On The Role of the Multi-Level and Multi- Scale Nature of Behaviour and Cognition
|
|
|
- Esmond Hill
- 5 years ago
- Views:
Transcription



1 On The Role of the Multi-Level and Multi- Scale Nature of Behaviour and Cognition Stefano Nolfi Laboratory of Autonomous Robotics and Artificial Life Institute of Cognitive Sciences and Technologies, CNR Roma, Italy
2 Behavior and cognition are dynamical process with a multi-level and multi-scale organization Environment
3 Outline! How the behaviour of adaptive robots typically have a multi-level and multi-scale organization 1. How the interaction between lower-level behaviours enable generalizations at the level of behaviour 2. How existing behavioural skills can establish the conditions for the development of new higher-levels skill 3. How the multi-level and multi-scale organization of behaviour enable compositionality and behaviour generalization
4 1. How the interaction between lower-level behaviours enable behaviour generalizations Environment


5 Evolving coordinated locomotion in self-assembled Swarm-Bots ]!!!Denebourg, Dorigo, Floreano, Gambardella, Mondada, Nolfi, [Baldassarre, Trianni, Bonani, Mondada, Dorigo, Nolfi, 2006 ]!

 The shape of the")
 Collective")
 Dynamical shape re-arrangement")
6 Experimental Scenario & Emergent Behaviours motors traction sensor light sensors bias Robots generalize with respect to: 1) The number of assembled robots 2) The shape of the swarm-bot 3) The type of links Display additional al capabilities: 1) Collective obstacle avoidance 2) Collective object-pushing pulling 3) Dynamical shape re-arrangement [Baldassarre, Parisi, Nolfi 2004 ]!
7 The multi-level structure of the displayed by the robots collective navigation coordinate motion exploration coordinated obstacle avoidance phototaxis conformistic obstacle avoidance move forward coordinate light approaching dynamical shape re-arrangement [Nolfi, in press ]!
8 2. How the development of al skills establish the conditions for the development of new higher-levels skills! Environment


9 Evolution of al and communication skills in groups of cooperating robots! wheels infrared ground speaker vision microphone Fitness Function: The group is reward with 1 point every time the robots are concurrently located in the two areas for the first time or after a switch De Greef & Nolfi, 2010

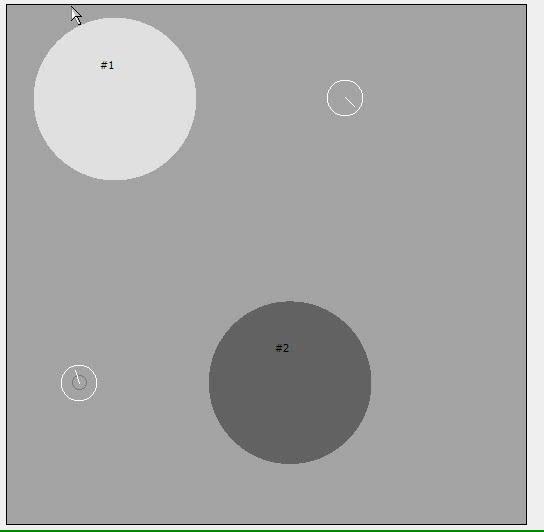
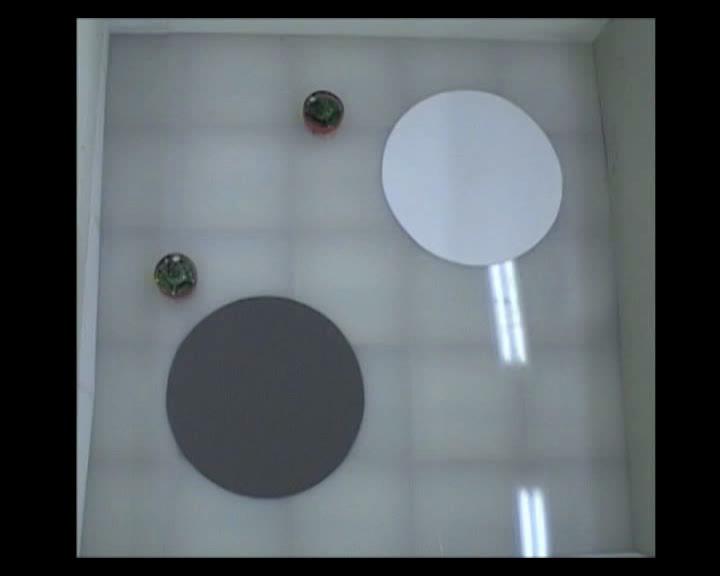

10 De Greef & Nolfi, 2010
11 Summary of the main evolutionary progresses! navigate-to-white look-robot-and-follow-border navigate-to-black exit-from-white-area toward exit-from-white-area the other robot exit-from-black-area remain-on-white-area signal A/B remain-on-black-area find-areas obstacle-avoidance move-forward De Greef & Nolfi, Infrared-off -> move-forward Infrared-on -> avoid-obstacles move-f. & avoid-ob. -> find areas ground-black -> remain on the black area look-robot-and-follow-border ground-white/black -> signal A/B Sound-B & ground-black -> exit from black area Sound-A & ground-white -> remain on white area follow border Sound-B & ground-white -> & exit seerobot from white -> exit area from white area toward the other robot exit from white & move-f -> navigate-to-black look-r.-follow-b. & & move-f -> navigate-to-white
12 Multi-level formation, innovations, incrementality & complexification! navigate-to-white look-robot-and-follow-border navigate-to-black exit-from-white-area toward exit-from-white-area the other robot exit-from-black-area remain-on-white-area signal A/B remain-on-black-area find-areas obstacle-avoidance move-forward New higher-level capacities emerge through the interactions between pre-existing skills or through new traits combined with skill re-use Innovations are enabled by the new adaptive opportunities created by the effects of agents s and by the possibility to re-use existing capacity Established skills (assuming new functions) tend to be preserved thus leading to an incremental process and to a complexification of agents skills De Greef & Nolfi, 2010.
13 Language and action integration and synergies between language and action development! navigate-to-white look-robot-and-follow-border navigate-to-black exit-from-white-area toward exit-from-white-area the other robot exit-from-black-area remain-on-white-area Signals are grounded in al skills The meaning of a signal is constituted by the action/s triggered by the signal in a specific context. signal A/B remain-on-black-area find-areas obstacle-avoidance move-forward De Greef & Nolfi, 2010.
14 3. How the multi-level and multi-scale organization of enable compositionality and generalization indicate-red Environment Body indicate-blue Control System indicate-green

15 Development of early language comprehension capabilities Fitness: The robot is rewarded for the ability to realize the goals of the experienced utterances. INDICATE IGNORE TOUCH MOVE BLUE RED GREEN YES YES YES YES YES NO NO YES YES Tuci, Ferrauto, Zeschel, Massera, Nolfi (2009, 2011)



16 Development of early language comprehension capabilities INDICATE RED TOUCH YELLOW GRASP RED Ferrauto and Nolfi (2012)
17 Generalization in Comprehension and Action Production By post-evaluating the robots at the end of the training process with observed that some of them display an ability to comprehend the two new utterances by displaying the corresponding appropriate s. indicate-red Environment Body indicate-blue Robots trained to produce related skills tend to lead to solutions based on multi-level organizations supporting skill re-combination and re-use. Control System indicate-green Tuci, Ferrauto, Arne, Massera, Nolfi (2010, 2011)
18 thank you for your attention
Evolution of communication-based collaborative behavior in homogeneous robots
 Evolution of communication-based collaborative behavior in homogeneous robots Onofrio Gigliotta 1 and Marco Mirolli 2 1 Natural and Artificial Cognition Lab, University of Naples Federico II, Napoli, Italy
Evolution of communication-based collaborative behavior in homogeneous robots Onofrio Gigliotta 1 and Marco Mirolli 2 1 Natural and Artificial Cognition Lab, University of Naples Federico II, Napoli, Italy
Behavior and Cognition as a Complex Adaptive System: Insights from Robotic Experiments
 Behavior and Cognition as a Complex Adaptive System: Insights from Robotic Experiments Stefano Nolfi Institute of Cognitive Sciences and Technologies National Research Council (CNR) Via S. Martino della
Behavior and Cognition as a Complex Adaptive System: Insights from Robotic Experiments Stefano Nolfi Institute of Cognitive Sciences and Technologies National Research Council (CNR) Via S. Martino della
EMERGENCE OF COMMUNICATION IN TEAMS OF EMBODIED AND SITUATED AGENTS
 EMERGENCE OF COMMUNICATION IN TEAMS OF EMBODIED AND SITUATED AGENTS DAVIDE MAROCCO STEFANO NOLFI Institute of Cognitive Science and Technologies, CNR, Via San Martino della Battaglia 44, Rome, 00185, Italy
EMERGENCE OF COMMUNICATION IN TEAMS OF EMBODIED AND SITUATED AGENTS DAVIDE MAROCCO STEFANO NOLFI Institute of Cognitive Science and Technologies, CNR, Via San Martino della Battaglia 44, Rome, 00185, Italy
Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization
 Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization Learning to avoid obstacles Outline Problem encoding using GA and ANN Floreano and Mondada
Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization Learning to avoid obstacles Outline Problem encoding using GA and ANN Floreano and Mondada
Evolution of Acoustic Communication Between Two Cooperating Robots
 Evolution of Acoustic Communication Between Two Cooperating Robots Elio Tuci and Christos Ampatzis CoDE-IRIDIA, Université Libre de Bruxelles - Bruxelles - Belgium {etuci,campatzi}@ulb.ac.be Abstract.
Evolution of Acoustic Communication Between Two Cooperating Robots Elio Tuci and Christos Ampatzis CoDE-IRIDIA, Université Libre de Bruxelles - Bruxelles - Belgium {etuci,campatzi}@ulb.ac.be Abstract.
SWARM-BOT: A Swarm of Autonomous Mobile Robots with Self-Assembling Capabilities
 SWARM-BOT: A Swarm of Autonomous Mobile Robots with Self-Assembling Capabilities Francesco Mondada 1, Giovanni C. Pettinaro 2, Ivo Kwee 2, André Guignard 1, Luca Gambardella 2, Dario Floreano 1, Stefano
SWARM-BOT: A Swarm of Autonomous Mobile Robots with Self-Assembling Capabilities Francesco Mondada 1, Giovanni C. Pettinaro 2, Ivo Kwee 2, André Guignard 1, Luca Gambardella 2, Dario Floreano 1, Stefano
Functional Modularity Enables the Realization of Smooth and Effective Behavior Integration
 Functional Modularity Enables the Realization of Smooth and Effective Behavior Integration Jonata Tyska Carvalho 1,2, Stefano Nolfi 1 1 Institute of Cognitive Sciences and Technologies, National Research
Functional Modularity Enables the Realization of Smooth and Effective Behavior Integration Jonata Tyska Carvalho 1,2, Stefano Nolfi 1 1 Institute of Cognitive Sciences and Technologies, National Research
Distributed Intelligent Systems W11 Machine-Learning Methods Applied to Distributed Robotic Systems
 Distributed Intelligent Systems W11 Machine-Learning Methods Applied to Distributed Robotic Systems 1 Outline Revisiting expensive optimization problems Additional experimental evidence Noise-resistant
Distributed Intelligent Systems W11 Machine-Learning Methods Applied to Distributed Robotic Systems 1 Outline Revisiting expensive optimization problems Additional experimental evidence Noise-resistant
Holland, Jane; Griffith, Josephine; O'Riordan, Colm.
 Provided by the author(s) and NUI Galway in accordance with publisher policies. Please cite the published version when available. Title An evolutionary approach to formation control with mobile robots
Provided by the author(s) and NUI Galway in accordance with publisher policies. Please cite the published version when available. Title An evolutionary approach to formation control with mobile robots
Minimal Communication Strategies for Self-Organising Synchronisation Behaviours
 Minimal Communication Strategies for Self-Organising Synchronisation Behaviours Vito Trianni and Stefano Nolfi LARAL-ISTC-CNR, Rome, Italy Email: vito.trianni@istc.cnr.it, stefano.nolfi@istc.cnr.it Abstract
Minimal Communication Strategies for Self-Organising Synchronisation Behaviours Vito Trianni and Stefano Nolfi LARAL-ISTC-CNR, Rome, Italy Email: vito.trianni@istc.cnr.it, stefano.nolfi@istc.cnr.it Abstract
Biologically Inspired Embodied Evolution of Survival
 Biologically Inspired Embodied Evolution of Survival Stefan Elfwing 1,2 Eiji Uchibe 2 Kenji Doya 2 Henrik I. Christensen 1 1 Centre for Autonomous Systems, Numerical Analysis and Computer Science, Royal
Biologically Inspired Embodied Evolution of Survival Stefan Elfwing 1,2 Eiji Uchibe 2 Kenji Doya 2 Henrik I. Christensen 1 1 Centre for Autonomous Systems, Numerical Analysis and Computer Science, Royal
Hole Avoidance: Experiments in Coordinated Motion on Rough Terrain
 Hole Avoidance: Experiments in Coordinated Motion on Rough Terrain Vito Trianni, Stefano Nolfi, and Marco Dorigo IRIDIA - Université Libre de Bruxelles, Bruxelles, Belgium Institute of Cognitive Sciences
Hole Avoidance: Experiments in Coordinated Motion on Rough Terrain Vito Trianni, Stefano Nolfi, and Marco Dorigo IRIDIA - Université Libre de Bruxelles, Bruxelles, Belgium Institute of Cognitive Sciences
Behaviour Patterns Evolution on Individual and Group Level. Stanislav Slušný, Roman Neruda, Petra Vidnerová. CIMMACS 07, December 14, Tenerife
 Behaviour Patterns Evolution on Individual and Group Level Stanislav Slušný, Roman Neruda, Petra Vidnerová Department of Theoretical Computer Science Institute of Computer Science Academy of Science of
Behaviour Patterns Evolution on Individual and Group Level Stanislav Slušný, Roman Neruda, Petra Vidnerová Department of Theoretical Computer Science Institute of Computer Science Academy of Science of
Subsumption Architecture in Swarm Robotics. Cuong Nguyen Viet 16/11/2015
 Subsumption Architecture in Swarm Robotics Cuong Nguyen Viet 16/11/2015 1 Table of content Motivation Subsumption Architecture Background Architecture decomposition Implementation Swarm robotics Swarm
Subsumption Architecture in Swarm Robotics Cuong Nguyen Viet 16/11/2015 1 Table of content Motivation Subsumption Architecture Background Architecture decomposition Implementation Swarm robotics Swarm
Université Libre de Bruxelles
 Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Evolved homogeneous neuro-controllers for robots with different sensory capabilities:
Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Evolved homogeneous neuro-controllers for robots with different sensory capabilities:
CYCLIC GENETIC ALGORITHMS FOR EVOLVING MULTI-LOOP CONTROL PROGRAMS
 CYCLIC GENETIC ALGORITHMS FOR EVOLVING MULTI-LOOP CONTROL PROGRAMS GARY B. PARKER, CONNECTICUT COLLEGE, USA, parker@conncoll.edu IVO I. PARASHKEVOV, CONNECTICUT COLLEGE, USA, iipar@conncoll.edu H. JOSEPH
CYCLIC GENETIC ALGORITHMS FOR EVOLVING MULTI-LOOP CONTROL PROGRAMS GARY B. PARKER, CONNECTICUT COLLEGE, USA, parker@conncoll.edu IVO I. PARASHKEVOV, CONNECTICUT COLLEGE, USA, iipar@conncoll.edu H. JOSEPH
Evolving communicating agents that integrate information over time: a real robot experiment
 Evolving communicating agents that integrate information over time: a real robot experiment Christos Ampatzis, Elio Tuci, Vito Trianni and Marco Dorigo IRIDIA - Université Libre de Bruxelles, Bruxelles,
Evolving communicating agents that integrate information over time: a real robot experiment Christos Ampatzis, Elio Tuci, Vito Trianni and Marco Dorigo IRIDIA - Université Libre de Bruxelles, Bruxelles,
FARSA 1 : An Open Software Tool for Embodied Cognitive Science
 FARSA 1 : An Open Software Tool for Embodied Cognitive Science Gianluca Massera 2, Tomassino Ferrauto 2, Onofrio Gigliotta 3, Stefano Nolfi 2 1 http://laral.istc.cnr.it/farsa 2 Institute of Cognitive Sciences
FARSA 1 : An Open Software Tool for Embodied Cognitive Science Gianluca Massera 2, Tomassino Ferrauto 2, Onofrio Gigliotta 3, Stefano Nolfi 2 1 http://laral.istc.cnr.it/farsa 2 Institute of Cognitive Sciences
Socially-Mediated Negotiation for Obstacle Avoidance in Collective Transport
 Socially-Mediated Negotiation for Obstacle Avoidance in Collective Transport Eliseo Ferrante, Manuele Brambilla, Mauro Birattari and Marco Dorigo IRIDIA, CoDE, Université Libre de Bruxelles, Brussels,
Socially-Mediated Negotiation for Obstacle Avoidance in Collective Transport Eliseo Ferrante, Manuele Brambilla, Mauro Birattari and Marco Dorigo IRIDIA, CoDE, Université Libre de Bruxelles, Brussels,
Socially-Mediated Negotiation for Obstacle Avoidance in Collective Transport
 Socially-Mediated Negotiation for Obstacle Avoidance in Collective Transport Eliseo Ferrante, Manuele Brambilla, Mauro Birattari, and Marco Dorigo Abstract. In this paper, we present a novel method for
Socially-Mediated Negotiation for Obstacle Avoidance in Collective Transport Eliseo Ferrante, Manuele Brambilla, Mauro Birattari, and Marco Dorigo Abstract. In this paper, we present a novel method for
Université Libre de Bruxelles
 Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Cooperation through self-assembling in multi-robot systems ELIO TUCI, RODERICH
Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Cooperation through self-assembling in multi-robot systems ELIO TUCI, RODERICH
Evolving non-trivial Behaviors on Real Robots: an Autonomous Robot that Picks up Objects
 Evolving non-trivial Behaviors on Real Robots: an Autonomous Robot that Picks up Objects Stefano Nolfi Domenico Parisi Institute of Psychology, National Research Council 15, Viale Marx - 00187 - Rome -
Evolving non-trivial Behaviors on Real Robots: an Autonomous Robot that Picks up Objects Stefano Nolfi Domenico Parisi Institute of Psychology, National Research Council 15, Viale Marx - 00187 - Rome -
Cooperation through self-assembly in multi-robot systems
 Cooperation through self-assembly in multi-robot systems ELIO TUCI IRIDIA - Université Libre de Bruxelles - Belgium RODERICH GROSS IRIDIA - Université Libre de Bruxelles - Belgium VITO TRIANNI IRIDIA -
Cooperation through self-assembly in multi-robot systems ELIO TUCI IRIDIA - Université Libre de Bruxelles - Belgium RODERICH GROSS IRIDIA - Université Libre de Bruxelles - Belgium VITO TRIANNI IRIDIA -
PES: A system for parallelized fitness evaluation of evolutionary methods
 PES: A system for parallelized fitness evaluation of evolutionary methods Onur Soysal, Erkin Bahçeci, and Erol Şahin Department of Computer Engineering Middle East Technical University 06531 Ankara, Turkey
PES: A system for parallelized fitness evaluation of evolutionary methods Onur Soysal, Erkin Bahçeci, and Erol Şahin Department of Computer Engineering Middle East Technical University 06531 Ankara, Turkey
Evolution, Self-Organisation and Swarm Robotics
 Evolution, Self-Organisation and Swarm Robotics Vito Trianni 1, Stefano Nolfi 1, and Marco Dorigo 2 1 LARAL research group ISTC, Consiglio Nazionale delle Ricerche, Rome, Italy {vito.trianni,stefano.nolfi}@istc.cnr.it
Evolution, Self-Organisation and Swarm Robotics Vito Trianni 1, Stefano Nolfi 1, and Marco Dorigo 2 1 LARAL research group ISTC, Consiglio Nazionale delle Ricerche, Rome, Italy {vito.trianni,stefano.nolfi}@istc.cnr.it
Swarm-Bots to the Rescue
 Swarm-Bots to the Rescue Rehan O Grady 1, Carlo Pinciroli 1,RoderichGroß 2, Anders Lyhne Christensen 3, Francesco Mondada 2, Michael Bonani 2,andMarcoDorigo 1 1 IRIDIA, CoDE, Université Libre de Bruxelles,
Swarm-Bots to the Rescue Rehan O Grady 1, Carlo Pinciroli 1,RoderichGroß 2, Anders Lyhne Christensen 3, Francesco Mondada 2, Michael Bonani 2,andMarcoDorigo 1 1 IRIDIA, CoDE, Université Libre de Bruxelles,
Negotiation of Goal Direction for Cooperative Transport
 Negotiation of Goal Direction for Cooperative Transport Alexandre Campo, Shervin Nouyan, Mauro Birattari, Roderich Groß, and Marco Dorigo IRIDIA, CoDE, Université Libre de Bruxelles, Brussels, Belgium
Negotiation of Goal Direction for Cooperative Transport Alexandre Campo, Shervin Nouyan, Mauro Birattari, Roderich Groß, and Marco Dorigo IRIDIA, CoDE, Université Libre de Bruxelles, Brussels, Belgium
Université Libre de Bruxelles
 Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Cooperation through self-assembly in multi-robot systems Elio Tuci, Roderich Groß,
Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Cooperation through self-assembly in multi-robot systems Elio Tuci, Roderich Groß,
A Novel Approach to Swarm Bot Architecture
 2009 International Asia Conference on Informatics in Control, Automation and Robotics A Novel Approach to Swarm Bot Architecture Vinay Kumar Pilania 5 th Year Student, Dept. of Mining Engineering, vinayiitkgp2004@gmail.com
2009 International Asia Conference on Informatics in Control, Automation and Robotics A Novel Approach to Swarm Bot Architecture Vinay Kumar Pilania 5 th Year Student, Dept. of Mining Engineering, vinayiitkgp2004@gmail.com
Evolved Neurodynamics for Robot Control
 Evolved Neurodynamics for Robot Control Frank Pasemann, Martin Hülse, Keyan Zahedi Fraunhofer Institute for Autonomous Intelligent Systems (AiS) Schloss Birlinghoven, D-53754 Sankt Augustin, Germany Abstract
Evolved Neurodynamics for Robot Control Frank Pasemann, Martin Hülse, Keyan Zahedi Fraunhofer Institute for Autonomous Intelligent Systems (AiS) Schloss Birlinghoven, D-53754 Sankt Augustin, Germany Abstract
Negotiation of Goal Direction for Cooperative Transport
 Negotiation of Goal Direction for Cooperative Transport Alexandre Campo, Shervin Nouyan, Mauro Birattari, Roderich Groß, and Marco Dorigo IRIDIA, CoDE, Université Libre de Bruxelles, Brussels, Belgium
Negotiation of Goal Direction for Cooperative Transport Alexandre Campo, Shervin Nouyan, Mauro Birattari, Roderich Groß, and Marco Dorigo IRIDIA, CoDE, Université Libre de Bruxelles, Brussels, Belgium
Implicit Fitness Functions for Evolving a Drawing Robot
 Implicit Fitness Functions for Evolving a Drawing Robot Jon Bird, Phil Husbands, Martin Perris, Bill Bigge and Paul Brown Centre for Computational Neuroscience and Robotics University of Sussex, Brighton,
Implicit Fitness Functions for Evolving a Drawing Robot Jon Bird, Phil Husbands, Martin Perris, Bill Bigge and Paul Brown Centre for Computational Neuroscience and Robotics University of Sussex, Brighton,
Evolutions of communication
 Evolutions of communication Alex Bell, Andrew Pace, and Raul Santos May 12, 2009 Abstract In this paper a experiment is presented in which two simulated robots evolved a form of communication to allow
Evolutions of communication Alex Bell, Andrew Pace, and Raul Santos May 12, 2009 Abstract In this paper a experiment is presented in which two simulated robots evolved a form of communication to allow
Online Interactive Neuro-evolution
 Appears in Neural Processing Letters, 1999. Online Interactive Neuro-evolution Adrian Agogino (agogino@ece.utexas.edu) Kenneth Stanley (kstanley@cs.utexas.edu) Risto Miikkulainen (risto@cs.utexas.edu)
Appears in Neural Processing Letters, 1999. Online Interactive Neuro-evolution Adrian Agogino (agogino@ece.utexas.edu) Kenneth Stanley (kstanley@cs.utexas.edu) Risto Miikkulainen (risto@cs.utexas.edu)
Evolving Neural Mechanisms for an Iterated Discrimination Task: A Robot Based Model
 Evolving Neural Mechanisms for an Iterated Discrimination Task: A Robot Based Model Elio Tuci, Christos Ampatzis, and Marco Dorigo IRIDIA, Université Libre de Bruxelles - Bruxelles - Belgium {etuci, campatzi,
Evolving Neural Mechanisms for an Iterated Discrimination Task: A Robot Based Model Elio Tuci, Christos Ampatzis, and Marco Dorigo IRIDIA, Université Libre de Bruxelles - Bruxelles - Belgium {etuci, campatzi,
EDUCATION AND RESEARCH EXPERIENCE
 STEFANO NOLFI Born 23 September 1963, Rome (Italy) Institute of Cognitive Science and Technology (ISTC) Italian National Research Council (CNR) Via della Cisa, 11, 00141, Rome, Italy Voice: +39 06 44595233
STEFANO NOLFI Born 23 September 1963, Rome (Italy) Institute of Cognitive Science and Technology (ISTC) Italian National Research Council (CNR) Via della Cisa, 11, 00141, Rome, Italy Voice: +39 06 44595233
Efficient Evaluation Functions for Multi-Rover Systems
 Efficient Evaluation Functions for Multi-Rover Systems Adrian Agogino 1 and Kagan Tumer 2 1 University of California Santa Cruz, NASA Ames Research Center, Mailstop 269-3, Moffett Field CA 94035, USA,
Efficient Evaluation Functions for Multi-Rover Systems Adrian Agogino 1 and Kagan Tumer 2 1 University of California Santa Cruz, NASA Ames Research Center, Mailstop 269-3, Moffett Field CA 94035, USA,
Evolution of Embodied Intelligence
 Evolution of Embodied Intelligence Dario Floreano, Francesco Mondada, Andres Perez-Uribe, and Daniel Roggen Autonomous Systems Laboratory (ASL) Institute of Systems Engineering (I2S) Swiss Federal Institute
Evolution of Embodied Intelligence Dario Floreano, Francesco Mondada, Andres Perez-Uribe, and Daniel Roggen Autonomous Systems Laboratory (ASL) Institute of Systems Engineering (I2S) Swiss Federal Institute
Dipartimento di Elettronica Informazione e Bioingegneria Robotics
 Dipartimento di Elettronica Informazione e Bioingegneria Robotics Behavioral robotics @ 2014 Behaviorism behave is what organisms do Behaviorism is built on this assumption, and its goal is to promote
Dipartimento di Elettronica Informazione e Bioingegneria Robotics Behavioral robotics @ 2014 Behaviorism behave is what organisms do Behaviorism is built on this assumption, and its goal is to promote
Cognitive robots and emotional intelligence Cloud robotics Ethical, legal and social issues of robotic Construction robots Human activities in many
 Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Evolving Mobile Robots in Simulated and Real Environments
 Evolving Mobile Robots in Simulated and Real Environments Orazio Miglino*, Henrik Hautop Lund**, Stefano Nolfi*** *Department of Psychology, University of Palermo, Italy e-mail: orazio@caio.irmkant.rm.cnr.it
Evolving Mobile Robots in Simulated and Real Environments Orazio Miglino*, Henrik Hautop Lund**, Stefano Nolfi*** *Department of Psychology, University of Palermo, Italy e-mail: orazio@caio.irmkant.rm.cnr.it
MITIGATING SPATIAL INTERFERENCE IN A SCALABLE ROBOT RECYCLING SYSTEM ANDREW VARDY AUGUST 2015
 MITIGATING SPATIAL INTERFERENCE IN A SCALABLE ROBOT RECYCLING SYSTEM ANDREW VARDY AUGUST 2015 2014-15 HARRIS CENTRE - MMSB WASTE MANAGEMENT APPLIED RESEARCH FUND Contents 1 Acknowledgements 3 2 Executive
MITIGATING SPATIAL INTERFERENCE IN A SCALABLE ROBOT RECYCLING SYSTEM ANDREW VARDY AUGUST 2015 2014-15 HARRIS CENTRE - MMSB WASTE MANAGEMENT APPLIED RESEARCH FUND Contents 1 Acknowledgements 3 2 Executive
Effect of Sensor and Actuator Quality on Robot Swarm Algorithm Performance
 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems September 25-30, 2011. San Francisco, CA, USA Effect of Sensor and Actuator Quality on Robot Swarm Algorithm Performance Nicholas
2011 IEEE/RSJ International Conference on Intelligent Robots and Systems September 25-30, 2011. San Francisco, CA, USA Effect of Sensor and Actuator Quality on Robot Swarm Algorithm Performance Nicholas
Evolving Robot Behaviour at Micro (Molecular) and Macro (Molar) Action Level
 and Macro (Molar) Action Level") Evolving Robot Behaviour at Micro (Molecular) and Macro (Molar) Action Level Michela Ponticorvo 1 and Orazio Miglino 1, 2 1 Department of Relational Sciences G.Iacono, University of Naples Federico II,
Evolving Robot Behaviour at Micro (Molecular) and Macro (Molar) Action Level Michela Ponticorvo 1 and Orazio Miglino 1, 2 1 Department of Relational Sciences G.Iacono, University of Naples Federico II,
Breedbot: An Edutainment Robotics System to Link Digital and Real World
 Breedbot: An Edutainment Robotics System to Link Digital and Real World Orazio Miglino 1,2, Onofrio Gigliotta 2,3, Michela Ponticorvo 1, and Stefano Nolfi 2 1 Department of Relational Sciences G.Iacono,
Breedbot: An Edutainment Robotics System to Link Digital and Real World Orazio Miglino 1,2, Onofrio Gigliotta 2,3, Michela Ponticorvo 1, and Stefano Nolfi 2 1 Department of Relational Sciences G.Iacono,
Université Libre de Bruxelles
 Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Self-Assembly in Physical Autonomous Robots: the Evolutionary Robotics Approach
Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Self-Assembly in Physical Autonomous Robots: the Evolutionary Robotics Approach
Evolving Spiking Neurons from Wheels to Wings
 Evolving Spiking Neurons from Wheels to Wings Dario Floreano, Jean-Christophe Zufferey, Claudio Mattiussi Autonomous Systems Lab, Institute of Systems Engineering Swiss Federal Institute of Technology
Evolving Spiking Neurons from Wheels to Wings Dario Floreano, Jean-Christophe Zufferey, Claudio Mattiussi Autonomous Systems Lab, Institute of Systems Engineering Swiss Federal Institute of Technology
Université Libre de Bruxelles
 Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Look out! : Socially-Mediated Obstacle Avoidance in Collective Transport Eliseo
Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Look out! : Socially-Mediated Obstacle Avoidance in Collective Transport Eliseo
Université Libre de Bruxelles
 Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Evolution of Signaling in a Multi-Robot System: Categorization and Communication
Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Evolution of Signaling in a Multi-Robot System: Categorization and Communication
SWARM ROBOTICS - SURVEILLANCE AND MONITORING OF DAMAGES CAUSED BY MOTOR ACCIDENTS
 SWARM ROBOTICS - SURVEILLANCE AND MONITORING OF DAMAGES CAUSED BY MOTOR ACCIDENTS 1 AYUSH KHEMKA, 2 JOSE MICHAEL, 3 SUJEETH PANICKER Rajiv Gandhi Institute of Technology, Versova, Mumbai Email: ayushkster@gmail.com,
SWARM ROBOTICS - SURVEILLANCE AND MONITORING OF DAMAGES CAUSED BY MOTOR ACCIDENTS 1 AYUSH KHEMKA, 2 JOSE MICHAEL, 3 SUJEETH PANICKER Rajiv Gandhi Institute of Technology, Versova, Mumbai Email: ayushkster@gmail.com,
Evolutionary Conditions for the Emergence of Communication
 Evolutionary Conditions for the Emergence of Communication Sara Mitri, Dario Floreano and Laurent Keller Laboratory of Intelligent Systems, EPFL Department of Ecology and Evolution, University of Lausanne
Evolutionary Conditions for the Emergence of Communication Sara Mitri, Dario Floreano and Laurent Keller Laboratory of Intelligent Systems, EPFL Department of Ecology and Evolution, University of Lausanne
Using Cyclic Genetic Algorithms to Evolve Multi-Loop Control Programs
 Using Cyclic Genetic Algorithms to Evolve Multi-Loop Control Programs Gary B. Parker Computer Science Connecticut College New London, CT 0630, USA parker@conncoll.edu Ramona A. Georgescu Electrical and
Using Cyclic Genetic Algorithms to Evolve Multi-Loop Control Programs Gary B. Parker Computer Science Connecticut College New London, CT 0630, USA parker@conncoll.edu Ramona A. Georgescu Electrical and
RISTO MIIKKULAINEN, SENTIENT (HTTP://VENTUREBEAT.COM/AUTHOR/RISTO-MIIKKULAINEN- SATIENT/) APRIL 3, :23 PM
 APRIL 3, :23 PM") 1,2 Guest Machines are becoming more creative than humans RISTO MIIKKULAINEN, SENTIENT (HTTP://VENTUREBEAT.COM/AUTHOR/RISTO-MIIKKULAINEN- SATIENT/) APRIL 3, 2016 12:23 PM TAGS: ARTIFICIAL INTELLIGENCE
1,2 Guest Machines are becoming more creative than humans RISTO MIIKKULAINEN, SENTIENT (HTTP://VENTUREBEAT.COM/AUTHOR/RISTO-MIIKKULAINEN- SATIENT/) APRIL 3, 2016 12:23 PM TAGS: ARTIFICIAL INTELLIGENCE
Institute of Psychology C.N.R. - Rome. Evolving non-trivial Behaviors on Real Robots: a garbage collecting robot
 Institute of Psychology C.N.R. - Rome Evolving non-trivial Behaviors on Real Robots: a garbage collecting robot Stefano Nolfi Institute of Psychology, National Research Council, Rome, Italy. e-mail: stefano@kant.irmkant.rm.cnr.it
Institute of Psychology C.N.R. - Rome Evolving non-trivial Behaviors on Real Robots: a garbage collecting robot Stefano Nolfi Institute of Psychology, National Research Council, Rome, Italy. e-mail: stefano@kant.irmkant.rm.cnr.it
Curiosity as a Survival Technique
 Curiosity as a Survival Technique Amber Viescas Department of Computer Science Swarthmore College Swarthmore, PA 19081 aviesca1@cs.swarthmore.edu Anne-Marie Frassica Department of Computer Science Swarthmore
Curiosity as a Survival Technique Amber Viescas Department of Computer Science Swarthmore College Swarthmore, PA 19081 aviesca1@cs.swarthmore.edu Anne-Marie Frassica Department of Computer Science Swarthmore
Distributed Robotics: Building an environment for digital cooperation. Artificial Intelligence series
 Distributed Robotics: Building an environment for digital cooperation Artificial Intelligence series Distributed Robotics March 2018 02 From programmable machines to intelligent agents Robots, from the
Distributed Robotics: Building an environment for digital cooperation Artificial Intelligence series Distributed Robotics March 2018 02 From programmable machines to intelligent agents Robots, from the
Learning Reactive Neurocontrollers using Simulated Annealing for Mobile Robots
 Learning Reactive Neurocontrollers using Simulated Annealing for Mobile Robots Philippe Lucidarme, Alain Liégeois LIRMM, University Montpellier II, France, lucidarm@lirmm.fr Abstract This paper presents
Learning Reactive Neurocontrollers using Simulated Annealing for Mobile Robots Philippe Lucidarme, Alain Liégeois LIRMM, University Montpellier II, France, lucidarm@lirmm.fr Abstract This paper presents
FP7 ICT Call 6: Cognitive Systems and Robotics
 FP7 ICT Call 6: Cognitive Systems and Robotics Information day Luxembourg, January 14, 2010 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media
FP7 ICT Call 6: Cognitive Systems and Robotics Information day Luxembourg, January 14, 2010 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media
Cooperative navigation in robotic swarms
 1 Cooperative navigation in robotic swarms Frederick Ducatelle, Gianni A. Di Caro, Alexander Förster, Michael Bonani, Marco Dorigo, Stéphane Magnenat, Francesco Mondada, Rehan O Grady, Carlo Pinciroli,
1 Cooperative navigation in robotic swarms Frederick Ducatelle, Gianni A. Di Caro, Alexander Förster, Michael Bonani, Marco Dorigo, Stéphane Magnenat, Francesco Mondada, Rehan O Grady, Carlo Pinciroli,
Probabilistic Aggregation Strategies in Swarm Robotic Systems. Onur Soysal and Erol Şahin METU-CENG-TR April 2005
 Middle East Technical University Department of Computer Engineering Probabilistic Aggregation Strategies in Swarm Robotic Systems Onur Soysal and Erol Şahin METU-CENG-TR-25-2 April 25 Department of Computer
Middle East Technical University Department of Computer Engineering Probabilistic Aggregation Strategies in Swarm Robotic Systems Onur Soysal and Erol Şahin METU-CENG-TR-25-2 April 25 Department of Computer
Genetic Evolution of a Neural Network for the Autonomous Control of a Four-Wheeled Robot
 Genetic Evolution of a Neural Network for the Autonomous Control of a Four-Wheeled Robot Wilfried Elmenreich and Gernot Klingler Vienna University of Technology Institute of Computer Engineering Treitlstrasse
Genetic Evolution of a Neural Network for the Autonomous Control of a Four-Wheeled Robot Wilfried Elmenreich and Gernot Klingler Vienna University of Technology Institute of Computer Engineering Treitlstrasse
How Robot Morphology and Training Order Affect the Learning of Multiple Behaviors
 How Robot Morphology and Training Order Affect the Learning of Multiple Behaviors Joshua Auerbach Josh C. Bongard Abstract Automatically synthesizing behaviors for robots with articulated bodies poses
How Robot Morphology and Training Order Affect the Learning of Multiple Behaviors Joshua Auerbach Josh C. Bongard Abstract Automatically synthesizing behaviors for robots with articulated bodies poses
GA-based Learning in Behaviour Based Robotics
 Proceedings of IEEE International Symposium on Computational Intelligence in Robotics and Automation, Kobe, Japan, 16-20 July 2003 GA-based Learning in Behaviour Based Robotics Dongbing Gu, Huosheng Hu,
Proceedings of IEEE International Symposium on Computational Intelligence in Robotics and Automation, Kobe, Japan, 16-20 July 2003 GA-based Learning in Behaviour Based Robotics Dongbing Gu, Huosheng Hu,
Université Libre de Bruxelles
 Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Evolving Autonomous Self-Assembly in Homogeneous Robots Christos Ampatzis, Elio
Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Evolving Autonomous Self-Assembly in Homogeneous Robots Christos Ampatzis, Elio
Formica ex Machina: Ant Swarm Foraging from Physical to Virtual and Back Again
 Formica ex Machina: Ant Swarm Foraging from Physical to Virtual and Back Again Joshua P. Hecker 1, Kenneth Letendre 1,2, Karl Stolleis 1, Daniel Washington 1, and Melanie E. Moses 1,2 1 Department of Computer
Formica ex Machina: Ant Swarm Foraging from Physical to Virtual and Back Again Joshua P. Hecker 1, Kenneth Letendre 1,2, Karl Stolleis 1, Daniel Washington 1, and Melanie E. Moses 1,2 1 Department of Computer
Control system of person following robot: The indoor exploration subtask. Solaiman. Shokur
 Control system of person following robot: The indoor exploration subtask Solaiman. Shokur 20th February 2004 Contents 1 Introduction 3 1.1 An historical overview...................... 3 1.2 Reactive, pro-active
Control system of person following robot: The indoor exploration subtask Solaiman. Shokur 20th February 2004 Contents 1 Introduction 3 1.1 An historical overview...................... 3 1.2 Reactive, pro-active
The Case for Engineering the Evolution of Robot Controllers
 The Case for Engineering the Evolution of Robot Controllers Fernando Silva 1,3, Miguel Duarte 1,2, Sancho Moura Oliveira 1,2, Luís Correia 3 and Anders Lyhne Christensen 1,2 1 Instituto de Telecomunicações,
The Case for Engineering the Evolution of Robot Controllers Fernando Silva 1,3, Miguel Duarte 1,2, Sancho Moura Oliveira 1,2, Luís Correia 3 and Anders Lyhne Christensen 1,2 1 Instituto de Telecomunicações,
Behavior Emergence in Autonomous Robot Control by Means of Feedforward and Recurrent Neural Networks
 Behavior Emergence in Autonomous Robot Control by Means of Feedforward and Recurrent Neural Networks Stanislav Slušný, Petra Vidnerová, Roman Neruda Abstract We study the emergence of intelligent behavior
Behavior Emergence in Autonomous Robot Control by Means of Feedforward and Recurrent Neural Networks Stanislav Slušný, Petra Vidnerová, Roman Neruda Abstract We study the emergence of intelligent behavior
Developing Frogger Player Intelligence Using NEAT and a Score Driven Fitness Function
 Developing Frogger Player Intelligence Using NEAT and a Score Driven Fitness Function Davis Ancona and Jake Weiner Abstract In this report, we examine the plausibility of implementing a NEAT-based solution
Developing Frogger Player Intelligence Using NEAT and a Score Driven Fitness Function Davis Ancona and Jake Weiner Abstract In this report, we examine the plausibility of implementing a NEAT-based solution
Group-size Regulation in Self-Organised Aggregation through the Naming Game
 Group-size Regulation in Self-Organised Aggregation through the Naming Game Nicolas Cambier 1, Vincent Frémont 1 and Eliseo Ferrante 2 1 Sorbonne universités, Université de technologie de Compiègne, UMR
Group-size Regulation in Self-Organised Aggregation through the Naming Game Nicolas Cambier 1, Vincent Frémont 1 and Eliseo Ferrante 2 1 Sorbonne universités, Université de technologie de Compiègne, UMR
! The architecture of the robot control system! Also maybe some aspects of its body/motors/sensors
 Towards the more concrete end of the Alife spectrum is robotics. Alife -- because it is the attempt to synthesise -- at some level -- 'lifelike behaviour. AI is often associated with a particular style
Towards the more concrete end of the Alife spectrum is robotics. Alife -- because it is the attempt to synthesise -- at some level -- 'lifelike behaviour. AI is often associated with a particular style
Cooperative Behavior Acquisition in A Multiple Mobile Robot Environment by Co-evolution
 Cooperative Behavior Acquisition in A Multiple Mobile Robot Environment by Co-evolution Eiji Uchibe, Masateru Nakamura, Minoru Asada Dept. of Adaptive Machine Systems, Graduate School of Eng., Osaka University,
Cooperative Behavior Acquisition in A Multiple Mobile Robot Environment by Co-evolution Eiji Uchibe, Masateru Nakamura, Minoru Asada Dept. of Adaptive Machine Systems, Graduate School of Eng., Osaka University,
Self-organised path formation in a swarm of robots
 Swarm Intell (2011) 5: 97 119 DOI 10.1007/s11721-011-0055-y Self-organised path formation in a swarm of robots Valerio Sperati Vito Trianni Stefano Nolfi Received: 25 November 2010 / Accepted: 15 March
Swarm Intell (2011) 5: 97 119 DOI 10.1007/s11721-011-0055-y Self-organised path formation in a swarm of robots Valerio Sperati Vito Trianni Stefano Nolfi Received: 25 November 2010 / Accepted: 15 March
Environmental factors promoting the evolution of recruitment strategies in swarms of foraging robots
 Environmental factors promoting the evolution of recruitment strategies in swarms of foraging robots Steven Van Essche 1, Eliseo Ferrante 1, Ali Emre Turgut 2, Rinde Van Lon 3, Tom Holvoet 3, and Tom Wenseleers
Environmental factors promoting the evolution of recruitment strategies in swarms of foraging robots Steven Van Essche 1, Eliseo Ferrante 1, Ali Emre Turgut 2, Rinde Van Lon 3, Tom Holvoet 3, and Tom Wenseleers
Hyper-heuristic Online Learning for Self-assembling Swarm Robots
 Hyper-heuristic Online Learning for Self-assembling Swarm Robots Shuang Yu 1[0000 0001 7428 2600], Aldeida Aleti 1[0000 0002 1716 690X], Jan Carlo Barca 1[0000 0001 6939 4632], and Andy Song 2[0000 0002
Hyper-heuristic Online Learning for Self-assembling Swarm Robots Shuang Yu 1[0000 0001 7428 2600], Aldeida Aleti 1[0000 0002 1716 690X], Jan Carlo Barca 1[0000 0001 6939 4632], and Andy Song 2[0000 0002
SWARM ROBOTICS: PART 2. Dr. Andrew Vardy COMP 4766 / 6912 Department of Computer Science Memorial University of Newfoundland St.
 SWARM ROBOTICS: PART 2 Dr. Andrew Vardy COMP 4766 / 6912 Department of Computer Science Memorial University of Newfoundland St. John s, Canada PRINCIPLE: SELF-ORGANIZATION 2 SELF-ORGANIZATION Self-organization
SWARM ROBOTICS: PART 2 Dr. Andrew Vardy COMP 4766 / 6912 Department of Computer Science Memorial University of Newfoundland St. John s, Canada PRINCIPLE: SELF-ORGANIZATION 2 SELF-ORGANIZATION Self-organization
Kilobot: A Robotic Module for Demonstrating Behaviors in a Large Scale (\(2^{10}\) Units) Collective
 Units) Collective") Kilobot: A Robotic Module for Demonstrating Behaviors in a Large Scale (\(2^{10}\) Units) Collective The Harvard community has made this article openly available. Please share how this access benefits
Kilobot: A Robotic Module for Demonstrating Behaviors in a Large Scale (\(2^{10}\) Units) Collective The Harvard community has made this article openly available. Please share how this access benefits
SWARM ROBOTICS: PART 2
 SWARM ROBOTICS: PART 2 PRINCIPLE: SELF-ORGANIZATION Dr. Andrew Vardy COMP 4766 / 6912 Department of Computer Science Memorial University of Newfoundland St. John s, Canada 2 SELF-ORGANIZATION SO in Non-Biological
SWARM ROBOTICS: PART 2 PRINCIPLE: SELF-ORGANIZATION Dr. Andrew Vardy COMP 4766 / 6912 Department of Computer Science Memorial University of Newfoundland St. John s, Canada 2 SELF-ORGANIZATION SO in Non-Biological
Collective Robotics. Marcin Pilat
 Collective Robotics Marcin Pilat Introduction Painting a room Complex behaviors: Perceptions, deductions, motivations, choices Robotics: Past: single robot Future: multiple, simple robots working in teams
Collective Robotics Marcin Pilat Introduction Painting a room Complex behaviors: Perceptions, deductions, motivations, choices Robotics: Past: single robot Future: multiple, simple robots working in teams
Enhancing Embodied Evolution with Punctuated Anytime Learning
 Enhancing Embodied Evolution with Punctuated Anytime Learning Gary B. Parker, Member IEEE, and Gregory E. Fedynyshyn Abstract This paper discusses a new implementation of embodied evolution that uses the
Enhancing Embodied Evolution with Punctuated Anytime Learning Gary B. Parker, Member IEEE, and Gregory E. Fedynyshyn Abstract This paper discusses a new implementation of embodied evolution that uses the
Group Transport Along a Robot Chain in a Self-Organised Robot Colony
 Intelligent Autonomous Systems 9 T. Arai et al. (Eds.) IOS Press, 2006 2006 The authors. All rights reserved. 433 Group Transport Along a Robot Chain in a Self-Organised Robot Colony Shervin Nouyan a,
Intelligent Autonomous Systems 9 T. Arai et al. (Eds.) IOS Press, 2006 2006 The authors. All rights reserved. 433 Group Transport Along a Robot Chain in a Self-Organised Robot Colony Shervin Nouyan a,
Evolving Predator Control Programs for an Actual Hexapod Robot Predator
 Evolving Predator Control Programs for an Actual Hexapod Robot Predator Gary Parker Department of Computer Science Connecticut College New London, CT, USA parker@conncoll.edu Basar Gulcu Department of
Evolving Predator Control Programs for an Actual Hexapod Robot Predator Gary Parker Department of Computer Science Connecticut College New London, CT, USA parker@conncoll.edu Basar Gulcu Department of
Planning in autonomous mobile robotics
 Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
Sistemi Intelligenti Corso di Laurea in Informatica, A.A. 2017-2018 Università degli Studi di Milano Planning in autonomous mobile robotics Nicola Basilico Dipartimento di Informatica Via Comelico 39/41-20135
Behaviour-Based Control. IAR Lecture 5 Barbara Webb
 Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Evolution of Functional Specialization in a Morphologically Homogeneous Robot
 Evolution of Functional Specialization in a Morphologically Homogeneous Robot ABSTRACT Joshua Auerbach Morphology, Evolution and Cognition Lab Department of Computer Science University of Vermont Burlington,
Evolution of Functional Specialization in a Morphologically Homogeneous Robot ABSTRACT Joshua Auerbach Morphology, Evolution and Cognition Lab Department of Computer Science University of Vermont Burlington,
Morphological and Environmental Scaffolding Synergize when Evolving Robot Controllers
 Morphological and Environmental Scaffolding Synergize when Evolving Robot Controllers Artificial Life/Robotics/Evolvable Hardware Josh C. Bongard Department of Computer Science University of Vermont josh.bongard@uvm.edu
Morphological and Environmental Scaffolding Synergize when Evolving Robot Controllers Artificial Life/Robotics/Evolvable Hardware Josh C. Bongard Department of Computer Science University of Vermont josh.bongard@uvm.edu
understanding sensors
 The LEGO MINDSTORMS EV3 set includes three types of sensors: Touch, Color, and Infrared. You can use these sensors to make your robot respond to its environment. For example, you can program your robot
The LEGO MINDSTORMS EV3 set includes three types of sensors: Touch, Color, and Infrared. You can use these sensors to make your robot respond to its environment. For example, you can program your robot
Robotics using Lego Mindstorms EV3 (Intermediate)
") Robotics using Lego Mindstorms EV3 (Intermediate) Facebook.com/roboticsgateway @roboticsgateway Robotics using EV3 Are we ready to go Roboticists? Does each group have at least one laptop? Do you have
Robotics using Lego Mindstorms EV3 (Intermediate) Facebook.com/roboticsgateway @roboticsgateway Robotics using EV3 Are we ready to go Roboticists? Does each group have at least one laptop? Do you have
PROCEEDINGS. Full Papers CD Volume. I.Troch, F.Breitenecker, Eds.
 PROCEEDINGS Full Papers CD Volume I.Troch, F.Breitenecker, Eds. th 6 Vienna Conference on Mathematical Modelling February 11-13, 2009 Vienna University of Technology ARGESIM Report no. 35 Reprint Personal
PROCEEDINGS Full Papers CD Volume I.Troch, F.Breitenecker, Eds. th 6 Vienna Conference on Mathematical Modelling February 11-13, 2009 Vienna University of Technology ARGESIM Report no. 35 Reprint Personal
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT
 MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
Funzionalità per la navigazione di robot mobili. Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo
 Funzionalità per la navigazione di robot mobili Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Variability of the Robotic Domain UNIBG - Corso di Robotica - Prof. Brugali Tourist
Funzionalità per la navigazione di robot mobili Corso di Robotica Prof. Davide Brugali Università degli Studi di Bergamo Variability of the Robotic Domain UNIBG - Corso di Robotica - Prof. Brugali Tourist
Adaptive Neuro-Fuzzy Controler With Genetic Training For Mobile Robot Control
 Int. J. of Computers, Communications & Control, ISSN 1841-9836, E-ISSN 1841-9844 Vol. VII (2012), No. 1 (March), pp. 135-146 Adaptive Neuro-Fuzzy Controler With Genetic Training For Mobile Robot Control
Int. J. of Computers, Communications & Control, ISSN 1841-9836, E-ISSN 1841-9844 Vol. VII (2012), No. 1 (March), pp. 135-146 Adaptive Neuro-Fuzzy Controler With Genetic Training For Mobile Robot Control
Université Libre de Bruxelles
 Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Self-assembly of Mobile Robots: From Swarm-bot to Super-mechano Colony Roderich
Université Libre de Bruxelles Institut de Recherches Interdisciplinaires et de Développements en Intelligence Artificielle Self-assembly of Mobile Robots: From Swarm-bot to Super-mechano Colony Roderich
Sample Pages. Classroom Activities for the Busy Teacher: NXT. 2 nd Edition. Classroom Activities for the Busy Teacher: NXT -
 Classroom Activities for the Busy Teacher: NXT 2 nd Edition Table of Contents Chapter 1: Introduction... 1 Chapter 2: What is a robot?... 5 Chapter 3: Flowcharting... 11 Chapter 4: DomaBot Basics... 15
Classroom Activities for the Busy Teacher: NXT 2 nd Edition Table of Contents Chapter 1: Introduction... 1 Chapter 2: What is a robot?... 5 Chapter 3: Flowcharting... 11 Chapter 4: DomaBot Basics... 15
Overview of Challenges in the Development of Autonomous Mobile Robots. August 23, 2011
 Overview of Challenges in the Development of Autonomous Mobile Robots August 23, 2011 What is in a Robot? Sensors Effectors and actuators (i.e., mechanical) Used for locomotion and manipulation Controllers
Overview of Challenges in the Development of Autonomous Mobile Robots August 23, 2011 What is in a Robot? Sensors Effectors and actuators (i.e., mechanical) Used for locomotion and manipulation Controllers
Laboratory 7: CONTROL SYSTEMS FUNDAMENTALS
 Laboratory 7: CONTROL SYSTEMS FUNDAMENTALS OBJECTIVES - Familiarize the students in the area of automatization and control. - Familiarize the student with programming of toy robots. EQUIPMENT AND REQUERIED
Laboratory 7: CONTROL SYSTEMS FUNDAMENTALS OBJECTIVES - Familiarize the students in the area of automatization and control. - Familiarize the student with programming of toy robots. EQUIPMENT AND REQUERIED
Ezequiel Di Mario, Iñaki Navarro and Alcherio Martinoli. Background. Introduction. Particle Swarm Optimization
 The Effect of the Environment in the Synthesis of Robotic Controllers: A Case Study in Multi-Robot Obstacle Avoidance using Distributed Particle Swarm Optimization Ezequiel Di Mario, Iñaki Navarro and
The Effect of the Environment in the Synthesis of Robotic Controllers: A Case Study in Multi-Robot Obstacle Avoidance using Distributed Particle Swarm Optimization Ezequiel Di Mario, Iñaki Navarro and
Evolving High-Dimensional, Adaptive Camera-Based Speed Sensors
 In: M.H. Hamza (ed.), Proceedings of the 21st IASTED Conference on Applied Informatics, pp. 1278-128. Held February, 1-1, 2, Insbruck, Austria Evolving High-Dimensional, Adaptive Camera-Based Speed Sensors
In: M.H. Hamza (ed.), Proceedings of the 21st IASTED Conference on Applied Informatics, pp. 1278-128. Held February, 1-1, 2, Insbruck, Austria Evolving High-Dimensional, Adaptive Camera-Based Speed Sensors
We recommend you cite the published version. The publisher s URL is:
 O Dowd, P., Studley, M. and Winfield, A. F. (2014) The distributed co-evolution of an on-board simulator and controller for swarm robot behaviours. Evolutionary Intelligence, 7 (2). pp. 95-106. ISSN 1864-5909
O Dowd, P., Studley, M. and Winfield, A. F. (2014) The distributed co-evolution of an on-board simulator and controller for swarm robot behaviours. Evolutionary Intelligence, 7 (2). pp. 95-106. ISSN 1864-5909
COSC343: Artificial Intelligence
 COSC343: Artificial Intelligence Lecture 2: Starting from scratch: robotics and embodied AI Alistair Knott Dept. of Computer Science, University of Otago Alistair Knott (Otago) COSC343 Lecture 2 1 / 29
COSC343: Artificial Intelligence Lecture 2: Starting from scratch: robotics and embodied AI Alistair Knott Dept. of Computer Science, University of Otago Alistair Knott (Otago) COSC343 Lecture 2 1 / 29