Self-learning Assistive Exoskeleton with Sliding Mode Admittance Control
|
|
|
- Jane Gilbert
- 5 years ago
- Views:
Transcription
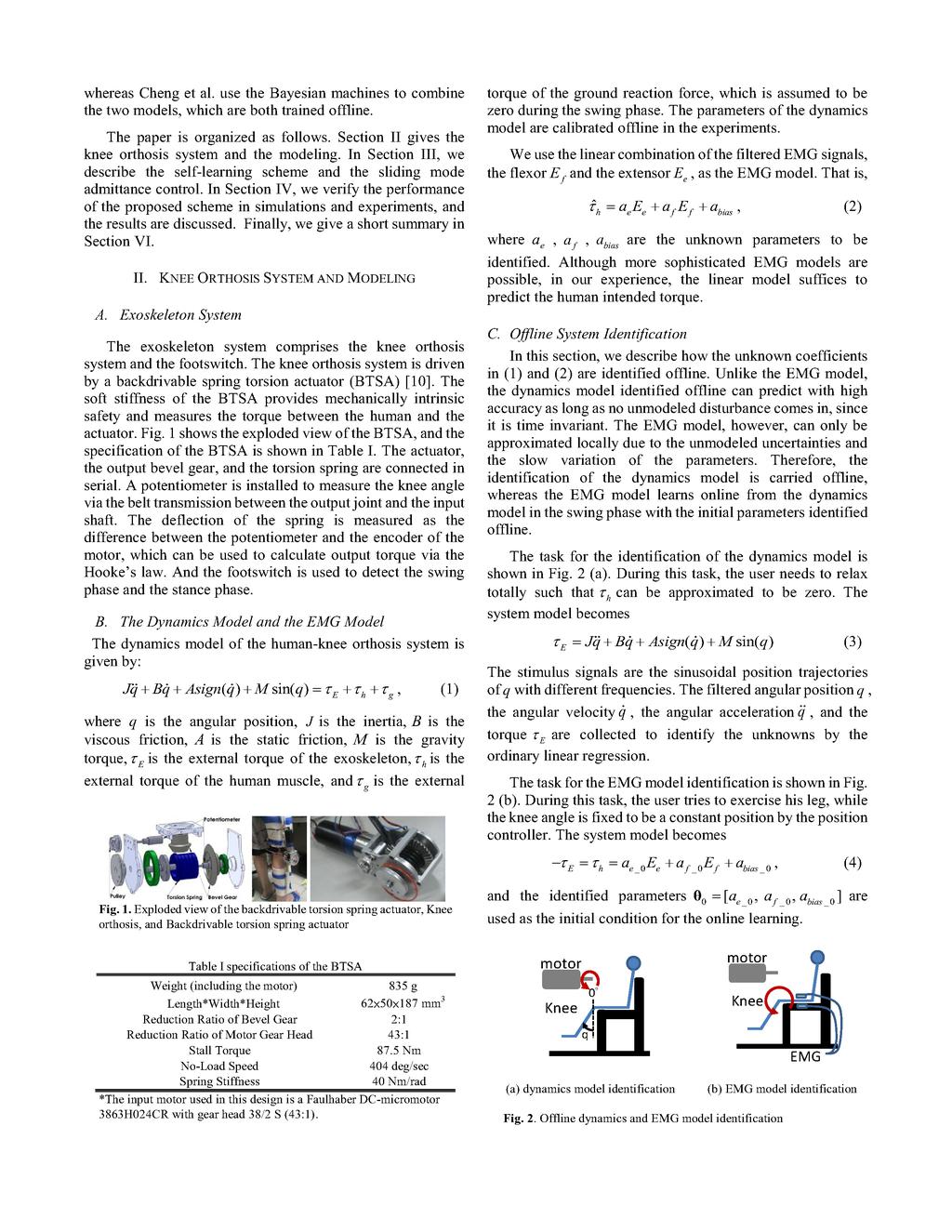
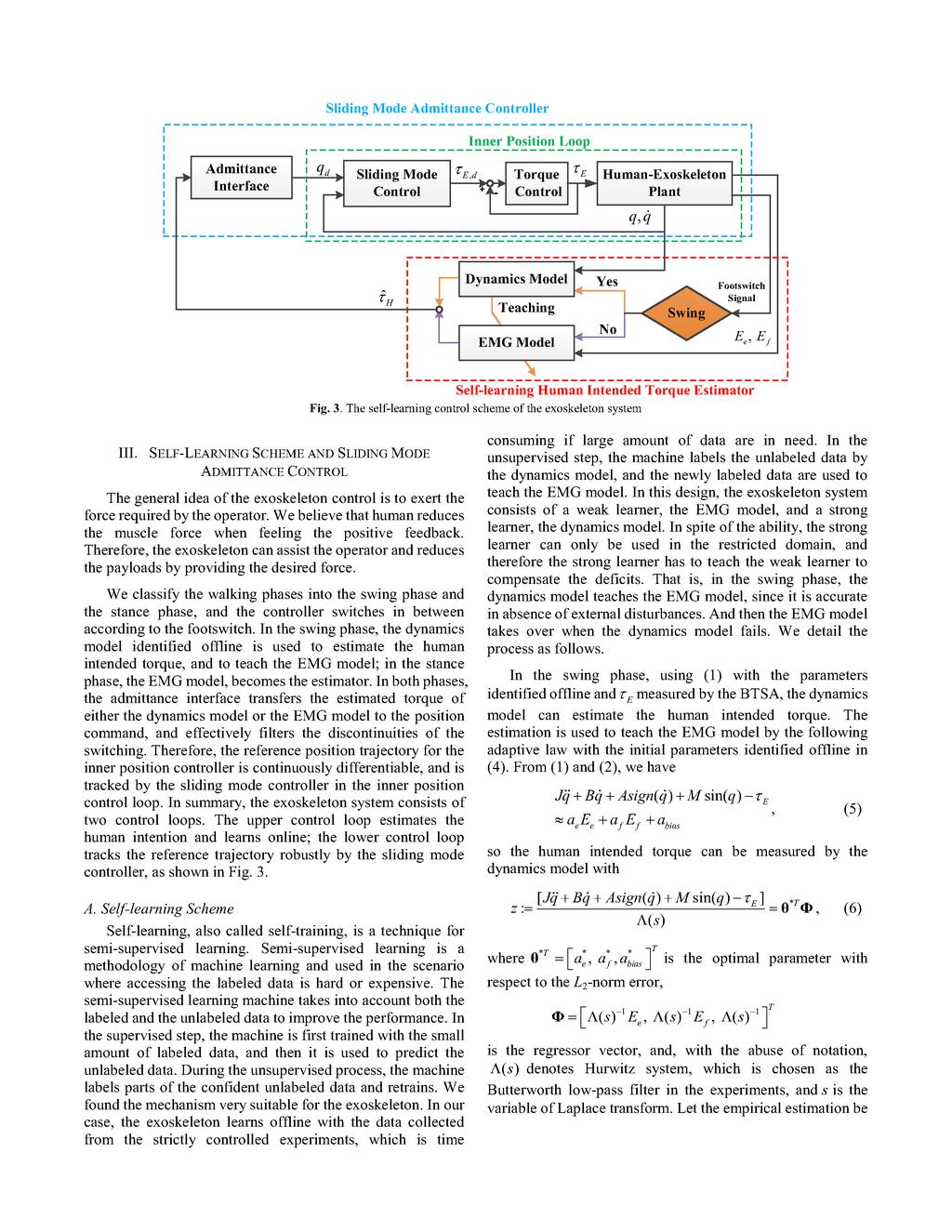
1 213 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, 213. Tokyo, Japan Self-learning Assistive Exoskeleton with Sliding Mode Admittance Control Tzu-Hao Huang, Ching-An Cheng, and Han-Pang Huang, Member, IEEE Abstract² Human intention estimation is important for assistive lower limb exoskeleton, and the task is realized mostly by the dynamics model or the EMG model. Although the dynamics model offers better estimation, it fails when unmodeled disturbances come into the system, such as the ground reaction force. In contrast, the EMG model is non-stationary, and therefore the offline calibrated EMG model is not satisfactory for long-time operation. In this paper, we propose the self-learning scheme with the sliding mode admittance control to overcome the deficiency. In the swing phase, the dynamics model is used to estimate the intention while teaching the EMG model; in the consecutive swing phase, the taught EMG model is used alternatively. In consequence, the self-learning control scheme provides better estimations during the whole operation. In addition, the admittance interface and the sliding mode controller ensure robust performance. The control scheme is justified by the knee orthosis with the backdrivable spring torsion actuator, and the experimental results are prominent. I. INTRODUCTION In design of the assistive exoskeleton, the estimation of the human intention is critical. By human intention, we mean the desired movement of the operator. According to different implementations, we categorize the literatures into two approaches. The first approach measures the interaction force between the exoskeleton and the operator with force sensors [1, 2]. However, this approach reduces the payloads only when the operator interacts with the surrounding. Exercising alone, the operator consumes at least the same work as that without the exoskeleton. The second approach is the model-based approach: the dynamics model [3, 4] and the Electromyography (EMG)-model [5, 6]. The dynamics model uses inverse dynamics to compute the human intended torque. However, the estimation error is large in the presence of the unmodeled disturbances. On the contrary, the EMG-model measures directly the level of the human intended torque by the activated EMG signal, but it suffers from the time-variant nature. Summarizing the literatures, most of the model-based exoskeleton systems can be regarded as the human torque amplifier, so the operator feels assisted even without the interaction with the environment. The EXO-UL7 [1] used three force sensors to estimate the interaction between human and robot, and the position trajectories of upper limber exoskeleton were generated by the admittance model. In [2], the similar admittance model was adopted with the force sensors on the fingers. Moreover, they T.-Z. Huang and C.-A. Cheng are with the Department of Mechanical Engineering, National Taiwan University, Taipei, Taiwan, 1617, R.O.C. H.-P. Huang is with the Department of Mechanical Engineering, National Taiwan University, Taipei, Taiwan, 1617, R.O.C. (Corresponding addressee included the sliding mode control to overcome the mechanical parameters uncertainties due to deflection of Bowden cables and the disturbance. In both designs, the objective is to minimize the interaction force between the user and the robot so that the robot follows the motion of the user. This design, however, does not directly minimize the loading of the operator. In fact, the control scheme only lowers the impedance between the exoskeleton and the user. In assistive applications, the exoskeleton should provide additional power to support the user. Considering the unmodeled disturbance in the dynamics model, the adaptive control in Knee Orthosis [7] tracked the predefined trajectory and adjusted the dynamics parameters online. In [8], they identified the parameters of the model for the lower limb offline, and controlled the knee orthosis by the high-order sliding model controller to overcome the uncertainty of the online parameter estimation. Because the robots in [7, 8] were used in rehabilitation, the position trajectories were predefined by the doctor or the user. No online feedback of the operator s intention is presented, yet it is crucial to estimate the human intention and to control the robot accordingly for assistive exoskeletons. Combing the benefits of both the dynamics model and the EMG model, we propose the self-learning scheme for human walking assistance with the sliding mode admittance control. During the swing phase, the inverse dynamics model estimates the human intended torque and teaches the EMG model with the estimation. The taught EMG model is then used in the consecutive stance phase to overcome the disturbance uncertainty in the dynamics model, such as the ground reaction force. The self-learning scheme updates the parameters of the EMG model so that it can adapt to the time variant nature. In summary, the estimator of the human intended torque switches between the dynamics model and the EMG model in the swing phase and in the stance phase, respectively, so the most accurate estimate of the two models can be always used for the assisting. With the estimation, we treat the human intention as the forced response of the estimated human intended torque exerting on a second-order linear system - the admittance interface. Finally, the sliding mode controller is used to overcome the uncertainties of modeling errors and disturbances. To the best of our knowledge, no other papers have investigated the adaptive estimation of the EMG model via self-learning. Our self-learning exoskeleton uses the dynamics model to teach EMG model so that the EMG model can cover for the dynamics when needed. The hybrid scheme overcomes the insufficiency of using only a single model. Compared to [9], the dynamics model, identified offline, serves as the supervisor and teaches the EMG model online in this paper, /13/$ IEEE 698
2 699
3 7
4 71
5 72
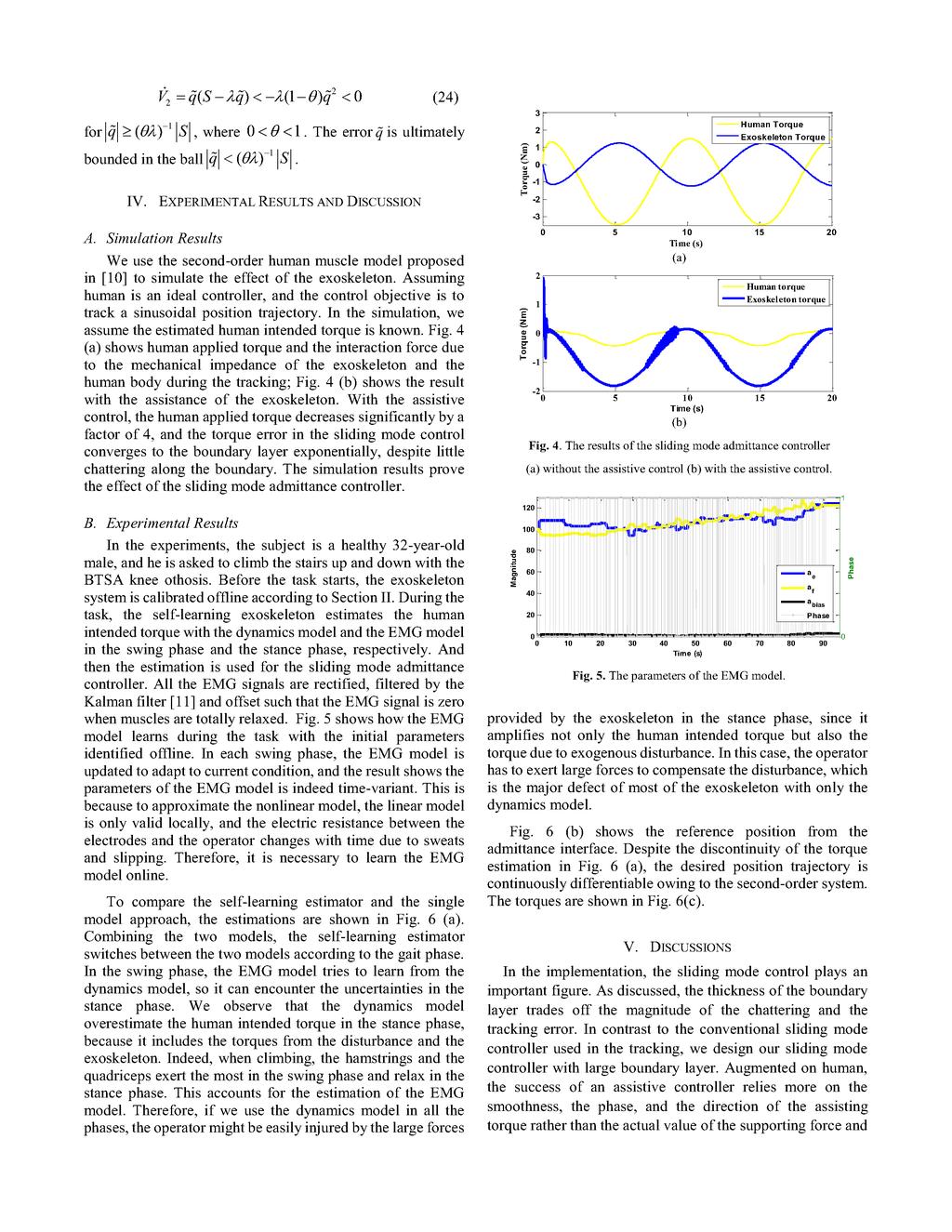
6 Angle (deg) Torque (Nm) Torque (Nm) 5 Hybrid human torque Human torque form dynamics Human torque from EMG Phase (:Stance 1:Swing) Time (s) (a) Actual angle Desired angle trajectory Phase (:Stance 1:Swing) Time (s) 5-5 (b) Exosksleton Torque Control Input Phase (:Stance 1:Swing) Time (s) (c) Fig. 6. (a) The self-learning estimator, the dynamics model, and the EMG model. (b) The actual angle and the desired angle generated from admittance interface. (c) The torque command of the sliding mode controller and exoskeleton torque. the position tracking error. With such knowledge, the boundary layer should be large as long as it pushes the exoskeleton from large tracking errors; inside the boundary, the sliding mode control is actually a proportional feedback controller to provide smooth assisting. In the experiments, we observe that the optimal parameters of the admittance interface vary with the configurations and the tasks. It is interesting that human expect different impedance with various poses. We suggest identify the task-dependent impedance and use the gain scheduling technique to control the impedance system in the future works. Also, the learning rate affects the performance of the EMG model very much. With small learning rate, the EMG model cannot learn fast enough within the short swing phase, while the learning becomes more unstable when large learning rate is used. Therefore, the learning rate trades off the performance and the stability. We hope this can be addressed by incorporating the adaptive learning rate and the Hessian matrix. Finally, we are considering whether the robust control approach is suitable in the application of exoskeleton. Most of the robust control uses finite bounds for the disturbances and the uncertainty, and forces the tracking error to stay within some bounded domain. On the other hand, the interaction with 1 Phase 1 1 Phase Phase human does not emphasize the absolute error. Indeed, only the bandwidth and smoothness do matter. In our experiences, human seems to be able to adapt to the errors easily as long as the bandwidth is limited. VI. CONCLUSION In this paper, we propose the self-learning scheme with the sliding mode admittance controller for the assistive exoskeleton system. The self-learning scheme combines both the dynamics model and the EMG model to achieve better performance. In the swing phase, the dynamics model teaches the EMG model, so that the estimated human intended torque can tolerate the disturbance uncertainties in the stance phase. Together, the estimator uses the dynamics model in the swing phase and the updated EMG in the stance phase. With the estimated human intended torque, the sliding mode admittance controller assists the operator robustly. In the future works, we want to address the issue of pose-dependent desired impedance and design a more sophisticated self-learning scheme. REFERENCES [1] W. Yu, J. Rosen, and X. Li, "PID admittance control for an upper limb exoskeleton," American Control Conference, San Francisco, CA, 211, pp [2] A. Wege, K. Kondak, and G. Hommel, "Force control strategy for a hand exoskeleton based on sliding mode position control," IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, 26, pp [3] H. Kazerooni and A. Chu, "Biomechanical Design of the Berkeley Lower Extremity Exoskeleton (BLEEX)," IEEE/ASME Transactions on Mechatronics, vol. 11, No. 2, pp , April 26. [4] K. Kong and M. Tomizuka, "Control of exoskeletons inspired by fictitious gain in human model," IEEE/ASME Transactions on Mechatronics, vol. 14, No. 6, pp , December 29. [5] T. Hayashi, H. Kawamoto, and Y. Sankai, "Control method of robot suit HAL working as operator's muscle using biological and dynamical information," IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, Alberta, Canada, 25, pp [6] K. Kiguchi, T. Tanaka, and T. Fukuda, "Neuro-fuzzy control of a robotic exoskeleton with EMG signals," IEEE Transactions on Fuzzy Systems, vol. 12, No. 4, pp , August 24. [7] H. Rifai, S. Mohammed, B. Daachi, and Y. Amirat, "Adaptive control of a human-driven knee joint orthosis," IEEE International Conference on Robotics and Automation, Saint Paul, MN, 212, pp [8] S. Mefoued, S. Mohammed, and Y. Amirat, "Knee joint movement assistance through robust control of an actuated orthosis," IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, 211, pp [9] C.-A. Cheng, T.-H. Huang, and H.-P. Huang, "Bayesian Human Intention Estimator for Exoskeleton System " IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Wollongong, Australia, 213. [1]T.-H. Huang, H.-P. Huang, C.-A. Cheng, J.-Y. Kuan, P.-T. Lee, and S.-Y. Huang, "Design of a new hybrid control and knee orthosis for human walking and rehabilitation," IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura-Algarve, Portugal, 212, pp [11] J.-Y. Kuan, T.-H. Huang, and H.-P. Huang, "Human intention estimation method for a new compliant rehabilitation and assistive robot," Proceedings of SICE Annual Conference, Taipei, 21, pp
2280. Optimization of the control scheme for human extremity exoskeleton
 2280. Optimization of the control scheme for human extremity exoskeleton Yang Li 1, Cheng Xu 2, Xiaorong Guan 3, Zhong Li 4 School of Mechanical Engineering 105, Nanjing University of Science and Technology,
2280. Optimization of the control scheme for human extremity exoskeleton Yang Li 1, Cheng Xu 2, Xiaorong Guan 3, Zhong Li 4 School of Mechanical Engineering 105, Nanjing University of Science and Technology,
Stationary Torque Replacement for Evaluation of Active Assistive Devices using Humanoid
 2016 IEEE-RAS 16th International Conference on Humanoid Robots (Humanoids) Cancun, Mexico, Nov 15-17, 2016 Stationary Torque Replacement for Evaluation of Active Assistive Devices using Humanoid Takahiro
2016 IEEE-RAS 16th International Conference on Humanoid Robots (Humanoids) Cancun, Mexico, Nov 15-17, 2016 Stationary Torque Replacement for Evaluation of Active Assistive Devices using Humanoid Takahiro
BAE, JOONBUM. Assistant Professor School of Mechanical and Advanced Materials Engineering, UNIST
 BAE, JOONBUM Rm. 501-9, Engineering Building 1 Mobile : 82-10-3384-0117 School of Mechanical and Advanced Materials Engineering Office: 82-52-217-2335 UNIST Ulsan, Korea Email : jbbae@unist.ac.kr Homepage:
BAE, JOONBUM Rm. 501-9, Engineering Building 1 Mobile : 82-10-3384-0117 School of Mechanical and Advanced Materials Engineering Office: 82-52-217-2335 UNIST Ulsan, Korea Email : jbbae@unist.ac.kr Homepage:
The Haptic Impendance Control through Virtual Environment Force Compensation
 The Haptic Impendance Control through Virtual Environment Force Compensation OCTAVIAN MELINTE Robotics and Mechatronics Department Institute of Solid Mechanicsof the Romanian Academy ROMANIA octavian.melinte@yahoo.com
The Haptic Impendance Control through Virtual Environment Force Compensation OCTAVIAN MELINTE Robotics and Mechatronics Department Institute of Solid Mechanicsof the Romanian Academy ROMANIA octavian.melinte@yahoo.com
Dynamic analysis and control of a Hybrid serial/cable driven robot for lower-limb rehabilitation
 Dynamic analysis and control of a Hybrid serial/cable driven robot for lower-limb rehabilitation M. Ismail 1, S. Lahouar 2 and L. Romdhane 1,3 1 Mechanical Laboratory of Sousse (LMS), National Engineering
Dynamic analysis and control of a Hybrid serial/cable driven robot for lower-limb rehabilitation M. Ismail 1, S. Lahouar 2 and L. Romdhane 1,3 1 Mechanical Laboratory of Sousse (LMS), National Engineering
On Observer-based Passive Robust Impedance Control of a Robot Manipulator
 Journal of Mechanics Engineering and Automation 7 (2017) 71-78 doi: 10.17265/2159-5275/2017.02.003 D DAVID PUBLISHING On Observer-based Passive Robust Impedance Control of a Robot Manipulator CAO Sheng,
Journal of Mechanics Engineering and Automation 7 (2017) 71-78 doi: 10.17265/2159-5275/2017.02.003 D DAVID PUBLISHING On Observer-based Passive Robust Impedance Control of a Robot Manipulator CAO Sheng,
sin( x m cos( The position of the mass point D is specified by a set of state variables, (θ roll, θ pitch, r) related to the Cartesian coordinates by:
 related to the Cartesian coordinates by:") Research Article International Journal of Current Engineering and Technology ISSN 77-46 3 INPRESSCO. All Rights Reserved. Available at http://inpressco.com/category/ijcet Modeling improvement of a Humanoid
Research Article International Journal of Current Engineering and Technology ISSN 77-46 3 INPRESSCO. All Rights Reserved. Available at http://inpressco.com/category/ijcet Modeling improvement of a Humanoid
Biologically Inspired Robot Manipulator for New Applications in Automation Engineering
 Preprint of the paper which appeared in the Proc. of Robotik 2008, Munich, Germany, June 11-12, 2008 Biologically Inspired Robot Manipulator for New Applications in Automation Engineering Dipl.-Biol. S.
Preprint of the paper which appeared in the Proc. of Robotik 2008, Munich, Germany, June 11-12, 2008 Biologically Inspired Robot Manipulator for New Applications in Automation Engineering Dipl.-Biol. S.
Mathematical modeling and control of lower extremity exoskeleton.
 Biomedical Research 018; 9 (9): 197-195 ISSN 0970-938X www.biomedres.info Mathematical modeling and control of lower extremity exoskeleton. Alper K Tanyildizi, Oğuz Yakut, Beyda Tasar * Department of Mechatronic
Biomedical Research 018; 9 (9): 197-195 ISSN 0970-938X www.biomedres.info Mathematical modeling and control of lower extremity exoskeleton. Alper K Tanyildizi, Oğuz Yakut, Beyda Tasar * Department of Mechatronic
Shuguang Huang, Ph.D Research Assistant Professor Department of Mechanical Engineering Marquette University Milwaukee, WI
 Shuguang Huang, Ph.D Research Assistant Professor Department of Mechanical Engineering Marquette University Milwaukee, WI 53201 huangs@marquette.edu RESEARCH INTEREST: Dynamic systems. Analysis and physical
Shuguang Huang, Ph.D Research Assistant Professor Department of Mechanical Engineering Marquette University Milwaukee, WI 53201 huangs@marquette.edu RESEARCH INTEREST: Dynamic systems. Analysis and physical
Information and Program
 Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
An Intuitional Method for Mobile Robot Path-planning in a Dynamic Environment
 An Intuitional Method for Mobile Robot Path-planning in a Dynamic Environment Ching-Chang Wong, Hung-Ren Lai, and Hui-Chieh Hou Department of Electrical Engineering, Tamkang University Tamshui, Taipei
An Intuitional Method for Mobile Robot Path-planning in a Dynamic Environment Ching-Chang Wong, Hung-Ren Lai, and Hui-Chieh Hou Department of Electrical Engineering, Tamkang University Tamshui, Taipei
Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free Human Following Navigation in Outdoor Environment
 Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
Proceedings of the International MultiConference of Engineers and Computer Scientists 2016 Vol I,, March 16-18, 2016, Hong Kong Motion Control of a Three Active Wheeled Mobile Robot and Collision-Free
ANTI-WINDUP SCHEME FOR PRACTICAL CONTROL OF POSITIONING SYSTEMS
 ANTI-WINDUP SCHEME FOR PRACTICAL CONTROL OF POSITIONING SYSTEMS WAHYUDI, TARIG FAISAL AND ABDULGANI ALBAGUL Department of Mechatronics Engineering, International Islamic University, Malaysia, Jalan Gombak,
ANTI-WINDUP SCHEME FOR PRACTICAL CONTROL OF POSITIONING SYSTEMS WAHYUDI, TARIG FAISAL AND ABDULGANI ALBAGUL Department of Mechatronics Engineering, International Islamic University, Malaysia, Jalan Gombak,
Glossary of terms. Short explanation
 Glossary Concept Module. Video Short explanation Abstraction 2.4 Capturing the essence of the behavior of interest (getting a model or representation) Action in the control Derivative 4.2 The control signal
Glossary Concept Module. Video Short explanation Abstraction 2.4 Capturing the essence of the behavior of interest (getting a model or representation) Action in the control Derivative 4.2 The control signal
Shuffle Traveling of Humanoid Robots
 Shuffle Traveling of Humanoid Robots Masanao Koeda, Masayuki Ueno, and Takayuki Serizawa Abstract Recently, many researchers have been studying methods for the stepless slip motion of humanoid robots.
Shuffle Traveling of Humanoid Robots Masanao Koeda, Masayuki Ueno, and Takayuki Serizawa Abstract Recently, many researchers have been studying methods for the stepless slip motion of humanoid robots.
PID CONTROLLERS DESIGN APPLIED TO POSITIONING OF BALL ON THE STEWART PLATFORM
 DOI 1.2478/ama-214-39 PID CONTROLLERS DESIGN APPLIED TO POSITIONING OF BALL ON THE STEWART PLATFORM Andrzej KOSZEWNIK *, Kamil TROC *, Maciej SŁOWIK * * Faculty of Mechanical Engineering, Bialystok University
DOI 1.2478/ama-214-39 PID CONTROLLERS DESIGN APPLIED TO POSITIONING OF BALL ON THE STEWART PLATFORM Andrzej KOSZEWNIK *, Kamil TROC *, Maciej SŁOWIK * * Faculty of Mechanical Engineering, Bialystok University
Structure Specified Robust H Loop Shaping Control of a MIMO Electro-hydraulic Servo System using Particle Swarm Optimization
 Structure Specified Robust H Loop Shaping Control of a MIMO Electrohydraulic Servo System using Particle Swarm Optimization Piyapong Olranthichachat and Somyot aitwanidvilai Abstract A fixedstructure controller
Structure Specified Robust H Loop Shaping Control of a MIMO Electrohydraulic Servo System using Particle Swarm Optimization Piyapong Olranthichachat and Somyot aitwanidvilai Abstract A fixedstructure controller
Position and Force Control of Teleoperation System Based on PHANTOM Omni Robots
 International Journal of Mechanical Engineering and Robotics Research Vol. 5, No., January 6 Position and Force Control of Teleoperation System Based on PHANTOM Omni Robots Rong Kong, Xiucheng Dong, and
International Journal of Mechanical Engineering and Robotics Research Vol. 5, No., January 6 Position and Force Control of Teleoperation System Based on PHANTOM Omni Robots Rong Kong, Xiucheng Dong, and
ANFIS-PID Controller for Arm Rehabilitation Device
 ANFIS-PID Controller for Arm Rehabilitation Device M.H.Jali a,1, N.E.S.Mustafa a,2, T.A.Izzuddin a,3, R.Ghazali a,4, H.I.Jaafar a,5 a Faculty of Electrical Engineering, Universiti Teknikal Malaysia Melaka
ANFIS-PID Controller for Arm Rehabilitation Device M.H.Jali a,1, N.E.S.Mustafa a,2, T.A.Izzuddin a,3, R.Ghazali a,4, H.I.Jaafar a,5 a Faculty of Electrical Engineering, Universiti Teknikal Malaysia Melaka
HAND-SHAPED INTERFACE FOR INTUITIVE HUMAN- ROBOT COMMUNICATION THROUGH HAPTIC MEDIA
 HAND-SHAPED INTERFACE FOR INTUITIVE HUMAN- ROBOT COMMUNICATION THROUGH HAPTIC MEDIA RIKU HIKIJI AND SHUJI HASHIMOTO Department of Applied Physics, School of Science and Engineering, Waseda University 3-4-1
HAND-SHAPED INTERFACE FOR INTUITIVE HUMAN- ROBOT COMMUNICATION THROUGH HAPTIC MEDIA RIKU HIKIJI AND SHUJI HASHIMOTO Department of Applied Physics, School of Science and Engineering, Waseda University 3-4-1
Elements of Haptic Interfaces
 Elements of Haptic Interfaces Katherine J. Kuchenbecker Department of Mechanical Engineering and Applied Mechanics University of Pennsylvania kuchenbe@seas.upenn.edu Course Notes for MEAM 625, University
Elements of Haptic Interfaces Katherine J. Kuchenbecker Department of Mechanical Engineering and Applied Mechanics University of Pennsylvania kuchenbe@seas.upenn.edu Course Notes for MEAM 625, University
Research Article Research of Smart Car s Speed Control Based on the Internal Model Control
 Abstract and Applied Analysis, Article ID 274293, 5 pages http://dx.doi.org/.55/24/274293 Research Article Research of Smart Car s Speed Control Based on the Internal Model Control Han Yu, Hamid Reza Karimi,
Abstract and Applied Analysis, Article ID 274293, 5 pages http://dx.doi.org/.55/24/274293 Research Article Research of Smart Car s Speed Control Based on the Internal Model Control Han Yu, Hamid Reza Karimi,
Design Of PID Controller In Automatic Voltage Regulator (AVR) System Using PSO Technique
 System Using PSO Technique") Design Of PID Controller In Automatic Voltage Regulator (AVR) System Using PSO Technique Vivek Kumar Bhatt 1, Dr. Sandeep Bhongade 2 1,2 Department of Electrical Engineering, S. G. S. Institute of Technology
Design Of PID Controller In Automatic Voltage Regulator (AVR) System Using PSO Technique Vivek Kumar Bhatt 1, Dr. Sandeep Bhongade 2 1,2 Department of Electrical Engineering, S. G. S. Institute of Technology
Department of Robotics Ritsumeikan University
 Department of Robotics Ritsumeikan University Shinichi Hirai Dept. Robotics Ritsumeikan Univ. Hanoi Institute of Technology Hanoi, Vietnam, Dec. 20, 2008 http://www.ritsumei.ac.jp/se/rm/robo/index-e.htm
Department of Robotics Ritsumeikan University Shinichi Hirai Dept. Robotics Ritsumeikan Univ. Hanoi Institute of Technology Hanoi, Vietnam, Dec. 20, 2008 http://www.ritsumei.ac.jp/se/rm/robo/index-e.htm
ISSN: [Appana* et al., 5(10): October, 2016] Impact Factor: 4.116
![ISSN: [Appana* et al., 5(10): October, 2016] Impact Factor: 4.116](/thumbs/86/93653751.jpg "ISSN: [Appana* et al., 5(10): October, 2016] Impact Factor: 4.116") IJESRT INTERNATIONAL JOURNAL OF ENGINEERING SCIENCES & RESEARCH TECHNOLOGY FUZZY LOGIC CONTROL BASED PID CONTROLLER FOR STEP DOWN DC-DC POWER CONVERTER Dileep Kumar Appana *, Muhammed Sohaib * Lead Application
IJESRT INTERNATIONAL JOURNAL OF ENGINEERING SCIENCES & RESEARCH TECHNOLOGY FUZZY LOGIC CONTROL BASED PID CONTROLLER FOR STEP DOWN DC-DC POWER CONVERTER Dileep Kumar Appana *, Muhammed Sohaib * Lead Application
Research Proposal: Autonomous Mobile Robot Platform for Indoor Applications :xwgn zrvd ziad mipt ineyiil zinepehe`e zciip ziheaex dnxethlt
 Research Proposal: Autonomous Mobile Robot Platform for Indoor Applications :xwgn zrvd ziad mipt ineyiil zinepehe`e zciip ziheaex dnxethlt Igal Loevsky, advisor: Ilan Shimshoni email: igal@tx.technion.ac.il
Research Proposal: Autonomous Mobile Robot Platform for Indoor Applications :xwgn zrvd ziad mipt ineyiil zinepehe`e zciip ziheaex dnxethlt Igal Loevsky, advisor: Ilan Shimshoni email: igal@tx.technion.ac.il
Development of Flexible Pneumatic Cylinder with Backdrivability and Its Application
 Development of Flexible Pneumatic Cylinder with Backdrivability and Its Application Takafumi Morimoto, Mohd Aliff, Tetsuya Akagi, and Shujiro Dohta Department of Intelligent Mechanical Engineering, Okayama
Development of Flexible Pneumatic Cylinder with Backdrivability and Its Application Takafumi Morimoto, Mohd Aliff, Tetsuya Akagi, and Shujiro Dohta Department of Intelligent Mechanical Engineering, Okayama
Design Applications of Synchronized Controller for Micro Precision Servo Press Machine
 International Journal of Electrical Energy, Vol, No, March Design Applications of Synchronized Controller for Micro Precision Servo Press Machine ShangLiang Chen and HoaiNam Dinh Institute of Manufacturing
International Journal of Electrical Energy, Vol, No, March Design Applications of Synchronized Controller for Micro Precision Servo Press Machine ShangLiang Chen and HoaiNam Dinh Institute of Manufacturing
An Exoskeletal Robot for Human Shoulder Joint Motion Assist
 IEEE/ASME TRANSACTIONS ON MECHATRONICS, VOL. 8, NO. 1, MARCH 2003 125 An Exoskeletal Robot for Human Shoulder Joint Motion Assist Kazuo Kiguchi, Member, IEEE, Koya Iwami, Makoto Yasuda, Keigo Watanabe,
IEEE/ASME TRANSACTIONS ON MECHATRONICS, VOL. 8, NO. 1, MARCH 2003 125 An Exoskeletal Robot for Human Shoulder Joint Motion Assist Kazuo Kiguchi, Member, IEEE, Koya Iwami, Makoto Yasuda, Keigo Watanabe,
International Journal of Advance Engineering and Research Development
 Scientific Journal of Impact Factor (SJIF): 4.14 International Journal of Advance Engineering and Research Development Volume 3, Issue 2, February -2016 e-issn (O): 2348-4470 p-issn (P): 2348-6406 SIMULATION
Scientific Journal of Impact Factor (SJIF): 4.14 International Journal of Advance Engineering and Research Development Volume 3, Issue 2, February -2016 e-issn (O): 2348-4470 p-issn (P): 2348-6406 SIMULATION
PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES
 Bulletin of the Transilvania University of Braşov Series I: Engineering Sciences Vol. 6 (55) No. 2-2013 PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES A. FRATU 1 M. FRATU 2 Abstract:
Bulletin of the Transilvania University of Braşov Series I: Engineering Sciences Vol. 6 (55) No. 2-2013 PHYSICAL ROBOTS PROGRAMMING BY IMITATION USING VIRTUAL ROBOT PROTOTYPES A. FRATU 1 M. FRATU 2 Abstract:
CS545 Contents XIV. Components of a Robotic System. Signal Processing. Reading Assignment for Next Class
 CS545 Contents XIV Components of a Robotic System Power Supplies and Power Amplifiers Actuators Transmission Sensors Signal Processing Linear filtering Simple filtering Optimal filtering Reading Assignment
CS545 Contents XIV Components of a Robotic System Power Supplies and Power Amplifiers Actuators Transmission Sensors Signal Processing Linear filtering Simple filtering Optimal filtering Reading Assignment
Wednesday, October 29, :00-04:00pm EB: 3546D. TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof.
 Wednesday, October 29, 2014 02:00-04:00pm EB: 3546D TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof. Ning Xi ABSTRACT Mobile manipulators provide larger working spaces and more flexibility
Wednesday, October 29, 2014 02:00-04:00pm EB: 3546D TELEOPERATION OF MOBILE MANIPULATORS By Yunyi Jia Advisor: Prof. Ning Xi ABSTRACT Mobile manipulators provide larger working spaces and more flexibility
phri: specialization groups HS PRELIMINARY
 phri: specialization groups HS 2019 - PRELIMINARY 1) VELOCITY ESTIMATION WITH HALL EFFECT SENSOR 2) VELOCITY MEASUREMENT: TACHOMETER VS HALL SENSOR 3) POSITION AND VELOCTIY ESTIMATION BASED ON KALMAN FILTER
phri: specialization groups HS 2019 - PRELIMINARY 1) VELOCITY ESTIMATION WITH HALL EFFECT SENSOR 2) VELOCITY MEASUREMENT: TACHOMETER VS HALL SENSOR 3) POSITION AND VELOCTIY ESTIMATION BASED ON KALMAN FILTER
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics
 Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
Chapter 2 Introduction to Haptics 2.1 Definition of Haptics The word haptic originates from the Greek verb hapto to touch and therefore refers to the ability to touch and manipulate objects. The haptic
MECHATRONICS IN BIOMEDICAL APPLICATIONS AND BIOMECHATRONICS
 MECHATRONICS IN BIOMEDICAL APPLICATIONS AND BIOMECHATRONICS Job van Amerongen Cornelis J. Drebbel Research Institute for Systems Engineering, Faculty of Electrical Engineering, University of Twente, P.O.
MECHATRONICS IN BIOMEDICAL APPLICATIONS AND BIOMECHATRONICS Job van Amerongen Cornelis J. Drebbel Research Institute for Systems Engineering, Faculty of Electrical Engineering, University of Twente, P.O.
Application of congestion control algorithms for the control of a large number of actuators with a matrix network drive system
 Application of congestion control algorithms for the control of a large number of actuators with a matrix networ drive system Kyu-Jin Cho and Harry Asada d Arbeloff Laboratory for Information Systems and
Application of congestion control algorithms for the control of a large number of actuators with a matrix networ drive system Kyu-Jin Cho and Harry Asada d Arbeloff Laboratory for Information Systems and
Development of a Walking Support Robot with Velocity-based Mechanical Safety Devices*
 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, 2013. Tokyo, Japan Development of a Walking Support Robot with Velocity-based Mechanical Safety Devices* Yoshihiro
2013 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, 2013. Tokyo, Japan Development of a Walking Support Robot with Velocity-based Mechanical Safety Devices* Yoshihiro
Design and Control of the BUAA Four-Fingered Hand
 Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Design and Control of the BUAA Four-Fingered Hand Y. Zhang, Z. Han, H. Zhang, X. Shang, T. Wang,
Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Design and Control of the BUAA Four-Fingered Hand Y. Zhang, Z. Han, H. Zhang, X. Shang, T. Wang,
Robots Learning from Robots: A proof of Concept Study for Co-Manipulation Tasks. Luka Peternel and Arash Ajoudani Presented by Halishia Chugani
 Robots Learning from Robots: A proof of Concept Study for Co-Manipulation Tasks Luka Peternel and Arash Ajoudani Presented by Halishia Chugani Robots learning from humans 1. Robots learn from humans 2.
Robots Learning from Robots: A proof of Concept Study for Co-Manipulation Tasks Luka Peternel and Arash Ajoudani Presented by Halishia Chugani Robots learning from humans 1. Robots learn from humans 2.
Designing Better Industrial Robots with Adams Multibody Simulation Software
 Designing Better Industrial Robots with Adams Multibody Simulation Software MSC Software: Designing Better Industrial Robots with Adams Multibody Simulation Software Introduction Industrial robots are
Designing Better Industrial Robots with Adams Multibody Simulation Software MSC Software: Designing Better Industrial Robots with Adams Multibody Simulation Software Introduction Industrial robots are
Design of a Compliant and Force Sensing Hand for a Humanoid Robot
 Design of a Compliant and Force Sensing Hand for a Humanoid Robot Aaron Edsinger-Gonzales Computer Science and Artificial Intelligence Laboratory, assachusetts Institute of Technology E-mail: edsinger@csail.mit.edu
Design of a Compliant and Force Sensing Hand for a Humanoid Robot Aaron Edsinger-Gonzales Computer Science and Artificial Intelligence Laboratory, assachusetts Institute of Technology E-mail: edsinger@csail.mit.edu
Position Control of AC Servomotor Using Internal Model Control Strategy
 Position Control of AC Servomotor Using Internal Model Control Strategy Ahmed S. Abd El-hamid and Ahmed H. Eissa Corresponding Author email: Ahmednrc64@gmail.com Abstract: This paper focuses on the design
Position Control of AC Servomotor Using Internal Model Control Strategy Ahmed S. Abd El-hamid and Ahmed H. Eissa Corresponding Author email: Ahmednrc64@gmail.com Abstract: This paper focuses on the design
SCIENTIFIC CURRICULUM VITAE
 SCIENTIFIC CURRICULUM VITAE I. Personal information. Full name: Thanh Phong Dao. Birthday: 9/08/98 3. Sex: Male 4. Profession: Full-time researcher 5. Academic degree: Doctoral degree Year of issue: 05
SCIENTIFIC CURRICULUM VITAE I. Personal information. Full name: Thanh Phong Dao. Birthday: 9/08/98 3. Sex: Male 4. Profession: Full-time researcher 5. Academic degree: Doctoral degree Year of issue: 05
Improving a pipeline hybrid dynamic model using 2DOF PID
 Improving a pipeline hybrid dynamic model using 2DOF PID Yongxiang Wang 1, A. H. El-Sinawi 2, Sami Ainane 3 The Petroleum Institute, Abu Dhabi, United Arab Emirates 2 Corresponding author E-mail: 1 yowang@pi.ac.ae,
Improving a pipeline hybrid dynamic model using 2DOF PID Yongxiang Wang 1, A. H. El-Sinawi 2, Sami Ainane 3 The Petroleum Institute, Abu Dhabi, United Arab Emirates 2 Corresponding author E-mail: 1 yowang@pi.ac.ae,
Real-Time Bilateral Control for an Internet-Based Telerobotic System
 708 Real-Time Bilateral Control for an Internet-Based Telerobotic System Jahng-Hyon PARK, Joonyoung PARK and Seungjae MOON There is a growing tendency to use the Internet as the transmission medium of
708 Real-Time Bilateral Control for an Internet-Based Telerobotic System Jahng-Hyon PARK, Joonyoung PARK and Seungjae MOON There is a growing tendency to use the Internet as the transmission medium of
A DUAL MODE EMG-CONTROLLED ROBOTIC ORTHOSIS
 VOL., NO., JANUARY 06 ISSN 89-6608 006-06 Asian Research Publishing Network (ARPN). All rights reserved. A DUAL MODE EMG-CONTROLLED ROBOTIC ORTHOSIS Ser Lii Chong, Charles Theam-Chun Wong, Chi Hong Lo,
VOL., NO., JANUARY 06 ISSN 89-6608 006-06 Asian Research Publishing Network (ARPN). All rights reserved. A DUAL MODE EMG-CONTROLLED ROBOTIC ORTHOSIS Ser Lii Chong, Charles Theam-Chun Wong, Chi Hong Lo,
Modeling and Control of a Robot Arm on a Two Wheeled Moving Platform Mert Onkol 1,a, Cosku Kasnakoglu 1,b
 Applied Mechanics and Materials Vols. 789-79 (15) pp 735-71 (15) Trans Tech Publications, Switzerland doi:1.8/www.scientific.net/amm.789-79.735 Modeling and Control of a Robot Arm on a Two Wheeled Moving
Applied Mechanics and Materials Vols. 789-79 (15) pp 735-71 (15) Trans Tech Publications, Switzerland doi:1.8/www.scientific.net/amm.789-79.735 Modeling and Control of a Robot Arm on a Two Wheeled Moving
NAVIGATION OF MOBILE ROBOT USING THE PSO PARTICLE SWARM OPTIMIZATION
 Journal of Academic and Applied Studies (JAAS) Vol. 2(1) Jan 2012, pp. 32-38 Available online @ www.academians.org ISSN1925-931X NAVIGATION OF MOBILE ROBOT USING THE PSO PARTICLE SWARM OPTIMIZATION Sedigheh
Journal of Academic and Applied Studies (JAAS) Vol. 2(1) Jan 2012, pp. 32-38 Available online @ www.academians.org ISSN1925-931X NAVIGATION OF MOBILE ROBOT USING THE PSO PARTICLE SWARM OPTIMIZATION Sedigheh
Active sway control of a gantry crane using hybrid input shaping and PID control schemes
 Home Search Collections Journals About Contact us My IOPscience Active sway control of a gantry crane using hybrid input shaping and PID control schemes This content has been downloaded from IOPscience.
Home Search Collections Journals About Contact us My IOPscience Active sway control of a gantry crane using hybrid input shaping and PID control schemes This content has been downloaded from IOPscience.
A Sliding Mode Controller for a Three Phase Induction Motor
 A Sliding Mode Controller for a Three Phase Induction Motor Eman El-Gendy Demonstrator at Computers and systems engineering, Mansoura University, Egypt Sabry F. Saraya Assistant professor at Computers
A Sliding Mode Controller for a Three Phase Induction Motor Eman El-Gendy Demonstrator at Computers and systems engineering, Mansoura University, Egypt Sabry F. Saraya Assistant professor at Computers
Design of Joint Controller for Welding Robot and Parameter Optimization
 97 A publication of CHEMICAL ENGINEERING TRANSACTIONS VOL. 59, 2017 Guest Editors: Zhuo Yang, Junjie Ba, Jing Pan Copyright 2017, AIDIC Servizi S.r.l. ISBN 978-88-95608-49-5; ISSN 2283-9216 The Italian
97 A publication of CHEMICAL ENGINEERING TRANSACTIONS VOL. 59, 2017 Guest Editors: Zhuo Yang, Junjie Ba, Jing Pan Copyright 2017, AIDIC Servizi S.r.l. ISBN 978-88-95608-49-5; ISSN 2283-9216 The Italian
International Journal of Mechanical & Mechatronics Engineering IJMME-IJENS Vol:16 No: L. J. Wei, A. Z. Hj Shukor, M. H.
 International Journal of Mechanical & Mechatronics Engineering IJMME-IJENS Vol:16 No:01 54 Investigation on the Effects of Outer-Loop Gains, Inner-Loop Gains and Variation of Parameters on Bilateral Teleoperation
International Journal of Mechanical & Mechatronics Engineering IJMME-IJENS Vol:16 No:01 54 Investigation on the Effects of Outer-Loop Gains, Inner-Loop Gains and Variation of Parameters on Bilateral Teleoperation
Optimized Tuning of PI Controller for a Spherical Tank Level System Using New Modified Repetitive Control Strategy
 International Journal of Engineering Research and Development e-issn: 2278-67X, p-issn: 2278-8X, www.ijerd.com Volume 3, Issue 6 (September 212), PP. 74-82 Optimized Tuning of PI Controller for a Spherical
International Journal of Engineering Research and Development e-issn: 2278-67X, p-issn: 2278-8X, www.ijerd.com Volume 3, Issue 6 (September 212), PP. 74-82 Optimized Tuning of PI Controller for a Spherical
A Study on Gaze Estimation System using Cross-Channels Electrooculogram Signals
 , March 12-14, 2014, Hong Kong A Study on Gaze Estimation System using Cross-Channels Electrooculogram Signals Mingmin Yan, Hiroki Tamura, and Koichi Tanno Abstract The aim of this study is to present
, March 12-14, 2014, Hong Kong A Study on Gaze Estimation System using Cross-Channels Electrooculogram Signals Mingmin Yan, Hiroki Tamura, and Koichi Tanno Abstract The aim of this study is to present
Dynamics and simulation analysis of table tennis robot based on independent joint control
 Acta Technica 62 No. 1B/2017, 35 44 c 2017 Institute of Thermomechanics CAS, v.v.i. Dynamics and simulation analysis of table tennis robot based on independent joint control Yang Yu 1 Abstract. The purpose
Acta Technica 62 No. 1B/2017, 35 44 c 2017 Institute of Thermomechanics CAS, v.v.i. Dynamics and simulation analysis of table tennis robot based on independent joint control Yang Yu 1 Abstract. The purpose
Robot Joint Angle Control Based on Self Resonance Cancellation Using Double Encoders
 Robot Joint Angle Control Based on Self Resonance Cancellation Using Double Encoders Akiyuki Hasegawa, Hiroshi Fujimoto and Taro Takahashi 2 Abstract Research on the control using a load-side encoder for
Robot Joint Angle Control Based on Self Resonance Cancellation Using Double Encoders Akiyuki Hasegawa, Hiroshi Fujimoto and Taro Takahashi 2 Abstract Research on the control using a load-side encoder for
2. Introduction to Computer Haptics
 2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
Fuzzy-Heuristic Robot Navigation in a Simulated Environment
 Fuzzy-Heuristic Robot Navigation in a Simulated Environment S. K. Deshpande, M. Blumenstein and B. Verma School of Information Technology, Griffith University-Gold Coast, PMB 50, GCMC, Bundall, QLD 9726,
Fuzzy-Heuristic Robot Navigation in a Simulated Environment S. K. Deshpande, M. Blumenstein and B. Verma School of Information Technology, Griffith University-Gold Coast, PMB 50, GCMC, Bundall, QLD 9726,
Combot: Compliant Climbing Robotic Platform with Transitioning Capability and Payload Capacity
 2012 IEEE International Conference on Robotics and Automation RiverCentre, Saint Paul, Minnesota, USA May 14-18, 2012 Combot: Compliant Climbing Robotic Platform with Transitioning Capability and Payload
2012 IEEE International Conference on Robotics and Automation RiverCentre, Saint Paul, Minnesota, USA May 14-18, 2012 Combot: Compliant Climbing Robotic Platform with Transitioning Capability and Payload
CHASSIS DYNAMOMETER TORQUE CONTROL SYSTEM DESIGN BY DIRECT INVERSE COMPENSATION. C.Matthews, P.Dickinson, A.T.Shenton
 CHASSIS DYNAMOMETER TORQUE CONTROL SYSTEM DESIGN BY DIRECT INVERSE COMPENSATION C.Matthews, P.Dickinson, A.T.Shenton Department of Engineering, The University of Liverpool, Liverpool L69 3GH, UK Abstract:
CHASSIS DYNAMOMETER TORQUE CONTROL SYSTEM DESIGN BY DIRECT INVERSE COMPENSATION C.Matthews, P.Dickinson, A.T.Shenton Department of Engineering, The University of Liverpool, Liverpool L69 3GH, UK Abstract:
Validation of Computer Simulations of the HyQ Robot
 April 28, 217 16:4 WSPC - Proceedings Trim Size: 9in x 6in main 1 Validation of Computer Simulations of the HyQ Robot Marco Frigerio, Victor Barasuol, Michele Focchi, Darwin G. Caldwell and Claudio Semini
April 28, 217 16:4 WSPC - Proceedings Trim Size: 9in x 6in main 1 Validation of Computer Simulations of the HyQ Robot Marco Frigerio, Victor Barasuol, Michele Focchi, Darwin G. Caldwell and Claudio Semini
University of Michigan 1630 Cram Circle Apt. #13Ann Arbor, MI, 48105, ,
 EDUCATION Doctor of Philosophy in Mechanical Engineering Apr. 2016, Ann Arbor, MI Specialization: Proposal and Analysis of Human, Machine Control toward Rehabilitation Advisor: Richard B. Gillespie, Ph.D.
EDUCATION Doctor of Philosophy in Mechanical Engineering Apr. 2016, Ann Arbor, MI Specialization: Proposal and Analysis of Human, Machine Control toward Rehabilitation Advisor: Richard B. Gillespie, Ph.D.
Innovative Design and Making of Bionic Robot Rabbit
 Innovative Design and Making of Bionic Robot Rabbit Hsin-Sheng Lee Kuo-Huang Lin and Yi-Yueh Hsu Abstract In order to improve the leaping function of robots, the documented information of bionic robots
Innovative Design and Making of Bionic Robot Rabbit Hsin-Sheng Lee Kuo-Huang Lin and Yi-Yueh Hsu Abstract In order to improve the leaping function of robots, the documented information of bionic robots
AHAPTIC interface is a kinesthetic link between a human
 IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 13, NO. 5, SEPTEMBER 2005 737 Time Domain Passivity Control With Reference Energy Following Jee-Hwan Ryu, Carsten Preusche, Blake Hannaford, and Gerd
IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 13, NO. 5, SEPTEMBER 2005 737 Time Domain Passivity Control With Reference Energy Following Jee-Hwan Ryu, Carsten Preusche, Blake Hannaford, and Gerd
Taylor Barto* Department of Electrical and Computer Engineering Cleveland State University Cleveland, Ohio December 2, 2014
 PID vs. Artificial Neural Network Control of an H-Bridge Voltage Source Converter Abstract Taylor Barto* Department of Electrical and Computer Engineering Cleveland State University Cleveland, Ohio 44115
PID vs. Artificial Neural Network Control of an H-Bridge Voltage Source Converter Abstract Taylor Barto* Department of Electrical and Computer Engineering Cleveland State University Cleveland, Ohio 44115
Comparative Analysis of Air Conditioning System Using PID and Neural Network Controller
 International Journal of Scientific and Research Publications, Volume 3, Issue 8, August 2013 1 Comparative Analysis of Air Conditioning System Using PID and Neural Network Controller Puneet Kumar *, Asso.Prof.
International Journal of Scientific and Research Publications, Volume 3, Issue 8, August 2013 1 Comparative Analysis of Air Conditioning System Using PID and Neural Network Controller Puneet Kumar *, Asso.Prof.
1045. Vibration of flexible rotor systems with twodegree-of-freedom
 1045. Vibration of flexible rotor systems with twodegree-of-freedom PID controller of active magnetic bearings Z. X. Zhong, C. S. Zhu Z. X. Zhong 1, C. S. Zhu 2 College of Electrical Engineering, Zhejiang
1045. Vibration of flexible rotor systems with twodegree-of-freedom PID controller of active magnetic bearings Z. X. Zhong, C. S. Zhu Z. X. Zhong 1, C. S. Zhu 2 College of Electrical Engineering, Zhejiang
Rapid and precise control of a micro-manipulation stage combining H with ILC algorithm
 Rapid and precise control of a micro-manipulation stage combining H with ILC algorithm *Jie Ling 1 and Xiaohui Xiao 1, School of Power and Mechanical Engineering, WHU, Wuhan, China xhxiao@whu.edu.cn ABSTRACT
Rapid and precise control of a micro-manipulation stage combining H with ILC algorithm *Jie Ling 1 and Xiaohui Xiao 1, School of Power and Mechanical Engineering, WHU, Wuhan, China xhxiao@whu.edu.cn ABSTRACT
ANASTASIOS I. MOURIKIS CURRICULUM VITAE
 ANASTASIOS I. MOURIKIS CURRICULUM VITAE TEL.: (951) 827 6051 FAX: (951) 827 2425 E-MAIL: mourikis@ee.ucr.edu WEB: www.ee.ucr.edu/ mourikis MAILING ADDRESS: Dept. of Electrical & Computer Engineering 343
ANASTASIOS I. MOURIKIS CURRICULUM VITAE TEL.: (951) 827 6051 FAX: (951) 827 2425 E-MAIL: mourikis@ee.ucr.edu WEB: www.ee.ucr.edu/ mourikis MAILING ADDRESS: Dept. of Electrical & Computer Engineering 343
Hybrid Input Shaping and Non-collocated PID Control of a Gantry Crane System: Comparative Assessment
 Hybrid Input Shaping and Non-collocated PID Control of a Gantry Crane System: Comparative Assessment M.A. Ahmad, R.M.T. Raja Ismail and M.S. Ramli Faculty of Electrical and Electronics Engineering Universiti
Hybrid Input Shaping and Non-collocated PID Control of a Gantry Crane System: Comparative Assessment M.A. Ahmad, R.M.T. Raja Ismail and M.S. Ramli Faculty of Electrical and Electronics Engineering Universiti
CONTINUOUS MOTION NOMINAL CHARACTERISTIC TRAJECTORY FOLLOWING CONTROL FOR POSITION CONTROL OF AN AC DRIVEN X-Y BALL SCREW MECHANISM
 Journal of Engineering Science and Technology Vol. 13, No. 7 (2018) 1939-1958 School of Engineering, Taylor s University CONTINUOUS MOTION NOMINAL CHARACTERISTIC TRAJECTORY FOLLOWING CONTROL FOR POSITION
Journal of Engineering Science and Technology Vol. 13, No. 7 (2018) 1939-1958 School of Engineering, Taylor s University CONTINUOUS MOTION NOMINAL CHARACTERISTIC TRAJECTORY FOLLOWING CONTROL FOR POSITION
Integration Intelligent Estimators to Disturbance Observer to Enhance Robustness of Active Magnetic Bearing Controller
 International Journal of Control Science and Engineering 217, 7(2): 25-31 DOI: 1.5923/j.control.21772.1 Integration Intelligent Estimators to Disturbance Observer to Enhance Robustness of Active Magnetic
International Journal of Control Science and Engineering 217, 7(2): 25-31 DOI: 1.5923/j.control.21772.1 Integration Intelligent Estimators to Disturbance Observer to Enhance Robustness of Active Magnetic
ACTIVE VIBRATION CONTROL OF HARD-DISK DRIVES USING PZT ACTUATED SUSPENSION SYSTEMS. Meng-Shiun Tsai, Wei-Hsiung Yuan and Jia-Ming Chang
 ICSV14 Cairns Australia 9-12 July, 27 ACTIVE VIBRATION CONTROL OF HARD-DISK DRIVES USING PZT ACTUATED SUSPENSION SYSTEMS Abstract Meng-Shiun Tsai, Wei-Hsiung Yuan and Jia-Ming Chang Department of Mechanical
ICSV14 Cairns Australia 9-12 July, 27 ACTIVE VIBRATION CONTROL OF HARD-DISK DRIVES USING PZT ACTUATED SUSPENSION SYSTEMS Abstract Meng-Shiun Tsai, Wei-Hsiung Yuan and Jia-Ming Chang Department of Mechanical
MODELLING AND CONTROL OF OFFSHORE CRANE SYSTEMS
 UNIVERSITY OF TECHNOLOGY, SYDNEY Faculty of Engineering and Information Technology MODELLING AND CONTROL OF OFFSHORE CRANE SYSTEMS by R.M.T. Raja Ismail A Thesis Submitted in Partial Fulfillment of the
UNIVERSITY OF TECHNOLOGY, SYDNEY Faculty of Engineering and Information Technology MODELLING AND CONTROL OF OFFSHORE CRANE SYSTEMS by R.M.T. Raja Ismail A Thesis Submitted in Partial Fulfillment of the
Digital Control of MS-150 Modular Position Servo System
 IEEE NECEC Nov. 8, 2007 St. John's NL 1 Digital Control of MS-150 Modular Position Servo System Farid Arvani, Syeda N. Ferdaus, M. Tariq Iqbal Faculty of Engineering, Memorial University of Newfoundland
IEEE NECEC Nov. 8, 2007 St. John's NL 1 Digital Control of MS-150 Modular Position Servo System Farid Arvani, Syeda N. Ferdaus, M. Tariq Iqbal Faculty of Engineering, Memorial University of Newfoundland
Robust Haptic Teleoperation of a Mobile Manipulation Platform
 Robust Haptic Teleoperation of a Mobile Manipulation Platform Jaeheung Park and Oussama Khatib Stanford AI Laboratory Stanford University http://robotics.stanford.edu Abstract. This paper presents a new
Robust Haptic Teleoperation of a Mobile Manipulation Platform Jaeheung Park and Oussama Khatib Stanford AI Laboratory Stanford University http://robotics.stanford.edu Abstract. This paper presents a new
Adaptive Inverse Control with IMC Structure Implementation on Robotic Arm Manipulator
 Adaptive Inverse Control with IMC Structure Implementation on Robotic Arm Manipulator Khalid M. Al-Zahrani echnical Support Unit erminal Department, Saudi Aramco P.O. Box 94 (Najmah), Ras anura, Saudi
Adaptive Inverse Control with IMC Structure Implementation on Robotic Arm Manipulator Khalid M. Al-Zahrani echnical Support Unit erminal Department, Saudi Aramco P.O. Box 94 (Najmah), Ras anura, Saudi
Strategies for Safety in Human Robot Interaction
 Strategies for Safety in Human Robot Interaction D. Kulić E. A. Croft Department of Mechanical Engineering University of British Columbia 2324 Main Mall Vancouver, BC, V6T 1Z4, Canada Abstract This paper
Strategies for Safety in Human Robot Interaction D. Kulić E. A. Croft Department of Mechanical Engineering University of British Columbia 2324 Main Mall Vancouver, BC, V6T 1Z4, Canada Abstract This paper
Article Info. 1. Introduction
 Novel Sliding Mode Controller for Robot Manipulator using FPGA Farzin Piltan, Atefeh Gavahian, Nasri Sulaiman and M.H. Marhaban Department of Electrical and Electronic Engineering, Faculty of Engineering,
Novel Sliding Mode Controller for Robot Manipulator using FPGA Farzin Piltan, Atefeh Gavahian, Nasri Sulaiman and M.H. Marhaban Department of Electrical and Electronic Engineering, Faculty of Engineering,
Summary of robot visual servo system
 Abstract Summary of robot visual servo system Xu Liu, Lingwen Tang School of Mechanical engineering, Southwest Petroleum University, Chengdu 610000, China In this paper, the survey of robot visual servoing
Abstract Summary of robot visual servo system Xu Liu, Lingwen Tang School of Mechanical engineering, Southwest Petroleum University, Chengdu 610000, China In this paper, the survey of robot visual servoing
Converting Motion between Different Types of Humanoid Robots Using Genetic Algorithms
 Converting Motion between Different Types of Humanoid Robots Using Genetic Algorithms Mari Nishiyama and Hitoshi Iba Abstract The imitation between different types of robots remains an unsolved task for
Converting Motion between Different Types of Humanoid Robots Using Genetic Algorithms Mari Nishiyama and Hitoshi Iba Abstract The imitation between different types of robots remains an unsolved task for
Andrea Calanca PERSONAL INFORMATIONS RESEARCH INTERESTS EDUCATION
 Andrea Calanca PERSONAL INFORMATIONS Name ANDREA CALANCA Birth March 12 th, 1981 Address Via Roma n. 7, 46010 Curtatone (MN) Italy E-mail Linkedin andrea.calanca@univr.it http://www.linkedin.com/profile/view?id=53047066
Andrea Calanca PERSONAL INFORMATIONS Name ANDREA CALANCA Birth March 12 th, 1981 Address Via Roma n. 7, 46010 Curtatone (MN) Italy E-mail Linkedin andrea.calanca@univr.it http://www.linkedin.com/profile/view?id=53047066
The Open Automation and Control Systems Journal, 2015, 7, Application of Fuzzy PID Control in the Level Process Control
 Send Orders for Reprints to reprints@benthamscience.ae The Open Automation and Control Systems Journal, 205, 7, 38-386 38 Application of Fuzzy PID Control in the Level Process Control Open Access Wang
Send Orders for Reprints to reprints@benthamscience.ae The Open Automation and Control Systems Journal, 205, 7, 38-386 38 Application of Fuzzy PID Control in the Level Process Control Open Access Wang
Optimal Control System Design
 Chapter 6 Optimal Control System Design 6.1 INTRODUCTION The active AFO consists of sensor unit, control system and an actuator. While designing the control system for an AFO, a trade-off between the transient
Chapter 6 Optimal Control System Design 6.1 INTRODUCTION The active AFO consists of sensor unit, control system and an actuator. While designing the control system for an AFO, a trade-off between the transient
Tracking Position Control of AC Servo Motor Using Enhanced Iterative Learning Control Strategy
 International Journal of Engineering Research and Development e-issn: 2278-67X, p-issn: 2278-8X, www.ijerd.com Volume 3, Issue 6 (September 212), PP. 26-33 Tracking Position Control of AC Servo Motor Using
International Journal of Engineering Research and Development e-issn: 2278-67X, p-issn: 2278-8X, www.ijerd.com Volume 3, Issue 6 (September 212), PP. 26-33 Tracking Position Control of AC Servo Motor Using
Nonlinear Adaptive Bilateral Control of Teleoperation Systems with Uncertain Dynamics and Kinematics
 Nonlinear Adaptive Bilateral Control of Teleoperation Systems with Uncertain Dynamics and Kinematics X. Liu, M. Tavakoli, and Q. Huang Abstract Research so far on adaptive bilateral control of master-slave
Nonlinear Adaptive Bilateral Control of Teleoperation Systems with Uncertain Dynamics and Kinematics X. Liu, M. Tavakoli, and Q. Huang Abstract Research so far on adaptive bilateral control of master-slave
Advanced Digital Motion Control Using SERCOS-based Torque Drives
 Advanced Digital Motion Using SERCOS-based Torque Drives Ying-Yu Tzou, Andes Yang, Cheng-Chang Hsieh, and Po-Ching Chen Power Electronics & Motion Lab. Dept. of Electrical and Engineering National Chiao
Advanced Digital Motion Using SERCOS-based Torque Drives Ying-Yu Tzou, Andes Yang, Cheng-Chang Hsieh, and Po-Ching Chen Power Electronics & Motion Lab. Dept. of Electrical and Engineering National Chiao
Adaptive Action Selection without Explicit Communication for Multi-robot Box-pushing
 Adaptive Action Selection without Explicit Communication for Multi-robot Box-pushing Seiji Yamada Jun ya Saito CISS, IGSSE, Tokyo Institute of Technology 4259 Nagatsuta, Midori, Yokohama 226-8502, JAPAN
Adaptive Action Selection without Explicit Communication for Multi-robot Box-pushing Seiji Yamada Jun ya Saito CISS, IGSSE, Tokyo Institute of Technology 4259 Nagatsuta, Midori, Yokohama 226-8502, JAPAN
International Journal of Technical Research and Applications e-issn: , Volume 4, Issue 3 (May-June, 2016), PP.
, PP.") DESIGNING OF ADVANCED PROCESS CONTROL USING FUZZY PID FOR SPEED CONTROL OF THE DC MOTOR & PERFORMANCE COMPARISON WITH THE CONVENTIONAL CONTROL ALGORITHMS Mahavir Teraiya, Prof. Nirav Tolia, Mr. Bhagathsinh
DESIGNING OF ADVANCED PROCESS CONTROL USING FUZZY PID FOR SPEED CONTROL OF THE DC MOTOR & PERFORMANCE COMPARISON WITH THE CONVENTIONAL CONTROL ALGORITHMS Mahavir Teraiya, Prof. Nirav Tolia, Mr. Bhagathsinh
A Model Based Digital PI Current Loop Control Design for AMB Actuator Coils Lei Zhu 1, a and Larry Hawkins 2, b
 A Model Based Digital PI Current Loop Control Design for AMB Actuator Coils Lei Zhu 1, a and Larry Hawkins 2, b 1, 2 Calnetix, Inc 23695 Via Del Rio Yorba Linda, CA 92782, USA a lzhu@calnetix.com, b lhawkins@calnetix.com
A Model Based Digital PI Current Loop Control Design for AMB Actuator Coils Lei Zhu 1, a and Larry Hawkins 2, b 1, 2 Calnetix, Inc 23695 Via Del Rio Yorba Linda, CA 92782, USA a lzhu@calnetix.com, b lhawkins@calnetix.com
Robotic Capture and De-Orbit of a Tumbling and Heavy Target from Low Earth Orbit
 www.dlr.de Chart 1 Robotic Capture and De-Orbit of a Tumbling and Heavy Target from Low Earth Orbit Steffen Jaekel, R. Lampariello, G. Panin, M. Sagardia, B. Brunner, O. Porges, and E. Kraemer (1) M. Wieser,
www.dlr.de Chart 1 Robotic Capture and De-Orbit of a Tumbling and Heavy Target from Low Earth Orbit Steffen Jaekel, R. Lampariello, G. Panin, M. Sagardia, B. Brunner, O. Porges, and E. Kraemer (1) M. Wieser,
Hybrid LQG-Neural Controller for Inverted Pendulum System
 Hybrid LQG-Neural Controller for Inverted Pendulum System E.S. Sazonov Department of Electrical and Computer Engineering Clarkson University Potsdam, NY 13699-570 USA P. Klinkhachorn and R. L. Klein Lane
Hybrid LQG-Neural Controller for Inverted Pendulum System E.S. Sazonov Department of Electrical and Computer Engineering Clarkson University Potsdam, NY 13699-570 USA P. Klinkhachorn and R. L. Klein Lane
11 1. H Tomori, Y Midorikawa and T Nakamura, Vibration control of an artificial muscle manipulator with a magnetorheological fluid brake, Journal of
 11 1. H Tomori, Y Midorikawa and T Nakamura, Vibration control of an artificial muscle manipulator with a magnetorheological fluid brake, Journal of Physics: Conference Series, Volume 412 (2013), 012053
11 1. H Tomori, Y Midorikawa and T Nakamura, Vibration control of an artificial muscle manipulator with a magnetorheological fluid brake, Journal of Physics: Conference Series, Volume 412 (2013), 012053
Intelligent Learning Control Strategies for Position Tracking of AC Servomotor
 Intelligent Learning Control Strategies for Position Tracking of AC Servomotor M.Vijayakarthick 1 1Assistant Professor& Department of Electronics and Instrumentation Engineering, Annamalai University,
Intelligent Learning Control Strategies for Position Tracking of AC Servomotor M.Vijayakarthick 1 1Assistant Professor& Department of Electronics and Instrumentation Engineering, Annamalai University,
A Feasibility Study of Time-Domain Passivity Approach for Bilateral Teleoperation of Mobile Manipulator
 International Conference on Control, Automation and Systems 2008 Oct. 14-17, 2008 in COEX, Seoul, Korea A Feasibility Study of Time-Domain Passivity Approach for Bilateral Teleoperation of Mobile Manipulator
International Conference on Control, Automation and Systems 2008 Oct. 14-17, 2008 in COEX, Seoul, Korea A Feasibility Study of Time-Domain Passivity Approach for Bilateral Teleoperation of Mobile Manipulator
WING rock is a highly nonlinear aerodynamic phenomenon,
 IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 6, NO. 5, SEPTEMBER 1998 671 Suppression of Wing Rock of Slender Delta Wings Using a Single Neuron Controller Santosh V. Joshi, A. G. Sreenatha, and
IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 6, NO. 5, SEPTEMBER 1998 671 Suppression of Wing Rock of Slender Delta Wings Using a Single Neuron Controller Santosh V. Joshi, A. G. Sreenatha, and
Active Stabilization of a Humanoid Robot for Impact Motions with Unknown Reaction Forces
 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems October 7-12, 2012. Vilamoura, Algarve, Portugal Active Stabilization of a Humanoid Robot for Impact Motions with Unknown Reaction
2012 IEEE/RSJ International Conference on Intelligent Robots and Systems October 7-12, 2012. Vilamoura, Algarve, Portugal Active Stabilization of a Humanoid Robot for Impact Motions with Unknown Reaction
Evolving High-Dimensional, Adaptive Camera-Based Speed Sensors
 In: M.H. Hamza (ed.), Proceedings of the 21st IASTED Conference on Applied Informatics, pp. 1278-128. Held February, 1-1, 2, Insbruck, Austria Evolving High-Dimensional, Adaptive Camera-Based Speed Sensors
In: M.H. Hamza (ed.), Proceedings of the 21st IASTED Conference on Applied Informatics, pp. 1278-128. Held February, 1-1, 2, Insbruck, Austria Evolving High-Dimensional, Adaptive Camera-Based Speed Sensors