Benchmarking Intelligent Service Robots through Scientific Competitions: the approach. Luca Iocchi. Sapienza University of Rome, Italy
|
|
|
- Virgil Ford
- 5 years ago
- Views:
Transcription

1 Benchmarking Intelligent Service Robots through Scientific Competitions: the approach Luca Iocchi Sapienza University of Rome, Italy



2 Motivation Benchmarking Domestic Service Robots Complex Integrated Systems Human-Robot Interaction Large variety of tasks Evaluating integrated AI

3 About Starts in international competitions Many regional competitions Largest competition for domestic and service robots




4 Large variety of tasks
5 Benchmarking Domestic Service Robots Functional benchmarking Usually based on data set collection and off-line processing Difficulties in benchmarking DSR Human involved Real environments Integration of several capabilities coming from different research fields Large variety of tasks
6 Robotic scientific competitions DARPA Challenges RoboCup AAAI / ICRA / IROS robot competitions RoboCup Junior, Eurobot RoCKIn Advantages of Competitions Set up of common test-beds Attractive for many teams (research groups) Collaboration and knowledge sharing Evolution over time

 Danger of developing towards local")
7 Observations from other Robot Competitions Little HRI involved Limited application orientation No real world environment Very specific rules and regulations for robots and environment Often requires many resources (special environment, many robots) Danger of developing towards local optima
8 Fixed task + improving performance over time Local optimum (overfitting) Performance Local Optima in Benchmarking Given a fixed task Set of changing tasks + maintaining performance over time Global optimum Performance Time Tasks
9 (Difficulties in) Benchmarking DSR + (Advantages of) Benchmarking through competitions = RoboCup@Home RoboCup@Home competition allows for testing DSRs in many integrated tasks (not single functionalities) in real or realistic environments with the interaction of external users (not developers of the system under test).
10 approach Integrated system benchmarking of DSR: Realistic/real environments Definition of many tests related to desired functionalities and evaluated by external users Changing tests over the years to keep performance "constantly good" Statistical evaluation for measuring league progresses Can this approach be applied also to evaluate the development of a single "medium-term" project?







11 Scenario and Concepts Autonomous robots Human-Robot Interaction Non-standardised realistic domestic environment and real public areas Many tests related to desired functionalities Changing tests over the years to keep performance "constantly good" Statistical evaluation for measuring league progresses


12 Current focus of Functional abilities: Navigation Mapping Person recognition Person tracking Object recognition Object manipulation Speech recognition Gesture recognition Cognition

13 Current focus of System properties: Ease of use Fast calibration and setup Natural and multi-modal interaction Attractiveness and ergonomics of the robot Adaptivity and general intelligence Robustness General applicability
 Only natural interaction allowed Very short setup time (usually 1 minute) Partial score system for")
14 Implementation of General rules 2 stages with different focus Stage 1 for basic tasks Stage 2 for more complex, integrated tasks High level of uncertainty in the environment (no standardization) Only natural interaction allowed Very short setup time (usually 1 minute) Partial score system for tests


15 Stage 1 Robot Inspection & Poster: Autonomous registration to the competition, TC inspection, team poster Follow me: Lead the robot quickly on a path through an external scenario Cocktail Party: Deliver drinks to people in the apartment Clean up: Clean up a room in the apartment Emergency Situation: React to an unknown emergency situation Technical Challenge: Furniture-type Object perception Open Challenge: Present and demonstrate most important (scientific) achievements


 Finals: Open demonstration with")
16 Stage 2 Enduring General Purpose Service Robot: Solve multiple tasks not known beforehand upon request Restaurant: Mapping and serving drinks and food in a real unknown restaurant Demo Challenge: Demonstration of health care abilities (e.g., elder, children) Finals: Open demonstration with external jury evaluation + Exec evaluation
17 Implementation of Navigation Follow Me 49 % Mapping Person Recogn. Person Tracking 6% Object Recogn. Object Manipul. Speech/ Gesture Recogn. 39 % Clean Up Cocktail Party Emergency Situation Defined by the Technical Committee General Purpose Service Robot Restaurant Open Challenge Demo Challenge Defined by the teams Final 6% Cognition

 2011: pre-defined interferences (people passing between walker")
 future: public environment with crowd and")
18 Test evolution: 'follow me' example 2007: proof of concept, special markers on the walker allowed 2008: walker known, but no special markers 2009: walker unknown 2010: outside the arena (in the RoboCup venue) 2011: pre-defined interferences (people passing between walker and robot) : crowded and complex environment (changing floor through an elevator) future: public environment with crowd and unpredictable interferences
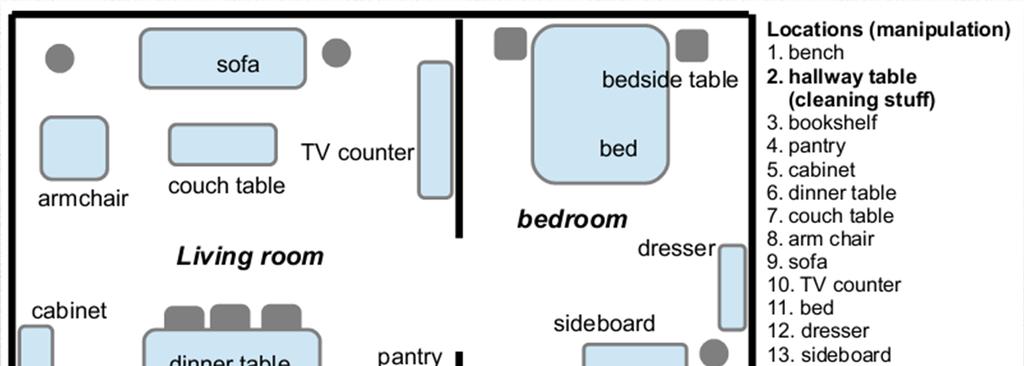
19 Apartment, People and Objects

20 Person names
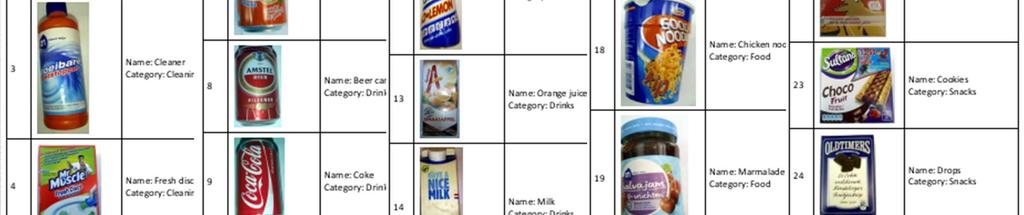
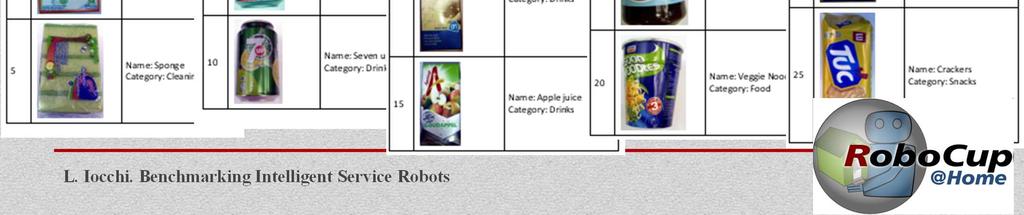
21 Objects

22 Object categories and default locations
23 Benchmarking Robot Cognition: General Purpose Service Robot The test is about how much the robot can understand and reason about the environment and its task No predefined task Task goals are randomly generated at runtime Task goals can include multiple objects/locations, underspecified objects/locations and wrong information GPSR incorporates the abilities tested in all previous tests.


24 Benchmarking Robot Cognition: General Purpose Service Robot Task goal is not predefined! Given a set of known objects, known locations and known persons, execute a randomly generated task from a set of templates.
25 Evaluation of the League Year by year statistical analysis to: Measure overall performance Drive developments Plan for rule changes


26 Score system Each test includes a set of the functional abilities Distribution of functional abilities over tests evolves over time allowing for proper analysing and planning.
27 Score system Example from Follow me 2012 test Navigation Object Person Person Recognition Recognition Tracking Object Speech Gesture Mapping Cognition Manipulation recognition recognition Distribution over tests evolves over of functional abilities 0.5 time allowing for proper analysing and planning. CP1 CP CP Complete


28 Evaluation Best/average score of the finalist teams.
. Good: we are not going towards a local optimum!")
29 Evaluation Performance metrics of the league over the years Performance do not always increase because of changes in the rules (major changes in 2008, 2010, 2012). Good: we are not going towards a local optimum!!!
30 Your 3-years project on intelligent robots Navigation Mapping 2013 Person Recogn. Person Tracking Object Recogn. Object Manipul. Speech/ Gesture Recogn. Cognition Test 1 Navigation Test 2 Mapping 2014 Person Recogn. Person Tracking Object Recogn. Object Manipul. Test 3 Speech/ Gesture Recogn. Cognition Test 1 Navigation Test 2 Mapping 2015 Person Recogn. Person Tracking Object Recogn. Object Manipul. Test 3 Test 1 Test 2 Test 3 "The main outcome of my project is general applicability" Speech/ Gesture Recogn. Cognition
 @Home Wiki (> 50")
 www.")
31 Community Resources Web site (information and Wiki (> 50 teams active worldwide) HW/SW/Papers Mailing lists (active rule discussion)
32 Scientific Achievements Speech understanding in noisy environments Speaker localization for following human guides Detecting and tracking human operators using laser and RBGD cameras Detecting, learning and recognizing objects Complex two-hands object manipulation Demonstrated within an integrated system

33 Future directions of More and more tests in the real world Improved cognitive and social skills - language skills - social behaviors Improved safety and security Human-robot cooperation Inter-team robot-robot cooperation Keep improving the adaptive benchmarking
34 Conclusions Benchmarking methodology based on the definition of several variable tests can drive the development of effective intelligent robots Statistical analysis can drive fast achievements of the league. Research groups can use to develop, test, evaluate and disseminate DSR solutions.
35 Thank you for your attention Questions?
Benchmarking Intelligent Service Robots through Scientific Competitions. Luca Iocchi. Sapienza University of Rome, Italy
 RoboCup@Home Benchmarking Intelligent Service Robots through Scientific Competitions Luca Iocchi Sapienza University of Rome, Italy Motivation Development of Domestic Service Robots Complex Integrated
RoboCup@Home Benchmarking Intelligent Service Robots through Scientific Competitions Luca Iocchi Sapienza University of Rome, Italy Motivation Development of Domestic Service Robots Complex Integrated
On past, present and future of a scientific competition for service robots
 On RoboCup@Home past, present and future of a scientific competition for service robots Dirk Holz 1, Javier Ruiz del Solar 2, Komei Sugiura 3, and Sven Wachsmuth 4 1 Autonomous Intelligent Systems Group,
On RoboCup@Home past, present and future of a scientific competition for service robots Dirk Holz 1, Javier Ruiz del Solar 2, Komei Sugiura 3, and Sven Wachsmuth 4 1 Autonomous Intelligent Systems Group,
Robotic Applications Industrial/logistics/medical robots
 Artificial Intelligence & Human-Robot Interaction Luca Iocchi Dept. of Computer Control and Management Eng. Sapienza University of Rome, Italy Robotic Applications Industrial/logistics/medical robots Known
Artificial Intelligence & Human-Robot Interaction Luca Iocchi Dept. of Computer Control and Management Eng. Sapienza University of Rome, Italy Robotic Applications Industrial/logistics/medical robots Known
Scientific Competition and Benchmarking for Domestic Service Robots
 RoboCup@Home Scientific Competition and Benchmarking for Domestic Service Robots Thomas Wisspeintner 1, Tijn van der Zant 2, Luca Iocchi 3 & Stefan Schiffer 4 1 Department of Mathematics and Computer Science,
RoboCup@Home Scientific Competition and Benchmarking for Domestic Service Robots Thomas Wisspeintner 1, Tijn van der Zant 2, Luca Iocchi 3 & Stefan Schiffer 4 1 Department of Mathematics and Computer Science,
Forms & Score Sheets
 RoboCup@Home Forms & s Version: 2011 Revision: 286:288 Last Build Date: June 13, 2012 Time: 896 Last Changed Date: 2012-06-04 14:41:02 +0200 (Mon, 04 Jun 2012) Registration Form Team leader name: Weight
RoboCup@Home Forms & s Version: 2011 Revision: 286:288 Last Build Date: June 13, 2012 Time: 896 Last Changed Date: 2012-06-04 14:41:02 +0200 (Mon, 04 Jun 2012) Registration Form Team leader name: Weight
Results in Benchmarking Domestic Service Robots
 RoboCup@Home: Results in Benchmarking Domestic Service Robots Thomas Wisspeintner 1, Tijn van der Zan 2, Luca Iocchi 3, and Stefan Schiffer 4 1 Department of Mathematics and Computer Science Freie Universität
RoboCup@Home: Results in Benchmarking Domestic Service Robots Thomas Wisspeintner 1, Tijn van der Zan 2, Luca Iocchi 3, and Stefan Schiffer 4 1 Department of Mathematics and Computer Science Freie Universität
Rules & Regulations. Version: 2009 Revision: 127 Last Build Date: January 21, 2009 Time: 598
 1 RoboCup@Home Rules & Regulations Version: 2009 Revision: 127 Last Build Date: January 21, 2009 Time: 598 2 Acknowledgments We would like to thank all the people who contributed to the RoboCup@Home league
1 RoboCup@Home Rules & Regulations Version: 2009 Revision: 127 Last Build Date: January 21, 2009 Time: 598 2 Acknowledgments We would like to thank all the people who contributed to the RoboCup@Home league
1 Abstract and Motivation
 1 Abstract and Motivation Robust robotic perception, manipulation, and interaction in domestic scenarios continues to present a hard problem: domestic environments tend to be unstructured, are constantly
1 Abstract and Motivation Robust robotic perception, manipulation, and interaction in domestic scenarios continues to present a hard problem: domestic environments tend to be unstructured, are constantly
Forms & Score Sheets
 RoboCup@Home Forms & s Version: 2011 Revision: 164M Last Build Date: June 29, 2011 Time: 497 Last Changed Date: 2011-05-26 18:19:35 +0200 (Thu, 26 May 2011) Registration Form Team leader name: Weight &
RoboCup@Home Forms & s Version: 2011 Revision: 164M Last Build Date: June 29, 2011 Time: 497 Last Changed Date: 2011-05-26 18:19:35 +0200 (Thu, 26 May 2011) Registration Form Team leader name: Weight &
Artificial Intelligence & Robotics from RoboCup to Everyday Applications
 Artificial Intelligence & Robotics from RoboCup to Everyday Applications What is a robot? Luca Iocchi Department of Computer, Control, and Management Engineering Sapienza University of Rome, Italy www.dis.uniroma1.it/~iocchi
Artificial Intelligence & Robotics from RoboCup to Everyday Applications What is a robot? Luca Iocchi Department of Computer, Control, and Management Engineering Sapienza University of Rome, Italy www.dis.uniroma1.it/~iocchi
Sven Wachsmuth Bielefeld University
 & CITEC Central Lab Facilities Performance Assessment and System Design in Human Robot Interaction Sven Wachsmuth Bielefeld University May, 2011 & CITEC Central Lab Facilities What are the Flops of cognitive
& CITEC Central Lab Facilities Performance Assessment and System Design in Human Robot Interaction Sven Wachsmuth Bielefeld University May, 2011 & CITEC Central Lab Facilities What are the Flops of cognitive
Citation for published version (APA): Visser, A. (2017). A New Challenge. Benelux AI Newsletter, 31(1), 2-6.
: Visser, A. (2017). A New Challenge. Benelux AI Newsletter, 31(1), 2-6.") UvA-DARE (Digital Academic Repository) A New RoboCup@Home Challenge Visser, A. Published in: Benelux AI Newsletter Link to publication Citation for published version (APA): Visser, A. (2017). A New RoboCup@Home
UvA-DARE (Digital Academic Repository) A New RoboCup@Home Challenge Visser, A. Published in: Benelux AI Newsletter Link to publication Citation for published version (APA): Visser, A. (2017). A New RoboCup@Home
UvA Rescue Team Description Paper Infrastructure competition Rescue Simulation League RoboCup Jo~ao Pessoa - Brazil
 UvA Rescue Team Description Paper Infrastructure competition Rescue Simulation League RoboCup 2014 - Jo~ao Pessoa - Brazil Arnoud Visser Universiteit van Amsterdam, Science Park 904, 1098 XH Amsterdam,
UvA Rescue Team Description Paper Infrastructure competition Rescue Simulation League RoboCup 2014 - Jo~ao Pessoa - Brazil Arnoud Visser Universiteit van Amsterdam, Science Park 904, 1098 XH Amsterdam,
SPQR RoboCup 2016 Standard Platform League Qualification Report
 SPQR RoboCup 2016 Standard Platform League Qualification Report V. Suriani, F. Riccio, L. Iocchi, D. Nardi Dipartimento di Ingegneria Informatica, Automatica e Gestionale Antonio Ruberti Sapienza Università
SPQR RoboCup 2016 Standard Platform League Qualification Report V. Suriani, F. Riccio, L. Iocchi, D. Nardi Dipartimento di Ingegneria Informatica, Automatica e Gestionale Antonio Ruberti Sapienza Università
CORC 3303 Exploring Robotics. Why Teams?
 Exploring Robotics Lecture F Robot Teams Topics: 1) Teamwork and Its Challenges 2) Coordination, Communication and Control 3) RoboCup Why Teams? It takes two (or more) Such as cooperative transportation:
Exploring Robotics Lecture F Robot Teams Topics: 1) Teamwork and Its Challenges 2) Coordination, Communication and Control 3) RoboCup Why Teams? It takes two (or more) Such as cooperative transportation:
Performance evaluation and benchmarking in EU-funded activities. ICRA May 2011
 Performance evaluation and benchmarking in EU-funded activities ICRA 2011 13 May 2011 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media European
Performance evaluation and benchmarking in EU-funded activities ICRA 2011 13 May 2011 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media European
Global Variable Team Description Paper RoboCup 2018 Rescue Virtual Robot League
 Global Variable Team Description Paper RoboCup 2018 Rescue Virtual Robot League Tahir Mehmood 1, Dereck Wonnacot 2, Arsalan Akhter 3, Ammar Ajmal 4, Zakka Ahmed 5, Ivan de Jesus Pereira Pinto 6,,Saad Ullah
Global Variable Team Description Paper RoboCup 2018 Rescue Virtual Robot League Tahir Mehmood 1, Dereck Wonnacot 2, Arsalan Akhter 3, Ammar Ajmal 4, Zakka Ahmed 5, Ivan de Jesus Pereira Pinto 6,,Saad Ullah
S.P.Q.R. Legged Team Report from RoboCup 2003
 S.P.Q.R. Legged Team Report from RoboCup 2003 L. Iocchi and D. Nardi Dipartimento di Informatica e Sistemistica Universitá di Roma La Sapienza Via Salaria 113-00198 Roma, Italy {iocchi,nardi}@dis.uniroma1.it,
S.P.Q.R. Legged Team Report from RoboCup 2003 L. Iocchi and D. Nardi Dipartimento di Informatica e Sistemistica Universitá di Roma La Sapienza Via Salaria 113-00198 Roma, Italy {iocchi,nardi}@dis.uniroma1.it,
BORG. The team of the University of Groningen Team Description Paper
 BORG The RoboCup@Home team of the University of Groningen Team Description Paper Tim van Elteren, Paul Neculoiu, Christof Oost, Amirhosein Shantia, Ron Snijders, Egbert van der Wal, and Tijn van der Zant
BORG The RoboCup@Home team of the University of Groningen Team Description Paper Tim van Elteren, Paul Neculoiu, Christof Oost, Amirhosein Shantia, Ron Snijders, Egbert van der Wal, and Tijn van der Zant
Keywords: Multi-robot adversarial environments, real-time autonomous robots
 ROBOT SOCCER: A MULTI-ROBOT CHALLENGE EXTENDED ABSTRACT Manuela M. Veloso School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213, USA veloso@cs.cmu.edu Abstract Robot soccer opened
ROBOT SOCCER: A MULTI-ROBOT CHALLENGE EXTENDED ABSTRACT Manuela M. Veloso School of Computer Science Carnegie Mellon University Pittsburgh, PA 15213, USA veloso@cs.cmu.edu Abstract Robot soccer opened
Partner Robot Challenge Real Space
 Partner Robot Challenge Real Space Rules & Regulations Version: 2018 Rev-Unknown Last Build Date: December 30, 2017 Time: 820 Last Revision Date: Unknown About this rulebook This is the official rulebook
Partner Robot Challenge Real Space Rules & Regulations Version: 2018 Rev-Unknown Last Build Date: December 30, 2017 Time: 820 Last Revision Date: Unknown About this rulebook This is the official rulebook
Robots
 Robots Helping @Home and @Work Pedro U. Lima (IST, U. Lisboa) (Project Coordinator) Robot Competitions Kick Innovation in Cognitive Systems and Robotics Consortium and Boards Associação do Instituto Superior
Robots Helping @Home and @Work Pedro U. Lima (IST, U. Lisboa) (Project Coordinator) Robot Competitions Kick Innovation in Cognitive Systems and Robotics Consortium and Boards Associação do Instituto Superior
EDUCATIONAL ROBOTICS' INTRODUCTORY COURSE
 AESTIT EDUCATIONAL ROBOTICS' INTRODUCTORY COURSE Manuel Filipe P. C. M. Costa University of Minho Robotics in the classroom Robotics competitions The vast majority of students learn in a concrete manner
AESTIT EDUCATIONAL ROBOTICS' INTRODUCTORY COURSE Manuel Filipe P. C. M. Costa University of Minho Robotics in the classroom Robotics competitions The vast majority of students learn in a concrete manner
2 Focus of research and research interests
 The Reem@LaSalle 2014 Robocup@Home Team Description Chang L. Zhu 1, Roger Boldú 1, Cristina de Saint Germain 1, Sergi X. Ubach 1, Jordi Albó 1 and Sammy Pfeiffer 2 1 La Salle, Ramon Llull University, Barcelona,
The Reem@LaSalle 2014 Robocup@Home Team Description Chang L. Zhu 1, Roger Boldú 1, Cristina de Saint Germain 1, Sergi X. Ubach 1, Jordi Albó 1 and Sammy Pfeiffer 2 1 La Salle, Ramon Llull University, Barcelona,
Synthetical Benchmarking of Service Robots: A First Effort on Domestic Mobile Platforms
 Synthetical Benchmarking of Service Robots: A First Effort on Domestic Mobile Platforms Min Cheng 1(B), Xiaoping Chen 1, Keke Tang 1, Feng Wu 1, Andras Kupcsik 3, Luca Iocchi 2, Yingfeng Chen 1,andDavidHsu
Synthetical Benchmarking of Service Robots: A First Effort on Domestic Mobile Platforms Min Cheng 1(B), Xiaoping Chen 1, Keke Tang 1, Feng Wu 1, Andras Kupcsik 3, Luca Iocchi 2, Yingfeng Chen 1,andDavidHsu
UvA Rescue - Team Description Paper - Infrastructure competition - Rescue Simulation League RoboCup João Pessoa - Brazil Visser, A.
 UvA-DARE (Digital Academic Repository) UvA Rescue - Team Description Paper - Infrastructure competition - Rescue Simulation League RoboCup 2014 - João Pessoa - Brazil Visser, A. Link to publication Citation
UvA-DARE (Digital Academic Repository) UvA Rescue - Team Description Paper - Infrastructure competition - Rescue Simulation League RoboCup 2014 - João Pessoa - Brazil Visser, A. Link to publication Citation
CS 309: Autonomous Intelligent Robotics FRI I. Instructor: Justin Hart.
 CS 309: Autonomous Intelligent Robotics FRI I Instructor: Justin Hart http://justinhart.net/teaching/2017_fall_cs378/ Today Basic Information, Preliminaries FRI Autonomous Robots Overview Panel with the
CS 309: Autonomous Intelligent Robotics FRI I Instructor: Justin Hart http://justinhart.net/teaching/2017_fall_cs378/ Today Basic Information, Preliminaries FRI Autonomous Robots Overview Panel with the
EMERGENCE OF COMMUNICATION IN TEAMS OF EMBODIED AND SITUATED AGENTS
 EMERGENCE OF COMMUNICATION IN TEAMS OF EMBODIED AND SITUATED AGENTS DAVIDE MAROCCO STEFANO NOLFI Institute of Cognitive Science and Technologies, CNR, Via San Martino della Battaglia 44, Rome, 00185, Italy
EMERGENCE OF COMMUNICATION IN TEAMS OF EMBODIED AND SITUATED AGENTS DAVIDE MAROCCO STEFANO NOLFI Institute of Cognitive Science and Technologies, CNR, Via San Martino della Battaglia 44, Rome, 00185, Italy
RoboCup Rescue - Robot League League Talk. Johannes Pellenz RoboCup Rescue Exec
 RoboCup Rescue - Robot League League Talk Johannes Pellenz RoboCup Rescue Exec Disaster Is the building still safe? Victims? Todays tools Disaster Is the building still safe? Victims? Disaster Is the building
RoboCup Rescue - Robot League League Talk Johannes Pellenz RoboCup Rescue Exec Disaster Is the building still safe? Victims? Todays tools Disaster Is the building still safe? Victims? Disaster Is the building
Benchmarks and Good Experimental Methods in
 Benchmarks and Good Experimental Methods in Robotics Research Angel P. del Pobil Universitat Jaume I, Spain RSS 08 Workshop Zürich June 28, 2008 1 Research Benchmarks: Goals a) Consolidate currents efforts
Benchmarks and Good Experimental Methods in Robotics Research Angel P. del Pobil Universitat Jaume I, Spain RSS 08 Workshop Zürich June 28, 2008 1 Research Benchmarks: Goals a) Consolidate currents efforts
Artificial Intelligence: Implications for Autonomous Weapons. Stuart Russell University of California, Berkeley
 Artificial Intelligence: Implications for Autonomous Weapons Stuart Russell University of California, Berkeley Outline AI and autonomy State of the art Likely future developments Conclusions What is AI?
Artificial Intelligence: Implications for Autonomous Weapons Stuart Russell University of California, Berkeley Outline AI and autonomy State of the art Likely future developments Conclusions What is AI?
Rules & Regulations. Version: 2016 Rev-404 Last Build Date: May 5, 2016 Time: 933 Last Revision Date:
 RoboCup@Home Rules & Regulations Version: 2016 Rev-404 Last Build Date: May 5, 2016 Time: 933 Last Revision Date: 2016-05-05 About this rulebook This is the official rulebook of the RoboCup@Home competition
RoboCup@Home Rules & Regulations Version: 2016 Rev-404 Last Build Date: May 5, 2016 Time: 933 Last Revision Date: 2016-05-05 About this rulebook This is the official rulebook of the RoboCup@Home competition
Construction of Mobile Robots
 Construction of Mobile Robots 716.091 Institute for Software Technology 1 Previous Years Conference Robot https://www.youtube.com/watch?v=wu7zyzja89i Breakfast Robot https://youtu.be/dtoqiklqcug 2 This
Construction of Mobile Robots 716.091 Institute for Software Technology 1 Previous Years Conference Robot https://www.youtube.com/watch?v=wu7zyzja89i Breakfast Robot https://youtu.be/dtoqiklqcug 2 This
RoCKIn and the European Robotics League: Building on RoboCup Best Practices to Promote Robot Competitions in Europe
 RoCKIn and the European Robotics League: Building on RoboCup Best Practices to Promote Robot Competitions in Europe Pedro U. Lima 1, Daniele Nardi 2, Gerhard K. Kraetzschmar 3, Rainer Bischoff 4, and Matteo
RoCKIn and the European Robotics League: Building on RoboCup Best Practices to Promote Robot Competitions in Europe Pedro U. Lima 1, Daniele Nardi 2, Gerhard K. Kraetzschmar 3, Rainer Bischoff 4, and Matteo
SECOND YEAR PROJECT SUMMARY
 SECOND YEAR PROJECT SUMMARY Grant Agreement number: 215805 Project acronym: Project title: CHRIS Cooperative Human Robot Interaction Systems Period covered: from 01 March 2009 to 28 Feb 2010 Contact Details
SECOND YEAR PROJECT SUMMARY Grant Agreement number: 215805 Project acronym: Project title: CHRIS Cooperative Human Robot Interaction Systems Period covered: from 01 March 2009 to 28 Feb 2010 Contact Details
Artificial Intelligence: Implications for Autonomous Weapons. Stuart Russell University of California, Berkeley
 Artificial Intelligence: Implications for Autonomous Weapons Stuart Russell University of California, Berkeley Outline Remit [etc] AI in the context of autonomous weapons State of the Art Likely future
Artificial Intelligence: Implications for Autonomous Weapons Stuart Russell University of California, Berkeley Outline Remit [etc] AI in the context of autonomous weapons State of the Art Likely future
RoboCup. Presented by Shane Murphy April 24, 2003
 RoboCup Presented by Shane Murphy April 24, 2003 RoboCup: : Today and Tomorrow What we have learned Authors Minoru Asada (Osaka University, Japan), Hiroaki Kitano (Sony CS Labs, Japan), Itsuki Noda (Electrotechnical(
RoboCup Presented by Shane Murphy April 24, 2003 RoboCup: : Today and Tomorrow What we have learned Authors Minoru Asada (Osaka University, Japan), Hiroaki Kitano (Sony CS Labs, Japan), Itsuki Noda (Electrotechnical(
Learning and Using Models of Kicking Motions for Legged Robots
 Learning and Using Models of Kicking Motions for Legged Robots Sonia Chernova and Manuela Veloso Computer Science Department Carnegie Mellon University Pittsburgh, PA 15213 {soniac, mmv}@cs.cmu.edu Abstract
Learning and Using Models of Kicking Motions for Legged Robots Sonia Chernova and Manuela Veloso Computer Science Department Carnegie Mellon University Pittsburgh, PA 15213 {soniac, mmv}@cs.cmu.edu Abstract
Team Description
 NimbRo@Home 2014 Team Description Max Schwarz, Jörg Stückler, David Droeschel, Kathrin Gräve, Dirk Holz, Michael Schreiber, and Sven Behnke Rheinische Friedrich-Wilhelms-Universität Bonn Computer Science
NimbRo@Home 2014 Team Description Max Schwarz, Jörg Stückler, David Droeschel, Kathrin Gräve, Dirk Holz, Michael Schreiber, and Sven Behnke Rheinische Friedrich-Wilhelms-Universität Bonn Computer Science
Cognitive robots and emotional intelligence Cloud robotics Ethical, legal and social issues of robotic Construction robots Human activities in many
 Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Cognitive Systems and Robotics: opportunities in FP7
 Cognitive Systems and Robotics: opportunities in FP7 Austrian Robotics Summit July 3, 2009 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media European
Cognitive Systems and Robotics: opportunities in FP7 Austrian Robotics Summit July 3, 2009 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media European
Human-Robot Interaction
 Human-Robot Interaction 91.451 Robotics II Prof. Yanco Spring 2005 Prof. Yanco 91.451 Robotics II, Spring 2005 HRI Lecture, Slide 1 What is Human-Robot Interaction (HRI)? Prof. Yanco 91.451 Robotics II,
Human-Robot Interaction 91.451 Robotics II Prof. Yanco Spring 2005 Prof. Yanco 91.451 Robotics II, Spring 2005 HRI Lecture, Slide 1 What is Human-Robot Interaction (HRI)? Prof. Yanco 91.451 Robotics II,
Hierarchical Controller for Robotic Soccer
 Hierarchical Controller for Robotic Soccer Byron Knoll Cognitive Systems 402 April 13, 2008 ABSTRACT RoboCup is an initiative aimed at advancing Artificial Intelligence (AI) and robotics research. This
Hierarchical Controller for Robotic Soccer Byron Knoll Cognitive Systems 402 April 13, 2008 ABSTRACT RoboCup is an initiative aimed at advancing Artificial Intelligence (AI) and robotics research. This
Learning and Using Models of Kicking Motions for Legged Robots
 Learning and Using Models of Kicking Motions for Legged Robots Sonia Chernova and Manuela Veloso Computer Science Department Carnegie Mellon University Pittsburgh, PA 15213 {soniac, mmv}@cs.cmu.edu Abstract
Learning and Using Models of Kicking Motions for Legged Robots Sonia Chernova and Manuela Veloso Computer Science Department Carnegie Mellon University Pittsburgh, PA 15213 {soniac, mmv}@cs.cmu.edu Abstract
A Responsive Vision System to Support Human-Robot Interaction
 A Responsive Vision System to Support Human-Robot Interaction Bruce A. Maxwell, Brian M. Leighton, and Leah R. Perlmutter Colby College {bmaxwell, bmleight, lrperlmu}@colby.edu Abstract Humanoid robots
A Responsive Vision System to Support Human-Robot Interaction Bruce A. Maxwell, Brian M. Leighton, and Leah R. Perlmutter Colby College {bmaxwell, bmleight, lrperlmu}@colby.edu Abstract Humanoid robots
SPQR RoboCup 2014 Standard Platform League Team Description Paper
 SPQR RoboCup 2014 Standard Platform League Team Description Paper G. Gemignani, F. Riccio, L. Iocchi, D. Nardi Department of Computer, Control, and Management Engineering Sapienza University of Rome, Italy
SPQR RoboCup 2014 Standard Platform League Team Description Paper G. Gemignani, F. Riccio, L. Iocchi, D. Nardi Department of Computer, Control, and Management Engineering Sapienza University of Rome, Italy
An Agent-Based Architecture for an Adaptive Human-Robot Interface
 An Agent-Based Architecture for an Adaptive Human-Robot Interface Kazuhiko Kawamura, Phongchai Nilas, Kazuhiko Muguruma, Julie A. Adams, and Chen Zhou Center for Intelligent Systems Vanderbilt University
An Agent-Based Architecture for an Adaptive Human-Robot Interface Kazuhiko Kawamura, Phongchai Nilas, Kazuhiko Muguruma, Julie A. Adams, and Chen Zhou Center for Intelligent Systems Vanderbilt University
Towards Intuitive Industrial Human-Robot Collaboration
 Towards Intuitive Industrial Human-Robot Collaboration System Design and Future Directions Ferdinand Fuhrmann, Wolfgang Weiß, Lucas Paletta, Bernhard Reiterer, Andreas Schlotzhauer, Mathias Brandstötter
Towards Intuitive Industrial Human-Robot Collaboration System Design and Future Directions Ferdinand Fuhrmann, Wolfgang Weiß, Lucas Paletta, Bernhard Reiterer, Andreas Schlotzhauer, Mathias Brandstötter
SIGVerse - A Simulation Platform for Human-Robot Interaction Jeffrey Too Chuan TAN and Tetsunari INAMURA National Institute of Informatics, Japan The
 SIGVerse - A Simulation Platform for Human-Robot Interaction Jeffrey Too Chuan TAN and Tetsunari INAMURA National Institute of Informatics, Japan The 29 th Annual Conference of The Robotics Society of
SIGVerse - A Simulation Platform for Human-Robot Interaction Jeffrey Too Chuan TAN and Tetsunari INAMURA National Institute of Informatics, Japan The 29 th Annual Conference of The Robotics Society of
Knowledge Representation and Cognition in Natural Language Processing
 Knowledge Representation and Cognition in Natural Language Processing Gemignani Guglielmo Sapienza University of Rome January 17 th 2013 The European Projects Surveyed the FP6 and FP7 projects involving
Knowledge Representation and Cognition in Natural Language Processing Gemignani Guglielmo Sapienza University of Rome January 17 th 2013 The European Projects Surveyed the FP6 and FP7 projects involving
We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists. International authors and editors
 We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists 4,000 116,000 120M Open access books available International authors and editors Downloads Our
We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists 4,000 116,000 120M Open access books available International authors and editors Downloads Our
CS295-1 Final Project : AIBO
 CS295-1 Final Project : AIBO Mert Akdere, Ethan F. Leland December 20, 2005 Abstract This document is the final report for our CS295-1 Sensor Data Management Course Final Project: Project AIBO. The main
CS295-1 Final Project : AIBO Mert Akdere, Ethan F. Leland December 20, 2005 Abstract This document is the final report for our CS295-1 Sensor Data Management Course Final Project: Project AIBO. The main
Using Gestures to Interact with a Service Robot using Kinect 2
 Using Gestures to Interact with a Service Robot using Kinect 2 Harold Andres Vasquez 1, Hector Simon Vargas 1, and L. Enrique Sucar 2 1 Popular Autonomous University of Puebla, Puebla, Pue., Mexico {haroldandres.vasquez,hectorsimon.vargas}@upaep.edu.mx
Using Gestures to Interact with a Service Robot using Kinect 2 Harold Andres Vasquez 1, Hector Simon Vargas 1, and L. Enrique Sucar 2 1 Popular Autonomous University of Puebla, Puebla, Pue., Mexico {haroldandres.vasquez,hectorsimon.vargas}@upaep.edu.mx
COMP219: Artificial Intelligence. Lecture 2: AI Problems and Applications
 COMP219: Artificial Intelligence Lecture 2: AI Problems and Applications 1 Introduction Last time General module information Characterisation of AI and what it is about Today Overview of some common AI
COMP219: Artificial Intelligence Lecture 2: AI Problems and Applications 1 Introduction Last time General module information Characterisation of AI and what it is about Today Overview of some common AI
World Robot Summit. January 2018 Ministry of Economy, Trade and Industry (METI) New Energy and Industrial Technology Development Organization (NEDO)
 New Energy and Industrial Technology Development Organization (NEDO)") (Appendix 1) World Robot Summit January 2018 Ministry of Economy, Trade and Industry (METI) New Energy and Industrial Technology Development Organization (NEDO) Concept The World Robot Summit (WRS) is
(Appendix 1) World Robot Summit January 2018 Ministry of Economy, Trade and Industry (METI) New Energy and Industrial Technology Development Organization (NEDO) Concept The World Robot Summit (WRS) is
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
Challenge 2 in FP7 ICT Call 9
 Challenge 2 in FP7 ICT Call 9 Information Day Tel Aviv, 31 January 2012 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media European Commission
Challenge 2 in FP7 ICT Call 9 Information Day Tel Aviv, 31 January 2012 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media European Commission
RCAP CoSpace Rescue Rules 2017
 RCAP CoSpace Rescue Rules 2017 This document contains the official rules for the RoboCup Asia Pacific (RCAP) 2017 CoSpace Rescue Challenge. They are released by the RoboCup Asia Pacific CoSpace Rescue
RCAP CoSpace Rescue Rules 2017 This document contains the official rules for the RoboCup Asia Pacific (RCAP) 2017 CoSpace Rescue Challenge. They are released by the RoboCup Asia Pacific CoSpace Rescue
FP7 ICT Call 6: Cognitive Systems and Robotics
 FP7 ICT Call 6: Cognitive Systems and Robotics Information day Luxembourg, January 14, 2010 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media
FP7 ICT Call 6: Cognitive Systems and Robotics Information day Luxembourg, January 14, 2010 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media
INSTITUTO de SISTEMAS E ROBÓTICA Institute for Systems and Robotics
 - Lisboa INSTITUTO de SISTEMAS E ROBÓTICA Mission and Goals ISR-Lisbon is an RD&I institution, affiliated to the Instituto Superior Técnico (IST), where multidisciplinary advanced research activities are
- Lisboa INSTITUTO de SISTEMAS E ROBÓTICA Mission and Goals ISR-Lisbon is an RD&I institution, affiliated to the Instituto Superior Técnico (IST), where multidisciplinary advanced research activities are
Daniele Nardi, Luca Iocchi, and Luigia Carlucci Aiello
 RoboCup@Sapienza Daniele Nardi, Luca Iocchi, and Luigia Carlucci Aiello Dept. of Computer, Control, and Management Engineering, Sapienza University of Rome, via Ariosto 25, 00185, Rome, Italy {nardi,iocchi,aiello}@dis.uniroma1.it
RoboCup@Sapienza Daniele Nardi, Luca Iocchi, and Luigia Carlucci Aiello Dept. of Computer, Control, and Management Engineering, Sapienza University of Rome, via Ariosto 25, 00185, Rome, Italy {nardi,iocchi,aiello}@dis.uniroma1.it
UChile Team Research Report 2009
 UChile Team Research Report 2009 Javier Ruiz-del-Solar, Rodrigo Palma-Amestoy, Pablo Guerrero, Román Marchant, Luis Alberto Herrera, David Monasterio Department of Electrical Engineering, Universidad de
UChile Team Research Report 2009 Javier Ruiz-del-Solar, Rodrigo Palma-Amestoy, Pablo Guerrero, Román Marchant, Luis Alberto Herrera, David Monasterio Department of Electrical Engineering, Universidad de
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
RoboCupJunior Rescue B Rules 2012
 RoboCupJunior Rescue B Rules 2012 RoboCupJunior Rescue - Technical Committee 2012 Damien Kee (Australia), damien@domabotics.com Kate Sim (UK), kateasim@btinternet.com Naomi Chikuma (Japan) mymama_8888@yahoo.co.jp
RoboCupJunior Rescue B Rules 2012 RoboCupJunior Rescue - Technical Committee 2012 Damien Kee (Australia), damien@domabotics.com Kate Sim (UK), kateasim@btinternet.com Naomi Chikuma (Japan) mymama_8888@yahoo.co.jp
Applying CSCW and HCI Techniques to Human-Robot Interaction
 Applying CSCW and HCI Techniques to Human-Robot Interaction Jill L. Drury Jean Scholtz Holly A. Yanco The MITRE Corporation National Institute of Standards Computer Science Dept. Mail Stop K320 and Technology
Applying CSCW and HCI Techniques to Human-Robot Interaction Jill L. Drury Jean Scholtz Holly A. Yanco The MITRE Corporation National Institute of Standards Computer Science Dept. Mail Stop K320 and Technology
Towards Integrated Soccer Robots
 Towards Integrated Soccer Robots Wei-Min Shen, Jafar Adibi, Rogelio Adobbati, Bonghan Cho, Ali Erdem, Hadi Moradi, Behnam Salemi, Sheila Tejada Information Sciences Institute and Computer Science Department
Towards Integrated Soccer Robots Wei-Min Shen, Jafar Adibi, Rogelio Adobbati, Bonghan Cho, Ali Erdem, Hadi Moradi, Behnam Salemi, Sheila Tejada Information Sciences Institute and Computer Science Department
Commanding a service robot by natural language.
 Master in Artificial Intelligence (UPC-URV-UB) Master of Science Thesis RoboCup@Home. Commanding a service robot by natural language. Jordi-Ysard Puigbò Llobet Advisor/s: Dr. Cecilio Angulo Bahón 09/09/2013
Master in Artificial Intelligence (UPC-URV-UB) Master of Science Thesis RoboCup@Home. Commanding a service robot by natural language. Jordi-Ysard Puigbò Llobet Advisor/s: Dr. Cecilio Angulo Bahón 09/09/2013
How can Robots learn from Honeybees?
 How can Robots learn from Honeybees? Karl Crailsheim, Ronald Thenius, ChristophMöslinger, Thomas Schmickl Apimondia 2009, Montpellier Beyond robotics Definition of robot : Robots A device that automatically
How can Robots learn from Honeybees? Karl Crailsheim, Ronald Thenius, ChristophMöslinger, Thomas Schmickl Apimondia 2009, Montpellier Beyond robotics Definition of robot : Robots A device that automatically
Building Perceptive Robots with INTEL Euclid Development kit
 Building Perceptive Robots with INTEL Euclid Development kit Amit Moran Perceptual Computing Systems Innovation 2 2 3 A modern robot should Perform a task Find its way in our world and move safely Understand
Building Perceptive Robots with INTEL Euclid Development kit Amit Moran Perceptual Computing Systems Innovation 2 2 3 A modern robot should Perform a task Find its way in our world and move safely Understand
The Rat s Life Benchmark: Competing Cognitive Robots
 The Rat s Life Benchmark: Competing Cognitive Robots Olivier Michel Cyberbotics Ltd. PSE C - EPFL 1015 Lausanne, Switzerland Olivier.Michel@cyberbotics.com (Invited Paper) Fabien Rohrer Cyberbotics Ltd.
The Rat s Life Benchmark: Competing Cognitive Robots Olivier Michel Cyberbotics Ltd. PSE C - EPFL 1015 Lausanne, Switzerland Olivier.Michel@cyberbotics.com (Invited Paper) Fabien Rohrer Cyberbotics Ltd.
2. Publishable summary
 2. Publishable summary CogLaboration (Successful real World Human-Robot Collaboration: from the cognition of human-human collaboration to fluent human-robot collaboration) is a specific targeted research
2. Publishable summary CogLaboration (Successful real World Human-Robot Collaboration: from the cognition of human-human collaboration to fluent human-robot collaboration) is a specific targeted research
1 Publishable summary
 1 Publishable summary 1.1 Introduction The DIRHA (Distant-speech Interaction for Robust Home Applications) project was launched as STREP project FP7-288121 in the Commission s Seventh Framework Programme
1 Publishable summary 1.1 Introduction The DIRHA (Distant-speech Interaction for Robust Home Applications) project was launched as STREP project FP7-288121 in the Commission s Seventh Framework Programme
Human-Swarm Interaction
 Human-Swarm Interaction a brief primer Andreas Kolling irobot Corp. Pasadena, CA Swarm Properties - simple and distributed - from the operator s perspective - distributed algorithms and information processing
Human-Swarm Interaction a brief primer Andreas Kolling irobot Corp. Pasadena, CA Swarm Properties - simple and distributed - from the operator s perspective - distributed algorithms and information processing
The 2012 Team Description
 The Reem@IRI 2012 Robocup@Home Team Description G. Alenyà 1 and R. Tellez 2 1 Institut de Robòtica i Informàtica Industrial, CSIC-UPC, Llorens i Artigas 4-6, 08028 Barcelona, Spain 2 PAL Robotics, C/Pujades
The Reem@IRI 2012 Robocup@Home Team Description G. Alenyà 1 and R. Tellez 2 1 Institut de Robòtica i Informàtica Industrial, CSIC-UPC, Llorens i Artigas 4-6, 08028 Barcelona, Spain 2 PAL Robotics, C/Pujades
Human-robotic cooperation In the light of Industry 4.0
 Human-robotic cooperation In the light of Industry 4.0 Central European cooperation for Industry 4.0 workshop Dr. Erdős Ferenc Gábor Engineering and Management Intelligence Laboratoty (EMI) Institute for
Human-robotic cooperation In the light of Industry 4.0 Central European cooperation for Industry 4.0 workshop Dr. Erdős Ferenc Gábor Engineering and Management Intelligence Laboratoty (EMI) Institute for
A*STAR Unveils Singapore s First Social Robots at Robocup2010
 MEDIA RELEASE Singapore, 21 June 2010 Total: 6 pages A*STAR Unveils Singapore s First Social Robots at Robocup2010 Visit Suntec City to experience the first social robots - OLIVIA and LUCAS that can see,
MEDIA RELEASE Singapore, 21 June 2010 Total: 6 pages A*STAR Unveils Singapore s First Social Robots at Robocup2010 Visit Suntec City to experience the first social robots - OLIVIA and LUCAS that can see,
H2020 RIA COMANOID H2020-RIA
 Ref. Ares(2016)2533586-01/06/2016 H2020 RIA COMANOID H2020-RIA-645097 Deliverable D4.1: Demonstrator specification report M6 D4.1 H2020-RIA-645097 COMANOID M6 Project acronym: Project full title: COMANOID
Ref. Ares(2016)2533586-01/06/2016 H2020 RIA COMANOID H2020-RIA-645097 Deliverable D4.1: Demonstrator specification report M6 D4.1 H2020-RIA-645097 COMANOID M6 Project acronym: Project full title: COMANOID
Natural Interaction with Social Robots
 Workshop: Natural Interaction with Social Robots Part of the Topig Group with the same name. http://homepages.stca.herts.ac.uk/~comqkd/tg-naturalinteractionwithsocialrobots.html organized by Kerstin Dautenhahn,
Workshop: Natural Interaction with Social Robots Part of the Topig Group with the same name. http://homepages.stca.herts.ac.uk/~comqkd/tg-naturalinteractionwithsocialrobots.html organized by Kerstin Dautenhahn,
ToBI - Team of Bielefeld A Human-Robot Interaction System for 2018
 ToBI - Team of Bielefeld A Human-Robot Interaction System for RoboCup@Home 2018 Sven Wachsmuth, Florian Lier, and Sebastian Meyer zu Borgsen Exzellenzcluster Cognitive Interaction Technology (CITEC), Bielefeld
ToBI - Team of Bielefeld A Human-Robot Interaction System for RoboCup@Home 2018 Sven Wachsmuth, Florian Lier, and Sebastian Meyer zu Borgsen Exzellenzcluster Cognitive Interaction Technology (CITEC), Bielefeld
The world s first collaborative machine-intelligence competition to overcome spectrum scarcity
 The world s first collaborative machine-intelligence competition to overcome spectrum scarcity Paul Tilghman Program Manager, DARPA/MTO 8/11/16 1 This slide intentionally left blank 2 This slide intentionally
The world s first collaborative machine-intelligence competition to overcome spectrum scarcity Paul Tilghman Program Manager, DARPA/MTO 8/11/16 1 This slide intentionally left blank 2 This slide intentionally
ENHANCED HUMAN-AGENT INTERACTION: AUGMENTING INTERACTION MODELS WITH EMBODIED AGENTS BY SERAFIN BENTO. MASTER OF SCIENCE in INFORMATION SYSTEMS
 BY SERAFIN BENTO MASTER OF SCIENCE in INFORMATION SYSTEMS Edmonton, Alberta September, 2015 ABSTRACT The popularity of software agents demands for more comprehensive HAI design processes. The outcome of
BY SERAFIN BENTO MASTER OF SCIENCE in INFORMATION SYSTEMS Edmonton, Alberta September, 2015 ABSTRACT The popularity of software agents demands for more comprehensive HAI design processes. The outcome of
Personalized short-term multi-modal interaction for social robots assisting users in shopping malls
 Personalized short-term multi-modal interaction for social robots assisting users in shopping malls Luca Iocchi 1, Maria Teresa Lázaro 1, Laurent Jeanpierre 2, Abdel-Illah Mouaddib 2 1 Dept. of Computer,
Personalized short-term multi-modal interaction for social robots assisting users in shopping malls Luca Iocchi 1, Maria Teresa Lázaro 1, Laurent Jeanpierre 2, Abdel-Illah Mouaddib 2 1 Dept. of Computer,
The Future of AI A Robotics Perspective
 The Future of AI A Robotics Perspective Wolfram Burgard Autonomous Intelligent Systems Department of Computer Science University of Freiburg Germany The Future of AI My Robotics Perspective Wolfram Burgard
The Future of AI A Robotics Perspective Wolfram Burgard Autonomous Intelligent Systems Department of Computer Science University of Freiburg Germany The Future of AI My Robotics Perspective Wolfram Burgard
Artificial Intelligence and Mobile Robots: Successes and Challenges
 Artificial Intelligence and Mobile Robots: Successes and Challenges David Kortenkamp NASA Johnson Space Center Metrica Inc./TRACLabs Houton TX 77058 kortenkamp@jsc.nasa.gov http://www.traclabs.com/~korten
Artificial Intelligence and Mobile Robots: Successes and Challenges David Kortenkamp NASA Johnson Space Center Metrica Inc./TRACLabs Houton TX 77058 kortenkamp@jsc.nasa.gov http://www.traclabs.com/~korten
Appendices master s degree programme Artificial Intelligence
 Appendices master s degree programme Artificial Intelligence 2015-2016 Appendix I Teaching outcomes of the degree programme (art. 1.3) 1. The master demonstrates knowledge, understanding and the ability
Appendices master s degree programme Artificial Intelligence 2015-2016 Appendix I Teaching outcomes of the degree programme (art. 1.3) 1. The master demonstrates knowledge, understanding and the ability
European Robotics Research: Achievements and challenges
 European Robotics Research: Achievements and challenges Libor Král, Head of Unit, CONNECT A2 Robotics European Commission IROS 2012 Vila Moura, Algarve, Portugal 9 October 2012 European robotics research
European Robotics Research: Achievements and challenges Libor Král, Head of Unit, CONNECT A2 Robotics European Commission IROS 2012 Vila Moura, Algarve, Portugal 9 October 2012 European robotics research
What is AI? AI is the reproduction of human reasoning and intelligent behavior by computational methods. an attempt of. Intelligent behavior Computer
 What is AI? an attempt of AI is the reproduction of human reasoning and intelligent behavior by computational methods Intelligent behavior Computer Humans 1 What is AI? (R&N) Discipline that systematizes
What is AI? an attempt of AI is the reproduction of human reasoning and intelligent behavior by computational methods Intelligent behavior Computer Humans 1 What is AI? (R&N) Discipline that systematizes
Physical Human Robot Interaction
 MIN Faculty Department of Informatics Physical Human Robot Interaction Intelligent Robotics Seminar Ilay Köksal University of Hamburg Faculty of Mathematics, Informatics and Natural Sciences Department
MIN Faculty Department of Informatics Physical Human Robot Interaction Intelligent Robotics Seminar Ilay Köksal University of Hamburg Faculty of Mathematics, Informatics and Natural Sciences Department
What will the robot do during the final demonstration?
 SPENCER Questions & Answers What is project SPENCER about? SPENCER is a European Union-funded research project that advances technologies for intelligent robots that operate in human environments. Such
SPENCER Questions & Answers What is project SPENCER about? SPENCER is a European Union-funded research project that advances technologies for intelligent robots that operate in human environments. Such
Rescue Robotics Camp 2013 Going 3D Oct 21-23, 2013 Linköping, Sweden. SSRR Camp Welcome Notes
 SSRR Camp 2013 Welcome Notes some History follows a long tradition of events: SSRR Summer School 2012, Alanya, Turkey ROS RoboCup Rescue Summerschool 2012, Graz, Austria Resecue & ROS Workshop 2011, Koblenz
SSRR Camp 2013 Welcome Notes some History follows a long tradition of events: SSRR Summer School 2012, Alanya, Turkey ROS RoboCup Rescue Summerschool 2012, Graz, Austria Resecue & ROS Workshop 2011, Koblenz
Essay on A Survey of Socially Interactive Robots Authors: Terrence Fong, Illah Nourbakhsh, Kerstin Dautenhahn Summarized by: Mehwish Alam
 1 Introduction Essay on A Survey of Socially Interactive Robots Authors: Terrence Fong, Illah Nourbakhsh, Kerstin Dautenhahn Summarized by: Mehwish Alam 1.1 Social Robots: Definition: Social robots are
1 Introduction Essay on A Survey of Socially Interactive Robots Authors: Terrence Fong, Illah Nourbakhsh, Kerstin Dautenhahn Summarized by: Mehwish Alam 1.1 Social Robots: Definition: Social robots are
Content. 3 Preface 4 Who We Are 6 The RoboCup Initiative 7 Our Robots 8 Hardware 10 Software 12 Public Appearances 14 Achievements 15 Interested?
 Content 3 Preface 4 Who We Are 6 The RoboCup Initiative 7 Our Robots 8 Hardware 10 Software 12 Public Appearances 14 Achievements 15 Interested? 2 Preface Dear reader, Robots are in everyone's minds nowadays.
Content 3 Preface 4 Who We Are 6 The RoboCup Initiative 7 Our Robots 8 Hardware 10 Software 12 Public Appearances 14 Achievements 15 Interested? 2 Preface Dear reader, Robots are in everyone's minds nowadays.
TOWARDS THE ROBOT BUTLER: THE HUMABOT CHALLENGE Enric Cervera, Juan Carlos García, Pedro J. Sanz
 TOWARDS THE ROBOT BUTLER: THE HUMABOT CHALLENGE Enric Cervera, Juan Carlos García, Pedro J. Sanz Department of Computer Science and Engineering, University of Jaume I, Castellón, Spain {ecervera,garciaju,sanzp}@uji.es
TOWARDS THE ROBOT BUTLER: THE HUMABOT CHALLENGE Enric Cervera, Juan Carlos García, Pedro J. Sanz Department of Computer Science and Engineering, University of Jaume I, Castellón, Spain {ecervera,garciaju,sanzp}@uji.es
Nao Devils Dortmund. Team Description for RoboCup Matthias Hofmann, Ingmar Schwarz, and Oliver Urbann
 Nao Devils Dortmund Team Description for RoboCup 2014 Matthias Hofmann, Ingmar Schwarz, and Oliver Urbann Robotics Research Institute Section Information Technology TU Dortmund University 44221 Dortmund,
Nao Devils Dortmund Team Description for RoboCup 2014 Matthias Hofmann, Ingmar Schwarz, and Oliver Urbann Robotics Research Institute Section Information Technology TU Dortmund University 44221 Dortmund,
Autonomous Mobile Service Robots For Humans, With Human Help, and Enabling Human Remote Presence
 Autonomous Mobile Service Robots For Humans, With Human Help, and Enabling Human Remote Presence Manuela Veloso, Stephanie Rosenthal, Rodrigo Ventura*, Brian Coltin, and Joydeep Biswas School of Computer
Autonomous Mobile Service Robots For Humans, With Human Help, and Enabling Human Remote Presence Manuela Veloso, Stephanie Rosenthal, Rodrigo Ventura*, Brian Coltin, and Joydeep Biswas School of Computer
Using Reactive and Adaptive Behaviors to Play Soccer
 AI Magazine Volume 21 Number 3 (2000) ( AAAI) Articles Using Reactive and Adaptive Behaviors to Play Soccer Vincent Hugel, Patrick Bonnin, and Pierre Blazevic This work deals with designing simple behaviors
AI Magazine Volume 21 Number 3 (2000) ( AAAI) Articles Using Reactive and Adaptive Behaviors to Play Soccer Vincent Hugel, Patrick Bonnin, and Pierre Blazevic This work deals with designing simple behaviors
2. Visually- Guided Grasping (3D)
") Autonomous Robotic Manipulation (3/4) Pedro J Sanz sanzp@uji.es 2. Visually- Guided Grasping (3D) April 2010 Fundamentals of Robotics (UdG) 2 1 Other approaches for finding 3D grasps Analyzing complete
Autonomous Robotic Manipulation (3/4) Pedro J Sanz sanzp@uji.es 2. Visually- Guided Grasping (3D) April 2010 Fundamentals of Robotics (UdG) 2 1 Other approaches for finding 3D grasps Analyzing complete
WORLD ROBOT OLYMPIAD Advanced Robotics Challenge Game Description, Rules and Scoring SMART GREENHOUSE
 WORLD ROBOT OLYMPIAD 2019 Advanced Robotics Challenge Game Description, Rules and Scoring SMART GREENHOUSE Introduction Robotics is a wonderful platform for learning 21st century skills, solving robotic
WORLD ROBOT OLYMPIAD 2019 Advanced Robotics Challenge Game Description, Rules and Scoring SMART GREENHOUSE Introduction Robotics is a wonderful platform for learning 21st century skills, solving robotic
FU-Fighters. The Soccer Robots of Freie Universität Berlin. Why RoboCup? What is RoboCup?
 The Soccer Robots of Freie Universität Berlin We have been building autonomous mobile robots since 1998. Our team, composed of students and researchers from the Mathematics and Computer Science Department,
The Soccer Robots of Freie Universität Berlin We have been building autonomous mobile robots since 1998. Our team, composed of students and researchers from the Mathematics and Computer Science Department,
Building Integrated Mobile Robots for Soccer Competition
 Building Integrated Mobile Robots for Soccer Competition Wei-Min Shen, Jafar Adibi, Rogelio Adobbati, Bonghan Cho, Ali Erdem, Hadi Moradi, Behnam Salemi, Sheila Tejada Computer Science Department / Information
Building Integrated Mobile Robots for Soccer Competition Wei-Min Shen, Jafar Adibi, Rogelio Adobbati, Bonghan Cho, Ali Erdem, Hadi Moradi, Behnam Salemi, Sheila Tejada Computer Science Department / Information