Interactive Virtual Environments
|
|
|
- Annis Spencer
- 6 years ago
- Views:
Transcription
1 Interactive Virtual Environments Introduction Emil M. Petriu, Dr. Eng., FIEEE Professor, School of Information Technology and Engineering University of Ottawa, Ottawa, ON, Canada May 2008
2 (Abstract) Modern virtual environments allow us to capture and manipulate multimodal - visual, auditory, haptic or other nature - sensor-based and/or synthetic models of 3D objects and phenomena. The behaviour and evolution of these object and phenomenon models can be driven by physical sensor data or by animation scripts. Human users can interact and directly manipulate objects within the virtual environment. This technology has already found promising applications in industry, communications, tele-robotics, medicine and healthcare, security and entertainment.
3 The first part of the course will discuss video and haptic sensor systems for multimodal acquisition and human-computer interfaces, as well as real-time NN modeling of 3D object shape and elastic behaviour. 3D tracking, modelling and animation techniques for human face, body and gestures will also be presented. The second part of the course will address basic principles and discuss scenarios of symbiotic human-computer interaction for the next evolutionary stage of the computing technology. It will be a symbiotic partnership where humans will contribute humanspecific capabilities complementing those of the computers. The leader/assistant role of the human and the computer partner, respectively, will be decided on the basis of maximizing the overall efficiency of the symbiotic team. Reference [1] G. Burdea and Ph. Coiffet, Virtual Reality Technology, (2 nd edition with CD-ROM), Wiley, New Jersey, 2003, (ISBN ).
4 Natural and Virtual Reality Virtual Reality Interactive Virtual Reality Virtualized Reality Augmented Reality
5 HUMAN PERCEPTION OF REALITY HUMAN (sentient living animal able of sensible reasoning) REAL WORLD / ENVIRONMENT
6 Human Sensing Real/Material World
7 Model of the real world perceived by the human Neural Network / brain trough sensory organs Reality Perception by Humans as a Neural Network Process Real/Material World
8
 3) You will see a circle of light developing 4) Start blinking your eyes a couple of times and you will see a")
9 1) Relax and concentrate on the 4 dots in the middle of the picture for aprox secs. 2) Then, take a look at a wall near you (resp. any smooth, single coloured surface) 3) You will see a circle of light developing 4) Start blinking your eyes a couple of times and you will see a figure emerging.
10 What Is Virtual Reality? A Web-Based Introduction Version 4 Draft 1, September, 1998 Jerry Isdale
11 >>> What Is Virtual Reality? -A Web-Based Introduction, by Jerry Isdale 1. Overview 2. A Taxonomy of Virtual Reality 3. Types of VR Systems 4. VR Hardware 5. Levels of VR Hardware Systems 6. VR System Technical Approaches 7. Available VR Software Systems 8. Aspects of A VR Program 9. Other Senses 10. World Space 11. World Database 12. World Authoring versus Playback 13. World Design 14. Fiction Books Related to VR
12 Virtual Environments allow humans to visualize, manipulate and interact with computer models and extremely complex data. Computer generated visual, auditory, force or other sensory outputs to the human user can be mixed with the sensor based models of the real world to generate a virtual world within the computer. This virtual environment (VE) may be a CAD like model, a scientific simulation, or a view into a database. The users can interact and directly manipulate objects within VE. Some virtual environments are animated by other processes, simulations, or simple animation scripts. VE technology has already found applications in industrial design, communications, telerobotics, scientific research, medicine, training & education, and entertainment.
13 Types of VR Systems according to [Isdale] Window on World Systems (WoW), or Desktop VR. Video Mapping. variation of the WoW approach where the user watches a monitor that shows his body s silhouette interaction with the world. Immersive Systems. completely immerse the user's personal viewpoint inside the virtual world. These "immersive" VR systems are equipped with Head Mounted Displays (HMD), or a 'Cave' or room in which the viewer stands. The Holodeck used in the "Star Trek: The Next Generation" is an extrapolation of this technology.
14 Types of VR Systems according to [Isdale] Telepresence. links remote sensors in the real world with the senses of a human operator. Applications => remote sensors might be located teleoperated robots for fire fire fighting, space or undersea operations. Surgeons are using instruments on cables having a video camera at the point of operation. Mixed Reality, or Seamless Simulation, mixes the Telepresence and Virtual Reality systems. The computer generated inputs are merged with telepresence inputs and/or the users view of the real world. Applications => surgeon's view of a brain surgery is overlaid with images from earlier CAT scans and real-time ultrasound. A fighter pilot sees computer generated maps and data displays inside his HMD.
15 Virtualized Reality Prof. Takeo Kanade, Robotics Institute, Carnegie Mellon University, Pittsburgh, PA, USA In contrast to virtual reality, in which synthetic environments are created, Virtualized Reality is based on events taking place in the real world, which are captured and processed by computer manipulation,
16 >>> Virtualized Reality Prof. Pierre Boulanger, University of Alberta, Edmonton, AB, Canada Virtualized reality is a generalization of the standard visual simulation paradigm where the model and the actions used in the simulated world are extracted from various sensors and information retrieval systems. The resulting visual simulation aims at an exact representation of the real world allowing for photo realistic rendering, telepresence, remote control, and intuitive information queries.
17 Augmented Reality & Computer Augmented Environments Prof. Jim Vallino, Departments of Computer Science and Software Engineering Rochester Institute of Technology, Rochester,USA, The basic difference between the Augmented Reality and the Virtual Reality is the immersiveness of the system. Virtual reality strives for a totally immersive environment. The visual, and in some systems aural and proprioceptive, senses are under control of the system. In contrast, an augmented reality system is augmenting the real world scene necessitating that the user maintains a sense of presence in that world. The virtual images are merged with the real view to create the augmented display. There must be a mechanism to combine the real and virtual that is not present in other virtual reality work
18 >>> Augmented Reality & Computer Augmented Environments SONY Links on Augmented Reality Projects US Department of the Navy, Office of Naval Research, Battlefield Augmented Reality System (BARS) US National Tele-Immersion Initiative Tele-Immersion (National Tele-immersion Initiative - NTII) will enable users at geographically distributed sites to collaborate in real time in a shared, simulated environment as if they were in the same physical room. This new paradigm for human-computer interaction is the ultimate synthesis of networking and media technologies and, as such, it is the greatest technical challenge for Internet.
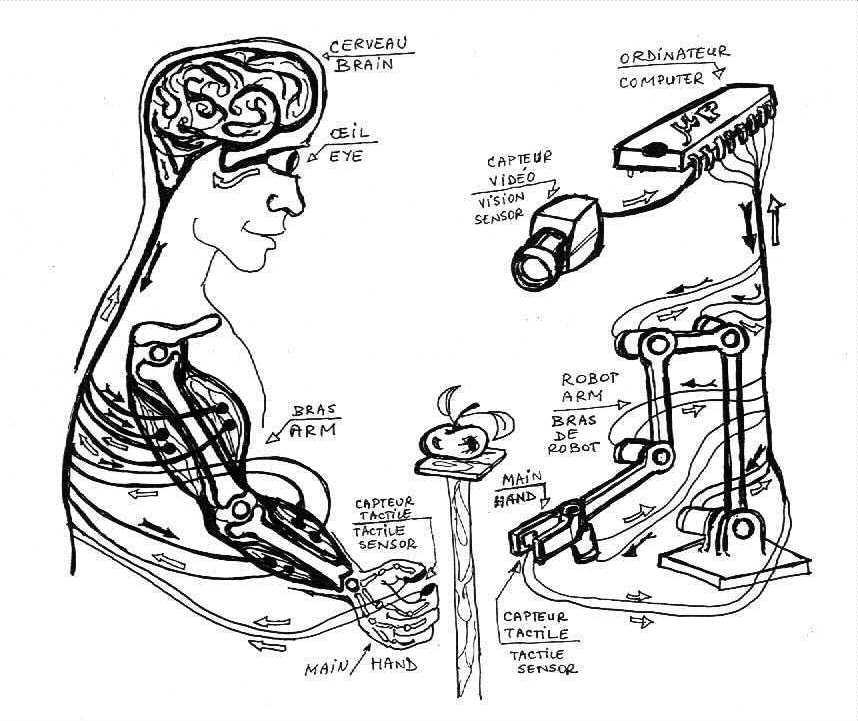
19 E.M. Petriu and T.E. Whalen, " Computer-Controlled Human Operators," IEEE Instrum. Meas. Mag., Vol. 5, No. 1, pp , 2002 HUMAN COMPUTER INTERACTION SENSORS SENSORS ACTUATORS Interfacing virtual environments with the real world and human operators
20 HUMAN COMPUTER INTERACTION SENSORS SENSORS ACTUATORS Human interaction with the real world and in augmented virtual reality



21 Commercial Virtual Hand Toolkit for CyberGlove/Grasp, Head Mounted Display, and see through visual display
22 Optical see-through display Video Camera Human operator using augmented virtual reality in a structured real world.


23 Computer vision recognition of the pseudo-random binary code, which is then used as augmented reality information.
 after rare expected stimuli is evoked.")
24 Neural Network Classification of Brain-Computer Interface Data for the Telecontrol of Symbiotic Sensor Agents The Brain-Computer Interfaces (BCI) system is based on the well-known oddball paradigm that uses a positive deflection in EEG signal of about 300ms (P300) after rare expected stimuli is evoked. The advantage is that subjects do not have to be trained to generate the P300 effect as it occurs naturally in human subjects. We are using auditory stimuli to generate the P300 responses and a less computationally intensive MLP feed-forward NN for the classification of the EEG responses. In our experimental setup a human teleoperator equipped with visual and audio HCI, and a BCI controls at the strategic level the movements of an intelligent semi-autonomous RSA equipped with an on board camera and three IR sensors that semi- autonomously navigates through a maze using a tactical-level obstacle-avoidance algorithm
25 Virtual Operation Theater OBJ (N)... OBJ (1)... OBJ ( j ) 3D Geometric& Elastic Composite Model of Object {( x, y, z,e ) p = 1,..,P } p p p p AVATAR HAND ( k ) Application Specific Interactive Action Scenario { [ 3D(j) & F(k,j) ], t } Composite HapticInteraction Vector between User (k) and Object (j) Haptic Human Interface USER (k) Haptic Robot Interface ROBOT(k) NETWORK OBJ(i) CyberGrasp CyberTouch Robot Arm Controller Tactile Sensor Interface Interactive Model-Based Hapto-Visual Teleoperation - a human operator equipped with haptic HCI can telemanipulate physical objects with the help of a robotic equipped with haptic sensors.
26 SCRIPT-BASED & GESTURE-BASED INTERACTIVE AVATAR ANIMATION Computer Generated Objects Object Interaction Models ANIMATION SCRIPT Object Shape & Behavior Models Sensor Data Fusion & Interpretation Virtual Object Manipulation Motion Tracking Object Recognition Virtual_Environment / Real_World Interfaces Avatar _S! Visual Feedback(s) Video Sensor(s) Structured Light Audio Feedback(s) Audio Sensor(s) Avatar _Sn Avatar _H i Tactile Feedback(s) Tactile Sensor(s) VIRTUAL SCENE Force Feedback(s) HUMAN PUPPETEER Force Sensor(s)
27 GESTURE-BASED INTERACTIVE AVATAR ANIMATION Object Shape & Behavior Models Sensor Data Fusion & Interpretation Virtual Object Manipulation Motion Tracking Object Recognition Virtual_Environment / Real_World Interfaces Visual Feedback(s) Video Sensor(s) Structured Light Audio Feedback(s) Audio Sensor(s) Avatar _H i Tactile Feedback(s) Tactile Sensor(s) VIRTUAL SCENE Force Feedback(s) HUMAN PUPPETEER Force Sensor(s)
28 SCRIPT-BASED INTERACTIVE AVATAR ANIMATION Computer Generated Objects ANIMATION SCRIPT Object Interaction Models Object Shape & Behavior Models Virtual Object Manipulation Avatar _S! Avatar _Sn VIRTUAL SCENE
29 Avatar / Machine level Instructions INTERPRETER/COMPILER INVERSE KINEMATIC CONTROL 3-D ARTICULATED AVATAR Face Modell (Facial Action Coding ) Body Model (Joint Control ) Face muscleactivation instructions Jointactivation instructions Story-level Instructions Voice synthesizer ANIMATION SCRIPT
30 STORY-LEVEL INSTRUCTIONS.. DaneelA sits on the chair#4. DanielA writes Hello on stationary. He sees HappyCat under the white table. DaneelA starts smiling. HappyCat grins back. SKILL-LEVEL ( MACRO ) INSTRUCTIONS.. DanielA s right hand moves the pen to follow the trace representing H. DanielA s right hand moves the pen to follow the trace representing e. DanielA s right hand moves the pen to follow the trace representing l. DanielA s right hand moves the pen to follow the trace representing l. DanielA s right hand moves the pen to follow the trace representing o.
31 SKILL-LEVEL ( MACRO ) INSTRUCTIONS DanielA s right hand moves the pen to follow the trace representing H. DanielA s specific style of moving his right arm joints to write H ( NN model capturing DanielA s writing personality ) Rotate Wrist to a i Rotate Elbow to b j Rotate Shoulder to g k 3-D Model of DanieA s Right Hand Shoulder z Elbow y x Wrist
VIRTUAL REALITY Introduction. Emil M. Petriu SITE, University of Ottawa
 VIRTUAL REALITY Introduction Emil M. Petriu SITE, University of Ottawa Natural and Virtual Reality Virtual Reality Interactive Virtual Reality Virtualized Reality Augmented Reality HUMAN PERCEPTION OF
VIRTUAL REALITY Introduction Emil M. Petriu SITE, University of Ottawa Natural and Virtual Reality Virtual Reality Interactive Virtual Reality Virtualized Reality Augmented Reality HUMAN PERCEPTION OF
Robotic, Human, and Symbiotic Sensor Agents
 Robotic, Human, and Symbiotic Sensor Agents Emil M. Petriu, Dr. Eng., FIEEE School of Information Technology and Engineering University of Ottawa Ottawa, ON., K1N 6N5 Canada http://www.site.uottawa.ca/~petriu
Robotic, Human, and Symbiotic Sensor Agents Emil M. Petriu, Dr. Eng., FIEEE School of Information Technology and Engineering University of Ottawa Ottawa, ON., K1N 6N5 Canada http://www.site.uottawa.ca/~petriu
Virtual Environments. Ruth Aylett
 Virtual Environments Ruth Aylett Aims of the course 1. To demonstrate a critical understanding of modern VE systems, evaluating the strengths and weaknesses of the current VR technologies 2. To be able
Virtual Environments Ruth Aylett Aims of the course 1. To demonstrate a critical understanding of modern VE systems, evaluating the strengths and weaknesses of the current VR technologies 2. To be able
Haptic Sensing and Perception for Telerobotic Manipulation
 Haptic Sensing and Perception for Telerobotic Manipulation Emil M. Petriu, Dr. Eng., P.Eng., FIEEE Professor School of Information Technology and Engineering University of Ottawa Ottawa, ON., K1N 6N5 Canada
Haptic Sensing and Perception for Telerobotic Manipulation Emil M. Petriu, Dr. Eng., P.Eng., FIEEE Professor School of Information Technology and Engineering University of Ottawa Ottawa, ON., K1N 6N5 Canada
MECHANICAL DESIGN LEARNING ENVIRONMENTS BASED ON VIRTUAL REALITY TECHNOLOGIES
 INTERNATIONAL CONFERENCE ON ENGINEERING AND PRODUCT DESIGN EDUCATION 4 & 5 SEPTEMBER 2008, UNIVERSITAT POLITECNICA DE CATALUNYA, BARCELONA, SPAIN MECHANICAL DESIGN LEARNING ENVIRONMENTS BASED ON VIRTUAL
INTERNATIONAL CONFERENCE ON ENGINEERING AND PRODUCT DESIGN EDUCATION 4 & 5 SEPTEMBER 2008, UNIVERSITAT POLITECNICA DE CATALUNYA, BARCELONA, SPAIN MECHANICAL DESIGN LEARNING ENVIRONMENTS BASED ON VIRTUAL
Symbiotic Human-Computer Interaction
 Symbiotic Human-Computer Interaction Emil M. Petriu University of Ottawa, Ottawa, ON, Canada http://www.site.uottawa.ca/~petriu/ Thomas E. Whalen CRC, Ottawa, ON, Canada Abstract The presentation will
Symbiotic Human-Computer Interaction Emil M. Petriu University of Ottawa, Ottawa, ON, Canada http://www.site.uottawa.ca/~petriu/ Thomas E. Whalen CRC, Ottawa, ON, Canada Abstract The presentation will
AUGMENTED VIRTUAL REALITY APPLICATIONS IN MANUFACTURING
 6 th INTERNATIONAL MULTIDISCIPLINARY CONFERENCE AUGMENTED VIRTUAL REALITY APPLICATIONS IN MANUFACTURING Peter Brázda, Jozef Novák-Marcinčin, Faculty of Manufacturing Technologies, TU Košice Bayerova 1,
6 th INTERNATIONAL MULTIDISCIPLINARY CONFERENCE AUGMENTED VIRTUAL REALITY APPLICATIONS IN MANUFACTURING Peter Brázda, Jozef Novák-Marcinčin, Faculty of Manufacturing Technologies, TU Košice Bayerova 1,
INTUITION Integrated Research Roadmap
 Integrated Research Roadmap Giannis Karaseitanidis Institute of Communication and Computer Systems European Commission DG Information Society FP6-funded Project 7/11/2007, Rome Alenia Spazio S.p.A. Network
Integrated Research Roadmap Giannis Karaseitanidis Institute of Communication and Computer Systems European Commission DG Information Society FP6-funded Project 7/11/2007, Rome Alenia Spazio S.p.A. Network
Development of a telepresence agent
 Author: Chung-Chen Tsai, Yeh-Liang Hsu (2001-04-06); recommended: Yeh-Liang Hsu (2001-04-06); last updated: Yeh-Liang Hsu (2004-03-23). Note: This paper was first presented at. The revised paper was presented
Author: Chung-Chen Tsai, Yeh-Liang Hsu (2001-04-06); recommended: Yeh-Liang Hsu (2001-04-06); last updated: Yeh-Liang Hsu (2004-03-23). Note: This paper was first presented at. The revised paper was presented
EXPERIMENTAL BILATERAL CONTROL TELEMANIPULATION USING A VIRTUAL EXOSKELETON
 EXPERIMENTAL BILATERAL CONTROL TELEMANIPULATION USING A VIRTUAL EXOSKELETON Josep Amat 1, Alícia Casals 2, Manel Frigola 2, Enric Martín 2 1Robotics Institute. (IRI) UPC / CSIC Llorens Artigas 4-6, 2a
EXPERIMENTAL BILATERAL CONTROL TELEMANIPULATION USING A VIRTUAL EXOSKELETON Josep Amat 1, Alícia Casals 2, Manel Frigola 2, Enric Martín 2 1Robotics Institute. (IRI) UPC / CSIC Llorens Artigas 4-6, 2a
Short Course on Computational Illumination
 Short Course on Computational Illumination University of Tampere August 9/10, 2012 Matthew Turk Computer Science Department and Media Arts and Technology Program University of California, Santa Barbara
Short Course on Computational Illumination University of Tampere August 9/10, 2012 Matthew Turk Computer Science Department and Media Arts and Technology Program University of California, Santa Barbara
Abdulmotaleb El Saddik Associate Professor Dr.-Ing., SMIEEE, P.Eng.
 Abdulmotaleb El Saddik Associate Professor Dr.-Ing., SMIEEE, P.Eng. Multimedia Communications Research Laboratory University of Ottawa Ontario Research Network of E-Commerce www.mcrlab.uottawa.ca abed@mcrlab.uottawa.ca
Abdulmotaleb El Saddik Associate Professor Dr.-Ing., SMIEEE, P.Eng. Multimedia Communications Research Laboratory University of Ottawa Ontario Research Network of E-Commerce www.mcrlab.uottawa.ca abed@mcrlab.uottawa.ca
HeroX - Untethered VR Training in Sync'ed Physical Spaces
 Page 1 of 6 HeroX - Untethered VR Training in Sync'ed Physical Spaces Above and Beyond - Integrating Robotics In previous research work I experimented with multiple robots remotely controlled by people
Page 1 of 6 HeroX - Untethered VR Training in Sync'ed Physical Spaces Above and Beyond - Integrating Robotics In previous research work I experimented with multiple robots remotely controlled by people
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics
 Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
Perception in Immersive Virtual Reality Environments ROB ALLISON DEPT. OF ELECTRICAL ENGINEERING AND COMPUTER SCIENCE YORK UNIVERSITY, TORONTO
 Perception in Immersive Virtual Reality Environments ROB ALLISON DEPT. OF ELECTRICAL ENGINEERING AND COMPUTER SCIENCE YORK UNIVERSITY, TORONTO Overview Basic concepts and ideas of virtual environments
Perception in Immersive Virtual Reality Environments ROB ALLISON DEPT. OF ELECTRICAL ENGINEERING AND COMPUTER SCIENCE YORK UNIVERSITY, TORONTO Overview Basic concepts and ideas of virtual environments
Virtual Grasping Using a Data Glove
 Virtual Grasping Using a Data Glove By: Rachel Smith Supervised By: Dr. Kay Robbins 3/25/2005 University of Texas at San Antonio Motivation Navigation in 3D worlds is awkward using traditional mouse Direct
Virtual Grasping Using a Data Glove By: Rachel Smith Supervised By: Dr. Kay Robbins 3/25/2005 University of Texas at San Antonio Motivation Navigation in 3D worlds is awkward using traditional mouse Direct
The Mixed Reality Book: A New Multimedia Reading Experience
 The Mixed Reality Book: A New Multimedia Reading Experience Raphaël Grasset raphael.grasset@hitlabnz.org Andreas Dünser andreas.duenser@hitlabnz.org Mark Billinghurst mark.billinghurst@hitlabnz.org Hartmut
The Mixed Reality Book: A New Multimedia Reading Experience Raphaël Grasset raphael.grasset@hitlabnz.org Andreas Dünser andreas.duenser@hitlabnz.org Mark Billinghurst mark.billinghurst@hitlabnz.org Hartmut
Complementary Tactile Sensor and Human Interface for Robotic Telemanipulation
 Complementary Tactile Sensor and Human Interface for Robotic Telemanipulation Emil M. Petriu, Pierre Payeur, na-maria Cretu, and Codrin Pasca School of Information Technology and Engineering University
Complementary Tactile Sensor and Human Interface for Robotic Telemanipulation Emil M. Petriu, Pierre Payeur, na-maria Cretu, and Codrin Pasca School of Information Technology and Engineering University
CSC 2524, Fall 2018 Graphics, Interaction and Perception in Augmented and Virtual Reality AR/VR
 CSC 2524, Fall 2018 Graphics, Interaction and Perception in Augmented and Virtual Reality AR/VR Karan Singh Inspired and adapted from material by Mark Billinghurst What is this course about? Fundamentals
CSC 2524, Fall 2018 Graphics, Interaction and Perception in Augmented and Virtual Reality AR/VR Karan Singh Inspired and adapted from material by Mark Billinghurst What is this course about? Fundamentals
The Application of Virtual Reality Technology to Digital Tourism Systems
 The Application of Virtual Reality Technology to Digital Tourism Systems PAN Li-xin 1, a 1 Geographic Information and Tourism College Chuzhou University, Chuzhou 239000, China a czplx@sina.com Abstract
The Application of Virtual Reality Technology to Digital Tourism Systems PAN Li-xin 1, a 1 Geographic Information and Tourism College Chuzhou University, Chuzhou 239000, China a czplx@sina.com Abstract
preface Motivation Figure 1. Reality-virtuality continuum (Milgram & Kishino, 1994) Mixed.Reality Augmented. Virtuality Real...
 Mixed.Reality Augmented. Virtuality Real...") v preface Motivation Augmented reality (AR) research aims to develop technologies that allow the real-time fusion of computer-generated digital content with the real world. Unlike virtual reality (VR)
v preface Motivation Augmented reality (AR) research aims to develop technologies that allow the real-time fusion of computer-generated digital content with the real world. Unlike virtual reality (VR)
ARMY RDT&E BUDGET ITEM JUSTIFICATION (R2 Exhibit)
") Exhibit R-2 0602308A Advanced Concepts and Simulation ARMY RDT&E BUDGET ITEM JUSTIFICATION (R2 Exhibit) FY 2005 FY 2006 FY 2007 FY 2008 FY 2009 FY 2010 FY 2011 Total Program Element (PE) Cost 22710 27416
Exhibit R-2 0602308A Advanced Concepts and Simulation ARMY RDT&E BUDGET ITEM JUSTIFICATION (R2 Exhibit) FY 2005 FY 2006 FY 2007 FY 2008 FY 2009 FY 2010 FY 2011 Total Program Element (PE) Cost 22710 27416
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
Why interest in visual perception?
 Raffaella Folgieri Digital Information & Communication Departiment Constancy factors in visual perception 26/11/2010, Gjovik, Norway Why interest in visual perception? to investigate main factors in VR
Raffaella Folgieri Digital Information & Communication Departiment Constancy factors in visual perception 26/11/2010, Gjovik, Norway Why interest in visual perception? to investigate main factors in VR
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
Perception. Read: AIMA Chapter 24 & Chapter HW#8 due today. Vision
 11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
The Application of Virtual Reality in Art Design: A New Approach CHEN Dalei 1, a
 International Conference on Education Technology, Management and Humanities Science (ETMHS 2015) The Application of Virtual Reality in Art Design: A New Approach CHEN Dalei 1, a 1 School of Art, Henan
International Conference on Education Technology, Management and Humanities Science (ETMHS 2015) The Application of Virtual Reality in Art Design: A New Approach CHEN Dalei 1, a 1 School of Art, Henan
Novel machine interface for scaled telesurgery
 Novel machine interface for scaled telesurgery S. Clanton, D. Wang, Y. Matsuoka, D. Shelton, G. Stetten SPIE Medical Imaging, vol. 5367, pp. 697-704. San Diego, Feb. 2004. A Novel Machine Interface for
Novel machine interface for scaled telesurgery S. Clanton, D. Wang, Y. Matsuoka, D. Shelton, G. Stetten SPIE Medical Imaging, vol. 5367, pp. 697-704. San Diego, Feb. 2004. A Novel Machine Interface for
Welcome to this course on «Natural Interactive Walking on Virtual Grounds»!
 Welcome to this course on «Natural Interactive Walking on Virtual Grounds»! The speaker is Anatole Lécuyer, senior researcher at Inria, Rennes, France; More information about him at : http://people.rennes.inria.fr/anatole.lecuyer/
Welcome to this course on «Natural Interactive Walking on Virtual Grounds»! The speaker is Anatole Lécuyer, senior researcher at Inria, Rennes, France; More information about him at : http://people.rennes.inria.fr/anatole.lecuyer/
International Journal of Advanced Research in Computer Science and Software Engineering
 Volume 3, Issue 3, March 2013 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com A Study on SensAble
Volume 3, Issue 3, March 2013 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com A Study on SensAble
Immersive Training. David Lafferty President of Scientific Technical Services And ARC Associate
 Immersive Training David Lafferty President of Scientific Technical Services And ARC Associate Current Situation Great Shift Change Drive The Need For Training Conventional Training Methods Are Expensive
Immersive Training David Lafferty President of Scientific Technical Services And ARC Associate Current Situation Great Shift Change Drive The Need For Training Conventional Training Methods Are Expensive
A*STAR Unveils Singapore s First Social Robots at Robocup2010
 MEDIA RELEASE Singapore, 21 June 2010 Total: 6 pages A*STAR Unveils Singapore s First Social Robots at Robocup2010 Visit Suntec City to experience the first social robots - OLIVIA and LUCAS that can see,
MEDIA RELEASE Singapore, 21 June 2010 Total: 6 pages A*STAR Unveils Singapore s First Social Robots at Robocup2010 Visit Suntec City to experience the first social robots - OLIVIA and LUCAS that can see,
SIGVerse - A Simulation Platform for Human-Robot Interaction Jeffrey Too Chuan TAN and Tetsunari INAMURA National Institute of Informatics, Japan The
 SIGVerse - A Simulation Platform for Human-Robot Interaction Jeffrey Too Chuan TAN and Tetsunari INAMURA National Institute of Informatics, Japan The 29 th Annual Conference of The Robotics Society of
SIGVerse - A Simulation Platform for Human-Robot Interaction Jeffrey Too Chuan TAN and Tetsunari INAMURA National Institute of Informatics, Japan The 29 th Annual Conference of The Robotics Society of
Introduction to Virtual Reality. Chapter IX. Introduction to Virtual Reality. 9.1 Introduction. Definition of VR (W. Sherman)
") Introduction to Virtual Reality Chapter IX Introduction to Virtual Reality 9.1 Introduction 9.2 Hardware 9.3 Virtual Worlds 9.4 Examples of VR Applications 9.5 Augmented Reality 9.6 Conclusions CS 397
Introduction to Virtual Reality Chapter IX Introduction to Virtual Reality 9.1 Introduction 9.2 Hardware 9.3 Virtual Worlds 9.4 Examples of VR Applications 9.5 Augmented Reality 9.6 Conclusions CS 397
Hand Gesture Recognition Using Radial Length Metric
 Hand Gesture Recognition Using Radial Length Metric Warsha M.Choudhari 1, Pratibha Mishra 2, Rinku Rajankar 3, Mausami Sawarkar 4 1 Professor, Information Technology, Datta Meghe Institute of Engineering,
Hand Gesture Recognition Using Radial Length Metric Warsha M.Choudhari 1, Pratibha Mishra 2, Rinku Rajankar 3, Mausami Sawarkar 4 1 Professor, Information Technology, Datta Meghe Institute of Engineering,
Booklet of teaching units
 International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
CAPACITIES FOR TECHNOLOGY TRANSFER
 CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
Activities at SC 24 WG 9: An Overview
 Activities at SC 24 WG 9: An Overview G E R A R D J. K I M, C O N V E N E R I S O J T C 1 S C 2 4 W G 9 Mixed and Augmented Reality (MAR) ISO SC 24 and MAR ISO-IEC JTC 1 SC 24 Have developed standards
Activities at SC 24 WG 9: An Overview G E R A R D J. K I M, C O N V E N E R I S O J T C 1 S C 2 4 W G 9 Mixed and Augmented Reality (MAR) ISO SC 24 and MAR ISO-IEC JTC 1 SC 24 Have developed standards
FALL 2014, Issue No. 32 ROBOTICS AT OUR FINGERTIPS
 FALL 2014, Issue No. 32 ROBOTICS AT OUR FINGERTIPS FALL 2014 Issue No. 32 12 CYBERSECURITY SOLUTION NSF taps UCLA Engineering to take lead in encryption research. Cover Photo: Joanne Leung 6MAN AND MACHINE
FALL 2014, Issue No. 32 ROBOTICS AT OUR FINGERTIPS FALL 2014 Issue No. 32 12 CYBERSECURITY SOLUTION NSF taps UCLA Engineering to take lead in encryption research. Cover Photo: Joanne Leung 6MAN AND MACHINE
Bio-Inspired Robot Sensing and Control Solutions
 Bio-Inspired Robot Sensing and Control Solutions Emil M. Petriu, Professor School of Electrical Engineering and Computer Science University of Ottawa http://www.site.uottawa.ca/~petriu/ petriu@uottawa.ca
Bio-Inspired Robot Sensing and Control Solutions Emil M. Petriu, Professor School of Electrical Engineering and Computer Science University of Ottawa http://www.site.uottawa.ca/~petriu/ petriu@uottawa.ca
What is Virtual Reality? Burdea,1993. Virtual Reality Triangle Triangle I 3 I 3. Virtual Reality in Product Development. Virtual Reality Technology
 Virtual Reality man made reality sense world What is Virtual Reality? Dipl-Ing Indra Kusumah Digital Product Design Fraunhofer IPT Steinbachstrasse 17 D-52074 Aachen Indrakusumah@iptfraunhoferde wwwiptfraunhoferde
Virtual Reality man made reality sense world What is Virtual Reality? Dipl-Ing Indra Kusumah Digital Product Design Fraunhofer IPT Steinbachstrasse 17 D-52074 Aachen Indrakusumah@iptfraunhoferde wwwiptfraunhoferde
Interface Design V: Beyond the Desktop
 Interface Design V: Beyond the Desktop Rob Procter Further Reading Dix et al., chapter 4, p. 153-161 and chapter 15. Norman, The Invisible Computer, MIT Press, 1998, chapters 4 and 15. 11/25/01 CS4: HCI
Interface Design V: Beyond the Desktop Rob Procter Further Reading Dix et al., chapter 4, p. 153-161 and chapter 15. Norman, The Invisible Computer, MIT Press, 1998, chapters 4 and 15. 11/25/01 CS4: HCI
Advanced Man-Machine Interaction
 Signals and Communication Technology Advanced Man-Machine Interaction Fundamentals and Implementation Bearbeitet von Karl-Friedrich Kraiss 1. Auflage 2006. Buch. XIX, 461 S. ISBN 978 3 540 30618 4 Format
Signals and Communication Technology Advanced Man-Machine Interaction Fundamentals and Implementation Bearbeitet von Karl-Friedrich Kraiss 1. Auflage 2006. Buch. XIX, 461 S. ISBN 978 3 540 30618 4 Format
Mid-term report - Virtual reality and spatial mobility
 Mid-term report - Virtual reality and spatial mobility Jarl Erik Cedergren & Stian Kongsvik October 10, 2017 The group members: - Jarl Erik Cedergren (jarlec@uio.no) - Stian Kongsvik (stiako@uio.no) 1
Mid-term report - Virtual reality and spatial mobility Jarl Erik Cedergren & Stian Kongsvik October 10, 2017 The group members: - Jarl Erik Cedergren (jarlec@uio.no) - Stian Kongsvik (stiako@uio.no) 1
Perceptual Interfaces. Matthew Turk s (UCSB) and George G. Robertson s (Microsoft Research) slides on perceptual p interfaces
 and George G. Robertson s (Microsoft Research) slides on perceptual p interfaces") Perceptual Interfaces Adapted from Matthew Turk s (UCSB) and George G. Robertson s (Microsoft Research) slides on perceptual p interfaces Outline Why Perceptual Interfaces? Multimodal interfaces Vision
Perceptual Interfaces Adapted from Matthew Turk s (UCSB) and George G. Robertson s (Microsoft Research) slides on perceptual p interfaces Outline Why Perceptual Interfaces? Multimodal interfaces Vision
Subject Description Form. Upon completion of the subject, students will be able to:
 Subject Description Form Subject Code Subject Title EIE408 Principles of Virtual Reality Credit Value 3 Level 4 Pre-requisite/ Corequisite/ Exclusion Objectives Intended Subject Learning Outcomes Nil To
Subject Description Form Subject Code Subject Title EIE408 Principles of Virtual Reality Credit Value 3 Level 4 Pre-requisite/ Corequisite/ Exclusion Objectives Intended Subject Learning Outcomes Nil To
VR Haptic Interfaces for Teleoperation : an Evaluation Study
 VR Haptic Interfaces for Teleoperation : an Evaluation Study Renaud Ott, Mario Gutiérrez, Daniel Thalmann, Frédéric Vexo Virtual Reality Laboratory Ecole Polytechnique Fédérale de Lausanne (EPFL) CH-1015
VR Haptic Interfaces for Teleoperation : an Evaluation Study Renaud Ott, Mario Gutiérrez, Daniel Thalmann, Frédéric Vexo Virtual Reality Laboratory Ecole Polytechnique Fédérale de Lausanne (EPFL) CH-1015
Computer Vision in Human-Computer Interaction
 Invited talk in 2010 Autumn Seminar and Meeting of Pattern Recognition Society of Finland, M/S Baltic Princess, 26.11.2010 Computer Vision in Human-Computer Interaction Matti Pietikäinen Machine Vision
Invited talk in 2010 Autumn Seminar and Meeting of Pattern Recognition Society of Finland, M/S Baltic Princess, 26.11.2010 Computer Vision in Human-Computer Interaction Matti Pietikäinen Machine Vision
Kinect Interface for UC-win/Road: Application to Tele-operation of Small Robots
 Kinect Interface for UC-win/Road: Application to Tele-operation of Small Robots Hafid NINISS Forum8 - Robot Development Team Abstract: The purpose of this work is to develop a man-machine interface for
Kinect Interface for UC-win/Road: Application to Tele-operation of Small Robots Hafid NINISS Forum8 - Robot Development Team Abstract: The purpose of this work is to develop a man-machine interface for
- applications on same or different network node of the workstation - portability of application software - multiple displays - open architecture
 12 Window Systems - A window system manages a computer screen. - Divides the screen into overlapping regions. - Each region displays output from a particular application. X window system is widely used
12 Window Systems - A window system manages a computer screen. - Divides the screen into overlapping regions. - Each region displays output from a particular application. X window system is widely used
Mission Space. Value-based use of augmented reality in support of critical contextual environments
 Mission Space Value-based use of augmented reality in support of critical contextual environments Vicki A. Barbur Ph.D. Senior Vice President and Chief Technical Officer Concurrent Technologies Corporation
Mission Space Value-based use of augmented reality in support of critical contextual environments Vicki A. Barbur Ph.D. Senior Vice President and Chief Technical Officer Concurrent Technologies Corporation
Modeling and Simulation: Linking Entertainment & Defense
 Calhoun: The NPS Institutional Archive Faculty and Researcher Publications Faculty and Researcher Publications 1998 Modeling and Simulation: Linking Entertainment & Defense Zyda, Michael 1 April 98: "Modeling
Calhoun: The NPS Institutional Archive Faculty and Researcher Publications Faculty and Researcher Publications 1998 Modeling and Simulation: Linking Entertainment & Defense Zyda, Michael 1 April 98: "Modeling
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT
 MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
ISO JTC 1 SC 24 WG9 G E R A R D J. K I M K O R E A U N I V E R S I T Y
 New Work Item Proposal: A Standard Reference Model for Generic MAR Systems ISO JTC 1 SC 24 WG9 G E R A R D J. K I M K O R E A U N I V E R S I T Y What is a Reference Model? A reference model (for a given
New Work Item Proposal: A Standard Reference Model for Generic MAR Systems ISO JTC 1 SC 24 WG9 G E R A R D J. K I M K O R E A U N I V E R S I T Y What is a Reference Model? A reference model (for a given
INTELLIGENT UNMANNED GROUND VEHICLES Autonomous Navigation Research at Carnegie Mellon
 INTELLIGENT UNMANNED GROUND VEHICLES Autonomous Navigation Research at Carnegie Mellon THE KLUWER INTERNATIONAL SERIES IN ENGINEERING AND COMPUTER SCIENCE ROBOTICS: VISION, MANIPULATION AND SENSORS Consulting
INTELLIGENT UNMANNED GROUND VEHICLES Autonomous Navigation Research at Carnegie Mellon THE KLUWER INTERNATIONAL SERIES IN ENGINEERING AND COMPUTER SCIENCE ROBOTICS: VISION, MANIPULATION AND SENSORS Consulting
Practical Data Visualization and Virtual Reality. Virtual Reality VR Display Systems. Karljohan Lundin Palmerius
 Practical Data Visualization and Virtual Reality Virtual Reality VR Display Systems Karljohan Lundin Palmerius Synopsis Virtual Reality basics Common display systems Visual modality Sound modality Interaction
Practical Data Visualization and Virtual Reality Virtual Reality VR Display Systems Karljohan Lundin Palmerius Synopsis Virtual Reality basics Common display systems Visual modality Sound modality Interaction
Computer Assisted Medical Interventions
 Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Outline Computer Assisted Medical Interventions Force control, collaborative manipulation and telemanipulation Bernard BAYLE Joint course University of Strasbourg, University of Houston, Telecom Paris
Using Hybrid Reality to Explore Scientific Exploration Scenarios
 Using Hybrid Reality to Explore Scientific Exploration Scenarios EVA Technology Workshop 2017 Kelsey Young Exploration Scientist NASA Hybrid Reality Lab - Background Combines real-time photo-realistic
Using Hybrid Reality to Explore Scientific Exploration Scenarios EVA Technology Workshop 2017 Kelsey Young Exploration Scientist NASA Hybrid Reality Lab - Background Combines real-time photo-realistic
Haptics CS327A
 Haptics CS327A - 217 hap tic adjective relating to the sense of touch or to the perception and manipulation of objects using the senses of touch and proprioception 1 2 Slave Master 3 Courtesy of Walischmiller
Haptics CS327A - 217 hap tic adjective relating to the sense of touch or to the perception and manipulation of objects using the senses of touch and proprioception 1 2 Slave Master 3 Courtesy of Walischmiller
EE631 Cooperating Autonomous Mobile Robots. Lecture 1: Introduction. Prof. Yi Guo ECE Department
 EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
EE631 Cooperating Autonomous Mobile Robots Lecture 1: Introduction Prof. Yi Guo ECE Department Plan Overview of Syllabus Introduction to Robotics Applications of Mobile Robots Ways of Operation Single
2. Introduction to Computer Haptics
 2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
VIRTUAL REALITY FOR NONDESTRUCTIVE EVALUATION APPLICATIONS
 VIRTUAL REALITY FOR NONDESTRUCTIVE EVALUATION APPLICATIONS Jaejoon Kim, S. Mandayam, S. Udpa, W. Lord, and L. Udpa Department of Electrical and Computer Engineering Iowa State University Ames, Iowa 500
VIRTUAL REALITY FOR NONDESTRUCTIVE EVALUATION APPLICATIONS Jaejoon Kim, S. Mandayam, S. Udpa, W. Lord, and L. Udpa Department of Electrical and Computer Engineering Iowa State University Ames, Iowa 500
FORCE FEEDBACK. Roope Raisamo
 FORCE FEEDBACK Roope Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere, Finland Outline Force feedback interfaces
FORCE FEEDBACK Roope Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere, Finland Outline Force feedback interfaces
Haptic Sensors and Interfaces
 Haptic Sensors and Interfaces Emil M. Petriu, Dr. Eng., FIEEE School of Electrical Engineering and Computer Science University of Ottawa, Canada http://www.site.uottawa.ca/~petriu Human Haptic Perception
Haptic Sensors and Interfaces Emil M. Petriu, Dr. Eng., FIEEE School of Electrical Engineering and Computer Science University of Ottawa, Canada http://www.site.uottawa.ca/~petriu Human Haptic Perception
VR based HCI Techniques & Application. November 29, 2002
 VR based HCI Techniques & Application November 29, 2002 stefan.seipel@hci.uu.se What is Virtual Reality? Coates (1992): Virtual Reality is electronic simulations of environments experienced via head mounted
VR based HCI Techniques & Application November 29, 2002 stefan.seipel@hci.uu.se What is Virtual Reality? Coates (1992): Virtual Reality is electronic simulations of environments experienced via head mounted
Multi-Modal User Interaction
 Multi-Modal User Interaction Lecture 4: Multiple Modalities Zheng-Hua Tan Department of Electronic Systems Aalborg University, Denmark zt@es.aau.dk MMUI, IV, Zheng-Hua Tan 1 Outline Multimodal interface
Multi-Modal User Interaction Lecture 4: Multiple Modalities Zheng-Hua Tan Department of Electronic Systems Aalborg University, Denmark zt@es.aau.dk MMUI, IV, Zheng-Hua Tan 1 Outline Multimodal interface
Toward Principles for Visual Interaction Design for Communicating Weight by using Pseudo-Haptic Feedback
 Toward Principles for Visual Interaction Design for Communicating Weight by using Pseudo-Haptic Feedback Kumiyo Nakakoji Key Technology Laboratory SRA Inc. 2-32-8 Minami-Ikebukuro, Toshima, Tokyo, 171-8513,
Toward Principles for Visual Interaction Design for Communicating Weight by using Pseudo-Haptic Feedback Kumiyo Nakakoji Key Technology Laboratory SRA Inc. 2-32-8 Minami-Ikebukuro, Toshima, Tokyo, 171-8513,
ELG 5121/CSI 7631 Fall Projects Overview. Projects List
 ELG 5121/CSI 7631 Fall 2009 Projects Overview Projects List X-Reality Affective Computing Brain-Computer Interaction Ambient Intelligence Web 3.0 Biometrics: Identity Verification in a Networked World
ELG 5121/CSI 7631 Fall 2009 Projects Overview Projects List X-Reality Affective Computing Brain-Computer Interaction Ambient Intelligence Web 3.0 Biometrics: Identity Verification in a Networked World
RoboCup. Presented by Shane Murphy April 24, 2003
 RoboCup Presented by Shane Murphy April 24, 2003 RoboCup: : Today and Tomorrow What we have learned Authors Minoru Asada (Osaka University, Japan), Hiroaki Kitano (Sony CS Labs, Japan), Itsuki Noda (Electrotechnical(
RoboCup Presented by Shane Murphy April 24, 2003 RoboCup: : Today and Tomorrow What we have learned Authors Minoru Asada (Osaka University, Japan), Hiroaki Kitano (Sony CS Labs, Japan), Itsuki Noda (Electrotechnical(
A Multimodal Locomotion User Interface for Immersive Geospatial Information Systems
 F. Steinicke, G. Bruder, H. Frenz 289 A Multimodal Locomotion User Interface for Immersive Geospatial Information Systems Frank Steinicke 1, Gerd Bruder 1, Harald Frenz 2 1 Institute of Computer Science,
F. Steinicke, G. Bruder, H. Frenz 289 A Multimodal Locomotion User Interface for Immersive Geospatial Information Systems Frank Steinicke 1, Gerd Bruder 1, Harald Frenz 2 1 Institute of Computer Science,
By: Celine, Yan Ran, Yuolmae. Image from oss
 IMMERSION By: Celine, Yan Ran, Yuolmae Image from oss Content 1. Char Davies 2. Osmose 3. The Ultimate Display, Ivan Sutherland 4. Virtual Environments, Scott Fisher Artist A Canadian contemporary artist
IMMERSION By: Celine, Yan Ran, Yuolmae Image from oss Content 1. Char Davies 2. Osmose 3. The Ultimate Display, Ivan Sutherland 4. Virtual Environments, Scott Fisher Artist A Canadian contemporary artist
Realtime 3D Computer Graphics Virtual Reality
 Realtime 3D Computer Graphics Virtual Reality Marc Erich Latoschik AI & VR Lab Artificial Intelligence Group University of Bielefeld Virtual Reality (or VR for short) Virtual Reality (or VR for short)
Realtime 3D Computer Graphics Virtual Reality Marc Erich Latoschik AI & VR Lab Artificial Intelligence Group University of Bielefeld Virtual Reality (or VR for short) Virtual Reality (or VR for short)
Job Description. Commitment: Must be available to work full-time hours, M-F for weeks beginning Summer of 2018.
 Research Intern Director of Research We are seeking a summer intern to support the team to develop prototype 3D sensing systems based on state-of-the-art sensing technologies along with computer vision
Research Intern Director of Research We are seeking a summer intern to support the team to develop prototype 3D sensing systems based on state-of-the-art sensing technologies along with computer vision
Application of 3D Terrain Representation System for Highway Landscape Design
 Application of 3D Terrain Representation System for Highway Landscape Design Koji Makanae Miyagi University, Japan Nashwan Dawood Teesside University, UK Abstract In recent years, mixed or/and augmented
Application of 3D Terrain Representation System for Highway Landscape Design Koji Makanae Miyagi University, Japan Nashwan Dawood Teesside University, UK Abstract In recent years, mixed or/and augmented
Haptics Technologies: Bringing Touch to Multimedia
 Haptics Technologies: Bringing Touch to Multimedia C2: Haptics Applications Outline Haptic Evolution: from Psychophysics to Multimedia Haptics for Medical Applications Surgical Simulations Stroke-based
Haptics Technologies: Bringing Touch to Multimedia C2: Haptics Applications Outline Haptic Evolution: from Psychophysics to Multimedia Haptics for Medical Applications Surgical Simulations Stroke-based
Toward an Augmented Reality System for Violin Learning Support
 Toward an Augmented Reality System for Violin Learning Support Hiroyuki Shiino, François de Sorbier, and Hideo Saito Graduate School of Science and Technology, Keio University, Yokohama, Japan {shiino,fdesorbi,saito}@hvrl.ics.keio.ac.jp
Toward an Augmented Reality System for Violin Learning Support Hiroyuki Shiino, François de Sorbier, and Hideo Saito Graduate School of Science and Technology, Keio University, Yokohama, Japan {shiino,fdesorbi,saito}@hvrl.ics.keio.ac.jp
How is a robot controlled? Teleoperation and autonomy. Levels of autonomy 1a. Remote control Visual contact / no sensor feedback.
 Teleoperation and autonomy Thomas Hellström Umeå University Sweden How is a robot controlled? 1. By the human operator 2. Mixed human and robot 3. By the robot itself Levels of autonomy! Slide material
Teleoperation and autonomy Thomas Hellström Umeå University Sweden How is a robot controlled? 1. By the human operator 2. Mixed human and robot 3. By the robot itself Levels of autonomy! Slide material
Using Simulation to Design Control Strategies for Robotic No-Scar Surgery
 Using Simulation to Design Control Strategies for Robotic No-Scar Surgery Antonio DE DONNO 1, Florent NAGEOTTE, Philippe ZANNE, Laurent GOFFIN and Michel de MATHELIN LSIIT, University of Strasbourg/CNRS,
Using Simulation to Design Control Strategies for Robotic No-Scar Surgery Antonio DE DONNO 1, Florent NAGEOTTE, Philippe ZANNE, Laurent GOFFIN and Michel de MATHELIN LSIIT, University of Strasbourg/CNRS,
Gesture Recognition with Real World Environment using Kinect: A Review
 Gesture Recognition with Real World Environment using Kinect: A Review Prakash S. Sawai 1, Prof. V. K. Shandilya 2 P.G. Student, Department of Computer Science & Engineering, Sipna COET, Amravati, Maharashtra,
Gesture Recognition with Real World Environment using Kinect: A Review Prakash S. Sawai 1, Prof. V. K. Shandilya 2 P.G. Student, Department of Computer Science & Engineering, Sipna COET, Amravati, Maharashtra,
Chapter 1 - Introduction
 1 "We all agree that your theory is crazy, but is it crazy enough?" Niels Bohr (1885-1962) Chapter 1 - Introduction Augmented reality (AR) is the registration of projected computer-generated images over
1 "We all agree that your theory is crazy, but is it crazy enough?" Niels Bohr (1885-1962) Chapter 1 - Introduction Augmented reality (AR) is the registration of projected computer-generated images over
Introduction to Virtual Reality (based on a talk by Bill Mark)
") Introduction to Virtual Reality (based on a talk by Bill Mark) I will talk about... Why do we want Virtual Reality? What is needed for a VR system? Examples of VR systems Research problems in VR Most Computers
Introduction to Virtual Reality (based on a talk by Bill Mark) I will talk about... Why do we want Virtual Reality? What is needed for a VR system? Examples of VR systems Research problems in VR Most Computers
Medical Robotics. Part II: SURGICAL ROBOTICS
 5 Medical Robotics Part II: SURGICAL ROBOTICS In the last decade, surgery and robotics have reached a maturity that has allowed them to be safely assimilated to create a new kind of operating room. This
5 Medical Robotics Part II: SURGICAL ROBOTICS In the last decade, surgery and robotics have reached a maturity that has allowed them to be safely assimilated to create a new kind of operating room. This
Craig Barnes. Previous Work. Introduction. Tools for Programming Agents
 From: AAAI Technical Report SS-00-04. Compilation copyright 2000, AAAI (www.aaai.org). All rights reserved. Visual Programming Agents for Virtual Environments Craig Barnes Electronic Visualization Lab
From: AAAI Technical Report SS-00-04. Compilation copyright 2000, AAAI (www.aaai.org). All rights reserved. Visual Programming Agents for Virtual Environments Craig Barnes Electronic Visualization Lab
Omni-Directional Catadioptric Acquisition System
 Technical Disclosure Commons Defensive Publications Series December 18, 2017 Omni-Directional Catadioptric Acquisition System Andreas Nowatzyk Andrew I. Russell Follow this and additional works at: http://www.tdcommons.org/dpubs_series
Technical Disclosure Commons Defensive Publications Series December 18, 2017 Omni-Directional Catadioptric Acquisition System Andreas Nowatzyk Andrew I. Russell Follow this and additional works at: http://www.tdcommons.org/dpubs_series
FP7 ICT Call 6: Cognitive Systems and Robotics
 FP7 ICT Call 6: Cognitive Systems and Robotics Information day Luxembourg, January 14, 2010 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media
FP7 ICT Call 6: Cognitive Systems and Robotics Information day Luxembourg, January 14, 2010 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media
YOUR GATEWAY TO ENDLESS OPPORTUNITIES
 IMPROVE HUMAN PERFORMANCE YOUR GATEWAY TO ENDLESS OPPORTUNITIES Setting standards for human movement research and treatment 1 EMPOWERING YOUR AMBITION Innovative technologies enable scientists to carry
IMPROVE HUMAN PERFORMANCE YOUR GATEWAY TO ENDLESS OPPORTUNITIES Setting standards for human movement research and treatment 1 EMPOWERING YOUR AMBITION Innovative technologies enable scientists to carry
Computer Haptics and Applications
 Computer Haptics and Applications EURON Summer School 2003 Cagatay Basdogan, Ph.D. College of Engineering Koc University, Istanbul, 80910 (http://network.ku.edu.tr/~cbasdogan) Resources: EURON Summer School
Computer Haptics and Applications EURON Summer School 2003 Cagatay Basdogan, Ph.D. College of Engineering Koc University, Istanbul, 80910 (http://network.ku.edu.tr/~cbasdogan) Resources: EURON Summer School
ENHANCED HUMAN-AGENT INTERACTION: AUGMENTING INTERACTION MODELS WITH EMBODIED AGENTS BY SERAFIN BENTO. MASTER OF SCIENCE in INFORMATION SYSTEMS
 BY SERAFIN BENTO MASTER OF SCIENCE in INFORMATION SYSTEMS Edmonton, Alberta September, 2015 ABSTRACT The popularity of software agents demands for more comprehensive HAI design processes. The outcome of
BY SERAFIN BENTO MASTER OF SCIENCE in INFORMATION SYSTEMS Edmonton, Alberta September, 2015 ABSTRACT The popularity of software agents demands for more comprehensive HAI design processes. The outcome of
Exploring Surround Haptics Displays
 Exploring Surround Haptics Displays Ali Israr Disney Research 4615 Forbes Ave. Suite 420, Pittsburgh, PA 15213 USA israr@disneyresearch.com Ivan Poupyrev Disney Research 4615 Forbes Ave. Suite 420, Pittsburgh,
Exploring Surround Haptics Displays Ali Israr Disney Research 4615 Forbes Ave. Suite 420, Pittsburgh, PA 15213 USA israr@disneyresearch.com Ivan Poupyrev Disney Research 4615 Forbes Ave. Suite 420, Pittsburgh,
Collaboration en Réalité Virtuelle
 Réalité Virtuelle et Interaction Collaboration en Réalité Virtuelle https://www.lri.fr/~cfleury/teaching/app5-info/rvi-2018/ Année 2017-2018 / APP5 Info à Polytech Paris-Sud Cédric Fleury (cedric.fleury@lri.fr)
Réalité Virtuelle et Interaction Collaboration en Réalité Virtuelle https://www.lri.fr/~cfleury/teaching/app5-info/rvi-2018/ Année 2017-2018 / APP5 Info à Polytech Paris-Sud Cédric Fleury (cedric.fleury@lri.fr)
Augmented Reality Mixed Reality
 Augmented Reality and Virtual Reality Augmented Reality Mixed Reality 029511-1 2008 년가을학기 11/17/2008 박경신 Virtual Reality Totally immersive environment Visual senses are under control of system (sometimes
Augmented Reality and Virtual Reality Augmented Reality Mixed Reality 029511-1 2008 년가을학기 11/17/2008 박경신 Virtual Reality Totally immersive environment Visual senses are under control of system (sometimes
Using Real Objects for Interaction Tasks in Immersive Virtual Environments
 Using Objects for Interaction Tasks in Immersive Virtual Environments Andy Boud, Dr. VR Solutions Pty. Ltd. andyb@vrsolutions.com.au Abstract. The use of immersive virtual environments for industrial applications
Using Objects for Interaction Tasks in Immersive Virtual Environments Andy Boud, Dr. VR Solutions Pty. Ltd. andyb@vrsolutions.com.au Abstract. The use of immersive virtual environments for industrial applications
VIEW: Visual Interactive Effective Worlds Lorentz Center International Center for workshops in the Sciences June Dr.
 Virtual Reality & Presence VIEW: Visual Interactive Effective Worlds Lorentz Center International Center for workshops in the Sciences 25-27 June 2007 Dr. Frederic Vexo Virtual Reality & Presence Outline:
Virtual Reality & Presence VIEW: Visual Interactive Effective Worlds Lorentz Center International Center for workshops in the Sciences 25-27 June 2007 Dr. Frederic Vexo Virtual Reality & Presence Outline:
UMI3D Unified Model for Interaction in 3D. White Paper
 UMI3D Unified Model for Interaction in 3D White Paper 30/04/2018 Introduction 2 The objectives of the UMI3D project are to simplify the collaboration between multiple and potentially asymmetrical devices
UMI3D Unified Model for Interaction in 3D White Paper 30/04/2018 Introduction 2 The objectives of the UMI3D project are to simplify the collaboration between multiple and potentially asymmetrical devices
Mobile Haptic Interaction with Extended Real or Virtual Environments
 Mobile Haptic Interaction with Extended Real or Virtual Environments Norbert Nitzsche Uwe D. Hanebeck Giinther Schmidt Institute of Automatic Control Engineering Technische Universitat Miinchen, 80290
Mobile Haptic Interaction with Extended Real or Virtual Environments Norbert Nitzsche Uwe D. Hanebeck Giinther Schmidt Institute of Automatic Control Engineering Technische Universitat Miinchen, 80290
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Augmented Reality. Virtuelle Realität Wintersemester 2007/08. Overview. Part 14:
 Part 14: Augmented Reality Virtuelle Realität Wintersemester 2007/08 Prof. Bernhard Jung Overview Introduction to Augmented Reality Augmented Reality Displays Examples AR Toolkit an open source software
Part 14: Augmented Reality Virtuelle Realität Wintersemester 2007/08 Prof. Bernhard Jung Overview Introduction to Augmented Reality Augmented Reality Displays Examples AR Toolkit an open source software
Affordance based Human Motion Synthesizing System
 Affordance based Human Motion Synthesizing System H. Ishii, N. Ichiguchi, D. Komaki, H. Shimoda and H. Yoshikawa Graduate School of Energy Science Kyoto University Uji-shi, Kyoto, 611-0011, Japan Abstract
Affordance based Human Motion Synthesizing System H. Ishii, N. Ichiguchi, D. Komaki, H. Shimoda and H. Yoshikawa Graduate School of Energy Science Kyoto University Uji-shi, Kyoto, 611-0011, Japan Abstract
Waves Nx VIRTUAL REALITY AUDIO
 Waves Nx VIRTUAL REALITY AUDIO WAVES VIRTUAL REALITY AUDIO THE FUTURE OF AUDIO REPRODUCTION AND CREATION Today s entertainment is on a mission to recreate the real world. Just as VR makes us feel like
Waves Nx VIRTUAL REALITY AUDIO WAVES VIRTUAL REALITY AUDIO THE FUTURE OF AUDIO REPRODUCTION AND CREATION Today s entertainment is on a mission to recreate the real world. Just as VR makes us feel like
Robotic System Simulation and Modeling Stefan Jörg Robotic and Mechatronic Center
 Robotic System Simulation and ing Stefan Jörg Robotic and Mechatronic Center Outline Introduction The SAFROS Robotic System Simulator Robotic System ing Conclusions Folie 2 DLR s Mirosurge: A versatile
Robotic System Simulation and ing Stefan Jörg Robotic and Mechatronic Center Outline Introduction The SAFROS Robotic System Simulator Robotic System ing Conclusions Folie 2 DLR s Mirosurge: A versatile