Touch and tactile perception for robots
|
|
|
- Alan Herbert Booth
- 5 years ago
- Views:
Transcription
1 Touch and tactile perception for robots Václav Hlaváč Czech Technical University in Prague (ČVUT) Czech Institute of Informatics, Robotics, and Cybernetics (CIIRC) Prague 6, Jugoslávských partyzánů 1580/3 Czech Republic 1


2 Human sense of touch 2
3 Related human vocabulary Tactile Perceptible to the sense of touch. From Latin tactilis ( that may be touched, tangible ). From French tactile. Touch Make physical contact with. From e.g. French toucher. Source: Wiktionary Haptic Of or relating to the sense of touch; tactile. From Ancient Greek ἁπτικός (haptikos, able to come in contact with ), ἅπτω (haptō, I touch ). Haptics (in medicine) The study of the sense of touch. (in computing) The study of user interfaces that use the sense of touch. 3


4 A greater picture, a somatosensory system 4
5 Somatosensory system The touch impression uses several modalities. Somatosensory system comprising the receptors and processing centers to perceive touch, temperature, proprioception (body position from stimuli inside the body), and nociception (pain). Cutaneous sensations obtains inputs from the receptors embedded in the skin (examples: temperature, pressure, pain). Kinesthetic sensations gets inputs from the receptors within muscles, tendons and joints (examples: body position, movement, weight, equilibrium). 5

6 Towards robot tactile sensors Receptors in humans cover the skin and epithelia, skeletal muscles, bones and joints, internal organs, and the cardiovascular system. Tactile sensors in robotics cutaneous sensory receptors in humans. 6

7 Human sensory physiology Stimulus Receptors Afferent pathway CNS integration Internal External Energy source Sense organs Transducers 7

8 External stimuli, special senses 8
.")
9 Neurophysiological view Somatosensory system comprises of 3 parts: Exteroceptive cutaneous system. Proprioception system (monitors body position). Interoceptive system (monitors conditions within the body as blood pressure). Cortical homunuculus Visualization of the point-to-point mapping between body surfaces (and function) to the brain surface. 9

10 Somatosensory map 10

11 Sensory modality 11

12 Various receptors in the skin 12
13 Human touch signals FAI; Meissner corpuscules; Fast Adapting type I; Respond to skin deformation only. SAI; Merkel disc; Slow Adapting type I; dynamically sensitive and exhibit a response linked to the strength of maintained skin deformation. FAII; Pacini corpuscules; Fast Adapting type I; Respond to changes in skin deformation and vibrations. SAII; Ruffini receptors; Slow Adapting type II; Dynamically sensitive and exhibit a response linked to the strength of maintained skin deformation. 13
14 Touch reception in animals Touch reception (called also tangoreception) is a perception in an animal when in contact with a (solid) object. Two types of receptors are common: Tactile hairs (in many animals from worms, birds to mammals). Some can be very specialized as, e.g., cat whiskers. Subcutaneous receptors, which lie in the skin. 14


15 Whiskers In the nature: comparable to finger tips motion detection of distant objects navigation in the dark rich shape and texture information neural processing model system for somatosensory processing In robotics, so far: limited (binary, strain sensors, bending angles) 15
16 Tactile sensing vs. haptics in robotics and/or computing Tactile sensing What is sensed? Deformation of bodies (strain). Through deformation measure change of parameters, and find: Static texture, local compliance, or local shape. Force (normal and/or shear) (indirect). Pressure. Slippage. Haptics Haptics explores human touch sense as a channel. The counterforce and its dynamics stimulates touch, compliance, vibrations, etc. 1 khz loop needed. Two main devices: Force feedback devices. Haptic displays and rendering algorithms. 16
17 Haptics, ideas Haptics provides a human an additional communication channel to sight and sound in (computer) applications. Traditionally, the bidirectional communication is often secured by a keyboard and a mouse only. Haptics expands the bidirectional communication by providing sensory feedback that simulates physical properties and force. Machine part of the haptic interface exerts forces to simulate contact with a virtual object. 17




18 Haptic devices Virtual reality / telerobotics: Exoskeletons. Gloves. Feedback devices: Force feedback devices. Tactile display devices. 18
19 Haptics has many applications Blind Persons Programmable Braille Access to GUIs Training Medical Procedures Astronauts Education Computer-Aided Design Assembly-Disassembly Human Factors Art / Animation / Modeling Entertainment Arcade (steering wheels) Home (game controllers) Automotive BMW idrive Haptic Touchscreens Mobile Phones Immersion Vibetonz Material Handling Virtual Surfaces 19





20 Pneumatic / magnetic tactile display The inverse problem: When the collected data is to be presented directly to human as touch, force feedback UC Berkeley s tactile display: 5 x 5 array of pneumatic pins 0.3 N per element, 3 db point of 8 Hz, and 3 bits of force resolution 20



21 Piezoelectric display for the blind Display with 256 tactile dots on an area of 4 x 4 cm. Displays characters instead of Braille cells. Piezoelectric actuators. e_/home e_.html 21



22 Principles of tactile sensors Mechanical micro switch. Resistive elastomer or foam. Capacitive. Magnetic (Hall effect). Piezoresistive, etc. Tactile element (tactel) A grid of tactels 22




23 Mechanical sensor One-directional reed switch Omni-directional reed switch Roller contact switch Strain gauge (tensometer) Etc. 23

 Application in a")
24 Strain gauge tactile sensor Measures also the shear force FF ττ. Double Octagon Tactile Sensor (DOTS) Application in a gripper 24
25 Resistive sensor The basic principle is the measurement of the resistance of a conductive elastomer or foam between two points. The majority of the sensors use an elastomer that consists of a carbon doped rubber. 25
26 Disadvantages, resistive sensors An elastomer has a long nonlinear time constant, different for applying and releasing force. Highly nonlinear transfer function. Cyclic application of forces causes resistive medium migration within the elastomer in time. If the elastomer becomes permanently deformed then a fatigue leading to sensor malfunction. This will give the sensor a poor long-term stability and will require its replacement after an extended period of use. 26



27 Common package and pricing Price ranges from a few dollars to a few tens of dollars. 27


28 Force-Sensitive-Resistor sensor FSR = Force-Sensitive-Resistor Used also for touch keyboards. 28

29 Resistive touchscreen Two flexible resistive layers are separated by a grid of spacers. When the two layers are pressed together the resistance can be measured between several points. This determines where the two resistive layers contacted. 29
30 Capacitive force sensor (1) Capacitance between two parallel plates CC = εε AA dd, where εε is the permittivity of the dielectric medium, AA is the plate area, dd is the distance between plates, The elastomer gives force-to-capacitance characteristic. 30

31 Capacitive force sensor (2) As the size is reduced to increase the spatial resolution, the sensor s absolute capacitance will decrease. To maximize the change in capacitance as force is applied, it is preferable to use a high permittivity, dielectric in a coaxial capacitor design. The use of a highly dielectric polymer such as poly vinylidene fluoride maximizes the change capacitance. 31

32 Capacitive touchscreen A conductive layer is covered with a dielectric layer. The finger = the other plate of the capacitor. A few khz signal is transmitted through the conductive plate, the dielectric, and the finger to ground. The current from each corner is measured to determine the touch location. 32

33 Ultrasound touch panel/screen Ultrasonic sound waves (>40 khz) are transmitted in both the horizontal and vertical directions. When a finger touches the screen, the waves are damped. Receivers on the other side detect, where the sound was damped. Multiple touch locations are possible. 33

34 Piezoelectric sensor Principle: measures voltage created due to polarization under stress. Polymeric materials that exhibit piezoelectric properties such as polyvinylidene fluoride (PVDF) are used. A thin layer of metallization is applied to both sides of the sheet to collect the charge and permit electrical connections to be made. Alternating current applied do lower PVDF layer (green) generates vibrations due to reverse piezoelectric effect. Soft film (pink) transmits vibrations. Force changes the output voltage. 34
 from magnetoelastic material. Under pressure, the inductance change.")
35 Magnetic sensor Two approaches: 1. Movement of as small magnet due to applied force. Magnetic flux change is detected by Hall effect probe or a magnetoresistive probe. 2. Core of a coil (or transformer) from magnetoelastic material. Under pressure, the inductance change. Reminder: Hall effect is the development of a transverse electric field in a solid material when it carries an electric current and is placed in a magnetic field that is perpendicular to the current. 35

36 Optical sensor (1) The transmission or reflection is damped by the deformation due to applied force, which obstructs the light path. Top: deformable tube from elastomer. Bottom: U shaped steel spring. 36
37 Optical sensor (2) A reflective sensors can be constructed with source-receiver fiber pairs embedded in an solid elastomer structure. The amount of light reflected to the receiver is determined by applied force, that changes the thickness of the clear elastomer. 37


38 Skin sensor, magnetic or optical Position of the top of the sensor gives an estimation of the force applied. Magnetic version: magnet on the dome, 4 Hall effect sensors on the base. Optical version: A LED and 4 photo receptors on the base. 38

39 Skin sensor in the gripper 6 tactile sensors on the fingers and thumb. A tactile sensor has 4 domes with 4 hall effect sensors in each dome. Palm: 16 domes, each with 4 hall effect sensors. 39
40 Tactile sensors, a comparison (1) Type Pros Cons Resistive Sensitive; low cost High power consumption; single detect contact point; does not measure a contact force Conductive rubber Mechanically flexible Hysteresis, non-linear response Piezoresistive Low cost; good sensitivity; low noise; simple electronics Stiff and frail; non-linear response; hysteresis; temperature sensitive; signal drift Tunnel effect Sensitive; mechanically flexible; Non-linear response Capacitive Sensitive; low cost; available commercial A/D chips Cross talk; hysteresis; complex electronics 40
41 Tactile sensors, a comparison (2) Type Pros Cons Optical Immune to electromagnetic interference; sensitive; fast; mechanically flexible Bulky; loss of light by microbending; chirping; complex computation; high power consumption Magnetic High sensitivity; good dynamic range; no hysteresis; mechanical robustness; Suffer from magnetic interference; bulky; complex computation; high power consumption Piezoelectric Dynamic response; high bandwidth Temperature sensitive; not so robust electrical connection Ultrasonic Fast dynamic response; good force resolution Temperature sensitive; limited utility at low frequencies; complex electronics 41


42 Two layers sensor 42


43 Shadow hand, a top level model Shadow Dexterous Hand Shadow Robot Company, London, Actuation: Pressurized air muscle or Electric motor driven Hall effect sensors from Syntouch LLC ROS compatible Price USD 100k 43


44 Resistive sensors, Jaromír Volf


45 Resistive sensor PTM 1.3 Jaromír Volf, Faculty of Mechanical Engineering CTU in Prague. Layout 1. Cover layer. 2. Distance insert. 3. Base plate. 4. Electrodes. 5. Conductive elastomer. Tactile sensor PTM


46 Resistive sensor PTM 1.4 Jaromír Volf, Faculty of Mechanical Engineering CTU in Prague. Layout 1. Cover layer. 2. Distance insert. 3. Base plate. 4. Electrodes. 5. Electrode. 6. Conductive elastomer. 46

47 Plantograph V05, J. Volf 47
48 Plantograph, specifications Active area of the sensor 300 x 400 mm Number of sensors Resolution 4 x 4 mm Area of the singe sensor 2 x 2 mm Measured pressure range kpa Allowed permanent overloading 1.4 MPa Impact overloading 10 MPa Frame frequency 300 Hz Line frequency 25 khz Sampling frequency 300 khz Digital output range 256 pressure levels (8 bits) 48
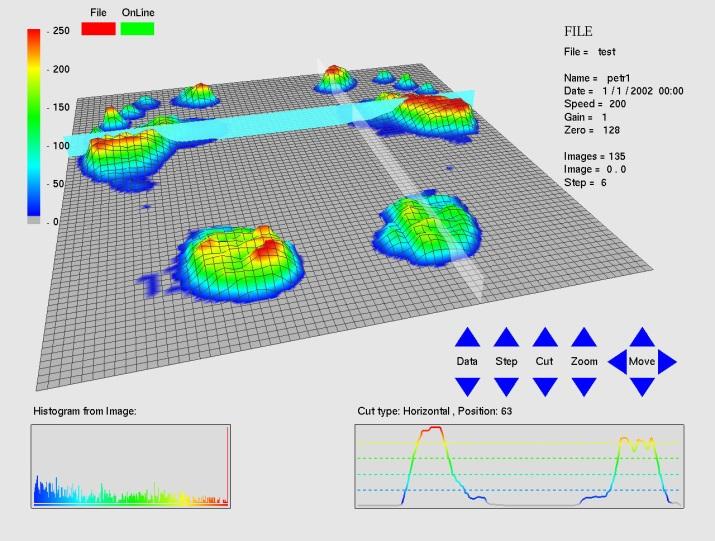




49 Plantograph, results 49


50 Plantograph construction 1 cover layer 2 shear force layer 3 top electrode CUFLEX 4 conductive elastomer CS 57-7 RSC 5 bottom electrode CUFLEX 6 antistatic layer 7 duralumin plate 8 antistatic layer 50
51 Project RadioRoSo, tactile sensor RadioRoSo = Radioactive Waste Robotic Sorting; EC funded project September 2016 to February 2018 Grippers and tactile sensor created at the University of Genova, Matteo Zoppi, Giorgion Cannata, Michal Jilich
52 Tactile sensor hardware 1 Capacitive based transducers Modular and scalable Taxels: ~3.5 mm dia. ~8 mm pitch 48 modules&sheet (467 taxels) 16 bits capacitance to digital converters

53 Tactile sensor hardware 2




54 Tactile sensors integration




55 Tactile sensing applications 10K+ taxels

")

56 Tactile sensing architecture Data communications (sensor to host) Remote programming of embedded electronics (host to sensor)



57 ROS hand module Software has been designed to work in ROS or independently. The ROS interfaces allow to acquire sensor feedback and to send gripper control commands
58 Incorporation of tactile sensors Three blocks of sensitive taxels covering relevant areas of the fingers Palm pad and finger tip pad on the single finger Mid body pads on the paired fingers Enough information to confirm presence and successful grasp of all categories of items Can be used to close a control loop on contact pressure Do not affect grasp schemes and their geometrical foundations





59 Grasp examples



60 Where to buy? Canadian, touch sensitive skins, bankrupt in
61 Conclusions Tactile sensing in robotics have not left research labs yet. Tactile sensing reliability and industrial proliferation is much smaller as compared to, e.g. robot vision. There are prospective teams, ideas, materials, companies (see previous slide), ongoing research projects, which might change the picture soon. 61
Touch and tactile perception for robots
 Touch and tactile perception for robots Václav Hlaváč Czech Technical University () Czech Institute of Informatics, Robotics, and Cybernetics (CIIRC) Prague 6, Zikova 4, Czech Republic hlavac@ciirc.cvut.cz
Touch and tactile perception for robots Václav Hlaváč Czech Technical University () Czech Institute of Informatics, Robotics, and Cybernetics (CIIRC) Prague 6, Zikova 4, Czech Republic hlavac@ciirc.cvut.cz
Haptic Perception & Human Response to Vibrations
 Sensing HAPTICS Manipulation Haptic Perception & Human Response to Vibrations Tactile Kinesthetic (position / force) Outline: 1. Neural Coding of Touch Primitives 2. Functions of Peripheral Receptors B
Sensing HAPTICS Manipulation Haptic Perception & Human Response to Vibrations Tactile Kinesthetic (position / force) Outline: 1. Neural Coding of Touch Primitives 2. Functions of Peripheral Receptors B
Haptic User Interfaces Fall Contents TACTILE SENSING & FEEDBACK. Tactile sensing. Tactile sensing. Mechanoreceptors 2/3. Mechanoreceptors 1/3
 Contents TACTILE SENSING & FEEDBACK Jukka Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere, Finland Tactile
Contents TACTILE SENSING & FEEDBACK Jukka Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere, Finland Tactile
Touch. Touch & the somatic senses. Josh McDermott May 13,
 The different sensory modalities register different kinds of energy from the environment. Touch Josh McDermott May 13, 2004 9.35 The sense of touch registers mechanical energy. Basic idea: we bump into
The different sensory modalities register different kinds of energy from the environment. Touch Josh McDermott May 13, 2004 9.35 The sense of touch registers mechanical energy. Basic idea: we bump into
Lecture 7: Human haptics
 ME 327: Design and Control of Haptic Systems Winter 2018 Lecture 7: Human haptics Allison M. Okamura Stanford University types of haptic sensing kinesthesia/ proprioception/ force cutaneous/ tactile Related
ME 327: Design and Control of Haptic Systems Winter 2018 Lecture 7: Human haptics Allison M. Okamura Stanford University types of haptic sensing kinesthesia/ proprioception/ force cutaneous/ tactile Related
Proprioception & force sensing
 Proprioception & force sensing Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jussi Rantala, Jukka
Proprioception & force sensing Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jussi Rantala, Jukka
Feeding human senses through Immersion
 Virtual Reality Feeding human senses through Immersion 1. How many human senses? 2. Overview of key human senses 3. Sensory stimulation through Immersion 4. Conclusion Th3.1 1. How many human senses? [TRV
Virtual Reality Feeding human senses through Immersion 1. How many human senses? 2. Overview of key human senses 3. Sensory stimulation through Immersion 4. Conclusion Th3.1 1. How many human senses? [TRV
Peter Berkelman. ACHI/DigitalWorld
 Magnetic Levitation Haptic Peter Berkelman ACHI/DigitalWorld February 25, 2013 Outline: Haptics - Force Feedback Sample devices: Phantoms, Novint Falcon, Force Dimension Inertia, friction, hysteresis/backlash
Magnetic Levitation Haptic Peter Berkelman ACHI/DigitalWorld February 25, 2013 Outline: Haptics - Force Feedback Sample devices: Phantoms, Novint Falcon, Force Dimension Inertia, friction, hysteresis/backlash
TACTILE SENSING & FEEDBACK
 TACTILE SENSING & FEEDBACK Jukka Raisamo Multimodal Interaction Research Group Tampere Unit for Computer-Human Interaction Department of Computer Sciences University of Tampere, Finland Contents Tactile
TACTILE SENSING & FEEDBACK Jukka Raisamo Multimodal Interaction Research Group Tampere Unit for Computer-Human Interaction Department of Computer Sciences University of Tampere, Finland Contents Tactile
VIRTUAL FIGURE PRESENTATION USING PRESSURE- SLIPPAGE-GENERATION TACTILE MOUSE
 VIRTUAL FIGURE PRESENTATION USING PRESSURE- SLIPPAGE-GENERATION TACTILE MOUSE Yiru Zhou 1, Xuecheng Yin 1, and Masahiro Ohka 1 1 Graduate School of Information Science, Nagoya University Email: ohka@is.nagoya-u.ac.jp
VIRTUAL FIGURE PRESENTATION USING PRESSURE- SLIPPAGE-GENERATION TACTILE MOUSE Yiru Zhou 1, Xuecheng Yin 1, and Masahiro Ohka 1 1 Graduate School of Information Science, Nagoya University Email: ohka@is.nagoya-u.ac.jp
Haptic Rendering CPSC / Sonny Chan University of Calgary
 Haptic Rendering CPSC 599.86 / 601.86 Sonny Chan University of Calgary Today s Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering
Haptic Rendering CPSC 599.86 / 601.86 Sonny Chan University of Calgary Today s Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering
Haptic Sensing and Perception for Telerobotic Manipulation
 Haptic Sensing and Perception for Telerobotic Manipulation Emil M. Petriu, Dr. Eng., P.Eng., FIEEE Professor School of Information Technology and Engineering University of Ottawa Ottawa, ON., K1N 6N5 Canada
Haptic Sensing and Perception for Telerobotic Manipulation Emil M. Petriu, Dr. Eng., P.Eng., FIEEE Professor School of Information Technology and Engineering University of Ottawa Ottawa, ON., K1N 6N5 Canada
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics
 Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
From Encoding Sound to Encoding Touch
 From Encoding Sound to Encoding Touch Toktam Mahmoodi King s College London, UK http://www.ctr.kcl.ac.uk/toktam/index.htm ETSI STQ Workshop, May 2017 Immersing a person into the real environment with Very
From Encoding Sound to Encoding Touch Toktam Mahmoodi King s College London, UK http://www.ctr.kcl.ac.uk/toktam/index.htm ETSI STQ Workshop, May 2017 Immersing a person into the real environment with Very
CS277 - Experimental Haptics Lecture 2. Haptic Rendering
 CS277 - Experimental Haptics Lecture 2 Haptic Rendering Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering A note on timing...
CS277 - Experimental Haptics Lecture 2 Haptic Rendering Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering A note on timing...
Shape Memory Alloy Actuator Controller Design for Tactile Displays
 34th IEEE Conference on Decision and Control New Orleans, Dec. 3-5, 995 Shape Memory Alloy Actuator Controller Design for Tactile Displays Robert D. Howe, Dimitrios A. Kontarinis, and William J. Peine
34th IEEE Conference on Decision and Control New Orleans, Dec. 3-5, 995 Shape Memory Alloy Actuator Controller Design for Tactile Displays Robert D. Howe, Dimitrios A. Kontarinis, and William J. Peine
COVENANT UNIVERSITY NIGERIA TUTORIAL KIT OMEGA SEMESTER PROGRAMME: MECHANICAL ENGINEERING
 COVENANT UNIVERSITY NIGERIA TUTORIAL KIT OMEGA SEMESTER PROGRAMME: MECHANICAL ENGINEERING COURSE: MCE 527 DISCLAIMER The contents of this document are intended for practice and leaning purposes at the
COVENANT UNIVERSITY NIGERIA TUTORIAL KIT OMEGA SEMESTER PROGRAMME: MECHANICAL ENGINEERING COURSE: MCE 527 DISCLAIMER The contents of this document are intended for practice and leaning purposes at the
Robot Sensors Introduction to Robotics Lecture Handout September 20, H. Harry Asada Massachusetts Institute of Technology
 Robot Sensors 2.12 Introduction to Robotics Lecture Handout September 20, 2004 H. Harry Asada Massachusetts Institute of Technology Touch Sensor CCD Camera Vision System Ultrasonic Sensor Photo removed
Robot Sensors 2.12 Introduction to Robotics Lecture Handout September 20, 2004 H. Harry Asada Massachusetts Institute of Technology Touch Sensor CCD Camera Vision System Ultrasonic Sensor Photo removed
5. Transducers Definition and General Concept of Transducer Classification of Transducers
 5.1. Definition and General Concept of Definition The transducer is a device which converts one form of energy into another form. Examples: Mechanical transducer and Electrical transducer Electrical A
5.1. Definition and General Concept of Definition The transducer is a device which converts one form of energy into another form. Examples: Mechanical transducer and Electrical transducer Electrical A
The 5 Types Of Touch Screen Technology.! Which One Is Best For You?!
 The 5 Types Of Touch Screen Technology. Which One Is Best For You? Touch Screens have become very commonplace in our daily lives: cell phones, ATM s, kiosks, ticket vending machines and more all use touch
The 5 Types Of Touch Screen Technology. Which One Is Best For You? Touch Screens have become very commonplace in our daily lives: cell phones, ATM s, kiosks, ticket vending machines and more all use touch
can easily be integrated with electronics for signal processing, etc. by fabricating
 Glossary Active touch The process where objects are dynamically explored by a finger or hand as in object contour following. Adaptive thresholding A procedure in which a stimulus is interactively increased
Glossary Active touch The process where objects are dynamically explored by a finger or hand as in object contour following. Adaptive thresholding A procedure in which a stimulus is interactively increased
702. Investigation of attraction force and vibration of a slipper in a tactile device with electromagnet
 702. Investigation of attraction force and vibration of a slipper in a tactile device with electromagnet Arūnas Žvironas a, Marius Gudauskis b Kaunas University of Technology, Mechatronics Centre for Research,
702. Investigation of attraction force and vibration of a slipper in a tactile device with electromagnet Arūnas Žvironas a, Marius Gudauskis b Kaunas University of Technology, Mechatronics Centre for Research,
Somatosensory Reception. Somatosensory Reception
 Somatosensory Reception Professor Martha Flanders fland001 @ umn.edu 3-125 Jackson Hall Proprioception, Tactile sensation, (pain and temperature) All mechanoreceptors respond to stretch Classified by adaptation
Somatosensory Reception Professor Martha Flanders fland001 @ umn.edu 3-125 Jackson Hall Proprioception, Tactile sensation, (pain and temperature) All mechanoreceptors respond to stretch Classified by adaptation
Lecture 1: Introduction to haptics and Kinesthetic haptic devices
 ME 327: Design and Control of Haptic Systems Winter 2018 Lecture 1: Introduction to haptics and Kinesthetic haptic devices Allison M. Okamura Stanford University today s objectives introduce you to the
ME 327: Design and Control of Haptic Systems Winter 2018 Lecture 1: Introduction to haptics and Kinesthetic haptic devices Allison M. Okamura Stanford University today s objectives introduce you to the
Touchscreens, tablets and digitizers. RNDr. Róbert Bohdal, PhD.
 Touchscreens, tablets and digitizers RNDr. Róbert Bohdal, PhD. 1 Touchscreen technology 1965 Johnson created device with wires, sensitive to the touch of a finger, on the face of a CRT 1971 Hurst made
Touchscreens, tablets and digitizers RNDr. Róbert Bohdal, PhD. 1 Touchscreen technology 1965 Johnson created device with wires, sensitive to the touch of a finger, on the face of a CRT 1971 Hurst made
Piezoelectric Sensors and Actuators
 Piezoelectric Sensors and Actuators Outline Piezoelectricity Origin Polarization and depolarization Mathematical expression of piezoelectricity Piezoelectric coefficient matrix Cantilever piezoelectric
Piezoelectric Sensors and Actuators Outline Piezoelectricity Origin Polarization and depolarization Mathematical expression of piezoelectricity Piezoelectric coefficient matrix Cantilever piezoelectric
Self powered microsystem with electromechanical generator
 Self powered microsystem with electromechanical generator JANÍČEK VLADIMÍR, HUSÁK MIROSLAV Department of Microelectronics FEE CTU Prague Technická 2, 16627 Prague 6 CZECH REPUBLIC, http://micro.feld.cvut.cz
Self powered microsystem with electromechanical generator JANÍČEK VLADIMÍR, HUSÁK MIROSLAV Department of Microelectronics FEE CTU Prague Technická 2, 16627 Prague 6 CZECH REPUBLIC, http://micro.feld.cvut.cz
The Integument Laboratory
 Name Period Ms. Pfeil A# Activity: 1 Visualizing Changes in Skin Color Due to Continuous External Pressure Go to the supply area and obtain a small glass plate. Press the heel of your hand firmly against
Name Period Ms. Pfeil A# Activity: 1 Visualizing Changes in Skin Color Due to Continuous External Pressure Go to the supply area and obtain a small glass plate. Press the heel of your hand firmly against
Sensing the Texture of Surfaces by Anthropomorphic Soft Fingertips with Multi-Modal Sensors
 Sensing the Texture of Surfaces by Anthropomorphic Soft Fingertips with Multi-Modal Sensors Yasunori Tada, Koh Hosoda, Yusuke Yamasaki, and Minoru Asada Department of Adaptive Machine Systems, HANDAI Frontier
Sensing the Texture of Surfaces by Anthropomorphic Soft Fingertips with Multi-Modal Sensors Yasunori Tada, Koh Hosoda, Yusuke Yamasaki, and Minoru Asada Department of Adaptive Machine Systems, HANDAI Frontier
Feel the Real World. The final haptic feedback design solution
 Feel the Real World The final haptic feedback design solution Touch is. how we interact with... how we feel... how we experience the WORLD. Touch Introduction Touch screens are replacing traditional user
Feel the Real World The final haptic feedback design solution Touch is. how we interact with... how we feel... how we experience the WORLD. Touch Introduction Touch screens are replacing traditional user
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Tactile Sensing - From Humans to Humanoids
 1 Tactile Sensing - From Humans to Humanoids Ravinder S. Dahiya, Student Member, IEEE, Giorgio Metta, Maurizio Valle, Member, IEEE and Giulio Sandini Abstract Starting from human sense of touch, this work
1 Tactile Sensing - From Humans to Humanoids Ravinder S. Dahiya, Student Member, IEEE, Giorgio Metta, Maurizio Valle, Member, IEEE and Giulio Sandini Abstract Starting from human sense of touch, this work
Design and Controll of Haptic Glove with McKibben Pneumatic Muscle
 XXVIII. ASR '2003 Seminar, Instruments and Control, Ostrava, May 6, 2003 173 Design and Controll of Haptic Glove with McKibben Pneumatic Muscle KOPEČNÝ, Lukáš Ing., Department of Control and Instrumentation,
XXVIII. ASR '2003 Seminar, Instruments and Control, Ostrava, May 6, 2003 173 Design and Controll of Haptic Glove with McKibben Pneumatic Muscle KOPEČNÝ, Lukáš Ing., Department of Control and Instrumentation,
¾ B-TECH (IT) ¾ B-TECH (IT)
 ¾ B-TECH (IT)") HAPTIC TECHNOLOGY V.R.Siddhartha Engineering College Vijayawada. Presented by Sudheer Kumar.S CH.Sreekanth ¾ B-TECH (IT) ¾ B-TECH (IT) Email:samudralasudheer@yahoo.com Email:shri_136@yahoo.co.in Introduction
HAPTIC TECHNOLOGY V.R.Siddhartha Engineering College Vijayawada. Presented by Sudheer Kumar.S CH.Sreekanth ¾ B-TECH (IT) ¾ B-TECH (IT) Email:samudralasudheer@yahoo.com Email:shri_136@yahoo.co.in Introduction
Beyond Visual: Shape, Haptics and Actuation in 3D UI
 Beyond Visual: Shape, Haptics and Actuation in 3D UI Ivan Poupyrev Welcome, Introduction, & Roadmap 3D UIs 101 3D UIs 201 User Studies and 3D UIs Guidelines for Developing 3D UIs Video Games: 3D UIs for
Beyond Visual: Shape, Haptics and Actuation in 3D UI Ivan Poupyrev Welcome, Introduction, & Roadmap 3D UIs 101 3D UIs 201 User Studies and 3D UIs Guidelines for Developing 3D UIs Video Games: 3D UIs for
Design & Simulation of Multi Gate Piezoelectric FET Devices for Sensing Applications
 Design & Simulation of Multi Gate Piezoelectric FET Devices for Sensing Applications Sunita Malik 1, Manoj Kumar Duhan 2 Electronics & Communication Engineering Department, Deenbandhu Chhotu Ram University
Design & Simulation of Multi Gate Piezoelectric FET Devices for Sensing Applications Sunita Malik 1, Manoj Kumar Duhan 2 Electronics & Communication Engineering Department, Deenbandhu Chhotu Ram University
Lecture 8: Tactile devices
 ME 327: Design and Control of Haptic Systems Winter 2018 Lecture 8: Tactile devices Allison M. Okamura Stanford University tactile haptic devices tactile feedback goal is to stimulate the skin in a programmable
ME 327: Design and Control of Haptic Systems Winter 2018 Lecture 8: Tactile devices Allison M. Okamura Stanford University tactile haptic devices tactile feedback goal is to stimulate the skin in a programmable
Sensing. Autonomous systems. Properties. Classification. Key requirement of autonomous systems. An AS should be connected to the outside world.
 Sensing Key requirement of autonomous systems. An AS should be connected to the outside world. Autonomous systems Convert a physical value to an electrical value. From temperature, humidity, light, to
Sensing Key requirement of autonomous systems. An AS should be connected to the outside world. Autonomous systems Convert a physical value to an electrical value. From temperature, humidity, light, to
Haptic interaction. Ruth Aylett
 Haptic interaction Ruth Aylett Contents Haptic definition Haptic model Haptic devices Measuring forces Haptic Technologies Haptics refers to manual interactions with environments, such as sensorial exploration
Haptic interaction Ruth Aylett Contents Haptic definition Haptic model Haptic devices Measuring forces Haptic Technologies Haptics refers to manual interactions with environments, such as sensorial exploration
Haptic Technology- Comprehensive Review Study with its Applications
 Haptic Technology- Comprehensive Review Study with its Applications Tanya Jaiswal 1, Rambha Yadav 2, Pooja Kedia 3 1,2 Student, Department of Computer Science and Engineering, Buddha Institute of Technology,
Haptic Technology- Comprehensive Review Study with its Applications Tanya Jaiswal 1, Rambha Yadav 2, Pooja Kedia 3 1,2 Student, Department of Computer Science and Engineering, Buddha Institute of Technology,
sensing & sensors CMU SCS RI S2009 Haptic and Tactile Sensors for Planetary Exploration Robots
 sensing & sensors CMU SCS RI Haptic and for Planetary Exploration Robots M. Emre Karagozler emre@cmu.edu Version 5 1 Haptics, Tactile Sensing: In robotics, they are used in slightly different context:
sensing & sensors CMU SCS RI Haptic and for Planetary Exploration Robots M. Emre Karagozler emre@cmu.edu Version 5 1 Haptics, Tactile Sensing: In robotics, they are used in slightly different context:
Introduction to Haptics
 Introduction to Haptics Roope Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction (TAUCHI) Department of Computer Sciences University of Tampere, Finland Definition
Introduction to Haptics Roope Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction (TAUCHI) Department of Computer Sciences University of Tampere, Finland Definition
Haptics and the User Interface
 Haptics and the User Interface based on slides from Karon MacLean, original slides available at: http://www.cs.ubc.ca/~maclean/publics/ what is haptic? from Greek haptesthai : to touch Haptic User Interfaces
Haptics and the User Interface based on slides from Karon MacLean, original slides available at: http://www.cs.ubc.ca/~maclean/publics/ what is haptic? from Greek haptesthai : to touch Haptic User Interfaces
Magnetic Micro Testing System Microservo MMT Series C225-E014A
 Magnetic Micro Testing System Microservo MMT Series C225-E014A Microservo MMT Series Magnetic Micro Testing System In recent years strength evaluation of micro materials and micro parts is increasing its
Magnetic Micro Testing System Microservo MMT Series C225-E014A Microservo MMT Series Magnetic Micro Testing System In recent years strength evaluation of micro materials and micro parts is increasing its
Output Devices - Non-Visual
 IMGD 5100: Immersive HCI Output Devices - Non-Visual Robert W. Lindeman Associate Professor Department of Computer Science Worcester Polytechnic Institute gogo@wpi.edu Overview Here we are concerned with
IMGD 5100: Immersive HCI Output Devices - Non-Visual Robert W. Lindeman Associate Professor Department of Computer Science Worcester Polytechnic Institute gogo@wpi.edu Overview Here we are concerned with
Humanoid robot. Honda's ASIMO, an example of a humanoid robot
 Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
Humanoid robot Honda's ASIMO, an example of a humanoid robot A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments.
tactile perception according to texts of Vincent Hayward, J.J Gibson. florian wille // tactile perception // // 1 of 15
 tactile perception according to texts of Vincent Hayward, J.J Gibson. florian wille // tactile perception // 30.11.2009 // 1 of 15 tactile vs visual sense The two senses complement each other. Where as
tactile perception according to texts of Vincent Hayward, J.J Gibson. florian wille // tactile perception // 30.11.2009 // 1 of 15 tactile vs visual sense The two senses complement each other. Where as
Psychology in Your Life
 Sarah Grison Todd Heatherton Michael Gazzaniga Psychology in Your Life FIRST EDITION Chapter 5 Sensation and Perception 2014 W. W. Norton & Company, Inc. Section 5.1 How Do Sensation and Perception Affect
Sarah Grison Todd Heatherton Michael Gazzaniga Psychology in Your Life FIRST EDITION Chapter 5 Sensation and Perception 2014 W. W. Norton & Company, Inc. Section 5.1 How Do Sensation and Perception Affect
2. Introduction to Computer Haptics
 2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
Haptic Feedback Technology
 Haptic Feedback Technology ECE480: Design Team 4 Application Note Michael Greene Abstract: With the daily interactions between humans and their surrounding technology growing exponentially, the development
Haptic Feedback Technology ECE480: Design Team 4 Application Note Michael Greene Abstract: With the daily interactions between humans and their surrounding technology growing exponentially, the development
Evaluation of Five-finger Haptic Communication with Network Delay
 Tactile Communication Haptic Communication Network Delay Evaluation of Five-finger Haptic Communication with Network Delay To realize tactile communication, we clarify some issues regarding how delay affects
Tactile Communication Haptic Communication Network Delay Evaluation of Five-finger Haptic Communication with Network Delay To realize tactile communication, we clarify some issues regarding how delay affects
Heads up interaction: glasgow university multimodal research. Eve Hoggan
 Heads up interaction: glasgow university multimodal research Eve Hoggan www.tactons.org multimodal interaction Multimodal Interaction Group Key area of work is Multimodality A more human way to work Not
Heads up interaction: glasgow university multimodal research Eve Hoggan www.tactons.org multimodal interaction Multimodal Interaction Group Key area of work is Multimodality A more human way to work Not
Technologies. Philippe Fuchs Ecole des Mines, ParisTech, Paris, France. Virtual Reality: Concepts and. Guillaume Moreau.
 Virtual Reality: Concepts and Technologies Editors Philippe Fuchs Ecole des Mines, ParisTech, Paris, France Guillaume Moreau Ecole Centrale de Nantes, CERMA, Nantes, France Pascal Guitton INRIA, University
Virtual Reality: Concepts and Technologies Editors Philippe Fuchs Ecole des Mines, ParisTech, Paris, France Guillaume Moreau Ecole Centrale de Nantes, CERMA, Nantes, France Pascal Guitton INRIA, University
Next Generation Haptics: Market Analysis and Forecasts
 Next Generation Haptics: Market Analysis and Forecasts SECTOR REPORT Next Generation Haptics: Market Analysis and Forecasts February 2011 Peter Crocker Lead Analyst Matt Lewis Research Director ARCchart
Next Generation Haptics: Market Analysis and Forecasts SECTOR REPORT Next Generation Haptics: Market Analysis and Forecasts February 2011 Peter Crocker Lead Analyst Matt Lewis Research Director ARCchart
Sensors for Mechatronics
 Sensors for Mechatronics Paul P.L Regtien Hertgelo The Netherlands AMSTERDAM BOSTON HEIDELBERG LONDON NEW YORK' OXFORD ELSEVIER PARIS SAN DIEGO SAN FRANCISCO SINGAPORE SYDNEY TOKYO Contents Preface xi
Sensors for Mechatronics Paul P.L Regtien Hertgelo The Netherlands AMSTERDAM BOSTON HEIDELBERG LONDON NEW YORK' OXFORD ELSEVIER PARIS SAN DIEGO SAN FRANCISCO SINGAPORE SYDNEY TOKYO Contents Preface xi
Design of New Micro Actuator for Tactile Display
 Proceedings of the 17th World Congress The International Federation of Automatic Control Design of New Micro Actuator for Tactile Display Tae-Heon Yang*, Sang Youn Kim**, and Dong-Soo Kwon*** * Department
Proceedings of the 17th World Congress The International Federation of Automatic Control Design of New Micro Actuator for Tactile Display Tae-Heon Yang*, Sang Youn Kim**, and Dong-Soo Kwon*** * Department
Interactive Simulation: UCF EIN5255. VR Software. Audio Output. Page 4-1
 VR Software Class 4 Dr. Nabil Rami http://www.simulationfirst.com/ein5255/ Audio Output Can be divided into two elements: Audio Generation Audio Presentation Page 4-1 Audio Generation A variety of audio
VR Software Class 4 Dr. Nabil Rami http://www.simulationfirst.com/ein5255/ Audio Output Can be divided into two elements: Audio Generation Audio Presentation Page 4-1 Audio Generation A variety of audio
Sensors. human sensing. basic sensory. advanced sensory. 5+N senses <link> tactile touchless (distant) virtual. e.g. camera, radar / lidar, MS Kinect
 virtual. e.g. camera, radar / lidar, MS Kinect") Sensors human sensing 5+N senses basic sensory tactile touchless (distant) virtual advanced sensory e.g. camera, radar / lidar, MS Kinect Human senses Traditional sight smell taste touch hearing
Sensors human sensing 5+N senses basic sensory tactile touchless (distant) virtual advanced sensory e.g. camera, radar / lidar, MS Kinect Human senses Traditional sight smell taste touch hearing
Testování a vývoj taktilních senzorů Testing and Development Tactile Sensors
 Testování a vývoj taktilních senzorů Testing and Development Tactile Sensors Ing. René Neděla Abstrakt: Tento příspěvek se zabývá problematikou taktilních senzorů. Jsou zde uvedeny některé příklady taktilních
Testování a vývoj taktilních senzorů Testing and Development Tactile Sensors Ing. René Neděla Abstrakt: Tento příspěvek se zabývá problematikou taktilních senzorů. Jsou zde uvedeny některé příklady taktilních
Acquisition of Multi-Modal Expression of Slip through Pick-Up Experiences
 Acquisition of Multi-Modal Expression of Slip through Pick-Up Experiences Yasunori Tada* and Koh Hosoda** * Dept. of Adaptive Machine Systems, Osaka University ** Dept. of Adaptive Machine Systems, HANDAI
Acquisition of Multi-Modal Expression of Slip through Pick-Up Experiences Yasunori Tada* and Koh Hosoda** * Dept. of Adaptive Machine Systems, Osaka University ** Dept. of Adaptive Machine Systems, HANDAI
Development of intelligent systems
 Development of intelligent systems (RInS) Robot sensors Danijel Skočaj University of Ljubljana Faculty of Computer and Information Science Academic year: 2017/18 Development of intelligent systems Robotic
Development of intelligent systems (RInS) Robot sensors Danijel Skočaj University of Ljubljana Faculty of Computer and Information Science Academic year: 2017/18 Development of intelligent systems Robotic
Sensing self motion. Key points: Why robots need self-sensing Sensors for proprioception in biological systems in robot systems
 Sensing self motion Key points: Why robots need self-sensing Sensors for proprioception in biological systems in robot systems Position sensing Velocity and acceleration sensing Force sensing Vision based
Sensing self motion Key points: Why robots need self-sensing Sensors for proprioception in biological systems in robot systems Position sensing Velocity and acceleration sensing Force sensing Vision based
Haplug: A Haptic Plug for Dynamic VR Interactions
 Haplug: A Haptic Plug for Dynamic VR Interactions Nobuhisa Hanamitsu *, Ali Israr Disney Research, USA nobuhisa.hanamitsu@disneyresearch.com Abstract. We demonstrate applications of a new actuator, the
Haplug: A Haptic Plug for Dynamic VR Interactions Nobuhisa Hanamitsu *, Ali Israr Disney Research, USA nobuhisa.hanamitsu@disneyresearch.com Abstract. We demonstrate applications of a new actuator, the
Using Simple Force Feedback Mechanisms as Haptic Visualization Tools.
 Using Simple Force Feedback Mechanisms as Haptic Visualization Tools. Anders J Johansson, Joakim Linde Teiresias Research Group (www.bigfoot.com/~teiresias) Abstract Force feedback (FF) is a technology
Using Simple Force Feedback Mechanisms as Haptic Visualization Tools. Anders J Johansson, Joakim Linde Teiresias Research Group (www.bigfoot.com/~teiresias) Abstract Force feedback (FF) is a technology
Touching and Walking: Issues in Haptic Interface
 Touching and Walking: Issues in Haptic Interface Hiroo Iwata 1 1 Institute of Engineering Mechanics and Systems, University of Tsukuba, 80, Tsukuba, 305-8573 Japan iwata@kz.tsukuba.ac.jp Abstract. This
Touching and Walking: Issues in Haptic Interface Hiroo Iwata 1 1 Institute of Engineering Mechanics and Systems, University of Tsukuba, 80, Tsukuba, 305-8573 Japan iwata@kz.tsukuba.ac.jp Abstract. This
Haptic Rendering and Volumetric Visualization with SenSitus
 Haptic Rendering and Volumetric Visualization with SenSitus Stefan Birmanns, Ph.D. Department of Molecular Biology The Scripps Research Institute 10550 N. Torrey Pines Road, Mail TPC6 La Jolla, California,
Haptic Rendering and Volumetric Visualization with SenSitus Stefan Birmanns, Ph.D. Department of Molecular Biology The Scripps Research Institute 10550 N. Torrey Pines Road, Mail TPC6 La Jolla, California,
Biomimetic Design of Actuators, Sensors and Robots
 Biomimetic Design of Actuators, Sensors and Robots Takashi Maeno, COE Member of autonomous-cooperative robotics group Department of Mechanical Engineering Keio University Abstract Biological life has greatly
Biomimetic Design of Actuators, Sensors and Robots Takashi Maeno, COE Member of autonomous-cooperative robotics group Department of Mechanical Engineering Keio University Abstract Biological life has greatly
Graphical User Interfaces for Blind Users: An Overview of Haptic Devices
 Graphical User Interfaces for Blind Users: An Overview of Haptic Devices Hasti Seifi, CPSC554m: Assignment 1 Abstract Graphical user interfaces greatly enhanced usability of computer systems over older
Graphical User Interfaces for Blind Users: An Overview of Haptic Devices Hasti Seifi, CPSC554m: Assignment 1 Abstract Graphical user interfaces greatly enhanced usability of computer systems over older
MEMS for RF, Micro Optics and Scanning Probe Nanotechnology Applications
 MEMS for RF, Micro Optics and Scanning Probe Nanotechnology Applications Part I: RF Applications Introductions and Motivations What are RF MEMS? Example Devices RFIC RFIC consists of Active components
MEMS for RF, Micro Optics and Scanning Probe Nanotechnology Applications Part I: RF Applications Introductions and Motivations What are RF MEMS? Example Devices RFIC RFIC consists of Active components
HAND-SHAPED INTERFACE FOR INTUITIVE HUMAN- ROBOT COMMUNICATION THROUGH HAPTIC MEDIA
 HAND-SHAPED INTERFACE FOR INTUITIVE HUMAN- ROBOT COMMUNICATION THROUGH HAPTIC MEDIA RIKU HIKIJI AND SHUJI HASHIMOTO Department of Applied Physics, School of Science and Engineering, Waseda University 3-4-1
HAND-SHAPED INTERFACE FOR INTUITIVE HUMAN- ROBOT COMMUNICATION THROUGH HAPTIC MEDIA RIKU HIKIJI AND SHUJI HASHIMOTO Department of Applied Physics, School of Science and Engineering, Waseda University 3-4-1
IOSR Journal of Engineering (IOSRJEN) e-issn: , p-issn: , Volume 2, Issue 11 (November 2012), PP 37-43
 e-issn: , p-issn: , Volume 2, Issue 11 (November 2012), PP 37-43") IOSR Journal of Engineering (IOSRJEN) e-issn: 2250-3021, p-issn: 2278-8719, Volume 2, Issue 11 (November 2012), PP 37-43 Operative Precept of robotic arm expending Haptic Virtual System Arnab Das 1, Swagat
IOSR Journal of Engineering (IOSRJEN) e-issn: 2250-3021, p-issn: 2278-8719, Volume 2, Issue 11 (November 2012), PP 37-43 Operative Precept of robotic arm expending Haptic Virtual System Arnab Das 1, Swagat
Haptic Feedback in Laparoscopic and Robotic Surgery
 Haptic Feedback in Laparoscopic and Robotic Surgery Dr. Warren Grundfest Professor Bioengineering, Electrical Engineering & Surgery UCLA, Los Angeles, California Acknowledgment This Presentation & Research
Haptic Feedback in Laparoscopic and Robotic Surgery Dr. Warren Grundfest Professor Bioengineering, Electrical Engineering & Surgery UCLA, Los Angeles, California Acknowledgment This Presentation & Research
Force feedback interfaces & applications
 Force feedback interfaces & applications Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jukka Raisamo,
Force feedback interfaces & applications Roope Raisamo Tampere Unit for Computer-Human Interaction (TAUCHI) School of Information Sciences University of Tampere, Finland Based on material by Jukka Raisamo,
Ultrasonic. Advantages
 Ultrasonic Advantages Non-Contact: Nothing touches the target object Measures Distance: The distance to the target is measured, not just its presence Long and Short Range: Objects can be sensed from 2
Ultrasonic Advantages Non-Contact: Nothing touches the target object Measures Distance: The distance to the target is measured, not just its presence Long and Short Range: Objects can be sensed from 2
WEARABLE HAPTIC DISPLAY FOR IMMERSIVE VIRTUAL ENVIRONMENT
 WEARABLE HAPTIC DISPLAY FOR IMMERSIVE VIRTUAL ENVIRONMENT Yutaka TANAKA*, Hisayuki YAMAUCHI* *, Kenichi AMEMIYA*** * Department of Mechanical Engineering, Faculty of Engineering Hosei University Kajinocho,
WEARABLE HAPTIC DISPLAY FOR IMMERSIVE VIRTUAL ENVIRONMENT Yutaka TANAKA*, Hisayuki YAMAUCHI* *, Kenichi AMEMIYA*** * Department of Mechanical Engineering, Faculty of Engineering Hosei University Kajinocho,
Sensation and Perception
 Page 94 Check syllabus! We are starting with Section 6-7 in book. Sensation and Perception Our Link With the World Shorter wavelengths give us blue experience Longer wavelengths give us red experience
Page 94 Check syllabus! We are starting with Section 6-7 in book. Sensation and Perception Our Link With the World Shorter wavelengths give us blue experience Longer wavelengths give us red experience
ACTUATORS AND SENSORS. Joint actuating system. Servomotors. Sensors
 ACTUATORS AND SENSORS Joint actuating system Servomotors Sensors JOINT ACTUATING SYSTEM Transmissions Joint motion low speeds high torques Spur gears change axis of rotation and/or translate application
ACTUATORS AND SENSORS Joint actuating system Servomotors Sensors JOINT ACTUATING SYSTEM Transmissions Joint motion low speeds high torques Spur gears change axis of rotation and/or translate application
Computer Haptics and Applications
 Computer Haptics and Applications EURON Summer School 2003 Cagatay Basdogan, Ph.D. College of Engineering Koc University, Istanbul, 80910 (http://network.ku.edu.tr/~cbasdogan) Resources: EURON Summer School
Computer Haptics and Applications EURON Summer School 2003 Cagatay Basdogan, Ph.D. College of Engineering Koc University, Istanbul, 80910 (http://network.ku.edu.tr/~cbasdogan) Resources: EURON Summer School
Modelling and Simulation of Tactile Sensing System of Fingers for Intelligent Robotic Manipulation Control
 20th International Congress on Modelling and Simulation, Adelaide, Australia, 1 6 December 2013 www.mssanz.org.au/modsim2013 Modelling and Simulation of Tactile Sensing System of Fingers for Intelligent
20th International Congress on Modelling and Simulation, Adelaide, Australia, 1 6 December 2013 www.mssanz.org.au/modsim2013 Modelling and Simulation of Tactile Sensing System of Fingers for Intelligent
Human Factors. We take a closer look at the human factors that affect how people interact with computers and software:
 Human Factors We take a closer look at the human factors that affect how people interact with computers and software: Physiology physical make-up, capabilities Cognition thinking, reasoning, problem-solving,
Human Factors We take a closer look at the human factors that affect how people interact with computers and software: Physiology physical make-up, capabilities Cognition thinking, reasoning, problem-solving,
Development of integrated tactile display devices
 University of Wollongong Research Online Faculty of Engineering - Papers (Archive) Faculty of Engineering and Information Sciences 2009 Development of integrated tactile display devices Hyouk Ryeol Choi
University of Wollongong Research Online Faculty of Engineering - Papers (Archive) Faculty of Engineering and Information Sciences 2009 Development of integrated tactile display devices Hyouk Ryeol Choi
FORCE FEEDBACK. Roope Raisamo
 FORCE FEEDBACK Roope Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere, Finland Outline Force feedback interfaces
FORCE FEEDBACK Roope Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere, Finland Outline Force feedback interfaces
Research articles Pneumatic proximity-to-tactile imaging device
 Research articles Pneumatic proximity-to-tactile imaging device R. Benhadj and R.L. Roome The authors are based at the School of Mechanical, Aeronautical and Production Engineering, Kingston University,
Research articles Pneumatic proximity-to-tactile imaging device R. Benhadj and R.L. Roome The authors are based at the School of Mechanical, Aeronautical and Production Engineering, Kingston University,
Proceedings of the 33rd ISR (International Symposium on Robotics) October 7 11,
 October 7 11,") Method for eliciting tactile sensation using vibrating stimuli in tangential direction : Effect of frequency, amplitude and wavelength of vibrating stimuli on roughness perception NaoeTatara, Masayuki
Method for eliciting tactile sensation using vibrating stimuli in tangential direction : Effect of frequency, amplitude and wavelength of vibrating stimuli on roughness perception NaoeTatara, Masayuki
MEASURING AND ANALYZING FINE MOTOR SKILLS
 MEASURING AND ANALYZING FINE MOTOR SKILLS PART 1: MOTION TRACKING AND EMG OF FINE MOVEMENTS PART 2: HIGH-FIDELITY CAPTURE OF HAND AND FINGER BIOMECHANICS Abstract This white paper discusses an example
MEASURING AND ANALYZING FINE MOTOR SKILLS PART 1: MOTION TRACKING AND EMG OF FINE MOVEMENTS PART 2: HIGH-FIDELITY CAPTURE OF HAND AND FINGER BIOMECHANICS Abstract This white paper discusses an example
Electrical stimulation of mechanoreceptors
 Electrical stimulation of mechanoreceptors AM Echenique, JP Graffigna Gabinete de Tecnología Médica. Universidad Nacional de San Juan Av. Libertador 1109 (oeste). San Juan. Argentina E-mail: amechenique@gateme.unsj.edu.ar
Electrical stimulation of mechanoreceptors AM Echenique, JP Graffigna Gabinete de Tecnología Médica. Universidad Nacional de San Juan Av. Libertador 1109 (oeste). San Juan. Argentina E-mail: amechenique@gateme.unsj.edu.ar
9/28/2010. Chapter , The McGraw-Hill Companies, Inc.
 Chapter 4 Sensors are are used to detect, and often to measure, the magnitude of something. They basically operate by converting mechanical, magnetic, thermal, optical, and chemical variations into electric
Chapter 4 Sensors are are used to detect, and often to measure, the magnitude of something. They basically operate by converting mechanical, magnetic, thermal, optical, and chemical variations into electric
Aural and Haptic Displays
 Teil 5: Aural and Haptic Displays Virtuelle Realität Wintersemester 2007/08 Prof. Bernhard Jung Overview Aural Displays Haptic Displays Further information: The Haptics Community Web Site: http://haptic.mech.northwestern.edu/
Teil 5: Aural and Haptic Displays Virtuelle Realität Wintersemester 2007/08 Prof. Bernhard Jung Overview Aural Displays Haptic Displays Further information: The Haptics Community Web Site: http://haptic.mech.northwestern.edu/
R (2) Controlling System Application with hands by identifying movements through Camera
 Controlling System Application with hands by identifying movements through Camera") R (2) N (5) Oral (3) Total (10) Dated Sign Assignment Group: C Problem Definition: Controlling System Application with hands by identifying movements through Camera Prerequisite: 1. Web Cam Connectivity
R (2) N (5) Oral (3) Total (10) Dated Sign Assignment Group: C Problem Definition: Controlling System Application with hands by identifying movements through Camera Prerequisite: 1. Web Cam Connectivity
Abdulmotaleb El Saddik Associate Professor Dr.-Ing., SMIEEE, P.Eng.
 Abdulmotaleb El Saddik Associate Professor Dr.-Ing., SMIEEE, P.Eng. Multimedia Communications Research Laboratory University of Ottawa Ontario Research Network of E-Commerce www.mcrlab.uottawa.ca abed@mcrlab.uottawa.ca
Abdulmotaleb El Saddik Associate Professor Dr.-Ing., SMIEEE, P.Eng. Multimedia Communications Research Laboratory University of Ottawa Ontario Research Network of E-Commerce www.mcrlab.uottawa.ca abed@mcrlab.uottawa.ca
APPLICATION NOTE 695 New ICs Revolutionize The Sensor Interface
 Maxim > Design Support > Technical Documents > Application Notes > Sensors > APP 695 Keywords: high performance, low cost, signal conditioner, signal conditioning, precision sensor, signal conditioner,
Maxim > Design Support > Technical Documents > Application Notes > Sensors > APP 695 Keywords: high performance, low cost, signal conditioner, signal conditioning, precision sensor, signal conditioner,
Sonic Distance Sensors
 Sonic Distance Sensors Introduction - Sound is transmitted through the propagation of pressure in the air. - The speed of sound in the air is normally 331m/sec at 0 o C. - Two of the important characteristics
Sonic Distance Sensors Introduction - Sound is transmitted through the propagation of pressure in the air. - The speed of sound in the air is normally 331m/sec at 0 o C. - Two of the important characteristics
3/24/11. Introduction! Electrogenic cell
 March 2011 Introduction! Electrogenic cell Electrode/electrolyte interface! Electrical double layer! Half-cell potential! Polarization! Electrode equivalent circuits Biopotential electrodes! Body surface
March 2011 Introduction! Electrogenic cell Electrode/electrolyte interface! Electrical double layer! Half-cell potential! Polarization! Electrode equivalent circuits Biopotential electrodes! Body surface
A Method of Selective Stimulation to Epidermal Skin Receptors for Realistic Touch Feedback
 Proceedings of IEEE Virtual Reality '99 Conference A Method of Selective Stimulation to Epidermal Skin Receptors for Realistic Touch Feedback Naoya ASAMURA, Nozomu YOKOYAMA and Hiroyuki SHINODA Department
Proceedings of IEEE Virtual Reality '99 Conference A Method of Selective Stimulation to Epidermal Skin Receptors for Realistic Touch Feedback Naoya ASAMURA, Nozomu YOKOYAMA and Hiroyuki SHINODA Department
International Journal of Advanced Research in Computer Science and Software Engineering
 Volume 3, Issue 3, March 2013 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com A Study on SensAble
Volume 3, Issue 3, March 2013 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com A Study on SensAble
Complementary Tactile Sensor and Human Interface for Robotic Telemanipulation
 Complementary Tactile Sensor and Human Interface for Robotic Telemanipulation Emil M. Petriu, Pierre Payeur, na-maria Cretu, and Codrin Pasca School of Information Technology and Engineering University
Complementary Tactile Sensor and Human Interface for Robotic Telemanipulation Emil M. Petriu, Pierre Payeur, na-maria Cretu, and Codrin Pasca School of Information Technology and Engineering University
Haptic Sensors and Interfaces
 Haptic Sensors and Interfaces Emil M. Petriu, Dr. Eng., FIEEE School of Electrical Engineering and Computer Science University of Ottawa, Canada http://www.site.uottawa.ca/~petriu Human Haptic Perception
Haptic Sensors and Interfaces Emil M. Petriu, Dr. Eng., FIEEE School of Electrical Engineering and Computer Science University of Ottawa, Canada http://www.site.uottawa.ca/~petriu Human Haptic Perception
PvdF Piezoelectric Film Based Force Measuring System
 Research Journal of Applied Sciences, Engineering and Technology 4(16): 2857-2861, 2012 ISSN: 2040-7467 Maxwell Scientific Organization, 2012 Submitted: March 31, 2012 Accepted: April 17, 2012 Published:
Research Journal of Applied Sciences, Engineering and Technology 4(16): 2857-2861, 2012 ISSN: 2040-7467 Maxwell Scientific Organization, 2012 Submitted: March 31, 2012 Accepted: April 17, 2012 Published:
Input-output channels
 Input-output channels Human Computer Interaction (HCI) Human input Using senses Sight, hearing, touch, taste and smell Sight, hearing & touch have important role in HCI Input-Output Channels Human output
Input-output channels Human Computer Interaction (HCI) Human input Using senses Sight, hearing, touch, taste and smell Sight, hearing & touch have important role in HCI Input-Output Channels Human output
Range Sensing strategies
 Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called