of the 21st century www.eninorge.no Laura Gallimberti 20.06.2014 1 Outline Introduction: fast technology growth Overview underwater vehicles development
Revised and extended. Accompanies this course pages heavier Perception treated more thoroughly. 1 - Introduction
 Topics to be Covered Coordinate frames and representations. Use of homogeneous transformations in robotics. Specification of position and orientation Manipulator forward and inverse kinematics Mobile Robots:
Topics to be Covered Coordinate frames and representations. Use of homogeneous transformations in robotics. Specification of position and orientation Manipulator forward and inverse kinematics Mobile Robots:
Intervention AUVs: The Next Challenge
 Preprints of the 19th World Congress The International Federation of Automatic Control Intervention AUVs: The Next Challenge Pere Ridao Marc Carreras David Ribas Pedro J. Sanz Gabriel Oliver Computer Vision
Preprints of the 19th World Congress The International Federation of Automatic Control Intervention AUVs: The Next Challenge Pere Ridao Marc Carreras David Ribas Pedro J. Sanz Gabriel Oliver Computer Vision
Developing a New Underwater Robot Arm for Shallow-Water Intervention
 Developing a New Underwater Robot Arm for Shallow-Water Intervention By José Javier Fernández, Mario Prats, Pedro J. Sanz, Juan Carlos García, Raul Marín, Mike Robinson, David Ribas, and Pere Ridao Anew
Developing a New Underwater Robot Arm for Shallow-Water Intervention By José Javier Fernández, Mario Prats, Pedro J. Sanz, Juan Carlos García, Raul Marín, Mike Robinson, David Ribas, and Pere Ridao Anew
Towards good experimental methodology for Unmanned Marine Vehicles: issues and experiences
 Towards good experimental methodology for Unmanned Marine Vehicles: issues and experiences M. Caccia Consiglio Nazionale delle Ricerche Istituto di Studi sui Sistemi Intelligenti per l Automazione Via
Towards good experimental methodology for Unmanned Marine Vehicles: issues and experiences M. Caccia Consiglio Nazionale delle Ricerche Istituto di Studi sui Sistemi Intelligenti per l Automazione Via
Eelume: A Resident Subsea IMR Vehicle. Peter Bennett Business Manager Subsea Kongsberg Maritime
 Eelume: A Resident Subsea IMR Vehicle Peter Bennett Business Manager Subsea Kongsberg Maritime Introducing Eelume Page 2 Page 3 Eelume: the Set Up LOOP Agreement Demanding customer Experience, Marketing
Eelume: A Resident Subsea IMR Vehicle Peter Bennett Business Manager Subsea Kongsberg Maritime Introducing Eelume Page 2 Page 3 Eelume: the Set Up LOOP Agreement Demanding customer Experience, Marketing
FP7 ICT Call 6: Cognitive Systems and Robotics
 FP7 ICT Call 6: Cognitive Systems and Robotics Information day Luxembourg, January 14, 2010 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media
FP7 ICT Call 6: Cognitive Systems and Robotics Information day Luxembourg, January 14, 2010 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media
Masatoshi Ishikawa, Akio Namiki, Takashi Komuro, and Idaku Ishii
 1ms Sensory-Motor Fusion System with Hierarchical Parallel Processing Architecture Masatoshi Ishikawa, Akio Namiki, Takashi Komuro, and Idaku Ishii Department of Mathematical Engineering and Information
1ms Sensory-Motor Fusion System with Hierarchical Parallel Processing Architecture Masatoshi Ishikawa, Akio Namiki, Takashi Komuro, and Idaku Ishii Department of Mathematical Engineering and Information
Marine Robotics. Alfredo Martins. Unmanned Autonomous Vehicles in Air Land and Sea. Politecnico Milano June 2016
 Marine Robotics Unmanned Autonomous Vehicles in Air Land and Sea Politecnico Milano June 2016 INESC TEC / ISEP Portugal alfredo.martins@inesctec.pt Tools 2 MOOS Mission Oriented Operating Suite 3 MOOS
Marine Robotics Unmanned Autonomous Vehicles in Air Land and Sea Politecnico Milano June 2016 INESC TEC / ISEP Portugal alfredo.martins@inesctec.pt Tools 2 MOOS Mission Oriented Operating Suite 3 MOOS
CMRE La Spezia, Italy
 Innovative Interoperable M&S within Extended Maritime Domain for Critical Infrastructure Protection and C-IED CMRE La Spezia, Italy Agostino G. Bruzzone 1,2, Alberto Tremori 1 1 NATO STO CMRE& 2 Genoa
Innovative Interoperable M&S within Extended Maritime Domain for Critical Infrastructure Protection and C-IED CMRE La Spezia, Italy Agostino G. Bruzzone 1,2, Alberto Tremori 1 1 NATO STO CMRE& 2 Genoa
Wednesday, October 29, :00-04:00pm EB: 3546D. TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof.
 Wednesday, October 29, 2014 02:00-04:00pm EB: 3546D TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof. Ning Xi ABSTRACT Mobile manipulators provide larger working spaces and more flexibility
Wednesday, October 29, 2014 02:00-04:00pm EB: 3546D TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof. Ning Xi ABSTRACT Mobile manipulators provide larger working spaces and more flexibility
Physics-Based Manipulation in Human Environments
 Vol. 31 No. 4, pp.353 357, 2013 353 Physics-Based Manipulation in Human Environments Mehmet R. Dogar Siddhartha S. Srinivasa The Robotics Institute, School of Computer Science, Carnegie Mellon University
Vol. 31 No. 4, pp.353 357, 2013 353 Physics-Based Manipulation in Human Environments Mehmet R. Dogar Siddhartha S. Srinivasa The Robotics Institute, School of Computer Science, Carnegie Mellon University
2. Publishable summary
 2. Publishable summary CogLaboration (Successful real World Human-Robot Collaboration: from the cognition of human-human collaboration to fluent human-robot collaboration) is a specific targeted research
2. Publishable summary CogLaboration (Successful real World Human-Robot Collaboration: from the cognition of human-human collaboration to fluent human-robot collaboration) is a specific targeted research
Visual Servoing. Charlie Kemp. 4632B/8803 Mobile Manipulation Lecture 8
 Visual Servoing Charlie Kemp 4632B/8803 Mobile Manipulation Lecture 8 From: http://www.hsi.gatech.edu/visitors/maps/ 4 th floor 4100Q M Building 167 First office on HSI side From: http://www.hsi.gatech.edu/visitors/maps/
Visual Servoing Charlie Kemp 4632B/8803 Mobile Manipulation Lecture 8 From: http://www.hsi.gatech.edu/visitors/maps/ 4 th floor 4100Q M Building 167 First office on HSI side From: http://www.hsi.gatech.edu/visitors/maps/
Information and Program
 Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Robotics Introduction Matteo Matteucci
 Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
Newsletter. Date: 16 th of February, 2017 Research Area: Robust and Flexible Automation (RA2)
") www.sfimanufacturing.no Newsletter Date: 16 th of February, 2017 Research Area: Robust and Flexible Automation (RA2) This newsletter is published prior to each workshop of SFI Manufacturing. The aim is
www.sfimanufacturing.no Newsletter Date: 16 th of February, 2017 Research Area: Robust and Flexible Automation (RA2) This newsletter is published prior to each workshop of SFI Manufacturing. The aim is
Che Keong Lee Sales Subsea Manager Kongsberg Maritime AS. Eelume: A Resident Subsea IMR Vehicle
 Che Keong Lee Sales Subsea Manager Kongsberg Maritime AS Eelume: A Resident Subsea IMR Vehicle Introducing Eelume Page 2 Page 3 Eelume: the Set Up LOOP Agreement Demanding customer Experience, Marketing
Che Keong Lee Sales Subsea Manager Kongsberg Maritime AS Eelume: A Resident Subsea IMR Vehicle Introducing Eelume Page 2 Page 3 Eelume: the Set Up LOOP Agreement Demanding customer Experience, Marketing
INESCTEC Marine Robotics Experience
 From Knowledge Generation To Science-based Innovation INESCTEC Marine Robotics Experience Aníbal Matos Robotics@ INESC TEC Universidade do Porto SEAS-ERA Workshop, Lisboa Sep 17-18, 2013 Research and Technological
From Knowledge Generation To Science-based Innovation INESCTEC Marine Robotics Experience Aníbal Matos Robotics@ INESC TEC Universidade do Porto SEAS-ERA Workshop, Lisboa Sep 17-18, 2013 Research and Technological
Journal of Theoretical and Applied Mechanics, Sofia, 2014, vol. 44, No. 1, pp ROBONAUT 2: MISSION, TECHNOLOGIES, PERSPECTIVES
 Journal of Theoretical and Applied Mechanics, Sofia, 2014, vol. 44, No. 1, pp. 97 102 SCIENTIFIC LIFE DOI: 10.2478/jtam-2014-0006 ROBONAUT 2: MISSION, TECHNOLOGIES, PERSPECTIVES Galia V. Tzvetkova Institute
Journal of Theoretical and Applied Mechanics, Sofia, 2014, vol. 44, No. 1, pp. 97 102 SCIENTIFIC LIFE DOI: 10.2478/jtam-2014-0006 ROBONAUT 2: MISSION, TECHNOLOGIES, PERSPECTIVES Galia V. Tzvetkova Institute
Eye-to-Hand Position Based Visual Servoing and Human Control Using Kinect Camera in ViSeLab Testbed
 Memorias del XVI Congreso Latinoamericano de Control Automático, CLCA 2014 Eye-to-Hand Position Based Visual Servoing and Human Control Using Kinect Camera in ViSeLab Testbed Roger Esteller-Curto*, Alberto
Memorias del XVI Congreso Latinoamericano de Control Automático, CLCA 2014 Eye-to-Hand Position Based Visual Servoing and Human Control Using Kinect Camera in ViSeLab Testbed Roger Esteller-Curto*, Alberto
Intervention AUVs: The Next Challenge
 Intervention AUVs: The Next Challenge Pere Ridao Marc Carreras David Ribas Pedro J. Sanz Gabriel Oliver Computer Vision and Robotics Research Institute Scientific and Technological Park of the University
Intervention AUVs: The Next Challenge Pere Ridao Marc Carreras David Ribas Pedro J. Sanz Gabriel Oliver Computer Vision and Robotics Research Institute Scientific and Technological Park of the University
PI: Rhoads. ERRoS: Energetic and Reactive Robotic Swarms
 ERRoS: Energetic and Reactive Robotic Swarms 1 1 Introduction and Background As articulated in a recent presentation by the Deputy Assistant Secretary of the Army for Research and Technology, the future
ERRoS: Energetic and Reactive Robotic Swarms 1 1 Introduction and Background As articulated in a recent presentation by the Deputy Assistant Secretary of the Army for Research and Technology, the future
Canadian Activities in Intelligent Robotic Systems - An Overview
 In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Canadian Activities in Intelligent Robotic
In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Canadian Activities in Intelligent Robotic
Responsive AUV Localization and Mapping Project. Ron Lewis, Project Manager June 14 th, 2012
 Responsive AUV Localization and Mapping Project Ron Lewis, Project Manager June 14 th, 2012 Project Overview Project duration: Approximately 5 Years June 1, 2010 to March 31, 2015 Primary objectives: Develop
Responsive AUV Localization and Mapping Project Ron Lewis, Project Manager June 14 th, 2012 Project Overview Project duration: Approximately 5 Years June 1, 2010 to March 31, 2015 Primary objectives: Develop
An Experiment in the Use of Manipulation Primitives and Tactile Perception for Reactive Grasping
 An Experiment in the Use of Manipulation Primitives and Tactile Perception for Reactive Grasping Antonio Morales, Mario Prats, Pedro Sanz and Angel P. Pobil Robotic Intelligence Lab Universitat Jaume I
An Experiment in the Use of Manipulation Primitives and Tactile Perception for Reactive Grasping Antonio Morales, Mario Prats, Pedro Sanz and Angel P. Pobil Robotic Intelligence Lab Universitat Jaume I
Mechatronics Project Report
 Mechatronics Project Report Introduction Robotic fish are utilized in the Dynamic Systems Laboratory in order to study and model schooling in fish populations, with the goal of being able to manage aquatic
Mechatronics Project Report Introduction Robotic fish are utilized in the Dynamic Systems Laboratory in order to study and model schooling in fish populations, with the goal of being able to manage aquatic
Robots at Work The growing role of robotic systems in the Oceans and Subsea Engineering. David Brookes Senior Advisor, Upstream Engineering, BP
 Robots at Work The growing role of robotic systems in the Oceans and Subsea Engineering David Brookes Senior Advisor, Upstream Engineering, BP Synopsis ROV s History Current Capabilities and Examples AUV
Robots at Work The growing role of robotic systems in the Oceans and Subsea Engineering David Brookes Senior Advisor, Upstream Engineering, BP Synopsis ROV s History Current Capabilities and Examples AUV
Automation at Depth: Ocean Infinity and seabed mapping using multiple AUVs
 Automation at Depth: Ocean Infinity and seabed mapping using multiple AUVs Ocean Infinity s seabed mapping campaign commenced in the summer of 2017. The Ocean Infinity team is made up of individuals from
Automation at Depth: Ocean Infinity and seabed mapping using multiple AUVs Ocean Infinity s seabed mapping campaign commenced in the summer of 2017. The Ocean Infinity team is made up of individuals from
DESIGN AND DEVELOPMENT OF LIBRARY ASSISTANT ROBOT
 DESIGN AND DEVELOPMENT OF LIBRARY ASSISTANT ROBOT Ranjani.R, M.Nandhini, G.Madhumitha Assistant Professor,Department of Mechatronics, SRM University,Kattankulathur,Chennai. ABSTRACT Library robot is an
DESIGN AND DEVELOPMENT OF LIBRARY ASSISTANT ROBOT Ranjani.R, M.Nandhini, G.Madhumitha Assistant Professor,Department of Mechatronics, SRM University,Kattankulathur,Chennai. ABSTRACT Library robot is an
Integrated Technology Concept for Robotic On-Orbit Servicing Systems
 Integrated Technology Concept for Robotic On-Orbit Servicing Systems Bernd Maediger, Airbus DS GmbH Bremen, Germany Visual-based navigation Manipulation Grasping Non-cooperative target GNC Visual-based
Integrated Technology Concept for Robotic On-Orbit Servicing Systems Bernd Maediger, Airbus DS GmbH Bremen, Germany Visual-based navigation Manipulation Grasping Non-cooperative target GNC Visual-based
A Course on Marine Robotic Systems: Theory to Practice. Full Programme
 A Course on Marine Robotic Systems: Theory to Practice 27-31 January, 2015 National Institute of Oceanography, Dona Paula, Goa Opening address by the Director of NIO Full Programme 1. Introduction and
A Course on Marine Robotic Systems: Theory to Practice 27-31 January, 2015 National Institute of Oceanography, Dona Paula, Goa Opening address by the Director of NIO Full Programme 1. Introduction and
H2020 RIA COMANOID H2020-RIA
 Ref. Ares(2016)2533586-01/06/2016 H2020 RIA COMANOID H2020-RIA-645097 Deliverable D4.1: Demonstrator specification report M6 D4.1 H2020-RIA-645097 COMANOID M6 Project acronym: Project full title: COMANOID
Ref. Ares(2016)2533586-01/06/2016 H2020 RIA COMANOID H2020-RIA-645097 Deliverable D4.1: Demonstrator specification report M6 D4.1 H2020-RIA-645097 COMANOID M6 Project acronym: Project full title: COMANOID
Creating a 3D environment map from 2D camera images in robotics
 Creating a 3D environment map from 2D camera images in robotics J.P. Niemantsverdriet jelle@niemantsverdriet.nl 4th June 2003 Timorstraat 6A 9715 LE Groningen student number: 0919462 internal advisor:
Creating a 3D environment map from 2D camera images in robotics J.P. Niemantsverdriet jelle@niemantsverdriet.nl 4th June 2003 Timorstraat 6A 9715 LE Groningen student number: 0919462 internal advisor:
DiVA Digitala Vetenskapliga Arkivet
 DiVA Digitala Vetenskapliga Arkivet http://umu.diva-portal.org This is a paper presented at First International Conference on Robotics and associated Hightechnologies and Equipment for agriculture, RHEA-2012,
DiVA Digitala Vetenskapliga Arkivet http://umu.diva-portal.org This is a paper presented at First International Conference on Robotics and associated Hightechnologies and Equipment for agriculture, RHEA-2012,
Intelligent Sensor Platforms for Remotely Piloted and Unmanned Vehicles. Dr. Nick Krouglicof 14 June 2012
 Intelligent Sensor Platforms for Remotely Piloted and Unmanned Vehicles Dr. Nick Krouglicof 14 June 2012 Project Overview Project Duration September 1, 2010 to June 30, 2016 Primary objective(s) / outcomes
Intelligent Sensor Platforms for Remotely Piloted and Unmanned Vehicles Dr. Nick Krouglicof 14 June 2012 Project Overview Project Duration September 1, 2010 to June 30, 2016 Primary objective(s) / outcomes
New Approach for a ReconfigurabJe Autonomous Underwater Vehicle for Intervention
 New Approach for a ReconfigurabJe Autonomous Underwater Vehicle for Intervention G. De Novi, C. Melehiorri LAR-DEIS, UNIBO J.C. Garcia, P.J. Saoz RoblnLab, UJI P. Rldao V1COROB, UdG & G. Oliver SRV, UIB
New Approach for a ReconfigurabJe Autonomous Underwater Vehicle for Intervention G. De Novi, C. Melehiorri LAR-DEIS, UNIBO J.C. Garcia, P.J. Saoz RoblnLab, UJI P. Rldao V1COROB, UdG & G. Oliver SRV, UIB
Robotics in Oil and Gas. Matt Ondler President / CEO
 Robotics in Oil and Gas Matt Ondler President / CEO 1 Agenda Quick background on HMI State of robotics Sampling of robotics projects in O&G Example of a transformative robotic application Future of robotics
Robotics in Oil and Gas Matt Ondler President / CEO 1 Agenda Quick background on HMI State of robotics Sampling of robotics projects in O&G Example of a transformative robotic application Future of robotics
Adaptive Touch Sampling for Energy-Efficient Mobile Platforms
 Adaptive Touch Sampling for Energy-Efficient Mobile Platforms Kyungtae Han Intel Labs, USA Alexander W. Min, Dongho Hong, Yong-joon Park Intel Corporation, USA April 16, 2015 Touch Interface in Today s
Adaptive Touch Sampling for Energy-Efficient Mobile Platforms Kyungtae Han Intel Labs, USA Alexander W. Min, Dongho Hong, Yong-joon Park Intel Corporation, USA April 16, 2015 Touch Interface in Today s
Overview of Challenges in the Development of Autonomous Mobile Robots. August 23, 2011
 Overview of Challenges in the Development of Autonomous Mobile Robots August 23, 2011 What is in a Robot? Sensors Effectors and actuators (i.e., mechanical) Used for locomotion and manipulation Controllers
Overview of Challenges in the Development of Autonomous Mobile Robots August 23, 2011 What is in a Robot? Sensors Effectors and actuators (i.e., mechanical) Used for locomotion and manipulation Controllers
Assessment of Smart Machines and Manufacturing Competence Centre (SMACC) Scientific Advisory Board Site Visit April 2018.
 Scientific Advisory Board Site Visit April 2018.") Assessment of Smart Machines and Manufacturing Competence Centre (SMACC) Scientific Advisory Board Site Visit 25-27 April 2018 Assessment Report 1. Scientific ambition, quality and impact Rating: 3.5 The
Assessment of Smart Machines and Manufacturing Competence Centre (SMACC) Scientific Advisory Board Site Visit 25-27 April 2018 Assessment Report 1. Scientific ambition, quality and impact Rating: 3.5 The
Tool Chains for Simulation and Experimental Validation of Orbital Robotic Technologies
 DLR.de Chart 1 > The Next Generation of Space Robotic Servicing Technologies > Ch. Borst Exploration of Orbital Robotic Technologies > 26.05.2015 Tool Chains for Simulation and Experimental Validation
DLR.de Chart 1 > The Next Generation of Space Robotic Servicing Technologies > Ch. Borst Exploration of Orbital Robotic Technologies > 26.05.2015 Tool Chains for Simulation and Experimental Validation
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute State one reason for investigating and building humanoid robot (4 pts) List two
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute State one reason for investigating and building humanoid robot (4 pts) List two
Robotic Technology for Port and Maritime Automation
 Industrial/Service Robots Field Robots Robotic Technology for Port and Maritime Automation Presenter: Assoc Prof Chen I-Ming Director, Robotics Research Center & Intelligent Systems Center School of Mechanical
Industrial/Service Robots Field Robots Robotic Technology for Port and Maritime Automation Presenter: Assoc Prof Chen I-Ming Director, Robotics Research Center & Intelligent Systems Center School of Mechanical
Autonomous Mobile Robot Design. Dr. Kostas Alexis (CSE)
") Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
ARCHITECTURE AND MODEL OF DATA INTEGRATION BETWEEN MANAGEMENT SYSTEMS AND AGRICULTURAL MACHINES FOR PRECISION AGRICULTURE
 ARCHITECTURE AND MODEL OF DATA INTEGRATION BETWEEN MANAGEMENT SYSTEMS AND AGRICULTURAL MACHINES FOR PRECISION AGRICULTURE W. C. Lopes, R. R. D. Pereira, M. L. Tronco, A. J. V. Porto NepAS [Center for Teaching
ARCHITECTURE AND MODEL OF DATA INTEGRATION BETWEEN MANAGEMENT SYSTEMS AND AGRICULTURAL MACHINES FOR PRECISION AGRICULTURE W. C. Lopes, R. R. D. Pereira, M. L. Tronco, A. J. V. Porto NepAS [Center for Teaching
Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Politecnico di Milano - Dipartimento di Elettronica, Informazione e Bioingegneria Industrial robotics
Available theses in industrial robotics (October 2016) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Politecnico di Milano - Dipartimento di Elettronica, Informazione e Bioingegneria Industrial robotics
Multi-Agent Planning
 25 PRICAI 2000 Workshop on Teams with Adjustable Autonomy PRICAI 2000 Workshop on Teams with Adjustable Autonomy Position Paper Designing an architecture for adjustably autonomous robot teams David Kortenkamp
25 PRICAI 2000 Workshop on Teams with Adjustable Autonomy PRICAI 2000 Workshop on Teams with Adjustable Autonomy Position Paper Designing an architecture for adjustably autonomous robot teams David Kortenkamp
Ocean/Marine Engineering and Naval Architecture Research and Education Experience and Capacity at Canadian Universities
 Ocean/Marine Engineering and Naval Architecture Research and Education Experience and Capacity at Canadian Universities Wei Qiu, Memorial University Andrew Gerber, University of New Brunswick Jason Gu,
Ocean/Marine Engineering and Naval Architecture Research and Education Experience and Capacity at Canadian Universities Wei Qiu, Memorial University Andrew Gerber, University of New Brunswick Jason Gu,
Vision-based Localization and Mapping with Heterogeneous Teams of Ground and Micro Flying Robots
 Vision-based Localization and Mapping with Heterogeneous Teams of Ground and Micro Flying Robots Davide Scaramuzza Robotics and Perception Group University of Zurich http://rpg.ifi.uzh.ch All videos in
Vision-based Localization and Mapping with Heterogeneous Teams of Ground and Micro Flying Robots Davide Scaramuzza Robotics and Perception Group University of Zurich http://rpg.ifi.uzh.ch All videos in
Navigation of an Autonomous Underwater Vehicle in a Mobile Network
 Navigation of an Autonomous Underwater Vehicle in a Mobile Network Nuno Santos, Aníbal Matos and Nuno Cruz Faculdade de Engenharia da Universidade do Porto Instituto de Sistemas e Robótica - Porto Rua
Navigation of an Autonomous Underwater Vehicle in a Mobile Network Nuno Santos, Aníbal Matos and Nuno Cruz Faculdade de Engenharia da Universidade do Porto Instituto de Sistemas e Robótica - Porto Rua
Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free Human Following Navigation in Outdoor Environment
 Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
Autonomous Localization
 Autonomous Localization Jennifer Zheng, Maya Kothare-Arora I. Abstract This paper presents an autonomous localization service for the Building-Wide Intelligence segbots at the University of Texas at Austin.
Autonomous Localization Jennifer Zheng, Maya Kothare-Arora I. Abstract This paper presents an autonomous localization service for the Building-Wide Intelligence segbots at the University of Texas at Austin.
Subsea Monitoring & Mapping
 Subsea Monitoring & Mapping Arnold Hechanova & Dave Fraser ITAC Meeting 2016 Woods Hole Oceanographic Institute, MA Overview Program Objective: Develop sensors to detect loss of containment subsea and
Subsea Monitoring & Mapping Arnold Hechanova & Dave Fraser ITAC Meeting 2016 Woods Hole Oceanographic Institute, MA Overview Program Objective: Develop sensors to detect loss of containment subsea and
Team Kanaloa: research initiatives and the Vertically Integrated Project (VIP) development paradigm
 development paradigm") Additive Manufacturing Renewable Energy and Energy Storage Astronomical Instruments and Precision Engineering Team Kanaloa: research initiatives and the Vertically Integrated Project (VIP) development
Additive Manufacturing Renewable Energy and Energy Storage Astronomical Instruments and Precision Engineering Team Kanaloa: research initiatives and the Vertically Integrated Project (VIP) development
UTOFIA System 1 test on a Unmanned Surface Vehicle
 Newsletter #4 March 2017 UTOFIA System 1 test on a Unmanned Surface Vehicle The test was performed in harbor environment in Marseilles France. Our 2 nd prototype (UTOFIA system 1) went on extensive sea
Newsletter #4 March 2017 UTOFIA System 1 test on a Unmanned Surface Vehicle The test was performed in harbor environment in Marseilles France. Our 2 nd prototype (UTOFIA system 1) went on extensive sea
Learning Probabilistic Models for Mobile Manipulation Robots
 Proceedings of the Twenty-Third International Joint Conference on Artificial Intelligence Learning Probabilistic Models for Mobile Manipulation Robots Jürgen Sturm and Wolfram Burgard University of Freiburg
Proceedings of the Twenty-Third International Joint Conference on Artificial Intelligence Learning Probabilistic Models for Mobile Manipulation Robots Jürgen Sturm and Wolfram Burgard University of Freiburg
ROBO-SPECT ROBO-SPECT NEWS. Editorial 1 PROJECT FACTS. In This Issue
 NEWS ROBOtic System with Intelligent Vision and Control for Tunnel Structural INSPECTion and Evaluation Issue 6 September 2016 Editorial Welcome to this 's sixth newsletter. is a European 7th Framework
NEWS ROBOtic System with Intelligent Vision and Control for Tunnel Structural INSPECTion and Evaluation Issue 6 September 2016 Editorial Welcome to this 's sixth newsletter. is a European 7th Framework
Ground Robotics Capability Conference and Exhibit. Mr. George Solhan Office of Naval Research Code March 2010
 Ground Robotics Capability Conference and Exhibit Mr. George Solhan Office of Naval Research Code 30 18 March 2010 1 S&T Focused on Naval Needs Broad FY10 DON S&T Funding = $1,824M Discovery & Invention
Ground Robotics Capability Conference and Exhibit Mr. George Solhan Office of Naval Research Code 30 18 March 2010 1 S&T Focused on Naval Needs Broad FY10 DON S&T Funding = $1,824M Discovery & Invention
Cognitive Robotics 2016/2017
 Cognitive Robotics 2016/2017 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Cognitive Robotics 2016/2017 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
A Very High Level Interface to Teleoperate a Robot via Web including Augmented Reality
 A Very High Level Interface to Teleoperate a Robot via Web including Augmented Reality R. Marín, P. J. Sanz and J. S. Sánchez Abstract The system consists of a multirobot architecture that gives access
A Very High Level Interface to Teleoperate a Robot via Web including Augmented Reality R. Marín, P. J. Sanz and J. S. Sánchez Abstract The system consists of a multirobot architecture that gives access
Lecture: Allows operation in enviroment without prior knowledge
 Lecture: SLAM Lecture: Is it possible for an autonomous vehicle to start at an unknown environment and then to incrementally build a map of this enviroment while simulaneous using this map for vehicle
Lecture: SLAM Lecture: Is it possible for an autonomous vehicle to start at an unknown environment and then to incrementally build a map of this enviroment while simulaneous using this map for vehicle
SAFE TO SEA (S2S) FOR THE SAFETY OF NAVIGTION.
 FOR THE SAFETY OF NAVIGTION.") SAFE TO SEA (S2S) FOR THE SAFETY OF NAVIGTION. GRAFINTA.S.A. Company founded in 1964 and located in Madrid. With 11 people on our payroll from which 8 are engineers specialized in new technologies and
SAFE TO SEA (S2S) FOR THE SAFETY OF NAVIGTION. GRAFINTA.S.A. Company founded in 1964 and located in Madrid. With 11 people on our payroll from which 8 are engineers specialized in new technologies and
May Edited by: Roemi E. Fernández Héctor Montes
 May 2016 Edited by: Roemi E. Fernández Héctor Montes RoboCity16 Open Conference on Future Trends in Robotics Editors Roemi E. Fernández Saavedra Héctor Montes Franceschi Madrid, 26 May 2016 Edited by:
May 2016 Edited by: Roemi E. Fernández Héctor Montes RoboCity16 Open Conference on Future Trends in Robotics Editors Roemi E. Fernández Saavedra Héctor Montes Franceschi Madrid, 26 May 2016 Edited by:
MarineSIM : Robot Simulation for Marine Environments
 MarineSIM : Robot Simulation for Marine Environments P.G.C.Namal Senarathne, Wijerupage Sardha Wijesoma,KwangWeeLee, Bharath Kalyan, Moratuwage M.D.P, Nicholas M. Patrikalakis, Franz S. Hover School of
MarineSIM : Robot Simulation for Marine Environments P.G.C.Namal Senarathne, Wijerupage Sardha Wijesoma,KwangWeeLee, Bharath Kalyan, Moratuwage M.D.P, Nicholas M. Patrikalakis, Franz S. Hover School of
Automation and Control Electrical Engineering
 Automation and Control Electrical Engineering Technical University of Denmark DTU-Building 326 DK-2800 Kgs. Lyngby Denmark aut.elektro.dtu.dk Ole Ravn Total students ~9.300 including Ph.D. 1.150 and Int.
Automation and Control Electrical Engineering Technical University of Denmark DTU-Building 326 DK-2800 Kgs. Lyngby Denmark aut.elektro.dtu.dk Ole Ravn Total students ~9.300 including Ph.D. 1.150 and Int.
Bruno Siciliano Luigi Villani Vincenzo Lippiello. Francesca Cordella Mariacarla Staffa.
 1/20 Robotics @ PRISMA Lab Bruno Siciliano Luigi Villani Vincenzo Lippiello Fanny Ficuciello i Fabio Ruggiero Francesca Cordella Mariacarla Staffa www.prisma.unina.it i it 18 February 2010 City 1,200,000
1/20 Robotics @ PRISMA Lab Bruno Siciliano Luigi Villani Vincenzo Lippiello Fanny Ficuciello i Fabio Ruggiero Francesca Cordella Mariacarla Staffa www.prisma.unina.it i it 18 February 2010 City 1,200,000
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
SECOND YEAR PROJECT SUMMARY
 SECOND YEAR PROJECT SUMMARY Grant Agreement number: 215805 Project acronym: Project title: CHRIS Cooperative Human Robot Interaction Systems Period covered: from 01 March 2009 to 28 Feb 2010 Contact Details
SECOND YEAR PROJECT SUMMARY Grant Agreement number: 215805 Project acronym: Project title: CHRIS Cooperative Human Robot Interaction Systems Period covered: from 01 March 2009 to 28 Feb 2010 Contact Details
Cognitive robots and emotional intelligence Cloud robotics Ethical, legal and social issues of robotic Construction robots Human activities in many
 Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
AUTONOMOUS UNDERWATER VEHICLE Introductory Session. January 07, 2017 IITK
 AUTONOMOUS UNDERWATER VEHICLE Introductory Session January 07, 2017 IITK Purpose of an AUV Pluto Plus AUV Remus AUV Battlespace Preparation AUV Cornell AUV: Gemini COMMERCIAL Maps of Seafloor Building
AUTONOMOUS UNDERWATER VEHICLE Introductory Session January 07, 2017 IITK Purpose of an AUV Pluto Plus AUV Remus AUV Battlespace Preparation AUV Cornell AUV: Gemini COMMERCIAL Maps of Seafloor Building
Research Proposal: Autonomous Mobile Robot Platform for Indoor Applications :xwgn zrvd ziad mipt ineyiil zinepehe`e zciip ziheaex dnxethlt
 Research Proposal: Autonomous Mobile Robot Platform for Indoor Applications :xwgn zrvd ziad mipt ineyiil zinepehe`e zciip ziheaex dnxethlt Igal Loevsky, advisor: Ilan Shimshoni email: igal@tx.technion.ac.il
Research Proposal: Autonomous Mobile Robot Platform for Indoor Applications :xwgn zrvd ziad mipt ineyiil zinepehe`e zciip ziheaex dnxethlt Igal Loevsky, advisor: Ilan Shimshoni email: igal@tx.technion.ac.il
Using Norwegian competence from oil and gas subsea operations towards the development of ocean mining operations
 Using Norwegian competence from oil and gas subsea operations towards the development of ocean mining operations Yoshinori Miura, Jens Laugesen, Øyvind Fjukmoen, Lucy Brooks, Karsten Hagenah, Tor Jensen
Using Norwegian competence from oil and gas subsea operations towards the development of ocean mining operations Yoshinori Miura, Jens Laugesen, Øyvind Fjukmoen, Lucy Brooks, Karsten Hagenah, Tor Jensen
ROBOTIC MANIPULATION AND HAPTIC FEEDBACK VIA HIGH SPEED MESSAGING WITH THE JOINT ARCHITECTURE FOR UNMANNED SYSTEMS (JAUS)
") ROBOTIC MANIPULATION AND HAPTIC FEEDBACK VIA HIGH SPEED MESSAGING WITH THE JOINT ARCHITECTURE FOR UNMANNED SYSTEMS (JAUS) Dr. Daniel Kent, * Dr. Thomas Galluzzo*, Dr. Paul Bosscher and William Bowman INTRODUCTION
ROBOTIC MANIPULATION AND HAPTIC FEEDBACK VIA HIGH SPEED MESSAGING WITH THE JOINT ARCHITECTURE FOR UNMANNED SYSTEMS (JAUS) Dr. Daniel Kent, * Dr. Thomas Galluzzo*, Dr. Paul Bosscher and William Bowman INTRODUCTION
Timothy H. Chung EDUCATION RESEARCH
 Timothy H. Chung MC 104-44, Pasadena, CA 91125, USA Email: timothyc@caltech.edu Phone: 626-221-0251 (cell) Web: http://robotics.caltech.edu/ timothyc EDUCATION Ph.D., Mechanical Engineering May 2007 Thesis:
Timothy H. Chung MC 104-44, Pasadena, CA 91125, USA Email: timothyc@caltech.edu Phone: 626-221-0251 (cell) Web: http://robotics.caltech.edu/ timothyc EDUCATION Ph.D., Mechanical Engineering May 2007 Thesis:
High Resolution Optical Imaging for Deep Water Archaeology
 High Resolution Optical Imaging for Deep Water Archaeology Hanumant Singh 1, Christopher Roman 1, Oscar Pizarro 2, Brendan Foley 1, Ryan Eustice 1, Ali Can 3 1 Dept of Applied Ocean Physics and Engineering,
High Resolution Optical Imaging for Deep Water Archaeology Hanumant Singh 1, Christopher Roman 1, Oscar Pizarro 2, Brendan Foley 1, Ryan Eustice 1, Ali Can 3 1 Dept of Applied Ocean Physics and Engineering,
COE CST First Annual Technical Meeting: Autonomous Rendezvous & Docking Penina Axelrad. Federal Aviation. Administration.
 Administration COE CST First Annual Technical Meeting: Autonomous Rendezvous & Docking Penina Axelrad November 10, 2011 Administration 1 Overview Team Members Purpose of Task Research Methodology Results
Administration COE CST First Annual Technical Meeting: Autonomous Rendezvous & Docking Penina Axelrad November 10, 2011 Administration 1 Overview Team Members Purpose of Task Research Methodology Results
Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation
 Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation Hiroshi Ishiguro Department of Information Science, Kyoto University Sakyo-ku, Kyoto 606-01, Japan E-mail: ishiguro@kuis.kyoto-u.ac.jp
Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation Hiroshi Ishiguro Department of Information Science, Kyoto University Sakyo-ku, Kyoto 606-01, Japan E-mail: ishiguro@kuis.kyoto-u.ac.jp
Available theses (October 2011) MERLIN Group
 MERLIN Group") Available theses (October 2011) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Available theses (October 2011) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
HMM-based Error Recovery of Dance Step Selection for Dance Partner Robot
 27 IEEE International Conference on Robotics and Automation Roma, Italy, 1-14 April 27 ThA4.3 HMM-based Error Recovery of Dance Step Selection for Dance Partner Robot Takahiro Takeda, Yasuhisa Hirata,
27 IEEE International Conference on Robotics and Automation Roma, Italy, 1-14 April 27 ThA4.3 HMM-based Error Recovery of Dance Step Selection for Dance Partner Robot Takahiro Takeda, Yasuhisa Hirata,
MATLAB is a high-level programming language, extensively
 1 KUKA Sunrise Toolbox: Interfacing Collaborative Robots with MATLAB Mohammad Safeea and Pedro Neto Abstract Collaborative robots are increasingly present in our lives. The KUKA LBR iiwa equipped with
1 KUKA Sunrise Toolbox: Interfacing Collaborative Robots with MATLAB Mohammad Safeea and Pedro Neto Abstract Collaborative robots are increasingly present in our lives. The KUKA LBR iiwa equipped with
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
Easy Robot Software. And the MoveIt! Setup Assistant 2.0. Dave Coleman, PhD davetcoleman
 Easy Robot Software And the MoveIt! Setup Assistant 2.0 Reducing the Barrier to Entry of Complex Robotic Software: a MoveIt! Case Study David Coleman, Ioan Sucan, Sachin Chitta, Nikolaus Correll Journal
Easy Robot Software And the MoveIt! Setup Assistant 2.0 Reducing the Barrier to Entry of Complex Robotic Software: a MoveIt! Case Study David Coleman, Ioan Sucan, Sachin Chitta, Nikolaus Correll Journal
Behaviour-Based Control. IAR Lecture 5 Barbara Webb
 Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Mobile Robot Platform for Improving Experience of Learning Programming Languages
 Journal of Automation and Control Engineering Vol. 2, No. 3, September 2014 Mobile Robot Platform for Improving Experience of Learning Programming Languages Jun Su Park and Artem Lenskiy The Department
Journal of Automation and Control Engineering Vol. 2, No. 3, September 2014 Mobile Robot Platform for Improving Experience of Learning Programming Languages Jun Su Park and Artem Lenskiy The Department
Robo$cs Introduc$on. ROS Workshop. Faculty of Informa$on Technology, Brno University of Technology Bozetechova 2, Brno
 Robo$cs Introduc$on ROS Workshop Faculty of Informa$on Technology, Brno University of Technology Bozetechova 2, 612 66 Brno name@fit.vutbr.cz What is a Robot? a programmable, mul.func.on manipulator USA
Robo$cs Introduc$on ROS Workshop Faculty of Informa$on Technology, Brno University of Technology Bozetechova 2, 612 66 Brno name@fit.vutbr.cz What is a Robot? a programmable, mul.func.on manipulator USA
Traffic Control for a Swarm of Robots: Avoiding Group Conflicts
 Traffic Control for a Swarm of Robots: Avoiding Group Conflicts Leandro Soriano Marcolino and Luiz Chaimowicz Abstract A very common problem in the navigation of robotic swarms is when groups of robots
Traffic Control for a Swarm of Robots: Avoiding Group Conflicts Leandro Soriano Marcolino and Luiz Chaimowicz Abstract A very common problem in the navigation of robotic swarms is when groups of robots
Cognitive Robotics 2017/2018
 Cognitive Robotics 2017/2018 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Cognitive Robotics 2017/2018 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
A simple embedded stereoscopic vision system for an autonomous rover
 In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 A simple embedded stereoscopic vision
In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 A simple embedded stereoscopic vision
Unmanned Maritime Vehicle (UMV) Test & Evaluation Conference
 Test & Evaluation Conference") Unmanned Maritime Vehicle (UMV) Test & Evaluation Conference Future Technology Development and Assessment for UUV Acquisition James Griffin NUWCDIVNPT Autonomous Systems and Technology Department T&E is
Unmanned Maritime Vehicle (UMV) Test & Evaluation Conference Future Technology Development and Assessment for UUV Acquisition James Griffin NUWCDIVNPT Autonomous Systems and Technology Department T&E is
MIMO Transceiver Systems on AUVs
 MIMO Transceiver Systems on AUVs Mohsen Badiey 107 Robinson Hall College of Marine and Earth Studies, phone: (302) 831-3687 fax: (302) 831-6521 email: badiey@udel.edu Aijun Song 114 Robinson Hall College
MIMO Transceiver Systems on AUVs Mohsen Badiey 107 Robinson Hall College of Marine and Earth Studies, phone: (302) 831-3687 fax: (302) 831-6521 email: badiey@udel.edu Aijun Song 114 Robinson Hall College