GPS NAVIGATION FOR INERTIAL MOTION AND FORMATION CONTROL, RENDEZVOUS AND PROXIMITY OPERATIONS A BRIEF REVIEW OF RECENT LITERATURE
|
|
|
- Rosa Wright
- 5 years ago
- Views:
Transcription
1 GPS NAVIGATION FOR INERTIAL MOTION AND FORMATION CONTROL, RENDEZVOUS AND PROXIMITY OPERATIONS A BRIEF REVIEW OF RECENT LITERATURE Hari B. Hablani, Professor, Department of Aerospace Engineering, Indian Institute of Technology, Bombay July 28, 2012
2 Acknowledgement 2 The material presented here is entirely from papers published by other authors. I greatly appreciate, indeed admire, their creativity and insights. I have stated the sources of the figures and tables individually, but in case of omission, I extend my apology. In this presentation, no claim of originality on my part is intended.
3 Highlights 3 Real-time navigation for formation control of remote sensing LEO satellites: Ionospheric delay for LEO satellites Mathematical modeling of signals, elimination of iono delay with GRAPHIC and estimation of associated biases Absolute navigation performance Relative navigation for formation control: Between-receiver, between-satellite carrier phase difference measurements Estimation of integer ambiguities with LAMBDA Estimation of vertical iono delay Hardware-in-the-loop simulation of formation control: Performance NASA Global Differential GPS and TDRSS Augmentation Service for Satellites (TASS) Precision real-time navigation with real-time GPS orbits provided by TASS Real missions: PRISMA, TerraSAR-X TanDEM-X Eccentricity/inclination vector seperation for LEO satellites in formation Absolute and relative nav accuracies Imminent navigation services in India: GAGAN and IRNSS Concluding remarks
4 Loiselet, M., Stricker, N., Menard, Y., and Luntama, J.-P., GRAS MetOp s GPS-Based Atmospheric Sounder, ESA Bulletin, 102, May
 = mapping function to determine iono-delay at any elevation angle [Leung and")
5 Montenbruck and Gill, Ionospheric correction for GPS Tracking of LEO Satellites, The Journal of Navigation, 2002, vol. 55, pp I 0 = vertical path delay, E = elevation angle of the satellite m(e) = mapping function to determine iono-delay at any elevation angle [Leung and Montenbruck, AIAA JGCD, vol. 28, No.2, 2005, pp ]

6 [Leung, S., and Montenbruck, O., Real-time navigation, AIAA JGCD, vol. 28, no. 2, pp ] 6

7 [Leung, S., and Montenbruck, O., Real-time navigation, AIAA JGCD, vol. 28, no. 2, pp ] 7
8 8 Local (Absolute, Inertial) Spacecraft Navigation with Single-Frequency Receiver using Reduced Orbit Determination and GRAPHIC ( Group and Phase Ionospheric Correction) [Leung, S., and Montenbruck, O., Real-time navigation, AIAA JGCD, vol. 28, no. 2, pp ] Because of ionospheric path delays, the single-frequency position solutions of GPS receivers could be in error by several tens of meters, and may have a radial error of several meters. Velocity solution offered by the receiver is accurate up to 1 cm/s. These absolute nav accuracies are inadequate for formation flying, which requires a smooth, continuous, and accurate onboard position and velocity knowledge Hence, a dedicated Kalman filter is required to determine the spacecraft s PVT. Trajectory Model: Compromise between computational efficiency and propagation accuracy leads to 30x30 JGM- 3 gravity field model. Compared to a 50x50 model, 1.5 m accuracy is achieved in position prediction in 30 minutes for a near polar orbit at a 450 km altitude. Drag, luni-solar gravity, radiation pressure are all ignored, but they are estimated as empirical acceleration a emp in radial, transverse, and normal direction [a R a T a N ] State updates and predictions only once every seconds Propagation (time-update) of the state vector is done with RK4 combined with Richardson extrapolation
9 GRAPHIC Measurements and State Vector Estimate [Leung, S., and Montenbruck, O., Real-time navigation, AIAA JGCD, vol. 28, no. 2, pp ] (cont d) 9 GPS receiver: Orion-S, 12 channels, L1 C/A code and carrier Ionospheric-Free GRAPHIC Measurement [Yunck, JPL, 1995]: Code and carrier phase (CP) measurements of single-frequency receiver are averaged: ρ = (ρ C/A + ρ L1 )/2 = ρ + c(δt δt GPS ) + b which is an iono-free measurement with half the code noise but with an unknown bias b (1/2 * wavelength * integer ambiguity of the CP measurement). Neglecting the iono delay, an approximate value of b to initialize state vector estimate is b (ρl1 ρc/a)/2 Because Orion-S has 12 channels, up to 12 GPS satellites will be tracked and there will be as many unknown biases b, forming a 12x1 vector B State vector x consists of 22 parameters x = (y, a emp, cδt, B) where 6x1 vector y consists of spacecraft position and velocity. The initial condition of x is: y = GPS provided solution, a emp = 0, zero clock offset, and B as specified above.
10 Error Covariance Matrix, State Transition Matrix, Process Noise Matrix [Leung, S., and Montenbruck, O., Real-time navigation, AIAA JGCD, vol. 28, no. 2, pp ] (cont d) 10 The initial value of the state estimate error covariance matrix P: diagonal with standard deviation of 10 m (position, clock, and biases), 0.1 m/s (velocity), 5e-7 m/s 2 (acceleration) Because measurement intervals are seconds, an interpolating polynomial is required for a continuous representation of the trajectory for relative navigation; a quintic Hermite polynomial is used for this purpose. State transition matrix: For the state vector x = (y, a emp, cδt, B) Φyy = y(ti )/ y(ti 1) accounting for the J 2 effect Φya = y(ti )/ aemp(ti 1) Process noise matrix Q for filter update interval seconds: position: (10-3 m) 2, velocity: (10-6 m/s) 2, acceleration: (2.5*10-6 m/s 2 ) 2 ; clock: (3 m) 2
11 Estimated Measurements [Leung, S., and Montenbruck, O., Real-time navigation, AIAA JGCD, vol. 28, no. 2, pp ] (cont d) 11 The measurement update is performed in a sequence of scalar update; this avoids large matrix operations Because the measurements are ρ = (ρ C/A + ρ L1 )/2 = ρ + c(δt δt GPS ) + b for all the satellites in view, estimated measurements g(x) are formed using the latest position of the LEO satellite, GPS satellites broadcast ephemeris parameters, receiver and GPS clock offsets, and GRAPHIC bias. Broadcast ephemeris errors contribute signal-in-space range error of about m. Linearization of measurements for extended Kalman filter lead to the partial derivative vector shown on the next chart relative to the state vector. The Measurement standard deviation is equal to ½ * σ (code noise). The rest of the Kalman filtering is straightforward
12 Hardware-in-the-loop simulation results [Leung, S., and Montenbruck, O., Real-time navigation, AIAA JGCD, vol. 28, no. 2, pp ] 12 A formation of four spacecraft at 450 km altitude. See earlier Table 3 GPS signals were generated with a 48-channel Spirent STR4760 signal simulator
13 [Leung, S., and Montenbruck, O., Real-time navigation, AIAA JGCD, vol. 28, no. 2, pp ] (cont d) 13
14 Leung, S., and Montenbruck, O., High Precision Real-Time Navigation for Spacecraft Formation Flying, ION GPS/GNSS 2003, Sept. 2003, Portland, OR; reprinted with permission 14 Reprinted with permission of Montenbruck
15 Leung, S., and Montenbruck, O., High Precision Real-Time Navigation for Spacecraft Formation Flying, ION GPS/GNSS 2003, Sept. 2003, Portland, OR; reprinted with permission 15
16 Leung, S., and Montenbruck, O., High Precision Real-Time Navigation for Spacecraft Formation Flying, ION GPS/GNSS 2003, Sept. 2003, Portland, OR; reprinted with permission 16
17 Leung, S., and Montenbruck, O., High Precision Real-Time Navigation for Spacecraft Formation Flying, ION GPS/GNSS 2003, Sept. 2003, Portland, OR; absolute Navigation: Results Summary 17 For absolute navigation, the system achieved an accuracy of 2.98 m in position, and 0.34 cm/s in velocity. Compare this with GPS receiver nav solution which has a typical error of 15 m and 5 cm/s This 5 times higher accuracy is attributed to GRAPHIC which eliminates iono delay. GRAPHIC introduces biases, but filter is able to estimate them. This absolute nav accuracy is comparable to the broadcast ephemeris errors of GPS satellites. The filter takes about an orbital period to converge to steady-state in position, and ½ orbital period for velocity, when the measurement is at 20 s interval. This long convergence period is due to the GPS ephemeris errors and GRAPHIC biases.

18 Montenbruck, et al., A Real-time kinematic GPS sensor for spacecraft relative navigation, Aerospace Science and Technology, vol. 6, 2002, pp
19 Relative Navigation: Trajectory Model [Leung, S., and Montenbruck, O., Real-time navigation, AIAA JGCD, vol. 28, no. 2, pp ] (cont d) 19 Kalman filter estimates relative position and velocity of a remote spacecraft from differential GPS carrier phase measurements. The absolute state vector of the local spacecraft at the measurement is assumed to be known and can be calculated with interpolation polynomials The absolute nav accuracy of ~ 3 m would cause a maximum error of ~1.5 mm to rel-nav accurcy for a 10 km baseline. Trajectory Model: CW equations inadequate, so develop a numerical trajectory model Given the inertial PV of spacecraft A and relative PV of spacecraft B at t i, propagate inertial PV of both using RK4 with Richardson extrapolation to t i+1, and then determine the relative PV of spacecraft B at t i+1. JGM-3 gravity model with spherical harmonics up to degree and order 10 is adequate for this propagation. No empirical accelerations need to be considered for relative PV, but if the two spacecraft are different, differential atmospheric drag should be considered.
20 Relative Navigation: Between-receiver, between-satellite carrier phase measurement differences [Leung, S., and Montenbruck, O., Real-time navigation, AIAA JGCD, vol. 28, no. 2, pp ] 20
21 Relative Navigation: Measurement Model [Leung, S., and Montenbruck, O., Real-time navigation, AIAA JGCD, vol. 28, no. 2, pp ] 21 Between-receiver, between-satellite difference defined by Eq. (14) below is called double-difference (DD). The difference between receivers eliminates the GPS satellites ephemeris errors. Difference across GPS satellites eliminates the user clock error. If the baseline is long, such as 10 km, the iono delays at the two receivers may not be the same, so differencing it will leave some residual iono delay. DD carrier phase (CP) is related to DD range, DD integer ambiguity, and DD ionospheric delay as shown in Eq. (15). The DD carrier phase measurement will have some measurement noise. The DD CP ambiguity is fixed after initial convergence of the Kalman filter.
22 Relative Nav Kalman Filter State Vector [Leung, S., and Montenbruck, O., Real-time navigation, AIAA JGCD, vol. 28, no. 2, pp ] 22 This state vector, denoted x, shown below, consists of a maximum 18 parameters: Δy: 6x1 relative position and velocity vector I 0 vertical path iono delay N: 11x1 double-difference carrier phase ambiguities for the 12-channel GPS receiver I 0 and N are constant and are not propagated. Initial values for relative position and velocity are obtained from differential pseudoranges and carrier phase based differential range rates using the kinematic navigation algorithm Coarse ambiguities are obtained from the difference of code and carrier observations; then apply Least-Squares Ambiguity Decorrelation Adjustment (LAMBDA) method) Kalman Filter State Vector:
23 Relative Nav Kalman Filter Operation: Process Noise Matrix Q, Initial Error Covariance Matrix, and Fixing Integer Ambiguities [Leung, S., and Montenbruck, O., op cit] 23 Q is a diagonal matrix, with standard deviations of the state vector parameters as: 0.1 mm for relative position; 0.01 μm/s for relative position; these are for the two spacecraft experiencing the same drag acceleration I 0 and N are constant, so the diagonal entries of Q for these are zero. State estimate error covariance matrix P(t=0): Standard deviation for relative position and integer ambiguities: 2 m Velocity: 0.1 m/s Vertical ionospheric path delay: 3 m Carrier phase ambiguities are fixed if the float ambiguity estimate lies within 2% of an integer cycle, and the variation in the float ambiguity estimate within three consecutive filter updates is < 1% of an L1 cycle. If a cycle slip occurs for some pair of GPS satellites, the filter restimates the integer ambiguity for this pair. If there is a communication blackout, the filter will propagate its state using dynamic model.
24 [Leung, S., and Montenbruck, O., op cit] 24 GPS broadcast ephemeris errors: offsets of up to 5 m (2.5 m rms) in radial, tangential, and Normal direction; no multipath errors Ionosphere: Constant electron Density 20*10 16 e - /m 2 (3.2 m Vertical path delay) EKF update: 30 s
25 [Leung, S., and Montenbruck, O., op cit] 25
26 Conclusions [Leung, S., and Montenbruck, O., JGCD 2005, op cit] 26 Single-frequency GPS-based real-time navigation for formation flying of LEO satellites in a decentralized architecture, with inter-satellite communication, is feasible. An inertial nav accuracy of 3 m (3D) is achieved which is mostly caused by GPS ephemeris errors A superior relative nav accuracy of 1.5 mm and 5 μm/s is achieved for 1-10 km baseline in a simulated environment. Iono delay is eliminated with GRAPHIC and by accounting for GPS satellites elevation angles A rigorous relative motion model, double-difference integer ambiguity resolution Dual-frequency receiver would contribute to faster convergence of Kalman filter and integer ambiguity resolution Iono scintillation, total electron count gradients, multipath, spacecraft maneuvers or thruster firings for formation control are not considered.
27 Montenbruck, O., and Ramos-Bosch, P., Precision real-time navigation of LEO satellites using GPS measurements, GPS Solutions, vol. 12, 2008, pp Contemporary remote science such as altimetry, gravimetry, SAR interferometry, or atmospheric sounding requires sub-decimeter position accuracy and sub mm/s velocity knowledge of LEO satellites. To reduce the burden of ground-based navigation, autonomous navigation of LEO satellites is highly desired. Thus we require highly precise autonomous navigation of the LEO satellites. This can be achieved with dynamic orbit determination techniques using GPS signals and their onboard real-time processing to eliminate various sources of errors. Montenbruck and Ramos-Bosch, in the cited paper, provide a reference algorithm for real-time onboard orbit determination, tested with GPS measurements from various recent space missions. GPS broadcast ephemeris contribute significant nav errors (3 m, 3D rms). With real-time GPS ephemeris products such as TDRSS Augmentation Service for Satellites (TASS), the nav errors of LEO satellites are reduced to m realtime.

28 28

29 29
30 Montenbruck, O., and Ramos-Bosch, P., Precision real-time navigation of LEO satellites using GPS measurements, GPS Solutions, vol. 12, 2008, pp CHAMP: Challenging Minisatellite Payload GRACE: Gravity Recovery and Climate Experiment TerraSAR-X: Radar Satellite High Resolution Imagery ICEsat: Ice, Cloud, and land Elevation satellite SAC-C: NASA and Argentine mission MetOp: Meteorological Operations
31 Montenbruck, O., and Ramos-Bosch, P., Precision real-time navigation of LEO satellites using GPS measurements, GPS Solutions, vol. 12, 2008, pp
32 Montenbruck, O., and Ramos-Bosch, P., Precision real-time navigation of LEO satellites using GPS measurements, GPS Solutions, vol. 12, 2008, pp CODE: Center for Orbit Determination in Europe


33 D Amico, S., Ardaens, J.-S., and Montenbruck, O., Navigation of Formation Flying Spacecraft using GPS: The PRISMA Technology Demonstration, ION 22 nd International Meeting of the Satellite Division, Savannah, GA, September 22-25, PRISMA: Prototype Research Instruments and Space Mission technology Advancement

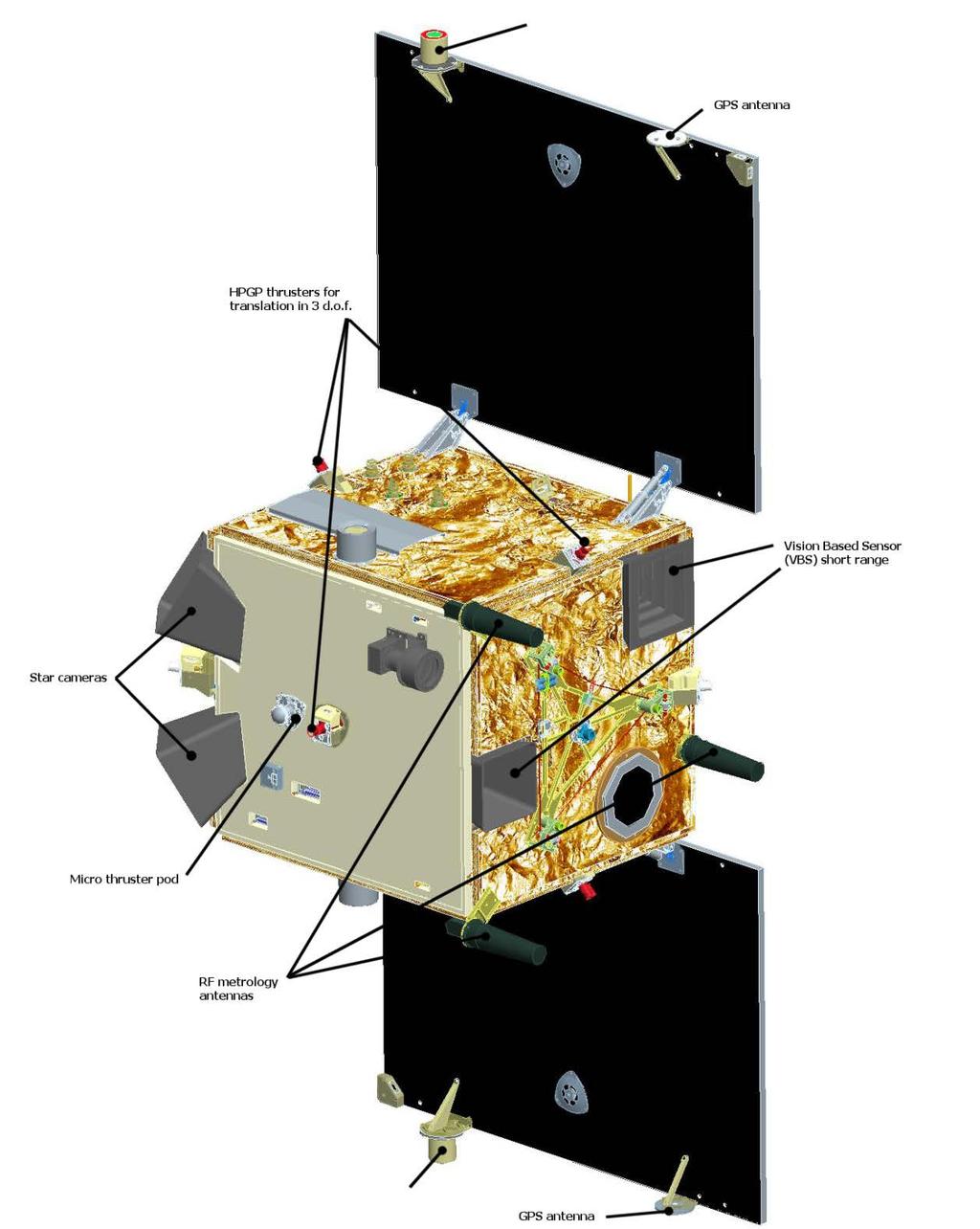
34 Courtesy: Mango (Main) and Tango (Target) 34
35 D Amico, S., et al., op. cit. [PRISMA] 35
36 D Amico, S., et al., op. cit. [PRISMA] 36
37 D Amico, S., et al., op. cit. 37
38 Conclusions [PRISMA] 38 A GPS-based navigation system for a two-satellite formation system is designed, implemented, and tested. Absolute real-time onboard positioning accuracy is ~3 m (3D, rms), mostly caused by GPS broadcast ephemeris errors and thruster activities This error can be mitigated with real-time GPS ephemeris Relative navigation accuracy depends critically on the attitude profile during specific mission phase, and may range from: 0.5 m if the GPS antennas of Main and Target point in different directions, Few cm if sufficient number of common GPS satellites is tracked by the two spacecraft Nav accuracy is limited by the restricted knowledge of Target attitude, and lack of knowledge of GPS antenna phase pattern variation in the s/c environment. For mm level accuracy, accurate attitude knowledge must be available on both s/c so as to enable real-time integer ambiguity resolution


39 Montenbruck, O., Wermuth, M., and Kahle, R., GPS Based Relative Navigation for the TanDEM-X Mission First Flight Results, Navigation: Journal of the ION, Vol. 58, No. 4, 2011, pp [with permission] 39 TanDEM-X: TerraSAR-X Add On Digital Elevation Mapping Synthetic aperture radar (SAR) mission, in close Formation flying with TerraSAR-X for bistatic SAR interferometry IGOR (Integrated GPS and Occultation Receiver)
40 Montenbruck, O., et al., op cit [with permission] 40 The objective of TanDEM-X is to produce a global map of high resolution digital elevation map with SAR interferometry. This requires baseline of a few hundred meters between the two spacecraft determined with mm accuracy. Both spacecraft are equipped with geodetic grade receivers. Polar dawn-dusk sun-synchronous orbit at a 515 km altitude, and an 11 day repeat period. The two spacecraft are in helix orbit which combines radial separation at the poles, with a lateral separation at the equator an e-i (eccentricityinclination) vector separation. This enables safe proximity operations in LEO. Mosaic GNSS receiver: single-frequency, for on-board navigation and timesynchronization Dual-frequency IGOR (Integrated GPS and Occultation Receiver) for offline orbit determination and reconstruction of the intersatellite separation
41 Moreira, A., Kreiger, G., Mittermayer, J, Satellite Configuration for Interferometric and/or Tomographic Remote Sensing by Means of Synthetic Aperture Radar, U.S. Patent No. 6,677,884 B2, Jan 13, Fig. 7 Orbits of two satellites having cross-track separation at equator and radial separation at the poles, and their planar projections to show the safe separation
42 Relative inclination and eccentricity vectors for LEO satellites 42 Montenbruck, et al, E/I-vector separation for safe switching of the GRACE formation, Aerospace Science and Technology, Vol. 10, 2006, pp D Amico, S., and Montenbruck, O., Proximity Operations of Formation-Flying Spacecraft Using an Eccentricity/Inclination Vector Separation, AIAA JGCD, Vol. 29, No. 3, pp
43 Perturbed and Controlled Motion of Relative Inclination and Eccentricity Vectors [D Amico, S., and Montenbruck, O., op. cit.] 43
44 Formation control of TanDEM-X (TDX) around TerraSAR-X (TSX): radial vs. cross-track motion [D Amico, S., and Montenbruck, O., op. cit.] 44
45 Formation control of TanDEM-X (TDX) around TerraSAR-X (TSX): radial vs. along-track motion [D Amico, S., and Montenbruck, O., op. cit.] 45
46 Formation control of TanDEM-X (TDX) around TerraSAR-X (TSX): tangential maneuvers [D Amico, S., and Montenbruck, O., op. cit.] 46
47 Conclusions [D Amico, S., and Montenbruck, O., op. cit.] 47 Orbital element differences simplify the formation flying relative dynamics and the design of autonomous control of perturbations caused by J 2. Relative eccentricity and inclination vectors their magnitudes and phases are related directly with the relative motion between the two satellites. This helps in designing safe, passive, J 2 -stable formation flying configurations (that is, the two orbits and the minute differences between their orbital elements). No-collision can be achieved, with desired navigation accuracies, by arranging and maintaining anti-parallel relative e/i vectors. This formation configuration design and control approach is suitable for SARinterferometry with a baseline of 1 km, or for longitude swap operation (GRACE satellites, for instance) with in-track separation of 200 km.
48 Montenbruck, O., D Amico, S., Ardaens, J.-S., and Wermuth, M., Carrier Phase Differential GPS for LEO Formation Flying The PRISMA and TanDEM-X Experience, AAS Astrodynamics Specialist Conference, July-August, 2010, Girdwood, U.S.A. 48 Both PRISMA and TanDEM-X use GPS as their primary means for absolute and relative navigation, but they use widely different GPS receivers, as the two missions are very different. PRISMA Low-cost single-frequency receiver Real-time navigation to provide instantaneous estimate of the relative state Real-time nav is compared with on-ground nav using CDGPS (single-difference carrier phase GPS) TanDEM-X No real-time solution required but a posteriori solution of rel nav of TDX-TSX SAR antenna required with ~1 mm (1D rms) accuracy (!) Geodetic-grade dual-frequency IGOR (integrated GPS occultation receiver, along with satellite laser ranging (SLR) reflectors The receiver is capable of L1 C/A code tracking, L1/L2 P(Y) tracking of up to 16 GPS satellites 12 channel of zenith looking choke ring antenna for precise orbit determination and relative navigation, 4 channels horizontal looking (parallel to velocity and antivelocity) for iono sounding
49 Offline (on-ground) Relative Navigation [Montenbruck, O., et al, AAS 2010, op cit] 49 Precise orbit determination with GPS High Precision Orbit Determination Software Tools (GHOST) PRISMA Single-frequency pseudorange and carrier phase measurements in a batch least-square estimation Determines epoch-wise clock offsets, the initial state vector, drag and radiation pressure coefficients, piece-wise constant empirical acceleration, and pass-by-pass ambiguities Precise GPS orbits and high rate (30 s) clock updates provided by CODE (Center for Orbit Determination in Europe) of the International GNSS Service (IGS) Iono errors eliminate with GRAPHIC (Group and Phase Ionospheric Correction) using L1 psudorange and carrier phase measurements Absolute position of Mango and Tango can be determined with 0.5 m accuracy in the absence of frequent orbit or attitude maneuvers TanDEM-X Dual-frequency carrier phase measurements enable ten times better orbit determination accuracy, ~ 5 cm; SLR predictions match
50 Offline (on-ground) Relative Navigation: Measurement models [Montenbruck, O., et al, AAS 2010, op cit] 50 To obtain relative nav accuracy of mm level, measurement models must also be of compatible accuracy. So GPS measurements on both spacecraft must be synchronized. For TanDEM-X, 1 μs mismatch causes 7.5 mm along-track position difference, so extrapolation required. Spacecraft attitude: GPS antennas are offset from the center-of-mass of the s/c Instantaneous attitude must be known with an accuracy of 0.5 mrad so proper sensors required Solar panel flexure Phase center offset and variation Center-of-mass location Phase wind up
51 Offline (on-ground) Relative Navigation Kalman Filter [Montenbruck, O., et al, AAS 2010, op cit] 51 For enhanced performance, the filter is operated in both forward and backward direction, so it is a filter/smoother For dual-frequency receiver (TanDEM-X), the filter estimates ΔI as well singledifference integer ambiguities ΔA 1 and ΔA 2, so for a 12 channel receiver the state vector is of the size 48x1 For single-frequency 12 channel receiver, the state vector shown below is 25x1 Integer ambiguities resolved by LAMBDA For dual-frequency receiver (TanDEM-X): For single-frequency:
52 Real-time Relative Navigation of PRISMA [Montenbruck, O., et al, AAS 2010, op cit] 52 Requirement: Provide absolute and relative navigation in all mission phases; the satellites don t necessarily maintain zenith orientation, and perform thruster firings for rendezvous and formation control Provide navigation even if only pseudorange and carrier phase measurements are from non-common GPS satellites (which means we can t difference the measurements from the two receivers) Fully symmetric treatment of both satellites; inertial (or ECEF) position and velocity of both satellites are estimated in a joint EKF. See the state vector below of the size ( )x1 for a 12-channel receiver; ΔV M is a delta velocity increment for the main satellite GRAPHIC is used with GPS satellites in view separately for Mango and Tango; this yields absolute nav accuracy of ~1 m for both satellites and ~ 0.5 m for relative nav After the use of GRAPHIC, single-difference carrier phase measurements for common GPS satellites in view are used Then, relative state, which would be accurate better than decimeter, would be obtained Onboard software does not insist on ambiguity fixing; float ambiguities are accepted to reduce load on flight computer High-fidelity acceleration model: 20x20 gravity, luni-solar gravity, atmospheric drag New measurements are process once every 30 s to manage the flight computer load, and trajectories are interpolated for 1 Hz navigation
53 [Montenbruck, O., et al, AAS 2010, op cit] 53
54 Summary and Conclusion [Montenbruck, O., et al, AAS 2010, op cit] 54 With single-difference carrier phase measurements, relative positions of two spacecraft can be reconstructed with the accuracy of a few mm to cm level. Achievable real-time accuracies are limited by phase center variation, and phase pattern distortion that may introduce unknown biases far greater than 1 mm carrier phase measurement noise level. Dual-frequency measurements are desirable for very precise navigation. For real-time applications, rel nav accuracy of PRISMA using single-difference carrier phase is sub-decimeter; but this is because of accepting float ambiguities to reduce load on onboard computer. In future formation flying missions, with moderate thruster activity, favorable spacecraft attitude, and a properly designed antenna system, 1 cm relative nav is possible.

55 55 Courtesy:

56 56
57 Concluding Remarks 57 The use of pseudorange and differential carrier phase GPS signals for real-time precise absolute navigation and precise relative navigation for formation control of LEO satellites has already been demonstrated. The on-orbit precision depends on the receivers and the way the signals are used, and the on-board computer resources. Further, it also depends on if real-time GPS satellites positions are made available with TDRSS Augmentation or International GNSS Service. Not sure if GAGAN would provide this service for India. This high nav accuracy has been achieved with both single-frequency and dualfrequency receivers, with accuracies of different levels. While EKF is used for on-orbit real-time navigation, batch least-square-error technique is used for on-ground post-facto navigation analysis for some remote sensing applications. Research on the use of IRNSS for precise absolute navigation (~0.2 m) and precise relative navigation (~1 mm) for formation control of SAR interferometry remote sensing LEO satellites will be very fruitful.
Real-Time Onboard Navigation of LEO Satellites using GPS
 Real-Time Onboard Navigation of LEO Satellites using GPS O. Montenbruck, DLR/GSOC Slide 1 Real-Time Onboard Navigation of LEO Satellites using GPS Navigating in Space Mission needs...... and how to meet
Real-Time Onboard Navigation of LEO Satellites using GPS O. Montenbruck, DLR/GSOC Slide 1 Real-Time Onboard Navigation of LEO Satellites using GPS Navigating in Space Mission needs...... and how to meet
Formation Flying Slide 2 ION Alberta Chapter > Calgary > 20 Dec 2012
 Formation Flying Slide 2 ION Alberta Chapter > Calgary > 20 Dec 2012 PRISMA (SSC) (SSC) Swedish technology demonstration mission Two micro-satellites (MANGO, TANGO) Qualification of sensors (GPS, FFRF,
Formation Flying Slide 2 ION Alberta Chapter > Calgary > 20 Dec 2012 PRISMA (SSC) (SSC) Swedish technology demonstration mission Two micro-satellites (MANGO, TANGO) Qualification of sensors (GPS, FFRF,
Modelling GPS Observables for Time Transfer
 Modelling GPS Observables for Time Transfer Marek Ziebart Department of Geomatic Engineering University College London Presentation structure Overview of GPS Time frames in GPS Introduction to GPS observables
Modelling GPS Observables for Time Transfer Marek Ziebart Department of Geomatic Engineering University College London Presentation structure Overview of GPS Time frames in GPS Introduction to GPS observables
Guochang Xu GPS. Theory, Algorithms and Applications. Second Edition. With 59 Figures. Sprin ger
 Guochang Xu GPS Theory, Algorithms and Applications Second Edition With 59 Figures Sprin ger Contents 1 Introduction 1 1.1 AKeyNoteofGPS 2 1.2 A Brief Message About GLONASS 3 1.3 Basic Information of Galileo
Guochang Xu GPS Theory, Algorithms and Applications Second Edition With 59 Figures Sprin ger Contents 1 Introduction 1 1.1 AKeyNoteofGPS 2 1.2 A Brief Message About GLONASS 3 1.3 Basic Information of Galileo
FINAL COMMISSIONING OF THE PRISMA GPS NAVIGATION SYSTEM
 FINAL COMMISSIONING OF THE PRISMA GPS NAVIGATION SYSTEM J.-S. Ardaens (1), S. D'Amico (2), O. Montenbruck (3) (1) German Space Operations Center (DLR/GSOC), 82234 Wessling, Germany, +498153282141, jean-sebastien.ardaens@dlr.de
FINAL COMMISSIONING OF THE PRISMA GPS NAVIGATION SYSTEM J.-S. Ardaens (1), S. D'Amico (2), O. Montenbruck (3) (1) German Space Operations Center (DLR/GSOC), 82234 Wessling, Germany, +498153282141, jean-sebastien.ardaens@dlr.de
Global Positioning System: what it is and how we use it for measuring the earth s movement. May 5, 2009
 Global Positioning System: what it is and how we use it for measuring the earth s movement. May 5, 2009 References Lectures from K. Larson s Introduction to GNSS http://www.colorado.edu/engineering/asen/
Global Positioning System: what it is and how we use it for measuring the earth s movement. May 5, 2009 References Lectures from K. Larson s Introduction to GNSS http://www.colorado.edu/engineering/asen/
KOMPSAT-2 Orbit Determination using GPS SIgnals
 Presented at GNSS 2004 The 2004 International Symposium on GNSS/GPS Sydney, Australia 6 8 December 2004 KOMPSAT-2 Orbit Determination using GPS SIgnals Dae-Won Chung KOMPSAT Systems Engineering and Integration
Presented at GNSS 2004 The 2004 International Symposium on GNSS/GPS Sydney, Australia 6 8 December 2004 KOMPSAT-2 Orbit Determination using GPS SIgnals Dae-Won Chung KOMPSAT Systems Engineering and Integration
FieldGenius Technical Notes GPS Terminology
 FieldGenius Technical Notes GPS Terminology Almanac A set of Keplerian orbital parameters which allow the satellite positions to be predicted into the future. Ambiguity An integer value of the number of
FieldGenius Technical Notes GPS Terminology Almanac A set of Keplerian orbital parameters which allow the satellite positions to be predicted into the future. Ambiguity An integer value of the number of
Principles of the Global Positioning System Lecture 19
 12.540 Principles of the Global Positioning System Lecture 19 Prof. Thomas Herring http://geoweb.mit.edu/~tah/12.540 GPS Models and processing Summary: Finish up modeling aspects Rank deficiencies Processing
12.540 Principles of the Global Positioning System Lecture 19 Prof. Thomas Herring http://geoweb.mit.edu/~tah/12.540 GPS Models and processing Summary: Finish up modeling aspects Rank deficiencies Processing
ISTS 2006-d-58 PRECISE ORBIT DETERMINATION FOR THE TERRASAR-X MISSION
 ISTS 2006-d-58 PRECISE ORBIT DETERMINATION FOR THE TERRASAR-X MISSION O. Montenbruck, Y. Yoon, E. Gill, M.Garcia-Fernandez Deutsches Zentrum für Luft- und Raumfahrt (DLR), German Space Operations Center
ISTS 2006-d-58 PRECISE ORBIT DETERMINATION FOR THE TERRASAR-X MISSION O. Montenbruck, Y. Yoon, E. Gill, M.Garcia-Fernandez Deutsches Zentrum für Luft- und Raumfahrt (DLR), German Space Operations Center
Integer Ambiguity Resolution for Precise Point Positioning Patrick Henkel
 Integer Ambiguity Resolution for Precise Point Positioning Patrick Henkel Overview Introduction Sequential Best-Integer Equivariant Estimation Multi-frequency code carrier linear combinations Galileo:
Integer Ambiguity Resolution for Precise Point Positioning Patrick Henkel Overview Introduction Sequential Best-Integer Equivariant Estimation Multi-frequency code carrier linear combinations Galileo:
Orion-S GPS Receiver Software Validation
 Space Flight Technology, German Space Operations Center (GSOC) Deutsches Zentrum für Luft- und Raumfahrt (DLR) e.v. O. Montenbruck Doc. No. : GTN-TST-11 Version : 1.1 Date : July 9, 23 Document Title:
Space Flight Technology, German Space Operations Center (GSOC) Deutsches Zentrum für Luft- und Raumfahrt (DLR) e.v. O. Montenbruck Doc. No. : GTN-TST-11 Version : 1.1 Date : July 9, 23 Document Title:
Satellite Navigation Integrity and integer ambiguity resolution
 Satellite Navigation Integrity and integer ambiguity resolution Picture: ESA AE4E08 Sandra Verhagen Course 2010 2011, lecture 12 1 Today s topics Integrity and RAIM Integer Ambiguity Resolution Study Section
Satellite Navigation Integrity and integer ambiguity resolution Picture: ESA AE4E08 Sandra Verhagen Course 2010 2011, lecture 12 1 Today s topics Integrity and RAIM Integer Ambiguity Resolution Study Section
Trimble Business Center:
 Trimble Business Center: Modernized Approaches for GNSS Baseline Processing Trimble s industry-leading software includes a new dedicated processor for static baselines. The software features dynamic selection
Trimble Business Center: Modernized Approaches for GNSS Baseline Processing Trimble s industry-leading software includes a new dedicated processor for static baselines. The software features dynamic selection
GNSS OBSERVABLES. João F. Galera Monico - UNESP Tuesday 12 Sep
 GNSS OBSERVABLES João F. Galera Monico - UNESP Tuesday Sep Basic references Basic GNSS Observation Equations Pseudorange Carrier Phase Doppler SNR Signal to Noise Ratio Pseudorange Observation Equation
GNSS OBSERVABLES João F. Galera Monico - UNESP Tuesday Sep Basic references Basic GNSS Observation Equations Pseudorange Carrier Phase Doppler SNR Signal to Noise Ratio Pseudorange Observation Equation
Spaceborne GNSS at DLR/GSOC
 Spaceborne GNSS at DLR/GSOC O.Montenbruck German Space Operations Center, DLR Slide 1 Organization DLR (German Aerospace Center) Aeronautics, astronautics, energy, and transport research National Space
Spaceborne GNSS at DLR/GSOC O.Montenbruck German Space Operations Center, DLR Slide 1 Organization DLR (German Aerospace Center) Aeronautics, astronautics, energy, and transport research National Space
NASDA S PRECISE ORBIT DETERMINATION SYSTEM
 NASDA S PRECISE ORBIT DETERMINATION SYSTEM Maki Maeda Takashi Uchimura, Akinobu Suzuki, Mikio Sawabe National Space Development Agency of Japan (NASDA) Sengen 2-1-1, Tsukuba, Ibaraki, 305-8505, JAPAN E-mail:
NASDA S PRECISE ORBIT DETERMINATION SYSTEM Maki Maeda Takashi Uchimura, Akinobu Suzuki, Mikio Sawabe National Space Development Agency of Japan (NASDA) Sengen 2-1-1, Tsukuba, Ibaraki, 305-8505, JAPAN E-mail:
Multisystem Real Time Precise-Point-Positioning, today with GPS+GLONASS in the near future also with QZSS, Galileo, Compass, IRNSS
 2 International Symposium on /GNSS October 26-28, 2. Multisystem Real Time Precise-Point-Positioning, today with +GLONASS in the near future also with QZSS, Galileo, Compass, IRNSS Álvaro Mozo García,
2 International Symposium on /GNSS October 26-28, 2. Multisystem Real Time Precise-Point-Positioning, today with +GLONASS in the near future also with QZSS, Galileo, Compass, IRNSS Álvaro Mozo García,
Table of Contents. Frequently Used Abbreviation... xvii
 GPS Satellite Surveying, 2 nd Edition Alfred Leick Department of Surveying Engineering, University of Maine John Wiley & Sons, Inc. 1995 (Navtech order #1028) Table of Contents Preface... xiii Frequently
GPS Satellite Surveying, 2 nd Edition Alfred Leick Department of Surveying Engineering, University of Maine John Wiley & Sons, Inc. 1995 (Navtech order #1028) Table of Contents Preface... xiii Frequently
Space Situational Awareness 2015: GPS Applications in Space
 Space Situational Awareness 2015: GPS Applications in Space James J. Miller, Deputy Director Policy & Strategic Communications Division May 13, 2015 GPS Extends the Reach of NASA Networks to Enable New
Space Situational Awareness 2015: GPS Applications in Space James J. Miller, Deputy Director Policy & Strategic Communications Division May 13, 2015 GPS Extends the Reach of NASA Networks to Enable New
GPS-Based Real-Time Navigation for the PRISMA Formation Flying Mission
 GPS-Based Real-ime Navigation for the PRISA Formation Flying ission S. D Amico (1), E. Gill (1),. Garcia (1), O. ontenbruck (1) (1) Deutsches Zentrum für Luft- und Raumfahrt (DLR), German Space Operations
GPS-Based Real-ime Navigation for the PRISA Formation Flying ission S. D Amico (1), E. Gill (1),. Garcia (1), O. ontenbruck (1) (1) Deutsches Zentrum für Luft- und Raumfahrt (DLR), German Space Operations
Global Correction Services for GNSS
 Global Correction Services for GNSS Hemisphere GNSS Whitepaper September 5, 2015 Overview Since the early days of GPS, new industries emerged while existing industries evolved to use position data in real-time.
Global Correction Services for GNSS Hemisphere GNSS Whitepaper September 5, 2015 Overview Since the early days of GPS, new industries emerged while existing industries evolved to use position data in real-time.
Understanding GPS/GNSS
 Understanding GPS/GNSS Principles and Applications Third Edition Contents Preface to the Third Edition Third Edition Acknowledgments xix xxi CHAPTER 1 Introduction 1 1.1 Introduction 1 1.2 GNSS Overview
Understanding GPS/GNSS Principles and Applications Third Edition Contents Preface to the Third Edition Third Edition Acknowledgments xix xxi CHAPTER 1 Introduction 1 1.1 Introduction 1 1.2 GNSS Overview
Precise Positioning with NovAtel CORRECT Including Performance Analysis
 Precise Positioning with NovAtel CORRECT Including Performance Analysis NovAtel White Paper April 2015 Overview This article provides an overview of the challenges and techniques of precise GNSS positioning.
Precise Positioning with NovAtel CORRECT Including Performance Analysis NovAtel White Paper April 2015 Overview This article provides an overview of the challenges and techniques of precise GNSS positioning.
GPS and Recent Alternatives for Localisation. Dr. Thierry Peynot Australian Centre for Field Robotics The University of Sydney
 GPS and Recent Alternatives for Localisation Dr. Thierry Peynot Australian Centre for Field Robotics The University of Sydney Global Positioning System (GPS) All-weather and continuous signal system designed
GPS and Recent Alternatives for Localisation Dr. Thierry Peynot Australian Centre for Field Robotics The University of Sydney Global Positioning System (GPS) All-weather and continuous signal system designed
GPS Field Experiment for Balloon-based Operation Vehicle
 GPS Field Experiment for Balloon-based Operation Vehicle P.J. Buist, S. Verhagen, Delft University of Technology T. Hashimoto, S. Sakai, N. Bando, JAXA p.j.buist@tudelft.nl 1 Objective of Paper This paper
GPS Field Experiment for Balloon-based Operation Vehicle P.J. Buist, S. Verhagen, Delft University of Technology T. Hashimoto, S. Sakai, N. Bando, JAXA p.j.buist@tudelft.nl 1 Objective of Paper This paper
GNSS Technologies. PPP and RTK
 PPP and RTK 29.02.2016 Content Carrier phase based positioning PPP RTK VRS Slides based on: GNSS Applications and Methods, by S. Gleason and D. Gebre-Egziabher (Eds.), Artech House Inc., 2009 http://www.gnssapplications.org/
PPP and RTK 29.02.2016 Content Carrier phase based positioning PPP RTK VRS Slides based on: GNSS Applications and Methods, by S. Gleason and D. Gebre-Egziabher (Eds.), Artech House Inc., 2009 http://www.gnssapplications.org/
Fundamentals of GPS Navigation
 Fundamentals of GPS Navigation Kiril Alexiev 1 /76 2 /76 At the traditional January media briefing in Paris (January 18, 2017), European Space Agency (ESA) General Director Jan Woerner explained the knowns
Fundamentals of GPS Navigation Kiril Alexiev 1 /76 2 /76 At the traditional January media briefing in Paris (January 18, 2017), European Space Agency (ESA) General Director Jan Woerner explained the knowns
Effect of Quasi Zenith Satellite (QZS) on GPS Positioning
 on GPS Positioning") Effect of Quasi Zenith Satellite (QZS) on GPS ing Tomoji Takasu 1, Takuji Ebinuma 2, and Akio Yasuda 3 Laboratory of Satellite Navigation, Tokyo University of Marine Science and Technology 1 (Tel: +81-5245-7365,
Effect of Quasi Zenith Satellite (QZS) on GPS ing Tomoji Takasu 1, Takuji Ebinuma 2, and Akio Yasuda 3 Laboratory of Satellite Navigation, Tokyo University of Marine Science and Technology 1 (Tel: +81-5245-7365,
Quality of GRACE Orbits Using the Reprocessed IGS Products
 Quality of GRACE Orbits Using the Reprocessed IGS Products Z. Kang, B. Tapley, S. Bettadpur, H. Save Center for Space Research 3925 W Braker Lane Suite 200, Austin TX 78759 USA 2009 AGU Fall Meeting GRACE
Quality of GRACE Orbits Using the Reprocessed IGS Products Z. Kang, B. Tapley, S. Bettadpur, H. Save Center for Space Research 3925 W Braker Lane Suite 200, Austin TX 78759 USA 2009 AGU Fall Meeting GRACE
Simulation of GPS-based Launch Vehicle Trajectory Estimation using UNSW Kea GPS Receiver
 Simulation of GPS-based Launch Vehicle Trajectory Estimation using UNSW Kea GPS Receiver Sanat Biswas Australian Centre for Space Engineering Research, UNSW Australia, s.biswas@unsw.edu.au Li Qiao School
Simulation of GPS-based Launch Vehicle Trajectory Estimation using UNSW Kea GPS Receiver Sanat Biswas Australian Centre for Space Engineering Research, UNSW Australia, s.biswas@unsw.edu.au Li Qiao School
Phase Center Calibration and Multipath Test Results of a Digital Beam-Steered Antenna Array
 Phase Center Calibration and Multipath Test Results of a Digital Beam-Steered Antenna Array Kees Stolk and Alison Brown, NAVSYS Corporation BIOGRAPHY Kees Stolk is an engineer at NAVSYS Corporation working
Phase Center Calibration and Multipath Test Results of a Digital Beam-Steered Antenna Array Kees Stolk and Alison Brown, NAVSYS Corporation BIOGRAPHY Kees Stolk is an engineer at NAVSYS Corporation working
3. Radio Occultation Principles
 Page 1 of 6 [Up] [Previous] [Next] [Home] 3. Radio Occultation Principles The radio occultation technique was first developed at the Stanford University Center for Radar Astronomy (SUCRA) for studies of
Page 1 of 6 [Up] [Previous] [Next] [Home] 3. Radio Occultation Principles The radio occultation technique was first developed at the Stanford University Center for Radar Astronomy (SUCRA) for studies of
Broadcast Ionospheric Model Accuracy and the Effect of Neglecting Ionospheric Effects on C/A Code Measurements on a 500 km Baseline
 Broadcast Ionospheric Model Accuracy and the Effect of Neglecting Ionospheric Effects on C/A Code Measurements on a 500 km Baseline Intro By David MacDonald Waypoint Consulting May 2002 The ionosphere
Broadcast Ionospheric Model Accuracy and the Effect of Neglecting Ionospheric Effects on C/A Code Measurements on a 500 km Baseline Intro By David MacDonald Waypoint Consulting May 2002 The ionosphere
t =1 Transmitter #2 Figure 1-1 One Way Ranging Schematic
 1.0 Introduction OpenSource GPS is open source software that runs a GPS receiver based on the Zarlink GP2015 / GP2021 front end and digital processing chipset. It is a fully functional GPS receiver which
1.0 Introduction OpenSource GPS is open source software that runs a GPS receiver based on the Zarlink GP2015 / GP2021 front end and digital processing chipset. It is a fully functional GPS receiver which
Introduction to DGNSS
 Introduction to DGNSS Jaume Sanz Subirana J. Miguel Juan Zornoza Research group of Astronomy & Geomatics (gage) Technical University of Catalunya (UPC), Spain. Web site: http://www.gage.upc.edu Hanoi,
Introduction to DGNSS Jaume Sanz Subirana J. Miguel Juan Zornoza Research group of Astronomy & Geomatics (gage) Technical University of Catalunya (UPC), Spain. Web site: http://www.gage.upc.edu Hanoi,
Precision real-time navigation of LEO satellites using global positioning system measurements
 GPS Solut (2008) 12:187 198 DOI 10.1007/s10291-007-0080-x ORIGINAL ARTICLE Precision real-time navigation of LEO satellites using global positioning system measurements Oliver Montenbruck Æ Pere Ramos-Bosch
GPS Solut (2008) 12:187 198 DOI 10.1007/s10291-007-0080-x ORIGINAL ARTICLE Precision real-time navigation of LEO satellites using global positioning system measurements Oliver Montenbruck Æ Pere Ramos-Bosch
On the GNSS integer ambiguity success rate
 On the GNSS integer ambiguity success rate P.J.G. Teunissen Mathematical Geodesy and Positioning Faculty of Civil Engineering and Geosciences Introduction Global Navigation Satellite System (GNSS) ambiguity
On the GNSS integer ambiguity success rate P.J.G. Teunissen Mathematical Geodesy and Positioning Faculty of Civil Engineering and Geosciences Introduction Global Navigation Satellite System (GNSS) ambiguity
Measurement Level Integration of Multiple Low-Cost GPS Receivers for UAVs
 Measurement Level Integration of Multiple Low-Cost GPS Receivers for UAVs Akshay Shetty and Grace Xingxin Gao University of Illinois at Urbana-Champaign BIOGRAPHY Akshay Shetty is a graduate student in
Measurement Level Integration of Multiple Low-Cost GPS Receivers for UAVs Akshay Shetty and Grace Xingxin Gao University of Illinois at Urbana-Champaign BIOGRAPHY Akshay Shetty is a graduate student in
Wednesday AM: (Doug) 2. PS and Long Period Signals
 2. PS and Long Period Signals") Wednesday AM: (Doug) 2 PS and Long Period Signals What is Colorado famous for? 32 satellites 12 Early on in the world of science synchronization of clocks was found to be important. consider Paris: puffs
Wednesday AM: (Doug) 2 PS and Long Period Signals What is Colorado famous for? 32 satellites 12 Early on in the world of science synchronization of clocks was found to be important. consider Paris: puffs
An Introduction to GPS
 An Introduction to GPS You are here The GPS system: what is GPS Principles of GPS: how does it work Processing of GPS: getting precise results Yellowstone deformation: an example What is GPS? System to
An Introduction to GPS You are here The GPS system: what is GPS Principles of GPS: how does it work Processing of GPS: getting precise results Yellowstone deformation: an example What is GPS? System to
Precise Point Positioning (PPP) using
 using") Precise Point Positioning (PPP) using Product Technical Notes // May 2009 OnPOZ is a product line of Effigis. EZSurv is a registered trademark of Effigis. All other trademarks are registered or recognized
Precise Point Positioning (PPP) using Product Technical Notes // May 2009 OnPOZ is a product line of Effigis. EZSurv is a registered trademark of Effigis. All other trademarks are registered or recognized
One Source for Positioning Success
 novatel.com One Source for Positioning Success RTK, PPP, SBAS OR DGNSS. NOVATEL CORRECT OPTIMIZES ALL CORRECTION SOURCES, PUTTING MORE POWER, FLEXIBILITY AND CONTROL IN YOUR HANDS. NovAtel CORRECT is the
novatel.com One Source for Positioning Success RTK, PPP, SBAS OR DGNSS. NOVATEL CORRECT OPTIMIZES ALL CORRECTION SOURCES, PUTTING MORE POWER, FLEXIBILITY AND CONTROL IN YOUR HANDS. NovAtel CORRECT is the
Fundamentals of GPS for high-precision geodesy
 Fundamentals of GPS for high-precision geodesy T. A. Herring M. A. Floyd R. W. King Massachusetts Institute of Technology, Cambridge, MA, USA UNAVCO Headquarters, Boulder, Colorado, USA 19 23 June 2017
Fundamentals of GPS for high-precision geodesy T. A. Herring M. A. Floyd R. W. King Massachusetts Institute of Technology, Cambridge, MA, USA UNAVCO Headquarters, Boulder, Colorado, USA 19 23 June 2017
Orbit Determination for CE5T Based upon GPS Data
 Orbit Determination for CE5T Based upon GPS Data Cao Jianfeng (1), Tang Geshi (2), Hu Songjie (3), ZhangYu (4), and Liu Lei (5) (1) Beijing Aerospace Control Center, 26 Beiqing Road, Haidian Disrtrict,
Orbit Determination for CE5T Based upon GPS Data Cao Jianfeng (1), Tang Geshi (2), Hu Songjie (3), ZhangYu (4), and Liu Lei (5) (1) Beijing Aerospace Control Center, 26 Beiqing Road, Haidian Disrtrict,
UCGE Reports Number 20054
 UCGE Reports Number 20054 Department of Geomatics Engineering An Analysis of Some Critical Error Sources in Static GPS Surveying (URL: http://www.geomatics.ucalgary.ca/links/gradtheses.html) by Weigen
UCGE Reports Number 20054 Department of Geomatics Engineering An Analysis of Some Critical Error Sources in Static GPS Surveying (URL: http://www.geomatics.ucalgary.ca/links/gradtheses.html) by Weigen
Integrity of Satellite Navigation in the Arctic
 Integrity of Satellite Navigation in the Arctic TODD WALTER & TYLER REID STANFORD UNIVERSITY APRIL 2018 Satellite Based Augmentation Systems (SBAS) in 2018 2 SBAS Networks in 2021? 3 What is Meant by Integrity?
Integrity of Satellite Navigation in the Arctic TODD WALTER & TYLER REID STANFORD UNIVERSITY APRIL 2018 Satellite Based Augmentation Systems (SBAS) in 2018 2 SBAS Networks in 2021? 3 What is Meant by Integrity?
MINIMIZING SELECTIVE AVAILABILITY ERROR ON TOPEX GPS MEASUREMENTS. S. C. Wu*, W. I. Bertiger and J. T. Wu
 MINIMIZING SELECTIVE AVAILABILITY ERROR ON TOPEX GPS MEASUREMENTS S. C. Wu*, W. I. Bertiger and J. T. Wu Jet Propulsion Laboratory California Institute of Technology Pasadena, California 9119 Abstract*
MINIMIZING SELECTIVE AVAILABILITY ERROR ON TOPEX GPS MEASUREMENTS S. C. Wu*, W. I. Bertiger and J. T. Wu Jet Propulsion Laboratory California Institute of Technology Pasadena, California 9119 Abstract*
GPS Position Estimation Using Integer Ambiguity Free Carrier Phase Measurements
 ISSN (Online) : 975-424 GPS Position Estimation Using Integer Ambiguity Free Carrier Phase Measurements G Sateesh Kumar #1, M N V S S Kumar #2, G Sasi Bhushana Rao *3 # Dept. of ECE, Aditya Institute of
ISSN (Online) : 975-424 GPS Position Estimation Using Integer Ambiguity Free Carrier Phase Measurements G Sateesh Kumar #1, M N V S S Kumar #2, G Sasi Bhushana Rao *3 # Dept. of ECE, Aditya Institute of
Predictions of the GOCE in-flight performances with the End-to-End System Simulator. Third International GOCE User Workshop
 Predictions of the GOCE in-flight performances with the End-to-End System Simulator Page 1 Giuseppe Catastini, Stefano Cesare, Simona De Sanctis, Massimo Dumontel, Manlio Parisch, Gianfranco Sechi Alcatel
Predictions of the GOCE in-flight performances with the End-to-End System Simulator Page 1 Giuseppe Catastini, Stefano Cesare, Simona De Sanctis, Massimo Dumontel, Manlio Parisch, Gianfranco Sechi Alcatel
Some of the proposed GALILEO and modernized GPS frequencies.
 On the selection of frequencies for long baseline GALILEO ambiguity resolution P.J.G. Teunissen, P. Joosten, C.D. de Jong Department of Mathematical Geodesy and Positioning, Delft University of Technology,
On the selection of frequencies for long baseline GALILEO ambiguity resolution P.J.G. Teunissen, P. Joosten, C.D. de Jong Department of Mathematical Geodesy and Positioning, Delft University of Technology,
Multi-Receiver Vector Tracking
 Multi-Receiver Vector Tracking Yuting Ng and Grace Xingxin Gao please feel free to view the.pptx version for the speaker notes Cutting-Edge Applications UAV formation flight remote sensing interference
Multi-Receiver Vector Tracking Yuting Ng and Grace Xingxin Gao please feel free to view the.pptx version for the speaker notes Cutting-Edge Applications UAV formation flight remote sensing interference
Worst-Case GPS Constellation for Testing Navigation at Geosynchronous Orbit for GOES-R
 Worst-Case GPS Constellation for Testing Navigation at Geosynchronous Orbit for GOES-R Kristin Larson, Dave Gaylor, and Stephen Winkler Emergent Space Technologies and Lockheed Martin Space Systems 36
Worst-Case GPS Constellation for Testing Navigation at Geosynchronous Orbit for GOES-R Kristin Larson, Dave Gaylor, and Stephen Winkler Emergent Space Technologies and Lockheed Martin Space Systems 36
82230 Weßling, Germany,
 A NAVIGATION PROCESSOR FOR FLEXIBLE REAL-TIME FORMATION FLYING APPLICATIONS Sunny LEUNG (1),(3), Eberhard GILL (1), Oliver MONTENBRUCK (1), Sergio MONTENEGRO (2) (1) German Space Operations Center, Deutsches
A NAVIGATION PROCESSOR FOR FLEXIBLE REAL-TIME FORMATION FLYING APPLICATIONS Sunny LEUNG (1),(3), Eberhard GILL (1), Oliver MONTENBRUCK (1), Sergio MONTENEGRO (2) (1) German Space Operations Center, Deutsches
Tajul Ariffin Musa. Tajul A. Musa. Dept. of Geomatics Eng, FKSG, Universiti Teknologi Malaysia, Skudai, Johor, MALAYSIA.
 Tajul Ariffin Musa Dept. of Geomatics Eng, FKSG, Universiti Teknologi Malaysia, 81310 Skudai, Johor, MALAYSIA. Phone : +6075530830;+6075530883; Mobile : +60177294601 Fax : +6075566163 E-mail : tajul@fksg.utm.my
Tajul Ariffin Musa Dept. of Geomatics Eng, FKSG, Universiti Teknologi Malaysia, 81310 Skudai, Johor, MALAYSIA. Phone : +6075530830;+6075530883; Mobile : +60177294601 Fax : +6075566163 E-mail : tajul@fksg.utm.my
Sounding the Atmosphere Ground Support for GNSS Radio-Occultation Processing
 Sounding the Atmosphere Ground Support for GNSS Radio-Occultation Processing Atmospheric Sounding René Zandbergen & John M. Dow Navigation Support Office, Ground Systems Engineering Department, Directorate
Sounding the Atmosphere Ground Support for GNSS Radio-Occultation Processing Atmospheric Sounding René Zandbergen & John M. Dow Navigation Support Office, Ground Systems Engineering Department, Directorate
Technology of Precise Orbit Determination
 Technology of Precise Orbit Determination V Seiji Katagiri V Yousuke Yamamoto (Manuscript received March 19, 2008) Since 1971, most domestic orbit determination systems have been developed by Fujitsu and
Technology of Precise Orbit Determination V Seiji Katagiri V Yousuke Yamamoto (Manuscript received March 19, 2008) Since 1971, most domestic orbit determination systems have been developed by Fujitsu and
ION GNSS 2011 FILLING IN THE GAPS OF RTK WITH REGIONAL PPP
 ION GNSS 2011 FILLING IN THE GAPS OF RTK WITH REGIONAL PPP SEPTEMBER 22 th, 2011 ION GNSS 2011. PORTLAND, OREGON, USA SESSION F3: PRECISE POSITIONING AND RTK FOR CIVIL APPLICATION C. García A. Mozo P.
ION GNSS 2011 FILLING IN THE GAPS OF RTK WITH REGIONAL PPP SEPTEMBER 22 th, 2011 ION GNSS 2011. PORTLAND, OREGON, USA SESSION F3: PRECISE POSITIONING AND RTK FOR CIVIL APPLICATION C. García A. Mozo P.
EXPERIMENTAL ONE AXIS ATTITUDE DETERMINATION USING GPS CARRIER PHASE MEASUREMENTS
 EXPERIMENTAL ONE AXIS ATTITUDE DETERMINATION USING GPS CARRIER PHASE MEASUREMENTS Arcélio Costa Louro INPE - National Institute for Space Research E-mail: aclouro@dss.inpe.br Roberto Vieira da Fonseca
EXPERIMENTAL ONE AXIS ATTITUDE DETERMINATION USING GPS CARRIER PHASE MEASUREMENTS Arcélio Costa Louro INPE - National Institute for Space Research E-mail: aclouro@dss.inpe.br Roberto Vieira da Fonseca
HIGH-PRECISION ONBOARD ORBIT DETERMINATION FOR SMALL SATELLITES THE GPS-BASED XNS ON X-SAT
 HIGH-PRECISION ONBOARD ORBIT DETERMINATION FOR SMALL SATELLITES THE GPS-BASED XNS ON X-SAT E. Gill (1), O. Montenbruck (1), K. Arichandran (2), S. H. Tan (2), T. Bretschneider (2) (1) Deutsches Zentrum
HIGH-PRECISION ONBOARD ORBIT DETERMINATION FOR SMALL SATELLITES THE GPS-BASED XNS ON X-SAT E. Gill (1), O. Montenbruck (1), K. Arichandran (2), S. H. Tan (2), T. Bretschneider (2) (1) Deutsches Zentrum
SPAN Technology System Characteristics and Performance
 SPAN Technology System Characteristics and Performance NovAtel Inc. ABSTRACT The addition of inertial technology to a GPS system provides multiple benefits, including the availability of attitude output
SPAN Technology System Characteristics and Performance NovAtel Inc. ABSTRACT The addition of inertial technology to a GPS system provides multiple benefits, including the availability of attitude output
CHAPTER 2 GPS GEODESY. Estelar. The science of geodesy is concerned with the earth by quantitatively
 CHAPTER 2 GPS GEODESY 2.1. INTRODUCTION The science of geodesy is concerned with the earth by quantitatively describing the coordinates of each point on the surface in a global or local coordinate system.
CHAPTER 2 GPS GEODESY 2.1. INTRODUCTION The science of geodesy is concerned with the earth by quantitatively describing the coordinates of each point on the surface in a global or local coordinate system.
A GLONASS Observation Message Compatible With The Compact Measurement Record Format
 A GLONASS Observation Message Compatible With The Compact Measurement Record Format Leica Geosystems AG 1 Introduction Real-time kinematic (RTK) Global Navigation Satellite System (GNSS) positioning has
A GLONASS Observation Message Compatible With The Compact Measurement Record Format Leica Geosystems AG 1 Introduction Real-time kinematic (RTK) Global Navigation Satellite System (GNSS) positioning has
Integration of GPS with a Rubidium Clock and a Barometer for Land Vehicle Navigation
 Integration of GPS with a Rubidium Clock and a Barometer for Land Vehicle Navigation Zhaonian Zhang, Department of Geomatics Engineering, The University of Calgary BIOGRAPHY Zhaonian Zhang is a MSc student
Integration of GPS with a Rubidium Clock and a Barometer for Land Vehicle Navigation Zhaonian Zhang, Department of Geomatics Engineering, The University of Calgary BIOGRAPHY Zhaonian Zhang is a MSc student
Assessing & Mitigation of risks on railways operational scenarios
 R H I N O S Railway High Integrity Navigation Overlay System Assessing & Mitigation of risks on railways operational scenarios Rome, June 22 nd 2017 Anja Grosch, Ilaria Martini, Omar Garcia Crespillo (DLR)
R H I N O S Railway High Integrity Navigation Overlay System Assessing & Mitigation of risks on railways operational scenarios Rome, June 22 nd 2017 Anja Grosch, Ilaria Martini, Omar Garcia Crespillo (DLR)
GPS the Interdisciplinary Chameleon: How Does it do That?
 GPS the Interdisciplinary Chameleon: How Does it do That? Geoff Blewitt Nevada Bureau of Mines and Geology & Seismological Laboratory University of Nevada, Reno, USA Cool Science using GPS Application
GPS the Interdisciplinary Chameleon: How Does it do That? Geoff Blewitt Nevada Bureau of Mines and Geology & Seismological Laboratory University of Nevada, Reno, USA Cool Science using GPS Application
GPS data correction using encoders and INS sensors
 GPS data correction using encoders and INS sensors Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, Avenue de la Renaissance 30, 1000 Brussels, Belgium sidahmed.berrabah@rma.ac.be
GPS data correction using encoders and INS sensors Sid Ahmed Berrabah Mechanical Department, Royal Military School, Belgium, Avenue de la Renaissance 30, 1000 Brussels, Belgium sidahmed.berrabah@rma.ac.be
IAG School on Reference Systems June 7 June 12, 2010 Aegean University, Department of Geography Mytilene, Lesvos Island, Greece SCHOOL PROGRAM
 IAG School on Reference Systems June 7 June 12, 2010 Aegean University, Department of Geography Mytilene, Lesvos Island, Greece SCHOOL PROGRAM Monday June 7 8:00-9:00 Registration 9:00-10:00 Opening Session
IAG School on Reference Systems June 7 June 12, 2010 Aegean University, Department of Geography Mytilene, Lesvos Island, Greece SCHOOL PROGRAM Monday June 7 8:00-9:00 Registration 9:00-10:00 Opening Session
Study and analysis of Differential GNSS and Precise Point Positioning
 IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 2320-3331, Volume 9, Issue 2 Ver. I (Mar Apr. 2014), PP 53-59 Study and analysis of Differential GNSS and Precise
IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 2320-3331, Volume 9, Issue 2 Ver. I (Mar Apr. 2014), PP 53-59 Study and analysis of Differential GNSS and Precise
THE NASA/JPL AIRBORNE SYNTHETIC APERTURE RADAR SYSTEM. Yunling Lou, Yunjin Kim, and Jakob van Zyl
 THE NASA/JPL AIRBORNE SYNTHETIC APERTURE RADAR SYSTEM Yunling Lou, Yunjin Kim, and Jakob van Zyl Jet Propulsion Laboratory California Institute of Technology 4800 Oak Grove Drive, MS 300-243 Pasadena,
THE NASA/JPL AIRBORNE SYNTHETIC APERTURE RADAR SYSTEM Yunling Lou, Yunjin Kim, and Jakob van Zyl Jet Propulsion Laboratory California Institute of Technology 4800 Oak Grove Drive, MS 300-243 Pasadena,
Relative Navigation, Timing & Data. Communications for CubeSat Clusters. Nestor Voronka, Tyrel Newton
 Relative Navigation, Timing & Data Communications for CubeSat Clusters Nestor Voronka, Tyrel Newton Tethers Unlimited, Inc. 11711 N. Creek Pkwy S., Suite D113 Bothell, WA 98011 425-486-0100x678 voronka@tethers.com
Relative Navigation, Timing & Data Communications for CubeSat Clusters Nestor Voronka, Tyrel Newton Tethers Unlimited, Inc. 11711 N. Creek Pkwy S., Suite D113 Bothell, WA 98011 425-486-0100x678 voronka@tethers.com
Development and Verification of the Stanford GNSS Navigation Testbed for Spacecraft Formation Flying
 Space Rendezvous Laboratory Department of Aeronautics and Astronautics Stanford University https://slab.stanford.edu/ Development and Verification of the Stanford GNSS Navigation Testbed for Spacecraft
Space Rendezvous Laboratory Department of Aeronautics and Astronautics Stanford University https://slab.stanford.edu/ Development and Verification of the Stanford GNSS Navigation Testbed for Spacecraft
GPS Based Attitude Determination for the Flying Laptop Satellite
 GPS Based Attitude Determination for the Flying Laptop Satellite André Hauschild 1,3, Georg Grillmayer 2, Oliver Montenbruck 1, Markus Markgraf 1, Peter Vörsmann 3 1 DLR/GSOC, Oberpfaffenhofen, Germany
GPS Based Attitude Determination for the Flying Laptop Satellite André Hauschild 1,3, Georg Grillmayer 2, Oliver Montenbruck 1, Markus Markgraf 1, Peter Vörsmann 3 1 DLR/GSOC, Oberpfaffenhofen, Germany
Precise positioning in Europe using the Galileo and GPS combination
 Environmental Engineering 10th International Conference eissn 2029-7092 / eisbn 978-609-476-044-0 Vilnius Gediminas Technical University Lithuania, 27 28 April 2017 Article ID: enviro.2017.210 http://enviro.vgtu.lt
Environmental Engineering 10th International Conference eissn 2029-7092 / eisbn 978-609-476-044-0 Vilnius Gediminas Technical University Lithuania, 27 28 April 2017 Article ID: enviro.2017.210 http://enviro.vgtu.lt
Estimation Method of Ionospheric TEC Distribution using Single Frequency Measurements of GPS Signals
 Estimation Method of Ionospheric TEC Distribution using Single Frequency Measurements of GPS Signals Win Zaw Hein #, Yoshitaka Goto #, Yoshiya Kasahara # # Division of Electrical Engineering and Computer
Estimation Method of Ionospheric TEC Distribution using Single Frequency Measurements of GPS Signals Win Zaw Hein #, Yoshitaka Goto #, Yoshiya Kasahara # # Division of Electrical Engineering and Computer
Ionospheric Corrections for GNSS
 Ionospheric Corrections for GNSS The Atmosphere and its Effect on GNSS Systems 14 to 16 April 2008 Santiago, Chile Ing. Roland Lejeune Overview Ionospheric delay corrections Core constellations GPS GALILEO
Ionospheric Corrections for GNSS The Atmosphere and its Effect on GNSS Systems 14 to 16 April 2008 Santiago, Chile Ing. Roland Lejeune Overview Ionospheric delay corrections Core constellations GPS GALILEO
Chapter 6 GPS Relative Positioning Determination Concepts
 Chapter 6 GPS Relative Positioning Determination Concepts 6-1. General Absolute positioning, as discussed earlier, will not provide the accuracies needed for most USACE control projects due to existing
Chapter 6 GPS Relative Positioning Determination Concepts 6-1. General Absolute positioning, as discussed earlier, will not provide the accuracies needed for most USACE control projects due to existing
Kalman Filter Based Integer Ambiguity. Ionosphere and Troposphere Estimation
 ION GNSS 2010 Kalman Filter Based Integer Ambiguity Resolution Strategy t for Long Baseline RTK with Ionosphere and Troposphere Estimation Tokyo University of Marine Science and Technology Tomoji jitakasu
ION GNSS 2010 Kalman Filter Based Integer Ambiguity Resolution Strategy t for Long Baseline RTK with Ionosphere and Troposphere Estimation Tokyo University of Marine Science and Technology Tomoji jitakasu
LOCAL IONOSPHERIC MODELLING OF GPS CODE AND CARRIER PHASE OBSERVATIONS
 Survey Review, 40, 309 pp.71-84 (July 008) LOCAL IONOSPHERIC MODELLING OF GPS CODE AND CARRIER PHASE OBSERVATIONS H. Nahavandchi and A. Soltanpour Norwegian University of Science and Technology, Division
Survey Review, 40, 309 pp.71-84 (July 008) LOCAL IONOSPHERIC MODELLING OF GPS CODE AND CARRIER PHASE OBSERVATIONS H. Nahavandchi and A. Soltanpour Norwegian University of Science and Technology, Division
Radar Probabilistic Data Association Filter with GPS Aiding for Target Selection and Relative Position Determination. Tyler P.
 Radar Probabilistic Data Association Filter with GPS Aiding for Target Selection and Relative Position Determination by Tyler P. Sherer A thesis submitted to the Graduate Faculty of Auburn University in
Radar Probabilistic Data Association Filter with GPS Aiding for Target Selection and Relative Position Determination by Tyler P. Sherer A thesis submitted to the Graduate Faculty of Auburn University in
The Indian Regional Navigation. First Position Fix with IRNSS. Successful Proof-of-Concept Demonstration
 Successful Proof-of-Concept Demonstration First Position Fix with IRNSS A. S. GANESHAN, S. C. RATNAKARA, NIRMALA SRINIVASAN, BABU RAJARAM, NEETHA TIRMAL, KARTIK ANBALAGAN INDIAN SPACE RESEARCH ORGANISATION
Successful Proof-of-Concept Demonstration First Position Fix with IRNSS A. S. GANESHAN, S. C. RATNAKARA, NIRMALA SRINIVASAN, BABU RAJARAM, NEETHA TIRMAL, KARTIK ANBALAGAN INDIAN SPACE RESEARCH ORGANISATION
Generation of Consistent GNSS SSR Corrections
 Generation of Consistent GNSS SSR Corrections for Distributed CORS Networks Jannes Wübbena, Martin Schmitz, Gerhard Wübbena Geo++ GmbH 30827 Garbsen, Germany www.geopp.de Abstract Generation of Consistent
Generation of Consistent GNSS SSR Corrections for Distributed CORS Networks Jannes Wübbena, Martin Schmitz, Gerhard Wübbena Geo++ GmbH 30827 Garbsen, Germany www.geopp.de Abstract Generation of Consistent
The added value of new GNSS to monitor the ionosphere
 The added value of new GNSS to monitor the ionosphere R. Warnant 1, C. Deprez 1, L. Van de Vyvere 2 1 University of Liege, Liege, Belgium. 2 M3 System, Wavre, Belgium. Monitoring TEC for geodetic applications
The added value of new GNSS to monitor the ionosphere R. Warnant 1, C. Deprez 1, L. Van de Vyvere 2 1 University of Liege, Liege, Belgium. 2 M3 System, Wavre, Belgium. Monitoring TEC for geodetic applications
The Design of the Formation Flying Navigation for Proba-3.
 The Design of the Formation Flying Navigation for Proba-3 João Branco (1), Diego Escorial (2), and Valentin Barrena (3) (1)(2)(3) GMV, C Isaac Newton 11, 28760 Tres Cantos Spain, +34918072100, jbranco@gmv.com
The Design of the Formation Flying Navigation for Proba-3 João Branco (1), Diego Escorial (2), and Valentin Barrena (3) (1)(2)(3) GMV, C Isaac Newton 11, 28760 Tres Cantos Spain, +34918072100, jbranco@gmv.com
The Global Positioning System
 The Global Positioning System 5-1 US GPS Facts of Note DoD navigation system First launch on 22 Feb 1978, fully operational in 1994 ~$15 billion (?) invested to date 24 (+/-) Earth-orbiting satellites
The Global Positioning System 5-1 US GPS Facts of Note DoD navigation system First launch on 22 Feb 1978, fully operational in 1994 ~$15 billion (?) invested to date 24 (+/-) Earth-orbiting satellites
GPS for crustal deformation studies. May 7, 2009
 GPS for crustal deformation studies May 7, 2009 High precision GPS for Geodesy Use precise orbit products (e.g., IGS or JPL) Use specialized modeling software GAMIT/GLOBK GIPSY OASIS BERNESE These software
GPS for crustal deformation studies May 7, 2009 High precision GPS for Geodesy Use precise orbit products (e.g., IGS or JPL) Use specialized modeling software GAMIT/GLOBK GIPSY OASIS BERNESE These software
Global Navigation Satellite Systems II
 Global Navigation Satellite Systems II AERO4701 Space Engineering 3 Week 4 Last Week Examined the problem of satellite coverage and constellation design Looked at the GPS satellite constellation Overview
Global Navigation Satellite Systems II AERO4701 Space Engineering 3 Week 4 Last Week Examined the problem of satellite coverage and constellation design Looked at the GPS satellite constellation Overview
Foreword by Glen Gibbons About this book Acknowledgments List of abbreviations and acronyms List of definitions
 Table of Foreword by Glen Gibbons About this book Acknowledgments List of abbreviations and acronyms List of definitions page xiii xix xx xxi xxv Part I GNSS: orbits, signals, and methods 1 GNSS ground
Table of Foreword by Glen Gibbons About this book Acknowledgments List of abbreviations and acronyms List of definitions page xiii xix xx xxi xxv Part I GNSS: orbits, signals, and methods 1 GNSS ground
GNSS Reflectometry and Passive Radar at DLR
 ACES and FUTURE GNSS-Based EARTH OBSERVATION and NAVIGATION 26./27. May 2008, TU München Dr. Thomas Börner, Microwaves and Radar Institute, DLR Overview GNSS Reflectometry a joined proposal of DLR and
ACES and FUTURE GNSS-Based EARTH OBSERVATION and NAVIGATION 26./27. May 2008, TU München Dr. Thomas Börner, Microwaves and Radar Institute, DLR Overview GNSS Reflectometry a joined proposal of DLR and
GPS Milestones, cont. GPS Milestones. The Global Positioning Sytem, Part 1 10/10/2017. M. Helper, GEO 327G/386G, UT Austin 1. US GPS Facts of Note
 The Global Positioning System US GPS Facts of Note DoD navigation system First launch on 22 Feb 1978, fully operational in 1994 ~$15 billion (?) invested to date 24 (+/-) Earth-orbiting satellites (SVs)
The Global Positioning System US GPS Facts of Note DoD navigation system First launch on 22 Feb 1978, fully operational in 1994 ~$15 billion (?) invested to date 24 (+/-) Earth-orbiting satellites (SVs)
Fast convergence of Trimble CenterPoint RTX by regional augmentation
 Fast convergence of Trimble CenterPoint RTX by regional augmentation Dr. Ralf Drescher Trimble Terrasat GmbH, Munich EGU General Assembly 2015, Vienna Thursday, 16 April 2015 Outline Introduction CenterPoint
Fast convergence of Trimble CenterPoint RTX by regional augmentation Dr. Ralf Drescher Trimble Terrasat GmbH, Munich EGU General Assembly 2015, Vienna Thursday, 16 April 2015 Outline Introduction CenterPoint
ProMark 500 White Paper
 ProMark 500 White Paper How Magellan Optimally Uses GLONASS in the ProMark 500 GNSS Receiver How Magellan Optimally Uses GLONASS in the ProMark 500 GNSS Receiver 1. Background GLONASS brings to the GNSS
ProMark 500 White Paper How Magellan Optimally Uses GLONASS in the ProMark 500 GNSS Receiver How Magellan Optimally Uses GLONASS in the ProMark 500 GNSS Receiver 1. Background GLONASS brings to the GNSS
GNSS for Landing Systems and Carrier Smoothing Techniques Christoph Günther, Patrick Henkel
 GNSS for Landing Systems and Carrier Smoothing Techniques Christoph Günther, Patrick Henkel Institute of Communications and Navigation Page 1 Instrument Landing System workhorse for all CAT-I III approach
GNSS for Landing Systems and Carrier Smoothing Techniques Christoph Günther, Patrick Henkel Institute of Communications and Navigation Page 1 Instrument Landing System workhorse for all CAT-I III approach
CONVERGENCE TIME IMPROVEMENT OF PRECISE POINT POSITIONING
 CONVERGENCE TIME IMPROVEMENT OF PRECISE POINT POSITIONING Mohamed Elsobeiey and Ahmed El-Rabbany Department of Civil Engineering (Geomatics Option) Ryerson University, CANADA Outline Introduction Impact
CONVERGENCE TIME IMPROVEMENT OF PRECISE POINT POSITIONING Mohamed Elsobeiey and Ahmed El-Rabbany Department of Civil Engineering (Geomatics Option) Ryerson University, CANADA Outline Introduction Impact
ESTIMATION OF IONOSPHERIC DELAY FOR SINGLE AND DUAL FREQUENCY GPS RECEIVERS: A COMPARISON
 ESTMATON OF ONOSPHERC DELAY FOR SNGLE AND DUAL FREQUENCY GPS RECEVERS: A COMPARSON K. Durga Rao, Dr. V B S Srilatha ndira Dutt Dept. of ECE, GTAM UNVERSTY Abstract: Global Positioning System is the emerging
ESTMATON OF ONOSPHERC DELAY FOR SNGLE AND DUAL FREQUENCY GPS RECEVERS: A COMPARSON K. Durga Rao, Dr. V B S Srilatha ndira Dutt Dept. of ECE, GTAM UNVERSTY Abstract: Global Positioning System is the emerging
Multipath and Atmospheric Propagation Errors in Offshore Aviation DGPS Positioning
 Multipath and Atmospheric Propagation Errors in Offshore Aviation DGPS Positioning J. Paul Collins, Peter J. Stewart and Richard B. Langley 2nd Workshop on Offshore Aviation Research Centre for Cold Ocean
Multipath and Atmospheric Propagation Errors in Offshore Aviation DGPS Positioning J. Paul Collins, Peter J. Stewart and Richard B. Langley 2nd Workshop on Offshore Aviation Research Centre for Cold Ocean
Asia Oceania Regional Workshop on GNSS Precise Point Positioning Experiment by using QZSS LEX
 Asia Oceania Regional Workshop on GNSS 2010 Precise Point Positioning Experiment by using QZSS LEX Tomoji TAKASU Tokyo University of Marine Science and Technology Contents Introduction of QZSS LEX Evaluation
Asia Oceania Regional Workshop on GNSS 2010 Precise Point Positioning Experiment by using QZSS LEX Tomoji TAKASU Tokyo University of Marine Science and Technology Contents Introduction of QZSS LEX Evaluation
Development and assessment of a medium-range real-time kinematic GPS algorithm using an ionospheric information filter
 LETTER Earth Planets Space, 52, 783 788, 2000 Development and assessment of a medium-range real-time kinematic GPS algorithm using an ionospheric information filter Ming Yang 1, Chin-Hsien Tang 1, and
LETTER Earth Planets Space, 52, 783 788, 2000 Development and assessment of a medium-range real-time kinematic GPS algorithm using an ionospheric information filter Ming Yang 1, Chin-Hsien Tang 1, and
Intersatellites Channel Emulator
 Intersatellites Channel Emulator Technical Specifications The Intersatellites Channel Emulator is a very accurate Channel Emulator with RF (or low IF) input and RF (or low IF) output with an excess Bandwidth
Intersatellites Channel Emulator Technical Specifications The Intersatellites Channel Emulator is a very accurate Channel Emulator with RF (or low IF) input and RF (or low IF) output with an excess Bandwidth
POWERGPS : A New Family of High Precision GPS Products
 POWERGPS : A New Family of High Precision GPS Products Hiroshi Okamoto and Kazunori Miyahara, Sokkia Corp. Ron Hatch and Tenny Sharpe, NAVCOM Technology Inc. BIOGRAPHY Mr. Okamoto is the Manager of Research
POWERGPS : A New Family of High Precision GPS Products Hiroshi Okamoto and Kazunori Miyahara, Sokkia Corp. Ron Hatch and Tenny Sharpe, NAVCOM Technology Inc. BIOGRAPHY Mr. Okamoto is the Manager of Research