Marine Robotics. Alfredo Martins. Unmanned Autonomous Vehicles in Air Land and Sea. Politecnico Milano June 2016
|
|
|
- Ariel Holmes
- 5 years ago
- Views:
Transcription

1 Marine Robotics Unmanned Autonomous Vehicles in Air Land and Sea Politecnico Milano June 2016 INESC TEC / ISEP Portugal alfredo.martins@inesctec.pt
2 Tools 2
3 MOOS Mission Oriented Operating Suite 3
4 MOOS Developed by P. Newman at MIT for marine applications Centralized communications (MOOSDB) 2 repositories (Oxford and MIT) Several applications for marine missions (viewers, simulation, mission control, vehicle control, navigation) Ready to use in marine applications With relative large userbase in the marine robotics community Object oriented (C++) classes 4

5 MOOS and MOOS IvP 5
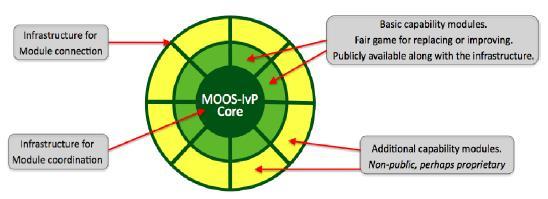
6 6

7 MOOS MOOS community collection of MOOS applications running on a single machine with a separate process ID Independent processes, possibly running at different frequencies Communications through a MOOSDB (publish-subscriber) 7
8 MOOS example 8
9 MOOSDB Star topology each MOOS community application with a connection with a single MOOS Database No peer to peer communications All communication instigated by client Each client (MOOSApp) has a unique name A client does not need to know of the existence of others Network can be distributed over multiple machines 9
 and vehicle control")
10 MOOS design Backseat design philosophy Separation from vehicle autonomy (mission oriented) and vehicle control 10

11 MOOS IvP Helm single MOOS app running process phelmivp IvP Interval Programming Behavior based architecture IvP solver multi-objective optimization to find the best action in each iteration of helm One to four times per second Only one subset of behaviors active in each time 11
12 MOOS Mission 12
13 MOOS communication architecture 13
14 MOOS comms Each application Publishes data issue notification on named data Register for notifications on named data (subscription) Collect notifications on named data User code calls Notify() to transmit data User code can retrieve the list of messages at any time with Fetch() 14

15 MOOS Message content Data sent in string or doubles Packed in messages CMOOSMsg class String data comma separated name = value pairs - Human readable 15
 repetitively (user should provide content OnNewMail() newly received")
16 MOOS CMOOSApp CMOOSApp base class for writing new applications It calls Iterate() repetitively (user should provide content OnNewMail() newly received data 16
")
17 Multiple vehicles (ufield Toolbox) 17
18 MOOS apps and terminal output AppCasting Providing easer to see aplication terminal output Optional feature Prodies an aditional report published to MOOSDB Ease of viewing multiple applications with one veiewer (AppCast Viewer) 18
19 Multiple vehicles 19
20 20
21 MOOS multiple communities 21

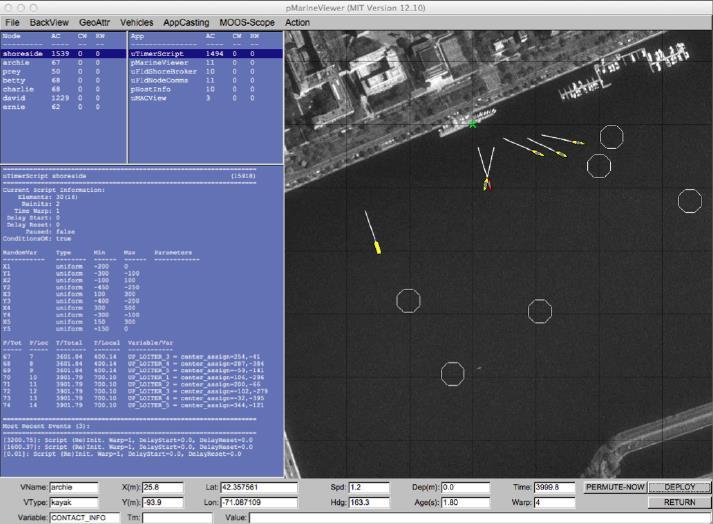
22 Mission control and monitoring: pmarineviewer 22

23 pmarineviewer typical use 23
24 MOOS source tree 24
25 Marine Robotics Simulation 25
26 Marine robotic systems simulation Detailed dynamic simulation CFD, (panel methods) WAMIT, Ansys, Fluent Generic system simulation MATLAB/Simulink ( MSS toolbox, other matlab tooboxes) Robotics Simulators UWSim MORSE / Blender Gazebo 26
 MSS FDI standalone toolbox for identification of radiation-force models and fluid memory effects (seakeeping")
27 Marine Systems Simulator (MSS) Matlab/Simulink toolbox developed at NTNU Components MSS GNC guidance, navigation and control library (the most useful component) MSS HYDRO reads info from potential theory programs generating data for Matlab simulation (requires ShipX or WAMIT license) MSS FDI standalone toolbox for identification of radiation-force models and fluid memory effects (seakeeping theory) 27
28 MSS MSS GNC Simulink Library Controllers Wave and wind generation Guidance blocks Vehicle models and utilities Observers and navigation filters 28 [1] T. Perez et al, An Overview of Marine Systems Simulator (MSS): A Simulink Toolbox for Marine Control Systems, Modeling, identification and Control 27.4, pp , 2006,

29 Other toolboxes: Aerospace Blockset Simulink blockset for aerospace applications (Mathworks) Provides useful models and block utilities for simulation of vehicle motion also usable in marine environment 29



30 Other toolboxes:peter Corke s Robotics and Machine Vision Toolboxes Robotics toolboxes developed by Prof. Peter Corke from QUT Robotics toolbox Coordinate conversion utilities Planning and localization tools for mainly for manipulator and ground vehicles Machine vision toolbox Useful toolbox in computer vision Implements common tools with the standard Matlab Image Processing Toolbox and also additional functions Useful companion to the book: Robotics, Vision and Control 30
31 Robotic Simulators Generic simulators for robotics development Sensors and environment simulation From high detail in physical dynamic simulations to basic simple kinematic models Some allow hardware in the loop simulation Interfaces to common robotics middleware Examples USARSIM Player/Stage Webots Gazebo MORSE 31
32 Simulators for underwater robotics Few attention has been dedicated to the underwater or marine environment Marine robotic sensor models such as sonars are in general not developed Some simulators Gazebo V-REP MORSE/Blender UWSim 32
 robots environment Multiple interfaces plugins (C++ code making the interface and shared")
33 Gazebo 3D simulator Recent developments from DARPA robotics challenge Linux environment Modular architecture Google protobufs for communications between modules) 3D simulation with OGRE3D Simulator independent from visualization Simulation description in a definition file: SDF (Simulation Definition File) robots environment Multiple interfaces plugins (C++ code making the interface and shared linking) ROS (plugins ROS) gazebosim.org 33


34 Gazebo gazebo server communication management controls physics simulation loop generates sensor readings gazebo client user graphic interface 34
; The rendering is based on Blender Game")

35 Morse 3D Simulation of indoor and outdoor environments; Provides several robots, sensors and actuators; Support different middlewares used in robotics (ROS, Sockets, MOOS and YARP); The rendering is based on Blender Game Engine; Realistic gathered data is possible through addition of gaussian noise to sensors outputs Licensed under a permissive BSD license; Considerable community Good documentation - tutorials, code examples, reusable snippets, etc. 35

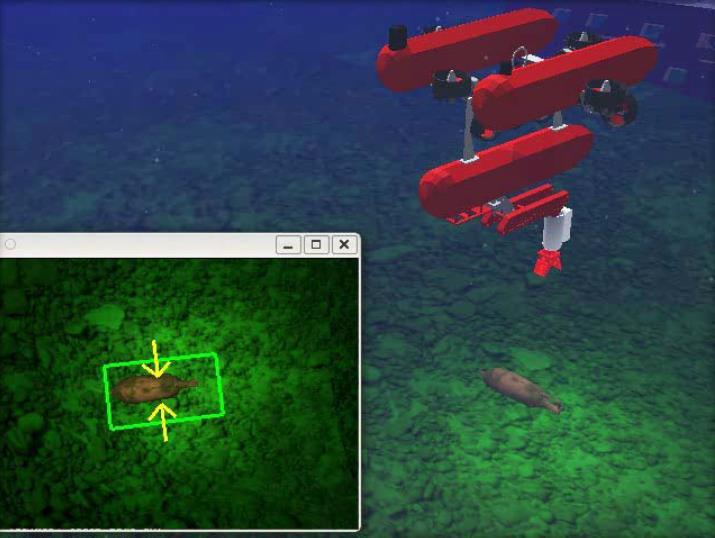
36 UWSim Underwater simulator developed by IRS Lab of Jaume-I University, Madrid Developed under the RAUVI and TRIDENT projects Uses OSG (Open Scene Graph) Simulates underwater environments Configurable environment Multiple robot Underwater manipulators Common underwater sensors Camera Pressure DVL GPS Multibeam sonar Structured light projector ROS interface
![UWSim Architecture UWSim architecture, from [1] [1] M.](/docs-images/83/88926582/images/37-3.jpg "Prats, et al, An open source tool for simulation and supervision of underwater intervention")
37 UWSim Architecture UWSim architecture, from [1] [1] M. Prats, et al, An open source tool for simulation and supervision of underwater intervention missions, IEEE IROS Conference,
38 UWSim 38

39 UWSim Practical Introduction 39

40 Interacting with UWSIM Start a roscore >> roscore Start UWSim >> rosrun uwsim uwsim You should get something like this 40
 >> rosrun uwsim setvehicleposition /datanavigator 2 0 3 0 0 0 You should get something like")
41 Interacting with UWSIM Check the list of ROS topics available >> rostopic list Set a new Vehicle Position (x=2, y=0, z=3, roll, pitch, yaw=0) >> rosrun uwsim setvehicleposition /datanavigator You should get something like this 41
42 Task I Simulation Vehicle Dynamics Start a roslaunch >> cd /catkin_ws >> source setup.bash >> roslaunch underwater_vehicle_dynamics UWSim_g500_dynamics.launch Use the control by keyboard Use the keys to control: 42
43 Task II- ROS interface Step 1. Compile a ROS node to send reference commands to G500 thrusters Step 2. Implement guidance controllers for the vehicle (ex. Similar to the ones previously tested in Matlab/Simulink) 43
Middleware and Software Frameworks in Robotics Applicability to Small Unmanned Vehicles
 Applicability to Small Unmanned Vehicles Daniel Serrano Department of Intelligent Systems, ASCAMM Technology Center Parc Tecnològic del Vallès, Av. Universitat Autònoma, 23 08290 Cerdanyola del Vallès
Applicability to Small Unmanned Vehicles Daniel Serrano Department of Intelligent Systems, ASCAMM Technology Center Parc Tecnològic del Vallès, Av. Universitat Autònoma, 23 08290 Cerdanyola del Vallès
ROS Tutorial. Me133a Joseph & Daniel 11/01/2017
 ROS Tutorial Me133a Joseph & Daniel 11/01/2017 Introduction to ROS 2D Turtle Simulation 3D Turtlebot Simulation Real Turtlebot Demo What is ROS ROS is an open-source, meta-operating system for your robot
ROS Tutorial Me133a Joseph & Daniel 11/01/2017 Introduction to ROS 2D Turtle Simulation 3D Turtlebot Simulation Real Turtlebot Demo What is ROS ROS is an open-source, meta-operating system for your robot
Multisensory Based Manipulation Architecture
 Marine Robot and Dexterous Manipulatin for Enabling Multipurpose Intevention Missions WP7 Multisensory Based Manipulation Architecture GIRONA 2012 Y2 Review Meeting Pedro J Sanz IRS Lab http://www.irs.uji.es/
Marine Robot and Dexterous Manipulatin for Enabling Multipurpose Intevention Missions WP7 Multisensory Based Manipulation Architecture GIRONA 2012 Y2 Review Meeting Pedro J Sanz IRS Lab http://www.irs.uji.es/
pbasiccontactmgr: Managing Platform Contacts
 pbasiccontactmgr: Managing Platform Contacts June 2018 Michael Benjamin, mikerb@mit.edu Department of Mechanical Engineering, CSAIL MIT, Cambridge MA 02139 1 Overview 1 2 Using pbasiccontactmgr 2 2.1 Contact
pbasiccontactmgr: Managing Platform Contacts June 2018 Michael Benjamin, mikerb@mit.edu Department of Mechanical Engineering, CSAIL MIT, Cambridge MA 02139 1 Overview 1 2 Using pbasiccontactmgr 2 2.1 Contact
MIT Unmanned Marine Vehicle Autonomy, Sensing and Communications Spring 2015
 MIT 2.680 Unmanned Marine Vehicle Autonomy, Sensing and Communications Spring 2015 Lectures: Labs: Lab Material: Stellar site: Class Website: Instructors: Office Hours: Contact Info: M-W 3-4pm, NE45-202
MIT 2.680 Unmanned Marine Vehicle Autonomy, Sensing and Communications Spring 2015 Lectures: Labs: Lab Material: Stellar site: Class Website: Instructors: Office Hours: Contact Info: M-W 3-4pm, NE45-202
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
Smart and Networking Underwater Robots in Cooperation Meshes
 Smart and Networking Underwater Robots in Cooperation Meshes SWARMs Newsletter #1 April 2016 Fostering offshore growth Many offshore industrial operations frequently involve divers in challenging and risky
Smart and Networking Underwater Robots in Cooperation Meshes SWARMs Newsletter #1 April 2016 Fostering offshore growth Many offshore industrial operations frequently involve divers in challenging and risky
im200 Payload Autonomy Interface for Heron USVs
 im200 Payload Autonomy Interface for Heron USVs Fall 2017 Alon Yaari, ayaari@mit.edu Michael Benjamin, mikerb@mit.edu Department of Mechanical Engineering, CSAIL MIT, Cambridge MA 02139 1 im200 Payload
im200 Payload Autonomy Interface for Heron USVs Fall 2017 Alon Yaari, ayaari@mit.edu Michael Benjamin, mikerb@mit.edu Department of Mechanical Engineering, CSAIL MIT, Cambridge MA 02139 1 im200 Payload
Classical Control Based Autopilot Design Using PC/104
 Classical Control Based Autopilot Design Using PC/104 Mohammed A. Elsadig, Alneelain University, Dr. Mohammed A. Hussien, Alneelain University. Abstract Many recent papers have been written in unmanned
Classical Control Based Autopilot Design Using PC/104 Mohammed A. Elsadig, Alneelain University, Dr. Mohammed A. Hussien, Alneelain University. Abstract Many recent papers have been written in unmanned
Team Kanaloa: research initiatives and the Vertically Integrated Project (VIP) development paradigm
 development paradigm") Additive Manufacturing Renewable Energy and Energy Storage Astronomical Instruments and Precision Engineering Team Kanaloa: research initiatives and the Vertically Integrated Project (VIP) development
Additive Manufacturing Renewable Energy and Energy Storage Astronomical Instruments and Precision Engineering Team Kanaloa: research initiatives and the Vertically Integrated Project (VIP) development
Design of a Remote-Cockpit for small Aerospace Vehicles
 Design of a Remote-Cockpit for small Aerospace Vehicles Muhammad Faisal, Atheel Redah, Sergio Montenegro Universität Würzburg Informatik VIII, Josef-Martin Weg 52, 97074 Würzburg, Germany Phone: +49 30
Design of a Remote-Cockpit for small Aerospace Vehicles Muhammad Faisal, Atheel Redah, Sergio Montenegro Universität Würzburg Informatik VIII, Josef-Martin Weg 52, 97074 Würzburg, Germany Phone: +49 30
ReVRSR: Remote Virtual Reality for Service Robots
 ReVRSR: Remote Virtual Reality for Service Robots Amel Hassan, Ahmed Ehab Gado, Faizan Muhammad March 17, 2018 Abstract This project aims to bring a service robot s perspective to a human user. We believe
ReVRSR: Remote Virtual Reality for Service Robots Amel Hassan, Ahmed Ehab Gado, Faizan Muhammad March 17, 2018 Abstract This project aims to bring a service robot s perspective to a human user. We believe
COS Lecture 1 Autonomous Robot Navigation
 COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
MORSE, the essential ingredient to bring your robot to real life
 MORSE, the essential ingredient to bring your robot to real life gechever@laas.fr Laboratoire d Analyse et d Architecture des Systèmes Toulouse, France April 15, 2011 Review of MORSE Project started in
MORSE, the essential ingredient to bring your robot to real life gechever@laas.fr Laboratoire d Analyse et d Architecture des Systèmes Toulouse, France April 15, 2011 Review of MORSE Project started in
Physics-based Simulation Environment for Adaptive and Collaborative Marine Sensing with MOOS-IvP
 Physics-based Simulation Environment for Adaptive and Collaborative Marine Sensing with MOOS-IvP Prof. Henrik Schmidt Laboratory for Autonomous Marine Sensing Systems Massachusetts Institute of technology
Physics-based Simulation Environment for Adaptive and Collaborative Marine Sensing with MOOS-IvP Prof. Henrik Schmidt Laboratory for Autonomous Marine Sensing Systems Massachusetts Institute of technology
Mini Turty II Robot Getting Started V1.0
 Mini Turty II Robot Getting Started V1.0 Rhoeby Dynamics Mini Turty II Robot Getting Started Getting Started with Mini Turty II Robot Thank you for your purchase, and welcome to Rhoeby Dynamics products!
Mini Turty II Robot Getting Started V1.0 Rhoeby Dynamics Mini Turty II Robot Getting Started Getting Started with Mini Turty II Robot Thank you for your purchase, and welcome to Rhoeby Dynamics products!
Introducing modern robotics with ROS and Arduino
 Introducing modern robotics with ROS and Arduino Igor Zubrycki, Grzegorz Granosik Lodz University of Technology tel +48 42 6312554 Email: igor.zubrycki@dokt.p.lodz.pl, granosik@p.lodz.pl Abstract This
Introducing modern robotics with ROS and Arduino Igor Zubrycki, Grzegorz Granosik Lodz University of Technology tel +48 42 6312554 Email: igor.zubrycki@dokt.p.lodz.pl, granosik@p.lodz.pl Abstract This
e-navigation Underway International February 2016 Kilyong Kim(GMT Co., Ltd.) Co-author : Seojeong Lee(Korea Maritime and Ocean University)
 Co-author : Seojeong Lee(Korea Maritime and Ocean University)") e-navigation Underway International 2016 2-4 February 2016 Kilyong Kim(GMT Co., Ltd.) Co-author : Seojeong Lee(Korea Maritime and Ocean University) Eureka R&D project From Jan 2015 to Dec 2017 15 partners
e-navigation Underway International 2016 2-4 February 2016 Kilyong Kim(GMT Co., Ltd.) Co-author : Seojeong Lee(Korea Maritime and Ocean University) Eureka R&D project From Jan 2015 to Dec 2017 15 partners
ARCHITECTURE AND MODEL OF DATA INTEGRATION BETWEEN MANAGEMENT SYSTEMS AND AGRICULTURAL MACHINES FOR PRECISION AGRICULTURE
 ARCHITECTURE AND MODEL OF DATA INTEGRATION BETWEEN MANAGEMENT SYSTEMS AND AGRICULTURAL MACHINES FOR PRECISION AGRICULTURE W. C. Lopes, R. R. D. Pereira, M. L. Tronco, A. J. V. Porto NepAS [Center for Teaching
ARCHITECTURE AND MODEL OF DATA INTEGRATION BETWEEN MANAGEMENT SYSTEMS AND AGRICULTURAL MACHINES FOR PRECISION AGRICULTURE W. C. Lopes, R. R. D. Pereira, M. L. Tronco, A. J. V. Porto NepAS [Center for Teaching
Construction of Mobile Robots
 Construction of Mobile Robots 716.091 Institute for Software Technology 1 Previous Years Conference Robot https://www.youtube.com/watch?v=wu7zyzja89i Breakfast Robot https://youtu.be/dtoqiklqcug 2 This
Construction of Mobile Robots 716.091 Institute for Software Technology 1 Previous Years Conference Robot https://www.youtube.com/watch?v=wu7zyzja89i Breakfast Robot https://youtu.be/dtoqiklqcug 2 This
Robotics Introduction Matteo Matteucci
 Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
Platform Independent Launch Vehicle Avionics
 Platform Independent Launch Vehicle Avionics Small Satellite Conference Logan, Utah August 5 th, 2014 Company Introduction Founded in 2011 The Co-Founders blend Academia and Commercial Experience ~20 Employees
Platform Independent Launch Vehicle Avionics Small Satellite Conference Logan, Utah August 5 th, 2014 Company Introduction Founded in 2011 The Co-Founders blend Academia and Commercial Experience ~20 Employees
Winter School on Intervention Autonomous Underwater Vehicles
 Winter School on Intervention Autonomous Underwater Vehicles University of Girona, Spain 6 to 10th November 2017 2 /14 WELCOME Dear all participants, welcome to the first STRONG MAR winter school. The
Winter School on Intervention Autonomous Underwater Vehicles University of Girona, Spain 6 to 10th November 2017 2 /14 WELCOME Dear all participants, welcome to the first STRONG MAR winter school. The
Robots in society: Event 2
 Robots in society: Event 2 Service Robots Professor Gurvinder Singh Virk Technical Director, InnotecUK Trustee, CLAWAR Association Ltd Innovative Technology and Science Ltd InnoTecUK set up in 2009 and
Robots in society: Event 2 Service Robots Professor Gurvinder Singh Virk Technical Director, InnotecUK Trustee, CLAWAR Association Ltd Innovative Technology and Science Ltd InnoTecUK set up in 2009 and
A Course on Marine Robotic Systems: Theory to Practice. Full Programme
 A Course on Marine Robotic Systems: Theory to Practice 27-31 January, 2015 National Institute of Oceanography, Dona Paula, Goa Opening address by the Director of NIO Full Programme 1. Introduction and
A Course on Marine Robotic Systems: Theory to Practice 27-31 January, 2015 National Institute of Oceanography, Dona Paula, Goa Opening address by the Director of NIO Full Programme 1. Introduction and
The Oil & Gas Industry Requirements for Marine Robots of the 21st century
 The Oil & Gas Industry Requirements for Marine Robots of the 21st century www.eninorge.no Laura Gallimberti 20.06.2014 1 Outline Introduction: fast technology growth Overview underwater vehicles development
The Oil & Gas Industry Requirements for Marine Robots of the 21st century www.eninorge.no Laura Gallimberti 20.06.2014 1 Outline Introduction: fast technology growth Overview underwater vehicles development
How to build an autonomous anything
 How to build an autonomous anything Jim Tung jim@mathworks.com 2015 The MathWorks, Inc. 1 2 3 4 5 6 7 Autonomous Technology 8 Autonomy Having the power for self-governance 9 Autonomous Technology Provides
How to build an autonomous anything Jim Tung jim@mathworks.com 2015 The MathWorks, Inc. 1 2 3 4 5 6 7 Autonomous Technology 8 Autonomy Having the power for self-governance 9 Autonomous Technology Provides
Creating High Quality Interactive Simulations Using MATLAB and USARSim
 Creating High Quality Interactive Simulations Using MATLAB and USARSim Allison Mathis, Kingsley Fregene, and Brian Satterfield Abstract MATLAB and Simulink, useful tools for modeling and simulation of
Creating High Quality Interactive Simulations Using MATLAB and USARSim Allison Mathis, Kingsley Fregene, and Brian Satterfield Abstract MATLAB and Simulink, useful tools for modeling and simulation of
INTELLIGENT UNMANNED GROUND VEHICLES Autonomous Navigation Research at Carnegie Mellon
 INTELLIGENT UNMANNED GROUND VEHICLES Autonomous Navigation Research at Carnegie Mellon THE KLUWER INTERNATIONAL SERIES IN ENGINEERING AND COMPUTER SCIENCE ROBOTICS: VISION, MANIPULATION AND SENSORS Consulting
INTELLIGENT UNMANNED GROUND VEHICLES Autonomous Navigation Research at Carnegie Mellon THE KLUWER INTERNATIONAL SERIES IN ENGINEERING AND COMPUTER SCIENCE ROBOTICS: VISION, MANIPULATION AND SENSORS Consulting
CAPACITIES FOR TECHNOLOGY TRANSFER
 CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
Visual Navigation for Flying Robots. Welcome
 Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Welcome Dr. Jürgen Sturm Advertisement: Machine Learning for Computer Vision 2 Dr. Rudolph Triebel Computer Vision Group Advertisement:
Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Welcome Dr. Jürgen Sturm Advertisement: Machine Learning for Computer Vision 2 Dr. Rudolph Triebel Computer Vision Group Advertisement:
Autonomous Mobile Robot Design. Dr. Kostas Alexis (CSE)
") Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
Robo$cs Introduc$on. ROS Workshop. Faculty of Informa$on Technology, Brno University of Technology Bozetechova 2, Brno
 Robo$cs Introduc$on ROS Workshop Faculty of Informa$on Technology, Brno University of Technology Bozetechova 2, 612 66 Brno name@fit.vutbr.cz What is a Robot? a programmable, mul.func.on manipulator USA
Robo$cs Introduc$on ROS Workshop Faculty of Informa$on Technology, Brno University of Technology Bozetechova 2, 612 66 Brno name@fit.vutbr.cz What is a Robot? a programmable, mul.func.on manipulator USA
Desktop real time flight simulator for control design
 Desktop real time flight simulator for control design By T Vijeesh, Technical Officer, FMCD, CSIR-NAL, Bangalore C Kamali, Scientist, FMCD, CSIR-NAL, Bangalore Prem Kumar B, Project Assistant,,FMCD, CSIR-NAL,
Desktop real time flight simulator for control design By T Vijeesh, Technical Officer, FMCD, CSIR-NAL, Bangalore C Kamali, Scientist, FMCD, CSIR-NAL, Bangalore Prem Kumar B, Project Assistant,,FMCD, CSIR-NAL,
Human-Robot Interaction for Remote Application
 Human-Robot Interaction for Remote Application MS. Hendriyawan Achmad Universitas Teknologi Yogyakarta, Jalan Ringroad Utara, Jombor, Sleman 55285, INDONESIA Gigih Priyandoko Faculty of Mechanical Engineering
Human-Robot Interaction for Remote Application MS. Hendriyawan Achmad Universitas Teknologi Yogyakarta, Jalan Ringroad Utara, Jombor, Sleman 55285, INDONESIA Gigih Priyandoko Faculty of Mechanical Engineering
Visual Navigation for Flying Robots. Welcome
 Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Welcome Dr. Jürgen Sturm Organization Tue 10:15-11:45 Lectures, discussions Lecturer: Jürgen Sturm Thu 14:15-15:45 Lab course,
Computer Vision Group Prof. Daniel Cremers Visual Navigation for Flying Robots Welcome Dr. Jürgen Sturm Organization Tue 10:15-11:45 Lectures, discussions Lecturer: Jürgen Sturm Thu 14:15-15:45 Lab course,
Vision Based Fuzzy Control Autonomous Landing with UAVs: From V-REP to Real Experiments
 Vision Based Fuzzy Control Autonomous Landing with UAVs: From V-REP to Real Experiments Miguel A. Olivares-Mendez and Somasundar Kannan and Holger Voos Abstract This paper is focused on the design of a
Vision Based Fuzzy Control Autonomous Landing with UAVs: From V-REP to Real Experiments Miguel A. Olivares-Mendez and Somasundar Kannan and Holger Voos Abstract This paper is focused on the design of a
Formation and Cooperation for SWARMed Intelligent Robots
 Formation and Cooperation for SWARMed Intelligent Robots Wei Cao 1 Yanqing Gao 2 Jason Robert Mace 3 (West Virginia University 1 University of Arizona 2 Energy Corp. of America 3 ) Abstract This article
Formation and Cooperation for SWARMed Intelligent Robots Wei Cao 1 Yanqing Gao 2 Jason Robert Mace 3 (West Virginia University 1 University of Arizona 2 Energy Corp. of America 3 ) Abstract This article
The LVCx Framework. The LVCx Framework An Advanced Framework for Live, Virtual and Constructive Experimentation
 An Advanced Framework for Live, Virtual and Constructive Experimentation An Advanced Framework for Live, Virtual and Constructive Experimentation The CSIR has a proud track record spanning more than ten
An Advanced Framework for Live, Virtual and Constructive Experimentation An Advanced Framework for Live, Virtual and Constructive Experimentation The CSIR has a proud track record spanning more than ten
Lab 7: Introduction to Webots and Sensor Modeling
 Lab 7: Introduction to Webots and Sensor Modeling This laboratory requires the following software: Webots simulator C development tools (gcc, make, etc.) The laboratory duration is approximately two hours.
Lab 7: Introduction to Webots and Sensor Modeling This laboratory requires the following software: Webots simulator C development tools (gcc, make, etc.) The laboratory duration is approximately two hours.
How to build an autonomous anything
 How to build an autonomous anything Loren Shure Application Engineering MathWorks 2015 The MathWorks, Inc. 1 2 3 4 5 6 7 Autonomous Technology 8 Autonomous Technology Having the power for self-governance
How to build an autonomous anything Loren Shure Application Engineering MathWorks 2015 The MathWorks, Inc. 1 2 3 4 5 6 7 Autonomous Technology 8 Autonomous Technology Having the power for self-governance
Report, IDE1229 MASTER THESIS. A Mixed-Reality Platform for Robotics and Intelligent Vehicles
 Report, IDE1229 MASTER THESIS A Mixed-Reality Platform for Robotics and Intelligent Vehicles School of Information Science, Computer and Electrical Engineering Halmstad University - Sweden in Cooperation
Report, IDE1229 MASTER THESIS A Mixed-Reality Platform for Robotics and Intelligent Vehicles School of Information Science, Computer and Electrical Engineering Halmstad University - Sweden in Cooperation
Requirements Specification Minesweeper
 Requirements Specification Minesweeper Version. Editor: Elin Näsholm Date: November 28, 207 Status Reviewed Elin Näsholm 2/9 207 Approved Martin Lindfors 2/9 207 Course name: Automatic Control - Project
Requirements Specification Minesweeper Version. Editor: Elin Näsholm Date: November 28, 207 Status Reviewed Elin Näsholm 2/9 207 Approved Martin Lindfors 2/9 207 Course name: Automatic Control - Project
Robotics Enabling Autonomy in Challenging Environments
 Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
Robotics Enabling Autonomy in Challenging Environments Ioannis Rekleitis Computer Science and Engineering, University of South Carolina CSCE 190 21 Oct. 2014 Ioannis Rekleitis 1 Why Robotics? Mars exploration
ATPE Simulator: Simulation Tool for Onboard GNC Development and Validation
 ATPE Simulator: Simulation Tool for Onboard GNC Development and Validation Uwe Brüge Uwe Soppa Presented by Eugénio Ferreira GNC & On-board S/W Engineering 3rd ESA Workshop on Astrodynamics Tools and Techniques
ATPE Simulator: Simulation Tool for Onboard GNC Development and Validation Uwe Brüge Uwe Soppa Presented by Eugénio Ferreira GNC & On-board S/W Engineering 3rd ESA Workshop on Astrodynamics Tools and Techniques
CS494/594: Software for Intelligent Robotics
 CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
Funzionalità per la navigazione di robot mobili. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Funzionalità per la navigazione di robot mobili Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Variability of the Robotic Domain UNIBG - Corso di Robotica - Prof. Brugali Tourist
Funzionalità per la navigazione di robot mobili Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Variability of the Robotic Domain UNIBG - Corso di Robotica - Prof. Brugali Tourist
GNC/AOCS DEVELOPMENT SYSTEM FOR RENDEZ-VOUS AND DOCKING MISSIONS AT SENER, AND ASSOCIATED TEST FACILITIES
 . GNC/AOCS DEVELOPMENT SYSTEM FOR RENDEZ-VOUS AND DOCKING MISSIONS AT SENER, AND ASSOCIATED TEST FACILITIES Gonzalo Saavedra, Antonio Ayuso, Juan Manuel del Cura, Jose Maria Fernandez, Salvador Llorente,
. GNC/AOCS DEVELOPMENT SYSTEM FOR RENDEZ-VOUS AND DOCKING MISSIONS AT SENER, AND ASSOCIATED TEST FACILITIES Gonzalo Saavedra, Antonio Ayuso, Juan Manuel del Cura, Jose Maria Fernandez, Salvador Llorente,
E 322 DESIGN 6 SMART PARKING SYSTEM. Section 1
 E 322 DESIGN 6 SMART PARKING SYSTEM Section 1 Summary of Assignments of Individual Group Members Joany Jores Project overview, GPS Limitations and Solutions Afiq Izzat Mohamad Fuzi SFPark, GPS System Mohd
E 322 DESIGN 6 SMART PARKING SYSTEM Section 1 Summary of Assignments of Individual Group Members Joany Jores Project overview, GPS Limitations and Solutions Afiq Izzat Mohamad Fuzi SFPark, GPS System Mohd
INESCTEC Marine Robotics Experience
 From Knowledge Generation To Science-based Innovation INESCTEC Marine Robotics Experience Aníbal Matos Robotics@ INESC TEC Universidade do Porto SEAS-ERA Workshop, Lisboa Sep 17-18, 2013 Research and Technological
From Knowledge Generation To Science-based Innovation INESCTEC Marine Robotics Experience Aníbal Matos Robotics@ INESC TEC Universidade do Porto SEAS-ERA Workshop, Lisboa Sep 17-18, 2013 Research and Technological
CubeSat Proximity Operations Demonstration (CPOD) Vehicle Avionics and Design
 Vehicle Avionics and Design") CubeSat Proximity Operations Demonstration (CPOD) Vehicle Avionics and Design August CubeSat Workshop 2015 Austin Williams VP, Space Vehicles CPOD: Big Capability in a Small Package Communications ADCS
CubeSat Proximity Operations Demonstration (CPOD) Vehicle Avionics and Design August CubeSat Workshop 2015 Austin Williams VP, Space Vehicles CPOD: Big Capability in a Small Package Communications ADCS
Robotic Technology for Port and Maritime Automation
 Industrial/Service Robots Field Robots Robotic Technology for Port and Maritime Automation Presenter: Assoc Prof Chen I-Ming Director, Robotics Research Center & Intelligent Systems Center School of Mechanical
Industrial/Service Robots Field Robots Robotic Technology for Port and Maritime Automation Presenter: Assoc Prof Chen I-Ming Director, Robotics Research Center & Intelligent Systems Center School of Mechanical
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo. Introduction: Applications, Problems, Architectures
 Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
Autonomous and Mobile Robotics Prof. Giuseppe Oriolo Introduction: Applications, Problems, Architectures organization class schedule 2017/2018: 7 Mar - 1 June 2018, Wed 8:00-12:00, Fri 8:00-10:00, B2 6
Modeling and Simulation Made Easy with Simulink Carlos Osorio Principal Application Engineer MathWorks Natick, MA
 Modeling and Simulation Made Easy with Simulink Carlos Osorio Principal Application Engineer MathWorks Natick, MA 2013 The MathWorks, Inc. 1 Questions covered in this presentation 1. Why do we do modeling
Modeling and Simulation Made Easy with Simulink Carlos Osorio Principal Application Engineer MathWorks Natick, MA 2013 The MathWorks, Inc. 1 Questions covered in this presentation 1. Why do we do modeling
Running the PR2. Chapter Getting set up Out of the box Batteries and power
 Chapter 5 Running the PR2 Running the PR2 requires a basic understanding of ROS (http://www.ros.org), the BSD-licensed Robot Operating System. A ROS system consists of multiple processes running on multiple
Chapter 5 Running the PR2 Running the PR2 requires a basic understanding of ROS (http://www.ros.org), the BSD-licensed Robot Operating System. A ROS system consists of multiple processes running on multiple
Swarm Robotics. Communication and Cooperation over the Internet. Will Ferenc, Hannah Kastein, Lauren Lieu, Ryan Wilson Mentor: Jérôme Gilles
 and Cooperation over the Internet Will Ferenc, Hannah Kastein, Lauren Lieu, Ryan Wilson Mentor: Jérôme Gilles UCLA Applied Mathematics REU 2011 Credit: c 2010 Bruce Avera Hunter, Courtesy of life.nbii.gov
and Cooperation over the Internet Will Ferenc, Hannah Kastein, Lauren Lieu, Ryan Wilson Mentor: Jérôme Gilles UCLA Applied Mathematics REU 2011 Credit: c 2010 Bruce Avera Hunter, Courtesy of life.nbii.gov
Autonomous Control for Unmanned
 Autonomous Control for Unmanned Surface Vehicles December 8, 2016 Carl Conti, CAPT, USN (Ret) Spatial Integrated Systems, Inc. SIS Corporate Profile Small Business founded in 1997, focusing on Research,
Autonomous Control for Unmanned Surface Vehicles December 8, 2016 Carl Conti, CAPT, USN (Ret) Spatial Integrated Systems, Inc. SIS Corporate Profile Small Business founded in 1997, focusing on Research,
Lab 8: Introduction to the e-puck Robot
 Lab 8: Introduction to the e-puck Robot This laboratory requires the following equipment: C development tools (gcc, make, etc.) C30 programming tools for the e-puck robot The development tree which is
Lab 8: Introduction to the e-puck Robot This laboratory requires the following equipment: C development tools (gcc, make, etc.) C30 programming tools for the e-puck robot The development tree which is
Autonomous Mobile Robots
 Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? To answer these questions the robot has to have a model of the environment (given
Autonomous Mobile Robots The three key questions in Mobile Robotics Where am I? Where am I going? How do I get there?? To answer these questions the robot has to have a model of the environment (given
An Evaluation of Potential Operating Systems for Autonomous Underwater Vehicles
 An Evaluation of Potential Operating Systems for Autonomous Underwater Vehicles C. Madden Maritime Platforms Division Defence Science and Technology Organisation ABSTRACT This document explores the Operating
An Evaluation of Potential Operating Systems for Autonomous Underwater Vehicles C. Madden Maritime Platforms Division Defence Science and Technology Organisation ABSTRACT This document explores the Operating
DEVELOPMENT OF A ROBOID COMPONENT FOR PLAYER/STAGE ROBOT SIMULATOR
 Proceedings of IC-NIDC2009 DEVELOPMENT OF A ROBOID COMPONENT FOR PLAYER/STAGE ROBOT SIMULATOR Jun Won Lim 1, Sanghoon Lee 2,Il Hong Suh 1, and Kyung Jin Kim 3 1 Dept. Of Electronics and Computer Engineering,
Proceedings of IC-NIDC2009 DEVELOPMENT OF A ROBOID COMPONENT FOR PLAYER/STAGE ROBOT SIMULATOR Jun Won Lim 1, Sanghoon Lee 2,Il Hong Suh 1, and Kyung Jin Kim 3 1 Dept. Of Electronics and Computer Engineering,
Team Breaking Bat Architecture Design Specification. Virtual Slugger
 Department of Computer Science and Engineering The University of Texas at Arlington Team Breaking Bat Architecture Design Specification Virtual Slugger Team Members: Sean Gibeault Brandon Auwaerter Ehidiamen
Department of Computer Science and Engineering The University of Texas at Arlington Team Breaking Bat Architecture Design Specification Virtual Slugger Team Members: Sean Gibeault Brandon Auwaerter Ehidiamen
vstasker 6 A COMPLETE MULTI-PURPOSE SOFTWARE TO SPEED UP YOUR SIMULATION PROJECT, FROM DESIGN TIME TO DEPLOYMENT REAL-TIME SIMULATION TOOLKIT FEATURES
 REAL-TIME SIMULATION TOOLKIT A COMPLETE MULTI-PURPOSE SOFTWARE TO SPEED UP YOUR SIMULATION PROJECT, FROM DESIGN TIME TO DEPLOYMENT Diagram based Draw your logic using sequential function charts and let
REAL-TIME SIMULATION TOOLKIT A COMPLETE MULTI-PURPOSE SOFTWARE TO SPEED UP YOUR SIMULATION PROJECT, FROM DESIGN TIME TO DEPLOYMENT Diagram based Draw your logic using sequential function charts and let
CMRE La Spezia, Italy
 Innovative Interoperable M&S within Extended Maritime Domain for Critical Infrastructure Protection and C-IED CMRE La Spezia, Italy Agostino G. Bruzzone 1,2, Alberto Tremori 1 1 NATO STO CMRE& 2 Genoa
Innovative Interoperable M&S within Extended Maritime Domain for Critical Infrastructure Protection and C-IED CMRE La Spezia, Italy Agostino G. Bruzzone 1,2, Alberto Tremori 1 1 NATO STO CMRE& 2 Genoa
RoboCup TDP Team ZSTT
 RoboCup 2018 - TDP Team ZSTT Jaesik Jeong 1, Jeehyun Yang 1, Yougsup Oh 2, Hyunah Kim 2, Amirali Setaieshi 3, Sourosh Sedeghnejad 3, and Jacky Baltes 1 1 Educational Robotics Centre, National Taiwan Noremal
RoboCup 2018 - TDP Team ZSTT Jaesik Jeong 1, Jeehyun Yang 1, Yougsup Oh 2, Hyunah Kim 2, Amirali Setaieshi 3, Sourosh Sedeghnejad 3, and Jacky Baltes 1 1 Educational Robotics Centre, National Taiwan Noremal
General Environment for Human Interaction with a Robot Hand-Arm System and Associate Elements
 General Environment for Human Interaction with a Robot Hand-Arm System and Associate Elements Jose Fortín and Raúl Suárez Abstract Software development in robotics is a complex task due to the existing
General Environment for Human Interaction with a Robot Hand-Arm System and Associate Elements Jose Fortín and Raúl Suárez Abstract Software development in robotics is a complex task due to the existing
MarineSIM : Robot Simulation for Marine Environments
 MarineSIM : Robot Simulation for Marine Environments P.G.C.Namal Senarathne, Wijerupage Sardha Wijesoma,KwangWeeLee, Bharath Kalyan, Moratuwage M.D.P, Nicholas M. Patrikalakis, Franz S. Hover School of
MarineSIM : Robot Simulation for Marine Environments P.G.C.Namal Senarathne, Wijerupage Sardha Wijesoma,KwangWeeLee, Bharath Kalyan, Moratuwage M.D.P, Nicholas M. Patrikalakis, Franz S. Hover School of
Realistic Robot Simulator Nicolas Ward '05 Advisor: Prof. Maxwell
 Realistic Robot Simulator Nicolas Ward '05 Advisor: Prof. Maxwell 2004.12.01 Abstract I propose to develop a comprehensive and physically realistic virtual world simulator for use with the Swarthmore Robotics
Realistic Robot Simulator Nicolas Ward '05 Advisor: Prof. Maxwell 2004.12.01 Abstract I propose to develop a comprehensive and physically realistic virtual world simulator for use with the Swarthmore Robotics
LOCALIZATION WITH GPS UNAVAILABLE
 LOCALIZATION WITH GPS UNAVAILABLE ARES SWIEE MEETING - ROME, SEPT. 26 2014 TOR VERGATA UNIVERSITY Summary Introduction Technology State of art Application Scenarios vs. Technology Advanced Research in
LOCALIZATION WITH GPS UNAVAILABLE ARES SWIEE MEETING - ROME, SEPT. 26 2014 TOR VERGATA UNIVERSITY Summary Introduction Technology State of art Application Scenarios vs. Technology Advanced Research in
OBSTACLE DETECTION AND COLLISION AVOIDANCE USING ULTRASONIC DISTANCE SENSORS FOR AN AUTONOMOUS QUADROCOPTER
 OBSTACLE DETECTION AND COLLISION AVOIDANCE USING ULTRASONIC DISTANCE SENSORS FOR AN AUTONOMOUS QUADROCOPTER Nils Gageik, Thilo Müller, Sergio Montenegro University of Würzburg, Aerospace Information Technology
OBSTACLE DETECTION AND COLLISION AVOIDANCE USING ULTRASONIC DISTANCE SENSORS FOR AN AUTONOMOUS QUADROCOPTER Nils Gageik, Thilo Müller, Sergio Montenegro University of Würzburg, Aerospace Information Technology
3D Virtual Training Systems Architecture
 3D Virtual Training Systems Architecture January 21-24, 2018 ISO/IEC JTC 1/SC 24/WG 9 & Web3D Meetings Seoul, Korea Myeong Won Lee (U. of Suwon) Virtual Training Systems Definition Training systems using
3D Virtual Training Systems Architecture January 21-24, 2018 ISO/IEC JTC 1/SC 24/WG 9 & Web3D Meetings Seoul, Korea Myeong Won Lee (U. of Suwon) Virtual Training Systems Definition Training systems using
David Howarth. Business Development Manager Americas
 David Howarth Business Development Manager Americas David Howarth IPG Automotive USA, Inc. Business Development Manager Americas david.howarth@ipg-automotive.com ni.com Testing Automated Driving Functions
David Howarth Business Development Manager Americas David Howarth IPG Automotive USA, Inc. Business Development Manager Americas david.howarth@ipg-automotive.com ni.com Testing Automated Driving Functions
Department of Computer Science and Engineering The Chinese University of Hong Kong. Year Final Year Project
 Digital Interactive Game Interface Table Apps for ipad Supervised by: Professor Michael R. Lyu Student: Ng Ka Hung (1009615714) Chan Hing Faat (1009618344) Year 2011 2012 Final Year Project Department
Digital Interactive Game Interface Table Apps for ipad Supervised by: Professor Michael R. Lyu Student: Ng Ka Hung (1009615714) Chan Hing Faat (1009618344) Year 2011 2012 Final Year Project Department
CS 378: Autonomous Intelligent Robotics. Instructor: Jivko Sinapov
 CS 378: Autonomous Intelligent Robotics Instructor: Jivko Sinapov http://www.cs.utexas.edu/~jsinapov/teaching/cs378/ Announcements FRI Summer Research Fellowships: https://cns.utexas.edu/fri/beyond-the-freshman-lab/fellowships
CS 378: Autonomous Intelligent Robotics Instructor: Jivko Sinapov http://www.cs.utexas.edu/~jsinapov/teaching/cs378/ Announcements FRI Summer Research Fellowships: https://cns.utexas.edu/fri/beyond-the-freshman-lab/fellowships
Smart and Networking Underwater Robots in Cooperation Meshes
 Smart and Networking Underwater Robots in Cooperation Meshes SWARMs Newsletter #2 January 2017 SWARMs Early Trials The first stage of field trials and demonstrations planned in the SWARMs project was held
Smart and Networking Underwater Robots in Cooperation Meshes SWARMs Newsletter #2 January 2017 SWARMs Early Trials The first stage of field trials and demonstrations planned in the SWARMs project was held
Say hello to BAXTER! A.P.R.I.L. Project - Residential Workshop Plymouth MSc. CNCR Gabriella Pizzuto & MSc. Eng. Ricardo de Azambuja
 Say hello to BAXTER! A.P.R.I.L. Project - Residential Workshop Plymouth 2016 MSc. CNCR Gabriella Pizzuto & MSc. Eng. Ricardo de Azambuja By the end of this workshop, you should be able to: Understand what
Say hello to BAXTER! A.P.R.I.L. Project - Residential Workshop Plymouth 2016 MSc. CNCR Gabriella Pizzuto & MSc. Eng. Ricardo de Azambuja By the end of this workshop, you should be able to: Understand what
E 322 DESIGN 6 - SMART PARKING SYSTEM
 E 322 DESIGN 6 - SMART PARKING SYSTEM HW6 Functionality of the overall system: The main function of the system is to assist the user to find empty spot in a parking area with the help of GPS technology.
E 322 DESIGN 6 - SMART PARKING SYSTEM HW6 Functionality of the overall system: The main function of the system is to assist the user to find empty spot in a parking area with the help of GPS technology.
Unmanned Maritime Vehicle (UMV) Test & Evaluation Conference
 Test & Evaluation Conference") Unmanned Maritime Vehicle (UMV) Test & Evaluation Conference Future Technology Development and Assessment for UUV Acquisition James Griffin NUWCDIVNPT Autonomous Systems and Technology Department T&E is
Unmanned Maritime Vehicle (UMV) Test & Evaluation Conference Future Technology Development and Assessment for UUV Acquisition James Griffin NUWCDIVNPT Autonomous Systems and Technology Department T&E is
Semi-Autonomous Parking for Enhanced Safety and Efficiency
 Technical Report 105 Semi-Autonomous Parking for Enhanced Safety and Efficiency Sriram Vishwanath WNCG June 2017 Data-Supported Transportation Operations & Planning Center (D-STOP) A Tier 1 USDOT University
Technical Report 105 Semi-Autonomous Parking for Enhanced Safety and Efficiency Sriram Vishwanath WNCG June 2017 Data-Supported Transportation Operations & Planning Center (D-STOP) A Tier 1 USDOT University
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
Human Robot Interaction
 Human Robot Interaction Taxonomy 1 Source Material About This Class Classifying Human-Robot Interaction an Updated Taxonomy Topics What is this taxonomy thing? Some ways of looking at Human-Robot relationships.
Human Robot Interaction Taxonomy 1 Source Material About This Class Classifying Human-Robot Interaction an Updated Taxonomy Topics What is this taxonomy thing? Some ways of looking at Human-Robot relationships.
Intelligent Robotics Project and simulator
 Intelligent Robotics Project and simulator Thibaut Cuvelier 16 February 2017 Today s plan Project details Introduction to the simulator MATLAB for the simulator http://www.montefiore.ulg.ac.be/~tcuvelier/ir
Intelligent Robotics Project and simulator Thibaut Cuvelier 16 February 2017 Today s plan Project details Introduction to the simulator MATLAB for the simulator http://www.montefiore.ulg.ac.be/~tcuvelier/ir
CS 599: Distributed Intelligence in Robotics
 CS 599: Distributed Intelligence in Robotics Winter 2016 www.cpp.edu/~ftang/courses/cs599-di/ Dr. Daisy Tang All lecture notes are adapted from Dr. Lynne Parker s lecture notes on Distributed Intelligence
CS 599: Distributed Intelligence in Robotics Winter 2016 www.cpp.edu/~ftang/courses/cs599-di/ Dr. Daisy Tang All lecture notes are adapted from Dr. Lynne Parker s lecture notes on Distributed Intelligence
A Modular Architecture for an Interactive Real-Time Simulation and Training Environment for Satellite On-Orbit Servicing
 A Modular Architecture for an Interactive Real-Time Simulation and Training Environment for Satellite On-Orbit Servicing Robin Wolff German Aerospace Center (DLR), Germany Slide 1 Outline! Motivation!
A Modular Architecture for an Interactive Real-Time Simulation and Training Environment for Satellite On-Orbit Servicing Robin Wolff German Aerospace Center (DLR), Germany Slide 1 Outline! Motivation!
GPS System Design and Control Modeling. Chua Shyan Jin, Ronald. Assoc. Prof Gerard Leng. Aeronautical Engineering Group, NUS
 GPS System Design and Control Modeling Chua Shyan Jin, Ronald Assoc. Prof Gerard Leng Aeronautical Engineering Group, NUS Abstract A GPS system for the autonomous navigation and surveillance of an airship
GPS System Design and Control Modeling Chua Shyan Jin, Ronald Assoc. Prof Gerard Leng Aeronautical Engineering Group, NUS Abstract A GPS system for the autonomous navigation and surveillance of an airship
Using Robot Operating System (ROS) and Single Board Computer to Control Bioloid Robot Motion
 and Single Board Computer to Control Bioloid Robot Motion") Using Robot Operating System (ROS) and Single Board Computer to Control Bioloid Robot Motion Ganesh Kumar Kalyani 1, Zhijun Yang 2, Vaibhav Gandhi 3, and Tao Geng 4 Design Engineering and Mathematics department,
Using Robot Operating System (ROS) and Single Board Computer to Control Bioloid Robot Motion Ganesh Kumar Kalyani 1, Zhijun Yang 2, Vaibhav Gandhi 3, and Tao Geng 4 Design Engineering and Mathematics department,
Modeling Software Systems in Experimental Robotics for Improved Reproducibility
 Modeling Software Systems in Experimental Robotics for Improved Reproducibility A Case Study with the icub Humanoid Robot HUMANOIDS November 18-20th 2014. Madrid. Spain Florian Lier, Sven Wachsmuth, Sebastian
Modeling Software Systems in Experimental Robotics for Improved Reproducibility A Case Study with the icub Humanoid Robot HUMANOIDS November 18-20th 2014. Madrid. Spain Florian Lier, Sven Wachsmuth, Sebastian
Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation
 Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation Hiroshi Ishiguro Department of Information Science, Kyoto University Sakyo-ku, Kyoto 606-01, Japan E-mail: ishiguro@kuis.kyoto-u.ac.jp
Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation Hiroshi Ishiguro Department of Information Science, Kyoto University Sakyo-ku, Kyoto 606-01, Japan E-mail: ishiguro@kuis.kyoto-u.ac.jp
Virtual Robots Module: An effective visualization tool for Robotics Toolbox
 Virtual Robots Module: An effective visualization tool for Robotics R. Sadanand Indian Institute of Technology Delhi New Delhi ratansadan@gmail.com R. G. Chittawadigi Amrita School of Bengaluru rg_chittawadigi@blr.am
Virtual Robots Module: An effective visualization tool for Robotics R. Sadanand Indian Institute of Technology Delhi New Delhi ratansadan@gmail.com R. G. Chittawadigi Amrita School of Bengaluru rg_chittawadigi@blr.am
Prospective Teleautonomy For EOD Operations
 Perception and task guidance Perceived world model & intent Prospective Teleautonomy For EOD Operations Prof. Seth Teller Electrical Engineering and Computer Science Department Computer Science and Artificial
Perception and task guidance Perceived world model & intent Prospective Teleautonomy For EOD Operations Prof. Seth Teller Electrical Engineering and Computer Science Department Computer Science and Artificial
UAV CRAFT CRAFT CUSTOMIZABLE SIMULATOR
 CRAFT UAV CRAFT CUSTOMIZABLE SIMULATOR Customizable, modular UAV simulator designed to adapt, evolve, and deliver. The UAV CRAFT customizable Unmanned Aircraft Vehicle (UAV) simulator s design is based
CRAFT UAV CRAFT CUSTOMIZABLE SIMULATOR Customizable, modular UAV simulator designed to adapt, evolve, and deliver. The UAV CRAFT customizable Unmanned Aircraft Vehicle (UAV) simulator s design is based
AIRCRAFT CONTROL AND SIMULATION
 AIRCRAFT CONTROL AND SIMULATION AIRCRAFT CONTROL AND SIMULATION Third Edition Dynamics, Controls Design, and Autonomous Systems BRIAN L. STEVENS FRANK L. LEWIS ERIC N. JOHNSON Cover image: Space Shuttle
AIRCRAFT CONTROL AND SIMULATION AIRCRAFT CONTROL AND SIMULATION Third Edition Dynamics, Controls Design, and Autonomous Systems BRIAN L. STEVENS FRANK L. LEWIS ERIC N. JOHNSON Cover image: Space Shuttle
An Experimentation Framework to Support UMV Design and Development
 An Experimentation Framework to Support UMV Design and Development Dr Roger Neill, Dr Francis Valentinis* and Dr John Wharington Maritime Platforms Division, DSTO *Swinburne University of Technology June
An Experimentation Framework to Support UMV Design and Development Dr Roger Neill, Dr Francis Valentinis* and Dr John Wharington Maritime Platforms Division, DSTO *Swinburne University of Technology June
Hardware in the Loop Simulation for Unmanned Aerial Vehicles
 NATIONAL 1 AEROSPACE LABORATORIES BANGALORE-560 017 INDIA CSIR-NAL Hardware in the Loop Simulation for Unmanned Aerial Vehicles Shikha Jain Kamali C Scientist, Flight Mechanics and Control Division National
NATIONAL 1 AEROSPACE LABORATORIES BANGALORE-560 017 INDIA CSIR-NAL Hardware in the Loop Simulation for Unmanned Aerial Vehicles Shikha Jain Kamali C Scientist, Flight Mechanics and Control Division National
DESIGN AND CAPABILITIES OF AN ENHANCED NAVAL MINE WARFARE SIMULATION FRAMEWORK. Timothy E. Floore George H. Gilman
 Proceedings of the 2011 Winter Simulation Conference S. Jain, R.R. Creasey, J. Himmelspach, K.P. White, and M. Fu, eds. DESIGN AND CAPABILITIES OF AN ENHANCED NAVAL MINE WARFARE SIMULATION FRAMEWORK Timothy
Proceedings of the 2011 Winter Simulation Conference S. Jain, R.R. Creasey, J. Himmelspach, K.P. White, and M. Fu, eds. DESIGN AND CAPABILITIES OF AN ENHANCED NAVAL MINE WARFARE SIMULATION FRAMEWORK Timothy
Dynamic Optimization Challenges in Autonomous Vehicle Systems
 Dynamic Optimization Challenges in Autonomous Vehicle Systems Fernando Lobo Pereira, João Borges de Sousa Faculdade de Engenharia da Universidade do Porto (FEUP) Presented by Jorge Estrela da Silva (Phd
Dynamic Optimization Challenges in Autonomous Vehicle Systems Fernando Lobo Pereira, João Borges de Sousa Faculdade de Engenharia da Universidade do Porto (FEUP) Presented by Jorge Estrela da Silva (Phd
League <BART LAB AssistBot (THAILAND)>
>") RoboCup@Home League 2013 Jackrit Suthakorn, Ph.D.*, Woratit Onprasert, Sakol Nakdhamabhorn, Rachot Phuengsuk, Yuttana Itsarachaiyot, Choladawan Moonjaita, Syed Saqib Hussain
RoboCup@Home League 2013 Jackrit Suthakorn, Ph.D.*, Woratit Onprasert, Sakol Nakdhamabhorn, Rachot Phuengsuk, Yuttana Itsarachaiyot, Choladawan Moonjaita, Syed Saqib Hussain
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
Small Unmanned Aerial Vehicle Simulation Research
 International Conference on Education, Management and Computer Science (ICEMC 2016) Small Unmanned Aerial Vehicle Simulation Research Shaojia Ju1, a and Min Ji1, b 1 Xijing University, Shaanxi Xi'an, 710123,
International Conference on Education, Management and Computer Science (ICEMC 2016) Small Unmanned Aerial Vehicle Simulation Research Shaojia Ju1, a and Min Ji1, b 1 Xijing University, Shaanxi Xi'an, 710123,
Case Analysis for USV Integrated Mission Planning System
 Journal of Computer and Communications, 2017, 5, 83-91 http://www.scirp.org/journal/jcc ISSN Online: 2327-5227 ISSN Print: 2327-5219 Case Analysis for USV Integrated Mission Planning System Jinyeong Heo
Journal of Computer and Communications, 2017, 5, 83-91 http://www.scirp.org/journal/jcc ISSN Online: 2327-5227 ISSN Print: 2327-5219 Case Analysis for USV Integrated Mission Planning System Jinyeong Heo