Human-Robot Companionships. Mark Neerincx
|
|
|
- Meagan Sanders
- 5 years ago
- Views:
Transcription


1 Human-Robot Companionships Mark Neerincx





2 TNO and DUT Perceptual and Cognitive Systems Interactive Intelligence International User-Centred Robot R&D Delft Robotics Institute
.")
, it denoted fabricated, artificial human-like")
3 What is a robot? The word robot is derived from the Czech word robota which means serf (labor). In a1920 play of Čapek,, called R.U.R. (Rossum's Universal Robots), it denoted fabricated, artificial human-like beings. A robot is (Russell and Norvig): physical agent manipulates the physical world has sensors has effectors
4 What is a social robot? Merrian-Webster: marked by or passed in pleasant companionship with friends or associates tending to form cooperative and interdependent relationships with others living and breeding in more or less organized communities




5 Misconceptions (should) resemble humans




6 Misconceptions (should) resemble humans can hardly do anything

7 Misconceptions (should) resemble humans can hardly do anything will replace humans
8 Misconceptions (should) resemble humans can hardly do anything will replace humans act (completely) autonomously







9 Evolution of Robots Ishigur, Geminoid HI-1 Androids HRP-4C











10 Evolving Human-Robot Fellowships



11 Human-Robot Collaboration in NIFTi and TRADR Mark Neerincx





12

13 Imperial College London Adaptive cognitive interaction TNO - Delft User modelling University of Hertfordshire Adaptive affective interaction University of Plymouth Long-term memory Aldebaran URBI, Cloud computing and platform Fondazione Centro San Raffaele and Ospidale San Raffaele Evaluation site Vrije Universiteit Brussel A&V perception and production DFKI - Saarbrücken Natural language CNR - Padova Speech recognition and production
 dynamic harmonization of these behaviors to the child, the activity and the context, over sustained periods of child-robot interactions Method:")
14 Introduction Goal: Situated user, context and interaction models, which can evoke both reflective and intentional-strategic robot behaviours empathic, persuasive and engaging robot behaviours for the companion, educator and motivator roles (real-time) dynamic harmonization of these behaviors to the child, the activity and the context, over sustained periods of child-robot interactions Method: Iterative, incremental design and test of the model-based behaviors for the individual user experiences and behaviors addressing the social environment
15 One of the Research Questions How can a personalized adaptive robot help to advance the knowledge, coping behavior and experiences of children with diabetes, by adapting its behavior based on user and context models?



16 Robot as a Quiz Playfellow 22 children played the quiz with another child and with the robot They enjoyed playing with the robot, expressing more emotions Reserved ( introvert ) children were more at ease and confident with the robot Children with age of 7-9 experienced the robot more as a peer than age Girls shared more compliments, whereas boys were more expressive when they were right Recommendations to enrich robot with thinking behaviors, looking up/down, putting hand in front of face, and surprise expressions



17 A Physically Embodied Playfellow Effects of a physical versus virtual robot? Knowledge Attention Trust, Enjoyment, Preferences The physical embodiment of the Nao has a consistent positive effect on attention and is preferred by the children over a virtual embodiment Observations on Collaborative Learning: Children were pride on their performance; when the Nao reflected on their performance and this surpassed Nao s score, they became more competitive and excited




18 The Foundation of Robot Design Knowledge is required Quiz supports learning Zone of Proximal Development Scaffolding Learning Goals Emotion Accommodation Foundation Operational Demands Human Factors Knowledge Technology Innovation
19 Situated Cognitive Engineering Adapt robot state to activity and child state Objective Long-term interaction Mapping of multimodal Nao expressions on affect space Function shapes Interaction Design pattern brings about Effect measures Instrument Emotion contagion Observation
20 Concept map for robot s adaptation
21
22 Concept map for Emotion Expression

23 Emotion Expression

24 Evolutionary development Specification Prototype Simulation Evaluation Foundation Operational Demands Human Factors Knowledge Technology Innovation Test Results
 contextualize Requirements (what) justify Claims")
25 Design Rationale Interaction Design Patterns (how) shape Use Case (where, when, who) contextualize Requirements (what) justify Claims (why)





26 Affective Body Postures Scared: yellow, orange eyes. Head, side. Arms, shield eyes. Happy: light eyes. Arms up, straight postures. Angry: red eyes. Head tilted up. Arms in side. Sad: dark blue eyes. Upper body hangs forward. Surprised: light eyes. Upper body moves backwards. Head to side and up. Arms up and sideways.


27 icat vs Nao Emotion recognition Is emotion recognition better when it s expressed by the icat? (facial vs body posture) Does corresponding context increases the recognition rates? (context vs no context) Do recognition rates increase in a second interaction? (1e vs 2nd interaction)
28 Method Fourteen 5th graders, eight and nine year olds. Interacted: twice with Nao (context, no context) twice with icat (context, no context) Second week, same interactions, different context Context: Computer plays a story. Robot plays along and shows emotions No Context: Robot says it will show next emotion Counter-balanced

29 Results Children can recognize both icat and Nao expressions well Overall, no difference in recognition rates, but For Sad, the icat s recognitions were better For Happy, the Nao s recognitions were better Recognition rates higher in Context than in No Context. Second time, higher recognition rates than first time.
30 Design Rationale Interaction Design Patterns (how) shape Use Case (where, when, who) contextualize Requirements (what) justify Claims (why)
31 Method Does the intrinsic motivation of a child to play the Imitation and Quiz (mathematics) game increase when the robot is adaptive on performance? 20 children age 9-10 from school Het Spoor in Zeist, participated in the research, equally divided over 2 groups. Between subject design Measures Intrinsic Motivation Inventory (IMI) Interest/enjoyment and Relatedness Scale 1-7 (helemaal niet mee eens helemaal mee eens) Free-choice period (fcp) Procedure: Three sessions within two weeks Experiment (15 min) fcp (5 min) IMI (15 questions)
32 Results Free-choice period: Adaptive condition significantly higher than nonadaptive condition
33 Results Average level 20 (as was designed) Slow starters played with robot during fcp Average level 24,7 Slow starters played with robot during fcp Children converged to their level over the different sessions
 contextualize Requirements (what) justify Claims")
34 Design Rationale Interaction Design Patterns (how) shape Use Case (where, when, who) contextualize Requirements (what) justify Claims (why)
35 Validated Design Rationale Interaction Design Patterns (how) shape Use Case (where, when, who) contextualize Requirements (what) justify Claims (why)

36 Adapt state to activity and child state - within boundaries - Sense child emotion Sense child activity Express emotion Maintain user model Maintain robot model
, age 8-10 Measures: Child s and")


37 Evaluation Robot with/without adaptive expressiveness Quiz, 18 children (within subjects), age 8-10 Measures: Child s and robot s behaviour Child s perception and preferences Pleasure, acceptance, empathy, trust, emotions and preference Coding scheme for Smiles, laughter, excited bouncing, positive vocalization, frowns, shrugging and sighing, startle, and negative vocalization
38 Results Arousal of robot and child
39 Results Valence of robot and child

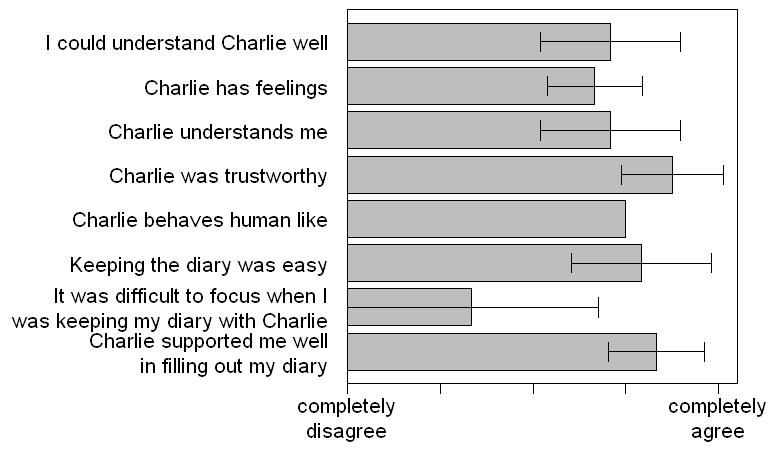
40 Results Child s expressiveness per robot adaptive robot nonadaptive robot

41 Results Child s robot preference adaptive robot nonadaptive robot
42 Results Reasons for preferences Nr. Of times given for the non-adaptive robot Understandable Emotion Nr. Of times given for the adaptive robot
43 Design Rationale Interaction Design Patterns (how) shape Use Case (where, when, who) contextualize Requirements (what) justify Claims (why)


44 But, intelligibility should be improved Downside emotion in prosody: worse intelligibility Improve intelligibility measurement and affective prosody
45 Diary Self Management Content and objectives diary scenario based on: Dutch diabetes association Medical experts from hospitals (Rotterdam and Tiel) Focus Group 3 children with diabetes Children do not (like to) use a diary They would like to provide their experiences to a robot
 and video conference Children had to fill-out the diary daily Every other day they filled out the diary with robot For two")
46 Diabetes Diary - Experiment 6 children with diabetes Robot introduction at home with laptop for diary ( and video conference Children had to fill-out the diary daily Every other day they filled out the diary with robot For two weeks

47


48 Example part of diary it was high, so my mood was bad

49 Results
50 Child With robot Without robot Mean Average amount of characters in daily activities logs
51


52 Meander

53 Questions? pitiful when he falls, he may have hurt Charlie has taught me a lot Charlie often says nice things to me Charlie and I are pretty much friends I like him
ENHANCED HUMAN-AGENT INTERACTION: AUGMENTING INTERACTION MODELS WITH EMBODIED AGENTS BY SERAFIN BENTO. MASTER OF SCIENCE in INFORMATION SYSTEMS
 BY SERAFIN BENTO MASTER OF SCIENCE in INFORMATION SYSTEMS Edmonton, Alberta September, 2015 ABSTRACT The popularity of software agents demands for more comprehensive HAI design processes. The outcome of
BY SERAFIN BENTO MASTER OF SCIENCE in INFORMATION SYSTEMS Edmonton, Alberta September, 2015 ABSTRACT The popularity of software agents demands for more comprehensive HAI design processes. The outcome of
Lecturers. Alessandro Vinciarelli
 Lecturers Alessandro Vinciarelli Alessandro Vinciarelli, lecturer at the University of Glasgow (Department of Computing Science) and senior researcher of the Idiap Research Institute (Martigny, Switzerland.
Lecturers Alessandro Vinciarelli Alessandro Vinciarelli, lecturer at the University of Glasgow (Department of Computing Science) and senior researcher of the Idiap Research Institute (Martigny, Switzerland.
Non Verbal Communication of Emotions in Social Robots
 Non Verbal Communication of Emotions in Social Robots Aryel Beck Supervisor: Prof. Nadia Thalmann BeingThere Centre, Institute for Media Innovation, Nanyang Technological University, Singapore INTRODUCTION
Non Verbal Communication of Emotions in Social Robots Aryel Beck Supervisor: Prof. Nadia Thalmann BeingThere Centre, Institute for Media Innovation, Nanyang Technological University, Singapore INTRODUCTION
Assignment 1 IN5480: interaction with AI s
 Assignment 1 IN5480: interaction with AI s Artificial Intelligence definitions 1. Artificial intelligence (AI) is an area of computer science that emphasizes the creation of intelligent machines that work
Assignment 1 IN5480: interaction with AI s Artificial Intelligence definitions 1. Artificial intelligence (AI) is an area of computer science that emphasizes the creation of intelligent machines that work
Essay on A Survey of Socially Interactive Robots Authors: Terrence Fong, Illah Nourbakhsh, Kerstin Dautenhahn Summarized by: Mehwish Alam
 1 Introduction Essay on A Survey of Socially Interactive Robots Authors: Terrence Fong, Illah Nourbakhsh, Kerstin Dautenhahn Summarized by: Mehwish Alam 1.1 Social Robots: Definition: Social robots are
1 Introduction Essay on A Survey of Socially Interactive Robots Authors: Terrence Fong, Illah Nourbakhsh, Kerstin Dautenhahn Summarized by: Mehwish Alam 1.1 Social Robots: Definition: Social robots are
INTRODUCTION to ROBOTICS
 1 INTRODUCTION to ROBOTICS Robotics is a relatively young field of modern technology that crosses traditional engineering boundaries. Understanding the complexity of robots and their applications requires
1 INTRODUCTION to ROBOTICS Robotics is a relatively young field of modern technology that crosses traditional engineering boundaries. Understanding the complexity of robots and their applications requires
Diseño y Evaluación de Sistemas Interactivos COM Affective Aspects of Interaction Design 19 de Octubre de 2010
 Diseño y Evaluación de Sistemas Interactivos COM-14112-001 Affective Aspects of Interaction Design 19 de Octubre de 2010 Dr. Víctor M. González y González victor.gonzalez@itam.mx Agenda 1. MexIHC 2010
Diseño y Evaluación de Sistemas Interactivos COM-14112-001 Affective Aspects of Interaction Design 19 de Octubre de 2010 Dr. Víctor M. González y González victor.gonzalez@itam.mx Agenda 1. MexIHC 2010
Cognitive robots and emotional intelligence Cloud robotics Ethical, legal and social issues of robotic Construction robots Human activities in many
 Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Adaptive Emotional Expression in Robot-Child Interaction
 Adaptive Emotional Expression in Robot-Child Interaction ABSTRACT Myrthe Tielman TNO / Utrecht University m.l.tielman@gmail.com John-Jules Meyer Utrecht University J.J.C.Meyer@uu.nl Expressive behaviour
Adaptive Emotional Expression in Robot-Child Interaction ABSTRACT Myrthe Tielman TNO / Utrecht University m.l.tielman@gmail.com John-Jules Meyer Utrecht University J.J.C.Meyer@uu.nl Expressive behaviour
Human Robot Dialogue Interaction. Barry Lumpkin
 Human Robot Dialogue Interaction Barry Lumpkin Robots Where to Look: A Study of Human- Robot Engagement Why embodiment? Pure vocal and virtual agents can hold a dialogue Physical robots come with many
Human Robot Dialogue Interaction Barry Lumpkin Robots Where to Look: A Study of Human- Robot Engagement Why embodiment? Pure vocal and virtual agents can hold a dialogue Physical robots come with many
Touch Perception and Emotional Appraisal for a Virtual Agent
 Touch Perception and Emotional Appraisal for a Virtual Agent Nhung Nguyen, Ipke Wachsmuth, Stefan Kopp Faculty of Technology University of Bielefeld 33594 Bielefeld Germany {nnguyen, ipke, skopp}@techfak.uni-bielefeld.de
Touch Perception and Emotional Appraisal for a Virtual Agent Nhung Nguyen, Ipke Wachsmuth, Stefan Kopp Faculty of Technology University of Bielefeld 33594 Bielefeld Germany {nnguyen, ipke, skopp}@techfak.uni-bielefeld.de
Virtual Human Research at USC s Institute for Creative Technologies
 Virtual Human Research at USC s Institute for Creative Technologies Jonathan Gratch Director of Virtual Human Research Professor of Computer Science and Psychology University of Southern California The
Virtual Human Research at USC s Institute for Creative Technologies Jonathan Gratch Director of Virtual Human Research Professor of Computer Science and Psychology University of Southern California The
Distributed Robotics: Building an environment for digital cooperation. Artificial Intelligence series
 Distributed Robotics: Building an environment for digital cooperation Artificial Intelligence series Distributed Robotics March 2018 02 From programmable machines to intelligent agents Robots, from the
Distributed Robotics: Building an environment for digital cooperation Artificial Intelligence series Distributed Robotics March 2018 02 From programmable machines to intelligent agents Robots, from the
A*STAR Unveils Singapore s First Social Robots at Robocup2010
 MEDIA RELEASE Singapore, 21 June 2010 Total: 6 pages A*STAR Unveils Singapore s First Social Robots at Robocup2010 Visit Suntec City to experience the first social robots - OLIVIA and LUCAS that can see,
MEDIA RELEASE Singapore, 21 June 2010 Total: 6 pages A*STAR Unveils Singapore s First Social Robots at Robocup2010 Visit Suntec City to experience the first social robots - OLIVIA and LUCAS that can see,
Introduction to HCI. CS4HC3 / SE4HC3/ SE6DO3 Fall Instructor: Kevin Browne
 Introduction to HCI CS4HC3 / SE4HC3/ SE6DO3 Fall 2011 Instructor: Kevin Browne brownek@mcmaster.ca Slide content is based heavily on Chapter 1 of the textbook: Designing the User Interface: Strategies
Introduction to HCI CS4HC3 / SE4HC3/ SE6DO3 Fall 2011 Instructor: Kevin Browne brownek@mcmaster.ca Slide content is based heavily on Chapter 1 of the textbook: Designing the User Interface: Strategies
An interdisciplinary collaboration of Theatre Arts and Social Robotics: The creation of empathy and embodiment in social robotics
 An interdisciplinary collaboration of Theatre Arts and Social Robotics: The creation of empathy and embodiment in social robotics Empathy: the ability to understand and share the feelings of another. Embodiment:
An interdisciplinary collaboration of Theatre Arts and Social Robotics: The creation of empathy and embodiment in social robotics Empathy: the ability to understand and share the feelings of another. Embodiment:
Meet Pepper. Because of this, Pepper will truly change the way we live our lives.
 PRESS KIT Meet Pepper Pepper is a humanoid robot, engaging, surprising and above all kind. Pepper is the first emotional robot. He was not designed for an industrial function, rather to be a true companion
PRESS KIT Meet Pepper Pepper is a humanoid robot, engaging, surprising and above all kind. Pepper is the first emotional robot. He was not designed for an industrial function, rather to be a true companion
Understanding the Mechanism of Sonzai-Kan
 Understanding the Mechanism of Sonzai-Kan ATR Intelligent Robotics and Communication Laboratories Where does the Sonzai-Kan, the feeling of one's presence, such as the atmosphere, the authority, come from?
Understanding the Mechanism of Sonzai-Kan ATR Intelligent Robotics and Communication Laboratories Where does the Sonzai-Kan, the feeling of one's presence, such as the atmosphere, the authority, come from?
CSC384 Intro to Artificial Intelligence* *The following slides are based on Fahiem Bacchus course lecture notes.
 CSC384 Intro to Artificial Intelligence* *The following slides are based on Fahiem Bacchus course lecture notes. Artificial Intelligence A branch of Computer Science. Examines how we can achieve intelligent
CSC384 Intro to Artificial Intelligence* *The following slides are based on Fahiem Bacchus course lecture notes. Artificial Intelligence A branch of Computer Science. Examines how we can achieve intelligent
On The Role of the Multi-Level and Multi- Scale Nature of Behaviour and Cognition
 On The Role of the Multi-Level and Multi- Scale Nature of Behaviour and Cognition Stefano Nolfi Laboratory of Autonomous Robotics and Artificial Life Institute of Cognitive Sciences and Technologies, CNR
On The Role of the Multi-Level and Multi- Scale Nature of Behaviour and Cognition Stefano Nolfi Laboratory of Autonomous Robotics and Artificial Life Institute of Cognitive Sciences and Technologies, CNR
Cognitive Robotics 2016/2017
 Cognitive Robotics 2016/2017 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Cognitive Robotics 2016/2017 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Robotics: Evolution, Technology and Applications
 Robotics: Evolution, Technology and Applications By: Dr. Hamid D. Taghirad Head of Control Group, and Department of Electrical Engineering K.N. Toosi University of Tech. Department of Electrical Engineering
Robotics: Evolution, Technology and Applications By: Dr. Hamid D. Taghirad Head of Control Group, and Department of Electrical Engineering K.N. Toosi University of Tech. Department of Electrical Engineering
How the Body Shapes the Way We Think
 How the Body Shapes the Way We Think A New View of Intelligence Rolf Pfeifer and Josh Bongard with a contribution by Simon Grand Foreword by Rodney Brooks Illustrations by Shun Iwasawa A Bradford Book
How the Body Shapes the Way We Think A New View of Intelligence Rolf Pfeifer and Josh Bongard with a contribution by Simon Grand Foreword by Rodney Brooks Illustrations by Shun Iwasawa A Bradford Book
Lecture 23: Robotics. Instructor: Joelle Pineau Class web page: What is a robot?
 COMP 102: Computers and Computing Lecture 23: Robotics Instructor: (jpineau@cs.mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp102 What is a robot? The word robot is popularized by the Czech playwright
COMP 102: Computers and Computing Lecture 23: Robotics Instructor: (jpineau@cs.mcgill.ca) Class web page: www.cs.mcgill.ca/~jpineau/comp102 What is a robot? The word robot is popularized by the Czech playwright
Our Aspirations Ahead
 Our Aspirations Ahead ~ Pursuing Smart Innovation ~ 1 Introduction For the past decade, under our corporate philosophy Creating a New Communication Culture, and the vision MAGIC, NTT DOCOMO Group has been
Our Aspirations Ahead ~ Pursuing Smart Innovation ~ 1 Introduction For the past decade, under our corporate philosophy Creating a New Communication Culture, and the vision MAGIC, NTT DOCOMO Group has been
Outline. Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types
 Environment types Agent types") Intelligent Agents Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types Agents An agent is anything that can be viewed as
Intelligent Agents Outline Agents and environments Rationality PEAS (Performance measure, Environment, Actuators, Sensors) Environment types Agent types Agents An agent is anything that can be viewed as
MIN-Fakultät Fachbereich Informatik. Universität Hamburg. Socially interactive robots. Christine Upadek. 29 November Christine Upadek 1
 Christine Upadek 29 November 2010 Christine Upadek 1 Outline Emotions Kismet - a sociable robot Outlook Christine Upadek 2 Denition Social robots are embodied agents that are part of a heterogeneous group:
Christine Upadek 29 November 2010 Christine Upadek 1 Outline Emotions Kismet - a sociable robot Outlook Christine Upadek 2 Denition Social robots are embodied agents that are part of a heterogeneous group:
Outline. Introduction to AI. Artificial Intelligence. What is an AI? What is an AI? Agents Environments
 Outline Introduction to AI ECE457 Applied Artificial Intelligence Fall 2007 Lecture #1 What is an AI? Russell & Norvig, chapter 1 Agents s Russell & Norvig, chapter 2 ECE457 Applied Artificial Intelligence
Outline Introduction to AI ECE457 Applied Artificial Intelligence Fall 2007 Lecture #1 What is an AI? Russell & Norvig, chapter 1 Agents s Russell & Norvig, chapter 2 ECE457 Applied Artificial Intelligence
CS494/594: Software for Intelligent Robotics
 CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
CS494/594: Software for Intelligent Robotics Spring 2007 Tuesday/Thursday 11:10 12:25 Instructor: Dr. Lynne E. Parker TA: Rasko Pjesivac Outline Overview syllabus and class policies Introduction to class:
Detecting perceived quality of interaction with a robot using contextual features. Ginevra Castellano, Iolanda Leite & Ana Paiva.
 Detecting perceived quality of interaction with a robot using contextual features Ginevra Castellano, Iolanda Leite & Ana Paiva Autonomous Robots ISSN 0929-5593 DOI 10.1007/s10514-016-9592-y 1 23 Your
Detecting perceived quality of interaction with a robot using contextual features Ginevra Castellano, Iolanda Leite & Ana Paiva Autonomous Robots ISSN 0929-5593 DOI 10.1007/s10514-016-9592-y 1 23 Your
STRATEGO EXPERT SYSTEM SHELL
 STRATEGO EXPERT SYSTEM SHELL Casper Treijtel and Leon Rothkrantz Faculty of Information Technology and Systems Delft University of Technology Mekelweg 4 2628 CD Delft University of Technology E-mail: L.J.M.Rothkrantz@cs.tudelft.nl
STRATEGO EXPERT SYSTEM SHELL Casper Treijtel and Leon Rothkrantz Faculty of Information Technology and Systems Delft University of Technology Mekelweg 4 2628 CD Delft University of Technology E-mail: L.J.M.Rothkrantz@cs.tudelft.nl
Appendices master s degree programme Artificial Intelligence
 Appendices master s degree programme Artificial Intelligence 2015-2016 Appendix I Teaching outcomes of the degree programme (art. 1.3) 1. The master demonstrates knowledge, understanding and the ability
Appendices master s degree programme Artificial Intelligence 2015-2016 Appendix I Teaching outcomes of the degree programme (art. 1.3) 1. The master demonstrates knowledge, understanding and the ability
What is Artificial Intelligence? Alternate Definitions (Russell + Norvig) Human intelligence
 Human intelligence") CSE 3401: Intro to Artificial Intelligence & Logic Programming Introduction Required Readings: Russell & Norvig Chapters 1 & 2. Lecture slides adapted from those of Fahiem Bacchus. What is AI? What is
CSE 3401: Intro to Artificial Intelligence & Logic Programming Introduction Required Readings: Russell & Norvig Chapters 1 & 2. Lecture slides adapted from those of Fahiem Bacchus. What is AI? What is
Appendices master s degree programme Human Machine Communication
 Appendices master s degree programme Human Machine Communication 2015-2016 Appendix I Teaching outcomes of the degree programme (art. 1.3) 1. The master demonstrates knowledge, understanding and the ability
Appendices master s degree programme Human Machine Communication 2015-2016 Appendix I Teaching outcomes of the degree programme (art. 1.3) 1. The master demonstrates knowledge, understanding and the ability
HUMAN-ROBOT COLLABORATION TNO, THE NETHERLANDS. 6 th SAF RA Symposium Sustainable Safety 2030 June 14, 2018 Mr. Johan van Middelaar
 HUMAN-ROBOT COLLABORATION TNO, THE NETHERLANDS 6 th SAF RA Symposium Sustainable Safety 2030 June 14, 2018 Mr. Johan van Middelaar CONTENTS TNO & Robotics Robots and workplace safety: Human-Robot Collaboration,
HUMAN-ROBOT COLLABORATION TNO, THE NETHERLANDS 6 th SAF RA Symposium Sustainable Safety 2030 June 14, 2018 Mr. Johan van Middelaar CONTENTS TNO & Robotics Robots and workplace safety: Human-Robot Collaboration,
European Robotics Research: Achievements and challenges
 European Robotics Research: Achievements and challenges Libor Král, Head of Unit, CONNECT A2 Robotics European Commission IROS 2012 Vila Moura, Algarve, Portugal 9 October 2012 European robotics research
European Robotics Research: Achievements and challenges Libor Král, Head of Unit, CONNECT A2 Robotics European Commission IROS 2012 Vila Moura, Algarve, Portugal 9 October 2012 European robotics research
Self-Affirmations to Strengthen Health Management
 Self-Affirmations to Strengthen Health Management Going for the 3 Increases: Increase in Health, Increase in Happiness & Increase in Energy Strategies for Success in Health Management By: James J. Messina,
Self-Affirmations to Strengthen Health Management Going for the 3 Increases: Increase in Health, Increase in Happiness & Increase in Energy Strategies for Success in Health Management By: James J. Messina,
Humanoid Robots. by Julie Chambon
 Humanoid Robots by Julie Chambon 25th November 2008 Outlook Introduction Why a humanoid appearance? Particularities of humanoid Robots Utility of humanoid Robots Complexity of humanoids Humanoid projects
Humanoid Robots by Julie Chambon 25th November 2008 Outlook Introduction Why a humanoid appearance? Particularities of humanoid Robots Utility of humanoid Robots Complexity of humanoids Humanoid projects
Natural Interaction with Social Robots
 Workshop: Natural Interaction with Social Robots Part of the Topig Group with the same name. http://homepages.stca.herts.ac.uk/~comqkd/tg-naturalinteractionwithsocialrobots.html organized by Kerstin Dautenhahn,
Workshop: Natural Interaction with Social Robots Part of the Topig Group with the same name. http://homepages.stca.herts.ac.uk/~comqkd/tg-naturalinteractionwithsocialrobots.html organized by Kerstin Dautenhahn,
Towards Intuitive Industrial Human-Robot Collaboration
 Towards Intuitive Industrial Human-Robot Collaboration System Design and Future Directions Ferdinand Fuhrmann, Wolfgang Weiß, Lucas Paletta, Bernhard Reiterer, Andreas Schlotzhauer, Mathias Brandstötter
Towards Intuitive Industrial Human-Robot Collaboration System Design and Future Directions Ferdinand Fuhrmann, Wolfgang Weiß, Lucas Paletta, Bernhard Reiterer, Andreas Schlotzhauer, Mathias Brandstötter
One computer theorist s view of cognitive systems
 One computer theorist s view of cognitive systems Jiri Wiedermann Institute of Computer Science, Prague Academy of Sciences of the Czech Republic Partially supported by grant 1ET100300419 Outline 1. The
One computer theorist s view of cognitive systems Jiri Wiedermann Institute of Computer Science, Prague Academy of Sciences of the Czech Republic Partially supported by grant 1ET100300419 Outline 1. The
FP7 ICT Call 6: Cognitive Systems and Robotics
 FP7 ICT Call 6: Cognitive Systems and Robotics Information day Luxembourg, January 14, 2010 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media
FP7 ICT Call 6: Cognitive Systems and Robotics Information day Luxembourg, January 14, 2010 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media
The Use of Social Robot Ono in Robot Assisted Therapy
 The Use of Social Robot Ono in Robot Assisted Therapy Cesar Vandevelde 1, Jelle Saldien 1, Maria-Cristina Ciocci 1, Bram Vanderborght 2 1 Ghent University, Dept. of Industrial Systems and Product Design,
The Use of Social Robot Ono in Robot Assisted Therapy Cesar Vandevelde 1, Jelle Saldien 1, Maria-Cristina Ciocci 1, Bram Vanderborght 2 1 Ghent University, Dept. of Industrial Systems and Product Design,
INTERACTIONS WITH ROBOTS:
 INTERACTIONS WITH ROBOTS: THE TRUTH WE REVEAL ABOUT OURSELVES Annual Review of Psychology Vol. 68:627-652 (Volume publication date January 2017) First published online as a Review in Advance on September
INTERACTIONS WITH ROBOTS: THE TRUTH WE REVEAL ABOUT OURSELVES Annual Review of Psychology Vol. 68:627-652 (Volume publication date January 2017) First published online as a Review in Advance on September
EMERGENCE OF COMMUNICATION IN TEAMS OF EMBODIED AND SITUATED AGENTS
 EMERGENCE OF COMMUNICATION IN TEAMS OF EMBODIED AND SITUATED AGENTS DAVIDE MAROCCO STEFANO NOLFI Institute of Cognitive Science and Technologies, CNR, Via San Martino della Battaglia 44, Rome, 00185, Italy
EMERGENCE OF COMMUNICATION IN TEAMS OF EMBODIED AND SITUATED AGENTS DAVIDE MAROCCO STEFANO NOLFI Institute of Cognitive Science and Technologies, CNR, Via San Martino della Battaglia 44, Rome, 00185, Italy
Cognitive Robotics 2017/2018
 Cognitive Robotics 2017/2018 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Cognitive Robotics 2017/2018 Course Introduction Matteo Matteucci matteo.matteucci@polimi.it Artificial Intelligence and Robotics Lab - Politecnico di Milano About me and my lectures Lectures given by
Front Digital page Strategy and Leadership
 Front Digital page Strategy and Leadership Who am I? Prof. Dr. Bob de Wit What concerns me? - How to best lead a firm - How to design the strategy process - How to best govern a country - How to adapt
Front Digital page Strategy and Leadership Who am I? Prof. Dr. Bob de Wit What concerns me? - How to best lead a firm - How to design the strategy process - How to best govern a country - How to adapt
Welcome to CSC384: Intro to Artificial MAN.
 Welcome to CSC384: Intro to Artificial Intelligence!@#!, MAN. CSC384: Intro to Artificial Intelligence Winter 2014 Instructor: Prof. Sheila McIlraith Lectures/Tutorials: Monday 1-2pm WB 116 Wednesday 1-2pm
Welcome to CSC384: Intro to Artificial Intelligence!@#!, MAN. CSC384: Intro to Artificial Intelligence Winter 2014 Instructor: Prof. Sheila McIlraith Lectures/Tutorials: Monday 1-2pm WB 116 Wednesday 1-2pm
The Essential Eight technologies Robotics
 The Essential Eight technologies Robotics Robotics are changing the way companies do business. What should boards know? Companies across all industries are using, investing in or planning to invest in
The Essential Eight technologies Robotics Robotics are changing the way companies do business. What should boards know? Companies across all industries are using, investing in or planning to invest in
Richard Voyles Professor of Robotics School of Engineering Technology
 Richard Voyles Professor of Robotics School of Engineering Technology Unprecedented Optimism in Robotics & IOT! Education (all levels) Laypublic Government Leaders (jobs, innovation) Industry (buyers and
Richard Voyles Professor of Robotics School of Engineering Technology Unprecedented Optimism in Robotics & IOT! Education (all levels) Laypublic Government Leaders (jobs, innovation) Industry (buyers and
Robotics and Autonomous Systems
 1 / 41 Robotics and Autonomous Systems Lecture 1: Introduction Simon Parsons Department of Computer Science University of Liverpool 2 / 41 Acknowledgements The robotics slides are heavily based on those
1 / 41 Robotics and Autonomous Systems Lecture 1: Introduction Simon Parsons Department of Computer Science University of Liverpool 2 / 41 Acknowledgements The robotics slides are heavily based on those
Disrupting our way to a Very Human City
 Disrupting our way to a Very Human City Zagreb Forum 2017 Technology Park Zagreb 20 th November 2017 Steve Wells COO, Fast Future Publishing steve@fastfuturepublishing.com Image: http://www.bbc.com Through
Disrupting our way to a Very Human City Zagreb Forum 2017 Technology Park Zagreb 20 th November 2017 Steve Wells COO, Fast Future Publishing steve@fastfuturepublishing.com Image: http://www.bbc.com Through
Scholarly Article Review. The Potential of Using Virtual Reality Technology in Physical Activity Settings. Aaron Krieger.
 Scholarly Article Review The Potential of Using Virtual Reality Technology in Physical Activity Settings Aaron Krieger October 22, 2015 The Potential of Using Virtual Reality Technology in Physical Activity
Scholarly Article Review The Potential of Using Virtual Reality Technology in Physical Activity Settings Aaron Krieger October 22, 2015 The Potential of Using Virtual Reality Technology in Physical Activity
How would you describe your current levels of self-care?
 Use this worksheet to assess your self-care. Answer the questions below and give as much detail as possible to really understand what s making you feel stressed, to know what you re making a priority and
Use this worksheet to assess your self-care. Answer the questions below and give as much detail as possible to really understand what s making you feel stressed, to know what you re making a priority and
Agent-Based Systems. Agent-Based Systems. Agent-Based Systems. Five pervasive trends in computing history. Agent-Based Systems. Agent-Based Systems
 Five pervasive trends in computing history Michael Rovatsos mrovatso@inf.ed.ac.uk Lecture 1 Introduction Ubiquity Cost of processing power decreases dramatically (e.g. Moore s Law), computers used everywhere
Five pervasive trends in computing history Michael Rovatsos mrovatso@inf.ed.ac.uk Lecture 1 Introduction Ubiquity Cost of processing power decreases dramatically (e.g. Moore s Law), computers used everywhere
Overview Agents, environments, typical components
 Overview Agents, environments, typical components CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami January 23, 2017 Outline 1 Autonomous robots 2 Agents
Overview Agents, environments, typical components CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami January 23, 2017 Outline 1 Autonomous robots 2 Agents
A SURVEY OF SOCIALLY INTERACTIVE ROBOTS
 A SURVEY OF SOCIALLY INTERACTIVE ROBOTS Terrence Fong, Illah Nourbakhsh, Kerstin Dautenhahn Presented By: Mehwish Alam INTRODUCTION History of Social Robots Social Robots Socially Interactive Robots Why
A SURVEY OF SOCIALLY INTERACTIVE ROBOTS Terrence Fong, Illah Nourbakhsh, Kerstin Dautenhahn Presented By: Mehwish Alam INTRODUCTION History of Social Robots Social Robots Socially Interactive Robots Why
Human-Computer Interaction
 Human-Computer Interaction Prof. Antonella De Angeli, PhD Antonella.deangeli@disi.unitn.it Ground rules To keep disturbance to your fellow students to a minimum Switch off your mobile phone during the
Human-Computer Interaction Prof. Antonella De Angeli, PhD Antonella.deangeli@disi.unitn.it Ground rules To keep disturbance to your fellow students to a minimum Switch off your mobile phone during the
How would you describe your current levels of self-care?
 Use this worksheet to assess your self-care. Answer the questions below and give as much detail as possible to really understand what s making you feel stressed, to know what you re making a priority and
Use this worksheet to assess your self-care. Answer the questions below and give as much detail as possible to really understand what s making you feel stressed, to know what you re making a priority and
Augmented Home. Integrating a Virtual World Game in a Physical Environment. Serge Offermans and Jun Hu
 Augmented Home Integrating a Virtual World Game in a Physical Environment Serge Offermans and Jun Hu Eindhoven University of Technology Department of Industrial Design The Netherlands {s.a.m.offermans,j.hu}@tue.nl
Augmented Home Integrating a Virtual World Game in a Physical Environment Serge Offermans and Jun Hu Eindhoven University of Technology Department of Industrial Design The Netherlands {s.a.m.offermans,j.hu}@tue.nl
Interaction Design -ID. Unit 6
 Interaction Design -ID Unit 6 Learning outcomes Understand what ID is Understand and apply PACT analysis Understand the basic step of the user-centred design 2012-2013 Human-Computer Interaction 2 What
Interaction Design -ID Unit 6 Learning outcomes Understand what ID is Understand and apply PACT analysis Understand the basic step of the user-centred design 2012-2013 Human-Computer Interaction 2 What
Why interest in visual perception?
 Raffaella Folgieri Digital Information & Communication Departiment Constancy factors in visual perception 26/11/2010, Gjovik, Norway Why interest in visual perception? to investigate main factors in VR
Raffaella Folgieri Digital Information & Communication Departiment Constancy factors in visual perception 26/11/2010, Gjovik, Norway Why interest in visual perception? to investigate main factors in VR
Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur
 Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture - 01 Introduction to Robot and Robotics Let us start with the course on Robotics.
Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture - 01 Introduction to Robot and Robotics Let us start with the course on Robotics.
HUMAN-ROBOT INTERACTION
 HUMAN-ROBOT INTERACTION (NO NATURAL LANGUAGE) 5. EMOTION EXPRESSION ANDREA BONARINI ARTIFICIAL INTELLIGENCE A ND ROBOTICS LAB D I P A R T M E N T O D I E L E T T R O N I C A, I N F O R M A Z I O N E E
HUMAN-ROBOT INTERACTION (NO NATURAL LANGUAGE) 5. EMOTION EXPRESSION ANDREA BONARINI ARTIFICIAL INTELLIGENCE A ND ROBOTICS LAB D I P A R T M E N T O D I E L E T T R O N I C A, I N F O R M A Z I O N E E
TEST PROJECT MOBILE ROBOTICS FOR JUNIOR
 TEST PROJECT MOBILE ROBOTICS FOR JUNIOR CONTENTS This Test Project proposal consists of the following documentation/files: 1. DESCRIPTION OF PROJECT AND TASKS DOCUMENTATION The JUNIOR challenge of Mobile
TEST PROJECT MOBILE ROBOTICS FOR JUNIOR CONTENTS This Test Project proposal consists of the following documentation/files: 1. DESCRIPTION OF PROJECT AND TASKS DOCUMENTATION The JUNIOR challenge of Mobile
SECOND YEAR PROJECT SUMMARY
 SECOND YEAR PROJECT SUMMARY Grant Agreement number: 215805 Project acronym: Project title: CHRIS Cooperative Human Robot Interaction Systems Period covered: from 01 March 2009 to 28 Feb 2010 Contact Details
SECOND YEAR PROJECT SUMMARY Grant Agreement number: 215805 Project acronym: Project title: CHRIS Cooperative Human Robot Interaction Systems Period covered: from 01 March 2009 to 28 Feb 2010 Contact Details
INTANGIBLES Big-League Stories and Strategies for Winning the Mental Game in Baseball and in Life
 INTANGIBLES Big-League Stories and Strategies for Winning the Mental Game in Baseball and in Life These Character Development Inventory forms are meant as a supplement to your book purchase. It was important
INTANGIBLES Big-League Stories and Strategies for Winning the Mental Game in Baseball and in Life These Character Development Inventory forms are meant as a supplement to your book purchase. It was important
Master Artificial Intelligence
 Master Artificial Intelligence Appendix I Teaching outcomes of the degree programme (art. 1.3) 1. The master demonstrates knowledge, understanding and the ability to evaluate, analyze and interpret relevant
Master Artificial Intelligence Appendix I Teaching outcomes of the degree programme (art. 1.3) 1. The master demonstrates knowledge, understanding and the ability to evaluate, analyze and interpret relevant
Benchmarking Intelligent Service Robots through Scientific Competitions: the approach. Luca Iocchi. Sapienza University of Rome, Italy
 Benchmarking Intelligent Service Robots through Scientific Competitions: the RoboCup@Home approach Luca Iocchi Sapienza University of Rome, Italy Motivation Benchmarking Domestic Service Robots Complex
Benchmarking Intelligent Service Robots through Scientific Competitions: the RoboCup@Home approach Luca Iocchi Sapienza University of Rome, Italy Motivation Benchmarking Domestic Service Robots Complex
More Thinking Matters Too Understanding My Life Patterns
 Self Assessment From time to time I answer the questions below. I don t think long before I answer each one. I try to be quick and honest with myself. I think about the people I interact with the most
Self Assessment From time to time I answer the questions below. I don t think long before I answer each one. I try to be quick and honest with myself. I think about the people I interact with the most
Contents. Mental Commit Robot (Mental Calming Robot) Industrial Robots. In What Way are These Robots Intelligent. Video: Mental Commit Robots
 Industrial Robots. In What Way are These Robots Intelligent. Video: Mental Commit Robots") Human Robot Interaction for Psychological Enrichment Dr. Takanori Shibata Senior Research Scientist Intelligent Systems Institute National Institute of Advanced Industrial Science and Technology (AIST)
Human Robot Interaction for Psychological Enrichment Dr. Takanori Shibata Senior Research Scientist Intelligent Systems Institute National Institute of Advanced Industrial Science and Technology (AIST)
Front Digital page Strategy and leadership
 Front Digital page Strategy and leadership Who am I? Prof. Dr. Bob de Wit What concerns me? - How to best lead a firm - How to design the strategy process - How to best govern a country - How to adapt
Front Digital page Strategy and leadership Who am I? Prof. Dr. Bob de Wit What concerns me? - How to best lead a firm - How to design the strategy process - How to best govern a country - How to adapt
Chess as a cognitive training ground. Six years of trials in primary schools.
 Chess as a cognitive training ground. Six years of trials in primary schools. By Roberto Trinchero 1. Chess in schools to improve intelligence Does playing chess improve the cognitive abilities of children?
Chess as a cognitive training ground. Six years of trials in primary schools. By Roberto Trinchero 1. Chess in schools to improve intelligence Does playing chess improve the cognitive abilities of children?
Neuro-Fuzzy and Soft Computing: Fuzzy Sets. Chapter 1 of Neuro-Fuzzy and Soft Computing by Jang, Sun and Mizutani
 Chapter 1 of Neuro-Fuzzy and Soft Computing by Jang, Sun and Mizutani Outline Introduction Soft Computing (SC) vs. Conventional Artificial Intelligence (AI) Neuro-Fuzzy (NF) and SC Characteristics 2 Introduction
Chapter 1 of Neuro-Fuzzy and Soft Computing by Jang, Sun and Mizutani Outline Introduction Soft Computing (SC) vs. Conventional Artificial Intelligence (AI) Neuro-Fuzzy (NF) and SC Characteristics 2 Introduction
Humanoid Robots: A New Kind of Tool
 Humanoid Robots: A New Kind of Tool Bryan Adams, Cynthia Breazeal, Rodney Brooks, Brian Scassellati MIT Artificial Intelligence Laboratory 545 Technology Square Cambridge, MA 02139 USA {bpadams, cynthia,
Humanoid Robots: A New Kind of Tool Bryan Adams, Cynthia Breazeal, Rodney Brooks, Brian Scassellati MIT Artificial Intelligence Laboratory 545 Technology Square Cambridge, MA 02139 USA {bpadams, cynthia,
Artificial Intelligence: An overview
 Artificial Intelligence: An overview Thomas Trappenberg January 4, 2009 Based on the slides provided by Russell and Norvig, Chapter 1 & 2 What is AI? Systems that think like humans Systems that act like
Artificial Intelligence: An overview Thomas Trappenberg January 4, 2009 Based on the slides provided by Russell and Norvig, Chapter 1 & 2 What is AI? Systems that think like humans Systems that act like
SIGVerse - A Simulation Platform for Human-Robot Interaction Jeffrey Too Chuan TAN and Tetsunari INAMURA National Institute of Informatics, Japan The
 SIGVerse - A Simulation Platform for Human-Robot Interaction Jeffrey Too Chuan TAN and Tetsunari INAMURA National Institute of Informatics, Japan The 29 th Annual Conference of The Robotics Society of
SIGVerse - A Simulation Platform for Human-Robot Interaction Jeffrey Too Chuan TAN and Tetsunari INAMURA National Institute of Informatics, Japan The 29 th Annual Conference of The Robotics Society of
Human Robot Interaction (HRI)
") Brief Introduction to HRI Batu Akan batu.akan@mdh.se Mälardalen Högskola September 29, 2008 Overview 1 Introduction What are robots What is HRI Application areas of HRI 2 3 Motivations Proposed Solution
Brief Introduction to HRI Batu Akan batu.akan@mdh.se Mälardalen Högskola September 29, 2008 Overview 1 Introduction What are robots What is HRI Application areas of HRI 2 3 Motivations Proposed Solution
Trust and Interaction in Industrial Human-Robot Collaborative applications
 Trust and Interaction in Industrial Human-Robot Collaborative applications Iñaki Maurtua IK4-TEKNIKER This project has received funding from the European Union s Horizon 2020 research and innovation programme
Trust and Interaction in Industrial Human-Robot Collaborative applications Iñaki Maurtua IK4-TEKNIKER This project has received funding from the European Union s Horizon 2020 research and innovation programme
When in Rome: The Role of Culture & Context in Adherence to Robot Recommendations
 When in Rome: The Role of Culture & Context in Adherence to Robot Recommendations Lin Wang & Pei- Luen (Patrick) Rau Benjamin Robinson & Pamela Hinds Vanessa Evers Funded by grants from the Specialized
When in Rome: The Role of Culture & Context in Adherence to Robot Recommendations Lin Wang & Pei- Luen (Patrick) Rau Benjamin Robinson & Pamela Hinds Vanessa Evers Funded by grants from the Specialized
Expressive behaviour in robot-child interaction
 Universiteit Utrecht TNO Master Thesis Expressive behaviour in robot-child interaction Author: Myrthe Tielman 3345343 Supervisors UU: Prof. Dr. John-Jules Meyer Prof. Dr. Michael Moortgat Supervisors TNO:
Universiteit Utrecht TNO Master Thesis Expressive behaviour in robot-child interaction Author: Myrthe Tielman 3345343 Supervisors UU: Prof. Dr. John-Jules Meyer Prof. Dr. Michael Moortgat Supervisors TNO:
Last Time: Acting Humanly: The Full Turing Test
 Last Time: Acting Humanly: The Full Turing Test Alan Turing's 1950 article Computing Machinery and Intelligence discussed conditions for considering a machine to be intelligent Can machines think? Can
Last Time: Acting Humanly: The Full Turing Test Alan Turing's 1950 article Computing Machinery and Intelligence discussed conditions for considering a machine to be intelligent Can machines think? Can
Virtual General Game Playing Agent
 Virtual General Game Playing Agent Hafdís Erla Helgadóttir, Svanhvít Jónsdóttir, Andri Már Sigurdsson, Stephan Schiffel, and Hannes Högni Vilhjálmsson Center for Analysis and Design of Intelligent Agents,
Virtual General Game Playing Agent Hafdís Erla Helgadóttir, Svanhvít Jónsdóttir, Andri Már Sigurdsson, Stephan Schiffel, and Hannes Högni Vilhjálmsson Center for Analysis and Design of Intelligent Agents,
How do you teach AI the value of trust?
 How do you teach AI the value of trust? AI is different from traditional IT systems and brings with it a new set of opportunities and risks. To build trust in AI organizations will need to go beyond monitoring
How do you teach AI the value of trust? AI is different from traditional IT systems and brings with it a new set of opportunities and risks. To build trust in AI organizations will need to go beyond monitoring
Assess how research on the construction of cognitive functions in robotic systems is undertaken in Japan, China, and Korea
 Sponsor: Assess how research on the construction of cognitive functions in robotic systems is undertaken in Japan, China, and Korea Understand the relationship between robotics and the human-centered sciences
Sponsor: Assess how research on the construction of cognitive functions in robotic systems is undertaken in Japan, China, and Korea Understand the relationship between robotics and the human-centered sciences
Major Project SSAD. Mentor : Raghudeep SSAD Mentor :Manish Jha Group : Group20 Members : Harshit Daga ( ) Aman Saxena ( )
 Aman Saxena ( )") Major Project SSAD Advisor : Dr. Kamalakar Karlapalem Mentor : Raghudeep SSAD Mentor :Manish Jha Group : Group20 Members : Harshit Daga (200801028) Aman Saxena (200801010) We were supposed to calculate
Major Project SSAD Advisor : Dr. Kamalakar Karlapalem Mentor : Raghudeep SSAD Mentor :Manish Jha Group : Group20 Members : Harshit Daga (200801028) Aman Saxena (200801010) We were supposed to calculate
1. Introduction Conversational Informatics
 Conversational Informatics (E), October 5, 2016 1. Introduction Conversational Informatics Toyoaki Nishida Kyoto University Copyright 2016, Toyoaki Nishida, Atsushi Nakazawa, Yoshimasa Ohmoto, Yasser Mohammad,
Conversational Informatics (E), October 5, 2016 1. Introduction Conversational Informatics Toyoaki Nishida Kyoto University Copyright 2016, Toyoaki Nishida, Atsushi Nakazawa, Yoshimasa Ohmoto, Yasser Mohammad,
CORC 3303 Exploring Robotics. Why Teams?
 Exploring Robotics Lecture F Robot Teams Topics: 1) Teamwork and Its Challenges 2) Coordination, Communication and Control 3) RoboCup Why Teams? It takes two (or more) Such as cooperative transportation:
Exploring Robotics Lecture F Robot Teams Topics: 1) Teamwork and Its Challenges 2) Coordination, Communication and Control 3) RoboCup Why Teams? It takes two (or more) Such as cooperative transportation:
Fib or Fact: A Game of Feelings Stories
 Fib or Fact: A Game of Feelings Stories INTRODUCTION Fib or Fact is a humorous and revealing card game used to build rapport and develop emotional competence. Fib or Fact helps counselors gain additional
Fib or Fact: A Game of Feelings Stories INTRODUCTION Fib or Fact is a humorous and revealing card game used to build rapport and develop emotional competence. Fib or Fact helps counselors gain additional
CS148 - Building Intelligent Robots Lecture 2: Robotics Introduction and Philosophy. Instructor: Chad Jenkins (cjenkins)
") Lecture 2 Robot Philosophy Slide 1 CS148 - Building Intelligent Robots Lecture 2: Robotics Introduction and Philosophy Instructor: Chad Jenkins (cjenkins) Lecture 2 Robot Philosophy Slide 2 What is robotics?
Lecture 2 Robot Philosophy Slide 1 CS148 - Building Intelligent Robots Lecture 2: Robotics Introduction and Philosophy Instructor: Chad Jenkins (cjenkins) Lecture 2 Robot Philosophy Slide 2 What is robotics?
FU-Fighters. The Soccer Robots of Freie Universität Berlin. Why RoboCup? What is RoboCup?
 The Soccer Robots of Freie Universität Berlin We have been building autonomous mobile robots since 1998. Our team, composed of students and researchers from the Mathematics and Computer Science Department,
The Soccer Robots of Freie Universität Berlin We have been building autonomous mobile robots since 1998. Our team, composed of students and researchers from the Mathematics and Computer Science Department,
After the Fact Inventing the Future TRANSCRIPT. Originally aired May 24, Total runtime: 00:13:15
 After the Fact Inventing the Future Originally aired May 24, 2017 Total runtime: 00:13:15 TRANSCRIPT Brian David Johnson, futurist-in-residence, Arizona State University: The future is built every day
After the Fact Inventing the Future Originally aired May 24, 2017 Total runtime: 00:13:15 TRANSCRIPT Brian David Johnson, futurist-in-residence, Arizona State University: The future is built every day
Proceedings of th IEEE-RAS International Conference on Humanoid Robots ! # Adaptive Systems Research Group, School of Computer Science
 Proceedings of 2005 5th IEEE-RAS International Conference on Humanoid Robots! # Adaptive Systems Research Group, School of Computer Science Abstract - A relatively unexplored question for human-robot social
Proceedings of 2005 5th IEEE-RAS International Conference on Humanoid Robots! # Adaptive Systems Research Group, School of Computer Science Abstract - A relatively unexplored question for human-robot social
Agents for Serious gaming: Challenges and Opportunities
 Agents for Serious gaming: Challenges and Opportunities Frank Dignum Utrecht University Contents Agents for games? Connecting agent technology and game technology Challenges Infrastructural stance Conceptual
Agents for Serious gaming: Challenges and Opportunities Frank Dignum Utrecht University Contents Agents for games? Connecting agent technology and game technology Challenges Infrastructural stance Conceptual
ROBOTICS. Museum Classroom Programs. Pre- and Postvisit Activities. Grades 4 8. courtesy NASA/ JPL LL-050
 ROBOTICS Museum Classroom Programs Pre- and Postvisit Activities LL-050 INFORMATION & ACTIVITIES: Robotics We re Glad You re Coming! Thank you for selecting this Museum Classroom Programs class at the
ROBOTICS Museum Classroom Programs Pre- and Postvisit Activities LL-050 INFORMATION & ACTIVITIES: Robotics We re Glad You re Coming! Thank you for selecting this Museum Classroom Programs class at the
Intelligent Robotic Systems. What is a Robot? Is This a Robot? Prof. Richard Voyles Department of Computer Engineering University of Denver
 Intelligent Robotic Systems Prof. Richard Voyles Department of Computer Engineering University of Denver ENCE 3830/4800 What is a Robot? WWWebsters: a mechanism guided by automatic controls a device that
Intelligent Robotic Systems Prof. Richard Voyles Department of Computer Engineering University of Denver ENCE 3830/4800 What is a Robot? WWWebsters: a mechanism guided by automatic controls a device that
Sample Pages. Classroom Activities for the Busy Teacher: NXT. 2 nd Edition. Classroom Activities for the Busy Teacher: NXT -
 Classroom Activities for the Busy Teacher: NXT 2 nd Edition Table of Contents Chapter 1: Introduction... 1 Chapter 2: What is a robot?... 5 Chapter 3: Flowcharting... 11 Chapter 4: DomaBot Basics... 15
Classroom Activities for the Busy Teacher: NXT 2 nd Edition Table of Contents Chapter 1: Introduction... 1 Chapter 2: What is a robot?... 5 Chapter 3: Flowcharting... 11 Chapter 4: DomaBot Basics... 15
CS 730/830: Intro AI. Prof. Wheeler Ruml. TA Bence Cserna. Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1
 CS 730/830: Intro AI Prof. Wheeler Ruml TA Bence Cserna Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1 Wheeler Ruml (UNH) Lecture 1, CS 730 1 / 23 My Definition
CS 730/830: Intro AI Prof. Wheeler Ruml TA Bence Cserna Thinking inside the box. 5 handouts: course info, project info, schedule, slides, asst 1 Wheeler Ruml (UNH) Lecture 1, CS 730 1 / 23 My Definition
Developing Frogger Player Intelligence Using NEAT and a Score Driven Fitness Function
 Developing Frogger Player Intelligence Using NEAT and a Score Driven Fitness Function Davis Ancona and Jake Weiner Abstract In this report, we examine the plausibility of implementing a NEAT-based solution
Developing Frogger Player Intelligence Using NEAT and a Score Driven Fitness Function Davis Ancona and Jake Weiner Abstract In this report, we examine the plausibility of implementing a NEAT-based solution
Eleonora Escalante, MBA - MEng Strategic Corporate Advisory Services Creating Corporate Integral Value (CIV)
") Eleonora Escalante, MBA - MEng Strategic Corporate Advisory Services Creating Corporate Integral Value (CIV) Leg 7. Trends in Competitive Advantage. 21 March 2018 Drawing Source: Edx, Delft University.
Eleonora Escalante, MBA - MEng Strategic Corporate Advisory Services Creating Corporate Integral Value (CIV) Leg 7. Trends in Competitive Advantage. 21 March 2018 Drawing Source: Edx, Delft University.