Cascaded Radar And Body&Chassis Automotive Applications. Dan Wang, System Manager, Radar & Analytics, EP
|
|
|
- Luke Ray
- 5 years ago
- Views:
Transcription


1 Cascaded Radar And Body&Chassis Automotive Applications Dan Wang, System Manager, Radar & Analytics, EP 1

2 Dan Wang System Manager, Radar & Analytics Career PhD, Electrical Engineering, University of Texas at Austin System Engineer, Perception Processing & Analytics Lab, Radar & Analytics, EP, 2012~2017 System manager, Radar & Analytics, EP, 2018 Expertise Radar signal processing algorithms System analysis/development Multi-core DSP programing/optimization 2
3 TI training summary Cascaded Radar and Body&Chassis Automotive Applications: This presentation will cover two topics. The first session describes how to cascade multiple TI single chip radars to a high performance radar sensor with enhanced angle and range detection performance. A cascade radar system proposal will be presented followed by some demonstrate results based on TI 4-chip cascade radar system. The second session introduces multiple body and chassis automotive applications based on TI single chip radar. For each application, the corresponding hardware EVM and basic signal processing chain will be introduced. What you ll learn: Why need cascade radar and how to cascade based on TI radar chip What the performance of cascade radar What are the automotive application for body & chassis Training level: Intermediate Course Details: Audience: All Specific TI Designs & Parts Discussed: AWR1243, AWR1443, AWR1642 3
4 Agenda Cascade Radar What/Why cascade radar How to cascade multiple radar chips What TI cascade radar can achieve Body&Chassis Automotive Applications Driver vital sign monitoring: hardware, signal processing chain Obstacle detection for door/chunk opening: hardware, signal processing chain Occupancy detection: hardware, signal processing chain 4

5 76 81 GHz mmwave Sensors (Sampling) 4RX 3TX AW R Calibration, Monitoring Engine Synth CSI2 SPI 4RX 3TX AW R Calibration, Monitoring Engine Synth R4F Radar Acc 576KB CAN SPI 4RX 2TX AW R Calibration, Monitoring Engine Synth R4F C674x 1.5MB CANFD CAN SPI Crypto HIL Radar Sensor Use Cases Imaging Radar Sensor 2x or 4x AWR12 (cascade) + External DSP MRR and LRR Radar Sensor + HW Accelerator Use Cases Entry-level Single-chip Radar Proximity warning Free space sensor in and around the vehicle Occupant detection, driver monitoring Radar Sensor + DSP Use Cases USRR Single Chip Radar 160 Degree, 40m SRR Single chip Radar 120m Cross traffic Alert 5
6 Cascaded Radar 6
7 What is Cascaded Radar? to Device 1 to Device 2 TX antennas RX antennas Device 1 Device 2 The two devices are synchronized and work as a single unit, coherently processing data from all the antennas 7
8 Why Cascading? Range resolution: Directly proportional to the bandwidth (B) spanned by the chirp. TI s AWRxxxx solution : chirp bandwidth of 4GHz=> 4cm range resolution Velocity resolution: Velocity resolution can be improved by increasing frame time (T f )=> No hardware cost. A T f of 5ms => v res of 1.5 kmph Angle resolution (improved by cascade): Improving angle resolution requires increasing the number of TX/RX antennas Cost & area constraints limits the number of TX/RX chains per chip A device with 2TX and 4 RX can achieve a theoretical angle resolution of only 15 o TX RX Maximum detection range (improved by cascade): Larger number of TX/RX antennas improves maximum detection range Detection range can be more than 300 meters with 4 chip cascade board Cascading of multiple radar chips (e.g. 2,4) provides a cost effective and scalable solution to address the differing angle resolution requirements of various applications 8



9 Enabling Level 2 and Beyond of Automated Driving CORNER/MRR High Performance LRR AWR1243 Processor AWR1243 AWR1243 AWR1243 AWR1243 AWR1243 TDA3x TDA2x 4x angular resolution Virtual array of 48 channels beam steering < 1 angular resolution > 300 meters range Virtual array of 192 channels Curbs/Overhanging objects Overhead bridges/tunnels Dense urban scenarios 9
10 Modes of operation of cascade radar: MIMO Multiple TX antennas transmit independently Multiplexing of the transmitters can be in frequency (FDM), time (TDM), code-space (BPM) or a combination of the above. A single snap-shot with independent transmissions from all TX s, can illuminate the entire scene. Suitable for applications which require a high angular resolution over a wide field of view. (such as in MRR/SRR/USRR Imaging radar) MIMO Operation In this example, an independent transmission from each of the two TX s (with all the RX s receiving), generates a virtual array of length 2x4=8 antennas. 10
11 Modes of operation of cascade radar: TX beamforming Multiple TX antennas transmit simultaneously & coherently to create a focused beam. Phase shifts across TX antennas can steer the beam in a desired direction Coherent gain across the N TX antennas improves SNR (20log 10 (N TX ) vs. 10log 10 (N TX ) in MIMO) Suitable for applications which require maximum range and high angular resolution over a narrow field of view (such as in LRR) TX beamforming operation φ φ φ φ φ φ φ φ φ φ φ φ TX1 TX2 TX3 TX1 TX2 TX3 TX1 TX2 TX3 TX1 TX2 TX3 Device 1 Device 2 Device 3 Device 4 A single snap-shot illuminates a narrow FOV. Multiple snap-shots (scanned sequentially) to cover a wider FOV 11

12 MIMO vs TX beamforming SNR _ N SNR N 12
13 Cascade challenges: shared LO Why shared LO? Local Oscillator (LO) The chirp generated by the LO, also has associated phase noise. Ensuring that transmit and receive signal originate from the same LO, results in phase noise cancellation => mitigates the adverse impact of phase noise in the IF signal IF frequency The bumper reflection/antenna coupling signal is typically the most dominant IF signal. A shared LO source reduces the associated phase noise by several 10 s of db (red- independent LO vs blue shared LO) 13
14 Cascade challenges: shared LO Device #1 (master) Device #1 Shared LO => LO routed from master to slave(s) LO Device #2 Note: LO is generated and routed at ~ 20GHz. Slave does a 4x to 77 GHz band. Routing at 20GHz (instead of 77GHz eases routing) Device #2 (slave) 14
 15")
15 Cascade challenges: shared LO Device #1 (master) LO Device #1 Device #2 Digital Synch Shared LO => LO routed from master to slave(s) Additionally ADC sampling and transmission time across devices needs to be synchronized => Digital synch signal from master routed to all slaves. Device #2 (slave) 15
16 Cascade challenges: LO length matching In the TX beam forming mode of operation, TX antennas across multiple devices are fired simultaneously to create a stronger and more focused beam. Device #1 (master) All TX s should transmit in phase => LO routing from master to all the slaves needs to be length matched. LO Device #1 Master has the capability to use LO signal routed from an external pin. This can be used to achieve inter-chip delay matching. LO Digital Synch Device #2 (slave) LO Device #2 16

17 4 Chip Cascading Scheme 17
18 Cascade Radar : TI offering AWR1243 features that enable cascading PINS 1 Ref clock synchronization 2 LO synchronization 3 Frame Synchronization Reference clock from master is shared with all the slaves. LO from master is shared with all the slaves. LO is output from the master through two different delay matched pins Start of frame synchronized between master and all slaves. OSC_CLKOUT, CLKP FMCW_ SYNCOUT, FMCW_CLKOUT, SYNC_IN, SYNC_OUT 4 TX Phase shifter Can be programmed in steps of 5.6 o 5 Collateral TI 4-chip EVM board Accompanying digital board which can stream ADC data via Ethernet to PC Sample Matlab Code for TX beamforming/mimo 18

19 Imaging Radar System Demonstrator 4-chip cascade prototype implemented on a multi-layer PCB with Rogers 3003 top layer RX 3-D antenna pattern supporting MIMO and TX beamforming Tested in anechoic chamber and in multiple indoor/outdoor environments Pedestrian detection at > 140m Car detection at > 270m Azimuth angular resolution 1.4 TX 19


20 Lab Test Two corner reflectors separated by 1.7 degrees Two separate peaks detected at 1.7 degree separation (in the angle-fft). Close to the expected angle resolution of 1.4 degree 20



21 Single Car with car door open 45 degrees with door open 45 degrees meters Door 21

22 Contour of Curb Trees Curb Pole Grass Curb Curb 22
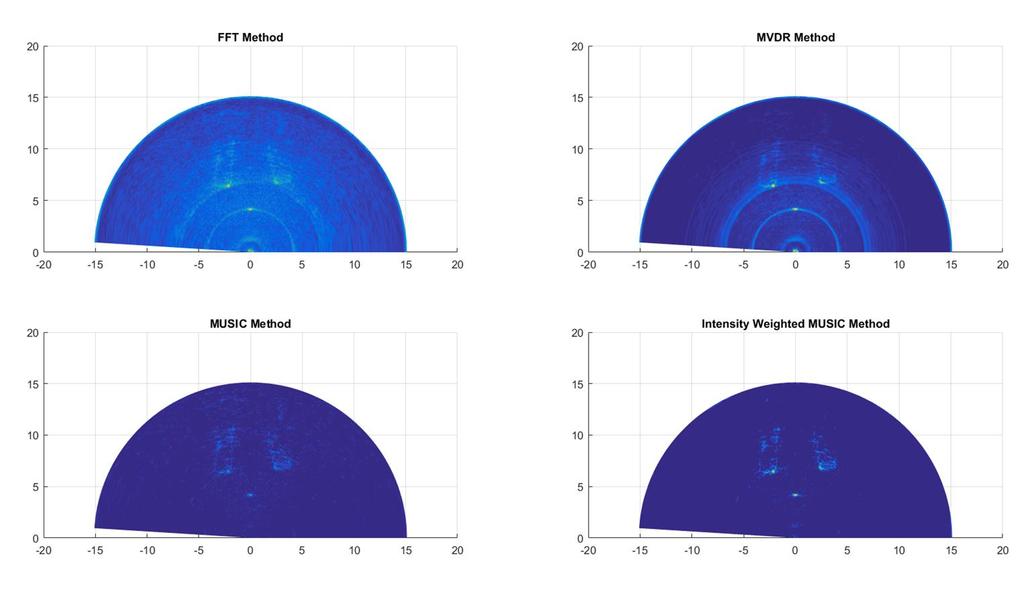

23 Comparison Angle estimation methods 23

24 Field Test 1 : MIMO Radar 24

25 Field Test 2 : TX beamforming (pedestrian) 25
")
26 Field Test 3 : TX beamforming (car) 26
27 To see the entire video covering all field tests : 27
28 Body&Chassis Automotive Applications 28


29 Adjacent Automotive Applications (1/2) Change the channel Infotainment control using gesture No child left behind Occupancy detection Avoid the garage door Obstacle detection during trunk opening kick to open Gesture based trunk opening Are you getting sleepy? Driver Vital Sign monitoring Cyclist avoidance - Obstacle detection during door opening
30 Agenda Adjacent automotive applications using radar Obstacle detection. Driver vital sign monitoring. Occupancy detection. Gesture recognition. 30

31 Adjacent Automotive Applications (2/2) Why Radar: Fine Range and velocity resolution Robust under weather Aesthetics: can be placed behind a façade Multi-use : E.g. parking sensor doubles as a kick-to-open sensor High Sensitivity to small movement. The AWR GHz integrated radar sensor is ideally suited for these applications: Chirp with 4GHz bandwidth 2 TX 4 RX C6748 ARM 1.5MB on-chip Application note 31
32 Obstacle Detection Sensor 32



33 Obstacle Detection Sensor (1/4) Applications Car Door Opening Detect obstacles around car door and lock movement to avoid damage Trunk Opening Detect obstacles around trunk to avoid damage while opening Parking assistance Detect objects like plastic, metal cones, curb, tree, mesh, other cars, motorcycle, pedestrian while parking a car Detect potholes/speed bumps For smoother driving by tuning the suspension based on the road ahead. 33


: Antenna layout Radiation Pattern")
34 Obstacle Detection Sensor (2/4) Hardware Platform - Newly designed antenna Wide field of view ±80, Elevation measurement. Detection range of 15m, - Otherwise similar to AWR1642BOOST EVM ODS EVM Board Non-uniform Receiver array NURA 3x4 (B): Antenna layout Radiation Pattern Using 2Tx and 4Rx a virtual array of 3 x 4 is generated 34


")
35 Obstacle Detection Sensor (3/4) - Processing Chain RF RF DC correction window DC correction window range FFT range FFT Doppler FFT Doppler FFT non-coherent integration Detection Classic FMCW radar processing Angle Estimation (azimuth and elevation) Object list with location and metrics Identified targets range FFT Doppler FFT data collected over one frame) 35
36 Obstacle Detection Sensor (4/4) Evaluation Car door detection in horizontal plane Car door detection in vertical plane Sensor 50cm from ground
37 Obstacle Detection Sensor (4/4) Evaluation Car door detection in horizontal plane Car door detection in vertical plane Sensor 50cm from ground Objects detected not as obstacles Pole detected as obstacle
 Evaluation Chirp")




38 Obstacle Detection Sensor (4/4) Evaluation Chirp configuration Car door detection in horizontal plane Car door detection in vertical plane Sensor 50cm from ground Objects detected not as obstacles Pole detected as obstacle Reference : Early evaluation code and EVM schematics available now at mysecuresw
39 Driver Vital Sign Monitoring 39
40 Driver Vital-Signs Monitoring (1/4) - Application Targeted application : Monitoring of heart and breathing rate of driver. Heart-rate variability, If driver is falling asleep, the heart/breathing rate would slowly decrease. How does Radar measure heart-rate? 77Ghz radar doesn t penetrate the skin. Radar can measure body surface movements due to breathing/heartrate. Uses the sensitivity of 77Ghz radar to small movements (1mm => 180 degrees phase shift). Typical vital sign parameters From Front From Back Vital Signs Frequency Amplitude Amplitude Breathing Rate (Adults) Hz ~ 1-12 mm ~ mm Heart Rate (Adults) Hz ~ mm ~ mm 40
 Vital signs waveform is sampled")
41 Driver Vital-Signs Monitoring (2/4) 100 ADC Samples per chirp. Chirp duration is 50 ms based on the IF sampling rate of 2 MHz Each frame is configured to have 2 chirps. However only the 1st Chirp in the frame is used for processing A single TX-RX antenna pair is currently used for processing (Although all the RX antennas are enabled) Vital signs waveform is sampled along the slow time axis hence the vital signs sampling rate is equal to the Frame-rate of system Frame 1 Frame 2 Frame 3 Frame N Duty Cycle < 1 % Frame Periodicity = 50 ms Range- FFT Range- FFT Range- FFT Range- FFT Range-Bins Object Range Bin Extract Phase and unwrap for the object range bin Further Processing for Vital Signs Estimation Slow Time Axis Slow Time Axis 41
42 Driver Vital-Signs Monitoring (2/4) Processing Range Profile 42
43 Driver Vital-Signs Monitoring (2/4) Processing Range Profile Range of interest. 43

44 Driver Vital-Signs Monitoring (2/4) Processing Range Profile Extracted phase information 44

45 Driver Vital-Signs Monitoring (2/4) Processing Range Profile Extracted phase information (Bandpass-filtered Hz) Filtered for breathing 45
 Filtered for breathing (Bandpass-filtered 0.8 2.")
46 Driver Vital-Signs Monitoring (2/4) Processing Range Profile Extracted phase information (Bandpass-filtered Hz) Filtered for breathing (Bandpass-filtered Hz) Filtered for heart beat 46
47 Driver Vital-Signs Monitoring (3/4) Processing Real-time implementation (20 fps) on the C674x DSP Processing Core Processing done over a running window of T ~ 16 seconds. New estimates are updated every 1 second Memory Requirements ~ 16 kb, CPU Processing time for a single estimate ~ 4 ms Range-bin tracking Range FFT Selected Target Range-Bin (updated every few secs) Parameters Bandwidth Fc (Starting Frequency) Extract Phase from selected range bin Fs (Slow Time Axis sampling) Fs_ADC (ADC sampling rate) N (Samples per Chirp) T c (Chirp Duration) Chirp Parameters Typical Values 3.6 GHz 77 GHz 20 Hz 2 MHz 100 samples 50 us Phase unwrapping Phase Differences Breathing Heart Beat Bandpass Filter Hz Bandpass Filter Hz Motion Corrupted segment Yes Discard the segment Spectral Estimation - FFT - Auto-Correlation - Peak interval Place segment in Buffer of valid values No Decision Spectral Estimation - FFT - Auto-Correlation - Peak interval Issues. Continuous driver movement can make measurement difficult. Breathing Rate Decision Heart Rate 47


48 Driver Vital-Signs Monitoring (4/4) Evaluation AWR1642 BOOST sensor is used for testing The sensor is embedded into the seat, behind the driver.
49 Driver Vital-Signs Monitoring (4/4) Evaluation GUI showing heart rate and breathing rate

50 Driver Vital-Signs Monitoring (4/4) Evaluation GUI showing heart rate and breathing rate Reference Code: Link Video 50
51 Vehicle Occupant Detection 51
52 Vehicle Occupant Detection (1/3) - Applications. Child left behind in car detection - Detect the presence of a child in car when a caregiver locks the car door forgetting to take the child outside Occupancy detection - Detection of a lifeform in any seat to determine the force of airbag deployment in case of crashes Intruder detection Detection of a intruder breaking into a car
53 Vehicle Occupant Detection (2/3) - Processing chain. RF DC correction window range FFT Clutter removal Angle spectrum estimation Spatial heat map Post Processing Occupancy decision RF DC correction window range FFT Clutter removal 53 53

54 Vehicle Occupant Detection (2/3) - Processing chain. RF DC correction window range FFT Clutter removal Angle spectrum estimation Spatial heat map Post Processing Occupancy decision RF DC correction window range FFT Clutter removal Main difference with OOB is that No doppler processing is performed. Angle estimation is performed using MVDR. Provides better angular resolution assuming targets are slowly moving.

55 Vehicle Occupant Detection (2/3) - Processing chain. RF DC correction window range FFT Clutter removal Angle spectrum estimation Spatial heat map Post Processing Occupancy decision RF DC correction window range FFT Clutter removal Chirp configuration Main difference with OOB is that No doppler processing is performed. Angle estimation is performed using MVDR. Provides better angular resolution assuming targets are slowly moving.

56 Vehicle Occupant Detection (3/3) - Evaluation. Demo can perform zone-based detection. Is a seat occupied? User defined zone. 56
57 Vehicle Occupant Detection (3/3) - Evaluation. In-car test, demonstrating the detection of pets. Pets have very small RCS 57
58 Vehicle Occupant Detection (3/3) - Evaluation. Dog In-car test, demonstrating the detection of pets. Pets have very small RCS 58

59 Vehicle Occupant Detection (3/3) - Evaluation. Dog In-car test, demonstrating the detection of pets. Pets have very small RCS Collateral : Source code : link white paper : link Evaluation module : AWR1642BOOST 59
60 Gesture Inference 60



61 Gesture Inference (1/4) Applications Kick to open - Detect the kick gesture to open the trunk of a car hands-free. In-cabin gestures - Swipe up and down to open and close the sun roof. - Swipe left and right to change radio channels. - Rotate finger to control radio volume. AWR1642 HWA 61
62 Gesture Inference (2/4) Processing 2D FFT Feature Extraction Feature Classification Post Processing Input: ADC samples Intermediate O/P: Range Doppler Image (RDI) Intermediate O/P: Per frame Feature Vector Intermediate O/P: Classified Gesture Output: Filtered Gesture
 Intermediate O/P:")

63 Gesture Inference (2/4) Processing 2D FFT Feature Extraction Feature Classification Post Processing Input: ADC samples Intermediate O/P: Range Doppler Image (RDI) Intermediate O/P: Per frame Feature Vector Intermediate O/P: Classified Gesture Output: Filtered Gesture Radar advantages over camera Fine velocity estimation. Enables detection of fine motion Unaffected by light..
64 Gesture Inference (2/4) Processing 2D FFT Feature Extraction Gesture Classification Post Processing Input: ADC samples Specifications Chirp Parameters Gesture Recognition Max. Range (m) 3.35 m (ROI limited to 80 cm) Range Resolution (m) 0.05 m Absolute Velocity (m/s) 2.5 m/s Velocity Resolution (m/s) m/s Range Dimension 64 Doppler Dimension 256 Frames/sec 19.6 Output: Filtered Gesture
65 Gesture Inference (3/4) Signatures Weighted Doppler Instantaneous Energy Weighted Range Azimuth Angle Elevation Angle Azimuth-Doppler Correlation 1. Right2Left Swipe
66 Gesture Inference (3/4) Signatures Weighted Doppler Instantaneous Energy Weighted Range Azimuth Angle Elevation Angle Azimuth-Doppler Correlation 1. Right2Left Swipe 2. Left2Right Swipe


67 Gesture Inference (3/4) Signatures Weighted Doppler Instantaneous Energy Weighted Range Azimuth Angle Elevation Angle Azimuth-Doppler Correlation 1. Right2Left Swipe 2. Left2Right Swipe
68 Gesture Inference (4/4) Evaluation AWR1642 ODS sensor is used for testing. Neural network runs on the chip. Current Status Upto 6 gestures can be detected. Reference processing chain and training feature set Available in May
69 Summary Cascade Radar Why cascade? Higher angle resolution and longer distance Multimode cascade radar: MIMO and TX beamforming Master/slave share LO for frequency/phase synchronization TI 4-chip cascade demonstration( Body&Chassis Automotive Applications Obstacle detection for door opening Driver vital sign monitoring Occupancy detection Gesture recognition 69
70 Reference Automotive body and chassis applications, AWR1243 Cascade, MIMO Radar, Cascade Video, Obstacle Detection, Vital Sign Monitoring, 70
71 Thank you 71
77GHz single chip radar sensor enables automotive body and chassis applications
 77GHz single chip radar sensor enables automotive body and chassis applications Sandeep Rao Radar Systems Architect Adeel Ahmad Systems Engineer Dr. June Chul Roh Senior Systems Architect Sachin Bharadwaj
77GHz single chip radar sensor enables automotive body and chassis applications Sandeep Rao Radar Systems Architect Adeel Ahmad Systems Engineer Dr. June Chul Roh Senior Systems Architect Sachin Bharadwaj
The First CMOS SoC of 77GHz mmwave Sensor Used in Automotive and Industrial. 2017/11/15-16 TI Jesse Wang
 The First CMOS SoC of 77GHz mmwave Sensor Used in Automotive and Industrial 2017/11/15-16 TI Jesse Wang 1 Agenda Technology Overview TI 77GHz mmwave introduction Core Applications Automotive Industrial
The First CMOS SoC of 77GHz mmwave Sensor Used in Automotive and Industrial 2017/11/15-16 TI Jesse Wang 1 Agenda Technology Overview TI 77GHz mmwave introduction Core Applications Automotive Industrial
Radarbook Graphical User Interface (RBK-GUI User Manual)
") Radarbook Graphical User Interface (RBK-GUI User Manual) Inras GmbH Altenbergerstraße 69 4040 Linz, Austria Email: office@inras.at Phone: +43 732 2468 6384 Linz, July 2015 Contents 1 Document Version 2
Radarbook Graphical User Interface (RBK-GUI User Manual) Inras GmbH Altenbergerstraße 69 4040 Linz, Austria Email: office@inras.at Phone: +43 732 2468 6384 Linz, July 2015 Contents 1 Document Version 2
Increasing Automotive Safety with 77/79 GHz Radar Solutions for ADAS Applications
 Increasing Automotive Safety with 77/79 GHz Radar Solutions for ADAS Applications FTF-AUT-F0086 Patrick Morgan Director, Safety Systems Business Unit Ralf Reuter Manager, Radar Applications and Systems
Increasing Automotive Safety with 77/79 GHz Radar Solutions for ADAS Applications FTF-AUT-F0086 Patrick Morgan Director, Safety Systems Business Unit Ralf Reuter Manager, Radar Applications and Systems
TI mmwave Labs. Vital Signs Measurement (version 1.2)
") TI mmwave Labs Vital Signs Measurement (version 1.2) Contents Overview Requirements Software setup Pre-requisites Downloading the Lab Project Building the project Hardware setup Preparing the EVM Connecting
TI mmwave Labs Vital Signs Measurement (version 1.2) Contents Overview Requirements Software setup Pre-requisites Downloading the Lab Project Building the project Hardware setup Preparing the EVM Connecting
MR24-01 FMCW Radar for the Detection of Moving Targets (Persons)
") MR24-01 FMCW Radar for the Detection of Moving Targets (Persons) Inras GmbH Altenbergerstraße 69 4040 Linz, Austria Email: office@inras.at Phone: +43 732 2468 6384 Linz, September 2015 1 Measurement Setup
MR24-01 FMCW Radar for the Detection of Moving Targets (Persons) Inras GmbH Altenbergerstraße 69 4040 Linz, Austria Email: office@inras.at Phone: +43 732 2468 6384 Linz, September 2015 1 Measurement Setup
Ultra-small, economical and cheap radar made possible thanks to chip technology
 Edition March 2018 Radar technology, Smart Mobility Ultra-small, economical and cheap radar made possible thanks to chip technology By building radars into a car or something else, you are able to detect
Edition March 2018 Radar technology, Smart Mobility Ultra-small, economical and cheap radar made possible thanks to chip technology By building radars into a car or something else, you are able to detect
Simulating and Testing of Signal Processing Methods for Frequency Stepped Chirp Radar
 Test & Measurement Simulating and Testing of Signal Processing Methods for Frequency Stepped Chirp Radar Modern radar systems serve a broad range of commercial, civil, scientific and military applications.
Test & Measurement Simulating and Testing of Signal Processing Methods for Frequency Stepped Chirp Radar Modern radar systems serve a broad range of commercial, civil, scientific and military applications.
AN77-07 Digital Beamforming with Multiple Transmit Antennas
 AN77-07 Digital Beamforming with Multiple Transmit Antennas Inras GmbH Altenbergerstraße 69 4040 Linz, Austria Email: office@inras.at Phone: +43 732 2468 6384 Linz, July 2015 1 Digital Beamforming with
AN77-07 Digital Beamforming with Multiple Transmit Antennas Inras GmbH Altenbergerstraße 69 4040 Linz, Austria Email: office@inras.at Phone: +43 732 2468 6384 Linz, July 2015 1 Digital Beamforming with
Enabling autonomous driving
 Automotive fuyu liu / Shutterstock.com Enabling autonomous driving Autonomous vehicles see the world through sensors. The entire concept rests on their reliability. But the ability of a radar sensor to
Automotive fuyu liu / Shutterstock.com Enabling autonomous driving Autonomous vehicles see the world through sensors. The entire concept rests on their reliability. But the ability of a radar sensor to
Scalable Front-End Digital Signal Processing for a Phased Array Radar Demonstrator. International Radar Symposium 2012 Warsaw, 24 May 2012
 Scalable Front-End Digital Signal Processing for a Phased Array Radar Demonstrator F. Winterstein, G. Sessler, M. Montagna, M. Mendijur, G. Dauron, PM. Besso International Radar Symposium 2012 Warsaw,
Scalable Front-End Digital Signal Processing for a Phased Array Radar Demonstrator F. Winterstein, G. Sessler, M. Montagna, M. Mendijur, G. Dauron, PM. Besso International Radar Symposium 2012 Warsaw,
Tracking of Moving Targets with MIMO Radar
 Tracking of Moving Targets with MIMO Radar Peter W. Moo, Zhen Ding Radar Sensing & Exploitation Section DRDC Ottawa Research Centre Presentation to 2017 NATO Military Sensing Symposium 31 May 2017 waveform
Tracking of Moving Targets with MIMO Radar Peter W. Moo, Zhen Ding Radar Sensing & Exploitation Section DRDC Ottawa Research Centre Presentation to 2017 NATO Military Sensing Symposium 31 May 2017 waveform
EG 1 Millimeter-wave & Integrated Antennas
 EuCAP 2010 ARTIC Workshop 5-12 July, San Diego, California EG 1 Millimeter-wave & Integrated Antennas Ronan SAULEAU Ronan.Sauleau@univ-rennes1.fr IETR (Institute of Electronics and Telecommunications,
EuCAP 2010 ARTIC Workshop 5-12 July, San Diego, California EG 1 Millimeter-wave & Integrated Antennas Ronan SAULEAU Ronan.Sauleau@univ-rennes1.fr IETR (Institute of Electronics and Telecommunications,
Moving from legacy 24 GHz to state-of-the-art 77 GHz radar
 Moving from legacy 24 GHz to state-of-the-art 77 GHz radar Karthik Ramasubramanian, Radar Systems Manager Texas Instruments Kishore Ramaiah, Product Manager, Automotive Radar Texas Instruments Artem Aginskiy,
Moving from legacy 24 GHz to state-of-the-art 77 GHz radar Karthik Ramasubramanian, Radar Systems Manager Texas Instruments Kishore Ramaiah, Product Manager, Automotive Radar Texas Instruments Artem Aginskiy,
Multi-Doppler Resolution Automotive Radar
 217 2th European Signal Processing Conference (EUSIPCO) Multi-Doppler Resolution Automotive Radar Oded Bialer and Sammy Kolpinizki General Motors - Advanced Technical Center Israel Abstract Automotive
217 2th European Signal Processing Conference (EUSIPCO) Multi-Doppler Resolution Automotive Radar Oded Bialer and Sammy Kolpinizki General Motors - Advanced Technical Center Israel Abstract Automotive
Evaluation of Millimeter wave Radar using Stepped Multiple Frequency Complementary Phase Code modulation
 Evaluation of Millimeter wave Radar using Stepped Multiple Frequency Complementary Phase Code modulation Masato WATANABE and Takayuki INABA Graduate School of Electro-Communications, The University of
Evaluation of Millimeter wave Radar using Stepped Multiple Frequency Complementary Phase Code modulation Masato WATANABE and Takayuki INABA Graduate School of Electro-Communications, The University of
ELEC RADAR FRONT-END SUMMARY
 ELEC Radar Front-End is designed for FMCW (including CW) radar application. The output frequency of each RX provides range, speed, and amplitude information to DSP. It will detect target azimuth angle
ELEC Radar Front-End is designed for FMCW (including CW) radar application. The output frequency of each RX provides range, speed, and amplitude information to DSP. It will detect target azimuth angle
HiFi Radar Target. Kristian Karlsson (RISE)
") HiFi Radar Target Kristian Karlsson (RISE) Outline HiFi Radar Target: Overview Background & goals Radar introduction RCS measurements: Setups Uncertainty contributions (ground reflection) Back scattering
HiFi Radar Target Kristian Karlsson (RISE) Outline HiFi Radar Target: Overview Background & goals Radar introduction RCS measurements: Setups Uncertainty contributions (ground reflection) Back scattering
Automotive Radar Sensors and Congested Radio Spectrum: An Urban Electronic Battlefield?
 Automotive Radar Sensors and Congested Radio Spectrum: An Urban Electronic Battlefield? By Sefa Tanis Share on As automotive radars become more widespread, the heavily occupied RF spectrum will resemble
Automotive Radar Sensors and Congested Radio Spectrum: An Urban Electronic Battlefield? By Sefa Tanis Share on As automotive radars become more widespread, the heavily occupied RF spectrum will resemble
What is New in Wireless System Design
 What is New in Wireless System Design Houman Zarrinkoub, PhD. houmanz@mathworks.com 2015 The MathWorks, Inc. 1 Agenda Landscape of Wireless Design Our Wireless Initiatives Antenna-to-Bit simulation Smart
What is New in Wireless System Design Houman Zarrinkoub, PhD. houmanz@mathworks.com 2015 The MathWorks, Inc. 1 Agenda Landscape of Wireless Design Our Wireless Initiatives Antenna-to-Bit simulation Smart
New Automotive Applications for Smart Radar Systems
 New Automotive Applications for Smart Radar Systems Ralph Mende*, Hermann Rohling** *s.m.s smart microwave sensors GmbH Phone: +49 (531) 39023 0 / Fax: +49 (531) 39023 58 / ralph.mende@smartmicro.de Mittelweg
New Automotive Applications for Smart Radar Systems Ralph Mende*, Hermann Rohling** *s.m.s smart microwave sensors GmbH Phone: +49 (531) 39023 0 / Fax: +49 (531) 39023 58 / ralph.mende@smartmicro.de Mittelweg
Merging Propagation Physics, Theory and Hardware in Wireless. Ada Poon
 HKUST January 3, 2007 Merging Propagation Physics, Theory and Hardware in Wireless Ada Poon University of Illinois at Urbana-Champaign Outline Multiple-antenna (MIMO) channels Human body wireless channels
HKUST January 3, 2007 Merging Propagation Physics, Theory and Hardware in Wireless Ada Poon University of Illinois at Urbana-Champaign Outline Multiple-antenna (MIMO) channels Human body wireless channels
An Accurate phase calibration Technique for digital beamforming in the multi-transceiver TIGER-3 HF radar system
 An Accurate phase calibration Technique for digital beamforming in the multi-transceiver TIGER-3 HF radar system H. Nguyen, J. Whittington, J. C Devlin, V. Vu and, E. Custovic. Department of Electronic
An Accurate phase calibration Technique for digital beamforming in the multi-transceiver TIGER-3 HF radar system H. Nguyen, J. Whittington, J. C Devlin, V. Vu and, E. Custovic. Department of Electronic
Frequently asked questions for 24 GHz industrial radar
 Frequently asked questions for 24 GHz industrial radar What is radar? Radar is an object-detection system that uses radio waves to determine the range, angle, or velocity of objects. A radar system consists
Frequently asked questions for 24 GHz industrial radar What is radar? Radar is an object-detection system that uses radio waves to determine the range, angle, or velocity of objects. A radar system consists
Chapter 4 DOA Estimation Using Adaptive Array Antenna in the 2-GHz Band
 Chapter 4 DOA Estimation Using Adaptive Array Antenna in the 2-GHz Band 4.1. Introduction The demands for wireless mobile communication are increasing rapidly, and they have become an indispensable part
Chapter 4 DOA Estimation Using Adaptive Array Antenna in the 2-GHz Band 4.1. Introduction The demands for wireless mobile communication are increasing rapidly, and they have become an indispensable part
Waveform Multiplexing using Chirp Rate Diversity for Chirp-Sequence based MIMO Radar Systems
 Waveform Multiplexing using Chirp Rate Diversity for Chirp-Sequence based MIMO Radar Systems Fabian Roos, Nils Appenrodt, Jürgen Dickmann, and Christian Waldschmidt c 218 IEEE. Personal use of this material
Waveform Multiplexing using Chirp Rate Diversity for Chirp-Sequence based MIMO Radar Systems Fabian Roos, Nils Appenrodt, Jürgen Dickmann, and Christian Waldschmidt c 218 IEEE. Personal use of this material
BYU SAR: A LOW COST COMPACT SYNTHETIC APERTURE RADAR
 BYU SAR: A LOW COST COMPACT SYNTHETIC APERTURE RADAR David G. Long, Bryan Jarrett, David V. Arnold, Jorge Cano ABSTRACT Synthetic Aperture Radar (SAR) systems are typically very complex and expensive.
BYU SAR: A LOW COST COMPACT SYNTHETIC APERTURE RADAR David G. Long, Bryan Jarrett, David V. Arnold, Jorge Cano ABSTRACT Synthetic Aperture Radar (SAR) systems are typically very complex and expensive.
MAKING TRANSIENT ANTENNA MEASUREMENTS
 MAKING TRANSIENT ANTENNA MEASUREMENTS Roger Dygert, Steven R. Nichols MI Technologies, 1125 Satellite Boulevard, Suite 100 Suwanee, GA 30024-4629 ABSTRACT In addition to steady state performance, antennas
MAKING TRANSIENT ANTENNA MEASUREMENTS Roger Dygert, Steven R. Nichols MI Technologies, 1125 Satellite Boulevard, Suite 100 Suwanee, GA 30024-4629 ABSTRACT In addition to steady state performance, antennas
24GHz Modules Industrial Radar Solution
 24GHz Modules Industrial Radar Solution A joint offering of InnoSenT, EBV Elektronik and Infineon February 2017 Agenda 1 Radar solutions: our joint offering 2 Radar key applications and technology overview
24GHz Modules Industrial Radar Solution A joint offering of InnoSenT, EBV Elektronik and Infineon February 2017 Agenda 1 Radar solutions: our joint offering 2 Radar key applications and technology overview
Lateral Position Dependence of MIMO Capacity in a Hallway at 2.4 GHz
 Lateral Position Dependence of in a Hallway at 2.4 GHz Steve Ellingson & Mahmud Harun January 5, 2008 Bradley Dept. of Electrical and Computer Engineering Virginia Polytechnic Institute & State University
Lateral Position Dependence of in a Hallway at 2.4 GHz Steve Ellingson & Mahmud Harun January 5, 2008 Bradley Dept. of Electrical and Computer Engineering Virginia Polytechnic Institute & State University
Fundamental Concepts of Radar
 Fundamental Concepts of Radar Dr Clive Alabaster & Dr Evan Hughes White Horse Radar Limited Contents Basic concepts of radar Detection Performance Target parameters measurable by a radar Primary/secondary
Fundamental Concepts of Radar Dr Clive Alabaster & Dr Evan Hughes White Horse Radar Limited Contents Basic concepts of radar Detection Performance Target parameters measurable by a radar Primary/secondary
RSE02401/00 24 GHz Radar Sensor
 General description The RSE02401/00 is a fully integrated K-band FMCW radar sensor. It utilizes packaged low-cost components, enabling low unit prices and high volumes, using SMT assembly technology, with
General description The RSE02401/00 is a fully integrated K-band FMCW radar sensor. It utilizes packaged low-cost components, enabling low unit prices and high volumes, using SMT assembly technology, with
Design and Implementation of an Integrated Radar and Communication System for Smart Vehicle
 Design and Implementation of an Integrated Radar and Communication System for Smart Vehicle D. Mondal, R. Bera, M. Mitra Abstract This paper addresses the development efforts towards realization of Smart
Design and Implementation of an Integrated Radar and Communication System for Smart Vehicle D. Mondal, R. Bera, M. Mitra Abstract This paper addresses the development efforts towards realization of Smart
The Future Autonomous Driving Techniques and Test Challenges. Sr. Project Manager / Keysight Technologies
 The Future Autonomous Driving Techniques and Test Challenges Sr. Project Manager / Keysight Technologies Brian Su 2018.06.11 Taipei 2 3 Autonomous Driving & e-mobility Data Source: WHO, US EPA 4 Traffic
The Future Autonomous Driving Techniques and Test Challenges Sr. Project Manager / Keysight Technologies Brian Su 2018.06.11 Taipei 2 3 Autonomous Driving & e-mobility Data Source: WHO, US EPA 4 Traffic
5G Multi-Band Vector Transceiver
 SOLUTION BRIEF Streamlining high-volume test of 5G NR base stations 5G Multi-Band Vector Transceiver Compact, scalable solution accelerates deployment of 5G equipment 5G New Radio (NR) network equipment
SOLUTION BRIEF Streamlining high-volume test of 5G NR base stations 5G Multi-Band Vector Transceiver Compact, scalable solution accelerates deployment of 5G equipment 5G New Radio (NR) network equipment
Challenges of 5G mmwave RF Module. Ren-Jr Chen M300/ICL/ITRI 2018/06/20
 Challenges of 5G mmwave RF Module Ren-Jr Chen rjchen@itri.org.tw M300/ICL/ITRI 2018/06/20 Agenda 5G Vision and Scenarios mmwave RF module considerations mmwave RF module solution for OAI Conclusion 2 5G
Challenges of 5G mmwave RF Module Ren-Jr Chen rjchen@itri.org.tw M300/ICL/ITRI 2018/06/20 Agenda 5G Vision and Scenarios mmwave RF module considerations mmwave RF module solution for OAI Conclusion 2 5G
The Challenge: Increasing Accuracy and Decreasing Cost
 Solving Mobile Radar Measurement Challenges By Dingqing Lu, Keysight Technologies, Inc. Modern radar systems are exceptionally complex, encompassing intricate constructions with advanced technology from
Solving Mobile Radar Measurement Challenges By Dingqing Lu, Keysight Technologies, Inc. Modern radar systems are exceptionally complex, encompassing intricate constructions with advanced technology from
HR001118S0020 Millimeter-Wave Digital Arrays (MIDAS) Frequently Asked Questions (FAQ) February 12, 2018
 Frequently Asked Questions (FAQ) February 12, 2018") HR001118S0020 Millimeter-Wave Digital Arrays (MIDAS) Frequently Asked Questions (FAQ) February 12, 2018 Q1: Will there be multiple awards? A1: Yes, multiple awards are expected (page 4 of BAA). Q2: Will
HR001118S0020 Millimeter-Wave Digital Arrays (MIDAS) Frequently Asked Questions (FAQ) February 12, 2018 Q1: Will there be multiple awards? A1: Yes, multiple awards are expected (page 4 of BAA). Q2: Will
What s Behind 5G Wireless Communications?
 What s Behind 5G Wireless Communications? Marc Barberis 2015 The MathWorks, Inc. 1 Agenda 5G goals and requirements Modeling and simulating key 5G technologies Release 15: Enhanced Mobile Broadband IoT
What s Behind 5G Wireless Communications? Marc Barberis 2015 The MathWorks, Inc. 1 Agenda 5G goals and requirements Modeling and simulating key 5G technologies Release 15: Enhanced Mobile Broadband IoT
NANOSCALE IMPULSE RADAR
 NANOSCALE IMPULSE RADAR NVA6X00 Impulse Radar Transceiver and Development Kit 2012.4.20 laon@laonuri.com 1 NVA6000 The Novelda NVA6000 is a single-die CMOS chip that delivers high performance, low power,
NANOSCALE IMPULSE RADAR NVA6X00 Impulse Radar Transceiver and Development Kit 2012.4.20 laon@laonuri.com 1 NVA6000 The Novelda NVA6000 is a single-die CMOS chip that delivers high performance, low power,
A Hybrid Indoor Tracking System for First Responders
 A Hybrid Indoor Tracking System for First Responders Precision Indoor Personnel Location and Tracking for Emergency Responders Technology Workshop August 4, 2009 Marc Harlacher Director, Location Solutions
A Hybrid Indoor Tracking System for First Responders Precision Indoor Personnel Location and Tracking for Emergency Responders Technology Workshop August 4, 2009 Marc Harlacher Director, Location Solutions
Vehicle-to-X communication using millimeter waves
 Infrastructure Person Vehicle 5G Slides Robert W. Heath Jr. (2016) Vehicle-to-X communication using millimeter waves Professor Robert W. Heath Jr., PhD, PE mmwave Wireless Networking and Communications
Infrastructure Person Vehicle 5G Slides Robert W. Heath Jr. (2016) Vehicle-to-X communication using millimeter waves Professor Robert W. Heath Jr., PhD, PE mmwave Wireless Networking and Communications
Industrial radar sensing. April 2018
 Industrial radar sensing April 2018 The world is getting smarter An ever increasing number of sensors assist, enable and keep us safe everyday Radar is a smart sensor, with advanced sensing capabilities
Industrial radar sensing April 2018 The world is getting smarter An ever increasing number of sensors assist, enable and keep us safe everyday Radar is a smart sensor, with advanced sensing capabilities
UHF Phased Array Ground Stations for Cubesat Applications
 UHF Phased Array Ground Stations for Cubesat Applications Colin Sheldon, Justin Bradfield, Erika Sanchez, Jeffrey Boye, David Copeland and Norman Adams 10 August 2016 Colin Sheldon, PhD 240-228-8519 Colin.Sheldon@jhuapl.edu
UHF Phased Array Ground Stations for Cubesat Applications Colin Sheldon, Justin Bradfield, Erika Sanchez, Jeffrey Boye, David Copeland and Norman Adams 10 August 2016 Colin Sheldon, PhD 240-228-8519 Colin.Sheldon@jhuapl.edu
2015 The MathWorks, Inc. 1
 2015 The MathWorks, Inc. 1 What s Behind 5G Wireless Communications? 서기환과장 2015 The MathWorks, Inc. 2 Agenda 5G goals and requirements Modeling and simulating key 5G technologies Release 15: Enhanced Mobile
2015 The MathWorks, Inc. 1 What s Behind 5G Wireless Communications? 서기환과장 2015 The MathWorks, Inc. 2 Agenda 5G goals and requirements Modeling and simulating key 5G technologies Release 15: Enhanced Mobile
FLY EYE RADAR MINE DETECTION GROUND PENETRATING RADAR ON TETHERED DRONE PASSIVE RADAR FOR SMALL UAS PASSIVE SMALL PROJECTILE TRACKING RADAR
 PASSIVE RADAR FOR SMALL UAS PLANAR MONOLITHICS INDUSTRIES, INC. East Coast: 7311F GROVE ROAD, FREDERICK, MD 21704 USA PHONE: 301-662-5019 FAX: 301-662-2029 West Coast: 4921 ROBERT J. MATHEWS PARKWAY, SUITE
PASSIVE RADAR FOR SMALL UAS PLANAR MONOLITHICS INDUSTRIES, INC. East Coast: 7311F GROVE ROAD, FREDERICK, MD 21704 USA PHONE: 301-662-5019 FAX: 301-662-2029 West Coast: 4921 ROBERT J. MATHEWS PARKWAY, SUITE
Spread Spectrum-Digital Beam Forming Radar with Single RF Channel for Automotive Application
 Spread Spectrum-Digital Beam Forming Radar with Single RF Channel for Automotive Application Soumyasree Bera, Samarendra Nath Sur Department of Electronics and Communication Engineering, Sikkim Manipal
Spread Spectrum-Digital Beam Forming Radar with Single RF Channel for Automotive Application Soumyasree Bera, Samarendra Nath Sur Department of Electronics and Communication Engineering, Sikkim Manipal
Applications of Millimeter-Wave Sensors in ITS
 Applications of Millimeter-Wave Sensors in ITS by Shigeaki Nishikawa* and Hiroshi Endo* There is considerable public and private support for intelligent transport systems ABSTRACT (ITS), which promise
Applications of Millimeter-Wave Sensors in ITS by Shigeaki Nishikawa* and Hiroshi Endo* There is considerable public and private support for intelligent transport systems ABSTRACT (ITS), which promise
Electronics Design Laboratory Lecture #10. ECEN 2270 Electronics Design Laboratory
 Electronics Design Laboratory Lecture #10 Electronics Design Laboratory 1 Lessons from Experiment 4 Code debugging: use print statements and serial monitor window Circuit debugging: Re check operation
Electronics Design Laboratory Lecture #10 Electronics Design Laboratory 1 Lessons from Experiment 4 Code debugging: use print statements and serial monitor window Circuit debugging: Re check operation
Antennas Multiple antenna systems
 Channel Modelling ETIM10 Lecture no: 8 Antennas Multiple antenna systems Fredrik Tufvesson Department of Electrical and Information Technology Lund University, Sweden Fredrik.Tufvesson@eit.lth.se 2012-02-13
Channel Modelling ETIM10 Lecture no: 8 Antennas Multiple antenna systems Fredrik Tufvesson Department of Electrical and Information Technology Lund University, Sweden Fredrik.Tufvesson@eit.lth.se 2012-02-13
DIGITAL BEAM-FORMING ANTENNA OPTIMIZATION FOR REFLECTOR BASED SPACE DEBRIS RADAR SYSTEM
 DIGITAL BEAM-FORMING ANTENNA OPTIMIZATION FOR REFLECTOR BASED SPACE DEBRIS RADAR SYSTEM A. Patyuchenko, M. Younis, G. Krieger German Aerospace Center (DLR), Microwaves and Radar Institute, Muenchner Strasse
DIGITAL BEAM-FORMING ANTENNA OPTIMIZATION FOR REFLECTOR BASED SPACE DEBRIS RADAR SYSTEM A. Patyuchenko, M. Younis, G. Krieger German Aerospace Center (DLR), Microwaves and Radar Institute, Muenchner Strasse
Interference of Chirp Sequence Radars by OFDM Radars at 77 GHz
 Interference of Chirp Sequence Radars by OFDM Radars at 77 GHz Christina Knill, Jonathan Bechter, and Christian Waldschmidt 2017 IEEE. Personal use of this material is permitted. Permission from IEEE must
Interference of Chirp Sequence Radars by OFDM Radars at 77 GHz Christina Knill, Jonathan Bechter, and Christian Waldschmidt 2017 IEEE. Personal use of this material is permitted. Permission from IEEE must
mm-wave Transceiver Challenges for the 5G and 60GHz Standards Prof. Emanuel Cohen Technion
 mm-wave Transceiver Challenges for the 5G and 60GHz Standards Prof. Emanuel Cohen Technion November 11, 11, 2015 2015 1 mm-wave advantage Why is mm-wave interesting now? Available Spectrum 7 GHz of virtually
mm-wave Transceiver Challenges for the 5G and 60GHz Standards Prof. Emanuel Cohen Technion November 11, 11, 2015 2015 1 mm-wave advantage Why is mm-wave interesting now? Available Spectrum 7 GHz of virtually
EITN90 Radar and Remote Sensing Lab 2
 EITN90 Radar and Remote Sensing Lab 2 February 8, 2018 1 Learning outcomes This lab demonstrates the basic operation of a frequency modulated continuous wave (FMCW) radar, capable of range and velocity
EITN90 Radar and Remote Sensing Lab 2 February 8, 2018 1 Learning outcomes This lab demonstrates the basic operation of a frequency modulated continuous wave (FMCW) radar, capable of range and velocity
ECE 476/ECE 501C/CS Wireless Communication Systems Winter Lecture 6: Fading
 ECE 476/ECE 501C/CS 513 - Wireless Communication Systems Winter 2004 Lecture 6: Fading Last lecture: Large scale propagation properties of wireless systems - slowly varying properties that depend primarily
ECE 476/ECE 501C/CS 513 - Wireless Communication Systems Winter 2004 Lecture 6: Fading Last lecture: Large scale propagation properties of wireless systems - slowly varying properties that depend primarily
ECE 476/ECE 501C/CS Wireless Communication Systems Winter Lecture 6: Fading
 ECE 476/ECE 501C/CS 513 - Wireless Communication Systems Winter 2005 Lecture 6: Fading Last lecture: Large scale propagation properties of wireless systems - slowly varying properties that depend primarily
ECE 476/ECE 501C/CS 513 - Wireless Communication Systems Winter 2005 Lecture 6: Fading Last lecture: Large scale propagation properties of wireless systems - slowly varying properties that depend primarily
Detection of Multipath Propagation Effects in SAR-Tomography with MIMO Modes
 Detection of Multipath Propagation Effects in SAR-Tomography with MIMO Modes Tobias Rommel, German Aerospace Centre (DLR), tobias.rommel@dlr.de, Germany Gerhard Krieger, German Aerospace Centre (DLR),
Detection of Multipath Propagation Effects in SAR-Tomography with MIMO Modes Tobias Rommel, German Aerospace Centre (DLR), tobias.rommel@dlr.de, Germany Gerhard Krieger, German Aerospace Centre (DLR),
GET10B Radar Measurement Basics- Spectrum Analysis of Pulsed Signals. Copyright 2001 Agilent Technologies, Inc.
 GET10B Radar Measurement Basics- Spectrum Analysis of Pulsed Signals Copyright 2001 Agilent Technologies, Inc. Agenda: Power Measurements Module #1: Introduction Module #2: Power Measurements Module #3:
GET10B Radar Measurement Basics- Spectrum Analysis of Pulsed Signals Copyright 2001 Agilent Technologies, Inc. Agenda: Power Measurements Module #1: Introduction Module #2: Power Measurements Module #3:
Simulation the Hybrid Combinations of 24GHz and 77GHz Automotive Radar
 Simulation the Hybrid Combinations of 4GHz and 77GHz Automotive Radar Yahya S. H. Khraisat Electrical and Electronics Department Al-Huson University College/ Al-Balqa' AppliedUniversity P.O. Box 5, 5,
Simulation the Hybrid Combinations of 4GHz and 77GHz Automotive Radar Yahya S. H. Khraisat Electrical and Electronics Department Al-Huson University College/ Al-Balqa' AppliedUniversity P.O. Box 5, 5,
802.11ax Design Challenges. Mani Krishnan Venkatachari
 802.11ax Design Challenges Mani Krishnan Venkatachari Wi-Fi: An integral part of the wireless landscape At the center of connected home Opening new frontiers for wireless connectivity Wireless Display
802.11ax Design Challenges Mani Krishnan Venkatachari Wi-Fi: An integral part of the wireless landscape At the center of connected home Opening new frontiers for wireless connectivity Wireless Display
AVERNA ACCELERATES PRODUCTION TESTING FOR AUTOMOTIVE RADAR
 CASE STUDY / Automotive DESIGN NPI PRODUCTION REPAIR AVERNA ACCELERATES PRODUCTION TESTING FOR AUTOMOTIVE RADAR AutomotiveRadarTesting Case Study_201410.indd 1 2014-10-10 16:51 CASE STUDY / Automotive
CASE STUDY / Automotive DESIGN NPI PRODUCTION REPAIR AVERNA ACCELERATES PRODUCTION TESTING FOR AUTOMOTIVE RADAR AutomotiveRadarTesting Case Study_201410.indd 1 2014-10-10 16:51 CASE STUDY / Automotive
Effects to develop a high-performance millimeter-wave radar with RF CMOS technology
 Effects to develop a high-performance millimeter-wave radar with RF CMOS technology Yasuyoshi OKITA Kiyokazu SUGAI Kazuaki HAMADA Yoji OHASHI Tetsuo SEKI High Resolution Angle-widening Abstract We are
Effects to develop a high-performance millimeter-wave radar with RF CMOS technology Yasuyoshi OKITA Kiyokazu SUGAI Kazuaki HAMADA Yoji OHASHI Tetsuo SEKI High Resolution Angle-widening Abstract We are
HR001118S0020 Millimeter-Wave Digital Arrays (MIDAS) Frequently Asked Questions (FAQ) March 12, 2018
 Frequently Asked Questions (FAQ) March 12, 2018") HR001118S0020 Millimeter-Wave Digital Arrays (MIDAS) Frequently Asked Questions (FAQ) March 12, 2018 Q1: Will there be multiple awards? A1: Yes, multiple awards are expected (page 4 of BAA). Q2: Will there
HR001118S0020 Millimeter-Wave Digital Arrays (MIDAS) Frequently Asked Questions (FAQ) March 12, 2018 Q1: Will there be multiple awards? A1: Yes, multiple awards are expected (page 4 of BAA). Q2: Will there
FDM based MIMO Spatio-Temporal Channel Sounder
 FDM based MIMO Spatio-Temporal Channel Sounder Graduate School of Science and Technology, Kazuhiro Kuroda, Kei Sakaguchi, Jun-ichi Takada, Kiyomichi Araki Motivation The performance of MIMO communication
FDM based MIMO Spatio-Temporal Channel Sounder Graduate School of Science and Technology, Kazuhiro Kuroda, Kei Sakaguchi, Jun-ichi Takada, Kiyomichi Araki Motivation The performance of MIMO communication
Signal Processing and Display of LFMCW Radar on a Chip
 Signal Processing and Display of LFMCW Radar on a Chip Abstract The tremendous progress in embedded systems helped in the design and implementation of complex compact equipment. This progress may help
Signal Processing and Display of LFMCW Radar on a Chip Abstract The tremendous progress in embedded systems helped in the design and implementation of complex compact equipment. This progress may help
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS. Sergii Bykov Technical Lead Machine Learning 12 Oct 2017
 23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
ADAPTIVE ANTENNAS. TYPES OF BEAMFORMING
 ADAPTIVE ANTENNAS TYPES OF BEAMFORMING 1 1- Outlines This chapter will introduce : Essential terminologies for beamforming; BF Demonstrating the function of the complex weights and how the phase and amplitude
ADAPTIVE ANTENNAS TYPES OF BEAMFORMING 1 1- Outlines This chapter will introduce : Essential terminologies for beamforming; BF Demonstrating the function of the complex weights and how the phase and amplitude
Systems characteristics of automotive radars operating in the frequency band GHz for intelligent transport systems applications
 Recommendation ITU-R M.257-1 (1/218) Systems characteristics of automotive s operating in the frequency band 76-81 GHz for intelligent transport systems applications M Series Mobile, radiodetermination,
Recommendation ITU-R M.257-1 (1/218) Systems characteristics of automotive s operating in the frequency band 76-81 GHz for intelligent transport systems applications M Series Mobile, radiodetermination,
Multi-function Phased Array Radars (MPAR)
") Multi-function Phased Array Radars (MPAR) Satyanarayana S, General Manager - RF systems, Mistral Solutions Pvt. Ltd., Bangalore, Karnataka, satyanarayana.s@mistralsolutions.com Abstract In this paper,
Multi-function Phased Array Radars (MPAR) Satyanarayana S, General Manager - RF systems, Mistral Solutions Pvt. Ltd., Bangalore, Karnataka, satyanarayana.s@mistralsolutions.com Abstract In this paper,
A Bistatic HF Radar for Current Mapping and Robust Ship Tracking
 A Bistatic HF Radar for Current Mapping and Robust Ship Tracking Dennis Trizna Imaging Science Research, Inc. V. 703-801-1417 dennis @ isr-sensing.com www.isr-sensing.com Objective: Develop methods for
A Bistatic HF Radar for Current Mapping and Robust Ship Tracking Dennis Trizna Imaging Science Research, Inc. V. 703-801-1417 dennis @ isr-sensing.com www.isr-sensing.com Objective: Develop methods for
NIST Activities in Wireless Coexistence
 NIST Activities in Wireless Coexistence Communications Technology Laboratory National Institute of Standards and Technology Bill Young 1, Jason Coder 2, Dan Kuester, and Yao Ma 1 william.young@nist.gov,
NIST Activities in Wireless Coexistence Communications Technology Laboratory National Institute of Standards and Technology Bill Young 1, Jason Coder 2, Dan Kuester, and Yao Ma 1 william.young@nist.gov,
INTRODUCTION TO RADAR SIGNAL PROCESSING
 INTRODUCTION TO RADAR SIGNAL PROCESSING Christos Ilioudis University of Strathclyde c.ilioudis@strath.ac.uk Overview History of Radar Basic Principles Principles of Measurements Coherent and Doppler Processing
INTRODUCTION TO RADAR SIGNAL PROCESSING Christos Ilioudis University of Strathclyde c.ilioudis@strath.ac.uk Overview History of Radar Basic Principles Principles of Measurements Coherent and Doppler Processing
Adaptive SAR Results with the LiMIT Testbed
 Adaptive SAR Results with the LiMIT Testbed Gerald Benitz Adaptive Sensor Array Processing Workshop 7 June 2005 999999-1 Outline LiMIT collection platform SAR sidelobe recovery Electronic Protection (EP)
Adaptive SAR Results with the LiMIT Testbed Gerald Benitz Adaptive Sensor Array Processing Workshop 7 June 2005 999999-1 Outline LiMIT collection platform SAR sidelobe recovery Electronic Protection (EP)
White paper on CAR28T millimeter wave radar
 White paper on CAR28T millimeter wave radar Hunan Nanoradar Science and Technology Co., Ltd. Version history Date Version Version description 2017-07-13 1.0 the 1st version of white paper on CAR28T Contents
White paper on CAR28T millimeter wave radar Hunan Nanoradar Science and Technology Co., Ltd. Version history Date Version Version description 2017-07-13 1.0 the 1st version of white paper on CAR28T Contents
Calibration Concepts of Multi-Channel Spaceborne SAR
 DLR.de Chart 1 > CEOS Workshop 2016 > Tobias Rommel > September 7 th, 2016 Calibration Concepts of Multi-Channel Spaceborne SAR T. Rommel, F. Queiroz de Almeida, S. Huber, M. Jäger, G. Krieger, C. Laux,
DLR.de Chart 1 > CEOS Workshop 2016 > Tobias Rommel > September 7 th, 2016 Calibration Concepts of Multi-Channel Spaceborne SAR T. Rommel, F. Queiroz de Almeida, S. Huber, M. Jäger, G. Krieger, C. Laux,
Radar Scanning for Development of Vehicle and Pedestrian Surrogate Targets for Vehicle Pre-Collision System (PCS) Testing
 Testing") Radar Scanning for Development of Vehicle and Pedestrian Surrogate Targets for Vehicle Pre-Collision System (PCS) Testing Rini Sherony Collaborative Safety Research Center Toyota Motor Engineering & Manufacturing
Radar Scanning for Development of Vehicle and Pedestrian Surrogate Targets for Vehicle Pre-Collision System (PCS) Testing Rini Sherony Collaborative Safety Research Center Toyota Motor Engineering & Manufacturing
Digital Sounder: HF Diagnostics Module:Ionosonde Dual Channel ( ) Eight Channel ( )
 Eight Channel ( )") CENTER FOR REMOTE SE NSING, INC. Digital Sounder: HF Diagnostics Module:Ionosonde Dual Channel (001-2000) Eight Channel (004-2006) 2010 Center for Remote Sensing, Inc. All specifications subject to change
CENTER FOR REMOTE SE NSING, INC. Digital Sounder: HF Diagnostics Module:Ionosonde Dual Channel (001-2000) Eight Channel (004-2006) 2010 Center for Remote Sensing, Inc. All specifications subject to change
Comparison of Two Detection Combination Algorithms for Phased Array Radars
 Comparison of Two Detection Combination Algorithms for Phased Array Radars Zhen Ding and Peter Moo Wide Area Surveillance Radar Group Radar Sensing and Exploitation Section Defence R&D Canada Ottawa, Canada
Comparison of Two Detection Combination Algorithms for Phased Array Radars Zhen Ding and Peter Moo Wide Area Surveillance Radar Group Radar Sensing and Exploitation Section Defence R&D Canada Ottawa, Canada
RANGE resolution and dynamic range are the most important
 INTL JOURNAL OF ELECTRONICS AND TELECOMMUNICATIONS, 2012, VOL. 58, NO. 2, PP. 135 140 Manuscript received August 17, 2011; revised May, 2012. DOI: 10.2478/v10177-012-0019-1 High Resolution Noise Radar
INTL JOURNAL OF ELECTRONICS AND TELECOMMUNICATIONS, 2012, VOL. 58, NO. 2, PP. 135 140 Manuscript received August 17, 2011; revised May, 2012. DOI: 10.2478/v10177-012-0019-1 High Resolution Noise Radar
Multi Band Passive Forward Scatter Radar
 Multi Band Passive Forward Scatter Radar S. Hristov, A. De Luca, M. Gashinova, A. Stove, M. Cherniakov EESE, University of Birmingham Birmingham, B15 2TT, UK m.cherniakov@bham.ac.uk Outline Multi-Band
Multi Band Passive Forward Scatter Radar S. Hristov, A. De Luca, M. Gashinova, A. Stove, M. Cherniakov EESE, University of Birmingham Birmingham, B15 2TT, UK m.cherniakov@bham.ac.uk Outline Multi-Band
Radar Market Outlook. Mats Carlsson CTO. Sivers IMA Partner Event - June
 Radar Market Outlook Mats Carlsson CTO Sivers IMA Partner Event - June 2017 1 Why radar? Competing non-contact technologies Vision / cameras Time of flight Stereoscopic Lasers Ultrasound Radar offers robust
Radar Market Outlook Mats Carlsson CTO Sivers IMA Partner Event - June 2017 1 Why radar? Competing non-contact technologies Vision / cameras Time of flight Stereoscopic Lasers Ultrasound Radar offers robust
White paper on CAR150 millimeter wave radar
 White paper on CAR150 millimeter wave radar Hunan Nanoradar Science and Technology Co.,Ltd. Version history Date Version Version description 2017-02-23 1.0 The 1 st version of white paper on CAR150 Contents
White paper on CAR150 millimeter wave radar Hunan Nanoradar Science and Technology Co.,Ltd. Version history Date Version Version description 2017-02-23 1.0 The 1 st version of white paper on CAR150 Contents
Exploring Trends in Technology and Testing in Satellite Communications
 Exploring Trends in Technology and Testing in Satellite Communications Aerospace Defense Symposium Giuseppe Savoia Keysight Technologies Agenda Page 2 Evolving military and commercial satellite communications
Exploring Trends in Technology and Testing in Satellite Communications Aerospace Defense Symposium Giuseppe Savoia Keysight Technologies Agenda Page 2 Evolving military and commercial satellite communications
RF and Microwave Test and Design Roadshow 5 Locations across Australia and New Zealand
 RF and Microwave Test and Design Roadshow 5 Locations across Australia and New Zealand ni.com Design and test of RADAR systems Agenda Radar Overview Tools Overview VSS LabVIEW PXI Design and Simulation
RF and Microwave Test and Design Roadshow 5 Locations across Australia and New Zealand ni.com Design and test of RADAR systems Agenda Radar Overview Tools Overview VSS LabVIEW PXI Design and Simulation
Multiple Antenna Systems in WiMAX
 WHITEPAPER An Introduction to MIMO, SAS and Diversity supported by Airspan s WiMAX Product Line We Make WiMAX Easy Multiple Antenna Systems in WiMAX An Introduction to MIMO, SAS and Diversity supported
WHITEPAPER An Introduction to MIMO, SAS and Diversity supported by Airspan s WiMAX Product Line We Make WiMAX Easy Multiple Antenna Systems in WiMAX An Introduction to MIMO, SAS and Diversity supported
Prototype Software-based Receiver for Remote Sensing using Reflected GPS Signals. Dinesh Manandhar The University of Tokyo
 Prototype Software-based Receiver for Remote Sensing using Reflected GPS Signals Dinesh Manandhar The University of Tokyo dinesh@qzss.org 1 Contents Background Remote Sensing Capability System Architecture
Prototype Software-based Receiver for Remote Sensing using Reflected GPS Signals Dinesh Manandhar The University of Tokyo dinesh@qzss.org 1 Contents Background Remote Sensing Capability System Architecture
Digital Baseband Architecture in AR1243/AR1642 Automotive Radar Devices
 Application Report Lit. Number June 015 Digital Baseband Architecture in AR143/AR164 Automotive Radar Devices Sriram Murali, Karthik Ramasubramanian Wireless Connectivity Solutions ABSTRACT This application
Application Report Lit. Number June 015 Digital Baseband Architecture in AR143/AR164 Automotive Radar Devices Sriram Murali, Karthik Ramasubramanian Wireless Connectivity Solutions ABSTRACT This application
MMW sensors for Industrial, safety, Traffic and security applications
 MMW sensors for Industrial, safety, Traffic and security applications Philip Avery Director, Navtech Radar Ltd. Overview Introduction to Navtech Radar and what we do. A brief explanation of how FMCW radars
MMW sensors for Industrial, safety, Traffic and security applications Philip Avery Director, Navtech Radar Ltd. Overview Introduction to Navtech Radar and what we do. A brief explanation of how FMCW radars
9 Best Practices for Optimizing Your Signal Generator Part 2 Making Better Measurements
 9 Best Practices for Optimizing Your Signal Generator Part 2 Making Better Measurements In consumer wireless, military communications, or radar, you face an ongoing bandwidth crunch in a spectrum that
9 Best Practices for Optimizing Your Signal Generator Part 2 Making Better Measurements In consumer wireless, military communications, or radar, you face an ongoing bandwidth crunch in a spectrum that
Space Frequency Coordination Group
 Space Frequency Coordination Group Report SFCG 38-1 POTENTIAL RFI TO EESS (ACTIVE) CLOUD PROFILE RADARS IN 94.0-94.1 GHZ FREQUENCY BAND FROM OTHER SERVICES Abstract This new SFCG report analyzes potential
Space Frequency Coordination Group Report SFCG 38-1 POTENTIAL RFI TO EESS (ACTIVE) CLOUD PROFILE RADARS IN 94.0-94.1 GHZ FREQUENCY BAND FROM OTHER SERVICES Abstract This new SFCG report analyzes potential
CSC344 Wireless and Mobile Computing. Department of Computer Science COMSATS Institute of Information Technology
 CSC344 Wireless and Mobile Computing Department of Computer Science COMSATS Institute of Information Technology Wireless Physical Layer Concepts Part III Noise Error Detection and Correction Hamming Code
CSC344 Wireless and Mobile Computing Department of Computer Science COMSATS Institute of Information Technology Wireless Physical Layer Concepts Part III Noise Error Detection and Correction Hamming Code
From Antenna to Bits:
 From Antenna to Bits: Wireless System Design with MATLAB and Simulink Cynthia Cudicini Application Engineering Manager MathWorks cynthia.cudicini@mathworks.fr 1 Innovations in the World of Wireless Everything
From Antenna to Bits: Wireless System Design with MATLAB and Simulink Cynthia Cudicini Application Engineering Manager MathWorks cynthia.cudicini@mathworks.fr 1 Innovations in the World of Wireless Everything
Experimental mmwave 5G Cellular System
 Experimental mmwave 5G Cellular System Mark Cudak Principal Research Specialist Tokyo Bay Summit, 23 rd of July 2015 1 Nokia Solutions and Networks 2015 Tokyo Bay Summit 2015 Mark Cudak Collaboration partnership
Experimental mmwave 5G Cellular System Mark Cudak Principal Research Specialist Tokyo Bay Summit, 23 rd of July 2015 1 Nokia Solutions and Networks 2015 Tokyo Bay Summit 2015 Mark Cudak Collaboration partnership
MIMO Parallel Channel Sounder
 MIMO Parallel Channel Sounder Dr. Yang Yang Shanghai Research Center for Wireless Communications Key Lab of Wireless Sensor Network and Communication Chinese Academy of Sciences 上海市浦东新区海科路 100 号 8 号楼 4
MIMO Parallel Channel Sounder Dr. Yang Yang Shanghai Research Center for Wireless Communications Key Lab of Wireless Sensor Network and Communication Chinese Academy of Sciences 上海市浦东新区海科路 100 号 8 号楼 4
WHITE PAPER. Hybrid Beamforming for Massive MIMO Phased Array Systems
 WHITE PAPER Hybrid Beamforming for Massive MIMO Phased Array Systems Introduction This paper demonstrates how you can use MATLAB and Simulink features and toolboxes to: 1. Design and synthesize complex
WHITE PAPER Hybrid Beamforming for Massive MIMO Phased Array Systems Introduction This paper demonstrates how you can use MATLAB and Simulink features and toolboxes to: 1. Design and synthesize complex
ECE 476/ECE 501C/CS Wireless Communication Systems Winter Lecture 6: Fading
 ECE 476/ECE 501C/CS 513 - Wireless Communication Systems Winter 2003 Lecture 6: Fading Last lecture: Large scale propagation properties of wireless systems - slowly varying properties that depend primarily
ECE 476/ECE 501C/CS 513 - Wireless Communication Systems Winter 2003 Lecture 6: Fading Last lecture: Large scale propagation properties of wireless systems - slowly varying properties that depend primarily
MULTI-CHANNEL SAR EXPERIMENTS FROM THE SPACE AND FROM GROUND: POTENTIAL EVOLUTION OF PRESENT GENERATION SPACEBORNE SAR
 3 nd International Workshop on Science and Applications of SAR Polarimetry and Polarimetric Interferometry POLinSAR 2007 January 25, 2007 ESA/ESRIN Frascati, Italy MULTI-CHANNEL SAR EXPERIMENTS FROM THE
3 nd International Workshop on Science and Applications of SAR Polarimetry and Polarimetric Interferometry POLinSAR 2007 January 25, 2007 ESA/ESRIN Frascati, Italy MULTI-CHANNEL SAR EXPERIMENTS FROM THE
Application Note. StarMIMO. RX Diversity and MIMO OTA Test Range
 Application Note StarMIMO RX Diversity and MIMO OTA Test Range Contents Introduction P. 03 StarMIMO setup P. 04 1/ Multi-probe technology P. 05 Cluster vs Multiple Cluster setups Volume vs Number of probes
Application Note StarMIMO RX Diversity and MIMO OTA Test Range Contents Introduction P. 03 StarMIMO setup P. 04 1/ Multi-probe technology P. 05 Cluster vs Multiple Cluster setups Volume vs Number of probes
A Novel Range Detection Method for 60GHz LFMCW Radar
 A ovel Range Detection Method for 6GHz LFMCW Radar Yizhong Wu,YingBao, Zhiguo Shi, Jiming Chen and Youxian Sun Department of Control Science and Engineering, Zhejiang University Email:{yzwu, jmchen, yxsun}@iipc.zju.edu.cn
A ovel Range Detection Method for 6GHz LFMCW Radar Yizhong Wu,YingBao, Zhiguo Shi, Jiming Chen and Youxian Sun Department of Control Science and Engineering, Zhejiang University Email:{yzwu, jmchen, yxsun}@iipc.zju.edu.cn
Radar System Design Considerations -- System Modeling Findings (MOS-AK Conference Hangzhou 2017)
") Radar System Design Considerations -- System Modeling Findings (MOS-AK Conference Hangzhou 2017) Silicon Radar GmbH Im Technologiepark 1 15236 Frankfurt (Oder) Germany Outline 1 Introduction to Short Distance
Radar System Design Considerations -- System Modeling Findings (MOS-AK Conference Hangzhou 2017) Silicon Radar GmbH Im Technologiepark 1 15236 Frankfurt (Oder) Germany Outline 1 Introduction to Short Distance