Announcement A total of 5 (five) late days are allowed for projects. Office hours
|
|
|
- Berniece Harrell
- 5 years ago
- Views:
Transcription
1 Announcement A total of 5 (five) late days are allowed for projects. Office hours Me: 3:50-4:50pm Thursday (or by appointment) Jake: 12:30-1:30PM Monday and Wednesday

2 Image Formation Digital Camera Film Alexei Efros slide The Eye
3 Image Formation Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable image? Steve Seitz s slide
4 Pinhole Camera Add a barrier to block off most of the rays This reduces blurring The opening known as the aperture How does this transform the image? Steve Seitz s slide
5 Camera Obscura The first camera 5 th B.C. Aristotle, Mozi (Chinese: 墨子 ) How does the aperture size affect the image?
6 Shrinking the aperture Why not make the aperture as small as possible? Less light gets through Diffraction effects...
7 Shrinking the aperture
8 Shrinking the aperture Sharpest image is obtained when: d 2 f d is diameter, f is distance from hole to film λ is the wavelength of light, all given in metres. Example: If f = 50mm, λ = 600nm (red), d = 0.36mm Srinivasa Narasimhan s slide

9 Pinhole cameras are popular Jerry Vincent's Pinhole Camera


10 Impressive Images Jerry Vincent's Pinhole Photos
11 What s wrong with Pinhole Cameras? Low incoming light => Long exposure time => Tripod KODAK Film or Paper Bright Sun Cloudy Bright TRI-X Pan 1 or 2 seconds 4 to 8 seconds T-MAX 100 Film 2 to 4 seconds 8 to 16 seconds KODABROMIDE Paper, F2 2 minutes 8 minutes

12 What s wrong with Pinhole Cameras People are ghosted

13 What s wrong with Pinhole Cameras People become ghosts!
14 Pinhole Camera Recap Pinhole size (aperture) must be very small to obtain a clear image. However, as pinhole size is made smaller, less light is received by image plane. If pinhole is comparable to wavelength of incoming light, DIFFRACTION effects blur the image!
15 What s the solution? Lens circle of confusion A lens focuses light onto the film There is a specific distance at which objects are in focus other points project to a circle of confusion in the image Changing the shape of the lens changes this distance Steve Seitz s slide
16 Thin lens optics Simplification of geometrical optics for well-behaved lenses All parallel rays converge to one point on a plane located at the focal length f f All rays going through the center are not deviated Hence same perspective as pinhole Frédo Durand s slide
17 Demo! (by Fu-Kwun Hwang )
18 Thin lens formula D f D Frédo Durand s slide
19 Thin lens formula Similar triangles everywhere! D f D Frédo Durand s slide
20 Thin lens formula Similar triangles everywhere! y /y = D /D y D f D y Frédo Durand s slide
21 Thin lens formula Similar triangles everywhere! D D f y y /y = D /D y /y = (D -f)/d y Frédo Durand s slide
22 Thin lens formula = 1 D D f D f D The focal length f determines the lens s ability to bend (refract) light. It is a function of the shape and index of refraction of the lens. Frédo Durand s slide
23 Film camera aperture & shutter scene lens & motor film YungYu Chuang s slide

24 Film camera Still Life, Louis Jaques Mande Daguerre, 1837 Srinivasa Narasimhan s slide

25 Before Film was invented Lens Based Camera Obscura, 1568 Srinivasa Narasimhan s slide



26 Silicon Image Detector Silicon Image Detector, 1970 Shree Nayar s slide
27 Digital camera aperture & shutter scene lens & motor sensor array A digital camera replaces film with a sensor array Each cell in the array is a light-sensitive diode that converts photons to electrons YungYu Chuang s slide
 means that we see through the same")

28 SLR (Single-Lens Reflex) Reflex (R in SLR) means that we see through the same lens used to take the image. Not the case for compact cameras YungYu Chuang s slide
")
 lens YungYu")
29 SLR view finder Prism Your eye Mirror (flipped for exposure) Film/sensor Light from scene Mirror (when viewing) lens YungYu Chuang s slide
30 Compound Lens System d final image i2 f2 o2 i 1 f1 object o 1 image plane intermediate lens 2 virtual image lens 1 Rule : Image formed by first lens is the object for the second lens. If d 0, the combined focal length f is f f1 f2 f f 1 2 Srinivasa Narasimhan s slide
31 Field of View (FoV) vs Focal Length Canon EF-S 60mm f/2.8 Canon EF 100mm f/2.8 Canon EF 180mm f/3.5




32 Field of View (FoV) vs Focal Length 24mm 50mm 135mm Frédo Durand s slide
33 Field of View (FoV) vs Focal Length i o Scene w α Sensor f Gaussian Lens Formula: 1 i 1 o 1 f Field of View: α = 2arctan(w/(2i)) 2arctan(w/(2f)) Example: w = 30mm, f = 50mm => α 33.4º Question: How does FoV change when we focus on closer objects?

34 Depth of Field Changing the aperture size affects depth of field. A smaller aperture increases the range in which the object is approximately in focus

35 Aperture Aperture is the diameter of the lens opening, usually specified by f-stop, f/d, a fraction of the focal length. f/2.0 on a 50mm means that the aperture is 25mm f/2.0 on a 100mm means that the aperture is 50mm When a change in f-stop occurs, the light is either doubled or cut in half. Lower f-stop, more light (larger lens opening) Higher f-stop, less light (smaller lens opening) YungYu Chuang s slide
36 f o i d aperture diameter aperture f o i 1 ' 1 ' 1 Gaussian Law: Blur Circle, b ') ( ) ( ) ' ( ) ' ( o o f o f f o f i i Blur Circle Diameter : ) ' ( ) ' ( ' i i f d i i i d b i i' o' o sensor d f f-stop: # F-stop

37 F-stop Canon EF-S 60mm f/2.8 Canon EF 100mm f/2.8 Canon EF 180mm f/3.5
38 Exposure Two main parameters: Aperture (in f stop) shutter speed (in fraction of a second) See



39 Effects of shutter speeds Slower shutter speed => more light, but more motion blur Faster shutter speed freezes motion YungYu Chuang s slide
40 Color So far, we ve only talked about monochrome sensors. Color imaging has been implemented in a number of ways: Field sequential Multi-chip Color filter array X3 sensor YungYu Chuang s slide

41 Field sequential YungYu Chuang s slide
42 Field sequential YungYu Chuang s slide

43 Field sequential YungYu Chuang s slide
 Lantern projector")

44 Prokudin-Gorskii (early 1900 s) Lantern projector YungYu Chuang s slide
 YungYu Chuang s")
45 Prokudin-Gorskii (early 1990 s) YungYu Chuang s slide
46 Multi-chip wavelength dependent YungYu Chuang s slide

47 Embedded color filters Color filters can be manufactured directly onto the photodetectors. YungYu Chuang s slide
48 Color filter array Bayer pattern Color filter arrays (CFAs)/color filter mosaics YungYu Chuang s slide
/color filter mosaics CMY YungYu Chuang s")
49 Color filter array Kodak DCS620x Color filter arrays (CFAs)/color filter mosaics CMY YungYu Chuang s slide

50 Why CMY CFA might be better YungYu Chuang s slide

51 Bayer s pattern YungYu Chuang s slide
52 Demosaicking CFA s bilinear interpolation original input linear interpolation YungYu Chuang s slide
53 Demosaicking CFA s Median-based interpolation (Freeman) 1. Linear interpolation 2. Median filter on color differences YungYu Chuang s slide
 original")

")
54 Demosaicking CFA s Median-based interpolation (Freeman) original input linear interpolation color difference (e.g. G-R) YungYu Chuang s slide median filter (kernel size 5) Reconstruction (G=R+filtered difference)

55 Demosaicking CFA s Generally, Freeman s is the best, especially for natural images. YungYu Chuang s slide


56 Foveon X3 sensor light penetrates to different depths for different wavelengths multilayer CMOS sensor gets 3 different spectral sensitivities YungYu Chuang s slide



57 Color filter array red green blue output YungYu Chuang s slide


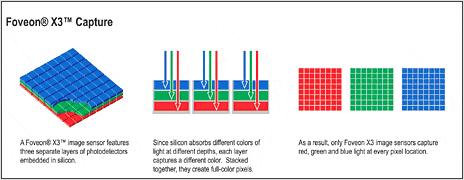
58 X3 technology red green blue output YungYu Chuang s slide


59 Foveon X3 sensor Bayer CFA X3 sensor YungYu Chuang s slide


60 Cameras with X3 Sigma SD10, SD9 Polaroid X530 YungYu Chuang s slide

61 Sigma SD9 vs Canon D30 YungYu Chuang s slide
62 Color processing After color values are recorded, more color processing usually happens: White balance Non-linearity to approximate film response or match TV monitor gamma YungYu Chuang s slide


63 Auto White Balance warmer automatic white balance YungYu Chuang s slide


64 Auto White Balance The auto white balance was unable to find a white reference, resulting in dull and artificial colors. The auto white balance got it right this time in a very similar scene because it could use the clouds as its white reference.

65 Manual white balance white balance with the white book white balance with the red book YungYu Chuang s slide
66 Lens related issues: Coumpound Thick Lens principal planes nodal points thickness

67 Lens related issues: Vignetting Vignetting L3 L 2 L 1 B A more light from A than B!


68 Lens related issues: Vignetting Vignetting L3 L 2 L 1 B A more light from A than B! original corrected Goldman & Seitz ICCV 2005


69 Lens related issues: Chromatic Abberation Lens has different refractive indices for different wavelengths. Special lens systems using two or more pieces of glass with different refractive indexes can reduce or eliminate this problem.
70 Lens related issues: Distortion No distortion Pin cushion Barrel Radial distortion of the image Caused by imperfect lenses Deviations are most noticeable for rays that pass through the edge of the lens Steve Seitz s slide


71 Correcting radial distortion from Helmut Dersch Steve Seitz s slide
72 Digital camera review website
CS559: Computer Graphics. Lecture 2: Image Formation in Eyes and Cameras Li Zhang Spring 2008
 CS559: Computer Graphics Lecture 2: Image Formation in Eyes and Cameras Li Zhang Spring 2008 Today Eyes Cameras Light Why can we see? Visible Light and Beyond Infrared, e.g. radio wave longer wavelength
CS559: Computer Graphics Lecture 2: Image Formation in Eyes and Cameras Li Zhang Spring 2008 Today Eyes Cameras Light Why can we see? Visible Light and Beyond Infrared, e.g. radio wave longer wavelength
Cameras. Shrinking the aperture. Camera trial #1. Pinhole camera. Digital Visual Effects Yung-Yu Chuang. Put a piece of film in front of an object.
 Camera trial #1 Cameras Digital Visual Effects Yung-Yu Chuang scene film with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros Put a piece of film in front of an object. Pinhole camera
Camera trial #1 Cameras Digital Visual Effects Yung-Yu Chuang scene film with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros Put a piece of film in front of an object. Pinhole camera
Cameras. Outline. Pinhole camera. Camera trial #1. Pinhole camera Film camera Digital camera Video camera
 Outline Cameras Pinhole camera Film camera Digital camera Video camera Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/3/6 with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros
Outline Cameras Pinhole camera Film camera Digital camera Video camera Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/3/6 with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros
Cameras. Digital Visual Effects, Spring 2008 Yung-Yu Chuang 2008/2/26. with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros
 Cameras Digital Visual Effects, Spring 2008 Yung-Yu Chuang 2008/2/26 with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros Camera trial #1 scene film Put a piece of film in front of
Cameras Digital Visual Effects, Spring 2008 Yung-Yu Chuang 2008/2/26 with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros Camera trial #1 scene film Put a piece of film in front of
Cameras. Outline. Pinhole camera. Camera trial #1. Pinhole camera Film camera Digital camera Video camera High dynamic range imaging
 Outline Cameras Pinhole camera Film camera Digital camera Video camera High dynamic range imaging Digital Visual Effects, Spring 2006 Yung-Yu Chuang 2006/3/1 with slides by Fedro Durand, Brian Curless,
Outline Cameras Pinhole camera Film camera Digital camera Video camera High dynamic range imaging Digital Visual Effects, Spring 2006 Yung-Yu Chuang 2006/3/1 with slides by Fedro Durand, Brian Curless,
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 4a: Cameras Source: S. Lazebnik Reading Szeliski chapter 2.2.3, 2.3 Image formation Let s design a camera Idea 1: put a piece of film in front of an object
CS6670: Computer Vision Noah Snavely Lecture 4a: Cameras Source: S. Lazebnik Reading Szeliski chapter 2.2.3, 2.3 Image formation Let s design a camera Idea 1: put a piece of film in front of an object
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 5: Cameras and Projection Szeliski 2.1.3-2.1.6 Reading Announcements Project 1 assigned, see projects page: http://www.cs.cornell.edu/courses/cs6670/2011sp/projects/projects.html
CS6670: Computer Vision Noah Snavely Lecture 5: Cameras and Projection Szeliski 2.1.3-2.1.6 Reading Announcements Project 1 assigned, see projects page: http://www.cs.cornell.edu/courses/cs6670/2011sp/projects/projects.html
Building a Real Camera. Slides Credit: Svetlana Lazebnik
 Building a Real Camera Slides Credit: Svetlana Lazebnik Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible?
Building a Real Camera Slides Credit: Svetlana Lazebnik Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible?
Acquisition. Some slides from: Yung-Yu Chuang (DigiVfx) Jan Neumann, Pat Hanrahan, Alexei Efros
 Jan Neumann, Pat Hanrahan, Alexei Efros") Acquisition Some slides from: Yung-Yu Chuang (DigiVfx) Jan Neumann, Pat Hanrahan, Alexei Efros Image Acquisition Digital Camera Film Outline Pinhole camera Lens Lens aberrations Exposure Sensors Noise
Acquisition Some slides from: Yung-Yu Chuang (DigiVfx) Jan Neumann, Pat Hanrahan, Alexei Efros Image Acquisition Digital Camera Film Outline Pinhole camera Lens Lens aberrations Exposure Sensors Noise
Two strategies for realistic rendering capture real world data synthesize from bottom up
 Recap from Wednesday Two strategies for realistic rendering capture real world data synthesize from bottom up Both have existed for 500 years. Both are successful. Attempts to take the best of both world
Recap from Wednesday Two strategies for realistic rendering capture real world data synthesize from bottom up Both have existed for 500 years. Both are successful. Attempts to take the best of both world
Building a Real Camera
 Building a Real Camera Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible? Less light gets through Diffraction
Building a Real Camera Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible? Less light gets through Diffraction
The Camera : Computational Photography Alexei Efros, CMU, Fall 2008
 The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
Projection. Announcements. Müller-Lyer Illusion. Image formation. Readings Nalwa 2.1
 Announcements Mailing list (you should have received messages) Project 1 additional test sequences online Projection Readings Nalwa 2.1 Müller-Lyer Illusion Image formation object film by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html
Announcements Mailing list (you should have received messages) Project 1 additional test sequences online Projection Readings Nalwa 2.1 Müller-Lyer Illusion Image formation object film by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html
LENSES. INEL 6088 Computer Vision
 LENSES INEL 6088 Computer Vision Digital camera A digital camera replaces film with a sensor array Each cell in the array is a Charge Coupled Device light-sensitive diode that converts photons to electrons
LENSES INEL 6088 Computer Vision Digital camera A digital camera replaces film with a sensor array Each cell in the array is a Charge Coupled Device light-sensitive diode that converts photons to electrons
Cameras. CSE 455, Winter 2010 January 25, 2010
 Cameras CSE 455, Winter 2010 January 25, 2010 Announcements New Lecturer! Neel Joshi, Ph.D. Post-Doctoral Researcher Microsoft Research neel@cs Project 1b (seam carving) was due on Friday the 22 nd Project
Cameras CSE 455, Winter 2010 January 25, 2010 Announcements New Lecturer! Neel Joshi, Ph.D. Post-Doctoral Researcher Microsoft Research neel@cs Project 1b (seam carving) was due on Friday the 22 nd Project
The Camera : Computational Photography Alexei Efros, CMU, Fall 2005
 The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
Projection. Readings. Szeliski 2.1. Wednesday, October 23, 13
 Projection Readings Szeliski 2.1 Projection Readings Szeliski 2.1 Müller-Lyer Illusion by Pravin Bhat Müller-Lyer Illusion by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html Müller-Lyer
Projection Readings Szeliski 2.1 Projection Readings Szeliski 2.1 Müller-Lyer Illusion by Pravin Bhat Müller-Lyer Illusion by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html Müller-Lyer
6.098 Digital and Computational Photography Advanced Computational Photography. Bill Freeman Frédo Durand MIT - EECS
 6.098 Digital and Computational Photography 6.882 Advanced Computational Photography Bill Freeman Frédo Durand MIT - EECS Administrivia PSet 1 is out Due Thursday February 23 Digital SLR initiation? During
6.098 Digital and Computational Photography 6.882 Advanced Computational Photography Bill Freeman Frédo Durand MIT - EECS Administrivia PSet 1 is out Due Thursday February 23 Digital SLR initiation? During
Projection. Projection. Image formation. Müller-Lyer Illusion. Readings. Readings. Let s design a camera. Szeliski 2.1. Szeliski 2.
 Projection Projection Readings Szeliski 2.1 Readings Szeliski 2.1 Müller-Lyer Illusion Image formation object film by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html Let s design a camera
Projection Projection Readings Szeliski 2.1 Readings Szeliski 2.1 Müller-Lyer Illusion Image formation object film by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html Let s design a camera
VC 11/12 T2 Image Formation
 VC 11/12 T2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
VC 11/12 T2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
VC 14/15 TP2 Image Formation
 VC 14/15 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
VC 14/15 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
Unit 1: Image Formation
 Unit 1: Image Formation 1. Geometry 2. Optics 3. Photometry 4. Sensor Readings Szeliski 2.1-2.3 & 6.3.5 1 Physical parameters of image formation Geometric Type of projection Camera pose Optical Sensor
Unit 1: Image Formation 1. Geometry 2. Optics 3. Photometry 4. Sensor Readings Szeliski 2.1-2.3 & 6.3.5 1 Physical parameters of image formation Geometric Type of projection Camera pose Optical Sensor
Computational Photography and Video. Prof. Marc Pollefeys
 Computational Photography and Video Prof. Marc Pollefeys Today s schedule Introduction of Computational Photography Course facts Syllabus Digital Photography What is computational photography Convergence
Computational Photography and Video Prof. Marc Pollefeys Today s schedule Introduction of Computational Photography Course facts Syllabus Digital Photography What is computational photography Convergence
Computer Vision. The Pinhole Camera Model
 Computer Vision The Pinhole Camera Model Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2017/2018 Imaging device
Computer Vision The Pinhole Camera Model Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2017/2018 Imaging device
Lenses, exposure, and (de)focus
focus") Lenses, exposure, and (de)focus http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 15 Course announcements Homework 4 is out. - Due October 26
Lenses, exposure, and (de)focus http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 15 Course announcements Homework 4 is out. - Due October 26
Image Formation and Capture. Acknowledgment: some figures by B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, and A. Theuwissen
 Image Formation and Capture Acknowledgment: some figures by B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, and A. Theuwissen Image Formation and Capture Real world Optics Sensor Devices Sources of Error
Image Formation and Capture Acknowledgment: some figures by B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, and A. Theuwissen Image Formation and Capture Real world Optics Sensor Devices Sources of Error
Image formation - Cameras. Grading & Project. About the course. Tentative Schedule. Course Content. Students introduction
 About the course Instructors: Haibin Ling (hbling@temple, Wachman 35) Hours Lecture: Tuesda 5:3-8:pm, TTLMAN 43B Office hour: Tuesda 3: - 5:pm, or b appointment Textbook Computer Vision: Models, Learning,
About the course Instructors: Haibin Ling (hbling@temple, Wachman 35) Hours Lecture: Tuesda 5:3-8:pm, TTLMAN 43B Office hour: Tuesda 3: - 5:pm, or b appointment Textbook Computer Vision: Models, Learning,
Basic principles of photography. David Capel 346B IST
 Basic principles of photography David Capel 346B IST Latin Camera Obscura = Dark Room Light passing through a small hole produces an inverted image on the opposite wall Safely observing the solar eclipse
Basic principles of photography David Capel 346B IST Latin Camera Obscura = Dark Room Light passing through a small hole produces an inverted image on the opposite wall Safely observing the solar eclipse
CSE 473/573 Computer Vision and Image Processing (CVIP)
") CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 4 Image formation(part I) Schedule Last class linear algebra overview Today Image formation and camera properties
CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 4 Image formation(part I) Schedule Last class linear algebra overview Today Image formation and camera properties
Cameras and Sensors. Today. Today. It receives light from all directions. BIL721: Computational Photography! Spring 2015, Lecture 2!
 !! Cameras and Sensors Today Pinhole camera! Lenses! Exposure! Sensors! photo by Abelardo Morell BIL721: Computational Photography! Spring 2015, Lecture 2! Aykut Erdem! Hacettepe University! Computer Vision
!! Cameras and Sensors Today Pinhole camera! Lenses! Exposure! Sensors! photo by Abelardo Morell BIL721: Computational Photography! Spring 2015, Lecture 2! Aykut Erdem! Hacettepe University! Computer Vision
How do we see the world?
 The Camera 1 How do we see the world? Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable image? Credit: Steve Seitz 2 Pinhole camera Idea 2: Add a barrier to
The Camera 1 How do we see the world? Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable image? Credit: Steve Seitz 2 Pinhole camera Idea 2: Add a barrier to
Prof. Feng Liu. Spring /05/2017
 Prof. Feng Liu Spring 2017 http://www.cs.pdx.edu/~fliu/courses/cs510/ 04/05/2017 Last Time Course overview Admin. Info Computational Photography 2 Today Digital Camera History of Camera Controlling Camera
Prof. Feng Liu Spring 2017 http://www.cs.pdx.edu/~fliu/courses/cs510/ 04/05/2017 Last Time Course overview Admin. Info Computational Photography 2 Today Digital Camera History of Camera Controlling Camera
Image Formation III Chapter 1 (Forsyth&Ponce) Cameras Lenses & Sensors
 Cameras Lenses & Sensors") Image Formation III Chapter 1 (Forsyth&Ponce) Cameras Lenses & Sensors Guido Gerig CS-GY 6643, Spring 2017 (slides modified from Marc Pollefeys, UNC Chapel Hill/ ETH Zurich, With content from Prof. Trevor
Image Formation III Chapter 1 (Forsyth&Ponce) Cameras Lenses & Sensors Guido Gerig CS-GY 6643, Spring 2017 (slides modified from Marc Pollefeys, UNC Chapel Hill/ ETH Zurich, With content from Prof. Trevor
VC 16/17 TP2 Image Formation
 VC 16/17 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Hélder Filipe Pinto de Oliveira Outline Computer Vision? The Human Visual
VC 16/17 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Hélder Filipe Pinto de Oliveira Outline Computer Vision? The Human Visual
Image Formation and Capture
 Figure credits: B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, A. Theuwissen, and J. Malik Image Formation and Capture COS 429: Computer Vision Image Formation and Capture Real world Optics Sensor Devices
Figure credits: B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, A. Theuwissen, and J. Malik Image Formation and Capture COS 429: Computer Vision Image Formation and Capture Real world Optics Sensor Devices
Lecture 7: Camera Models
 Lecture 7: Camera Models Professor Stanford Vision Lab 1 What we will learn toda? Pinhole cameras Cameras & lenses The geometr of pinhole cameras Reading: [FP]Chapters 1 3 [HZ] Chapter 6 2 What we will
Lecture 7: Camera Models Professor Stanford Vision Lab 1 What we will learn toda? Pinhole cameras Cameras & lenses The geometr of pinhole cameras Reading: [FP]Chapters 1 3 [HZ] Chapter 6 2 What we will
IMAGE FORMATION. Light source properties. Sensor characteristics Surface. Surface reflectance properties. Optics
 IMAGE FORMATION Light source properties Sensor characteristics Surface Exposure shape Optics Surface reflectance properties ANALOG IMAGES An image can be understood as a 2D light intensity function f(x,y)
IMAGE FORMATION Light source properties Sensor characteristics Surface Exposure shape Optics Surface reflectance properties ANALOG IMAGES An image can be understood as a 2D light intensity function f(x,y)
Lecture 02 Image Formation 1
 Institute of Informatics Institute of Neuroinformatics Lecture 02 Image Formation 1 Davide Scaramuzza http://rpg.ifi.uzh.ch 1 Lab Exercise 1 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work
Institute of Informatics Institute of Neuroinformatics Lecture 02 Image Formation 1 Davide Scaramuzza http://rpg.ifi.uzh.ch 1 Lab Exercise 1 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work
Cameras, lenses and sensors
 Cameras, lenses and sensors Marc Pollefeys COMP 256 Cameras, lenses and sensors Camera Models Pinhole Perspective Projection Affine Projection Camera with Lenses Sensing The Human Eye Reading: Chapter.
Cameras, lenses and sensors Marc Pollefeys COMP 256 Cameras, lenses and sensors Camera Models Pinhole Perspective Projection Affine Projection Camera with Lenses Sensing The Human Eye Reading: Chapter.
Image Formation. Dr. Gerhard Roth. COMP 4102A Winter 2015 Version 3
 Image Formation Dr. Gerhard Roth COMP 4102A Winter 2015 Version 3 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
Image Formation Dr. Gerhard Roth COMP 4102A Winter 2015 Version 3 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
Lenses. Overview. Terminology. The pinhole camera. Pinhole camera Lenses Principles of operation Limitations
 Overview Pinhole camera Principles of operation Limitations 1 Terminology The pinhole camera The first camera - camera obscura - known to Aristotle. In 3D, we can visualize the blur induced by the pinhole
Overview Pinhole camera Principles of operation Limitations 1 Terminology The pinhole camera The first camera - camera obscura - known to Aristotle. In 3D, we can visualize the blur induced by the pinhole
CS 443: Imaging and Multimedia Cameras and Lenses
 CS 443: Imaging and Multimedia Cameras and Lenses Spring 2008 Ahmed Elgammal Dept of Computer Science Rutgers University Outlines Cameras and lenses! 1 They are formed by the projection of 3D objects.
CS 443: Imaging and Multimedia Cameras and Lenses Spring 2008 Ahmed Elgammal Dept of Computer Science Rutgers University Outlines Cameras and lenses! 1 They are formed by the projection of 3D objects.
Chapter 25 Optical Instruments
 Chapter 25 Optical Instruments Units of Chapter 25 Cameras, Film, and Digital The Human Eye; Corrective Lenses Magnifying Glass Telescopes Compound Microscope Aberrations of Lenses and Mirrors Limits of
Chapter 25 Optical Instruments Units of Chapter 25 Cameras, Film, and Digital The Human Eye; Corrective Lenses Magnifying Glass Telescopes Compound Microscope Aberrations of Lenses and Mirrors Limits of
OPTICAL SYSTEMS OBJECTIVES
 101 L7 OPTICAL SYSTEMS OBJECTIVES Aims Your aim here should be to acquire a working knowledge of the basic components of optical systems and understand their purpose, function and limitations in terms
101 L7 OPTICAL SYSTEMS OBJECTIVES Aims Your aim here should be to acquire a working knowledge of the basic components of optical systems and understand their purpose, function and limitations in terms
Lab 2 Geometrical Optics
 Lab 2 Geometrical Optics March 22, 202 This material will span much of 2 lab periods. Get through section 5.4 and time permitting, 5.5 in the first lab. Basic Equations Lensmaker s Equation for a thin
Lab 2 Geometrical Optics March 22, 202 This material will span much of 2 lab periods. Get through section 5.4 and time permitting, 5.5 in the first lab. Basic Equations Lensmaker s Equation for a thin
Applied Optics. , Physics Department (Room #36-401) , ,
 , ,") Applied Optics Professor, Physics Department (Room #36-401) 2290-0923, 019-539-0923, shsong@hanyang.ac.kr Office Hours Mondays 15:00-16:30, Wednesdays 15:00-16:30 TA (Ph.D. student, Room #36-415) 2290-0921,
Applied Optics Professor, Physics Department (Room #36-401) 2290-0923, 019-539-0923, shsong@hanyang.ac.kr Office Hours Mondays 15:00-16:30, Wednesdays 15:00-16:30 TA (Ph.D. student, Room #36-415) 2290-0921,
Lecture 22: Cameras & Lenses III. Computer Graphics and Imaging UC Berkeley CS184/284A, Spring 2017
 Lecture 22: Cameras & Lenses III Computer Graphics and Imaging UC Berkeley, Spring 2017 F-Number For Lens vs. Photo A lens s F-Number is the maximum for that lens E.g. 50 mm F/1.4 is a high-quality telephoto
Lecture 22: Cameras & Lenses III Computer Graphics and Imaging UC Berkeley, Spring 2017 F-Number For Lens vs. Photo A lens s F-Number is the maximum for that lens E.g. 50 mm F/1.4 is a high-quality telephoto
Chapter 18 Optical Elements
 Chapter 18 Optical Elements GOALS When you have mastered the content of this chapter, you will be able to achieve the following goals: Definitions Define each of the following terms and use it in an operational
Chapter 18 Optical Elements GOALS When you have mastered the content of this chapter, you will be able to achieve the following goals: Definitions Define each of the following terms and use it in an operational
Basic Camera Concepts. How to properly utilize your camera
 Basic Camera Concepts How to properly utilize your camera Basic Concepts Shutter speed One stop Aperture, f/stop Depth of field and focal length / focus distance Shutter Speed When the shutter is closed
Basic Camera Concepts How to properly utilize your camera Basic Concepts Shutter speed One stop Aperture, f/stop Depth of field and focal length / focus distance Shutter Speed When the shutter is closed
Lecture 2 Camera Models
 Lecture 2 Camera Models Professor Silvio Savarese Computational Vision and Geometr Lab Silvio Savarese Lecture 2-4-Jan-4 Announcements Prerequisites: an questions? This course requires knowledge of linear
Lecture 2 Camera Models Professor Silvio Savarese Computational Vision and Geometr Lab Silvio Savarese Lecture 2-4-Jan-4 Announcements Prerequisites: an questions? This course requires knowledge of linear
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Sensors and Image Formation Imaging sensors and models of image formation Coordinate systems Digital
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Sensors and Image Formation Imaging sensors and models of image formation Coordinate systems Digital
Buxton & District U3A Digital Photography Beginners Group
 U3A Group Lesson 7: Controlling exposure / focal length / perspective / composition for a better picture & Taking Pictures of people 3 December 2013 Programme Buxton & District 19 September Exploring your
U3A Group Lesson 7: Controlling exposure / focal length / perspective / composition for a better picture & Taking Pictures of people 3 December 2013 Programme Buxton & District 19 September Exploring your
Cameras. Steve Rotenberg CSE168: Rendering Algorithms UCSD, Spring 2017
 Cameras Steve Rotenberg CSE168: Rendering Algorithms UCSD, Spring 2017 Camera Focus Camera Focus So far, we have been simulating pinhole cameras with perfect focus Often times, we want to simulate more
Cameras Steve Rotenberg CSE168: Rendering Algorithms UCSD, Spring 2017 Camera Focus Camera Focus So far, we have been simulating pinhole cameras with perfect focus Often times, we want to simulate more
TSBB09 Image Sensors 2018-HT2. Image Formation Part 1
 TSBB09 Image Sensors 2018-HT2 Image Formation Part 1 Basic physics Electromagnetic radiation consists of electromagnetic waves With energy That propagate through space The waves consist of transversal
TSBB09 Image Sensors 2018-HT2 Image Formation Part 1 Basic physics Electromagnetic radiation consists of electromagnetic waves With energy That propagate through space The waves consist of transversal
Image Formation: Camera Model
 Image Formation: Camera Model Ruigang Yang COMP 684 Fall 2005, CS684-IBMR Outline Camera Models Pinhole Perspective Projection Affine Projection Camera with Lenses Digital Image Formation The Human Eye
Image Formation: Camera Model Ruigang Yang COMP 684 Fall 2005, CS684-IBMR Outline Camera Models Pinhole Perspective Projection Affine Projection Camera with Lenses Digital Image Formation The Human Eye
Overview. Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image
 Camera & Color Overview Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image Book: Hartley 6.1, Szeliski 2.1.5, 2.2, 2.3 The trip
Camera & Color Overview Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image Book: Hartley 6.1, Szeliski 2.1.5, 2.2, 2.3 The trip
Chapters 1 & 2. Definitions and applications Conceptual basis of photogrammetric processing
 Chapters 1 & 2 Chapter 1: Photogrammetry Definitions and applications Conceptual basis of photogrammetric processing Transition from two-dimensional imagery to three-dimensional information Automation
Chapters 1 & 2 Chapter 1: Photogrammetry Definitions and applications Conceptual basis of photogrammetric processing Transition from two-dimensional imagery to three-dimensional information Automation
Waves & Oscillations
 Physics 42200 Waves & Oscillations Lecture 27 Geometric Optics Spring 205 Semester Matthew Jones Sign Conventions > + = Convex surface: is positive for objects on the incident-light side is positive for
Physics 42200 Waves & Oscillations Lecture 27 Geometric Optics Spring 205 Semester Matthew Jones Sign Conventions > + = Convex surface: is positive for objects on the incident-light side is positive for
Where Vision and Silicon Meet
 History and Future of Electronic Color Photography: Where Vision and Silicon Meet Richard F. Lyon Chief Scientist Foveon, Inc. UC Berkeley Photography class of Prof. Brian Barksy February 20, 2004 Color
History and Future of Electronic Color Photography: Where Vision and Silicon Meet Richard F. Lyon Chief Scientist Foveon, Inc. UC Berkeley Photography class of Prof. Brian Barksy February 20, 2004 Color
History and Future of Electronic Color Photography: Where Vision and Silicon Meet
 History and Future of Electronic Color Photography: Where Vision and Silicon Meet Richard F. Lyon Chief Scientist Foveon, Inc. UC Berkeley Photography class of Prof. Brian Barksy February 20, 2004 Color
History and Future of Electronic Color Photography: Where Vision and Silicon Meet Richard F. Lyon Chief Scientist Foveon, Inc. UC Berkeley Photography class of Prof. Brian Barksy February 20, 2004 Color
Image acquisition. In both cases, the digital sensing element is one of the following: Line array Area array. Single sensor
 Image acquisition Digital images are acquired by direct digital acquisition (digital still/video cameras), or scanning material acquired as analog signals (slides, photographs, etc.). In both cases, the
Image acquisition Digital images are acquired by direct digital acquisition (digital still/video cameras), or scanning material acquired as analog signals (slides, photographs, etc.). In both cases, the
Dr F. Cuzzolin 1. September 29, 2015
 P00407 Principles of Computer Vision 1 1 Department of Computing and Communication Technologies Oxford Brookes University, UK September 29, 2015 September 29, 2015 1 / 73 Outline of the Lecture 1 2 Basics
P00407 Principles of Computer Vision 1 1 Department of Computing and Communication Technologies Oxford Brookes University, UK September 29, 2015 September 29, 2015 1 / 73 Outline of the Lecture 1 2 Basics
CPSC 425: Computer Vision
 1 / 55 CPSC 425: Computer Vision Instructor: Fred Tung ftung@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2015/2016 Term 2 2 / 55 Menu January 7, 2016 Topics: Image
1 / 55 CPSC 425: Computer Vision Instructor: Fred Tung ftung@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2015/2016 Term 2 2 / 55 Menu January 7, 2016 Topics: Image
Astronomical Cameras
 Astronomical Cameras I. The Pinhole Camera Pinhole Camera (or Camera Obscura) Whenever light passes through a small hole or aperture it creates an image opposite the hole This is an effect wherever apertures
Astronomical Cameras I. The Pinhole Camera Pinhole Camera (or Camera Obscura) Whenever light passes through a small hole or aperture it creates an image opposite the hole This is an effect wherever apertures
Computational Approaches to Cameras
 Computational Approaches to Cameras 11/16/17 Magritte, The False Mirror (1935) Computational Photography Derek Hoiem, University of Illinois Announcements Final project proposal due Monday (see links on
Computational Approaches to Cameras 11/16/17 Magritte, The False Mirror (1935) Computational Photography Derek Hoiem, University of Illinois Announcements Final project proposal due Monday (see links on
Image Formation. World Optics Sensor Signal. Computer Vision. Introduction to. Light (Energy) Source. Surface Imaging Plane. Pinhole Lens.
 Source. Surface Imaging Plane. Pinhole Lens.") Image Formation Light (Energy) Source Surface Imaging Plane Pinhole Lens World Optics Sensor Signal B&W Film Color Film TV Camera Silver Density Silver density in three color layers Electrical Today Optics:
Image Formation Light (Energy) Source Surface Imaging Plane Pinhole Lens World Optics Sensor Signal B&W Film Color Film TV Camera Silver Density Silver density in three color layers Electrical Today Optics:
Optical Systems: Pinhole Camera Pinhole camera: simple hole in a box: Called Camera Obscura Aristotle discussed, Al-Hazen analyzed in Book of Optics
 Optical Systems: Pinhole Camera Pinhole camera: simple hole in a box: Called Camera Obscura Aristotle discussed, Al-Hazen analyzed in Book of Optics 1011CE Restricts rays: acts as a single lens: inverts
Optical Systems: Pinhole Camera Pinhole camera: simple hole in a box: Called Camera Obscura Aristotle discussed, Al-Hazen analyzed in Book of Optics 1011CE Restricts rays: acts as a single lens: inverts
Virtual and Digital Cameras
 CS148: Introduction to Computer Graphics and Imaging Virtual and Digital Cameras Ansel Adams Topics Effect Cause Field of view Film size, focal length Perspective Lens, focal length Focus Dist. of lens
CS148: Introduction to Computer Graphics and Imaging Virtual and Digital Cameras Ansel Adams Topics Effect Cause Field of view Film size, focal length Perspective Lens, focal length Focus Dist. of lens
To Do. Advanced Computer Graphics. Outline. Computational Imaging. How do we see the world? Pinhole camera
 Advanced Computer Graphics CSE 163 [Spring 2017], Lecture 14 Ravi Ramamoorthi http://www.cs.ucsd.edu/~ravir To Do Assignment 2 due May 19 Any last minute issues or questions? Next two lectures: Imaging,
Advanced Computer Graphics CSE 163 [Spring 2017], Lecture 14 Ravi Ramamoorthi http://www.cs.ucsd.edu/~ravir To Do Assignment 2 due May 19 Any last minute issues or questions? Next two lectures: Imaging,
brief history of photography foveon X3 imager technology description
 brief history of photography foveon X3 imager technology description imaging technology 30,000 BC chauvet-pont-d arc pinhole camera principle first described by Aristotle fourth century B.C. oldest known
brief history of photography foveon X3 imager technology description imaging technology 30,000 BC chauvet-pont-d arc pinhole camera principle first described by Aristotle fourth century B.C. oldest known
CSE 527: Introduction to Computer Vision
 CSE 527: Introduction to Computer Vision Week 2 - Class 2: Vision, Physics, Cameras September 7th, 2017 Today Physics Human Vision Eye Brain Perspective Projection Camera Models Image Formation Digital
CSE 527: Introduction to Computer Vision Week 2 - Class 2: Vision, Physics, Cameras September 7th, 2017 Today Physics Human Vision Eye Brain Perspective Projection Camera Models Image Formation Digital
Computational Cameras. Rahul Raguram COMP
 Computational Cameras Rahul Raguram COMP 790-090 What is a computational camera? Camera optics Camera sensor 3D scene Traditional camera Final image Modified optics Camera sensor Image Compute 3D scene
Computational Cameras Rahul Raguram COMP 790-090 What is a computational camera? Camera optics Camera sensor 3D scene Traditional camera Final image Modified optics Camera sensor Image Compute 3D scene
Reflectors vs. Refractors
 1 Telescope Types - Telescopes collect and concentrate light (which can then be magnified, dispersed as a spectrum, etc). - In the end it is the collecting area that counts. - There are two primary telescope
1 Telescope Types - Telescopes collect and concentrate light (which can then be magnified, dispersed as a spectrum, etc). - In the end it is the collecting area that counts. - There are two primary telescope
Mastering Y our Your Digital Camera
 Mastering Your Digital Camera The Exposure Triangle The ISO setting on your camera defines how sensitive it is to light. Normally ISO 100 is the least sensitive setting on your camera and as the ISO numbers
Mastering Your Digital Camera The Exposure Triangle The ISO setting on your camera defines how sensitive it is to light. Normally ISO 100 is the least sensitive setting on your camera and as the ISO numbers
Wavelengths and Colors. Ankit Mohan MAS.131/531 Fall 2009
 Wavelengths and Colors Ankit Mohan MAS.131/531 Fall 2009 Epsilon over time (Multiple photos) Prokudin-Gorskii, Sergei Mikhailovich, 1863-1944, photographer. Congress. Epsilon over time (Bracketing) Image
Wavelengths and Colors Ankit Mohan MAS.131/531 Fall 2009 Epsilon over time (Multiple photos) Prokudin-Gorskii, Sergei Mikhailovich, 1863-1944, photographer. Congress. Epsilon over time (Bracketing) Image
A Simple Camera Model
 A Simple Camera Model Carlo Tomasi The images we process in computer vision are formed by light bouncing off surfaces in the world and into the lens of the camera. The light then hits an array of sensors
A Simple Camera Model Carlo Tomasi The images we process in computer vision are formed by light bouncing off surfaces in the world and into the lens of the camera. The light then hits an array of sensors
Cameras, lenses, and sensors
 Cameras, lenses, and sensors Reading: Chapter 1, Forsyth & Ponce Optional: Section 2.1, 2.3, Horn. 6.801/6.866 Profs. Bill Freeman and Trevor Darrell Sept. 10, 2002 Today s lecture How many people would
Cameras, lenses, and sensors Reading: Chapter 1, Forsyth & Ponce Optional: Section 2.1, 2.3, Horn. 6.801/6.866 Profs. Bill Freeman and Trevor Darrell Sept. 10, 2002 Today s lecture How many people would
Lens Aperture. South Pasadena High School Final Exam Study Guide- 1 st Semester Photo ½. Study Guide Topics that will be on the Final Exam
 South Pasadena High School Final Exam Study Guide- 1 st Semester Photo ½ Study Guide Topics that will be on the Final Exam The Rule of Thirds Depth of Field Lens and its properties Aperture and F-Stop
South Pasadena High School Final Exam Study Guide- 1 st Semester Photo ½ Study Guide Topics that will be on the Final Exam The Rule of Thirds Depth of Field Lens and its properties Aperture and F-Stop
Applications of Optics
 Nicholas J. Giordano www.cengage.com/physics/giordano Chapter 26 Applications of Optics Marilyn Akins, PhD Broome Community College Applications of Optics Many devices are based on the principles of optics
Nicholas J. Giordano www.cengage.com/physics/giordano Chapter 26 Applications of Optics Marilyn Akins, PhD Broome Community College Applications of Optics Many devices are based on the principles of optics
What will be on the midterm?
 What will be on the midterm? CS 178, Spring 2014 Marc Levoy Computer Science Department Stanford University General information 2 Monday, 7-9pm, Cubberly Auditorium (School of Edu) closed book, no notes
What will be on the midterm? CS 178, Spring 2014 Marc Levoy Computer Science Department Stanford University General information 2 Monday, 7-9pm, Cubberly Auditorium (School of Edu) closed book, no notes
Converging and Diverging Surfaces. Lenses. Converging Surface
 Lenses Sandy Skoglund 2 Converging and Diverging s AIR Converging If the surface is convex, it is a converging surface in the sense that the parallel rays bend toward each other after passing through the
Lenses Sandy Skoglund 2 Converging and Diverging s AIR Converging If the surface is convex, it is a converging surface in the sense that the parallel rays bend toward each other after passing through the
ECEN 4606, UNDERGRADUATE OPTICS LAB
 ECEN 4606, UNDERGRADUATE OPTICS LAB Lab 2: Imaging 1 the Telescope Original Version: Prof. McLeod SUMMARY: In this lab you will become familiar with the use of one or more lenses to create images of distant
ECEN 4606, UNDERGRADUATE OPTICS LAB Lab 2: Imaging 1 the Telescope Original Version: Prof. McLeod SUMMARY: In this lab you will become familiar with the use of one or more lenses to create images of distant
Image stitching. Image stitching. Video summarization. Applications of image stitching. Stitching = alignment + blending. geometrical registration
 Image stitching Stitching = alignment + blending Image stitching geometrical registration photometric registration Digital Visual Effects, Spring 2006 Yung-Yu Chuang 2005/3/22 with slides by Richard Szeliski,
Image stitching Stitching = alignment + blending Image stitching geometrical registration photometric registration Digital Visual Effects, Spring 2006 Yung-Yu Chuang 2005/3/22 with slides by Richard Szeliski,
EE119 Introduction to Optical Engineering Spring 2003 Final Exam. Name:
 EE119 Introduction to Optical Engineering Spring 2003 Final Exam Name: SID: CLOSED BOOK. THREE 8 1/2 X 11 SHEETS OF NOTES, AND SCIENTIFIC POCKET CALCULATOR PERMITTED. TIME ALLOTTED: 180 MINUTES Fundamental
EE119 Introduction to Optical Engineering Spring 2003 Final Exam Name: SID: CLOSED BOOK. THREE 8 1/2 X 11 SHEETS OF NOTES, AND SCIENTIFIC POCKET CALCULATOR PERMITTED. TIME ALLOTTED: 180 MINUTES Fundamental
Phys214 Fall 2004 Midterm Form A
 1. A clear sheet of polaroid is placed on top of a similar sheet so that their polarizing axes make an angle of 30 with each other. The ratio of the intensity of emerging light to incident unpolarized
1. A clear sheet of polaroid is placed on top of a similar sheet so that their polarizing axes make an angle of 30 with each other. The ratio of the intensity of emerging light to incident unpolarized
ABC Math Student Copy. N. May ABC Math Student Copy. Physics Week 13(Sem. 2) Name. Light Chapter Summary Cont d 2
 Name. Light Chapter Summary Cont d 2") Page 1 of 12 Physics Week 13(Sem. 2) Name Light Chapter Summary Cont d 2 Lens Abberation Lenses can have two types of abberation, spherical and chromic. Abberation occurs when the rays forming an image
Page 1 of 12 Physics Week 13(Sem. 2) Name Light Chapter Summary Cont d 2 Lens Abberation Lenses can have two types of abberation, spherical and chromic. Abberation occurs when the rays forming an image
PHYSICS FOR THE IB DIPLOMA CAMBRIDGE UNIVERSITY PRESS
 Option C Imaging C Introduction to imaging Learning objectives In this section we discuss the formation of images by lenses and mirrors. We will learn how to construct images graphically as well as algebraically.
Option C Imaging C Introduction to imaging Learning objectives In this section we discuss the formation of images by lenses and mirrors. We will learn how to construct images graphically as well as algebraically.
ME 6406 MACHINE VISION. Georgia Institute of Technology
 ME 6406 MACHINE VISION Georgia Institute of Technology Class Information Instructor Professor Kok-Meng Lee MARC 474 Office hours: Tues/Thurs 1:00-2:00 pm kokmeng.lee@me.gatech.edu (404)-894-7402 Class
ME 6406 MACHINE VISION Georgia Institute of Technology Class Information Instructor Professor Kok-Meng Lee MARC 474 Office hours: Tues/Thurs 1:00-2:00 pm kokmeng.lee@me.gatech.edu (404)-894-7402 Class
Advanced Camera and Image Sensor Technology. Steve Kinney Imaging Professional Camera Link Chairman
 Advanced Camera and Image Sensor Technology Steve Kinney Imaging Professional Camera Link Chairman Content Physical model of a camera Definition of various parameters for EMVA1288 EMVA1288 and image quality
Advanced Camera and Image Sensor Technology Steve Kinney Imaging Professional Camera Link Chairman Content Physical model of a camera Definition of various parameters for EMVA1288 EMVA1288 and image quality
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 2 Aug 24 th, 2017 Slides from Dr. Shishir K Shah, Rajesh Rao and Frank (Qingzhong) Liu 1 Instructor TA Digital Image Processing COSC 6380/4393 Pranav Mantini
Digital Image Processing COSC 6380/4393 Lecture 2 Aug 24 th, 2017 Slides from Dr. Shishir K Shah, Rajesh Rao and Frank (Qingzhong) Liu 1 Instructor TA Digital Image Processing COSC 6380/4393 Pranav Mantini
6.A44 Computational Photography
 Add date: Friday 6.A44 Computational Photography Depth of Field Frédo Durand We allow for some tolerance What happens when we close the aperture by two stop? Aperture diameter is divided by two is doubled
Add date: Friday 6.A44 Computational Photography Depth of Field Frédo Durand We allow for some tolerance What happens when we close the aperture by two stop? Aperture diameter is divided by two is doubled
Lecture 9. Lecture 9. t (min)
") Sensitivity of the Eye Lecture 9 The eye is capable of dark adaptation. This comes about by opening of the iris, as well as a change in rod cell photochemistry fovea only least perceptible brightness 10
Sensitivity of the Eye Lecture 9 The eye is capable of dark adaptation. This comes about by opening of the iris, as well as a change in rod cell photochemistry fovea only least perceptible brightness 10
Lecture 7: Camera Models
 Lecture 7: Camera Models Professor Fei- Fei Li Stanford Vision Lab Lecture 7 -! 1 What we will learn toda? Pinhole cameras Cameras & lenses The geometr of pinhole cameras Reading: [FP] Chapters 1 3 [HZ]
Lecture 7: Camera Models Professor Fei- Fei Li Stanford Vision Lab Lecture 7 -! 1 What we will learn toda? Pinhole cameras Cameras & lenses The geometr of pinhole cameras Reading: [FP] Chapters 1 3 [HZ]
Light. Path of Light. Looking at things. Depth and Distance. Getting light to imager. CS559 Lecture 2 Lights, Cameras, Eyes
 CS559 Lecture 2 Lights, Cameras, Eyes These are course notes (not used as slides) Written by Mike Gleicher, Sept. 2005 Adjusted after class stuff we didn t get to removed / mistakes fixed Light Electromagnetic
CS559 Lecture 2 Lights, Cameras, Eyes These are course notes (not used as slides) Written by Mike Gleicher, Sept. 2005 Adjusted after class stuff we didn t get to removed / mistakes fixed Light Electromagnetic
Topic 9 - Sensors Within
 Topic 9 - Sensors Within Learning Outcomes In this topic, we will take a closer look at sensor sizes in digital cameras. By the end of this video you will have a better understanding of what the various
Topic 9 - Sensors Within Learning Outcomes In this topic, we will take a closer look at sensor sizes in digital cameras. By the end of this video you will have a better understanding of what the various
PHY385H1F Introductory Optics. Practicals Session 7 Studying for Test 2
 PHY385H1F Introductory Optics Practicals Session 7 Studying for Test 2 Entrance Pupil & Exit Pupil A Cooke-triplet consists of three thin lenses in succession, and is often used in cameras. It was patented
PHY385H1F Introductory Optics Practicals Session 7 Studying for Test 2 Entrance Pupil & Exit Pupil A Cooke-triplet consists of three thin lenses in succession, and is often used in cameras. It was patented
Coding and Modulation in Cameras
 Coding and Modulation in Cameras Amit Agrawal June 2010 Mitsubishi Electric Research Labs (MERL) Cambridge, MA, USA Coded Computational Imaging Agrawal, Veeraraghavan, Narasimhan & Mohan Schedule Introduction
Coding and Modulation in Cameras Amit Agrawal June 2010 Mitsubishi Electric Research Labs (MERL) Cambridge, MA, USA Coded Computational Imaging Agrawal, Veeraraghavan, Narasimhan & Mohan Schedule Introduction
To start there are three key properties that you need to understand: ISO (sensitivity)
") Some Photo Fundamentals Photography is at once relatively simple and technically confusing at the same time. The camera is basically a black box with a hole in its side camera comes from camera obscura,
Some Photo Fundamentals Photography is at once relatively simple and technically confusing at the same time. The camera is basically a black box with a hole in its side camera comes from camera obscura,
Complete the diagram to show what happens to the rays. ... (1) What word can be used to describe this type of lens? ... (1)
 What word can be used to describe this type of lens? ... (1)") Q1. (a) The diagram shows two parallel rays of light, a lens and its axis. Complete the diagram to show what happens to the rays. (2) Name the point where the rays come together. (iii) What word can be
Q1. (a) The diagram shows two parallel rays of light, a lens and its axis. Complete the diagram to show what happens to the rays. (2) Name the point where the rays come together. (iii) What word can be
Lens Openings & Shutter Speeds
 Illustrations courtesy Life Magazine Encyclopedia of Photography Lens Openings & Shutter Speeds Controlling Exposure & the Rendering of Space and Time Equal Lens Openings/ Double Exposure Time Here is
Illustrations courtesy Life Magazine Encyclopedia of Photography Lens Openings & Shutter Speeds Controlling Exposure & the Rendering of Space and Time Equal Lens Openings/ Double Exposure Time Here is