Quantitative Assessment of the Effectiveness of Using Display Techniques with a Haptic Device for Manipulating 3D Objects in Virtual Environments
|
|
|
- Eleanor Horn
- 5 years ago
- Views:
Transcription
1 Quantitative Assessment of the Effectiveness of Using Display Techniques with a Haptic Device for Manipulating 3D Objects in Virtual Environments Rifat Arasa, Yuzhong Shena, Ahmed Noor Department of Modeling, Simulation, and Visualization Engineering, Old Dominion University 1300 Engineering & Computational Sciences Bldg, Norfolk, VA Abstract: Quantitative assessment is made of using two display techniques, providing two different levels of depth perception, in conjunction with a haptic device for manipulating 3D objects in virtual environments. The two display techniques are 2D display, and interactive 3D stereoscopic virtual holography display on a zspace tablet. Experiments were conducted, by several users of different ages and computer training. The experiments involved selected pointing and manipulation tasks. The speed of performing the tasks using the two display techniques were recorded. Statistical analysis of the data is presented. As expected, the use of interactive 3D stereoscopic display resulted in faster performance of the tasks. The improvement in performance was particularly noticeable for the cases wherein the subjects needed to manipulate the haptic arm to reach objects / targets at different depths, and also when the objects / targets were occluded partially by the obstacles. Keywords: Haptic Interaction, Virtual Holography, Display Techniques, Multimodal Interaction, Virtual Environments 1. Introduction Haptic interface technologies, which mediate the sense of touch and proprioception, represent a rapidly growing field with wide spectrum of applications ranging from tele-robotics (control of machines and devices), entertainment, and mobile devices to realistic simulators for training and planning of surgical procedures. The use of haptic devices enables the users of virtual environments to reach the virtual 3D objects, and also touch and feel the simulated objects they interact with. Several recent advances have been made in haptic interface technologies [1-3], and several national and international meetings have been organized, which were devoted to haptic technologies. Examples include IEEE World Haptics, EuroHaptics, and the ACM Symposium on User Interface Software and Technology [4-6]. Reviews of the status and some of the recent developments in haptic technologies are given in the generalized state of the art survey [7], and in the focused survey on medical training simulator [8]. Among the new developments of haptic technologies are the novel haptic input-output devices such as AIREAL [2]. The device uses free air flow to transfer sense of touch information. The
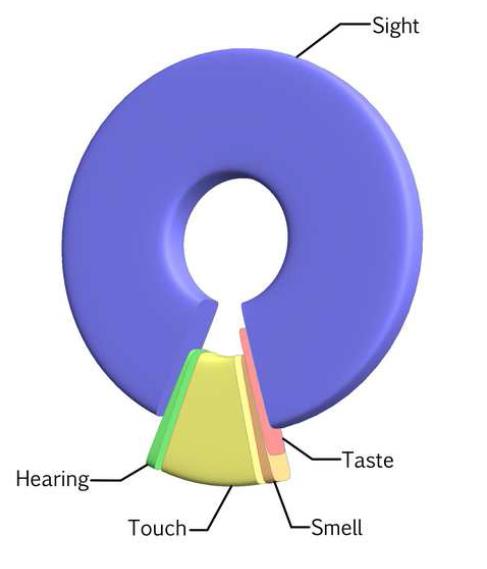
2 user, while not required to be in contact with the physical device, is able to feel virtual objects, experience dynamically varying textures, and receive feedback on full-body gestures. Some recent work has been devoted to haptic representation of data charts, geographic maps, and pictures [9], as well as on creating haptic devices with smaller form-factors, and embedding them into ubiquitous and/or wearable technologies [10]. The present study focuses on coupling interactive stereoscopic tablet display with haptic interaction for manipulating 3D objects. The impact of this coupling on the depth perception along with the performance of users in virtual environments are also investigated. The force feedback capabilities of the haptic device are not used in the study. 2. Brief Review of Previous Relevant Work on Using Haptics in Multimodal Interactions Modalities are the sensory channels or pathways through which individuals give, receive, and store information. The visual, auditory, tactile/kinesthetic, smell, and taste senses mediate information from the environment to the person. The inbound information bandwidth for different modalities is different for each individual. The average share of each modality on a person's perception, memory, and sensation abilities was studied by Nørretranders [11] (Figure 1). Seaborn et al. [12] demonstrated the effect of presenting information through both visual and haptic channels on the efficiency of cognitive load. In their study, the pattern matching tasks were presented to the participants using visual, haptic, or visual + haptic modalities. Their results suggested that the working memory is not strictly shared among the visual and haptic channels. This is important for visuo-haptic coupling studies as it indicates memory recall may be strengthened by utilizing both visual and haptic modalities. Lecuyer et al. [13] examined various ways of combining visual, haptic, and brain-based interfaces. The users of the virtual environment received haptic assistance towards specific goals, such as path-tracking, according to their current mental workload, which was measured by the brain-based interface. The authors measured the path tracking task performance under three conditions: no assistance, mental workload-based haptic assistance, and continuous haptic assistance. Their results showed that using workload-based assistance results in significantly better performance than not receiving any assistance. There was no significant difference between the performances of workload-based assistance and continuous assistance. Evreinova et al. [14] studied the performance of haptic exploration of simple geometric shapes in the absence of visual feedback. Their findings suggested that haptic exploration, in the applications considered, was robust and sufficient even if it was not backed up with a visual feedback. Lawrence et al. [15] studied the effect of synergistic visual / haptic coupling on the perception of scientific data. The visuo-haptic interface allows users to interactively explore scalar, vector, and tensor fields. Their findings suggest that haptic data rendering, when presented as a companion to the visual rendering, helps users to understand the underlying patterns of the presented data more clearly. Ikits and Brederson [16] presented the Visual Haptic Workbench, which is
3 integrated immersive visual and haptic system for scientific data exploration. In the cited work, the authors augmented the visual sensory-channel with the haptic interaction and therefore made the information exchange more efficient by increasing the sensory bandwidth. Compared with the desktop zspace tablet, which was used in the present study, the haptic workbench is a larger system and prone to tracking problems due to the underlying magnetic tracking infrastructure. Ikits and Brederson presented several scientific data visualization methods, and identified the quantitative analysis of the usability of their visualization methods as possible future work. 3. Experiments Used in the Quantitative Assessment of Coupling Haptics with Virtual Holography 3.1. Scope and objective of experiments In the present study a quantitative assessment is made of the times required to complete spatial manipulation tasks in virtual environments. The tasks involved using a stylus-based haptic device to simulate the use of the robotic arm of a Martian rover in moving rocks from one location to another. The haptic device was used for manipulating 3D objects in the virtual environment (i.e., moving the rocks). No force-feedback capabilities were used in the experiments. Two display techniques were used, namely visualization of the 3D scene on a regular 2D computer display, and a 3D stereoscopic virtual holography display of the scene on a zspace tablet. The objective of the experiments is to investigate the effect of the used display technique on the time required to perform the task. Although the task completion time using the virtual holography tablet display was expected to be less than that using 2D display, however, the experiment aimed at quantifying the resulting improvement from the additional depth cues introduced by the virtual holography 3D display for a broad spectrum of users Experiment Setup zspace Virtual Holography Tablet Depth perception process takes advantage of several depth cues that are classified into two main categories: binocular depth cues and monocular depth cues [17, 18]. Binocular parallax [19], is the most commonly used depth cue in current consumer stereoscopic displays. This depth cue works by presenting slightly off-set images to both eyes of the viewer, and lets the brain infer the depth information as it naturally does. Motion parallax is used extensively in one's daily life [20]. It helps in inferring depth information by using the simple relationship between the distance of the object and its relative speed with respect to the viewer. For objects moving in the viewer s coordinate system, the ones that are closer to the viewer seem to be moving greater distances than the objects that are farther away from the viewer. This fact is inherently used by the brain to infer depth information in such scenes. The zspace tablet enhances the 3D immersion by providing full motion parallax in addition to the binocular parallax depth cue. This is achieved by infrared cameras that are embedded inside
4 the tablet. These cameras continuously track the viewing angle of the user and adjust the 3D perspective of the virtual environment according to the user's vantage point. The infrared reflective markers are located on the lightweight polarized passive 3D eyewear. The display of the tablet is a 24 inch, high-definition (1080p, 120Hz) 3D monitor with full resolution images rendered for each eye (Figure 2). The zspace tablet also comes with a custom stylus, whose position and orientation are continuously tracked by the tablet. Although, the uniquely designed stylus is the main tool for managing all interactions in 3D space, an extensive collection of software libraries, and the development platform, allow developers to build their own tools, extensions, and applications and to integrate custom input devices to the zspace tablet. The zspace tablet connects to a computer as an external display and allows the user to enable / disable stereoscopic rendering. This functionality allowed the performance of the experiment with the two levels of visualization on the same hardware setup Phantom OMNI Haptic Device Haptic interfaces operate on the sense of touch in two ways. Tactile method handles the simulation of surface properties such as roughness, smoothness, and temperature. Force feedback method, on the other hand, enables the users to explore, manipulate, and modify remote/virtual objects in three dimensions, and to receive reaction forces through the actuators of the haptic device. In this study, the Omni model from the Sensable Technologies PHANTOM product line was used as the haptic interface - a 3D input mechanism (Figure 3). The PHANTOM Omni device can track its stylus in six degrees-of-freedom, providing high precision and high resolution location and orientation data. The device can handle sub-millimeter (0.055 mm) position resolution [21], which is more than sufficient for the experiments in the present study. The software development kit (OpenHaptics toolkit), which comes with the PHANTOM Omni allows developing custom applications that utilize the haptic capabilities of the hardware Hardware Setup The zspace tablet was placed on a flat surface at its default 30 degrees standing configuration. The PHANTOM Omni device was located in front of the zspace tablet facing towards the tablet in order to match the haptic arm kinematic chain to the virtual robot arm kinematic chain (Figure 4). The subjects in the experiment held the stylus in a vertical position and moved the haptic arm as if they were controlling the remote robotic arm Subjects and Experimental Procedure
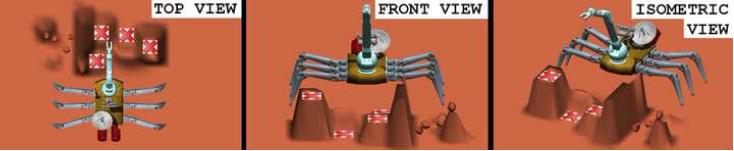
5 Thirty-two subjects volunteered to participate in this study. The subjects ranged in age from 7 years to 30 years and in education from elementary school to post-graduate students. The age distribution of the participants is clumped at late teens and early twenties. The experiments were organized and supervised by the same person. Consents for participation were obtained from all subjects before the experiments. Each subject performed the experiment for the two display techniques. In order to avoid the biasing due to the prior learning, the starting display technique was randomly chosen with equal probability for each of the subjects. The subjects were first introduced to the equipment through a simple tutorial scene that involves haptic interaction input, and then the procedure that they need to follow in the experiment was described clearly. The subjects were also informed verbally that their performances were being recorded in terms of the time it takes to complete the task. For each of the two display techniques, the task completion times were recorded, and later postprocessed using mathematical statistical packages Virtual Experiment Environment One of the mostly used models in human-computer interaction is Fitts's law [22]. It uses an empirical model to predict the time required for rapid aimed movements, and can be used to model a pointing task in both 2D and 3D. In order to engage the participants, the standardized point-to-point transfer tasks were modified as an extraterrestrial robotic mission (Figure 5). On a terrain with multiple obstacles, the tasks were chosen as moving four sample rocks from their original locations to preselected target locations. Target locations were designated by large X marks. The transfer operations of the rocks were completed as soon as they touched the target locations. Several obstacles with different heights, between the initial and final locations of the rocks, served as additional test involving the depth perception for the participants (Figure 6). In case the subjects hit any obstacle with the robot arm, they were alerted with audio-visual cues in order to discourage them from passing the virtual arm through the obstacles. For each participant, the times were recorded between picking up the first rock from its initial location and completing the entire set of tasks by placing the last rock at its target location Results and Statistical Analysis The data obtained from the experiments for the two display techniques was grouped into two sets. The box-whisker chart of the data showed two extreme, and one questionable outliers, in the 3D stereoscopic virtual holography display data set (Figure 7). These three data points were in agreement with the authors observations and notes about the subjects of the experiments, who were distracted by external stimuli. The three data points were removed from further statistical analysis. The data sets pertaining to the 2D and 3D stereoscopic displays were first compared with the Fisher s test to see if their precisions were similar or not. The two sided Fisher s
6 showed that the standard deviations of the two sets were similar, which means that they can be comparable with Student s T-test [23]. For the null hypothesis being the similarity of the two data sets, the Student s two tailed T-test was applied. The calculated T-test statistic ( ) and the corresponding p-value ( ) suggest that the task completion times obtained from the 3D stereoscopic virtual holography display is significantly different (lower) than the task completion times obtained from the 2D display. On the average, the time spent for the performance of the tasks with the virtual holography display was about 25% lower than that with the 2D display. 4. Concluding Remarks A quantitative assessment is made of using two display techniques, in conjunction with haptic interaction, for manipulating 3D objects in virtual environments. The two display techniques are 2D and 3D stereoscopic virtual holography tablet display. An experiment was conducted, in which subjects were asked to perform selected point-to-point transfer tasks using the two different display techniques. As expected, the use of 3D stereoscopic virtual holography display resulted in faster performance of the tasks. The improvement in performance is more pronounced for the experiment cases wherein a sharper depth perception was required. The interactive stereoscopic virtual holography zspace display allows users to look around the 3D objects in an intuitive way, and this important functionality improved the task performance when the objects were occluded by each other. The subjects also identified some additional advantages of the 3D stereoscopic virtual holography over the 2D display, including its intuitive nature and user friendliness. The positive effects were mostly noted by the younger subjects in the experiment (ages 15 to 24), who described themselves as computer savvy and have been active in computer gaming. The present study paves the way for more advanced studies of visuo-haptic coupling and its impact on mental/cognitive workload. It is also a step towards extending the work to study the effect of the synergistic-coupling of haptics with other modalities, such as brain-based interfaces, on the cognitive workload of the users. Acknowledgments The zspace tablets used in the present study were provided by zspace, Inc. to the authors through partnership with the ODU Center for Advanced Engineering Environments. 6. References [1] Kim S-C, Israr A, Poupyrev I. Tactile rendering of 3D features on touch surfaces. Proceedings of the 26th annual ACM symposium on User interface software and technology: ACM; p
7 [2] Sodhi R, Poupyrev I, Glisson M, Israr A. AIREAL: interactive tactile experiences in free air. ACM Transactions on Graphics (TOG). 2013;32:134. [3] Hoste L, Signer B. Water Ball Z: An Augmented Fighting Game Using Water as Tactile Feedback. [4] IEEE WHC 2013 Secretariat. IEEE World Haptics Conference [5] Harders M. EuroHaptics [6] ACM. UIST [7] Varalakshmi B, Thriveni J, KR V. Haptics: State of the Art Survey. International Journal of Computer Science Issues(IJCSI). 2012;9. [8] Coles TR, Meglan D, John NW. The role of haptics in medical training simulators: a survey of the state of the art. Haptics, IEEE Transactions on. 2011;4: [9] Roberts JC, Paneels S. Where are we with Haptic Visualization? EuroHaptics Conference, 2007 and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems World Haptics 2007 Second Joint: IEEE; p [10] Hoefer S. Meet The Tacit Project. It's Sonar For The Blind. [11] Nørretranders T. The user illusion: Cutting consciousness down to size: Viking; [12] Seaborn K, Riecke BE, Antle AN. Exploring the interplay of visual and haptic modalities in a pattern-matching task. Haptic Audio-Visual Environments and Games (HAVE), 2010 IEEE International Symposium on: IEEE; p [13] Lecuyer A, George L, Marchal M. Toward Adaptive VR Simulators Combining Visual, Haptic, and Brain-Computer Interfaces. Computer Graphics and Applications, IEEE. 2013;33: [14] Evreinova TV, Evreinov G, Raisamo R. Virtual Sectioning and Haptic Exploration of Volumetric Shapes in the Absence of Visual Feedback. Advances in Human-Computer Interaction. 2013;2013:15. [15] Lawrence DA, Pao LY, Lee CD, Novoselov RY. Synergistic visual/haptic rendering modes for scientific visualization. Computer Graphics and Applications, IEEE. 2004;24: [16] Ikits M, Brederson D. The Visual Haptic Workbench. The Visualization Handbook. 2005: [17] Howard IP, Rogers BJ. Perceiving in Depth, Volume 1: Basic Mechanisms: Oxford University Press; [18] Howard IP, Rogers BJ. Perceiving in Depth, Volume 2: Stereoscopic Vision: Oxford University Press; [19] Julesz B. Binocular Depth Perception of Computer Generated Patterns. Bell System Technical Journal. 1960;39: [20] Rogers B, Graham M. Motion parallax as an independent cue for depth perception. Perception. 1979;8: [21] Sensable. PHANTOM OMNI - Sensable [22] Fitts PM. The information capacity of the human motor system in controlling the amplitude of movement. Journal of experimental psychology. 1954;47:381. [23] Box JF. Guinness, Gosset, Fisher, and small samples. Statistical Science. 1987;2: [24] zspace I. zspace - revolutionary virtual-holographic computing [25] Quanser. A Simple Way To Build A Great Robotics Lab 2012.
8 Figure 1. Each sense sends information to the brain at a different capacity: sight (9.5 Mb/s), touch (0.95 Mb/s), hearing and smell (0.095 Mb/s), and taste ( MB/s). Figure 2. The zspace tablet and the custom interaction stylus [24]. Figure 3. The PHANTOM Omni device used in our experiments [25]. Figure 4. The PHANTOM Omni device is placed in front of the zspace tablet facing towards the tablet to match the kinematic chain of the controlled virtual robotic arm. Both the haptic interface and the zspace tablet are connected to the controller computer that runs the experiment and controls the virtual environment. Figure 5. Experiment subjects view the extraterrestrial robot from behind as in a third person view. They control the robot arm of the virtual robot with the haptic device to pick up objects from the original locations and drop them off at their target locations. Figure 6. The top, front, and isometric view of the virtual experiment. Figure 7. The box-whisker chart shows a comparison between the task completion times (in milliseconds) of the subjects for two levels of display technologies. The outlier data in the virtual holography display case are extreme cases wherein the subjects were either interrupted or distracted.
9


10

11
12
MECHANICAL DESIGN LEARNING ENVIRONMENTS BASED ON VIRTUAL REALITY TECHNOLOGIES
 INTERNATIONAL CONFERENCE ON ENGINEERING AND PRODUCT DESIGN EDUCATION 4 & 5 SEPTEMBER 2008, UNIVERSITAT POLITECNICA DE CATALUNYA, BARCELONA, SPAIN MECHANICAL DESIGN LEARNING ENVIRONMENTS BASED ON VIRTUAL
INTERNATIONAL CONFERENCE ON ENGINEERING AND PRODUCT DESIGN EDUCATION 4 & 5 SEPTEMBER 2008, UNIVERSITAT POLITECNICA DE CATALUNYA, BARCELONA, SPAIN MECHANICAL DESIGN LEARNING ENVIRONMENTS BASED ON VIRTUAL
Computer Haptics and Applications
 Computer Haptics and Applications EURON Summer School 2003 Cagatay Basdogan, Ph.D. College of Engineering Koc University, Istanbul, 80910 (http://network.ku.edu.tr/~cbasdogan) Resources: EURON Summer School
Computer Haptics and Applications EURON Summer School 2003 Cagatay Basdogan, Ph.D. College of Engineering Koc University, Istanbul, 80910 (http://network.ku.edu.tr/~cbasdogan) Resources: EURON Summer School
VIRTUAL REALITY Introduction. Emil M. Petriu SITE, University of Ottawa
 VIRTUAL REALITY Introduction Emil M. Petriu SITE, University of Ottawa Natural and Virtual Reality Virtual Reality Interactive Virtual Reality Virtualized Reality Augmented Reality HUMAN PERCEPTION OF
VIRTUAL REALITY Introduction Emil M. Petriu SITE, University of Ottawa Natural and Virtual Reality Virtual Reality Interactive Virtual Reality Virtualized Reality Augmented Reality HUMAN PERCEPTION OF
Haptic presentation of 3D objects in virtual reality for the visually disabled
 Haptic presentation of 3D objects in virtual reality for the visually disabled M Moranski, A Materka Institute of Electronics, Technical University of Lodz, Wolczanska 211/215, Lodz, POLAND marcin.moranski@p.lodz.pl,
Haptic presentation of 3D objects in virtual reality for the visually disabled M Moranski, A Materka Institute of Electronics, Technical University of Lodz, Wolczanska 211/215, Lodz, POLAND marcin.moranski@p.lodz.pl,
Discrimination of Virtual Haptic Textures Rendered with Different Update Rates
 Discrimination of Virtual Haptic Textures Rendered with Different Update Rates Seungmoon Choi and Hong Z. Tan Haptic Interface Research Laboratory Purdue University 465 Northwestern Avenue West Lafayette,
Discrimination of Virtual Haptic Textures Rendered with Different Update Rates Seungmoon Choi and Hong Z. Tan Haptic Interface Research Laboratory Purdue University 465 Northwestern Avenue West Lafayette,
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics
 Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
Differences in Fitts Law Task Performance Based on Environment Scaling
 Differences in Fitts Law Task Performance Based on Environment Scaling Gregory S. Lee and Bhavani Thuraisingham Department of Computer Science University of Texas at Dallas 800 West Campbell Road Richardson,
Differences in Fitts Law Task Performance Based on Environment Scaling Gregory S. Lee and Bhavani Thuraisingham Department of Computer Science University of Texas at Dallas 800 West Campbell Road Richardson,
Beyond Visual: Shape, Haptics and Actuation in 3D UI
 Beyond Visual: Shape, Haptics and Actuation in 3D UI Ivan Poupyrev Welcome, Introduction, & Roadmap 3D UIs 101 3D UIs 201 User Studies and 3D UIs Guidelines for Developing 3D UIs Video Games: 3D UIs for
Beyond Visual: Shape, Haptics and Actuation in 3D UI Ivan Poupyrev Welcome, Introduction, & Roadmap 3D UIs 101 3D UIs 201 User Studies and 3D UIs Guidelines for Developing 3D UIs Video Games: 3D UIs for
Comparing Two Haptic Interfaces for Multimodal Graph Rendering
 Comparing Two Haptic Interfaces for Multimodal Graph Rendering Wai Yu, Stephen Brewster Glasgow Interactive Systems Group, Department of Computing Science, University of Glasgow, U. K. {rayu, stephen}@dcs.gla.ac.uk,
Comparing Two Haptic Interfaces for Multimodal Graph Rendering Wai Yu, Stephen Brewster Glasgow Interactive Systems Group, Department of Computing Science, University of Glasgow, U. K. {rayu, stephen}@dcs.gla.ac.uk,
Feelable User Interfaces: An Exploration of Non-Visual Tangible User Interfaces
 Feelable User Interfaces: An Exploration of Non-Visual Tangible User Interfaces Katrin Wolf Telekom Innovation Laboratories TU Berlin, Germany katrin.wolf@acm.org Peter Bennett Interaction and Graphics
Feelable User Interfaces: An Exploration of Non-Visual Tangible User Interfaces Katrin Wolf Telekom Innovation Laboratories TU Berlin, Germany katrin.wolf@acm.org Peter Bennett Interaction and Graphics
Haptic Cueing of a Visual Change-Detection Task: Implications for Multimodal Interfaces
 In Usability Evaluation and Interface Design: Cognitive Engineering, Intelligent Agents and Virtual Reality (Vol. 1 of the Proceedings of the 9th International Conference on Human-Computer Interaction),
In Usability Evaluation and Interface Design: Cognitive Engineering, Intelligent Agents and Virtual Reality (Vol. 1 of the Proceedings of the 9th International Conference on Human-Computer Interaction),
The Effect of Haptic Feedback on Basic Social Interaction within Shared Virtual Environments
 The Effect of Haptic Feedback on Basic Social Interaction within Shared Virtual Environments Elias Giannopoulos 1, Victor Eslava 2, María Oyarzabal 2, Teresa Hierro 2, Laura González 2, Manuel Ferre 2,
The Effect of Haptic Feedback on Basic Social Interaction within Shared Virtual Environments Elias Giannopoulos 1, Victor Eslava 2, María Oyarzabal 2, Teresa Hierro 2, Laura González 2, Manuel Ferre 2,
Practical Data Visualization and Virtual Reality. Virtual Reality VR Display Systems. Karljohan Lundin Palmerius
 Practical Data Visualization and Virtual Reality Virtual Reality VR Display Systems Karljohan Lundin Palmerius Synopsis Virtual Reality basics Common display systems Visual modality Sound modality Interaction
Practical Data Visualization and Virtual Reality Virtual Reality VR Display Systems Karljohan Lundin Palmerius Synopsis Virtual Reality basics Common display systems Visual modality Sound modality Interaction
E90 Project Proposal. 6 December 2006 Paul Azunre Thomas Murray David Wright
 E90 Project Proposal 6 December 2006 Paul Azunre Thomas Murray David Wright Table of Contents Abstract 3 Introduction..4 Technical Discussion...4 Tracking Input..4 Haptic Feedack.6 Project Implementation....7
E90 Project Proposal 6 December 2006 Paul Azunre Thomas Murray David Wright Table of Contents Abstract 3 Introduction..4 Technical Discussion...4 Tracking Input..4 Haptic Feedack.6 Project Implementation....7
Toward Principles for Visual Interaction Design for Communicating Weight by using Pseudo-Haptic Feedback
 Toward Principles for Visual Interaction Design for Communicating Weight by using Pseudo-Haptic Feedback Kumiyo Nakakoji Key Technology Laboratory SRA Inc. 2-32-8 Minami-Ikebukuro, Toshima, Tokyo, 171-8513,
Toward Principles for Visual Interaction Design for Communicating Weight by using Pseudo-Haptic Feedback Kumiyo Nakakoji Key Technology Laboratory SRA Inc. 2-32-8 Minami-Ikebukuro, Toshima, Tokyo, 171-8513,
Using Real Objects for Interaction Tasks in Immersive Virtual Environments
 Using Objects for Interaction Tasks in Immersive Virtual Environments Andy Boud, Dr. VR Solutions Pty. Ltd. andyb@vrsolutions.com.au Abstract. The use of immersive virtual environments for industrial applications
Using Objects for Interaction Tasks in Immersive Virtual Environments Andy Boud, Dr. VR Solutions Pty. Ltd. andyb@vrsolutions.com.au Abstract. The use of immersive virtual environments for industrial applications
Haptics CS327A
 Haptics CS327A - 217 hap tic adjective relating to the sense of touch or to the perception and manipulation of objects using the senses of touch and proprioception 1 2 Slave Master 3 Courtesy of Walischmiller
Haptics CS327A - 217 hap tic adjective relating to the sense of touch or to the perception and manipulation of objects using the senses of touch and proprioception 1 2 Slave Master 3 Courtesy of Walischmiller
2. Introduction to Computer Haptics
 2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
Quantification of the Effects of Haptic Feedback During a Motor Skills Task in a Simulated Environment
 Quantification of the Effects of Haptic Feedback During a Motor Skills Task in a Simulated Environment Steven A. Wall and William S. Harwin The Department of Cybernetics, University of Reading, Whiteknights,
Quantification of the Effects of Haptic Feedback During a Motor Skills Task in a Simulated Environment Steven A. Wall and William S. Harwin The Department of Cybernetics, University of Reading, Whiteknights,
Haplug: A Haptic Plug for Dynamic VR Interactions
 Haplug: A Haptic Plug for Dynamic VR Interactions Nobuhisa Hanamitsu *, Ali Israr Disney Research, USA nobuhisa.hanamitsu@disneyresearch.com Abstract. We demonstrate applications of a new actuator, the
Haplug: A Haptic Plug for Dynamic VR Interactions Nobuhisa Hanamitsu *, Ali Israr Disney Research, USA nobuhisa.hanamitsu@disneyresearch.com Abstract. We demonstrate applications of a new actuator, the
Comparison of Haptic and Non-Speech Audio Feedback
 Comparison of Haptic and Non-Speech Audio Feedback Cagatay Goncu 1 and Kim Marriott 1 Monash University, Mebourne, Australia, cagatay.goncu@monash.edu, kim.marriott@monash.edu Abstract. We report a usability
Comparison of Haptic and Non-Speech Audio Feedback Cagatay Goncu 1 and Kim Marriott 1 Monash University, Mebourne, Australia, cagatay.goncu@monash.edu, kim.marriott@monash.edu Abstract. We report a usability
2 Outline of Ultra-Realistic Communication Research
 2 Outline of Ultra-Realistic Communication Research NICT is conducting research on Ultra-realistic communication since April in 2006. In this research, we are aiming at creating natural and realistic communication
2 Outline of Ultra-Realistic Communication Research NICT is conducting research on Ultra-realistic communication since April in 2006. In this research, we are aiming at creating natural and realistic communication
Human Factors. We take a closer look at the human factors that affect how people interact with computers and software:
 Human Factors We take a closer look at the human factors that affect how people interact with computers and software: Physiology physical make-up, capabilities Cognition thinking, reasoning, problem-solving,
Human Factors We take a closer look at the human factors that affect how people interact with computers and software: Physiology physical make-up, capabilities Cognition thinking, reasoning, problem-solving,
Perception. Read: AIMA Chapter 24 & Chapter HW#8 due today. Vision
 11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
Benefits of using haptic devices in textile architecture
 28 September 2 October 2009, Universidad Politecnica de Valencia, Spain Alberto DOMINGO and Carlos LAZARO (eds.) Benefits of using haptic devices in textile architecture Javier SANCHEZ *, Joan SAVALL a
28 September 2 October 2009, Universidad Politecnica de Valencia, Spain Alberto DOMINGO and Carlos LAZARO (eds.) Benefits of using haptic devices in textile architecture Javier SANCHEZ *, Joan SAVALL a
Free-Space Haptic Feedback for 3D Displays via Air-Vortex Rings
 Free-Space Haptic Feedback for 3D Displays via Air-Vortex Rings Ali Shtarbanov MIT Media Lab 20 Ames Street Cambridge, MA 02139 alims@media.mit.edu V. Michael Bove Jr. MIT Media Lab 20 Ames Street Cambridge,
Free-Space Haptic Feedback for 3D Displays via Air-Vortex Rings Ali Shtarbanov MIT Media Lab 20 Ames Street Cambridge, MA 02139 alims@media.mit.edu V. Michael Bove Jr. MIT Media Lab 20 Ames Street Cambridge,
Interactive Simulation: UCF EIN5255. VR Software. Audio Output. Page 4-1
 VR Software Class 4 Dr. Nabil Rami http://www.simulationfirst.com/ein5255/ Audio Output Can be divided into two elements: Audio Generation Audio Presentation Page 4-1 Audio Generation A variety of audio
VR Software Class 4 Dr. Nabil Rami http://www.simulationfirst.com/ein5255/ Audio Output Can be divided into two elements: Audio Generation Audio Presentation Page 4-1 Audio Generation A variety of audio
Application of 3D Terrain Representation System for Highway Landscape Design
 Application of 3D Terrain Representation System for Highway Landscape Design Koji Makanae Miyagi University, Japan Nashwan Dawood Teesside University, UK Abstract In recent years, mixed or/and augmented
Application of 3D Terrain Representation System for Highway Landscape Design Koji Makanae Miyagi University, Japan Nashwan Dawood Teesside University, UK Abstract In recent years, mixed or/and augmented
Realtime 3D Computer Graphics Virtual Reality
 Realtime 3D Computer Graphics Virtual Reality Marc Erich Latoschik AI & VR Lab Artificial Intelligence Group University of Bielefeld Virtual Reality (or VR for short) Virtual Reality (or VR for short)
Realtime 3D Computer Graphics Virtual Reality Marc Erich Latoschik AI & VR Lab Artificial Intelligence Group University of Bielefeld Virtual Reality (or VR for short) Virtual Reality (or VR for short)
Peter Berkelman. ACHI/DigitalWorld
 Magnetic Levitation Haptic Peter Berkelman ACHI/DigitalWorld February 25, 2013 Outline: Haptics - Force Feedback Sample devices: Phantoms, Novint Falcon, Force Dimension Inertia, friction, hysteresis/backlash
Magnetic Levitation Haptic Peter Berkelman ACHI/DigitalWorld February 25, 2013 Outline: Haptics - Force Feedback Sample devices: Phantoms, Novint Falcon, Force Dimension Inertia, friction, hysteresis/backlash
Booklet of teaching units
 International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
Haptic Holography/Touching the Ethereal
 Journal of Physics: Conference Series Haptic Holography/Touching the Ethereal To cite this article: Michael Page 2013 J. Phys.: Conf. Ser. 415 012041 View the article online for updates and enhancements.
Journal of Physics: Conference Series Haptic Holography/Touching the Ethereal To cite this article: Michael Page 2013 J. Phys.: Conf. Ser. 415 012041 View the article online for updates and enhancements.
Novel machine interface for scaled telesurgery
 Novel machine interface for scaled telesurgery S. Clanton, D. Wang, Y. Matsuoka, D. Shelton, G. Stetten SPIE Medical Imaging, vol. 5367, pp. 697-704. San Diego, Feb. 2004. A Novel Machine Interface for
Novel machine interface for scaled telesurgery S. Clanton, D. Wang, Y. Matsuoka, D. Shelton, G. Stetten SPIE Medical Imaging, vol. 5367, pp. 697-704. San Diego, Feb. 2004. A Novel Machine Interface for
Sound rendering in Interactive Multimodal Systems. Federico Avanzini
 Sound rendering in Interactive Multimodal Systems Federico Avanzini Background Outline Ecological Acoustics Multimodal perception Auditory visual rendering of egocentric distance Binaural sound Auditory
Sound rendering in Interactive Multimodal Systems Federico Avanzini Background Outline Ecological Acoustics Multimodal perception Auditory visual rendering of egocentric distance Binaural sound Auditory
The Mixed Reality Book: A New Multimedia Reading Experience
 The Mixed Reality Book: A New Multimedia Reading Experience Raphaël Grasset raphael.grasset@hitlabnz.org Andreas Dünser andreas.duenser@hitlabnz.org Mark Billinghurst mark.billinghurst@hitlabnz.org Hartmut
The Mixed Reality Book: A New Multimedia Reading Experience Raphaël Grasset raphael.grasset@hitlabnz.org Andreas Dünser andreas.duenser@hitlabnz.org Mark Billinghurst mark.billinghurst@hitlabnz.org Hartmut
Designing Pseudo-Haptic Feedback Mechanisms for Communicating Weight in Decision Making Tasks
 Appeared in the Proceedings of Shikakeology: Designing Triggers for Behavior Change, AAAI Spring Symposium Series 2013 Technical Report SS-12-06, pp.107-112, Palo Alto, CA., March 2013. Designing Pseudo-Haptic
Appeared in the Proceedings of Shikakeology: Designing Triggers for Behavior Change, AAAI Spring Symposium Series 2013 Technical Report SS-12-06, pp.107-112, Palo Alto, CA., March 2013. Designing Pseudo-Haptic
Evaluation of Haptic Virtual Fixtures in Psychomotor Skill Development for Robotic Surgical Training
 Department of Electronics, Information and Bioengineering Neuroengineering and medical robotics Lab Evaluation of Haptic Virtual Fixtures in Psychomotor Skill Development for Robotic Surgical Training
Department of Electronics, Information and Bioengineering Neuroengineering and medical robotics Lab Evaluation of Haptic Virtual Fixtures in Psychomotor Skill Development for Robotic Surgical Training
Collaboration in Multimodal Virtual Environments
 Collaboration in Multimodal Virtual Environments Eva-Lotta Sallnäs NADA, Royal Institute of Technology evalotta@nada.kth.se http://www.nada.kth.se/~evalotta/ Research question How is collaboration in a
Collaboration in Multimodal Virtual Environments Eva-Lotta Sallnäs NADA, Royal Institute of Technology evalotta@nada.kth.se http://www.nada.kth.se/~evalotta/ Research question How is collaboration in a
Issues and Challenges of 3D User Interfaces: Effects of Distraction
 Issues and Challenges of 3D User Interfaces: Effects of Distraction Leslie Klein kleinl@in.tum.de In time critical tasks like when driving a car or in emergency management, 3D user interfaces provide an
Issues and Challenges of 3D User Interfaces: Effects of Distraction Leslie Klein kleinl@in.tum.de In time critical tasks like when driving a car or in emergency management, 3D user interfaces provide an
preface Motivation Figure 1. Reality-virtuality continuum (Milgram & Kishino, 1994) Mixed.Reality Augmented. Virtuality Real...
 Mixed.Reality Augmented. Virtuality Real...") v preface Motivation Augmented reality (AR) research aims to develop technologies that allow the real-time fusion of computer-generated digital content with the real world. Unlike virtual reality (VR)
v preface Motivation Augmented reality (AR) research aims to develop technologies that allow the real-time fusion of computer-generated digital content with the real world. Unlike virtual reality (VR)
Exploring Surround Haptics Displays
 Exploring Surround Haptics Displays Ali Israr Disney Research 4615 Forbes Ave. Suite 420, Pittsburgh, PA 15213 USA israr@disneyresearch.com Ivan Poupyrev Disney Research 4615 Forbes Ave. Suite 420, Pittsburgh,
Exploring Surround Haptics Displays Ali Israr Disney Research 4615 Forbes Ave. Suite 420, Pittsburgh, PA 15213 USA israr@disneyresearch.com Ivan Poupyrev Disney Research 4615 Forbes Ave. Suite 420, Pittsburgh,
Welcome to this course on «Natural Interactive Walking on Virtual Grounds»!
 Welcome to this course on «Natural Interactive Walking on Virtual Grounds»! The speaker is Anatole Lécuyer, senior researcher at Inria, Rennes, France; More information about him at : http://people.rennes.inria.fr/anatole.lecuyer/
Welcome to this course on «Natural Interactive Walking on Virtual Grounds»! The speaker is Anatole Lécuyer, senior researcher at Inria, Rennes, France; More information about him at : http://people.rennes.inria.fr/anatole.lecuyer/
Feeding human senses through Immersion
 Virtual Reality Feeding human senses through Immersion 1. How many human senses? 2. Overview of key human senses 3. Sensory stimulation through Immersion 4. Conclusion Th3.1 1. How many human senses? [TRV
Virtual Reality Feeding human senses through Immersion 1. How many human senses? 2. Overview of key human senses 3. Sensory stimulation through Immersion 4. Conclusion Th3.1 1. How many human senses? [TRV
Cody Narber, M.S. Department of Computer Science, George Mason University
 Cody Narber, M.S. cnarber@gmu.edu Department of Computer Science, George Mason University Lynn Gerber, MD Professor, College of Health and Human Services Director, Center for the Study of Chronic Illness
Cody Narber, M.S. cnarber@gmu.edu Department of Computer Science, George Mason University Lynn Gerber, MD Professor, College of Health and Human Services Director, Center for the Study of Chronic Illness
VR based HCI Techniques & Application. November 29, 2002
 VR based HCI Techniques & Application November 29, 2002 stefan.seipel@hci.uu.se What is Virtual Reality? Coates (1992): Virtual Reality is electronic simulations of environments experienced via head mounted
VR based HCI Techniques & Application November 29, 2002 stefan.seipel@hci.uu.se What is Virtual Reality? Coates (1992): Virtual Reality is electronic simulations of environments experienced via head mounted
Haptic holography/touching the ethereal Page, Michael
 OCAD University Open Research Repository Faculty of Design 2013 Haptic holography/touching the ethereal Page, Michael Suggested citation: Page, Michael (2013) Haptic holography/touching the ethereal. Journal
OCAD University Open Research Repository Faculty of Design 2013 Haptic holography/touching the ethereal Page, Michael Suggested citation: Page, Michael (2013) Haptic holography/touching the ethereal. Journal
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
VIEW: Visual Interactive Effective Worlds Lorentz Center International Center for workshops in the Sciences June Dr.
 Virtual Reality & Presence VIEW: Visual Interactive Effective Worlds Lorentz Center International Center for workshops in the Sciences 25-27 June 2007 Dr. Frederic Vexo Virtual Reality & Presence Outline:
Virtual Reality & Presence VIEW: Visual Interactive Effective Worlds Lorentz Center International Center for workshops in the Sciences 25-27 June 2007 Dr. Frederic Vexo Virtual Reality & Presence Outline:
Virtual Chromatic Percussions Simulated by Pseudo-Haptic and Vibrotactile Feedback
 Virtual Chromatic Percussions Simulated by Pseudo-Haptic and Vibrotactile Feedback Taku Hachisu The University of Electro- Communications 1-5-1 Chofugaoka, Chofu, Tokyo 182-8585, Japan +81 42 443 5363
Virtual Chromatic Percussions Simulated by Pseudo-Haptic and Vibrotactile Feedback Taku Hachisu The University of Electro- Communications 1-5-1 Chofugaoka, Chofu, Tokyo 182-8585, Japan +81 42 443 5363
DepthTouch: Using Depth-Sensing Camera to Enable Freehand Interactions On and Above the Interactive Surface
 DepthTouch: Using Depth-Sensing Camera to Enable Freehand Interactions On and Above the Interactive Surface Hrvoje Benko and Andrew D. Wilson Microsoft Research One Microsoft Way Redmond, WA 98052, USA
DepthTouch: Using Depth-Sensing Camera to Enable Freehand Interactions On and Above the Interactive Surface Hrvoje Benko and Andrew D. Wilson Microsoft Research One Microsoft Way Redmond, WA 98052, USA
Abdulmotaleb El Saddik Associate Professor Dr.-Ing., SMIEEE, P.Eng.
 Abdulmotaleb El Saddik Associate Professor Dr.-Ing., SMIEEE, P.Eng. Multimedia Communications Research Laboratory University of Ottawa Ontario Research Network of E-Commerce www.mcrlab.uottawa.ca abed@mcrlab.uottawa.ca
Abdulmotaleb El Saddik Associate Professor Dr.-Ing., SMIEEE, P.Eng. Multimedia Communications Research Laboratory University of Ottawa Ontario Research Network of E-Commerce www.mcrlab.uottawa.ca abed@mcrlab.uottawa.ca
PERFORMANCE IN A HAPTIC ENVIRONMENT ABSTRACT
 PERFORMANCE IN A HAPTIC ENVIRONMENT Michael V. Doran,William Owen, and Brian Holbert University of South Alabama School of Computer and Information Sciences Mobile, Alabama 36688 (334) 460-6390 doran@cis.usouthal.edu,
PERFORMANCE IN A HAPTIC ENVIRONMENT Michael V. Doran,William Owen, and Brian Holbert University of South Alabama School of Computer and Information Sciences Mobile, Alabama 36688 (334) 460-6390 doran@cis.usouthal.edu,
A Brief Survey of HCI Technology. Lecture #3
 A Brief Survey of HCI Technology Lecture #3 Agenda Evolution of HCI Technology Computer side Human side Scope of HCI 2 HCI: Historical Perspective Primitive age Charles Babbage s computer Punch card Command
A Brief Survey of HCI Technology Lecture #3 Agenda Evolution of HCI Technology Computer side Human side Scope of HCI 2 HCI: Historical Perspective Primitive age Charles Babbage s computer Punch card Command
INDE/TC 455: User Interface Design
 INDE/TC 455: User Interface Design Module 13.0 Interface Technology 1 Three more interface considerations What is the best allocation of responsibility between the human and the tool? What is the best
INDE/TC 455: User Interface Design Module 13.0 Interface Technology 1 Three more interface considerations What is the best allocation of responsibility between the human and the tool? What is the best
From Encoding Sound to Encoding Touch
 From Encoding Sound to Encoding Touch Toktam Mahmoodi King s College London, UK http://www.ctr.kcl.ac.uk/toktam/index.htm ETSI STQ Workshop, May 2017 Immersing a person into the real environment with Very
From Encoding Sound to Encoding Touch Toktam Mahmoodi King s College London, UK http://www.ctr.kcl.ac.uk/toktam/index.htm ETSI STQ Workshop, May 2017 Immersing a person into the real environment with Very
Haptics and the User Interface
 Haptics and the User Interface based on slides from Karon MacLean, original slides available at: http://www.cs.ubc.ca/~maclean/publics/ what is haptic? from Greek haptesthai : to touch Haptic User Interfaces
Haptics and the User Interface based on slides from Karon MacLean, original slides available at: http://www.cs.ubc.ca/~maclean/publics/ what is haptic? from Greek haptesthai : to touch Haptic User Interfaces
Haptic Cues: Texture as a Guide for Non-Visual Tangible Interaction.
 Haptic Cues: Texture as a Guide for Non-Visual Tangible Interaction. Figure 1. Setup for exploring texture perception using a (1) black box (2) consisting of changeable top with laser-cut haptic cues,
Haptic Cues: Texture as a Guide for Non-Visual Tangible Interaction. Figure 1. Setup for exploring texture perception using a (1) black box (2) consisting of changeable top with laser-cut haptic cues,
An Introduction into Virtual Reality Environments. Stefan Seipel
 An Introduction into Virtual Reality Environments Stefan Seipel stefan.seipel@hig.se What is Virtual Reality? Technically defined: VR is a medium in terms of a collection of technical hardware (similar
An Introduction into Virtual Reality Environments Stefan Seipel stefan.seipel@hig.se What is Virtual Reality? Technically defined: VR is a medium in terms of a collection of technical hardware (similar
Interactive Virtual Environments
 Interactive Virtual Environments Introduction Emil M. Petriu, Dr. Eng., FIEEE Professor, School of Information Technology and Engineering University of Ottawa, Ottawa, ON, Canada http://www.site.uottawa.ca/~petriu
Interactive Virtual Environments Introduction Emil M. Petriu, Dr. Eng., FIEEE Professor, School of Information Technology and Engineering University of Ottawa, Ottawa, ON, Canada http://www.site.uottawa.ca/~petriu
What is Virtual Reality? What is Virtual Reality? An Introduction into Virtual Reality Environments. Stefan Seipel
 An Introduction into Virtual Reality Environments What is Virtual Reality? Technically defined: Stefan Seipel stefan.seipel@hig.se VR is a medium in terms of a collection of technical hardware (similar
An Introduction into Virtual Reality Environments What is Virtual Reality? Technically defined: Stefan Seipel stefan.seipel@hig.se VR is a medium in terms of a collection of technical hardware (similar
Chapter 1 Virtual World Fundamentals
 Chapter 1 Virtual World Fundamentals 1.0 What Is A Virtual World? {Definition} Virtual: to exist in effect, though not in actual fact. You are probably familiar with arcade games such as pinball and target
Chapter 1 Virtual World Fundamentals 1.0 What Is A Virtual World? {Definition} Virtual: to exist in effect, though not in actual fact. You are probably familiar with arcade games such as pinball and target
Yu, W. and Brewster, S.A. (2003) Evaluation of multimodal graphs for blind people. Universal Access in the Information Society 2(2):pp
 Evaluation of multimodal graphs for blind people. Universal Access in the Information Society 2(2):pp") Yu, W. and Brewster, S.A. (2003) Evaluation of multimodal graphs for blind people. Universal Access in the Information Society 2(2):pp. 105-124. http://eprints.gla.ac.uk/3273/ Glasgow eprints Service http://eprints.gla.ac.uk
Yu, W. and Brewster, S.A. (2003) Evaluation of multimodal graphs for blind people. Universal Access in the Information Society 2(2):pp. 105-124. http://eprints.gla.ac.uk/3273/ Glasgow eprints Service http://eprints.gla.ac.uk
Ubiquitous Computing Summer Episode 16: HCI. Hannes Frey and Peter Sturm University of Trier. Hannes Frey and Peter Sturm, University of Trier 1
 Episode 16: HCI Hannes Frey and Peter Sturm University of Trier University of Trier 1 Shrinking User Interface Small devices Narrow user interface Only few pixels graphical output No keyboard Mobility
Episode 16: HCI Hannes Frey and Peter Sturm University of Trier University of Trier 1 Shrinking User Interface Small devices Narrow user interface Only few pixels graphical output No keyboard Mobility
Interactive Multimedia Contents in the IllusionHole
 Interactive Multimedia Contents in the IllusionHole Tokuo Yamaguchi, Kazuhiro Asai, Yoshifumi Kitamura, and Fumio Kishino Graduate School of Information Science and Technology, Osaka University, 2-1 Yamada-oka,
Interactive Multimedia Contents in the IllusionHole Tokuo Yamaguchi, Kazuhiro Asai, Yoshifumi Kitamura, and Fumio Kishino Graduate School of Information Science and Technology, Osaka University, 2-1 Yamada-oka,
CS277 - Experimental Haptics Lecture 1. Introduction to Haptics
 CS277 - Experimental Haptics Lecture 1 Introduction to Haptics Haptic Interfaces Enables physical interaction with virtual objects Haptic Rendering Potential Fields Polygonal Meshes Implicit Surfaces Volumetric
CS277 - Experimental Haptics Lecture 1 Introduction to Haptics Haptic Interfaces Enables physical interaction with virtual objects Haptic Rendering Potential Fields Polygonal Meshes Implicit Surfaces Volumetric
3D interaction techniques in Virtual Reality Applications for Engineering Education
 3D interaction techniques in Virtual Reality Applications for Engineering Education Cristian Dudulean 1, Ionel Stareţu 2 (1) Industrial Highschool Rosenau, Romania E-mail: duduleanc@yahoo.com (2) Transylvania
3D interaction techniques in Virtual Reality Applications for Engineering Education Cristian Dudulean 1, Ionel Stareţu 2 (1) Industrial Highschool Rosenau, Romania E-mail: duduleanc@yahoo.com (2) Transylvania
Introduction to Haptics
 Introduction to Haptics Roope Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction (TAUCHI) Department of Computer Sciences University of Tampere, Finland Definition
Introduction to Haptics Roope Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction (TAUCHI) Department of Computer Sciences University of Tampere, Finland Definition
Touching and Walking: Issues in Haptic Interface
 Touching and Walking: Issues in Haptic Interface Hiroo Iwata 1 1 Institute of Engineering Mechanics and Systems, University of Tsukuba, 80, Tsukuba, 305-8573 Japan iwata@kz.tsukuba.ac.jp Abstract. This
Touching and Walking: Issues in Haptic Interface Hiroo Iwata 1 1 Institute of Engineering Mechanics and Systems, University of Tsukuba, 80, Tsukuba, 305-8573 Japan iwata@kz.tsukuba.ac.jp Abstract. This
HUMAN COMPUTER INTERFACE
 HUMAN COMPUTER INTERFACE TARUNIM SHARMA Department of Computer Science Maharaja Surajmal Institute C-4, Janakpuri, New Delhi, India ABSTRACT-- The intention of this paper is to provide an overview on the
HUMAN COMPUTER INTERFACE TARUNIM SHARMA Department of Computer Science Maharaja Surajmal Institute C-4, Janakpuri, New Delhi, India ABSTRACT-- The intention of this paper is to provide an overview on the
Texture recognition using force sensitive resistors
 Texture recognition using force sensitive resistors SAYED, Muhammad, DIAZ GARCIA,, Jose Carlos and ALBOUL, Lyuba Available from Sheffield Hallam University Research
Texture recognition using force sensitive resistors SAYED, Muhammad, DIAZ GARCIA,, Jose Carlos and ALBOUL, Lyuba Available from Sheffield Hallam University Research
International Journal of Advanced Research in Computer Science and Software Engineering
 Volume 3, Issue 3, March 2013 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com A Study on SensAble
Volume 3, Issue 3, March 2013 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com A Study on SensAble
CAPACITIES FOR TECHNOLOGY TRANSFER
 CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
Interacting within Virtual Worlds (based on talks by Greg Welch and Mark Mine)
") Interacting within Virtual Worlds (based on talks by Greg Welch and Mark Mine) Presentation Working in a virtual world Interaction principles Interaction examples Why VR in the First Place? Direct perception
Interacting within Virtual Worlds (based on talks by Greg Welch and Mark Mine) Presentation Working in a virtual world Interaction principles Interaction examples Why VR in the First Place? Direct perception
INDE/TC 455: User Interface Design
 INDE/TC 455: User Interface Design Autumn 2008 Class #21 URL:courses.washington.edu/ie455 1 TA Moment 2 Class #20 Review Review of flipbooks 3 Assignments for Class #22 Individual Review modules: 5.7,
INDE/TC 455: User Interface Design Autumn 2008 Class #21 URL:courses.washington.edu/ie455 1 TA Moment 2 Class #20 Review Review of flipbooks 3 Assignments for Class #22 Individual Review modules: 5.7,
Integrating PhysX and OpenHaptics: Efficient Force Feedback Generation Using Physics Engine and Haptic Devices
 This is the Pre-Published Version. Integrating PhysX and Opens: Efficient Force Feedback Generation Using Physics Engine and Devices 1 Leon Sze-Ho Chan 1, Kup-Sze Choi 1 School of Nursing, Hong Kong Polytechnic
This is the Pre-Published Version. Integrating PhysX and Opens: Efficient Force Feedback Generation Using Physics Engine and Devices 1 Leon Sze-Ho Chan 1, Kup-Sze Choi 1 School of Nursing, Hong Kong Polytechnic
Evaluation of Five-finger Haptic Communication with Network Delay
 Tactile Communication Haptic Communication Network Delay Evaluation of Five-finger Haptic Communication with Network Delay To realize tactile communication, we clarify some issues regarding how delay affects
Tactile Communication Haptic Communication Network Delay Evaluation of Five-finger Haptic Communication with Network Delay To realize tactile communication, we clarify some issues regarding how delay affects
3D Modelling Is Not For WIMPs Part II: Stylus/Mouse Clicks
 3D Modelling Is Not For WIMPs Part II: Stylus/Mouse Clicks David Gauldie 1, Mark Wright 2, Ann Marie Shillito 3 1,3 Edinburgh College of Art 79 Grassmarket, Edinburgh EH1 2HJ d.gauldie@eca.ac.uk, a.m.shillito@eca.ac.uk
3D Modelling Is Not For WIMPs Part II: Stylus/Mouse Clicks David Gauldie 1, Mark Wright 2, Ann Marie Shillito 3 1,3 Edinburgh College of Art 79 Grassmarket, Edinburgh EH1 2HJ d.gauldie@eca.ac.uk, a.m.shillito@eca.ac.uk
Sensing and Perception
 Unit D tion Exploring Robotics Spring, 2013 D.1 Why does a robot need sensors? the environment is complex the environment is dynamic enable the robot to learn about current conditions in its environment.
Unit D tion Exploring Robotics Spring, 2013 D.1 Why does a robot need sensors? the environment is complex the environment is dynamic enable the robot to learn about current conditions in its environment.
Perceptual Interfaces. Matthew Turk s (UCSB) and George G. Robertson s (Microsoft Research) slides on perceptual p interfaces
 and George G. Robertson s (Microsoft Research) slides on perceptual p interfaces") Perceptual Interfaces Adapted from Matthew Turk s (UCSB) and George G. Robertson s (Microsoft Research) slides on perceptual p interfaces Outline Why Perceptual Interfaces? Multimodal interfaces Vision
Perceptual Interfaces Adapted from Matthew Turk s (UCSB) and George G. Robertson s (Microsoft Research) slides on perceptual p interfaces Outline Why Perceptual Interfaces? Multimodal interfaces Vision
Haptic control in a virtual environment
 Haptic control in a virtual environment Gerard de Ruig (0555781) Lourens Visscher (0554498) Lydia van Well (0566644) September 10, 2010 Introduction With modern technological advancements it is entirely
Haptic control in a virtual environment Gerard de Ruig (0555781) Lourens Visscher (0554498) Lydia van Well (0566644) September 10, 2010 Introduction With modern technological advancements it is entirely
Immersive Natives. Die Zukunft der virtuellen Realität. Prof. Dr. Frank Steinicke. Human-Computer Interaction, Universität Hamburg
 Immersive Natives Die Zukunft der virtuellen Realität Prof. Dr. Frank Steinicke Human-Computer Interaction, Universität Hamburg Immersion Presence Place Illusion + Plausibility Illusion + Social Presence
Immersive Natives Die Zukunft der virtuellen Realität Prof. Dr. Frank Steinicke Human-Computer Interaction, Universität Hamburg Immersion Presence Place Illusion + Plausibility Illusion + Social Presence
Perception in Immersive Virtual Reality Environments ROB ALLISON DEPT. OF ELECTRICAL ENGINEERING AND COMPUTER SCIENCE YORK UNIVERSITY, TORONTO
 Perception in Immersive Virtual Reality Environments ROB ALLISON DEPT. OF ELECTRICAL ENGINEERING AND COMPUTER SCIENCE YORK UNIVERSITY, TORONTO Overview Basic concepts and ideas of virtual environments
Perception in Immersive Virtual Reality Environments ROB ALLISON DEPT. OF ELECTRICAL ENGINEERING AND COMPUTER SCIENCE YORK UNIVERSITY, TORONTO Overview Basic concepts and ideas of virtual environments
Haptic Rendering CPSC / Sonny Chan University of Calgary
 Haptic Rendering CPSC 599.86 / 601.86 Sonny Chan University of Calgary Today s Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering
Haptic Rendering CPSC 599.86 / 601.86 Sonny Chan University of Calgary Today s Outline Announcements Human haptic perception Anatomy of a visual-haptic simulation Virtual wall and potential field rendering
Exhibition Strategy of Digital 3D Data of Object in Archives using Digitally Mediated Technologies for High User Experience
 , pp.150-156 http://dx.doi.org/10.14257/astl.2016.140.29 Exhibition Strategy of Digital 3D Data of Object in Archives using Digitally Mediated Technologies for High User Experience Jaeho Ryu 1, Minsuk
, pp.150-156 http://dx.doi.org/10.14257/astl.2016.140.29 Exhibition Strategy of Digital 3D Data of Object in Archives using Digitally Mediated Technologies for High User Experience Jaeho Ryu 1, Minsuk
Evaluation of Visuo-haptic Feedback in a 3D Touch Panel Interface
 Evaluation of Visuo-haptic Feedback in a 3D Touch Panel Interface Xu Zhao Saitama University 255 Shimo-Okubo, Sakura-ku, Saitama City, Japan sheldonzhaox@is.ics.saitamau.ac.jp Takehiro Niikura The University
Evaluation of Visuo-haptic Feedback in a 3D Touch Panel Interface Xu Zhao Saitama University 255 Shimo-Okubo, Sakura-ku, Saitama City, Japan sheldonzhaox@is.ics.saitamau.ac.jp Takehiro Niikura The University
Virtual Environments. Ruth Aylett
 Virtual Environments Ruth Aylett Aims of the course 1. To demonstrate a critical understanding of modern VE systems, evaluating the strengths and weaknesses of the current VR technologies 2. To be able
Virtual Environments Ruth Aylett Aims of the course 1. To demonstrate a critical understanding of modern VE systems, evaluating the strengths and weaknesses of the current VR technologies 2. To be able
Figure 2. Haptic human perception and display. 2.2 Pseudo-Haptic Feedback 2. RELATED WORKS 2.1 Haptic Simulation of Tapping an Object
 Virtual Chromatic Percussions Simulated by Pseudo-Haptic and Vibrotactile Feedback Taku Hachisu 1 Gabriel Cirio 2 Maud Marchal 2 Anatole Lécuyer 2 Hiroyuki Kajimoto 1,3 1 The University of Electro- Communications
Virtual Chromatic Percussions Simulated by Pseudo-Haptic and Vibrotactile Feedback Taku Hachisu 1 Gabriel Cirio 2 Maud Marchal 2 Anatole Lécuyer 2 Hiroyuki Kajimoto 1,3 1 The University of Electro- Communications
Rendering Moving Tactile Stroke on the Palm Using a Sparse 2D Array
 Rendering Moving Tactile Stroke on the Palm Using a Sparse 2D Array Jaeyoung Park 1(&), Jaeha Kim 1, Yonghwan Oh 1, and Hong Z. Tan 2 1 Korea Institute of Science and Technology, Seoul, Korea {jypcubic,lithium81,oyh}@kist.re.kr
Rendering Moving Tactile Stroke on the Palm Using a Sparse 2D Array Jaeyoung Park 1(&), Jaeha Kim 1, Yonghwan Oh 1, and Hong Z. Tan 2 1 Korea Institute of Science and Technology, Seoul, Korea {jypcubic,lithium81,oyh}@kist.re.kr
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Multisensory Virtual Environment for Supporting Blind Persons' Acquisition of Spatial Cognitive Mapping a Case Study
 Multisensory Virtual Environment for Supporting Blind Persons' Acquisition of Spatial Cognitive Mapping a Case Study Orly Lahav & David Mioduser Tel Aviv University, School of Education Ramat-Aviv, Tel-Aviv,
Multisensory Virtual Environment for Supporting Blind Persons' Acquisition of Spatial Cognitive Mapping a Case Study Orly Lahav & David Mioduser Tel Aviv University, School of Education Ramat-Aviv, Tel-Aviv,
Haptics-Augmented Physics Simulation: Coriolis Effect
 Haptics-Augmented Physics Simulation: Coriolis Effect Felix G. Hamza-Lup, Benjamin Page Computer Science and Information Technology Armstrong Atlantic State University Savannah, GA 31419, USA E-mail: felix.hamza-lup@armstrong.edu
Haptics-Augmented Physics Simulation: Coriolis Effect Felix G. Hamza-Lup, Benjamin Page Computer Science and Information Technology Armstrong Atlantic State University Savannah, GA 31419, USA E-mail: felix.hamza-lup@armstrong.edu
What is Virtual Reality? What is Virtual Reality? An Introduction into Virtual Reality Environments
 An Introduction into Virtual Reality Environments What is Virtual Reality? Technically defined: Stefan Seipel, MDI Inst. f. Informationsteknologi stefan.seipel@hci.uu.se VR is a medium in terms of a collection
An Introduction into Virtual Reality Environments What is Virtual Reality? Technically defined: Stefan Seipel, MDI Inst. f. Informationsteknologi stefan.seipel@hci.uu.se VR is a medium in terms of a collection
Interior Design using Augmented Reality Environment
 Interior Design using Augmented Reality Environment Kalyani Pampattiwar 2, Akshay Adiyodi 1, Manasvini Agrahara 1, Pankaj Gamnani 1 Assistant Professor, Department of Computer Engineering, SIES Graduate
Interior Design using Augmented Reality Environment Kalyani Pampattiwar 2, Akshay Adiyodi 1, Manasvini Agrahara 1, Pankaj Gamnani 1 Assistant Professor, Department of Computer Engineering, SIES Graduate
Toward an Augmented Reality System for Violin Learning Support
 Toward an Augmented Reality System for Violin Learning Support Hiroyuki Shiino, François de Sorbier, and Hideo Saito Graduate School of Science and Technology, Keio University, Yokohama, Japan {shiino,fdesorbi,saito}@hvrl.ics.keio.ac.jp
Toward an Augmented Reality System for Violin Learning Support Hiroyuki Shiino, François de Sorbier, and Hideo Saito Graduate School of Science and Technology, Keio University, Yokohama, Japan {shiino,fdesorbi,saito}@hvrl.ics.keio.ac.jp
Running an HCI Experiment in Multiple Parallel Universes
 Author manuscript, published in "ACM CHI Conference on Human Factors in Computing Systems (alt.chi) (2014)" Running an HCI Experiment in Multiple Parallel Universes Univ. Paris Sud, CNRS, Univ. Paris Sud,
Author manuscript, published in "ACM CHI Conference on Human Factors in Computing Systems (alt.chi) (2014)" Running an HCI Experiment in Multiple Parallel Universes Univ. Paris Sud, CNRS, Univ. Paris Sud,
Modeling and Experimental Studies of a Novel 6DOF Haptic Device
 Proceedings of The Canadian Society for Mechanical Engineering Forum 2010 CSME FORUM 2010 June 7-9, 2010, Victoria, British Columbia, Canada Modeling and Experimental Studies of a Novel DOF Haptic Device
Proceedings of The Canadian Society for Mechanical Engineering Forum 2010 CSME FORUM 2010 June 7-9, 2010, Victoria, British Columbia, Canada Modeling and Experimental Studies of a Novel DOF Haptic Device
Design and Evaluation of Tactile Number Reading Methods on Smartphones
 Design and Evaluation of Tactile Number Reading Methods on Smartphones Fan Zhang fanzhang@zjicm.edu.cn Shaowei Chu chu@zjicm.edu.cn Naye Ji jinaye@zjicm.edu.cn Ruifang Pan ruifangp@zjicm.edu.cn Abstract
Design and Evaluation of Tactile Number Reading Methods on Smartphones Fan Zhang fanzhang@zjicm.edu.cn Shaowei Chu chu@zjicm.edu.cn Naye Ji jinaye@zjicm.edu.cn Ruifang Pan ruifangp@zjicm.edu.cn Abstract
Haptic Rendering and Volumetric Visualization with SenSitus
 Haptic Rendering and Volumetric Visualization with SenSitus Stefan Birmanns, Ph.D. Department of Molecular Biology The Scripps Research Institute 10550 N. Torrey Pines Road, Mail TPC6 La Jolla, California,
Haptic Rendering and Volumetric Visualization with SenSitus Stefan Birmanns, Ph.D. Department of Molecular Biology The Scripps Research Institute 10550 N. Torrey Pines Road, Mail TPC6 La Jolla, California,
Sensors & Systems for Human Safety Assurance in Collaborative Exploration
 Sensing and Sensors CMU SCS RI 16-722 S09 Ned Fox nfox@andrew.cmu.edu Outline What is collaborative exploration? Humans sensing robots Robots sensing humans Overseers sensing both Inherently safe systems
Sensing and Sensors CMU SCS RI 16-722 S09 Ned Fox nfox@andrew.cmu.edu Outline What is collaborative exploration? Humans sensing robots Robots sensing humans Overseers sensing both Inherently safe systems
Prospective Teleautonomy For EOD Operations
 Perception and task guidance Perceived world model & intent Prospective Teleautonomy For EOD Operations Prof. Seth Teller Electrical Engineering and Computer Science Department Computer Science and Artificial
Perception and task guidance Perceived world model & intent Prospective Teleautonomy For EOD Operations Prof. Seth Teller Electrical Engineering and Computer Science Department Computer Science and Artificial