AUV Self-Localization Using a Tetrahedral Array and Passive Acoustics
|
|
|
- Nickolas Rich
- 5 years ago
- Views:
Transcription


1 AUV Self-Localization Using a Tetrahedral Array and Passive Acoustics Nicholas R. Rypkema Erin M. Fischell Henrik Schmidt
2 Background - Motivation Motivation: Accurate localization for miniature, low-cost AUVs - Testbed to experiment with risky behaviors - Lower the barrier toward multi-auv research - Distributed sensing to capture spatial/temporal variation of ocean processes - Virtual dynamic acoustic arrays 1





3 Background - Motivation Motivation: Accurate localization for miniature, low-cost AUVs - Testbed to experiment with risky behaviors - Lower the barrier toward multi-auv research - Distributed sensing to capture spatial/temporal variation of ocean processes - Virtual dynamic acoustic arrays Size, power and cost constraints prevent the use of typical INS sensors Inertial navigation quickly diverges using prop. speed and MEMS IMU 1
4 Background - Approach Constrain unbounded growth in localization error using acoustics Standard approach: long baseline (LBL) - Multiple acoustic transponders, two-way travel-time (TWTT) + trilateration - TWTT requires AUV acoustic transmission power hungry, does not scale - Unwieldy to setup 2
5 Background - Approach Constrain unbounded growth in localization error using acoustics Standard approach: long baseline (LBL) - Multiple acoustic transponders, two-way travel-time (TWTT) + trilateration - TWTT requires AUV acoustic transmission power hungry, does not scale - Unwieldy to setup Our approach: one-way travel-time inverted ultra-short baseline (iusbl) - Single acoustic transmitter, inverted USBL receiver calculates range + azimuth from AUV to transmitter - Acoustically passive on AUV localize multiple vehicles with single transmitter 2






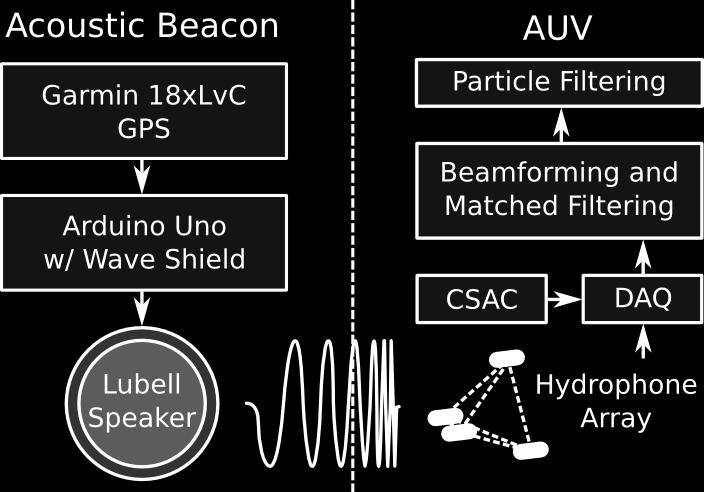

6 System Overview Beacon: all COTS components / AUV + receiver: first prototype mini, very-low cost SandShark AUV from Bluefin Robotics 3
7 System Overview Array Characteristics Tetrahedral array - minimum number of elements to provide near-consistent main lobe beamwidth regardless of acoustic steering angle Increase in frequency narrows main lobe beamwidth but increases sidelobe level 4

 Example")
8 System Overview Array Characteristics Array size constrained by end-plate size, operating frequency selected to balance trade-off between main lobe beamwidth and sidelobe magnitude khz up-chirp selected (within Lubell rated frequency response) Example inwater up-chirp 5


9 Matched Filtering Range Estimation OWTT estimated via matched filtering - i.e. convolution of signal received on each hydrophone with stored up-chirp replica Matched filter output is combined using sum of product of unique pairs and converted to range estimate signal by scaling sample numbers by c/f s range (m) 6



10 inclination (deg) Beamforming Azimuth/Inclination Estimation AUV-beacon azimuth/inclination estimated via phased-array beamforming - i.e. summation of phase-shifted array signals over grid of look-angles Output is 3D array [no. inclinations no. azimuths n] - convert to azimuthinclination heatmap by selecting max n slice 7 azimuth (deg)

11 Acoustics vs. GPS Statistics System implemented with boom-mounted array on WAM-V ASV to allow for range/azimuth comparison against dual-antenna GPS Argmax of range signal and azimuth-inclination heatmap vs GPS statistics indicate std. dev. of ~2.7 m in range and ~6.2 deg in azimuth (lower accuracy bound due to motor noise likely to be better) 8


12 Particle Filter Localization Matched filtering + beamforming + IMU (heading) provide an instantaneous estimate of AUV position Acoustic propagation exhibits properties difficult to counteract multipath, interference result in non-gaussian distributions, measurements are multi-modal Motivate the use of a particle filter/sequential Monte-Carlo fuse range signal and beamformed heatmap with MEMS IMU heading and prop speed 9

13 SandShark Experiments Field experiments in Charles River with Sandshark AUV - Pre-programmed 1200 s mission with AUV running back-and-forth along dock for 70 m - 2 m depth, 1.4 m/s speed, periodic GPS surfacing Real-time onboard self-localization, particle filter solution fed-back to AUV for closed loop control One run included two commercial REMUS LBL acoustic transponders for verification 10


14 SandShark Results Dead-reckoning (black) large jumps upon surfacing, particle filter (green) consistent with GPS, red circles indicate GPS surfacing locations 11
: 5.04 m - PF (mean): 3.")
15 SandShark Results Comparison to commercial LBL (yellow): still subject to acoustic errors/outliers Particle filter has better agreement with LBL than dead-reckoning Difference in trajectory vs. LBL: - DR (mean): 5.04 m - PF (mean): 3.48 m 12

16 Bluefin-21 Preliminary Experiments Identical system has been implemented on our Bluefin-21 AUV Macrura Real-time relative beacon localization can be used for behaviors such as beacon homing useful for under-ice/arctic operations Preliminary experiments in Massachusetts bay ship-mounted beacon used for AUV return-to-ship behavior 13
")
 anchored at ~(-300,")
 range")
17 Bluefin-21 Preliminary Results Inertial navigation (red) DVL-aided INS, ship GPS (green) anchored at ~(-300, -280), particle filter beacon estimate (blue circle) range offset error 14
18 Summary Implementation and demonstration of a single-beacon acoustic navigation system that is - Low cost, easily deployable, and can localize a mini, low-cost AUV without DVL - Passive on the AUV, enabling the localization of multiple vehicles - Performs in real-time on a cheap embedded system - Enables the possibility of new multi-auv behaviors - Beacon homing/following - Multi-AUV surveying and control via a beacon-enabled leader vehicle Future work: Multi-AUV experiments localization of multiple vehicles, behaviors for distributed sampling, coherent acoustic processing 15
One-Way Travel-Time Inverted Ultra-Short Baseline Localization for Low-Cost Autonomous Underwater Vehicles
 One-Way Travel-Time Inverted Ultra-Short Baseline Localization for Low-Cost Autonomous Underwater Vehicles Nicholas R. Rypkema, Erin M. Fischell 2 and Henrik Schmidt 2 Abstract This paper presents an acoustic
One-Way Travel-Time Inverted Ultra-Short Baseline Localization for Low-Cost Autonomous Underwater Vehicles Nicholas R. Rypkema, Erin M. Fischell 2 and Henrik Schmidt 2 Abstract This paper presents an acoustic
Applications of iusbl Technology overview
 Applications of iusbl Technology overview Tom Bennetts Project Manager Summary 1. What is iusbl and its target applications 2. Advantages of iusbl and sample data 3. Technical hurdles and Calibration methods
Applications of iusbl Technology overview Tom Bennetts Project Manager Summary 1. What is iusbl and its target applications 2. Advantages of iusbl and sample data 3. Technical hurdles and Calibration methods
Positioning Small AUVs for Deeper Water Surveys Using Inverted USBL
 Positioning Small AUVs for Deeper Water Surveys Using Inverted USBL Presented at Hydro12, Rotterdam, November 2012 Dr. T.M. Hiller, thiller@teledyne.com Overview Introduction to Gavia AUV Gavia Acoustic
Positioning Small AUVs for Deeper Water Surveys Using Inverted USBL Presented at Hydro12, Rotterdam, November 2012 Dr. T.M. Hiller, thiller@teledyne.com Overview Introduction to Gavia AUV Gavia Acoustic
Cooperative AUV Navigation using MOOS: MLBL Maurice Fallon and John Leonard
 Cooperative AUV Navigation using MOOS: MLBL Maurice Fallon and John Leonard Cooperative ASV/AUV Navigation AUV Navigation is not error bounded: Even with a $300k RLG, error will accumulate GPS and Radio
Cooperative AUV Navigation using MOOS: MLBL Maurice Fallon and John Leonard Cooperative ASV/AUV Navigation AUV Navigation is not error bounded: Even with a $300k RLG, error will accumulate GPS and Radio
PHINS, An All-In-One Sensor for DP Applications
 DYNAMIC POSITIONING CONFERENCE September 28-30, 2004 Sensors PHINS, An All-In-One Sensor for DP Applications Yves PATUREL IXSea (Marly le Roi, France) ABSTRACT DP positioning sensors are mainly GPS receivers
DYNAMIC POSITIONING CONFERENCE September 28-30, 2004 Sensors PHINS, An All-In-One Sensor for DP Applications Yves PATUREL IXSea (Marly le Roi, France) ABSTRACT DP positioning sensors are mainly GPS receivers
Hybrid system using both USBL and LBL for shallow waters
 OI2013 Underwater Positioning & Communication Hybrid system using both USBL and LBL for shallow waters Nicolas LARUELLE Sales Manager at OSEAN September 4th,2013 OI2013 Page 1 OVERVIEW SPECIFICATIONS PRINCIPLES
OI2013 Underwater Positioning & Communication Hybrid system using both USBL and LBL for shallow waters Nicolas LARUELLE Sales Manager at OSEAN September 4th,2013 OI2013 Page 1 OVERVIEW SPECIFICATIONS PRINCIPLES
Experimental Validation of the Moving Long Base-Line Navigation Concept
 Experimental Validation of the Moving Long Base-Line Navigation Concept Jérôme Vaganay (1), John J. Leonard (2), Joseph A. Curcio (2), J. Scott Willcox (1) (1) Bluefin Robotics Corporation 237 Putnam Avenue
Experimental Validation of the Moving Long Base-Line Navigation Concept Jérôme Vaganay (1), John J. Leonard (2), Joseph A. Curcio (2), J. Scott Willcox (1) (1) Bluefin Robotics Corporation 237 Putnam Avenue
global acoustic positioning system GAPS usbl acoustic with integrated INS positioning system Ixsea Oceano GAPS page 1
 global acoustic positioning system usbl acoustic positioning system with integrated INS positioning system page 1 THE MERGER OF INERTIAL AND UNDERWATER ACOUSTIC TECHNOLOGIES is a unique Global Acoustic
global acoustic positioning system usbl acoustic positioning system with integrated INS positioning system page 1 THE MERGER OF INERTIAL AND UNDERWATER ACOUSTIC TECHNOLOGIES is a unique Global Acoustic
Autonomous Underwater Vehicle Navigation.
 Autonomous Underwater Vehicle Navigation. We are aware that electromagnetic energy cannot propagate appreciable distances in the ocean except at very low frequencies. As a result, GPS-based and other such
Autonomous Underwater Vehicle Navigation. We are aware that electromagnetic energy cannot propagate appreciable distances in the ocean except at very low frequencies. As a result, GPS-based and other such
Underwater Acoustic Communication and Positioning State of the Art and New Uses
 Underwater Acoustic Communication and Positioning State of the Art and New Uses Radio signals Work only on very short distances Salty water particularly problematic No underwater GPS Cables Too heavy,
Underwater Acoustic Communication and Positioning State of the Art and New Uses Radio signals Work only on very short distances Salty water particularly problematic No underwater GPS Cables Too heavy,
Autonomous Underwater Vehicles
 Autonomous Underwater Vehicles New Autonomous Underwater Vehicle technology development at WHOI to support the growing needs of scientific, commercial and military undersea search and survey operations
Autonomous Underwater Vehicles New Autonomous Underwater Vehicle technology development at WHOI to support the growing needs of scientific, commercial and military undersea search and survey operations
USBL positioning and communication systems. Applications
 USBL positioning and communication systems Offering a powerful USBL transceiver functionality with full benefits of an S2C technology communication link Applications Positioning of offshore equipment >
USBL positioning and communication systems Offering a powerful USBL transceiver functionality with full benefits of an S2C technology communication link Applications Positioning of offshore equipment >
WORLD CLASS through people, technology and dedication
 WORLD CLASS through people, technology and dedication WORLD CLASS through people, technology and dedication 1 2 Acoustic Positioning Systems Hydrofest Robert Gordon University Scott Sutherland Building
WORLD CLASS through people, technology and dedication WORLD CLASS through people, technology and dedication 1 2 Acoustic Positioning Systems Hydrofest Robert Gordon University Scott Sutherland Building
Survey Sensors. 18/04/2018 Danny Wake Group Surveyor i-tech Services
 Survey Sensors 18/04/2018 Danny Wake Group Surveyor i-tech Services What do we need sensors for? For pure hydrographic surveying: Depth measurements Hazard identification Seabed composition Tides & currents
Survey Sensors 18/04/2018 Danny Wake Group Surveyor i-tech Services What do we need sensors for? For pure hydrographic surveying: Depth measurements Hazard identification Seabed composition Tides & currents
Experiences with Hydrographic Data Budgets Using a Low-logistics AUV Platform. Thomas Hiller Teledyne Marine Systems
 Experiences with Hydrographic Data Budgets Using a Low-logistics AUV Platform Thomas Hiller Teledyne Marine Systems 1 Teledyne Marine Systems Strategic Business Units 2 What is the Gavia? The Gavia is
Experiences with Hydrographic Data Budgets Using a Low-logistics AUV Platform Thomas Hiller Teledyne Marine Systems 1 Teledyne Marine Systems Strategic Business Units 2 What is the Gavia? The Gavia is
Ranger USBL Acoustic Positioning System for DP Reference and Survey
 Acoustic Positioning System for DP Reference and Survey cc 545000m N 544990m 544980m 544970m 6027910m 6027900m W 6027890m 6027880m S Contents Introduction 01 Ranger USBL System Overview 02 Ranger USBL
Acoustic Positioning System for DP Reference and Survey cc 545000m N 544990m 544980m 544970m 6027910m 6027900m W 6027890m 6027880m S Contents Introduction 01 Ranger USBL System Overview 02 Ranger USBL
Hydroacoustic Aided Inertial Navigation System - HAIN A New Reference for DP
 Return to Session Directory Return to Session Directory Doug Phillips Failure is an Option DYNAMIC POSITIONING CONFERENCE October 9-10, 2007 Sensors Hydroacoustic Aided Inertial Navigation System - HAIN
Return to Session Directory Return to Session Directory Doug Phillips Failure is an Option DYNAMIC POSITIONING CONFERENCE October 9-10, 2007 Sensors Hydroacoustic Aided Inertial Navigation System - HAIN
Navigation of an Autonomous Underwater Vehicle in a Mobile Network
 Navigation of an Autonomous Underwater Vehicle in a Mobile Network Nuno Santos, Aníbal Matos and Nuno Cruz Faculdade de Engenharia da Universidade do Porto Instituto de Sistemas e Robótica - Porto Rua
Navigation of an Autonomous Underwater Vehicle in a Mobile Network Nuno Santos, Aníbal Matos and Nuno Cruz Faculdade de Engenharia da Universidade do Porto Instituto de Sistemas e Robótica - Porto Rua
Virtual Long Baseline (VLBL) autonomous underwater vehicle navigation using a single transponder
 autonomous underwater vehicle navigation using a single transponder") Calhoun: The NPS Institutional Archive DSpace Repository Theses and Dissertations Thesis and Dissertation Collection 2006-06 Virtual Long Baseline (VLBL) autonomous underwater vehicle navigation using
Calhoun: The NPS Institutional Archive DSpace Repository Theses and Dissertations Thesis and Dissertation Collection 2006-06 Virtual Long Baseline (VLBL) autonomous underwater vehicle navigation using
TORSTEIN PEDERSEN. Improving the Common DVL: A New Standard in Doppler Velocity Logs
 TORSTEIN PEDERSEN Improving the Common DVL: A New Standard in Doppler Velocity Logs VOLVO OCEAN RACE 2011 Precursor to Nortek s DVL story Nortek Background for DVLs Technology Company with expertise in
TORSTEIN PEDERSEN Improving the Common DVL: A New Standard in Doppler Velocity Logs VOLVO OCEAN RACE 2011 Precursor to Nortek s DVL story Nortek Background for DVLs Technology Company with expertise in
INS for life of field
 INS for life of field Mark Carter Business Development Manager : Inertial Oceanology 2012 Positioning Requirements Drilling Construction Pipe Lay IRM Decommissioning Rig DP (Dual Redundant) Site Survey
INS for life of field Mark Carter Business Development Manager : Inertial Oceanology 2012 Positioning Requirements Drilling Construction Pipe Lay IRM Decommissioning Rig DP (Dual Redundant) Site Survey
Modeling and Evaluation of Bi-Static Tracking In Very Shallow Water
 Modeling and Evaluation of Bi-Static Tracking In Very Shallow Water Stewart A.L. Glegg Dept. of Ocean Engineering Florida Atlantic University Boca Raton, FL 33431 Tel: (954) 924 7241 Fax: (954) 924-7270
Modeling and Evaluation of Bi-Static Tracking In Very Shallow Water Stewart A.L. Glegg Dept. of Ocean Engineering Florida Atlantic University Boca Raton, FL 33431 Tel: (954) 924 7241 Fax: (954) 924-7270
AUV Navigation and Localization - A Review
 1 AUV Navigation and Localization - A Review Liam Paull, Sajad Saeedi, Mae Seto and Howard Li Abstract Autonomous underwater vehicle (AUV) navigation and localization in underwater environments is particularly
1 AUV Navigation and Localization - A Review Liam Paull, Sajad Saeedi, Mae Seto and Howard Li Abstract Autonomous underwater vehicle (AUV) navigation and localization in underwater environments is particularly
MULTIPATH EFFECT ON DPCA MICRONAVIGATION OF A SYNTHETIC APERTURE SONAR
 MULTIPATH EFFECT ON DPCA MICRONAVIGATION OF A SYNTHETIC APERTURE SONAR L. WANG, G. DAVIES, A. BELLETTINI AND M. PINTO SACLANT Undersea Research Centre, Viale San Bartolomeo 400, 19138 La Spezia, Italy
MULTIPATH EFFECT ON DPCA MICRONAVIGATION OF A SYNTHETIC APERTURE SONAR L. WANG, G. DAVIES, A. BELLETTINI AND M. PINTO SACLANT Undersea Research Centre, Viale San Bartolomeo 400, 19138 La Spezia, Italy
Utilizing Batch Processing for GNSS Signal Tracking
 Utilizing Batch Processing for GNSS Signal Tracking Andrey Soloviev Avionics Engineering Center, Ohio University Presented to: ION Alberta Section, Calgary, Canada February 27, 2007 Motivation: Outline
Utilizing Batch Processing for GNSS Signal Tracking Andrey Soloviev Avionics Engineering Center, Ohio University Presented to: ION Alberta Section, Calgary, Canada February 27, 2007 Motivation: Outline
IEEE JOURNAL OF OCEANIC ENGINEERING 1. Cooperative Path Planning for Range-Only Localization Using a Single Moving Beacon
 IEEE JOURNAL OF OCEANIC ENGINEERING 1 Cooperative Path Planning for Range-Only Localization Using a Single Moving Beacon Yew Teck Tan, Rui Gao, and Mandar Chitre Abstract Underwater navigation that relies
IEEE JOURNAL OF OCEANIC ENGINEERING 1 Cooperative Path Planning for Range-Only Localization Using a Single Moving Beacon Yew Teck Tan, Rui Gao, and Mandar Chitre Abstract Underwater navigation that relies
WORLD CLASS through people, technology and dedication WORLD CLASS through people, technology and dedication
 WORLD CLASS through people, technology and dedication WORLD CLASS through people, technology and dedication 1 2 Acoustic Positioning Systems Hydrofest Aberdeen University Wednesday 31 st March Ian Florence
WORLD CLASS through people, technology and dedication WORLD CLASS through people, technology and dedication 1 2 Acoustic Positioning Systems Hydrofest Aberdeen University Wednesday 31 st March Ian Florence
As a first approach, the details of how to implement a common nonparametric
 Chapter 3 3D EKF-SLAM Delayed initialization As a first approach, the details of how to implement a common nonparametric Bayesian filter for the simultaneous localization and mapping (SLAM) problem is
Chapter 3 3D EKF-SLAM Delayed initialization As a first approach, the details of how to implement a common nonparametric Bayesian filter for the simultaneous localization and mapping (SLAM) problem is
Cooperative AUV Navigation using a Single Surface Craft
 Cooperative AUV Navigation using a Single Surface Craft Maurice F. Fallon, Georgios Papadopoulos and John J. Leonard Abstract Maintaining accurate localization of an autonomous underwater vehicle (AUV)
Cooperative AUV Navigation using a Single Surface Craft Maurice F. Fallon, Georgios Papadopoulos and John J. Leonard Abstract Maintaining accurate localization of an autonomous underwater vehicle (AUV)
Physics-based Simulation Environment for Adaptive and Collaborative Marine Sensing with MOOS-IvP
 Physics-based Simulation Environment for Adaptive and Collaborative Marine Sensing with MOOS-IvP Prof. Henrik Schmidt Laboratory for Autonomous Marine Sensing Systems Massachusetts Institute of technology
Physics-based Simulation Environment for Adaptive and Collaborative Marine Sensing with MOOS-IvP Prof. Henrik Schmidt Laboratory for Autonomous Marine Sensing Systems Massachusetts Institute of technology
ACOUSTIC TRACKING OF AN UNMANNED UNDERWATER VEHICLE USING A PASSIVE ULTRASHORT BASELINE ARRAY AND A SINGLE LONG BASELINE BEACON. Kyle L.
 ACOUSTIC TRACKING OF AN UNMANNED UNDERWATER VEHICLE USING A PASSIVE ULTRASHORT BASELINE ARRAY AND A SINGLE LONG BASELINE BEACON by Kyle L. Seaton A Thesis Submitted to the Faculty of The College of Engineering
ACOUSTIC TRACKING OF AN UNMANNED UNDERWATER VEHICLE USING A PASSIVE ULTRASHORT BASELINE ARRAY AND A SINGLE LONG BASELINE BEACON by Kyle L. Seaton A Thesis Submitted to the Faculty of The College of Engineering
Agenda Motivation Systems and Sensors Algorithms Implementation Conclusion & Outlook
 Overview of Current Indoor Navigation Techniques and Implementation Studies FIG ww 2011 - Marrakech and Christian Lukianto HafenCity University Hamburg 21 May 2011 1 Agenda Motivation Systems and Sensors
Overview of Current Indoor Navigation Techniques and Implementation Studies FIG ww 2011 - Marrakech and Christian Lukianto HafenCity University Hamburg 21 May 2011 1 Agenda Motivation Systems and Sensors
NASNet DPR: NASNet as a Deepwater Acoustic DP Position Reference
 NAUTRONIX MARINE TECHNOLOGY SOLUTIONS NASNet DPR: NASNet as a Deepwater Acoustic DP Position Reference Aberdeen Houston Rio Overview Offshore positioning introduction Considerations of acoustic positioning
NAUTRONIX MARINE TECHNOLOGY SOLUTIONS NASNet DPR: NASNet as a Deepwater Acoustic DP Position Reference Aberdeen Houston Rio Overview Offshore positioning introduction Considerations of acoustic positioning
Jim Kaba, Shunguang Wu, Siun-Chuon Mau, Tao Zhao Sarnoff Corporation Briefed By: Jim Kaba (609)
") Collaborative Effects of Distributed Multimodal Sensor Fusion for First Responder Navigation Jim Kaba, Shunguang Wu, Siun-Chuon Mau, Tao Zhao Sarnoff Corporation Briefed By: Jim Kaba (69) 734-2246 jkaba@sarnoff.com
Collaborative Effects of Distributed Multimodal Sensor Fusion for First Responder Navigation Jim Kaba, Shunguang Wu, Siun-Chuon Mau, Tao Zhao Sarnoff Corporation Briefed By: Jim Kaba (69) 734-2246 jkaba@sarnoff.com
DP MAINTENANCE INTRODUC INTR TION T TION O SENS T OR O SENS S OR
 DP MAINTENANCE INTRODUCTION TO SENSORS Sensors Wind Sensors PMEs Workstations Gyrocompasses Network Switchbox Network Switchbox Controller Cabinets Dual Ethernet Motion Sensors (VRU) Field Stations Thrusters
DP MAINTENANCE INTRODUCTION TO SENSORS Sensors Wind Sensors PMEs Workstations Gyrocompasses Network Switchbox Network Switchbox Controller Cabinets Dual Ethernet Motion Sensors (VRU) Field Stations Thrusters
The Evolution of Nano-Satellite Proximity Operations In-Space Inspection Workshop 2017
 The Evolution of Nano-Satellite Proximity Operations 02-01-2017 In-Space Inspection Workshop 2017 Tyvak Introduction We develop miniaturized custom spacecraft, launch solutions, and aerospace technologies
The Evolution of Nano-Satellite Proximity Operations 02-01-2017 In-Space Inspection Workshop 2017 Tyvak Introduction We develop miniaturized custom spacecraft, launch solutions, and aerospace technologies
Progress Report. Mohammadtaghi G. Poshtmashhadi. Supervisor: Professor António M. Pascoal
 Progress Report Mohammadtaghi G. Poshtmashhadi Supervisor: Professor António M. Pascoal OceaNet meeting presentation April 2017 2 Work program Main Research Topic Autonomous Marine Vehicle Control and
Progress Report Mohammadtaghi G. Poshtmashhadi Supervisor: Professor António M. Pascoal OceaNet meeting presentation April 2017 2 Work program Main Research Topic Autonomous Marine Vehicle Control and
USBL positioning and communication SyStEmS. product information GUidE
 USBL positioning and communication SyStEmS product information GUidE evologics s2c R usbl - series underwater positioning and communication systems EvoLogics S2CR USBL is a series of combined positioning
USBL positioning and communication SyStEmS product information GUidE evologics s2c R usbl - series underwater positioning and communication systems EvoLogics S2CR USBL is a series of combined positioning
Passive Mobile Robot Localization within a Fixed Beacon Field. Carrick Detweiler
 Passive Mobile Robot Localization within a Fixed Beacon Field by Carrick Detweiler Submitted to the Department of Electrical Engineering and Computer Science in partial fulfillment of the requirements
Passive Mobile Robot Localization within a Fixed Beacon Field by Carrick Detweiler Submitted to the Department of Electrical Engineering and Computer Science in partial fulfillment of the requirements
Inertial Sensors. Ellipse Series MINIATURE HIGH PERFORMANCE. Navigation, Motion & Heave Sensing IMU AHRS MRU INS VG
 Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.2 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.2 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
A Shallow Water Acoustic Network for Mine Countermeasures Operations with Autonomous Underwater Vehicles
 A Shallow Water Acoustic Network for Mine Countermeasures Operations with Autonomous Underwater Vehicles Lee Freitag, Matthew Grund, Chris von Alt, Roger Stokey and Thomas Austin Woods Hole Oceanographic
A Shallow Water Acoustic Network for Mine Countermeasures Operations with Autonomous Underwater Vehicles Lee Freitag, Matthew Grund, Chris von Alt, Roger Stokey and Thomas Austin Woods Hole Oceanographic
Inertial Systems. Ekinox Series TACTICAL GRADE MEMS. Motion Sensing & Navigation IMU AHRS MRU INS VG
 Ekinox Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.05 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE EKINOX SERIES R&D specialists usually compromise between high
Ekinox Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.05 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE EKINOX SERIES R&D specialists usually compromise between high
Multiple-Vehicle Resource-Constrained Navigation in the Deep Ocean. Brooks Louis-Kiguchi Reed
 Multiple-Vehicle Resource-Constrained Navigation in the Deep Ocean by Brooks Louis-Kiguchi Reed S.B., Massachusetts Institute of Technology (2009) Submitted to the Joint Program in Applied Ocean Science
Multiple-Vehicle Resource-Constrained Navigation in the Deep Ocean by Brooks Louis-Kiguchi Reed S.B., Massachusetts Institute of Technology (2009) Submitted to the Joint Program in Applied Ocean Science
Inertial Navigation System
 Apogee Series ULTIMATE ACCURACY MEMS Inertial Navigation System INS MRU AHRS ITAR Free 0.005 RMS Motion Sensing & Georeferencing APOGEE SERIES makes high accuracy affordable for all surveying companies.
Apogee Series ULTIMATE ACCURACY MEMS Inertial Navigation System INS MRU AHRS ITAR Free 0.005 RMS Motion Sensing & Georeferencing APOGEE SERIES makes high accuracy affordable for all surveying companies.
Acoustic INS aiding NASNet & PHINS
 NAUTRONIX MARINE TECHNOLOGY SOLUTIONS Acoustic INS aiding NASNet & PHINS Sam Hanton Aberdeen Houston Rio Positioning Options Satellites GPS, GLONASS, COMPASS Acoustics LBL, SBL, USBL Relative sensors Laser
NAUTRONIX MARINE TECHNOLOGY SOLUTIONS Acoustic INS aiding NASNet & PHINS Sam Hanton Aberdeen Houston Rio Positioning Options Satellites GPS, GLONASS, COMPASS Acoustics LBL, SBL, USBL Relative sensors Laser
The Oil & Gas Industry Requirements for Marine Robots of the 21st century
 The Oil & Gas Industry Requirements for Marine Robots of the 21st century www.eninorge.no Laura Gallimberti 20.06.2014 1 Outline Introduction: fast technology growth Overview underwater vehicles development
The Oil & Gas Industry Requirements for Marine Robots of the 21st century www.eninorge.no Laura Gallimberti 20.06.2014 1 Outline Introduction: fast technology growth Overview underwater vehicles development
Pocket Passive SONAR
 Pocket Passive SONAR Jacob Easterling, Eric M. Schwartz Department of Electrical and Computer Engineering University of Florida 571 Gale Lemerand Drive Gainesville, Florida 32611 jeasterling@ufl.edu, ems@ufl.edu
Pocket Passive SONAR Jacob Easterling, Eric M. Schwartz Department of Electrical and Computer Engineering University of Florida 571 Gale Lemerand Drive Gainesville, Florida 32611 jeasterling@ufl.edu, ems@ufl.edu
Tightly Integrated Second Generation Acoustic-Inertial Position Reference Systems
 Return to Session Menu DYNAMIC POSITIONING CONFERENCE October 15-16, 2013 SENSORS SESSION II Tightly Integrated Second Generation Acoustic-Inertial Position Reference Systems Mark Carter Sonardyne International
Return to Session Menu DYNAMIC POSITIONING CONFERENCE October 15-16, 2013 SENSORS SESSION II Tightly Integrated Second Generation Acoustic-Inertial Position Reference Systems Mark Carter Sonardyne International
SUB-SEABED MAPPING USING AUV-BASED MULTI-STATIC ACOUSTIC SENSING AND ADAPTIVE CONTROL
 SUB-SEABED MAPPING USING AUV-BASED MULTI-STATIC ACOUSTIC SENSING AND ADAPTIVE CONTROL H. SCHMIDT, J. LEONARD, J.R. EDWARDS AND T-C. LIU Massachusetts Institute of Technology, 77 Massachusetts Avenue, Cambridge
SUB-SEABED MAPPING USING AUV-BASED MULTI-STATIC ACOUSTIC SENSING AND ADAPTIVE CONTROL H. SCHMIDT, J. LEONARD, J.R. EDWARDS AND T-C. LIU Massachusetts Institute of Technology, 77 Massachusetts Avenue, Cambridge
A Course on Marine Robotic Systems: Theory to Practice. Full Programme
 A Course on Marine Robotic Systems: Theory to Practice 27-31 January, 2015 National Institute of Oceanography, Dona Paula, Goa Opening address by the Director of NIO Full Programme 1. Introduction and
A Course on Marine Robotic Systems: Theory to Practice 27-31 January, 2015 National Institute of Oceanography, Dona Paula, Goa Opening address by the Director of NIO Full Programme 1. Introduction and
Assessing & Mitigation of risks on railways operational scenarios
 R H I N O S Railway High Integrity Navigation Overlay System Assessing & Mitigation of risks on railways operational scenarios Rome, June 22 nd 2017 Anja Grosch, Ilaria Martini, Omar Garcia Crespillo (DLR)
R H I N O S Railway High Integrity Navigation Overlay System Assessing & Mitigation of risks on railways operational scenarios Rome, June 22 nd 2017 Anja Grosch, Ilaria Martini, Omar Garcia Crespillo (DLR)
CODEVINTEC. Miniature and accurate IMU, AHRS, INS/GNSS Attitude and Heading Reference Systems
 45 27 39.384 N 9 07 30.145 E Miniature and accurate IMU, AHRS, INS/GNSS Attitude and Heading Reference Systems Aerospace Land/Automotive Marine Subsea Miniature inertial sensors 0.1 Ellipse Series New
45 27 39.384 N 9 07 30.145 E Miniature and accurate IMU, AHRS, INS/GNSS Attitude and Heading Reference Systems Aerospace Land/Automotive Marine Subsea Miniature inertial sensors 0.1 Ellipse Series New
TECHNOLOGY DEVELOPMENT AREAS IN AAWA
 TECHNOLOGY DEVELOPMENT AREAS IN AAWA Technologies for realizing remote and autonomous ships exist. The task is to find the optimum way to combine them reliably and cost effecticely. Ship state definition
TECHNOLOGY DEVELOPMENT AREAS IN AAWA Technologies for realizing remote and autonomous ships exist. The task is to find the optimum way to combine them reliably and cost effecticely. Ship state definition
Teledyne Marine Acoustic Imagining
 RESON SeaBat high performance sonars for long range object detection and MCM applications Navigation, object avoidance & up close inspection with BlueView Greg Probst Sales Manager, Defense Teledyne Marine
RESON SeaBat high performance sonars for long range object detection and MCM applications Navigation, object avoidance & up close inspection with BlueView Greg Probst Sales Manager, Defense Teledyne Marine
08/10/2013. Marine Positioning Systems Surface and Underwater Positioning. egm502 seafloor mapping
 egm502 seafloor mapping lecture 8 navigation and positioning Marine Positioning Systems Surface and Underwater Positioning All observations at sea need to be related to a geographical position. To precisely
egm502 seafloor mapping lecture 8 navigation and positioning Marine Positioning Systems Surface and Underwater Positioning All observations at sea need to be related to a geographical position. To precisely
Adaptive SAR Results with the LiMIT Testbed
 Adaptive SAR Results with the LiMIT Testbed Gerald Benitz Adaptive Sensor Array Processing Workshop 7 June 2005 999999-1 Outline LiMIT collection platform SAR sidelobe recovery Electronic Protection (EP)
Adaptive SAR Results with the LiMIT Testbed Gerald Benitz Adaptive Sensor Array Processing Workshop 7 June 2005 999999-1 Outline LiMIT collection platform SAR sidelobe recovery Electronic Protection (EP)
Inertial Navigation System
 Apogee Marine Series ULTIMATE ACCURACY MEMS Inertial Navigation System INS MRU AHRS ITAR Free 0.005 RMS Navigation, Motion & Heave Sensing APOGEE SERIES makes high accuracy affordable for all surveying
Apogee Marine Series ULTIMATE ACCURACY MEMS Inertial Navigation System INS MRU AHRS ITAR Free 0.005 RMS Navigation, Motion & Heave Sensing APOGEE SERIES makes high accuracy affordable for all surveying
NAVIGATION OF MOBILE ROBOTS
 MOBILE ROBOTICS course NAVIGATION OF MOBILE ROBOTS Maria Isabel Ribeiro Pedro Lima mir@isr.ist.utl.pt pal@isr.ist.utl.pt Instituto Superior Técnico (IST) Instituto de Sistemas e Robótica (ISR) Av.Rovisco
MOBILE ROBOTICS course NAVIGATION OF MOBILE ROBOTS Maria Isabel Ribeiro Pedro Lima mir@isr.ist.utl.pt pal@isr.ist.utl.pt Instituto Superior Técnico (IST) Instituto de Sistemas e Robótica (ISR) Av.Rovisco
Chapter - 1 PART - A GENERAL INTRODUCTION
 Chapter - 1 PART - A GENERAL INTRODUCTION This chapter highlights the literature survey on the topic of resynthesis of array antennas stating the objective of the thesis and giving a brief idea on how
Chapter - 1 PART - A GENERAL INTRODUCTION This chapter highlights the literature survey on the topic of resynthesis of array antennas stating the objective of the thesis and giving a brief idea on how
Inertial Sensors. Ellipse Series MINIATURE HIGH PERFORMANCE. Navigation, Motion & Heave Sensing IMU AHRS MRU INS VG
 Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
PRINCIPLE OF SEISMIC SURVEY
 PRINCIPLE OF SEISMIC SURVEY MARINE INSTITUTE Galway, Ireland 29th April 2016 Laurent MATTIO Contents 2 Principle of seismic survey Objective of seismic survey Acquisition chain Wave propagation Different
PRINCIPLE OF SEISMIC SURVEY MARINE INSTITUTE Galway, Ireland 29th April 2016 Laurent MATTIO Contents 2 Principle of seismic survey Objective of seismic survey Acquisition chain Wave propagation Different
AN AIDED NAVIGATION POST PROCESSING FILTER FOR DETAILED SEABED MAPPING UUVS
 MODELING, IDENTIFICATION AND CONTROL, 1999, VOL. 20, NO. 3, 165-175 doi: 10.4173/mic.1999.3.2 AN AIDED NAVIGATION POST PROCESSING FILTER FOR DETAILED SEABED MAPPING UUVS Kenneth Gade and Bjørn Jalving
MODELING, IDENTIFICATION AND CONTROL, 1999, VOL. 20, NO. 3, 165-175 doi: 10.4173/mic.1999.3.2 AN AIDED NAVIGATION POST PROCESSING FILTER FOR DETAILED SEABED MAPPING UUVS Kenneth Gade and Bjørn Jalving
MarineSIM : Robot Simulation for Marine Environments
 MarineSIM : Robot Simulation for Marine Environments P.G.C.Namal Senarathne, Wijerupage Sardha Wijesoma,KwangWeeLee, Bharath Kalyan, Moratuwage M.D.P, Nicholas M. Patrikalakis, Franz S. Hover School of
MarineSIM : Robot Simulation for Marine Environments P.G.C.Namal Senarathne, Wijerupage Sardha Wijesoma,KwangWeeLee, Bharath Kalyan, Moratuwage M.D.P, Nicholas M. Patrikalakis, Franz S. Hover School of
A 3D, FORWARD-LOOKING, PHASED ARRAY, OBSTACLE AVOIDANCE SONAR FOR AUTONOMOUS UNDERWATER VEHICLES
 A 3D, FORWARD-LOOKING, PHASED ARRAY, OBSTACLE AVOIDANCE SONAR FOR AUTONOMOUS UNDERWATER VEHICLES Matthew J. Zimmerman Vice President of Engineering FarSounder, Inc. 95 Hathaway Center, Providence, RI 02907
A 3D, FORWARD-LOOKING, PHASED ARRAY, OBSTACLE AVOIDANCE SONAR FOR AUTONOMOUS UNDERWATER VEHICLES Matthew J. Zimmerman Vice President of Engineering FarSounder, Inc. 95 Hathaway Center, Providence, RI 02907
Report on Extended Kalman Filter Simulation Experiments
 Report on Extended Kalman Filter Simulation Experiments Aeronautical Engineering 551 Integrated Navigation and Guidance Systems Chad R. Frost December 6, 1997 Introduction This report describes my experiments
Report on Extended Kalman Filter Simulation Experiments Aeronautical Engineering 551 Integrated Navigation and Guidance Systems Chad R. Frost December 6, 1997 Introduction This report describes my experiments
Undersea Communications
 Smart Super Vehicles Undersea Communications This material is based upon work supported by the Assistant Secretary of Defense for Research and Engineering under Air Force Contract No. FA8721-05-C-0002
Smart Super Vehicles Undersea Communications This material is based upon work supported by the Assistant Secretary of Defense for Research and Engineering under Air Force Contract No. FA8721-05-C-0002
Subsea Positioning In deep water
 Subsea Positioning In deep water PETRONAS - PETRAD - INTSOK CCOP DEEPWATER SUBSEA TIE-BACK Damai Puri Resort & Spa, Kuching, Sarawak, MALAYSIA 24TH - 26TH January, 2011 Supplier to the oil & gas industry
Subsea Positioning In deep water PETRONAS - PETRAD - INTSOK CCOP DEEPWATER SUBSEA TIE-BACK Damai Puri Resort & Spa, Kuching, Sarawak, MALAYSIA 24TH - 26TH January, 2011 Supplier to the oil & gas industry
Author s Name Name of the Paper Session. PDynamic. Positioning Committee. Marine Technology Society
 Author s Name Name of the Paper Session PDynamic Positioning Committee Marine Technology Society DYNAMIC POSITIONING CONFERENCE September 17-18, 2002 Acoustic Positioning Flexible Acoustic Positioning
Author s Name Name of the Paper Session PDynamic Positioning Committee Marine Technology Society DYNAMIC POSITIONING CONFERENCE September 17-18, 2002 Acoustic Positioning Flexible Acoustic Positioning
Satellite and Inertial Attitude. A presentation by Dan Monroe and Luke Pfister Advised by Drs. In Soo Ahn and Yufeng Lu
 Satellite and Inertial Attitude and Positioning System A presentation by Dan Monroe and Luke Pfister Advised by Drs. In Soo Ahn and Yufeng Lu Outline Project Introduction Theoretical Background Inertial
Satellite and Inertial Attitude and Positioning System A presentation by Dan Monroe and Luke Pfister Advised by Drs. In Soo Ahn and Yufeng Lu Outline Project Introduction Theoretical Background Inertial
A Precise Underwater Acoustic Positioning Method Based on Phase Measurement
 A Precise Underwater Acoustic Positioning Method Based on Phase Measurement by Li Zhou B. Eng., Northwestern Polytechnical University, 1996 M. Eng., Northwestern Polytechnical University, 1999 A Thesis
A Precise Underwater Acoustic Positioning Method Based on Phase Measurement by Li Zhou B. Eng., Northwestern Polytechnical University, 1996 M. Eng., Northwestern Polytechnical University, 1999 A Thesis
Wireless Localization Techniques CS441
 Wireless Localization Techniques CS441 Variety of Applications Two applications: Passive habitat monitoring: Where is the bird? What kind of bird is it? Asset tracking: Where is the projector? Why is it
Wireless Localization Techniques CS441 Variety of Applications Two applications: Passive habitat monitoring: Where is the bird? What kind of bird is it? Asset tracking: Where is the projector? Why is it
Robots at Work The growing role of robotic systems in the Oceans and Subsea Engineering. David Brookes Senior Advisor, Upstream Engineering, BP
 Robots at Work The growing role of robotic systems in the Oceans and Subsea Engineering David Brookes Senior Advisor, Upstream Engineering, BP Synopsis ROV s History Current Capabilities and Examples AUV
Robots at Work The growing role of robotic systems in the Oceans and Subsea Engineering David Brookes Senior Advisor, Upstream Engineering, BP Synopsis ROV s History Current Capabilities and Examples AUV
Sensor-based Motion Planning for MCM Teams. by Sean Kragelund Center for Autonomous Vehicle Research (CAVR)
") Sensor-based Motion Planning for MCM Teams by Sean Kragelund Center for Autonomous Vehicle Research (CAVR) October 5, 2015 Sensor-based Planning GOAL: optimize some mission objective Max. information gain
Sensor-based Motion Planning for MCM Teams by Sean Kragelund Center for Autonomous Vehicle Research (CAVR) October 5, 2015 Sensor-based Planning GOAL: optimize some mission objective Max. information gain
Low cost underwater acoustic localization. Eduardo Iscar, Atulya Shree, Nicholas Goumas, and Matthew Johnson-Roberson
 Low cost underwater acoustic localization Eduardo Iscar, Atulya Shree, Nicholas Goumas, and Matthew Johnson-Roberson University of Michigan Department of Naval Architecture and Marine Engineering 2600
Low cost underwater acoustic localization Eduardo Iscar, Atulya Shree, Nicholas Goumas, and Matthew Johnson-Roberson University of Michigan Department of Naval Architecture and Marine Engineering 2600
Sponsored by. Nisarg Kothari Carnegie Mellon University April 26, 2011
 Sponsored by Nisarg Kothari Carnegie Mellon University April 26, 2011 Motivation Why indoor localization? Navigating malls, airports, office buildings Museum tours, context aware apps Augmented reality
Sponsored by Nisarg Kothari Carnegie Mellon University April 26, 2011 Motivation Why indoor localization? Navigating malls, airports, office buildings Museum tours, context aware apps Augmented reality
Summary. Methodology. Selected field examples of the system included. A description of the system processing flow is outlined in Figure 2.
 Halvor Groenaas*, Svein Arne Frivik, Aslaug Melbø, Morten Svendsen, WesternGeco Summary In this paper, we describe a novel method for passive acoustic monitoring of marine mammals using an existing streamer
Halvor Groenaas*, Svein Arne Frivik, Aslaug Melbø, Morten Svendsen, WesternGeco Summary In this paper, we describe a novel method for passive acoustic monitoring of marine mammals using an existing streamer
USBL POSITIONING SYSTEM: IMPLEMENTATION AND TESTS AT SEA
 USBL POSITIONING SYSTEM: IMPLEMENTATION AND TESTS AT SEA J. Picão, M. Morgado, P. Oliveira, C. Silvestre 1 IST - Instituto Superior Técnico ISR - Institute for Systems and Robotics Av. Rovisco Pais, 1,
USBL POSITIONING SYSTEM: IMPLEMENTATION AND TESTS AT SEA J. Picão, M. Morgado, P. Oliveira, C. Silvestre 1 IST - Instituto Superior Técnico ISR - Institute for Systems and Robotics Av. Rovisco Pais, 1,
Integrated Navigation System
 Integrated Navigation System Adhika Lie adhika@aem.umn.edu AEM 5333: Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles Feb 14, 2013 1 Navigation System Where am I? Position,
Integrated Navigation System Adhika Lie adhika@aem.umn.edu AEM 5333: Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles Feb 14, 2013 1 Navigation System Where am I? Position,
Tritech International Vehicle Sonar Developments
 Tritech International Vehicle Sonar Developments Mike Broadbent Business Development Manager Oceanology 2012 - UUVS Overview About Tritech Mechanical Scanning Sonar - Improving the performance High Speed
Tritech International Vehicle Sonar Developments Mike Broadbent Business Development Manager Oceanology 2012 - UUVS Overview About Tritech Mechanical Scanning Sonar - Improving the performance High Speed
Cooperative navigation: outline
 Positioning and Navigation in GPS-challenged Environments: Cooperative Navigation Concept Dorota A Grejner-Brzezinska, Charles K Toth, Jong-Ki Lee and Xiankun Wang Satellite Positioning and Inertial Navigation
Positioning and Navigation in GPS-challenged Environments: Cooperative Navigation Concept Dorota A Grejner-Brzezinska, Charles K Toth, Jong-Ki Lee and Xiankun Wang Satellite Positioning and Inertial Navigation
Combined USBL and Inertial Navigation
 SENSORS Combined USBL and Inertial Navigation Mikael Bliksted Larsen Sonardyne International October 13-14, 2009 Return to Session Directory Combined USBL and Inertial Navigation - an alternative and improved
SENSORS Combined USBL and Inertial Navigation Mikael Bliksted Larsen Sonardyne International October 13-14, 2009 Return to Session Directory Combined USBL and Inertial Navigation - an alternative and improved
Uncertainty-Based Localization Solution for Under-Ice Autonomous Underwater Vehicles
 Uncertainty-Based Localization Solution for Under-Ice Autonomous Underwater Vehicles Presenter: Baozhi Chen Baozhi Chen and Dario Pompili Cyber-Physical Systems Lab ECE Department, Rutgers University baozhi_chen@cac.rutgers.edu
Uncertainty-Based Localization Solution for Under-Ice Autonomous Underwater Vehicles Presenter: Baozhi Chen Baozhi Chen and Dario Pompili Cyber-Physical Systems Lab ECE Department, Rutgers University baozhi_chen@cac.rutgers.edu
Terrain Based Navigation using a Particle Filter for Long range glider missions. - Feasibility study and simulations -
 La Spezia, Italy April September 21 Master Thesis Report Terrain Based Navigation using a Particle Filter for Long range glider missions - Feasibility study and simulations - Julien Lagadec ENSIETA Ecole
La Spezia, Italy April September 21 Master Thesis Report Terrain Based Navigation using a Particle Filter for Long range glider missions - Feasibility study and simulations - Julien Lagadec ENSIETA Ecole
A Submersible Global Positioning System Receiving Antenna. John D. Moore Sound Ocean Systems, Inc.
 A Submersible Global Positioning System Receiving Antenna John D. Moore Sound Ocean Systems, Inc. jdmoore@soundocean.com Abstract Long endurance missions using Autonomous Underwater Vehicles (AUVs) to
A Submersible Global Positioning System Receiving Antenna John D. Moore Sound Ocean Systems, Inc. jdmoore@soundocean.com Abstract Long endurance missions using Autonomous Underwater Vehicles (AUVs) to
LOCALIZATION WITH GPS UNAVAILABLE
 LOCALIZATION WITH GPS UNAVAILABLE ARES SWIEE MEETING - ROME, SEPT. 26 2014 TOR VERGATA UNIVERSITY Summary Introduction Technology State of art Application Scenarios vs. Technology Advanced Research in
LOCALIZATION WITH GPS UNAVAILABLE ARES SWIEE MEETING - ROME, SEPT. 26 2014 TOR VERGATA UNIVERSITY Summary Introduction Technology State of art Application Scenarios vs. Technology Advanced Research in
Multiple Antenna Processing for WiMAX
 Multiple Antenna Processing for WiMAX Overview Wireless operators face a myriad of obstacles, but fundamental to the performance of any system are the propagation characteristics that restrict delivery
Multiple Antenna Processing for WiMAX Overview Wireless operators face a myriad of obstacles, but fundamental to the performance of any system are the propagation characteristics that restrict delivery
UHF Phased Array Ground Stations for Cubesat Applications
 UHF Phased Array Ground Stations for Cubesat Applications Colin Sheldon, Justin Bradfield, Erika Sanchez, Jeffrey Boye, David Copeland and Norman Adams 10 August 2016 Colin Sheldon, PhD 240-228-8519 Colin.Sheldon@jhuapl.edu
UHF Phased Array Ground Stations for Cubesat Applications Colin Sheldon, Justin Bradfield, Erika Sanchez, Jeffrey Boye, David Copeland and Norman Adams 10 August 2016 Colin Sheldon, PhD 240-228-8519 Colin.Sheldon@jhuapl.edu
Underwater Acoustic Communication and Modem-Based Navigation Aids
 Underwater Acoustic Communication and Modem-Based Navigation Aids Dale Green Teledyne Benthos 49 Edgerton Drive North Falmouth, MA 02556 USA Abstract. New forms of navigation aids for underwater vehicles
Underwater Acoustic Communication and Modem-Based Navigation Aids Dale Green Teledyne Benthos 49 Edgerton Drive North Falmouth, MA 02556 USA Abstract. New forms of navigation aids for underwater vehicles
Multi-Band Acoustic Modem for the Communications and Navigation Aid AUV
 Multi-Band Acoustic Modem for the Communications and Navigation Aid AUV Lee E. Freitag, Matthew Grund, Jim Partan, Keenan Ball, Sandipa Singh, Peter Koski Woods Hole Oceanographic Institution Woods Hole,
Multi-Band Acoustic Modem for the Communications and Navigation Aid AUV Lee E. Freitag, Matthew Grund, Jim Partan, Keenan Ball, Sandipa Singh, Peter Koski Woods Hole Oceanographic Institution Woods Hole,
Pedestrian Navigation System Using. Shoe-mounted INS. By Yan Li. A thesis submitted for the degree of Master of Engineering (Research)
") Pedestrian Navigation System Using Shoe-mounted INS By Yan Li A thesis submitted for the degree of Master of Engineering (Research) Faculty of Engineering and Information Technology University of Technology,
Pedestrian Navigation System Using Shoe-mounted INS By Yan Li A thesis submitted for the degree of Master of Engineering (Research) Faculty of Engineering and Information Technology University of Technology,
INTRODUCTION TO WIRELESS SENSOR NETWORKS. CHAPTER 8: LOCALIZATION TECHNIQUES Anna Förster
 INTRODUCTION TO WIRELESS SENSOR NETWORKS CHAPTER 8: LOCALIZATION TECHNIQUES Anna Förster OVERVIEW 1. Localization Challenges and Properties 1. Location Information 2. Precision and Accuracy 3. Localization
INTRODUCTION TO WIRELESS SENSOR NETWORKS CHAPTER 8: LOCALIZATION TECHNIQUES Anna Förster OVERVIEW 1. Localization Challenges and Properties 1. Location Information 2. Precision and Accuracy 3. Localization
Inertial Systems. Ekinox 2 Series TACTICAL GRADE MEMS. Motion Sensing & Navigation IMU AHRS MRU INS VG
 Ekinox 2 Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.02 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE EKINOX 2 SERIES R&D specialists usually compromise between
Ekinox 2 Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.02 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE EKINOX 2 SERIES R&D specialists usually compromise between
Satellite Navigation (and positioning)
") Satellite Navigation (and positioning) Picture: ESA AE4E08 Instructors: Sandra Verhagen, Hans van der Marel, Christian Tiberius Course 2010 2011, lecture 1 Today s topics Course organisation Course contents
Satellite Navigation (and positioning) Picture: ESA AE4E08 Instructors: Sandra Verhagen, Hans van der Marel, Christian Tiberius Course 2010 2011, lecture 1 Today s topics Course organisation Course contents
A CONCEPTUAL DESIGN OF SENSOR NETWORK TO DETECT THE POSITION OF UNDERWATER VEHICLES
 A CONCEPTUAL DESIGN OF SENSOR NETWORK TO DETECT THE POSITION OF UNDERWATER EHICLES Jagan M 1, Ananth R 2, Ramadass G A 3 and Sudarsan K 4 1 PG Scholar, Electronics and Communication Engineering, Agni College
A CONCEPTUAL DESIGN OF SENSOR NETWORK TO DETECT THE POSITION OF UNDERWATER EHICLES Jagan M 1, Ananth R 2, Ramadass G A 3 and Sudarsan K 4 1 PG Scholar, Electronics and Communication Engineering, Agni College
NPAL Acoustic Noise Field Coherence and Broadband Full Field Processing
 NPAL Acoustic Noise Field Coherence and Broadband Full Field Processing Arthur B. Baggeroer Massachusetts Institute of Technology Cambridge, MA 02139 Phone: 617 253 4336 Fax: 617 253 2350 Email: abb@boreas.mit.edu
NPAL Acoustic Noise Field Coherence and Broadband Full Field Processing Arthur B. Baggeroer Massachusetts Institute of Technology Cambridge, MA 02139 Phone: 617 253 4336 Fax: 617 253 2350 Email: abb@boreas.mit.edu
NovAtel s. Performance Analysis October Abstract. SPAN on OEM6. SPAN on OEM6. Enhancements
 NovAtel s SPAN on OEM6 Performance Analysis October 2012 Abstract SPAN, NovAtel s GNSS/INS solution, is now available on the OEM6 receiver platform. In addition to rapid GNSS signal reacquisition performance,
NovAtel s SPAN on OEM6 Performance Analysis October 2012 Abstract SPAN, NovAtel s GNSS/INS solution, is now available on the OEM6 receiver platform. In addition to rapid GNSS signal reacquisition performance,
Minnesat: GPS Attitude Determination Experiments Onboard a Nanosatellite
 SSC06-VII-7 : GPS Attitude Determination Experiments Onboard a Nanosatellite Vibhor L., Demoz Gebre-Egziabher, William L. Garrard, Jason J. Mintz, Jason V. Andersen, Ella S. Field, Vincent Jusuf, Abdul
SSC06-VII-7 : GPS Attitude Determination Experiments Onboard a Nanosatellite Vibhor L., Demoz Gebre-Egziabher, William L. Garrard, Jason J. Mintz, Jason V. Andersen, Ella S. Field, Vincent Jusuf, Abdul
One interesting embedded system
 One interesting embedded system Intel Vaunt small glass Key: AR over devices that look normal https://www.youtube.com/watch?v=bnfwclghef More details at: https://www.theverge.com/8//5/696653/intelvaunt-smart-glasses-announced-ar-video
One interesting embedded system Intel Vaunt small glass Key: AR over devices that look normal https://www.youtube.com/watch?v=bnfwclghef More details at: https://www.theverge.com/8//5/696653/intelvaunt-smart-glasses-announced-ar-video
Experimental Results in Synchronous-Clock One-Way-Travel-Time Acoustic Navigation for Autonomous Underwater Vehicles
 Experimental Results in Synchronous-Clock One-Way-Travel-Time Acoustic Navigation for Autonomous Underwater Vehicles Ryan M. Eustice, Louis L. Whitcomb, Hanumant Singh, and Matthew Grund Department of
Experimental Results in Synchronous-Clock One-Way-Travel-Time Acoustic Navigation for Autonomous Underwater Vehicles Ryan M. Eustice, Louis L. Whitcomb, Hanumant Singh, and Matthew Grund Department of
Towards large scale underwater communication networks miniature, low cost, low power acoustic transceiver design
 Towards large scale underwater communication networks miniature, low cost, low power acoustic transceiver design Jeff Neasham, Senior Lecturer, School of Electrical & Electronic Engineering Outline Background.
Towards large scale underwater communication networks miniature, low cost, low power acoustic transceiver design Jeff Neasham, Senior Lecturer, School of Electrical & Electronic Engineering Outline Background.