Depth from Diffusion
|
|
|
- Bryan Kelley
- 6 years ago
- Views:
Transcription
1 Depth from Diffusion Changyin Zhou Oliver Cossairt Shree Nayar Columbia University Supported by ONR
2 Optical Diffuser
3 Optical Diffuser ~ 10 micron Micrograph of a Holographic Diffuser (RPC Photonics) [Gray, 1978] [Chang et al., 2006] [Garcia-Guerrero et al. 2007]








4 Diffusers as Accessories (B&H) Diffusers for illumination Diffuser to preview the image (B&H) Diffusers to soften the image







5 Diffusion Encodes Depth Diffuser Diffuser Camera Camera The amount of diffusion i varies with depth.
6 Geometry of Diffusion: A Pinhole Camera Miss P Q Pinhole Sensor
7 Geometry of Diffusion: A Pinhole Camera θ P Pinhole Sensor Diffuser
8 Geometry of Diffusion: A Pinhole Camera θ θ A B P Pinhole Sensor Diffuser
9 Geometry of Diffusion: A Pinhole Camera Diffusion Law: Pinhole θ θ A B P 2r Sensor O V U Z Diffuser
10 Geometry of Diffusion: A Pinhole Camera Diffusion Size and Depth: Pinhole θ θ A B P 2r Sensor O V U Z Diffuser
11 Geometry of Diffusion: A Pinhole Camera Diffusion Size and Depth: Diffuser as a proxy object Z P Pinhole 2r O Sensor V U Diffuser
12 Diffusion as Convolution: A Pinhole Camera Assume field angle and depth are constant for small image patches, we have: Captured Image Latent clear image Diffusion PSF Diffusion Size
13 Geometry of Diffusion: A Lens Camera
14 Geometry of Diffusion: A Lens Camera Diffuser as a proxy object Z P Pinhole 2r O Sensor V U Diffuser
15 Geometry of Diffusion: A Lens Camera The captured image can be further blurred due to defocus. Lens Diffuser as a proxy object Z P 2r Sensor V U Diffuser
16 Diffusion as Convolution: A Lens Camera For a lens camera with a diffuser, we have: The Final PSF Diffusion PSF Defocus PSF is the diffusion PSF if a pinhole were used. is the defocus PSF if the diffuser were removed.
17 Depth from Diffusion (DFDiff) Algorithm 1. Capture Two Images With a diffuser Without a diffuser 2. Estimate Blur Size r Same form as in DFD 3. Compute Depth Z
18 Depth from Diffusion vs. Depth from Defocus Depth from Defocus P Aperture pattern r Sensor Lens Z Focal Plane Depth from Diffusion θ P Diffusion pattern r Sensor Pinhole θ Diffuser Z [Pentland, 1987] [Subbarao, 1988] [Watanabe & Nayar, 1996] [Chaudhuri & Rajagopalan, 1999] [Favaro & Soatto, 2005] [Schechner & Kiryati, 2000]
19 Depth from Diffusion vs. Depth from Defocus Depth from Diffusion Suppose 22.5x15mm Sensor, 10 um pixel, 100 mm EFL Any lens is fine! A Diffuser of 21.8 o P Field of View distance = 1000 mm Depth precision is about 0.1 mm.
20 Depth from Diffusion vs. Depth from Defocus Depth from Defocus Suppose 22.5x15mm Sensor, 10 um pixel, 100 mm EFL Lens Aperture diameter? P Field of View distance = 1000 mm Depth precision is about 0.1 mm.
21 Depth from Diffusion vs. Depth from Defocus Depth from Defocus Suppose 22.5x15mm Sensor, 10 um pixel, 100 mm EFL Aperture diameter 800 mm P distance = 1000 mm Depth precision is about 0.1 mm.
22 Depth from Diffusion vs. Depth from Defocus Depth from Diffusion Suppose 22.5x15mm Sensor, 10 um pixel, 100 mm EFL Any lens is fine! A Diffuser of 11.2 o P distance = 5000 mm Depth precision is about 1.0 mm.
23 Depth from Diffusion vs. Depth from Defocus Depth from Defocus Suppose 22.5x15mm Sensor, 10 um pixel, 100 mm EFL Lens Aperture diameter? P distance = 5000 mm Depth precision is about 1.0 mm.
24 Depth from Diffusion vs. Depth from Defocus Depth from Defocus Suppose 22.5x15mm Sensor, 10 um pixel, 100 mm EFL Aperture diameter 2000 mm P distance = 5000 mm Depth precision is about 1.0 mm.
25 PSF Measurement: A Pinhole Camera F/22, Field Angle =0 o Captured Modeled Z = 2 mm Z = 5 mm - Canon EOS T1i; EF 50mm F/1.8 Lens; - Luminit Holographic Diffuser (10 o Gaussian); - Diffuser distance: U = 1m
26 PSF Measurement: A Pinhole Camera F/22, Field Angle =10 o Captured Modeled Z = 2 mm Z = 5 mm - Canon EOS T1i; EF 50mm F/1.8 Lens; - Luminit Holographic Diffuser (10 o Gaussian); - Diffuser distance: U = 1m
27 PSF Measurement: A Lens Camera F/1.8, Field Angle =10 o Captured Modeled - Canon EOS T1i; EF 50mm F/1.8 Lens; - Luminit Holographic Diffuser (10 o Gaussian); - Diffuser distance: U = 1m






28 Experiments Canon 20D + 50mm Lens Five playing cards, 0.29mm thick each Luminit it Diffuser (20 o )




29 Experiments Captured WITHOUT a Diffuser Captured WITH a Diffuser








30 Experiments Five playing cards, 0.29mm thick each Computed Depth Map (~ 0.1 mm precision) (mm)






31 Experiments A small sculpture of about 4mm thickness Canon G5 Compact Camera Luminit Diffuser (5 o )








32 Experiments Captured WITHOUT a Diffuser Captured WITH a Diffuser







33 Experiments A small sculpture of about 4mm thickness Computed Depth Map A 3D View of Depth Map
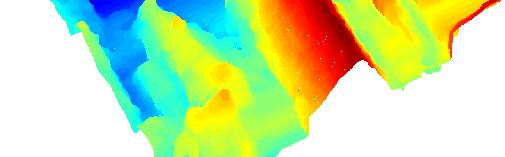
34 Experiments 450 mm m 650 mm Canon 20D; Gaussian Diffuser (10 o )

")
35 Experiments Stitched Depth Map (precision) (mm)





36 Summary Formulated the image formation with optical diffusers Proposed Depth from Diffusion - Require a diffuser on the object side + High-precision depth estimation + Distant objects + Less sensitive to lens aberrations Diffuser Camera Demonstrated high-precision depth estimation
37 Depth from Diffusion Changyin Zhou Oliver Cossairt Shree Nayar Columbia University Supported by ONR
When Does Computational Imaging Improve Performance?
 When Does Computational Imaging Improve Performance? Oliver Cossairt Assistant Professor Northwestern University Collaborators: Mohit Gupta, Changyin Zhou, Daniel Miau, Shree Nayar (Columbia University)
When Does Computational Imaging Improve Performance? Oliver Cossairt Assistant Professor Northwestern University Collaborators: Mohit Gupta, Changyin Zhou, Daniel Miau, Shree Nayar (Columbia University)
Coded Aperture Pairs for Depth from Defocus
 Coded Aperture Pairs for Depth from Defocus Changyin Zhou Columbia University New York City, U.S. changyin@cs.columbia.edu Stephen Lin Microsoft Research Asia Beijing, P.R. China stevelin@microsoft.com
Coded Aperture Pairs for Depth from Defocus Changyin Zhou Columbia University New York City, U.S. changyin@cs.columbia.edu Stephen Lin Microsoft Research Asia Beijing, P.R. China stevelin@microsoft.com
Point Spread Function Engineering for Scene Recovery. Changyin Zhou
 Point Spread Function Engineering for Scene Recovery Changyin Zhou Submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy in the Graduate School of Arts and Sciences
Point Spread Function Engineering for Scene Recovery Changyin Zhou Submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy in the Graduate School of Arts and Sciences
Optimal Camera Parameters for Depth from Defocus
 Optimal Camera Parameters for Depth from Defocus Fahim Mannan and Michael S. Langer School of Computer Science, McGill University Montreal, Quebec H3A E9, Canada. {fmannan, langer}@cim.mcgill.ca Abstract
Optimal Camera Parameters for Depth from Defocus Fahim Mannan and Michael S. Langer School of Computer Science, McGill University Montreal, Quebec H3A E9, Canada. {fmannan, langer}@cim.mcgill.ca Abstract
To Denoise or Deblur: Parameter Optimization for Imaging Systems
 To Denoise or Deblur: Parameter Optimization for Imaging Systems Kaushik Mitra, Oliver Cossairt and Ashok Veeraraghavan 1 ECE, Rice University 2 EECS, Northwestern University 3/3/2014 1 Capture moving
To Denoise or Deblur: Parameter Optimization for Imaging Systems Kaushik Mitra, Oliver Cossairt and Ashok Veeraraghavan 1 ECE, Rice University 2 EECS, Northwestern University 3/3/2014 1 Capture moving
A Framework for Analysis of Computational Imaging Systems
 A Framework for Analysis of Computational Imaging Systems Kaushik Mitra, Oliver Cossairt, Ashok Veeraghavan Rice University Northwestern University Computational imaging CI systems that adds new functionality
A Framework for Analysis of Computational Imaging Systems Kaushik Mitra, Oliver Cossairt, Ashok Veeraghavan Rice University Northwestern University Computational imaging CI systems that adds new functionality
Lecture 22: Cameras & Lenses III. Computer Graphics and Imaging UC Berkeley CS184/284A, Spring 2017
 Lecture 22: Cameras & Lenses III Computer Graphics and Imaging UC Berkeley, Spring 2017 F-Number For Lens vs. Photo A lens s F-Number is the maximum for that lens E.g. 50 mm F/1.4 is a high-quality telephoto
Lecture 22: Cameras & Lenses III Computer Graphics and Imaging UC Berkeley, Spring 2017 F-Number For Lens vs. Photo A lens s F-Number is the maximum for that lens E.g. 50 mm F/1.4 is a high-quality telephoto
VC 14/15 TP2 Image Formation
 VC 14/15 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
VC 14/15 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
Image and Depth from a Single Defocused Image Using Coded Aperture Photography
 Image and Depth from a Single Defocused Image Using Coded Aperture Photography Mina Masoudifar a, Hamid Reza Pourreza a a Department of Computer Engineering, Ferdowsi University of Mashhad, Mashhad, Iran
Image and Depth from a Single Defocused Image Using Coded Aperture Photography Mina Masoudifar a, Hamid Reza Pourreza a a Department of Computer Engineering, Ferdowsi University of Mashhad, Mashhad, Iran
Changyin Zhou. Ph.D, Computer Science, Columbia University Oct 2012
 Changyin Zhou Software Engineer at Google X Google Inc. 1600 Amphitheater Parkway, Mountain View, CA 94043 E-mail: changyin@google.com URL: http://www.changyin.org Office: (917) 209-9110 Mobile: (646)
Changyin Zhou Software Engineer at Google X Google Inc. 1600 Amphitheater Parkway, Mountain View, CA 94043 E-mail: changyin@google.com URL: http://www.changyin.org Office: (917) 209-9110 Mobile: (646)
VC 16/17 TP2 Image Formation
 VC 16/17 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Hélder Filipe Pinto de Oliveira Outline Computer Vision? The Human Visual
VC 16/17 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Hélder Filipe Pinto de Oliveira Outline Computer Vision? The Human Visual
VC 11/12 T2 Image Formation
 VC 11/12 T2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
VC 11/12 T2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
Computational approach for depth from defocus
 Journal of Electronic Imaging 14(2), 023021 (Apr Jun 2005) Computational approach for depth from defocus Ovidiu Ghita* Paul F. Whelan John Mallon Vision Systems Laboratory School of Electronic Engineering
Journal of Electronic Imaging 14(2), 023021 (Apr Jun 2005) Computational approach for depth from defocus Ovidiu Ghita* Paul F. Whelan John Mallon Vision Systems Laboratory School of Electronic Engineering
On the Recovery of Depth from a Single Defocused Image
 On the Recovery of Depth from a Single Defocused Image Shaojie Zhuo and Terence Sim School of Computing National University of Singapore Singapore,747 Abstract. In this paper we address the challenging
On the Recovery of Depth from a Single Defocused Image Shaojie Zhuo and Terence Sim School of Computing National University of Singapore Singapore,747 Abstract. In this paper we address the challenging
IMAGE FORMATION. Light source properties. Sensor characteristics Surface. Surface reflectance properties. Optics
 IMAGE FORMATION Light source properties Sensor characteristics Surface Exposure shape Optics Surface reflectance properties ANALOG IMAGES An image can be understood as a 2D light intensity function f(x,y)
IMAGE FORMATION Light source properties Sensor characteristics Surface Exposure shape Optics Surface reflectance properties ANALOG IMAGES An image can be understood as a 2D light intensity function f(x,y)
Defocus Map Estimation from a Single Image
 Defocus Map Estimation from a Single Image Shaojie Zhuo Terence Sim School of Computing, National University of Singapore, Computing 1, 13 Computing Drive, Singapore 117417, SINGAPOUR Abstract In this
Defocus Map Estimation from a Single Image Shaojie Zhuo Terence Sim School of Computing, National University of Singapore, Computing 1, 13 Computing Drive, Singapore 117417, SINGAPOUR Abstract In this
A moment-preserving approach for depth from defocus
 A moment-preserving approach for depth from defocus D. M. Tsai and C. T. Lin Machine Vision Lab. Department of Industrial Engineering and Management Yuan-Ze University, Chung-Li, Taiwan, R.O.C. E-mail:
A moment-preserving approach for depth from defocus D. M. Tsai and C. T. Lin Machine Vision Lab. Department of Industrial Engineering and Management Yuan-Ze University, Chung-Li, Taiwan, R.O.C. E-mail:
Evolving Measurement Regions for Depth from Defocus
 Evolving Measurement Regions for Depth from Defocus Scott McCloskey, Michael Langer, and Kaleem Siddiqi Centre for Intelligent Machines, McGill University {scott,langer,siddiqi}@cim.mcgill.ca Abstract.
Evolving Measurement Regions for Depth from Defocus Scott McCloskey, Michael Langer, and Kaleem Siddiqi Centre for Intelligent Machines, McGill University {scott,langer,siddiqi}@cim.mcgill.ca Abstract.
Coded Computational Photography!
 Coded Computational Photography! EE367/CS448I: Computational Imaging and Display! stanford.edu/class/ee367! Lecture 9! Gordon Wetzstein! Stanford University! Coded Computational Photography - Overview!!
Coded Computational Photography! EE367/CS448I: Computational Imaging and Display! stanford.edu/class/ee367! Lecture 9! Gordon Wetzstein! Stanford University! Coded Computational Photography - Overview!!
Coding and Modulation in Cameras
 Coding and Modulation in Cameras Amit Agrawal June 2010 Mitsubishi Electric Research Labs (MERL) Cambridge, MA, USA Coded Computational Imaging Agrawal, Veeraraghavan, Narasimhan & Mohan Schedule Introduction
Coding and Modulation in Cameras Amit Agrawal June 2010 Mitsubishi Electric Research Labs (MERL) Cambridge, MA, USA Coded Computational Imaging Agrawal, Veeraraghavan, Narasimhan & Mohan Schedule Introduction
Focal Sweep Videography with Deformable Optics
 Focal Sweep Videography with Deformable Optics Daniel Miau Columbia University dmiau@cs.columbia.edu Oliver Cossairt Northwestern University ollie@eecs.northwestern.edu Shree K. Nayar Columbia University
Focal Sweep Videography with Deformable Optics Daniel Miau Columbia University dmiau@cs.columbia.edu Oliver Cossairt Northwestern University ollie@eecs.northwestern.edu Shree K. Nayar Columbia University
6.A44 Computational Photography
 Add date: Friday 6.A44 Computational Photography Depth of Field Frédo Durand We allow for some tolerance What happens when we close the aperture by two stop? Aperture diameter is divided by two is doubled
Add date: Friday 6.A44 Computational Photography Depth of Field Frédo Durand We allow for some tolerance What happens when we close the aperture by two stop? Aperture diameter is divided by two is doubled
To Denoise or Deblur: Parameter Optimization for Imaging Systems
 To Denoise or Deblur: Parameter Optimization for Imaging Systems Kaushik Mitra a, Oliver Cossairt b and Ashok Veeraraghavan a a Electrical and Computer Engineering, Rice University, Houston, TX 77005 b
To Denoise or Deblur: Parameter Optimization for Imaging Systems Kaushik Mitra a, Oliver Cossairt b and Ashok Veeraraghavan a a Electrical and Computer Engineering, Rice University, Houston, TX 77005 b
Performance Evaluation of Different Depth From Defocus (DFD) Techniques
 Techniques") Please verify that () all pages are present, () all figures are acceptable, (3) all fonts and special characters are correct, and () all text and figures fit within the Performance Evaluation of Different
Please verify that () all pages are present, () all figures are acceptable, (3) all fonts and special characters are correct, and () all text and figures fit within the Performance Evaluation of Different
Pattern Recognition 44 (2011) Contents lists available at ScienceDirect. Pattern Recognition. journal homepage:
 Contents lists available at ScienceDirect. Pattern Recognition. journal homepage:") Pattern Recognition 44 () 85 858 Contents lists available at ScienceDirect Pattern Recognition journal homepage: www.elsevier.com/locate/pr Defocus map estimation from a single image Shaojie Zhuo, Terence
Pattern Recognition 44 () 85 858 Contents lists available at ScienceDirect Pattern Recognition journal homepage: www.elsevier.com/locate/pr Defocus map estimation from a single image Shaojie Zhuo, Terence
Declaration. Michal Šorel March 2007
 Charles University in Prague Faculty of Mathematics and Physics Multichannel Blind Restoration of Images with Space-Variant Degradations Ph.D. Thesis Michal Šorel March 2007 Department of Software Engineering
Charles University in Prague Faculty of Mathematics and Physics Multichannel Blind Restoration of Images with Space-Variant Degradations Ph.D. Thesis Michal Šorel March 2007 Department of Software Engineering
 Project 4 Results http://www.cs.brown.edu/courses/cs129/results/proj4/jcmace/ http://www.cs.brown.edu/courses/cs129/results/proj4/damoreno/ http://www.cs.brown.edu/courses/csci1290/results/proj4/huag/
Project 4 Results http://www.cs.brown.edu/courses/cs129/results/proj4/jcmace/ http://www.cs.brown.edu/courses/cs129/results/proj4/damoreno/ http://www.cs.brown.edu/courses/csci1290/results/proj4/huag/
Implementation of Adaptive Coded Aperture Imaging using a Digital Micro-Mirror Device for Defocus Deblurring
 Implementation of Adaptive Coded Aperture Imaging using a Digital Micro-Mirror Device for Defocus Deblurring Ashill Chiranjan and Bernardt Duvenhage Defence, Peace, Safety and Security Council for Scientific
Implementation of Adaptive Coded Aperture Imaging using a Digital Micro-Mirror Device for Defocus Deblurring Ashill Chiranjan and Bernardt Duvenhage Defence, Peace, Safety and Security Council for Scientific
Announcement A total of 5 (five) late days are allowed for projects. Office hours
 late days are allowed for projects. Office hours") Announcement A total of 5 (five) late days are allowed for projects. Office hours Me: 3:50-4:50pm Thursday (or by appointment) Jake: 12:30-1:30PM Monday and Wednesday Image Formation Digital Camera Film
Announcement A total of 5 (five) late days are allowed for projects. Office hours Me: 3:50-4:50pm Thursday (or by appointment) Jake: 12:30-1:30PM Monday and Wednesday Image Formation Digital Camera Film
Acquisition. Some slides from: Yung-Yu Chuang (DigiVfx) Jan Neumann, Pat Hanrahan, Alexei Efros
 Jan Neumann, Pat Hanrahan, Alexei Efros") Acquisition Some slides from: Yung-Yu Chuang (DigiVfx) Jan Neumann, Pat Hanrahan, Alexei Efros Image Acquisition Digital Camera Film Outline Pinhole camera Lens Lens aberrations Exposure Sensors Noise
Acquisition Some slides from: Yung-Yu Chuang (DigiVfx) Jan Neumann, Pat Hanrahan, Alexei Efros Image Acquisition Digital Camera Film Outline Pinhole camera Lens Lens aberrations Exposure Sensors Noise
Computational Camera & Photography: Coded Imaging
 Computational Camera & Photography: Coded Imaging Camera Culture Ramesh Raskar MIT Media Lab http://cameraculture.media.mit.edu/ Image removed due to copyright restrictions. See Fig. 1, Eight major types
Computational Camera & Photography: Coded Imaging Camera Culture Ramesh Raskar MIT Media Lab http://cameraculture.media.mit.edu/ Image removed due to copyright restrictions. See Fig. 1, Eight major types
Image Formation and Capture. Acknowledgment: some figures by B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, and A. Theuwissen
 Image Formation and Capture Acknowledgment: some figures by B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, and A. Theuwissen Image Formation and Capture Real world Optics Sensor Devices Sources of Error
Image Formation and Capture Acknowledgment: some figures by B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, and A. Theuwissen Image Formation and Capture Real world Optics Sensor Devices Sources of Error
Warning : Be Aware that Some HyperFocal Distance (HFD) Calculators on the Web will give you misleading Hyperfocal Distance and DOF values
 Calculators on the Web will give you misleading Hyperfocal Distance and DOF values") Fountain Hills Photography Club Information Series Bruce Boyce 9/2/14 Warning : Be Aware that Some HyperFocal Distance (HFD) Calculators on the Web will give you misleading Hyperfocal Distance and DOF
Fountain Hills Photography Club Information Series Bruce Boyce 9/2/14 Warning : Be Aware that Some HyperFocal Distance (HFD) Calculators on the Web will give you misleading Hyperfocal Distance and DOF
LENSES. INEL 6088 Computer Vision
 LENSES INEL 6088 Computer Vision Digital camera A digital camera replaces film with a sensor array Each cell in the array is a Charge Coupled Device light-sensitive diode that converts photons to electrons
LENSES INEL 6088 Computer Vision Digital camera A digital camera replaces film with a sensor array Each cell in the array is a Charge Coupled Device light-sensitive diode that converts photons to electrons
Dappled Photography: Mask Enhanced Cameras for Heterodyned Light Fields and Coded Aperture Refocusing
 Dappled Photography: Mask Enhanced Cameras for Heterodyned Light Fields and Coded Aperture Refocusing Ashok Veeraraghavan, Ramesh Raskar, Ankit Mohan & Jack Tumblin Amit Agrawal, Mitsubishi Electric Research
Dappled Photography: Mask Enhanced Cameras for Heterodyned Light Fields and Coded Aperture Refocusing Ashok Veeraraghavan, Ramesh Raskar, Ankit Mohan & Jack Tumblin Amit Agrawal, Mitsubishi Electric Research
Unit 1: Image Formation
 Unit 1: Image Formation 1. Geometry 2. Optics 3. Photometry 4. Sensor Readings Szeliski 2.1-2.3 & 6.3.5 1 Physical parameters of image formation Geometric Type of projection Camera pose Optical Sensor
Unit 1: Image Formation 1. Geometry 2. Optics 3. Photometry 4. Sensor Readings Szeliski 2.1-2.3 & 6.3.5 1 Physical parameters of image formation Geometric Type of projection Camera pose Optical Sensor
Reflectors vs. Refractors
 1 Telescope Types - Telescopes collect and concentrate light (which can then be magnified, dispersed as a spectrum, etc). - In the end it is the collecting area that counts. - There are two primary telescope
1 Telescope Types - Telescopes collect and concentrate light (which can then be magnified, dispersed as a spectrum, etc). - In the end it is the collecting area that counts. - There are two primary telescope
Computational Cameras. Rahul Raguram COMP
 Computational Cameras Rahul Raguram COMP 790-090 What is a computational camera? Camera optics Camera sensor 3D scene Traditional camera Final image Modified optics Camera sensor Image Compute 3D scene
Computational Cameras Rahul Raguram COMP 790-090 What is a computational camera? Camera optics Camera sensor 3D scene Traditional camera Final image Modified optics Camera sensor Image Compute 3D scene
Near-Invariant Blur for Depth and 2D Motion via Time-Varying Light Field Analysis
 Near-Invariant Blur for Depth and 2D Motion via Time-Varying Light Field Analysis Yosuke Bando 1,2 Henry Holtzman 2 Ramesh Raskar 2 1 Toshiba Corporation 2 MIT Media Lab Defocus & Motion Blur PSF Depth
Near-Invariant Blur for Depth and 2D Motion via Time-Varying Light Field Analysis Yosuke Bando 1,2 Henry Holtzman 2 Ramesh Raskar 2 1 Toshiba Corporation 2 MIT Media Lab Defocus & Motion Blur PSF Depth
Design of Temporally Dithered Codes for Increased Depth of Field in Structured Light Systems
 Design of Temporally Dithered Codes for Increased Depth of Field in Structured Light Systems Ricardo R. Garcia University of California, Berkeley Berkeley, CA rrgarcia@eecs.berkeley.edu Abstract In recent
Design of Temporally Dithered Codes for Increased Depth of Field in Structured Light Systems Ricardo R. Garcia University of California, Berkeley Berkeley, CA rrgarcia@eecs.berkeley.edu Abstract In recent
SURVEILLANCE SYSTEMS WITH AUTOMATIC RESTORATION OF LINEAR MOTION AND OUT-OF-FOCUS BLURRED IMAGES. Received August 2008; accepted October 2008
 ICIC Express Letters ICIC International c 2008 ISSN 1881-803X Volume 2, Number 4, December 2008 pp. 409 414 SURVEILLANCE SYSTEMS WITH AUTOMATIC RESTORATION OF LINEAR MOTION AND OUT-OF-FOCUS BLURRED IMAGES
ICIC Express Letters ICIC International c 2008 ISSN 1881-803X Volume 2, Number 4, December 2008 pp. 409 414 SURVEILLANCE SYSTEMS WITH AUTOMATIC RESTORATION OF LINEAR MOTION AND OUT-OF-FOCUS BLURRED IMAGES
Modeling and Synthesis of Aperture Effects in Cameras
 Modeling and Synthesis of Aperture Effects in Cameras Douglas Lanman, Ramesh Raskar, and Gabriel Taubin Computational Aesthetics 2008 20 June, 2008 1 Outline Introduction and Related Work Modeling Vignetting
Modeling and Synthesis of Aperture Effects in Cameras Douglas Lanman, Ramesh Raskar, and Gabriel Taubin Computational Aesthetics 2008 20 June, 2008 1 Outline Introduction and Related Work Modeling Vignetting
What will be on the midterm?
 What will be on the midterm? CS 178, Spring 2014 Marc Levoy Computer Science Department Stanford University General information 2 Monday, 7-9pm, Cubberly Auditorium (School of Edu) closed book, no notes
What will be on the midterm? CS 178, Spring 2014 Marc Levoy Computer Science Department Stanford University General information 2 Monday, 7-9pm, Cubberly Auditorium (School of Edu) closed book, no notes
Overview. Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image
 Camera & Color Overview Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image Book: Hartley 6.1, Szeliski 2.1.5, 2.2, 2.3 The trip
Camera & Color Overview Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image Book: Hartley 6.1, Szeliski 2.1.5, 2.2, 2.3 The trip
CODE V Introductory Tutorial
 CODE V Introductory Tutorial Cheng-Fang Ho Lab.of RF-MW Photonics, Department of Physics, National Cheng-Kung University, Tainan, Taiwan 1-1 Tutorial Outline Introduction to CODE V Optical Design Process
CODE V Introductory Tutorial Cheng-Fang Ho Lab.of RF-MW Photonics, Department of Physics, National Cheng-Kung University, Tainan, Taiwan 1-1 Tutorial Outline Introduction to CODE V Optical Design Process
Image Formation. Light from distant things. Geometrical optics. Pinhole camera. Chapter 36
 Light from distant things Chapter 36 We learn about a distant thing from the light it generates or redirects. The lenses in our eyes create images of objects our brains can process. This chapter concerns
Light from distant things Chapter 36 We learn about a distant thing from the light it generates or redirects. The lenses in our eyes create images of objects our brains can process. This chapter concerns
Point Spread Function. Confocal Laser Scanning Microscopy. Confocal Aperture. Optical aberrations. Alternative Scanning Microscopy
 Bi177 Lecture 5 Adding the Third Dimension Wide-field Imaging Point Spread Function Deconvolution Confocal Laser Scanning Microscopy Confocal Aperture Optical aberrations Alternative Scanning Microscopy
Bi177 Lecture 5 Adding the Third Dimension Wide-field Imaging Point Spread Function Deconvolution Confocal Laser Scanning Microscopy Confocal Aperture Optical aberrations Alternative Scanning Microscopy
Deblurring. Basics, Problem definition and variants
 Deblurring Basics, Problem definition and variants Kinds of blur Hand-shake Defocus Credit: Kenneth Josephson Motion Credit: Kenneth Josephson Kinds of blur Spatially invariant vs. Spatially varying
Deblurring Basics, Problem definition and variants Kinds of blur Hand-shake Defocus Credit: Kenneth Josephson Motion Credit: Kenneth Josephson Kinds of blur Spatially invariant vs. Spatially varying
To Do. Advanced Computer Graphics. Outline. Computational Imaging. How do we see the world? Pinhole camera
 Advanced Computer Graphics CSE 163 [Spring 2017], Lecture 14 Ravi Ramamoorthi http://www.cs.ucsd.edu/~ravir To Do Assignment 2 due May 19 Any last minute issues or questions? Next two lectures: Imaging,
Advanced Computer Graphics CSE 163 [Spring 2017], Lecture 14 Ravi Ramamoorthi http://www.cs.ucsd.edu/~ravir To Do Assignment 2 due May 19 Any last minute issues or questions? Next two lectures: Imaging,
Coded photography , , Computational Photography Fall 2018, Lecture 14
 Coded photography http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 14 Overview of today s lecture The coded photography paradigm. Dealing with
Coded photography http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 14 Overview of today s lecture The coded photography paradigm. Dealing with
How to Choose a Machine Vision Camera for Your Application.
 Vision Systems Design Webinar 9 September 2015 How to Choose a Machine Vision Camera for Your Application. Andrew Bodkin Bodkin Design & Engineering, LLC Newton, MA 02464 617-795-1968 wab@bodkindesign.com
Vision Systems Design Webinar 9 September 2015 How to Choose a Machine Vision Camera for Your Application. Andrew Bodkin Bodkin Design & Engineering, LLC Newton, MA 02464 617-795-1968 wab@bodkindesign.com
Coded Aperture Imaging
 Coded Aperture Imaging Manuel Martinello School of Engineering and Physical Sciences Heriot-Watt University A thesis submitted for the degree of PhilosophiæDoctor (PhD) May 2012 1. Reviewer: Prof. Richard
Coded Aperture Imaging Manuel Martinello School of Engineering and Physical Sciences Heriot-Watt University A thesis submitted for the degree of PhilosophiæDoctor (PhD) May 2012 1. Reviewer: Prof. Richard
Toward Non-stationary Blind Image Deblurring: Models and Techniques
 Toward Non-stationary Blind Image Deblurring: Models and Techniques Ji, Hui Department of Mathematics National University of Singapore NUS, 30-May-2017 Outline of the talk Non-stationary Image blurring
Toward Non-stationary Blind Image Deblurring: Models and Techniques Ji, Hui Department of Mathematics National University of Singapore NUS, 30-May-2017 Outline of the talk Non-stationary Image blurring
1. INTRODUCTION ABSTRACT
 Experimental verification of Sub-Wavelength Holographic Lithography physical concept for single exposure fabrication of complex structures on planar and non-planar surfaces Michael V. Borisov, Dmitry A.
Experimental verification of Sub-Wavelength Holographic Lithography physical concept for single exposure fabrication of complex structures on planar and non-planar surfaces Michael V. Borisov, Dmitry A.
NTU CSIE. Advisor: Wu Ja Ling, Ph.D.
 An Interactive Background Blurring Mechanism and Its Applications NTU CSIE Yan Chih Yu Advisor: Wu Ja Ling, Ph.D. 1 2 Outline Introduction Related Work Method Object Segmentation Depth Map Generation Image
An Interactive Background Blurring Mechanism and Its Applications NTU CSIE Yan Chih Yu Advisor: Wu Ja Ling, Ph.D. 1 2 Outline Introduction Related Work Method Object Segmentation Depth Map Generation Image
( ) Deriving the Lens Transmittance Function. Thin lens transmission is given by a phase with unit magnitude.
 Deriving the Lens Transmittance Function. Thin lens transmission is given by a phase with unit magnitude.") Deriving the Lens Transmittance Function Thin lens transmission is given by a phase with unit magnitude. t(x, y) = exp[ jk o ]exp[ jk(n 1) (x, y) ] Find the thickness function for left half of the lens
Deriving the Lens Transmittance Function Thin lens transmission is given by a phase with unit magnitude. t(x, y) = exp[ jk o ]exp[ jk(n 1) (x, y) ] Find the thickness function for left half of the lens
Lenses. Overview. Terminology. The pinhole camera. Pinhole camera Lenses Principles of operation Limitations
 Overview Pinhole camera Principles of operation Limitations 1 Terminology The pinhole camera The first camera - camera obscura - known to Aristotle. In 3D, we can visualize the blur induced by the pinhole
Overview Pinhole camera Principles of operation Limitations 1 Terminology The pinhole camera The first camera - camera obscura - known to Aristotle. In 3D, we can visualize the blur induced by the pinhole
Optical Engineering 421/521 Sample Questions for Midterm 1
 Optical Engineering 421/521 Sample Questions for Midterm 1 Short answer 1.) Sketch a pechan prism. Name a possible application of this prism., write the mirror matrix for this prism (or any other common
Optical Engineering 421/521 Sample Questions for Midterm 1 Short answer 1.) Sketch a pechan prism. Name a possible application of this prism., write the mirror matrix for this prism (or any other common
Light field sensing. Marc Levoy. Computer Science Department Stanford University
 Light field sensing Marc Levoy Computer Science Department Stanford University The scalar light field (in geometrical optics) Radiance as a function of position and direction in a static scene with fixed
Light field sensing Marc Levoy Computer Science Department Stanford University The scalar light field (in geometrical optics) Radiance as a function of position and direction in a static scene with fixed
Dr F. Cuzzolin 1. September 29, 2015
 P00407 Principles of Computer Vision 1 1 Department of Computing and Communication Technologies Oxford Brookes University, UK September 29, 2015 September 29, 2015 1 / 73 Outline of the Lecture 1 2 Basics
P00407 Principles of Computer Vision 1 1 Department of Computing and Communication Technologies Oxford Brookes University, UK September 29, 2015 September 29, 2015 1 / 73 Outline of the Lecture 1 2 Basics
What are Good Apertures for Defocus Deblurring?
 What are Good Apertures for Defocus Deblurring? Changyin Zhou, Shree Nayar Abstract In recent years, with camera pixels shrinking in size, images are more likely to include defocused regions. In order
What are Good Apertures for Defocus Deblurring? Changyin Zhou, Shree Nayar Abstract In recent years, with camera pixels shrinking in size, images are more likely to include defocused regions. In order
Optical basics for machine vision systems. Lars Fermum Chief instructor STEMMER IMAGING GmbH
 Optical basics for machine vision systems Lars Fermum Chief instructor STEMMER IMAGING GmbH www.stemmer-imaging.de AN INTERNATIONAL CONCEPT STEMMER IMAGING customers in UK Germany France Switzerland Sweden
Optical basics for machine vision systems Lars Fermum Chief instructor STEMMER IMAGING GmbH www.stemmer-imaging.de AN INTERNATIONAL CONCEPT STEMMER IMAGING customers in UK Germany France Switzerland Sweden
Confocal Imaging Through Scattering Media with a Volume Holographic Filter
 Confocal Imaging Through Scattering Media with a Volume Holographic Filter Michal Balberg +, George Barbastathis*, Sergio Fantini % and David J. Brady University of Illinois at Urbana-Champaign, Urbana,
Confocal Imaging Through Scattering Media with a Volume Holographic Filter Michal Balberg +, George Barbastathis*, Sergio Fantini % and David J. Brady University of Illinois at Urbana-Champaign, Urbana,
Coded photography , , Computational Photography Fall 2017, Lecture 18
 Coded photography http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 18 Course announcements Homework 5 delayed for Tuesday. - You will need cameras
Coded photography http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 18 Course announcements Homework 5 delayed for Tuesday. - You will need cameras
Transfer Efficiency and Depth Invariance in Computational Cameras
 Transfer Efficiency and Depth Invariance in Computational Cameras Jongmin Baek Stanford University IEEE International Conference on Computational Photography 2010 Jongmin Baek (Stanford University) Transfer
Transfer Efficiency and Depth Invariance in Computational Cameras Jongmin Baek Stanford University IEEE International Conference on Computational Photography 2010 Jongmin Baek (Stanford University) Transfer
ME 6406 MACHINE VISION. Georgia Institute of Technology
 ME 6406 MACHINE VISION Georgia Institute of Technology Class Information Instructor Professor Kok-Meng Lee MARC 474 Office hours: Tues/Thurs 1:00-2:00 pm kokmeng.lee@me.gatech.edu (404)-894-7402 Class
ME 6406 MACHINE VISION Georgia Institute of Technology Class Information Instructor Professor Kok-Meng Lee MARC 474 Office hours: Tues/Thurs 1:00-2:00 pm kokmeng.lee@me.gatech.edu (404)-894-7402 Class
The Camera : Computational Photography Alexei Efros, CMU, Fall 2005
 The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
Virtual and Digital Cameras
 CS148: Introduction to Computer Graphics and Imaging Virtual and Digital Cameras Ansel Adams Topics Effect Cause Field of view Film size, focal length Perspective Lens, focal length Focus Dist. of lens
CS148: Introduction to Computer Graphics and Imaging Virtual and Digital Cameras Ansel Adams Topics Effect Cause Field of view Film size, focal length Perspective Lens, focal length Focus Dist. of lens
Introduction. Related Work
 Introduction Depth of field is a natural phenomenon when it comes to both sight and photography. The basic ray tracing camera model is insufficient at representing this essential visual element and will
Introduction Depth of field is a natural phenomenon when it comes to both sight and photography. The basic ray tracing camera model is insufficient at representing this essential visual element and will
Projection. Readings. Szeliski 2.1. Wednesday, October 23, 13
 Projection Readings Szeliski 2.1 Projection Readings Szeliski 2.1 Müller-Lyer Illusion by Pravin Bhat Müller-Lyer Illusion by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html Müller-Lyer
Projection Readings Szeliski 2.1 Projection Readings Szeliski 2.1 Müller-Lyer Illusion by Pravin Bhat Müller-Lyer Illusion by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html Müller-Lyer
Computational Photography and Video. Prof. Marc Pollefeys
 Computational Photography and Video Prof. Marc Pollefeys Today s schedule Introduction of Computational Photography Course facts Syllabus Digital Photography What is computational photography Convergence
Computational Photography and Video Prof. Marc Pollefeys Today s schedule Introduction of Computational Photography Course facts Syllabus Digital Photography What is computational photography Convergence
3D light microscopy techniques
 3D light microscopy techniques The image of a point is a 3D feature In-focus image Out-of-focus image The image of a point is not a point Point Spread Function (PSF) 1D imaging 1 1 2! NA = 0.5! NA 2D imaging
3D light microscopy techniques The image of a point is a 3D feature In-focus image Out-of-focus image The image of a point is not a point Point Spread Function (PSF) 1D imaging 1 1 2! NA = 0.5! NA 2D imaging
Coded Aperture for Projector and Camera for Robust 3D measurement
 Coded Aperture for Projector and Camera for Robust 3D measurement Yuuki Horita Yuuki Matugano Hiroki Morinaga Hiroshi Kawasaki Satoshi Ono Makoto Kimura Yasuo Takane Abstract General active 3D measurement
Coded Aperture for Projector and Camera for Robust 3D measurement Yuuki Horita Yuuki Matugano Hiroki Morinaga Hiroshi Kawasaki Satoshi Ono Makoto Kimura Yasuo Takane Abstract General active 3D measurement
3D light microscopy techniques
 3D light microscopy techniques The image of a point is a 3D feature In-focus image Out-of-focus image The image of a point is not a point Point Spread Function (PSF) 1D imaging 2D imaging 3D imaging Resolution
3D light microscopy techniques The image of a point is a 3D feature In-focus image Out-of-focus image The image of a point is not a point Point Spread Function (PSF) 1D imaging 2D imaging 3D imaging Resolution
Demosaicing and Denoising on Simulated Light Field Images
 Demosaicing and Denoising on Simulated Light Field Images Trisha Lian Stanford University tlian@stanford.edu Kyle Chiang Stanford University kchiang@stanford.edu Abstract Light field cameras use an array
Demosaicing and Denoising on Simulated Light Field Images Trisha Lian Stanford University tlian@stanford.edu Kyle Chiang Stanford University kchiang@stanford.edu Abstract Light field cameras use an array
Name: Date: Math in Special Effects: Try Other Challenges. Student Handout
 Name: Date: Math in Special Effects: Try Other Challenges When filming special effects, a high-speed photographer needs to control the duration and impact of light by adjusting a number of settings, including
Name: Date: Math in Special Effects: Try Other Challenges When filming special effects, a high-speed photographer needs to control the duration and impact of light by adjusting a number of settings, including
Vision Research at. Validation of a Novel Hartmann-Moiré Wavefront Sensor with Large Dynamic Range. Wavefront Science Congress, Feb.
 Wavefront Science Congress, Feb. 2008 Validation of a Novel Hartmann-Moiré Wavefront Sensor with Large Dynamic Range Xin Wei 1, Tony Van Heugten 2, Nikole L. Himebaugh 1, Pete S. Kollbaum 1, Mei Zhang
Wavefront Science Congress, Feb. 2008 Validation of a Novel Hartmann-Moiré Wavefront Sensor with Large Dynamic Range Xin Wei 1, Tony Van Heugten 2, Nikole L. Himebaugh 1, Pete S. Kollbaum 1, Mei Zhang
Lecture 21: Cameras & Lenses II. Computer Graphics and Imaging UC Berkeley CS184/284A
 Lecture 21: Cameras & Lenses II Computer Graphics and Imaging UC Berkeley Real Lens Designs Are Highly Complex [Apple] Topic o next lecture Real Lens Elements Are Not Ideal Aberrations Real plano-convex
Lecture 21: Cameras & Lenses II Computer Graphics and Imaging UC Berkeley Real Lens Designs Are Highly Complex [Apple] Topic o next lecture Real Lens Elements Are Not Ideal Aberrations Real plano-convex
Lensless Imaging with a Controllable Aperture
 Lensless Imaging with a Controllable Aperture Assaf Zomet Shree K. Nayar Computer Science Department Columbia University New York, NY, 10027 E-mail: zomet@humaneyes.com, nayar@cs.columbia.edu Abstract
Lensless Imaging with a Controllable Aperture Assaf Zomet Shree K. Nayar Computer Science Department Columbia University New York, NY, 10027 E-mail: zomet@humaneyes.com, nayar@cs.columbia.edu Abstract
ECEN 4606, UNDERGRADUATE OPTICS LAB
 ECEN 4606, UNDERGRADUATE OPTICS LAB Lab 3: Imaging 2 the Microscope Original Version: Professor McLeod SUMMARY: In this lab you will become familiar with the use of one or more lenses to create highly
ECEN 4606, UNDERGRADUATE OPTICS LAB Lab 3: Imaging 2 the Microscope Original Version: Professor McLeod SUMMARY: In this lab you will become familiar with the use of one or more lenses to create highly
Simulated Programmable Apertures with Lytro
 Simulated Programmable Apertures with Lytro Yangyang Yu Stanford University yyu10@stanford.edu Abstract This paper presents a simulation method using the commercial light field camera Lytro, which allows
Simulated Programmable Apertures with Lytro Yangyang Yu Stanford University yyu10@stanford.edu Abstract This paper presents a simulation method using the commercial light field camera Lytro, which allows
Computational Approaches to Cameras
 Computational Approaches to Cameras 11/16/17 Magritte, The False Mirror (1935) Computational Photography Derek Hoiem, University of Illinois Announcements Final project proposal due Monday (see links on
Computational Approaches to Cameras 11/16/17 Magritte, The False Mirror (1935) Computational Photography Derek Hoiem, University of Illinois Announcements Final project proposal due Monday (see links on
Tradeoffs and Limits in Computational Imaging. Oliver Cossairt
 Tradeoffs and Limits in Computational Imaging Oliver Cossairt Submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy in the Graduate School of Arts and Sciences COLUMBIA
Tradeoffs and Limits in Computational Imaging Oliver Cossairt Submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy in the Graduate School of Arts and Sciences COLUMBIA
Basic principles of photography. David Capel 346B IST
 Basic principles of photography David Capel 346B IST Latin Camera Obscura = Dark Room Light passing through a small hole produces an inverted image on the opposite wall Safely observing the solar eclipse
Basic principles of photography David Capel 346B IST Latin Camera Obscura = Dark Room Light passing through a small hole produces an inverted image on the opposite wall Safely observing the solar eclipse
Aberrations and adaptive optics for biomedical microscopes
 Aberrations and adaptive optics for biomedical microscopes Martin Booth Department of Engineering Science And Centre for Neural Circuits and Behaviour University of Oxford Outline Rays, wave fronts and
Aberrations and adaptive optics for biomedical microscopes Martin Booth Department of Engineering Science And Centre for Neural Circuits and Behaviour University of Oxford Outline Rays, wave fronts and
Single-Image Shape from Defocus
 Single-Image Shape from Defocus José R.A. Torreão and João L. Fernandes Instituto de Computação Universidade Federal Fluminense 24210-240 Niterói RJ, BRAZIL Abstract The limited depth of field causes scene
Single-Image Shape from Defocus José R.A. Torreão and João L. Fernandes Instituto de Computação Universidade Federal Fluminense 24210-240 Niterói RJ, BRAZIL Abstract The limited depth of field causes scene
Cardinal Points of an Optical System--and Other Basic Facts
 Cardinal Points of an Optical System--and Other Basic Facts The fundamental feature of any optical system is the aperture stop. Thus, the most fundamental optical system is the pinhole camera. The image
Cardinal Points of an Optical System--and Other Basic Facts The fundamental feature of any optical system is the aperture stop. Thus, the most fundamental optical system is the pinhole camera. The image
The Generation of Depth Maps. via Depth-from-Defocus. William Edward Crofts
 The Generation of Depth Maps via Depth-from-Defocus by William Edward Crofts A thesis submitted in partial fulfilment of the requirements for the degree of Doctor of Philosophy School of Engineering University
The Generation of Depth Maps via Depth-from-Defocus by William Edward Crofts A thesis submitted in partial fulfilment of the requirements for the degree of Doctor of Philosophy School of Engineering University
Cameras As Computing Systems
 Cameras As Computing Systems Prof. Hank Dietz In Search Of Sensors University of Kentucky Electrical & Computer Engineering Things You Already Know The sensor is some kind of chip Most can't distinguish
Cameras As Computing Systems Prof. Hank Dietz In Search Of Sensors University of Kentucky Electrical & Computer Engineering Things You Already Know The sensor is some kind of chip Most can't distinguish
Cameras. CSE 455, Winter 2010 January 25, 2010
 Cameras CSE 455, Winter 2010 January 25, 2010 Announcements New Lecturer! Neel Joshi, Ph.D. Post-Doctoral Researcher Microsoft Research neel@cs Project 1b (seam carving) was due on Friday the 22 nd Project
Cameras CSE 455, Winter 2010 January 25, 2010 Announcements New Lecturer! Neel Joshi, Ph.D. Post-Doctoral Researcher Microsoft Research neel@cs Project 1b (seam carving) was due on Friday the 22 nd Project
Laboratory experiment aberrations
 Laboratory experiment aberrations Obligatory laboratory experiment on course in Optical design, SK2330/SK3330, KTH. Date Name Pass Objective This laboratory experiment is intended to demonstrate the most
Laboratory experiment aberrations Obligatory laboratory experiment on course in Optical design, SK2330/SK3330, KTH. Date Name Pass Objective This laboratory experiment is intended to demonstrate the most
with your guide, Kim Wolhuter Botswana 2018 Catalogue Gear up for the 1 perfect safari
 with your guide, Kim Wolhuter Botswana Gear up for the 1 perfect safari The Kit Everything that s needed to capture majestic landscapes, elusive birds, or minute miracles of nature: a professional-grade
with your guide, Kim Wolhuter Botswana Gear up for the 1 perfect safari The Kit Everything that s needed to capture majestic landscapes, elusive birds, or minute miracles of nature: a professional-grade
Cameras. Steve Rotenberg CSE168: Rendering Algorithms UCSD, Spring 2017
 Cameras Steve Rotenberg CSE168: Rendering Algorithms UCSD, Spring 2017 Camera Focus Camera Focus So far, we have been simulating pinhole cameras with perfect focus Often times, we want to simulate more
Cameras Steve Rotenberg CSE168: Rendering Algorithms UCSD, Spring 2017 Camera Focus Camera Focus So far, we have been simulating pinhole cameras with perfect focus Often times, we want to simulate more
Deconvolution , , Computational Photography Fall 2018, Lecture 12
 Deconvolution http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 12 Course announcements Homework 3 is out. - Due October 12 th. - Any questions?
Deconvolution http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 12 Course announcements Homework 3 is out. - Due October 12 th. - Any questions?
Sensitive measurement of partial coherence using a pinhole array
 1.3 Sensitive measurement of partial coherence using a pinhole array Paul Petruck 1, Rainer Riesenberg 1, Richard Kowarschik 2 1 Institute of Photonic Technology, Albert-Einstein-Strasse 9, 07747 Jena,
1.3 Sensitive measurement of partial coherence using a pinhole array Paul Petruck 1, Rainer Riesenberg 1, Richard Kowarschik 2 1 Institute of Photonic Technology, Albert-Einstein-Strasse 9, 07747 Jena,
Study of Graded Index and Truncated Apertures Using Speckle Images
 Study of Graded Index and Truncated Apertures Using Speckle Images A. M. Hamed Department of Physics, Faculty of Science, Ain Shams University, Cairo, 11566 Egypt amhamed73@hotmail.com Abstract- In this
Study of Graded Index and Truncated Apertures Using Speckle Images A. M. Hamed Department of Physics, Faculty of Science, Ain Shams University, Cairo, 11566 Egypt amhamed73@hotmail.com Abstract- In this
Study of self-interference incoherent digital holography for the application of retinal imaging
 Study of self-interference incoherent digital holography for the application of retinal imaging Jisoo Hong and Myung K. Kim Department of Physics, University of South Florida, Tampa, FL, US 33620 ABSTRACT
Study of self-interference incoherent digital holography for the application of retinal imaging Jisoo Hong and Myung K. Kim Department of Physics, University of South Florida, Tampa, FL, US 33620 ABSTRACT
ECEN 4606, UNDERGRADUATE OPTICS LAB
 ECEN 4606, UNDERGRADUATE OPTICS LAB Lab 2: Imaging 1 the Telescope Original Version: Prof. McLeod SUMMARY: In this lab you will become familiar with the use of one or more lenses to create images of distant
ECEN 4606, UNDERGRADUATE OPTICS LAB Lab 2: Imaging 1 the Telescope Original Version: Prof. McLeod SUMMARY: In this lab you will become familiar with the use of one or more lenses to create images of distant
Single Digital Image Multi-focusing Using Point to Point Blur Model Based Depth Estimation
 Single Digital mage Multi-focusing Using Point to Point Blur Model Based Depth Estimation Praveen S S, Aparna P R Abstract The proposed paper focuses on Multi-focusing, a technique that restores all-focused
Single Digital mage Multi-focusing Using Point to Point Blur Model Based Depth Estimation Praveen S S, Aparna P R Abstract The proposed paper focuses on Multi-focusing, a technique that restores all-focused
Better Imaging with a Schmidt-Czerny-Turner Spectrograph
 Better Imaging with a Schmidt-Czerny-Turner Spectrograph Abstract For years, images have been measured using Czerny-Turner (CT) design dispersive spectrographs. Optical aberrations inherent in the CT design
Better Imaging with a Schmidt-Czerny-Turner Spectrograph Abstract For years, images have been measured using Czerny-Turner (CT) design dispersive spectrographs. Optical aberrations inherent in the CT design