Digital photography , , Computational Photography Fall 2018, Lecture 2
|
|
|
- Matthew Lawrence
- 5 years ago
- Views:
Transcription

1 Digital photography , , Computational Photography Fall 2018, Lecture 2
2 Course announcements To the 26 students who took the start-of-semester survey: Thanks! The other 14 students who didn t: Please do so before the next lecture! Waitlist issues will (probably) be resolved next week. No lecture on Monday (Labor day). Homework 1 will be posted on Friday, will be due September 14 th at midnight. Readings will be listed on slides as references. Office hours for this week only (will finalize them after more people have taken the survey): Alankar Thursday 2-4 pm, Smith Hall 220. Yannis Friday 3-5 pm, Smith Hall 225.
3 Course announcements Is there anyone not on Piazza? Is there anyone not on Canvas?
4 Overview of today s lecture Imaging sensor primer. Color primer. In-camera image processing pipeline. Some general thoughts on the image processing pipeline. Take-home message: The values of pixels in a photograph and the values output by your camera s sensor are two very different things.
5 Slide credits A lot of inspiration and quite a few examples for these slides were taken directly from: Kayvon Fatahalian (15-769, Fall 2016). Michael Brown (CVPR 2016 Tutorial on understanding the image processing pipeline).
6 The modern photography pipeline
7 The modern photography pipeline post-capture processing (lectures 5-10) optics and optical controls (lectures 2-3, 11-20) sensor, analog front-end, and color filter array (today, lecture 23) in-camera image processing pipeline (today)
8 Imaging sensor primer

9 Imaging sensors Very high-level overview of digital imaging sensors. We could spend an entire course covering imaging sensors. Lecture 23 will cover sensors and noise issues in more detail. Canon 6D sensor (20.20 MP, full-frame)



10 What does an imaging sensor do? When the camera shutter opens exposure begins photons array of photon buckets close-up view of photon buckets photon buckets begin to store photons... until the camera shutter closes. Then, they convert stored photons to intensity values.
11 Nobel Prize in Physics Who is this?
12 Nobel Prize in Physics What is he known for?
13 Photoelectric effect incident photons emitted electrons Albert Einstein Einstein s Nobel Prize in 1921 for his services to Theoretical Physics, and especially for his discovery of the law of the photoelectric effect
14 Basic imaging sensor design microlens color filter photodiode potential well helps photodiode collect more light (also called lenslet) microlens color filter photodiode potential well Lenslets also filter the image to avoid resolution artifacts. Lenslets are problematic when working with coherent light. Many modern cameras do not have lenslet arrays. We will discuss these issues in more detail at a later lecture. silicon for readout etc. circuitry stores emitted electrons made of silicon, emits electrons from photons We will see what the color filters are for later in this lecture.
15 Photodiode quantum efficiency (QE) How many of the incident photons will the photodiode convert into electrons? QE = # electrons # photons incident photons emitted electrons Fundamental optical performance metric of imaging sensors. Not the only important optical performance metric! We will see a few more later in the lecture.
 non-linear near zero (due to noise) We will see")
 over-exposure (non-linearity due to")
16 Photodiode response function For silicon photodiodes, usually linear, but: non-linear when potential well is saturated (over-exposure) non-linear near zero (due to noise) We will see how to deal with these issues in a later lecture (high-dynamic-range imaging). under-exposure (non-linearity due to sensor noise) over-exposure (non-linearity due to sensor saturation)

17 Photodiode full well capacity How many electrons can photodiode store before saturation? Another important optical performance metric of imaging sensors.
18 Two main types of imaging sensors Do you know them?
19 Two main types of imaging sensors Charged Coupled Device (CCD): converts electrons to voltage using readout circuitry separate from pixel Complementary Metal Oxide Semiconductor (CMOS): converts electrons to voltage using per-pixel readout circuitry Can you think of advantages and disadvantages of each type?


20 Two main types of imaging sensors Charged Coupled Device (CCD): converts electrons to voltage using readout circuitry separate from pixel Complementary Metal Oxide Semiconductor (CMOS): converts electrons to voltage using per-pixel readout circuitry higher sensitivity lower noise faster read-out lower cost


21 CCD vs CMOS Modern CMOS sensors have optical performance comparable to CCD sensors. Most modern commercial and industrial cameras use CMOS sensors.
22 CMOS sensor (very) simplified layout photodiode (pixel) row selection register active pixel sensor (2D array of pixels) row buffer optically black region (no light gets here) Can anyone guess why there are pixels in the optically black region? exposed region (light gets here) analog front-end bits
23 Analog front-end analog voltage analog voltage discrete signal discrete signal analog amplifier (gain): gets voltage in range needed by A/D converter. accommodates ISO settings. accounts for vignetting. analog-to-digital converter (ADC): depending on sensor, output has bits. most often (?) 12 bits. look-up table (LUT): corrects non-linearities in sensor s response function (within proper exposure). corrects defective pixels.


24 Vignetting Fancy word for: pixels far off the center receive less light white wall under uniform light more interesting example of vignetting




25 Vignetting Four types of vignetting: Mechanical: light rays blocked by hoods, filters, and other objects. Lens: similar, but light rays blocked by lens elements. Natural: due to radiometric laws ( cosine fourth falloff ). Pixel: angle-dependent sensitivity of photodiodes. non-uniform gain
26 What does an imaging sensor do? When the camera shutter opens, the sensor: at every photodiode, converts incident photons into electrons stores electrons into the photodiode s potential well while it is not full until camera shutter closes. Then, the analog front-end: reads out photodiodes wells, row-by-row, and converts them to analog signals applies a (possibly non-uniform) gain to these analog signals converts them to digital signals corrects non-linearities and finally returns an image.
27 Remember these? microlens color filter photodiode potential well helps photodiode collect more light (also called lenslet) microlens color filter photodiode potential well Lenslets also filter the image to avoid resolution artifacts. Lenslets are problematic when working with coherent light. Many modern cameras do not have lenslet arrays. We will discuss these issues in more detail at a later lecture. silicon for readout etc. circuitry stores emitted electrons made of silicon, emits electrons from photons We will see what the color filters are for later in this lecture.
28 Color primer

29 Color Very high-level of color as it relates to digital photography. We could spend an entire course covering color. We will discuss color in more detail in a later lecture. color is complicated

30 Color is an artifact of human perception Color is not an objective physical property of light (electromagnetic radiation). Instead, light is characterized by its wavelength. electromagnetic spectrum What we call color is how we subjectively perceive a very small range of these wavelengths.

31 Spectral Power Distribution (SPD) Most types of light contain more than one wavelengths. We can describe light based on the distribution of power over different wavelengths. We call our sensation of all of these distributions white.
32 Spectral Sensitivity Function (SSF) Any light sensor (digital or not) has different sensitivity to different wavelengths. This is described by the sensor s spectral sensitivity function. When measuring light of a some SPD, the sensor produces a scalar response: light SPD sensor SSF sensor response Weighted combination of light s SPD: light contributes more at wavelengths where the sensor has higher sensitivity.
.")
33 Spectral Sensitivity Function of Human Eye The human eye is a collection of light sensors called cone cells. There are three types of cells with different spectral sensitivity functions. Human color perception is three-dimensional (tristimulus color). short medium cone distribution for normal vision (64% L, 32% M) long
34 Color filter arrays (CFA) To measure color with a digital sensor, mimic cone cells of human vision system. Cones correspond to pixels that are covered by different color filters, each with its own spectral sensitivity function. microlens color filter photodiode potential well microlens color filter photodiode potential well microlens color filter photodiode potential well
 different color filters? Bayer mosaic SSF for Canon 50D Why more green pixels?")
35 What color filters to use? Two design choices: What spectral sensitivity functions to use for each color filter? How to spatially arrange ( mosaic ) different color filters? Bayer mosaic SSF for Canon 50D Why more green pixels? Generally do not match human LMS.



36 Many different CFAs Finding the best CFA mosaic is an active research area. CYGM Canon IXUS, Powershot RGBE Sony Cyber-shot How would you go about designing your own CFA? What criteria would you consider?

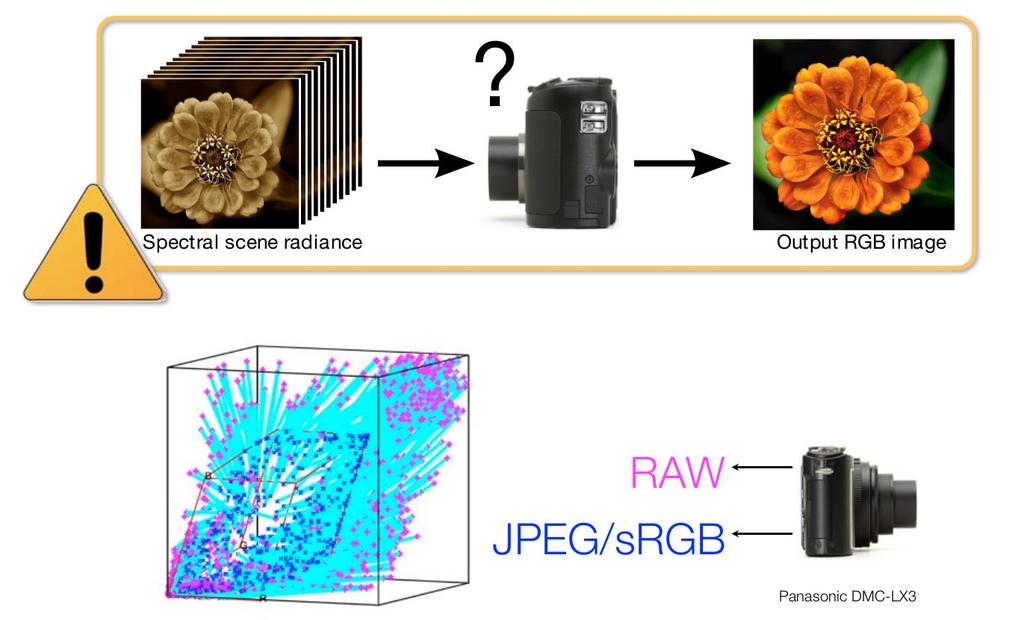
37 Many different spectral sensitivity functions Each camera has its more or less unique, and most of the time secret, SSF. Makes it very difficult to correctly reproduce the color of sensor measurements. We will see more about this in the color lecture. Images of the same scene captured using 3 different cameras with identical settings.
38 Aside: can you think of other ways to capture color?

39 Aside: can you think of other ways to capture color? [Slide credit: Gordon Wetzstein]
40 What does an imaging sensor do? When the camera shutter opens, the sensor: at every photodiode, converts incident photons into electrons using mosaic s SSF stores electrons into the photodiode s potential well while it is not full until camera shutter closes. Then, the analog front-end: reads out photodiodes wells, row-by-row, and converts them to analog signals applies a (possibly non-uniform) gain to these analog signals converts them to digital signals corrects non-linearities and finally returns an image.


41 After all of this, what does an image look like? lots of noise mosaicking artifacts Kind of disappointing. We call this the RAW image.
42 The modern photography pipeline post-capture processing (lectures 5-10) optics and optical controls (lectures 2-3, 11-20) sensor, analog front-end, and color filter array (today, lecture 23) in-camera image processing pipeline (today)
43 The in-camera image processing pipeline
44 The (in-camera) image processing pipeline The sequence of image processing operations applied by the camera s image signal processor (ISP) to convert a RAW image into a conventional image. denoising CFA demosaicing analog frontend white balance RAW image (mosaiced, linear, 12-bit) color transforms tone reproduction compression final RGB image (nonlinear, 8-bit)
45 Quick notes on terminology Sometimes the term image signal processor (ISP) is used to refer to the image processing pipeline itself. The process of converting a RAW image to a conventional image is often called rendering (unrelated to the image synthesis procedure of the same name in graphics). The inverse process, going from a conventional image back to RAW is called derendering.
46 The (in-camera) image processing pipeline The sequence of image processing operations applied by the camera s image signal processor (ISP) to convert a RAW image into a conventional image. denoising CFA demosaicing analog frontend white balance RAW image (mosaiced, linear, 12-bit) see color lecture see color transforms tone reproduction compression final RGB image (nonlinear, 8-bit)
47 The (in-camera) image processing pipeline The sequence of image processing operations applied by the camera s image signal processor (ISP) to convert a RAW image into a conventional image. denoising CFA demosaicing analog frontend white balance RAW image (mosaiced, linear, 12-bit) color transforms tone reproduction compression final RGB image (nonlinear, 8-bit)
48 White balancing Human visual system has chromatic adaptation: We can perceive white (and other colors) correctly under different light sources. [Slide credit: Todd Zickler]
 correctly under different light sources. Retinal vs perceived color.")
49 White balancing Human visual system has chromatic adaptation: We can perceive white (and other colors) correctly under different light sources. Retinal vs perceived color. [Slide credit: Todd Zickler]

50 White balancing Human visual system has chromatic adaptation: We can perceive white (and other colors) correctly under different light sources. Cameras cannot do that (there is no camera perception ). White balancing: The process of removing color casts so that colors that we would perceive as white are rendered as white in final image. different whites image captured under fluorescent image whitebalanced to daylight

51 White balancing presets Cameras nowadays come with a large number of presets: You can select which light you are taking images under, and the appropriate white balancing is applied.
52 Manual vs automatic white balancing Manual white balancing: Select a camera preset based on lighting. Can you think of any other way to do manual white balancing?
53 Manual vs automatic white balancing Manual white balancing: Select a camera preset based on lighting. Manually select object in photograph that is color-neutral and use it to normalize. How can we do automatic white balancing?


54 Manual vs automatic white balancing Manual white balancing: Select a camera preset based on lighting. Manually select object in photograph that is color-neutral and use it to normalize. Automatic white balancing: Grey world assumption: force average color of scene to be grey. White world assumption: force brightest object in scene to be white. Sophisticated histogram-based algorithms (what most modern cameras do).
55 Automatic white balancing Grey world assumption: Compute per-channel average. Normalize each channel by its average. Normalize by green channel average. white-balanced RGB sensor RGB White world assumption: Compute per-channel maximum. Normalize each channel by its maximum. Normalize by green channel maximum. white-balanced RGB sensor RGB

56 Automatic white balancing example input image grey world white world
57 The (in-camera) image processing pipeline The sequence of image processing operations applied by the camera s image signal processor (ISP) to convert a RAW image into a conventional image. denoising CFA demosaicing analog frontend white balance RAW image (mosaiced, linear, 12-bit) color transforms tone reproduction compression final RGB image (nonlinear, 8-bit)
58 CFA demosaicing Produce full RGB image from mosaiced sensor output. Any ideas on how to do this?
59 CFA demosaicing Produce full RGB image from mosaiced sensor output. Interpolate from neighbors: Bilinear interpolation (needs 4 neighbors). Bicubic interpolation (needs more neighbors, may overblur). Edge-aware interpolation (more on this later).
60 Demosaicing by bilinear interpolation Bilinear interpolation: Simply average your 4 neighbors. G 1 G? G4 G 2 G? = G 1 + G 2 + G 3 + G 4 G 3 4 Neighborhood changes for different channels:
61 The (in-camera) image processing pipeline The sequence of image processing operations applied by the camera s image signal processor (ISP) to convert a RAW image into a conventional image. denoising CFA demosaicing analog frontend white balance RAW image (mosaiced, linear, 12-bit) color transforms tone reproduction compression final RGB image (nonlinear, 8-bit)


62 Can be very pronounced in low-light images. Noise in images
63 Three types of sensor noise 1) (Photon) shot noise: Photon arrival rates are a random process (Poisson distribution). The brighter the scene, the smaller the variance of the distribution. 2) Dark-shot noise: Emitted electrons due to thermal activity (becomes worse as sensor gets hotter.) 3) Read noise: Caused by read-out and AFE electronics (e.g., gain, A/D converter). Bright scene and large pixels: photon shot noise is the main noise source.
64 How to denoise?
65 How to denoise? Look at the neighborhood around you. I 1 I 2 I 3 I 4 I 5 I 6 Mean filtering (take average): I 7 I8 I 9 I 5 = I 1 + I 2 + I 3 + I 4 + I 5 + I 6 + I 7 + I 8 + I 9 9 Median filtering (take median): I 5 = median( I 1, I 2, I 3, I 4, I 5, I 6, I 7, I 8, I 9 ) Large area of research. We will see some more about filtering in a later lecture.
66 The (in-camera) image processing pipeline The sequence of image processing operations applied by the camera s image signal processor (ISP) to convert a RAW image into a conventional image. denoising CFA demosaicing analog frontend white balance RAW image (mosaiced, linear, 12-bit) color transforms tone reproduction compression final RGB image (nonlinear, 8-bit)
67 Tone reproduction Also known as gamma encoding (and erroneously as gamma correction). Without tone reproduction, images look very dark. Why does this happen?
68 Perceived vs measured brightness by human eye We have already seen that sensor response is linear. Human-eye response (measured brightness) is also linear. However, human-eye perception (perceived brightness) is non-linear: More sensitive to dark tones. Approximately a Gamma function.
69 What about displays? We have already seen that sensor response is linear. Human-eye response (measured brightness) is also linear. However, human-eye perception (perceived brightness) is non-linear: More sensitive to dark tones. Approximately a Gamma function. Displays have a response opposite to that of human perception.
70 Tone reproduction Because of mismatch in displays and human eye perception, images look very dark. How do we fix this?


71 Tone reproduction Because of mismatch in displays and human eye perception, images look very dark. Pre-emptively cancel-out the display response curve. Add inverse display transform here. This transform is the tone reproduction or gamma correction.
. A good default is γ = 2.")
72 Tone reproduction curves The exact tone reproduction curve depends on the camera. Often well approximated as L γ, for different values of the power γ ( gamma ). A good default is γ = 2.2. before gamma after gamma Warning: Our values are no longer linear relative to scene radiance!
73 Tone reproduction Question: Why not just keep measurements linear and do gamma correction right before we display the image?
74 Tone reproduction Question: Why not just keep measurements linear and do gamma correction right before we display the image? Answer: After this stage, we perform compression, which includes change from 12 to 8 bits. Better to use our available bits to encode the information we are going to need.
75 The (in-camera) image processing pipeline The sequence of image processing operations applied by the camera s image signal processor (ISP) to convert a RAW image into a conventional image. denoising CFA demosaicing analog frontend white balance RAW image (mosaiced, linear, 12-bit) color transforms tone reproduction compression final RGB image (nonlinear, 8-bit)
76 Some general thoughts on the image processing pipeline
77 Do I ever need to use RAW?
78 Do I ever need to use RAW? Emphatic yes! Every time you use a physics-based computer vision algorithm, you need linear measurements of radiance. Examples: photometric stereo, shape from shading, image-based relighting, illumination estimation, anything to do with light transport and inverse rendering, etc. Applying the algorithms on non-linear (i.e., not RAW) images will produce completely invalid results.
79 What if I don t care about physics-based vision?
80 What if I don t care about physics-based vision? You often still want (rather than need) to use RAW! If you like re-finishing your photos (e.g., on Photoshop), RAW makes your life much easier and your edits much more flexible.
81 Are there any downsides to using RAW?
82 Are there any downsides to using RAW? Image files are a lot bigger. You burn through multiple memory cards. Your camera will buffer more often when shooting in burst mode. Your computer needs to have sufficient memory to process RAW images.
83 Is it even possible to get access to RAW images?
84 Is it even possible to get access to RAW images? Quite often yes! Most high-end cameras provide an option to store RAW image files. Certain phone cameras allow, directly or indirectly, access to RAW. Sometimes, it may not be fully RAW. The Lightroom app provides images after demosaicking but before tone reproduction.
85 I forgot to set my camera to RAW, can I still get the RAW file? Nope, tough luck. The image processing pipeline is lossy: After all the steps, information about the original image is lost. Sometimes we may be able to reverse a camera s image processing pipeline if we know exactly what it does (e.g., by using information from other similar RAW images). The conversion of PNG/JPG back to RAW is known as derendering and is an active research area.
86 Derendering
87 Why did you use italics in the previous slide? What I described today is an idealized version of what we think commercial cameras do. Almost all of the steps in both the sensor and image processing pipeline I described earlier are camera-dependent. Even if we know the basic steps, the implementation details are proprietary information that companies actively try to keep secret. I will go back to a few of my slides to show you examples of the above.
88 The hypothetical image processing pipeline The sequence of image processing operations applied by the camera s image signal processor (ISP) to convert a RAW image into a conventional image. denoising? CFA demosaicing? analog frontend? white balance? RAW image (mosaiced, linear, 12-bit) color transforms? tone reproduction? compression? final RGB image (nonlinear, 8-bit)
89 The hypothetical analog front-end analog voltage analog voltage discrete signal discrete signal analog amplifier (gain): gets voltage in range needed by A/D converter? accommodates ISO settings? accounts for vignetting? analog-to-digital converter (ADC): depending on sensor, output has bits. most often (?) 12 bits. look-up table (LUT): corrects non-linearities in sensor s response function (within proper exposure)? corrects defective pixels?
90 Various curves All of these sensitivity curves are different from camera to camera and kept secret.
91 Serious inhibition for research Very difficult to get access to ground-truth data at intermediate stages of the pipeline. Very difficult to evaluate effect of new algorithms for specific pipeline stages.

92 but things are getting better


93 but things are getting better
94 How do I open a RAW file in Matlab? You can t (not easily at least). You need to use one of the following: dcraw tool for parsing camera-dependent RAW files (specification of file formats are also kept secret). Adobe DNG recently(-ish) introduced file format that attempts to standardize RAW file handling. See Homework 1 for more details.
95 Is this the best image processing pipeline? It depends on how you define best. This definition is task-dependent. The standard image processing pipeline is designed to create nice-looking images. If you want to do physics-based vision, the best image processing pipeline is no pipeline at all (use RAW). What if you want to use images for, e.g., object recognition? Tracking? Robotics SLAM? Face identification? Forensics? Developing task-adaptive image processing pipelines is an active area of research.
96 Take-home messages The values of pixels in a photograph and the values output by your camera s sensor are two very different things. The relationship between the two is complicated and unknown.
97 References Basic reading: Szeliski textbook, Section 2.3. Michael Brown, Understanding the In-Camera Image Processing Pipeline for Computer Vision, CVPR 2016, slides available at: Additional reading: Adams et al., The Frankencamera: An Experimental Platform for Computational Photography, SIGGRAPH The first open architecture for the image processing pipeline, and precursor to the Android Camera API. Heide et al., FlexISP: A Flexible Camera Image Processing Framework, SIGGRAPH Asia Discusses how to implement a single-stage image processing pipeline. Buckler et al., Reconfiguring the Imaging Pipeline for Computer Vision, ICCV Diamond et al., Dirty Pixels: Optimizing Image Classification Architectures for Raw Sensor Data, arxiv Both papers discuss how to adaptively change the conventional image processing pipeline so that it is better suited to various computer vision problems. Chakrabarti et al., Rethinking Color Cameras, ICCP Discusses different CFAs, including ones that have white filters, and how to do demosaicing for them. Gunturk et al., Demosaicking: Color Filter Array Interpolation, IEEE Signal Processing Magazine 2005 A nice review of demosaicing algorithms. Chakrabarti et al., Probabilistic Derendering of Camera Tone-mapped Images, PAMI Discusses how to (attempt to) derender an image that has already gone through the image processing pipeline of some (partially calibrated) camera.
Digital photography , , Computational Photography Fall 2017, Lecture 2
 Digital photography http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 2 Course announcements To the 14 students who took the course survey on
Digital photography http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 2 Course announcements To the 14 students who took the course survey on
Camera Image Processing Pipeline
 Lecture 13: Camera Image Processing Pipeline Visual Computing Systems Today (actually all week) Operations that take photons hitting a sensor to a high-quality image Processing systems used to efficiently
Lecture 13: Camera Image Processing Pipeline Visual Computing Systems Today (actually all week) Operations that take photons hitting a sensor to a high-quality image Processing systems used to efficiently
Color , , Computational Photography Fall 2018, Lecture 7
 Color http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 7 Course announcements Homework 2 is out. - Due September 28 th. - Requires camera and
Color http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 7 Course announcements Homework 2 is out. - Due September 28 th. - Requires camera and
Color , , Computational Photography Fall 2017, Lecture 11
 Color http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 11 Course announcements Homework 2 grades have been posted on Canvas. - Mean: 81.6% (HW1:
Color http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 11 Course announcements Homework 2 grades have been posted on Canvas. - Mean: 81.6% (HW1:
High dynamic range imaging and tonemapping
 High dynamic range imaging and tonemapping http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 12 Course announcements Homework 3 is out. - Due
High dynamic range imaging and tonemapping http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 12 Course announcements Homework 3 is out. - Due
Lenses, exposure, and (de)focus
focus") Lenses, exposure, and (de)focus http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 15 Course announcements Homework 4 is out. - Due October 26
Lenses, exposure, and (de)focus http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 15 Course announcements Homework 4 is out. - Due October 26
Lecture 29: Image Sensors. Computer Graphics and Imaging UC Berkeley CS184/284A
 Lecture 29: Image Sensors Computer Graphics and Imaging UC Berkeley Photon Capture The Photoelectric Effect Incident photons Ejected electrons Albert Einstein (wikipedia) Einstein s Nobel Prize in 1921
Lecture 29: Image Sensors Computer Graphics and Imaging UC Berkeley Photon Capture The Photoelectric Effect Incident photons Ejected electrons Albert Einstein (wikipedia) Einstein s Nobel Prize in 1921
Camera Image Processing Pipeline: Part II
 Lecture 14: Camera Image Processing Pipeline: Part II Visual Computing Systems Today Finish image processing pipeline Auto-focus / auto-exposure Camera processing elements Smart phone processing elements
Lecture 14: Camera Image Processing Pipeline: Part II Visual Computing Systems Today Finish image processing pipeline Auto-focus / auto-exposure Camera processing elements Smart phone processing elements
Color Computer Vision Spring 2018, Lecture 15
 Color http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 15 Course announcements Homework 4 has been posted. - Due Friday March 23 rd (one-week homework!) - Any questions about the
Color http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 15 Course announcements Homework 4 has been posted. - Due Friday March 23 rd (one-week homework!) - Any questions about the
Camera Image Processing Pipeline: Part II
 Lecture 13: Camera Image Processing Pipeline: Part II Visual Computing Systems Today Finish image processing pipeline Auto-focus / auto-exposure Camera processing elements Smart phone processing elements
Lecture 13: Camera Image Processing Pipeline: Part II Visual Computing Systems Today Finish image processing pipeline Auto-focus / auto-exposure Camera processing elements Smart phone processing elements
Lecture 30: Image Sensors (Cont) Computer Graphics and Imaging UC Berkeley CS184/284A
 Computer Graphics and Imaging UC Berkeley CS184/284A") Lecture 30: Image Sensors (Cont) Computer Graphics and Imaging UC Berkeley Reminder: The Pixel Stack Microlens array Color Filter Anti-Reflection Coating Stack height 4um is typical Pixel size 2um is typical
Lecture 30: Image Sensors (Cont) Computer Graphics and Imaging UC Berkeley Reminder: The Pixel Stack Microlens array Color Filter Anti-Reflection Coating Stack height 4um is typical Pixel size 2um is typical
Tonemapping and bilateral filtering
 Tonemapping and bilateral filtering http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 6 Course announcements Homework 2 is out. - Due September
Tonemapping and bilateral filtering http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 6 Course announcements Homework 2 is out. - Due September
Image Formation and Capture
 Figure credits: B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, A. Theuwissen, and J. Malik Image Formation and Capture COS 429: Computer Vision Image Formation and Capture Real world Optics Sensor Devices
Figure credits: B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, A. Theuwissen, and J. Malik Image Formation and Capture COS 429: Computer Vision Image Formation and Capture Real world Optics Sensor Devices
Image acquisition. In both cases, the digital sensing element is one of the following: Line array Area array. Single sensor
 Image acquisition Digital images are acquired by direct digital acquisition (digital still/video cameras), or scanning material acquired as analog signals (slides, photographs, etc.). In both cases, the
Image acquisition Digital images are acquired by direct digital acquisition (digital still/video cameras), or scanning material acquired as analog signals (slides, photographs, etc.). In both cases, the
Noise and ISO. CS 178, Spring Marc Levoy Computer Science Department Stanford University
 Noise and ISO CS 178, Spring 2014 Marc Levoy Computer Science Department Stanford University Outline examples of camera sensor noise don t confuse it with JPEG compression artifacts probability, mean,
Noise and ISO CS 178, Spring 2014 Marc Levoy Computer Science Department Stanford University Outline examples of camera sensor noise don t confuse it with JPEG compression artifacts probability, mean,
IMAGE RESTORATION WITH NEURAL NETWORKS. Orazio Gallo Work with Hang Zhao, Iuri Frosio, Jan Kautz
 IMAGE RESTORATION WITH NEURAL NETWORKS Orazio Gallo Work with Hang Zhao, Iuri Frosio, Jan Kautz MOTIVATION The long path of images Bad Pixel Correction Black Level AF/AE Demosaic Denoise Lens Correction
IMAGE RESTORATION WITH NEURAL NETWORKS Orazio Gallo Work with Hang Zhao, Iuri Frosio, Jan Kautz MOTIVATION The long path of images Bad Pixel Correction Black Level AF/AE Demosaic Denoise Lens Correction
Deconvolution , , Computational Photography Fall 2018, Lecture 12
 Deconvolution http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 12 Course announcements Homework 3 is out. - Due October 12 th. - Any questions?
Deconvolution http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 12 Course announcements Homework 3 is out. - Due October 12 th. - Any questions?
CS 89.15/189.5, Fall 2015 ASPECTS OF DIGITAL PHOTOGRAPHY COMPUTATIONAL. Image Processing Basics. Wojciech Jarosz
 CS 89.15/189.5, Fall 2015 COMPUTATIONAL ASPECTS OF DIGITAL PHOTOGRAPHY Image Processing Basics Wojciech Jarosz wojciech.k.jarosz@dartmouth.edu Domain, range Domain vs. range 2D plane: domain of images
CS 89.15/189.5, Fall 2015 COMPUTATIONAL ASPECTS OF DIGITAL PHOTOGRAPHY Image Processing Basics Wojciech Jarosz wojciech.k.jarosz@dartmouth.edu Domain, range Domain vs. range 2D plane: domain of images
A simulation tool for evaluating digital camera image quality
 A simulation tool for evaluating digital camera image quality Joyce Farrell ab, Feng Xiao b, Peter Catrysse b, Brian Wandell b a ImagEval Consulting LLC, P.O. Box 1648, Palo Alto, CA 94302-1648 b Stanford
A simulation tool for evaluating digital camera image quality Joyce Farrell ab, Feng Xiao b, Peter Catrysse b, Brian Wandell b a ImagEval Consulting LLC, P.O. Box 1648, Palo Alto, CA 94302-1648 b Stanford
Lecture Notes 11 Introduction to Color Imaging
 Lecture Notes 11 Introduction to Color Imaging Color filter options Color processing Color interpolation (demozaicing) White balancing Color correction EE 392B: Color Imaging 11-1 Preliminaries Up till
Lecture Notes 11 Introduction to Color Imaging Color filter options Color processing Color interpolation (demozaicing) White balancing Color correction EE 392B: Color Imaging 11-1 Preliminaries Up till
Image Formation and Capture. Acknowledgment: some figures by B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, and A. Theuwissen
 Image Formation and Capture Acknowledgment: some figures by B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, and A. Theuwissen Image Formation and Capture Real world Optics Sensor Devices Sources of Error
Image Formation and Capture Acknowledgment: some figures by B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, and A. Theuwissen Image Formation and Capture Real world Optics Sensor Devices Sources of Error
Improved sensitivity high-definition interline CCD using the KODAK TRUESENSE Color Filter Pattern
 Improved sensitivity high-definition interline CCD using the KODAK TRUESENSE Color Filter Pattern James DiBella*, Marco Andreghetti, Amy Enge, William Chen, Timothy Stanka, Robert Kaser (Eastman Kodak
Improved sensitivity high-definition interline CCD using the KODAK TRUESENSE Color Filter Pattern James DiBella*, Marco Andreghetti, Amy Enge, William Chen, Timothy Stanka, Robert Kaser (Eastman Kodak
Introduction to Computer Vision
 Introduction to Computer Vision CS / ECE 181B Thursday, April 1, 2004 Course Details HW #0 and HW #1 are available. Course web site http://www.ece.ucsb.edu/~manj/cs181b Syllabus, schedule, lecture notes,
Introduction to Computer Vision CS / ECE 181B Thursday, April 1, 2004 Course Details HW #0 and HW #1 are available. Course web site http://www.ece.ucsb.edu/~manj/cs181b Syllabus, schedule, lecture notes,
General Imaging System
 General Imaging System Lecture Slides ME 4060 Machine Vision and Vision-based Control Chapter 5 Image Sensing and Acquisition By Dr. Debao Zhou 1 2 Light, Color, and Electromagnetic Spectrum Penetrate
General Imaging System Lecture Slides ME 4060 Machine Vision and Vision-based Control Chapter 5 Image Sensing and Acquisition By Dr. Debao Zhou 1 2 Light, Color, and Electromagnetic Spectrum Penetrate
DIGITAL IMAGING. Handbook of. Wiley VOL 1: IMAGE CAPTURE AND STORAGE. Editor-in- Chief
 Handbook of DIGITAL IMAGING VOL 1: IMAGE CAPTURE AND STORAGE Editor-in- Chief Adjunct Professor of Physics at the Portland State University, Oregon, USA Previously with Eastman Kodak; University of Rochester,
Handbook of DIGITAL IMAGING VOL 1: IMAGE CAPTURE AND STORAGE Editor-in- Chief Adjunct Professor of Physics at the Portland State University, Oregon, USA Previously with Eastman Kodak; University of Rochester,
Coded photography , , Computational Photography Fall 2017, Lecture 18
 Coded photography http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 18 Course announcements Homework 5 delayed for Tuesday. - You will need cameras
Coded photography http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 18 Course announcements Homework 5 delayed for Tuesday. - You will need cameras
IMPROVEMENTS ON SOURCE CAMERA-MODEL IDENTIFICATION BASED ON CFA INTERPOLATION
 IMPROVEMENTS ON SOURCE CAMERA-MODEL IDENTIFICATION BASED ON CFA INTERPOLATION Sevinc Bayram a, Husrev T. Sencar b, Nasir Memon b E-mail: sevincbayram@hotmail.com, taha@isis.poly.edu, memon@poly.edu a Dept.
IMPROVEMENTS ON SOURCE CAMERA-MODEL IDENTIFICATION BASED ON CFA INTERPOLATION Sevinc Bayram a, Husrev T. Sencar b, Nasir Memon b E-mail: sevincbayram@hotmail.com, taha@isis.poly.edu, memon@poly.edu a Dept.
Digital Photographs, Image Sensors and Matrices
 Digital Photographs, Image Sensors and Matrices Digital Camera Image Sensors Electron Counts Checkerboard Analogy Bryce Bayer s Color Filter Array Mosaic. Image Sensor Data to Matrix Data Visualization
Digital Photographs, Image Sensors and Matrices Digital Camera Image Sensors Electron Counts Checkerboard Analogy Bryce Bayer s Color Filter Array Mosaic. Image Sensor Data to Matrix Data Visualization
EE 392B: Course Introduction
 EE 392B Course Introduction About EE392B Goals Topics Schedule Prerequisites Course Overview Digital Imaging System Image Sensor Architectures Nonidealities and Performance Measures Color Imaging Recent
EE 392B Course Introduction About EE392B Goals Topics Schedule Prerequisites Course Overview Digital Imaging System Image Sensor Architectures Nonidealities and Performance Measures Color Imaging Recent
CS6640 Computational Photography. 6. Color science for digital photography Steve Marschner
 CS6640 Computational Photography 6. Color science for digital photography 2012 Steve Marschner 1 What visible light is One octave of the electromagnetic spectrum (380-760nm) NASA/Wikimedia Commons 2 What
CS6640 Computational Photography 6. Color science for digital photography 2012 Steve Marschner 1 What visible light is One octave of the electromagnetic spectrum (380-760nm) NASA/Wikimedia Commons 2 What
Introduction to 2-D Copy Work
 Introduction to 2-D Copy Work What is the purpose of creating digital copies of your analogue work? To use for digital editing To submit work electronically to professors or clients To share your work
Introduction to 2-D Copy Work What is the purpose of creating digital copies of your analogue work? To use for digital editing To submit work electronically to professors or clients To share your work
TRUESENSE SPARSE COLOR FILTER PATTERN OVERVIEW SEPTEMBER 30, 2013 APPLICATION NOTE REVISION 1.0
 TRUESENSE SPARSE COLOR FILTER PATTERN OVERVIEW SEPTEMBER 30, 2013 APPLICATION NOTE REVISION 1.0 TABLE OF CONTENTS Overview... 3 Color Filter Patterns... 3 Bayer CFA... 3 Sparse CFA... 3 Image Processing...
TRUESENSE SPARSE COLOR FILTER PATTERN OVERVIEW SEPTEMBER 30, 2013 APPLICATION NOTE REVISION 1.0 TABLE OF CONTENTS Overview... 3 Color Filter Patterns... 3 Bayer CFA... 3 Sparse CFA... 3 Image Processing...
Coded photography , , Computational Photography Fall 2018, Lecture 14
 Coded photography http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 14 Overview of today s lecture The coded photography paradigm. Dealing with
Coded photography http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 14 Overview of today s lecture The coded photography paradigm. Dealing with
Digital Cameras The Imaging Capture Path
 Manchester Group Royal Photographic Society Imaging Science Group Digital Cameras The Imaging Capture Path by Dr. Tony Kaye ASIS FRPS Silver Halide Systems Exposure (film) Processing Digital Capture Imaging
Manchester Group Royal Photographic Society Imaging Science Group Digital Cameras The Imaging Capture Path by Dr. Tony Kaye ASIS FRPS Silver Halide Systems Exposure (film) Processing Digital Capture Imaging
WHITE PAPER. Guide to CCD-Based Imaging Colorimeters
 Guide to CCD-Based Imaging Colorimeters How to choose the best imaging colorimeter CCD-based instruments offer many advantages for measuring light and color. When configured effectively, CCD imaging systems
Guide to CCD-Based Imaging Colorimeters How to choose the best imaging colorimeter CCD-based instruments offer many advantages for measuring light and color. When configured effectively, CCD imaging systems
Photons and solid state detection
 Photons and solid state detection Photons represent discrete packets ( quanta ) of optical energy Energy is hc/! (h: Planck s constant, c: speed of light,! : wavelength) For solid state detection, photons
Photons and solid state detection Photons represent discrete packets ( quanta ) of optical energy Energy is hc/! (h: Planck s constant, c: speed of light,! : wavelength) For solid state detection, photons
Dynamic Range. H. David Stein
 Dynamic Range H. David Stein Dynamic Range What is dynamic range? What is low or limited dynamic range (LDR)? What is high dynamic range (HDR)? What s the difference? Since we normally work in LDR Why
Dynamic Range H. David Stein Dynamic Range What is dynamic range? What is low or limited dynamic range (LDR)? What is high dynamic range (HDR)? What s the difference? Since we normally work in LDR Why
How does prism technology help to achieve superior color image quality?
 WHITE PAPER How does prism technology help to achieve superior color image quality? Achieving superior image quality requires real and full color depth for every channel, improved color contrast and color
WHITE PAPER How does prism technology help to achieve superior color image quality? Achieving superior image quality requires real and full color depth for every channel, improved color contrast and color
Visibility of Uncorrelated Image Noise
 Visibility of Uncorrelated Image Noise Jiajing Xu a, Reno Bowen b, Jing Wang c, and Joyce Farrell a a Dept. of Electrical Engineering, Stanford University, Stanford, CA. 94305 U.S.A. b Dept. of Psychology,
Visibility of Uncorrelated Image Noise Jiajing Xu a, Reno Bowen b, Jing Wang c, and Joyce Farrell a a Dept. of Electrical Engineering, Stanford University, Stanford, CA. 94305 U.S.A. b Dept. of Psychology,
Cameras CS / ECE 181B
 Cameras CS / ECE 181B Image Formation Geometry of image formation (Camera models and calibration) Where? Radiometry of image formation How bright? What color? Examples of cameras What is a Camera? A camera
Cameras CS / ECE 181B Image Formation Geometry of image formation (Camera models and calibration) Where? Radiometry of image formation How bright? What color? Examples of cameras What is a Camera? A camera
Cvision 2. António J. R. Neves João Paulo Silva Cunha. Bernardo Cunha. IEETA / Universidade de Aveiro
 Cvision 2 Digital Imaging António J. R. Neves (an@ua.pt) & João Paulo Silva Cunha & Bernardo Cunha IEETA / Universidade de Aveiro Outline Image sensors Camera calibration Sampling and quantization Data
Cvision 2 Digital Imaging António J. R. Neves (an@ua.pt) & João Paulo Silva Cunha & Bernardo Cunha IEETA / Universidade de Aveiro Outline Image sensors Camera calibration Sampling and quantization Data
Realistic Image Synthesis
 Realistic Image Synthesis - HDR Capture & Tone Mapping - Philipp Slusallek Karol Myszkowski Gurprit Singh Karol Myszkowski LDR vs HDR Comparison Various Dynamic Ranges (1) 10-6 10-4 10-2 100 102 104 106
Realistic Image Synthesis - HDR Capture & Tone Mapping - Philipp Slusallek Karol Myszkowski Gurprit Singh Karol Myszkowski LDR vs HDR Comparison Various Dynamic Ranges (1) 10-6 10-4 10-2 100 102 104 106
Introduction to Digital Photography
 Introduction to Digital Photography A CAMERA IS A LIGHT TIGHT BOX All contemporary cameras have the same basic features A light-tight box to hold the camera parts and recording material A viewing system
Introduction to Digital Photography A CAMERA IS A LIGHT TIGHT BOX All contemporary cameras have the same basic features A light-tight box to hold the camera parts and recording material A viewing system
Computational Sensors
 Computational Sensors Suren Jayasuriya Postdoctoral Fellow, The Robotics Institute, Carnegie Mellon University Class Announcements 1) Vote on this poll about project checkpoint date on Piazza: https://piazza.com/class/j6dobp76al46ao?cid=126
Computational Sensors Suren Jayasuriya Postdoctoral Fellow, The Robotics Institute, Carnegie Mellon University Class Announcements 1) Vote on this poll about project checkpoint date on Piazza: https://piazza.com/class/j6dobp76al46ao?cid=126
Prof. Feng Liu. Winter /09/2017
 Prof. Feng Liu Winter 2017 http://www.cs.pdx.edu/~fliu/courses/cs410/ 01/09/2017 Today Course overview Computer vision Admin. Info Visual Computing at PSU Image representation Color 2 Big Picture: Visual
Prof. Feng Liu Winter 2017 http://www.cs.pdx.edu/~fliu/courses/cs410/ 01/09/2017 Today Course overview Computer vision Admin. Info Visual Computing at PSU Image representation Color 2 Big Picture: Visual
A CAMERA IS A LIGHT TIGHT BOX
 HOW CAMERAS WORK A CAMERA IS A LIGHT TIGHT BOX Pinhole Principle All contemporary cameras have the same basic features A light-tight box to hold the camera parts and recording material A viewing system
HOW CAMERAS WORK A CAMERA IS A LIGHT TIGHT BOX Pinhole Principle All contemporary cameras have the same basic features A light-tight box to hold the camera parts and recording material A viewing system
COLOR FILTER PATTERNS
 Sparse Color Filter Pattern Overview Overview The Sparse Color Filter Pattern (or Sparse CFA) is a four-channel alternative for obtaining full-color images from a single image sensor. By adding panchromatic
Sparse Color Filter Pattern Overview Overview The Sparse Color Filter Pattern (or Sparse CFA) is a four-channel alternative for obtaining full-color images from a single image sensor. By adding panchromatic
IDENTIFYING DIGITAL CAMERAS USING CFA INTERPOLATION
 Chapter 23 IDENTIFYING DIGITAL CAMERAS USING CFA INTERPOLATION Sevinc Bayram, Husrev Sencar and Nasir Memon Abstract In an earlier work [4], we proposed a technique for identifying digital camera models
Chapter 23 IDENTIFYING DIGITAL CAMERAS USING CFA INTERPOLATION Sevinc Bayram, Husrev Sencar and Nasir Memon Abstract In an earlier work [4], we proposed a technique for identifying digital camera models
High Dynamic Range Imaging
 High Dynamic Range Imaging 1 2 Lecture Topic Discuss the limits of the dynamic range in current imaging and display technology Solutions 1. High Dynamic Range (HDR) Imaging Able to image a larger dynamic
High Dynamic Range Imaging 1 2 Lecture Topic Discuss the limits of the dynamic range in current imaging and display technology Solutions 1. High Dynamic Range (HDR) Imaging Able to image a larger dynamic
Capturing Light in man and machine. Some figures from Steve Seitz, Steve Palmer, Paul Debevec, and Gonzalez et al.
 Capturing Light in man and machine Some figures from Steve Seitz, Steve Palmer, Paul Debevec, and Gonzalez et al. 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Image Formation Digital
Capturing Light in man and machine Some figures from Steve Seitz, Steve Palmer, Paul Debevec, and Gonzalez et al. 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Image Formation Digital
F-number sequence. a change of f-number to the next in the sequence corresponds to a factor of 2 change in light intensity,
 1 F-number sequence a change of f-number to the next in the sequence corresponds to a factor of 2 change in light intensity, 0.7, 1, 1.4, 2, 2.8, 4, 5.6, 8, 11, 16, 22, 32, Example: What is the difference
1 F-number sequence a change of f-number to the next in the sequence corresponds to a factor of 2 change in light intensity, 0.7, 1, 1.4, 2, 2.8, 4, 5.6, 8, 11, 16, 22, 32, Example: What is the difference
Advanced Camera and Image Sensor Technology. Steve Kinney Imaging Professional Camera Link Chairman
 Advanced Camera and Image Sensor Technology Steve Kinney Imaging Professional Camera Link Chairman Content Physical model of a camera Definition of various parameters for EMVA1288 EMVA1288 and image quality
Advanced Camera and Image Sensor Technology Steve Kinney Imaging Professional Camera Link Chairman Content Physical model of a camera Definition of various parameters for EMVA1288 EMVA1288 and image quality
Acquisition. Some slides from: Yung-Yu Chuang (DigiVfx) Jan Neumann, Pat Hanrahan, Alexei Efros
 Jan Neumann, Pat Hanrahan, Alexei Efros") Acquisition Some slides from: Yung-Yu Chuang (DigiVfx) Jan Neumann, Pat Hanrahan, Alexei Efros Image Acquisition Digital Camera Film Outline Pinhole camera Lens Lens aberrations Exposure Sensors Noise
Acquisition Some slides from: Yung-Yu Chuang (DigiVfx) Jan Neumann, Pat Hanrahan, Alexei Efros Image Acquisition Digital Camera Film Outline Pinhole camera Lens Lens aberrations Exposure Sensors Noise
Processing Time Lapse Astro Images with RawTherapee
 Processing Time Lapse Astro Images with RawTherapee Axel Mellinger Department of Physics Central Michigan University & Sunset Astronomical Society June 10, 2016 Axel Mellinger (Physics, CMU) Time Lapse
Processing Time Lapse Astro Images with RawTherapee Axel Mellinger Department of Physics Central Michigan University & Sunset Astronomical Society June 10, 2016 Axel Mellinger (Physics, CMU) Time Lapse
Zone. ystem. Handbook. Part 2 The Zone System in Practice. by Jeff Curto
 A Zone S ystem Handbook Part 2 The Zone System in Practice by This handout was produced in support of s Camera Position Podcast. Reproduction and redistribution of this document is fine, so long as the
A Zone S ystem Handbook Part 2 The Zone System in Practice by This handout was produced in support of s Camera Position Podcast. Reproduction and redistribution of this document is fine, so long as the
Cameras. Shrinking the aperture. Camera trial #1. Pinhole camera. Digital Visual Effects Yung-Yu Chuang. Put a piece of film in front of an object.
 Camera trial #1 Cameras Digital Visual Effects Yung-Yu Chuang scene film with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros Put a piece of film in front of an object. Pinhole camera
Camera trial #1 Cameras Digital Visual Effects Yung-Yu Chuang scene film with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros Put a piece of film in front of an object. Pinhole camera
The Noise about Noise
 The Noise about Noise I have found that few topics in astrophotography cause as much confusion as noise and proper exposure. In this column I will attempt to present some of the theory that goes into determining
The Noise about Noise I have found that few topics in astrophotography cause as much confusion as noise and proper exposure. In this column I will attempt to present some of the theory that goes into determining
ECC419 IMAGE PROCESSING
 ECC419 IMAGE PROCESSING INTRODUCTION Image Processing Image processing is a subclass of signal processing concerned specifically with pictures. Digital Image Processing, process digital images by means
ECC419 IMAGE PROCESSING INTRODUCTION Image Processing Image processing is a subclass of signal processing concerned specifically with pictures. Digital Image Processing, process digital images by means
VU Rendering SS Unit 8: Tone Reproduction
 VU Rendering SS 2012 Unit 8: Tone Reproduction Overview 1. The Problem Image Synthesis Pipeline Different Image Types Human visual system Tone mapping Chromatic Adaptation 2. Tone Reproduction Linear methods
VU Rendering SS 2012 Unit 8: Tone Reproduction Overview 1. The Problem Image Synthesis Pipeline Different Image Types Human visual system Tone mapping Chromatic Adaptation 2. Tone Reproduction Linear methods
Introduction to Video Forgery Detection: Part I
 Introduction to Video Forgery Detection: Part I Detecting Forgery From Static-Scene Video Based on Inconsistency in Noise Level Functions IEEE TRANSACTIONS ON INFORMATION FORENSICS AND SECURITY, VOL. 5,
Introduction to Video Forgery Detection: Part I Detecting Forgery From Static-Scene Video Based on Inconsistency in Noise Level Functions IEEE TRANSACTIONS ON INFORMATION FORENSICS AND SECURITY, VOL. 5,
Lecture 2: Digital Image Fundamentals -- Sampling & Quantization
 I2200: Digital Image processing Lecture 2: Digital Image Fundamentals -- Sampling & Quantization Prof. YingLi Tian Sept. 6, 2017 Department of Electrical Engineering The City College of New York The City
I2200: Digital Image processing Lecture 2: Digital Image Fundamentals -- Sampling & Quantization Prof. YingLi Tian Sept. 6, 2017 Department of Electrical Engineering The City College of New York The City
Overview. Charge-coupled Devices. MOS capacitor. Charge-coupled devices. Charge-coupled devices:
 Overview Charge-coupled Devices Charge-coupled devices: MOS capacitors Charge transfer Architectures Color Limitations 1 2 Charge-coupled devices MOS capacitor The most popular image recording technology
Overview Charge-coupled Devices Charge-coupled devices: MOS capacitors Charge transfer Architectures Color Limitations 1 2 Charge-coupled devices MOS capacitor The most popular image recording technology
Color Science. What light is. Measuring light. CS 4620 Lecture 15. Salient property is the spectral power distribution (SPD)
") Color Science CS 4620 Lecture 15 1 2 What light is Measuring light Light is electromagnetic radiation Salient property is the spectral power distribution (SPD) [Lawrence Berkeley Lab / MicroWorlds] exists
Color Science CS 4620 Lecture 15 1 2 What light is Measuring light Light is electromagnetic radiation Salient property is the spectral power distribution (SPD) [Lawrence Berkeley Lab / MicroWorlds] exists
ME 6406 MACHINE VISION. Georgia Institute of Technology
 ME 6406 MACHINE VISION Georgia Institute of Technology Class Information Instructor Professor Kok-Meng Lee MARC 474 Office hours: Tues/Thurs 1:00-2:00 pm kokmeng.lee@me.gatech.edu (404)-894-7402 Class
ME 6406 MACHINE VISION Georgia Institute of Technology Class Information Instructor Professor Kok-Meng Lee MARC 474 Office hours: Tues/Thurs 1:00-2:00 pm kokmeng.lee@me.gatech.edu (404)-894-7402 Class
Digital Imaging Alliance
 Digital Imaging Alliance 1 2 Camera Calibration & Profiling Little Things Matter! Minor improvements can contribute! toward our quest for perfection! 3 Camera Calibration & Profiling What"s the problem?!
Digital Imaging Alliance 1 2 Camera Calibration & Profiling Little Things Matter! Minor improvements can contribute! toward our quest for perfection! 3 Camera Calibration & Profiling What"s the problem?!
Introduction to Image Processing and Computer Vision -- Noise, Dynamic Range and Color --
 Introduction to Image Processing and Computer Vision -- Noise, Dynamic Range and Color -- Winter 2013 Ivo Ihrke Organizational Issues I received your email addresses Course announcements will be send via
Introduction to Image Processing and Computer Vision -- Noise, Dynamic Range and Color -- Winter 2013 Ivo Ihrke Organizational Issues I received your email addresses Course announcements will be send via
The Raw Deal Raw VS. JPG
 The Raw Deal Raw VS. JPG Photo Plus Expo New York City, October 31st, 2003. 2003 By Jeff Schewe Notes at: www.schewephoto.com/workshop The Raw Deal How a CCD Works The Chip The Raw Deal How a CCD Works
The Raw Deal Raw VS. JPG Photo Plus Expo New York City, October 31st, 2003. 2003 By Jeff Schewe Notes at: www.schewephoto.com/workshop The Raw Deal How a CCD Works The Chip The Raw Deal How a CCD Works
Digital camera. Sensor. Memory card. Circuit board
 Digital camera Circuit board Memory card Sensor Detector element (pixel). Typical size: 2-5 m square Typical number: 5-20M Pixel = Photogate Photon + Thin film electrode (semi-transparent) Depletion volume
Digital camera Circuit board Memory card Sensor Detector element (pixel). Typical size: 2-5 m square Typical number: 5-20M Pixel = Photogate Photon + Thin film electrode (semi-transparent) Depletion volume
Cameras. Outline. Pinhole camera. Camera trial #1. Pinhole camera Film camera Digital camera Video camera High dynamic range imaging
 Outline Cameras Pinhole camera Film camera Digital camera Video camera High dynamic range imaging Digital Visual Effects, Spring 2006 Yung-Yu Chuang 2006/3/1 with slides by Fedro Durand, Brian Curless,
Outline Cameras Pinhole camera Film camera Digital camera Video camera High dynamic range imaging Digital Visual Effects, Spring 2006 Yung-Yu Chuang 2006/3/1 with slides by Fedro Durand, Brian Curless,
Fundamentals of CMOS Image Sensors
 CHAPTER 2 Fundamentals of CMOS Image Sensors Mixed-Signal IC Design for Image Sensor 2-1 Outline Photoelectric Effect Photodetectors CMOS Image Sensor(CIS) Array Architecture CIS Peripherals Design Considerations
CHAPTER 2 Fundamentals of CMOS Image Sensors Mixed-Signal IC Design for Image Sensor 2-1 Outline Photoelectric Effect Photodetectors CMOS Image Sensor(CIS) Array Architecture CIS Peripherals Design Considerations
Learning the image processing pipeline
 Learning the image processing pipeline Brian A. Wandell Stanford Neurosciences Institute Psychology Stanford University http://www.stanford.edu/~wandell S. Lansel Andy Lin Q. Tian H. Blasinski H. Jiang
Learning the image processing pipeline Brian A. Wandell Stanford Neurosciences Institute Psychology Stanford University http://www.stanford.edu/~wandell S. Lansel Andy Lin Q. Tian H. Blasinski H. Jiang
Image Sensor Characterization in a Photographic Context
 Image Sensor Characterization in a Photographic Context Sean C. Kelly, Gloria G. Putnam, Richard B. Wheeler, Shen Wang, William Davis, Ed Nelson, and Doug Carpenter Eastman Kodak Company Rochester, New
Image Sensor Characterization in a Photographic Context Sean C. Kelly, Gloria G. Putnam, Richard B. Wheeler, Shen Wang, William Davis, Ed Nelson, and Doug Carpenter Eastman Kodak Company Rochester, New
Acquisition Basics. How can we measure material properties? Goal of this Section. Special Purpose Tools. General Purpose Tools
 Course 10 Realistic Materials in Computer Graphics Acquisition Basics MPI Informatik (moving to the University of Washington Goal of this Section practical, hands-on description of acquisition basics general
Course 10 Realistic Materials in Computer Graphics Acquisition Basics MPI Informatik (moving to the University of Washington Goal of this Section practical, hands-on description of acquisition basics general
Charged Coupled Device (CCD) S.Vidhya
 S.Vidhya") Charged Coupled Device (CCD) S.Vidhya 02.04.2016 Sensor Physical phenomenon Sensor Measurement Output A sensor is a device that measures a physical quantity and converts it into a signal which can be read
Charged Coupled Device (CCD) S.Vidhya 02.04.2016 Sensor Physical phenomenon Sensor Measurement Output A sensor is a device that measures a physical quantity and converts it into a signal which can be read
Digital Imaging Rochester Institute of Technology
 Digital Imaging 1999 Rochester Institute of Technology So Far... camera AgX film processing image AgX photographic film captures image formed by the optical elements (lens). Unfortunately, the processing
Digital Imaging 1999 Rochester Institute of Technology So Far... camera AgX film processing image AgX photographic film captures image formed by the optical elements (lens). Unfortunately, the processing
Digital Photographs and Matrices
 Digital Photographs and Matrices Digital Camera Image Sensors Electron Counts Checkerboard Analogy Bryce Bayer s Color Filter Array Mosaic. Image Sensor Data to Matrix Data Visualization of Matrix Addition
Digital Photographs and Matrices Digital Camera Image Sensors Electron Counts Checkerboard Analogy Bryce Bayer s Color Filter Array Mosaic. Image Sensor Data to Matrix Data Visualization of Matrix Addition
High Dynamic Range Images
 High Dynamic Range Images TNM078 Image Based Rendering Jonas Unger 2004, V1.2 1 Introduction When examining the world around us, it becomes apparent that the lighting conditions in many scenes cover a
High Dynamic Range Images TNM078 Image Based Rendering Jonas Unger 2004, V1.2 1 Introduction When examining the world around us, it becomes apparent that the lighting conditions in many scenes cover a
Capturing Light in man and machine
 Capturing Light in man and machine CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2015 Etymology PHOTOGRAPHY light drawing / writing Image Formation Digital Camera
Capturing Light in man and machine CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2015 Etymology PHOTOGRAPHY light drawing / writing Image Formation Digital Camera
Capturing Light in man and machine
 Capturing Light in man and machine CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2016 Textbook http://szeliski.org/book/ General Comments Prerequisites Linear algebra!!!
Capturing Light in man and machine CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2016 Textbook http://szeliski.org/book/ General Comments Prerequisites Linear algebra!!!
Goal of this Section. Capturing Reflectance From Theory to Practice. Acquisition Basics. How can we measure material properties? Special Purpose Tools
 Capturing Reflectance From Theory to Practice Acquisition Basics GRIS, TU Darmstadt (formerly University of Washington, Seattle Goal of this Section practical, hands-on description of acquisition basics
Capturing Reflectance From Theory to Practice Acquisition Basics GRIS, TU Darmstadt (formerly University of Washington, Seattle Goal of this Section practical, hands-on description of acquisition basics
2013 LMIC Imaging Workshop. Sidney L. Shaw Technical Director. - Light and the Image - Detectors - Signal and Noise
 2013 LMIC Imaging Workshop Sidney L. Shaw Technical Director - Light and the Image - Detectors - Signal and Noise The Anatomy of a Digital Image Representative Intensities Specimen: (molecular distribution)
2013 LMIC Imaging Workshop Sidney L. Shaw Technical Director - Light and the Image - Detectors - Signal and Noise The Anatomy of a Digital Image Representative Intensities Specimen: (molecular distribution)
Setting Up Your Camera Overview
 Setting Up Your Camera Overview Lecture #1B LOUDEN 1 Digital Shooting: Setting up your Camera & Taking Photographs Watch this Video: Getting to Know Some Controls on Your Camera (DSLR CAMERAS): http://www.youtube.com/watch?v=1wu63fbg27o&feature=rel
Setting Up Your Camera Overview Lecture #1B LOUDEN 1 Digital Shooting: Setting up your Camera & Taking Photographs Watch this Video: Getting to Know Some Controls on Your Camera (DSLR CAMERAS): http://www.youtube.com/watch?v=1wu63fbg27o&feature=rel
Images. CS 4620 Lecture Kavita Bala w/ prior instructor Steve Marschner. Cornell CS4620 Fall 2015 Lecture 38
 Images CS 4620 Lecture 38 w/ prior instructor Steve Marschner 1 Announcements A7 extended by 24 hours w/ prior instructor Steve Marschner 2 Color displays Operating principle: humans are trichromatic match
Images CS 4620 Lecture 38 w/ prior instructor Steve Marschner 1 Announcements A7 extended by 24 hours w/ prior instructor Steve Marschner 2 Color displays Operating principle: humans are trichromatic match
Capturing Light in man and machine
 Capturing Light in man and machine CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2014 Etymology PHOTOGRAPHY light drawing / writing Image Formation Digital Camera
Capturing Light in man and machine CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2014 Etymology PHOTOGRAPHY light drawing / writing Image Formation Digital Camera
brief history of photography foveon X3 imager technology description
 brief history of photography foveon X3 imager technology description imaging technology 30,000 BC chauvet-pont-d arc pinhole camera principle first described by Aristotle fourth century B.C. oldest known
brief history of photography foveon X3 imager technology description imaging technology 30,000 BC chauvet-pont-d arc pinhole camera principle first described by Aristotle fourth century B.C. oldest known
Introduction to Color Science (Cont)
") Lecture 24: Introduction to Color Science (Cont) Computer Graphics and Imaging UC Berkeley Empirical Color Matching Experiment Additive Color Matching Experiment Show test light spectrum on left Mix primaries
Lecture 24: Introduction to Color Science (Cont) Computer Graphics and Imaging UC Berkeley Empirical Color Matching Experiment Additive Color Matching Experiment Show test light spectrum on left Mix primaries
Color image Demosaicing. CS 663, Ajit Rajwade
 Color image Demosaicing CS 663, Ajit Rajwade Color Filter Arrays It is an array of tiny color filters placed before the image sensor array of a camera. The resolution of this array is the same as that
Color image Demosaicing CS 663, Ajit Rajwade Color Filter Arrays It is an array of tiny color filters placed before the image sensor array of a camera. The resolution of this array is the same as that
PIXPOLAR WHITE PAPER 29 th of September 2013
 PIXPOLAR WHITE PAPER 29 th of September 2013 Pixpolar s Modified Internal Gate (MIG) image sensor technology offers numerous benefits over traditional Charge Coupled Device (CCD) and Complementary Metal
PIXPOLAR WHITE PAPER 29 th of September 2013 Pixpolar s Modified Internal Gate (MIG) image sensor technology offers numerous benefits over traditional Charge Coupled Device (CCD) and Complementary Metal
COMPUTATIONAL PHOTOGRAPHY. Chapter 10
 1 COMPUTATIONAL PHOTOGRAPHY Chapter 10 Computa;onal photography Computa;onal photography: image analysis and processing algorithms are applied to one or more photographs to create images that go beyond
1 COMPUTATIONAL PHOTOGRAPHY Chapter 10 Computa;onal photography Computa;onal photography: image analysis and processing algorithms are applied to one or more photographs to create images that go beyond
CS 89.15/189.5, Fall 2015 ASPECTS OF DIGITAL PHOTOGRAPHY COMPUTATIONAL. Sensors & Demosaicing. Wojciech Jarosz
 CS 89.15/189.5, Fall 2015 COMPUTATIONAL ASPECTS OF DIGITAL PHOTOGRAPHY Sensors & Demosaicing Wojciech Jarosz wojciech.k.jarosz@dartmouth.edu Today s agenda How do cameras record light? How do cameras record
CS 89.15/189.5, Fall 2015 COMPUTATIONAL ASPECTS OF DIGITAL PHOTOGRAPHY Sensors & Demosaicing Wojciech Jarosz wojciech.k.jarosz@dartmouth.edu Today s agenda How do cameras record light? How do cameras record
ULS24 Frequently Asked Questions
 List of Questions 1 1. What type of lens and filters are recommended for ULS24, where can we source these components?... 3 2. Are filters needed for fluorescence and chemiluminescence imaging, what types
List of Questions 1 1. What type of lens and filters are recommended for ULS24, where can we source these components?... 3 2. Are filters needed for fluorescence and chemiluminescence imaging, what types
Unit 1: Image Formation
 Unit 1: Image Formation 1. Geometry 2. Optics 3. Photometry 4. Sensor Readings Szeliski 2.1-2.3 & 6.3.5 1 Physical parameters of image formation Geometric Type of projection Camera pose Optical Sensor
Unit 1: Image Formation 1. Geometry 2. Optics 3. Photometry 4. Sensor Readings Szeliski 2.1-2.3 & 6.3.5 1 Physical parameters of image formation Geometric Type of projection Camera pose Optical Sensor
12/02/2017. From light to colour spaces. Electromagnetic spectrum. Colour. Correlated colour temperature. Black body radiation.
 From light to colour spaces Light and colour Advanced Graphics Rafal Mantiuk Computer Laboratory, University of Cambridge 1 2 Electromagnetic spectrum Visible light Electromagnetic waves of wavelength
From light to colour spaces Light and colour Advanced Graphics Rafal Mantiuk Computer Laboratory, University of Cambridge 1 2 Electromagnetic spectrum Visible light Electromagnetic waves of wavelength
Last class. This class. CCDs Fancy CCDs. Camera specs scmos
 CCDs and scmos Last class CCDs Fancy CCDs This class Camera specs scmos Fancy CCD cameras: -Back thinned -> higher QE -Unexposed chip -> frame transfer -Electron multiplying -> higher SNR -Fancy ADC ->
CCDs and scmos Last class CCDs Fancy CCDs This class Camera specs scmos Fancy CCD cameras: -Back thinned -> higher QE -Unexposed chip -> frame transfer -Electron multiplying -> higher SNR -Fancy ADC ->
PROCESSING X-TRANS IMAGES IN IRIDIENT DEVELOPER SAMPLE
 PROCESSING X-TRANS IMAGES IN IRIDIENT DEVELOPER!2 Introduction 5 X-Trans files, demosaicing and RAW conversion Why use one converter over another? Advantages of Iridient Developer for X-Trans Processing
PROCESSING X-TRANS IMAGES IN IRIDIENT DEVELOPER!2 Introduction 5 X-Trans files, demosaicing and RAW conversion Why use one converter over another? Advantages of Iridient Developer for X-Trans Processing
It should also be noted that with modern cameras users can choose for either
 White paper about color correction More drama Many application fields like digital printing industry or the human medicine require a natural display of colors. To illustrate the importance of color fidelity,
White paper about color correction More drama Many application fields like digital printing industry or the human medicine require a natural display of colors. To illustrate the importance of color fidelity,
Color and perception Christian Miller CS Fall 2011
 Color and perception Christian Miller CS 354 - Fall 2011 A slight detour We ve spent the whole class talking about how to put images on the screen What happens when we look at those images? Are there any
Color and perception Christian Miller CS 354 - Fall 2011 A slight detour We ve spent the whole class talking about how to put images on the screen What happens when we look at those images? Are there any
Camera Requirements For Precision Agriculture
 Camera Requirements For Precision Agriculture Radiometric analysis such as NDVI requires careful acquisition and handling of the imagery to provide reliable values. In this guide, we explain how Pix4Dmapper
Camera Requirements For Precision Agriculture Radiometric analysis such as NDVI requires careful acquisition and handling of the imagery to provide reliable values. In this guide, we explain how Pix4Dmapper
Aperture. The lens opening that allows more, or less light onto the sensor formed by a diaphragm inside the actual lens.
 PHOTOGRAPHY TERMS: AE - Auto Exposure. When the camera is set to this mode, it will automatically set all the required modes for the light conditions. I.e. Shutter speed, aperture and white balance. The
PHOTOGRAPHY TERMS: AE - Auto Exposure. When the camera is set to this mode, it will automatically set all the required modes for the light conditions. I.e. Shutter speed, aperture and white balance. The
Properties of a Detector
 Properties of a Detector Quantum Efficiency fraction of photons detected wavelength and spatially dependent Dynamic Range difference between lowest and highest measurable flux Linearity detection rate
Properties of a Detector Quantum Efficiency fraction of photons detected wavelength and spatially dependent Dynamic Range difference between lowest and highest measurable flux Linearity detection rate