Coded Aperture for Projector and Camera for Robust 3D measurement
|
|
|
- Meagan Jacobs
- 6 years ago
- Views:
Transcription
1 Coded Aperture for Projector and Camera for Robust 3D measurement Yuuki Horita Yuuki Matugano Hiroki Morinaga Hiroshi Kawasaki Satoshi Ono Makoto Kimura Yasuo Takane Abstract General active 3D measurement system using structured light is based on triangulation, which requires correspondence between projection pattern and camera observed pattern. Since both the projected pattern and the camera image should be in focus on the target, the condition makes a severe limitation on depth range of 3D measurement. In this paper, we propose a technique using coded aperture (CA) for projector and camera system to relax the limitation. In our method, Depth from Defocus (DfD) technique is used to resolve the defocus of projected pattern. By allowing blurry pattern of projection, measurement range is extended compared to common structured light methods. Further, overlapped blur pattern can also be resolved with our technique. 1 Introduction Active 3D measurement systems based on structured light, first, retrieve correspondences between projected patterns and observed patterns, and then, 3D information is recovered by triangulation. To retrieve the correspondence accurately, the patterns should be captured clearly by the camera. Thus, both the camera and the pattern projector should be in focus on the target; we need a severe condition for the setting of them. Since depth of field (DOF) of projector is usually narrower than that of camera because of a limitation on power of light source, the DOF of projector usually limits the range of 3D measurement. One essential solution for the problem is to use special light source which emits straight beam without blur such as laser. However, making a dense and complicated 2D pattern with laser is not easy and using strong laser has safety issue also. In this paper, we propose a new structured light based 3D reconstruction technique in which strong blur effects are allowed. To devise the blur efficiently with structured light, we use coded aperture on the light source and camera with DfD technique. Since the technique actively uses blur effect, projector s narrow DOF could be advantageous and the measurement accuracy Department of Information Science and Biomedical Engineering, Faculty of Engineering, Kagoshima University Samsung Yokohama Research Institute Co.,Ltd. can be improved under blurry condition. Main contributions of the paper are as follows. 1. Measurement accuracy on blurry pattern can be improved by using CA in projector and camera. 2. Based on deconvolution technique, overlapped pattern can be used for reconstruction. 3. Projector and camera w/wo CA is evaluated. 2 Related work Currently, active 3D measurement devices are widely available [5, 6]. They are usually based on triangulation using structured light because it has practical advantages in the accuracy and cost effectiveness. To conduct triangulation, accurate and dense correspondences are required [1] and all of these methods assume that the optics of both the pattern projector and the camera are well focused on the target surface. This makes actual measurement range severely limited. One of the solution for the problem is to use a focus-free pattern projection (i.e., laser beam [6]). Our proposed method is taking another approach using defocused pattern with common light source. The techniques of DfD is well known for camera system [8], but not for projector system. Moreno-Noguer et al. [7] proposed DfD using pattern projector s defocus not camera s defocus. They used a grid of dots, so that each observed dot s defocus can reflect its own depth information. Since goal of the paper [7] was not 3D measurement, but for image refocusing, the projection dot were sparse. Instead, since our purpose is to measure the depth, dense pattern is required. In such case, patterns are inevitably overlapped each other when blur becomes large, and thus, solution is required. Recently, CA theory and techniques are researched in the field of Computational Photography[9, 4]In the technique, the non-circular aperture is used, many special post-processes can be realized, e.g., motion deblurring [10], all-focus image [9], DfD [4], etc. In contrast, there are few researches about CA in projector. Grosse et al. proposed a data projection system including programmable CA[3]. They made use of CA theory for expanding projector s physical DOF, but not for 3D measurement.
. Screen Aperture x xf xp xa Lens f O Figure 1. Optical system Figure 2. Designing with a half mirror Figure 3.")
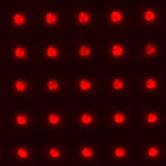
2 Image plane dp da Camera LED Light shape of pattern differs according to system noise, we actually tested several patterns to find best parameter for the system. With our system, we used σ =0.001 and actual pattern is shown in Fig.4 (a). Screen Aperture x xf xp xa Lens f O Figure 1. Optical system Figure 2. Designing with a half mirror Figure 3. Actual optical system 3 System configuration The proposed system consists of lens, LED, CCD and CA as shown in Fig.1. Since the proposed technique is based on DfD, it is ideal if the system is designed with a half mirror as shown in Fig2 to capture images without distortion. However, since construction of actual system with a half mirror is not easy and light intensity is severely decreased i.e.half or less, we take another option. In our technique, we installed a projector s lens and a camera as close as possible; such configuration is allowed because baseline is not required with our system. In terms of light source, we use an array of LEDs for prototype. Because each LED is independently arranged, resolution is low, however, it is just for evaluation purpose and it is not an actual limitation of the system. We can either put a CA in a video projector, micro-array-lens or diffractive optical element (DOE), if we need high resolution. In terms of design of CA, we used a pattern generated by genetic algorithms for DfD [11]. Since the 4 Depth from defocus of projected pattern With the proposed technique, shape is reconstructed by DfD using defocus blur of reflected light pattern which is projected from a projector with CA. The technique mainly consists of two steps: the first is a calibration step which carries out estimation of parameter of blur effects for each depth and the second is a shape reconstruction step which estimates the depth of the reflected pattern on the object. Note that the former calibration process is only required once for the system. In addition, it is assumed that the intrinsic parameter of a camera is calibrated by known algorithm e.g., opencv [2]. 4.1 Calibration of defocus of light source For usual structured light based 3D measurement system, it is assumed that the reflected pattern is sharp enough with little blur. On the other hand, since strong blur is expected with our technique, the parameters which represent defocus effects should be calibrated i.e., the parameters to describe point spread function (PSF). Although the shape of the PSF varies dependent on both depth (scaling) and noise, main factor is a scaling. By using the extrinsic camera and projector parameters, scaling can be calculated and PSF for specific depth can be created from shape of CA. However, in our case, PSF is a convolution of two CAs of projector and camera, and thus, it is difficult to make accurate PSF for specific depth using only the extrinsic parameters. Based on the above facts, instead of creating the PSF with the extrinsic parameters, we capture actual blur pattern for several depths to estimate the scaling parameters to create PSFs. With the approach, although a calibration process becomes complicated, more accurate blur effect can be obtained. Further, extrinsic calibration of camera and projector is not required. For actual calibration, first, the blur pattern using CA is projected on a flat board and several images are captured by changing the depth of the board. Since we use LEDs as light source which can be approximated as point light source, the projected pattern can be considered as a PSF itself (Fig.4). To estimate the scaling parameters for PSF from captured images, we actually apply deconvolution to the captured images, changing the scaling parameter of PSF to search the best scaling parameter where deconvolved image is most similar to the original one. Since it is


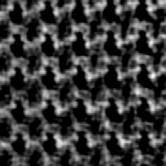
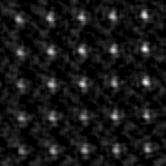
3 (a) Coded (b) depth (c) depth (d) depth (e) depth Aperture 250mm 280mm 300mm 330mm Figure 4. Projected and captured CA. Note that all the captured patterns are blurry because CA is set in both projector and camera. a 2D search and there are two scaling parameters for camera and projector, we conduct full-search to retrieve solution. In terms of deconvolution algorithm, we use Wiener filter deconvolution technique [9]. 4.2 Depth estimation by deconvolution In the proposed method, a pattern is projected onto the target object so that the depth can be estimated from the observed defocus. Fig.5 shows the algorithm. Since we measure the defocusing parameters (scaling parameters of camera and projector in our method) by sampled known depths, we conduct deconvolution using all the PSFs for all depth. Then, we consider the filter in which the deconvolution result is most close to the original projection pattern represents the correct depth. If defocus is strong or dot density is high, the defocused dots will overlap. However, by using the correct filter, the overlap of the pattern can be canceled by the deconvolution, and thus, we can get the depth of individual dots without interference of the overlap. This is one of the strength of our method. For the estimation of the best deconvolution filter, simple solution is to calculate the similarity between projection pattern and deconvolution result. For similarity measurement, sum of squared distance (SSD) can be used. However, actual deconvolution result usually has error and similarity calculation with SSD becomes sometimes unstable. Therefore, we also try another method to find the best filter. Since we use LED for light source, which has extremely strong intensity in small 1.Project the pattern on a target object and capture it area, doconvolved image should have a single strong peak when the best filter is applied. Based on it, we use the following equation to decide the depth. d =argmaxp(d i (I)) (1) i where p represents a function to calculate peak value in image and D i represents deconvolution with filter of depth i. If light source can be considered to be a point light source, we take this method. Since, we have the calibrated filters at the coarsely sampled depths, we have to estimate the sub-sampling parameters to acquire the fine depth values. In the paper, we linearly interpolate PSF. 5 Experiments We constructed an actual system and conducted experiments to show the effectiveness of the method. The actual system is shown in Fig6. We used an achromatic lens with 150mm focal length and 50mm diameter. CCD camera is resolution and red LED array of 660nm arranged resolution was used. Size of CA was 35mm 35mm and a distance between the lens and the light source was 300mm. In the system, since we only used a single lens, large distortion appeared at the peripheral region of reflected pattern. Therefore, we only used a center of the pattern where strong distortion was not observed. Such distortion can be eliminated by certain optical design and it is our important future work. We calibrated PSF with 10mm intervals and estimate the depth with 1mm order. 5.1 Calibration of defocus We calibrated PSF, and estimated scaling parameter with changing depth. We projected blur pattern using CA on a flat board and captured with 10mm interval changing the depth in the 250 to 350 mm range. A part of results is shown in Fig.4. Fig.?? show the example of 2D search and the estimated scaling parameters from these images are shown in Fig.7. We can find that smooth curves are acquired by our calibration technique. 2. Deconvole the image using the filter of specific depth 3. Calculate the fitness between the deconvolved image and original pattern Last depth? No Yes 4. Find the best fit depth Figure 5. Reconstruction algorithm Coded Aperture in Camera Figure 6. Equipment and measurement scene.
 Estimated scaling parameters.")


 CA in both projector and camera")






 CA in both projector")







, shapes are correctly")






4 (a) 2D search space to find scaling parameters. (b) Estimated scaling parameters. Figure 7. Calibration results of PSF. Table 1. Restored images using PSFs of each distance. 1) CA only in projector setting. input filter depth 250mm 290mm 350mm depth 250mm depth 290mm depth 350mm Deconvolution results 3) CA in both projector and camera setting. input filter depth 250mm 290mm 350mm depth 250mm (a) (b) (c) (d) Figure 8. Flat board capturing configuration and captured images. depth 290mm 5.2 Plane estimation for evaluation Fig.8 shows the relationship between the device and the board. The light irradiated from LED array is reflected on the board and reflected patterns are observed on the target object. Then, the patterns are captured by the camera and shapes are reconstructed. We conducted experiments with three different settings, such as 1) CA only in projector, 2) CA only in camera and 3) CA in both projector and camera. Table 1 shows the captured patterns (left column) and deconvolved images by calibrated parameter with each depth filter of setting 1) and 3). We can confirm that deconvolved images with correct depth filter restored a sharp pattern. Using those restored images, we can estimate the depth. Results are shown in Fig.9. From the figure, we can confirm that the shapes are correctly restored with our technique. Note that, even with largely blurred images which make a large overlapping area between the patterns (e.g., depth 25 or 35), shapes are correctly reconstructed; with such blurry patterns, shapes cannot be restored by conventional structured light method. depth 350mm Deconvolution results Fig.10 shows the average and standard deviation of the depth. From the figures, we can see that the result of setting 1) is the best with average error. However, the standard deviation of 1) increases when the depth is in focus; this is because without blur, ambiguity increases with DfD and setting 3) is better than 1) near in-focus zone. We consider that a camera blur helps to decrease the ambiguity in a complementary manner. 5.3 Arbitrary shape estimation Next, we estimated a depth of more general objects. We measured the white statue as shown in Fig.11(a). Center of the statue is placed at 270mm apart from the lens. Fig.11(b) shows the reflected pattern and (c) and (d) show the reconstruction results. We can see that although blur patterns are overlapped each other, the shape is robustly restored with our technique. At the same time, we can observe unstable reconstruction at
target object (b)captured image (a) Average error (b) Standard deviation Figure")
reconstructed result with pseudo-color some parts of the object.")



![7 Acknowledgment This work was supported in part by SCOPE #101710002 and NeXT program LR030 in Japan. References [1] J.](/docs-images/76/73871489/images/5-5.jpg "Batlle, E. M. Mouaddib, and J. Salvi.")

![respondence problem: a survey. Pattern Recognition, 31(7):963 982, 1998. [2] G. Bradski and A. Kaehler.](/docs-images/76/73871489/images/5-7.jpg "Learning OpenCV: Computer Vision with the OpenCV Library. O Reilly Media, Oct. 2008. [3] M. Grosse and O. Bimber.")
![Coded aperture projection. In SIGGRAPH, 2008. [4] A. Levin, R. Fergus, F. Durand, and W. T. Freeman.](/docs-images/76/73871489/images/5-8.jpg "Image and depth from a conventional camera with a coded aperture. In SIGGRAPH, 2007. [5] Mesa Imaging AG.")
![SwissRanger SR-4000, 2011. http://www.swissranger.ch/index.php. [6] Microsoft. Xbox 360 Kinect, 2010. http://www.xbox.](/docs-images/76/73871489/images/5-9.jpg "com/en-us/kinect. [7] F. Moreno-Noguer, P. N. Belhumeur, and S. K. Nayar. Active Refocusing of Images and Videos.")
![ACM Trans. on Graphics (also Proc. of ACM SIGGRAPH), Aug 2007. [8] S. Murali and G. Natarajan.](/docs-images/76/73871489/images/5-10.jpg "Depth recovery from blurred edges,. In CVPR, 1988. [9] H. Nagahara, S. Kuthirummal, C. Zhou,, and S. K. Nayar.")
5 (a) CA only in Projector (b) CA only in Camera (c) CA in both Projector and Camera Figure 9. Restoration of flat board results (a)target object (b)captured image (a) Average error (b) Standard deviation Figure 10. Statistical results. In-focus depth of projector is 290mm and 180mm for camera. (c)reconstructed result with pseudo-color some parts of the object. We consider this is because the camera was placed a bit distant from the lens of projector and patterns are distorted especially at slanted parts. Such effects are expected to be resolved by using a halfmirror and it is our future work. 6 Conclusion In this paper, we propose a structured light based 3D measurement system using CA. By using our system, blur effects are efficiently resolved with DfD on both camera and projector. In the experiment, we verified that the shape can be recovered with high accuracy by our method and showed that the curved surfaces are successfully reconstructed. In the future, using a halfmirror to avoid distortions is considered. 7 Acknowledgment This work was supported in part by SCOPE # and NeXT program LR030 in Japan. References [1] J. Batlle, E. M. Mouaddib, and J. Salvi. Recent progress in coded structured light as a technique to solve the cor- (d)shape with texture Al- Figure 11. Reconstruction result. though small errors exist, shapes are robustly reconstructed under overlapped patterns. respondence problem: a survey. Pattern Recognition, 31(7): , [2] G. Bradski and A. Kaehler. Learning OpenCV: Computer Vision with the OpenCV Library. O Reilly Media, Oct [3] M. Grosse and O. Bimber. Coded aperture projection. In SIGGRAPH, [4] A. Levin, R. Fergus, F. Durand, and W. T. Freeman. Image and depth from a conventional camera with a coded aperture. In SIGGRAPH, [5] Mesa Imaging AG. SwissRanger SR-4000, [6] Microsoft. Xbox 360 Kinect, [7] F. Moreno-Noguer, P. N. Belhumeur, and S. K. Nayar. Active Refocusing of Images and Videos. ACM Trans. on Graphics (also Proc. of ACM SIGGRAPH), Aug [8] S. Murali and G. Natarajan. Depth recovery from blurred edges,. In CVPR, [9] H. Nagahara, S. Kuthirummal, C. Zhou,, and S. K. Nayar. Flexible depth of field photography. In ECCV, [10] R. Raskar, A. Agrawal, and J. Tumblin. Coded exposure photography: Motion deblurring using fluttered shutter. In SIGGRAPH, [11] C. Zhou and S. K. Nayar. What are Good Apertures for Defocus Deblurring? In IEEE International Conference on Computational Photography, Apr 2009.
Coded Computational Photography!
 Coded Computational Photography! EE367/CS448I: Computational Imaging and Display! stanford.edu/class/ee367! Lecture 9! Gordon Wetzstein! Stanford University! Coded Computational Photography - Overview!!
Coded Computational Photography! EE367/CS448I: Computational Imaging and Display! stanford.edu/class/ee367! Lecture 9! Gordon Wetzstein! Stanford University! Coded Computational Photography - Overview!!
Implementation of Adaptive Coded Aperture Imaging using a Digital Micro-Mirror Device for Defocus Deblurring
 Implementation of Adaptive Coded Aperture Imaging using a Digital Micro-Mirror Device for Defocus Deblurring Ashill Chiranjan and Bernardt Duvenhage Defence, Peace, Safety and Security Council for Scientific
Implementation of Adaptive Coded Aperture Imaging using a Digital Micro-Mirror Device for Defocus Deblurring Ashill Chiranjan and Bernardt Duvenhage Defence, Peace, Safety and Security Council for Scientific
Dappled Photography: Mask Enhanced Cameras for Heterodyned Light Fields and Coded Aperture Refocusing
 Dappled Photography: Mask Enhanced Cameras for Heterodyned Light Fields and Coded Aperture Refocusing Ashok Veeraraghavan, Ramesh Raskar, Ankit Mohan & Jack Tumblin Amit Agrawal, Mitsubishi Electric Research
Dappled Photography: Mask Enhanced Cameras for Heterodyned Light Fields and Coded Aperture Refocusing Ashok Veeraraghavan, Ramesh Raskar, Ankit Mohan & Jack Tumblin Amit Agrawal, Mitsubishi Electric Research
Active one-shot scan for wide depth range using a light field projector based on coded aperture
 Active one-shot scan for wide depth range using a light field projector based on coded aperture Hiroshi Kawasaki, Satoshi Ono, Yuki, Horita, Yuki Shiba Kagoshima University Kagoshima, Japan {kawasaki,ono}@ibe.kagoshima-u.ac.jp
Active one-shot scan for wide depth range using a light field projector based on coded aperture Hiroshi Kawasaki, Satoshi Ono, Yuki, Horita, Yuki Shiba Kagoshima University Kagoshima, Japan {kawasaki,ono}@ibe.kagoshima-u.ac.jp
 Project 4 Results http://www.cs.brown.edu/courses/cs129/results/proj4/jcmace/ http://www.cs.brown.edu/courses/cs129/results/proj4/damoreno/ http://www.cs.brown.edu/courses/csci1290/results/proj4/huag/
Project 4 Results http://www.cs.brown.edu/courses/cs129/results/proj4/jcmace/ http://www.cs.brown.edu/courses/cs129/results/proj4/damoreno/ http://www.cs.brown.edu/courses/csci1290/results/proj4/huag/
Deblurring. Basics, Problem definition and variants
 Deblurring Basics, Problem definition and variants Kinds of blur Hand-shake Defocus Credit: Kenneth Josephson Motion Credit: Kenneth Josephson Kinds of blur Spatially invariant vs. Spatially varying
Deblurring Basics, Problem definition and variants Kinds of blur Hand-shake Defocus Credit: Kenneth Josephson Motion Credit: Kenneth Josephson Kinds of blur Spatially invariant vs. Spatially varying
Simulated Programmable Apertures with Lytro
 Simulated Programmable Apertures with Lytro Yangyang Yu Stanford University yyu10@stanford.edu Abstract This paper presents a simulation method using the commercial light field camera Lytro, which allows
Simulated Programmable Apertures with Lytro Yangyang Yu Stanford University yyu10@stanford.edu Abstract This paper presents a simulation method using the commercial light field camera Lytro, which allows
Deconvolution , , Computational Photography Fall 2017, Lecture 17
 Deconvolution http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 17 Course announcements Homework 4 is out. - Due October 26 th. - There was another
Deconvolution http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 17 Course announcements Homework 4 is out. - Due October 26 th. - There was another
A Review over Different Blur Detection Techniques in Image Processing
 A Review over Different Blur Detection Techniques in Image Processing 1 Anupama Sharma, 2 Devarshi Shukla 1 E.C.E student, 2 H.O.D, Department of electronics communication engineering, LR College of engineering
A Review over Different Blur Detection Techniques in Image Processing 1 Anupama Sharma, 2 Devarshi Shukla 1 E.C.E student, 2 H.O.D, Department of electronics communication engineering, LR College of engineering
Coded photography , , Computational Photography Fall 2018, Lecture 14
 Coded photography http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 14 Overview of today s lecture The coded photography paradigm. Dealing with
Coded photography http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 14 Overview of today s lecture The coded photography paradigm. Dealing with
Coded photography , , Computational Photography Fall 2017, Lecture 18
 Coded photography http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 18 Course announcements Homework 5 delayed for Tuesday. - You will need cameras
Coded photography http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 18 Course announcements Homework 5 delayed for Tuesday. - You will need cameras
Changyin Zhou. Ph.D, Computer Science, Columbia University Oct 2012
 Changyin Zhou Software Engineer at Google X Google Inc. 1600 Amphitheater Parkway, Mountain View, CA 94043 E-mail: changyin@google.com URL: http://www.changyin.org Office: (917) 209-9110 Mobile: (646)
Changyin Zhou Software Engineer at Google X Google Inc. 1600 Amphitheater Parkway, Mountain View, CA 94043 E-mail: changyin@google.com URL: http://www.changyin.org Office: (917) 209-9110 Mobile: (646)
Computational Cameras. Rahul Raguram COMP
 Computational Cameras Rahul Raguram COMP 790-090 What is a computational camera? Camera optics Camera sensor 3D scene Traditional camera Final image Modified optics Camera sensor Image Compute 3D scene
Computational Cameras Rahul Raguram COMP 790-090 What is a computational camera? Camera optics Camera sensor 3D scene Traditional camera Final image Modified optics Camera sensor Image Compute 3D scene
Coded Aperture Pairs for Depth from Defocus
 Coded Aperture Pairs for Depth from Defocus Changyin Zhou Columbia University New York City, U.S. changyin@cs.columbia.edu Stephen Lin Microsoft Research Asia Beijing, P.R. China stevelin@microsoft.com
Coded Aperture Pairs for Depth from Defocus Changyin Zhou Columbia University New York City, U.S. changyin@cs.columbia.edu Stephen Lin Microsoft Research Asia Beijing, P.R. China stevelin@microsoft.com
Deconvolution , , Computational Photography Fall 2018, Lecture 12
 Deconvolution http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 12 Course announcements Homework 3 is out. - Due October 12 th. - Any questions?
Deconvolution http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 12 Course announcements Homework 3 is out. - Due October 12 th. - Any questions?
Coding and Modulation in Cameras
 Coding and Modulation in Cameras Amit Agrawal June 2010 Mitsubishi Electric Research Labs (MERL) Cambridge, MA, USA Coded Computational Imaging Agrawal, Veeraraghavan, Narasimhan & Mohan Schedule Introduction
Coding and Modulation in Cameras Amit Agrawal June 2010 Mitsubishi Electric Research Labs (MERL) Cambridge, MA, USA Coded Computational Imaging Agrawal, Veeraraghavan, Narasimhan & Mohan Schedule Introduction
Computational Camera & Photography: Coded Imaging
 Computational Camera & Photography: Coded Imaging Camera Culture Ramesh Raskar MIT Media Lab http://cameraculture.media.mit.edu/ Image removed due to copyright restrictions. See Fig. 1, Eight major types
Computational Camera & Photography: Coded Imaging Camera Culture Ramesh Raskar MIT Media Lab http://cameraculture.media.mit.edu/ Image removed due to copyright restrictions. See Fig. 1, Eight major types
Defocus Map Estimation from a Single Image
 Defocus Map Estimation from a Single Image Shaojie Zhuo Terence Sim School of Computing, National University of Singapore, Computing 1, 13 Computing Drive, Singapore 117417, SINGAPOUR Abstract In this
Defocus Map Estimation from a Single Image Shaojie Zhuo Terence Sim School of Computing, National University of Singapore, Computing 1, 13 Computing Drive, Singapore 117417, SINGAPOUR Abstract In this
To Do. Advanced Computer Graphics. Outline. Computational Imaging. How do we see the world? Pinhole camera
 Advanced Computer Graphics CSE 163 [Spring 2017], Lecture 14 Ravi Ramamoorthi http://www.cs.ucsd.edu/~ravir To Do Assignment 2 due May 19 Any last minute issues or questions? Next two lectures: Imaging,
Advanced Computer Graphics CSE 163 [Spring 2017], Lecture 14 Ravi Ramamoorthi http://www.cs.ucsd.edu/~ravir To Do Assignment 2 due May 19 Any last minute issues or questions? Next two lectures: Imaging,
On the Recovery of Depth from a Single Defocused Image
 On the Recovery of Depth from a Single Defocused Image Shaojie Zhuo and Terence Sim School of Computing National University of Singapore Singapore,747 Abstract. In this paper we address the challenging
On the Recovery of Depth from a Single Defocused Image Shaojie Zhuo and Terence Sim School of Computing National University of Singapore Singapore,747 Abstract. In this paper we address the challenging
Computational Approaches to Cameras
 Computational Approaches to Cameras 11/16/17 Magritte, The False Mirror (1935) Computational Photography Derek Hoiem, University of Illinois Announcements Final project proposal due Monday (see links on
Computational Approaches to Cameras 11/16/17 Magritte, The False Mirror (1935) Computational Photography Derek Hoiem, University of Illinois Announcements Final project proposal due Monday (see links on
Coded Aperture and Coded Exposure Photography
 Coded Aperture and Coded Exposure Photography Martin Wilson University of Cape Town Cape Town, South Africa Email: Martin.Wilson@uct.ac.za Fred Nicolls University of Cape Town Cape Town, South Africa Email:
Coded Aperture and Coded Exposure Photography Martin Wilson University of Cape Town Cape Town, South Africa Email: Martin.Wilson@uct.ac.za Fred Nicolls University of Cape Town Cape Town, South Africa Email:
Extended depth of field for visual measurement systems with depth-invariant magnification
 Extended depth of field for visual measurement systems with depth-invariant magnification Yanyu Zhao a and Yufu Qu* a,b a School of Instrument Science and Opto-Electronic Engineering, Beijing University
Extended depth of field for visual measurement systems with depth-invariant magnification Yanyu Zhao a and Yufu Qu* a,b a School of Instrument Science and Opto-Electronic Engineering, Beijing University
Near-Invariant Blur for Depth and 2D Motion via Time-Varying Light Field Analysis
 Near-Invariant Blur for Depth and 2D Motion via Time-Varying Light Field Analysis Yosuke Bando 1,2 Henry Holtzman 2 Ramesh Raskar 2 1 Toshiba Corporation 2 MIT Media Lab Defocus & Motion Blur PSF Depth
Near-Invariant Blur for Depth and 2D Motion via Time-Varying Light Field Analysis Yosuke Bando 1,2 Henry Holtzman 2 Ramesh Raskar 2 1 Toshiba Corporation 2 MIT Media Lab Defocus & Motion Blur PSF Depth
When Does Computational Imaging Improve Performance?
 When Does Computational Imaging Improve Performance? Oliver Cossairt Assistant Professor Northwestern University Collaborators: Mohit Gupta, Changyin Zhou, Daniel Miau, Shree Nayar (Columbia University)
When Does Computational Imaging Improve Performance? Oliver Cossairt Assistant Professor Northwestern University Collaborators: Mohit Gupta, Changyin Zhou, Daniel Miau, Shree Nayar (Columbia University)
Motion-invariant Coding Using a Programmable Aperture Camera
 [DOI: 10.2197/ipsjtcva.6.25] Research Paper Motion-invariant Coding Using a Programmable Aperture Camera Toshiki Sonoda 1,a) Hajime Nagahara 1,b) Rin-ichiro Taniguchi 1,c) Received: October 22, 2013, Accepted:
[DOI: 10.2197/ipsjtcva.6.25] Research Paper Motion-invariant Coding Using a Programmable Aperture Camera Toshiki Sonoda 1,a) Hajime Nagahara 1,b) Rin-ichiro Taniguchi 1,c) Received: October 22, 2013, Accepted:
The ultimate camera. Computational Photography. Creating the ultimate camera. The ultimate camera. What does it do?
 Computational Photography The ultimate camera What does it do? Image from Durand & Freeman s MIT Course on Computational Photography Today s reading Szeliski Chapter 9 The ultimate camera Infinite resolution
Computational Photography The ultimate camera What does it do? Image from Durand & Freeman s MIT Course on Computational Photography Today s reading Szeliski Chapter 9 The ultimate camera Infinite resolution
multiframe visual-inertial blur estimation and removal for unmodified smartphones
 multiframe visual-inertial blur estimation and removal for unmodified smartphones, Severin Münger, Carlo Beltrame, Luc Humair WSCG 2015, Plzen, Czech Republic images taken by non-professional photographers
multiframe visual-inertial blur estimation and removal for unmodified smartphones, Severin Münger, Carlo Beltrame, Luc Humair WSCG 2015, Plzen, Czech Republic images taken by non-professional photographers
What are Good Apertures for Defocus Deblurring?
 What are Good Apertures for Defocus Deblurring? Changyin Zhou, Shree Nayar Abstract In recent years, with camera pixels shrinking in size, images are more likely to include defocused regions. In order
What are Good Apertures for Defocus Deblurring? Changyin Zhou, Shree Nayar Abstract In recent years, with camera pixels shrinking in size, images are more likely to include defocused regions. In order
Optimal Single Image Capture for Motion Deblurring
 Optimal Single Image Capture for Motion Deblurring Amit Agrawal Mitsubishi Electric Research Labs (MERL) 1 Broadway, Cambridge, MA, USA agrawal@merl.com Ramesh Raskar MIT Media Lab Ames St., Cambridge,
Optimal Single Image Capture for Motion Deblurring Amit Agrawal Mitsubishi Electric Research Labs (MERL) 1 Broadway, Cambridge, MA, USA agrawal@merl.com Ramesh Raskar MIT Media Lab Ames St., Cambridge,
Computational Photography Introduction
 Computational Photography Introduction Jongmin Baek CS 478 Lecture Jan 9, 2012 Background Sales of digital cameras surpassed sales of film cameras in 2004. Digital cameras are cool Free film Instant display
Computational Photography Introduction Jongmin Baek CS 478 Lecture Jan 9, 2012 Background Sales of digital cameras surpassed sales of film cameras in 2004. Digital cameras are cool Free film Instant display
Modeling and Synthesis of Aperture Effects in Cameras
 Modeling and Synthesis of Aperture Effects in Cameras Douglas Lanman, Ramesh Raskar, and Gabriel Taubin Computational Aesthetics 2008 20 June, 2008 1 Outline Introduction and Related Work Modeling Vignetting
Modeling and Synthesis of Aperture Effects in Cameras Douglas Lanman, Ramesh Raskar, and Gabriel Taubin Computational Aesthetics 2008 20 June, 2008 1 Outline Introduction and Related Work Modeling Vignetting
Recent Advances in Image Deblurring. Seungyong Lee (Collaboration w/ Sunghyun Cho)
") Recent Advances in Image Deblurring Seungyong Lee (Collaboration w/ Sunghyun Cho) Disclaimer Many images and figures in this course note have been copied from the papers and presentation materials of previous
Recent Advances in Image Deblurring Seungyong Lee (Collaboration w/ Sunghyun Cho) Disclaimer Many images and figures in this course note have been copied from the papers and presentation materials of previous
Improved motion invariant imaging with time varying shutter functions
 Improved motion invariant imaging with time varying shutter functions Steve Webster a and Andrew Dorrell b Canon Information Systems Research, Australia (CiSRA), Thomas Holt Drive, North Ryde, Australia
Improved motion invariant imaging with time varying shutter functions Steve Webster a and Andrew Dorrell b Canon Information Systems Research, Australia (CiSRA), Thomas Holt Drive, North Ryde, Australia
A Framework for Analysis of Computational Imaging Systems
 A Framework for Analysis of Computational Imaging Systems Kaushik Mitra, Oliver Cossairt, Ashok Veeraghavan Rice University Northwestern University Computational imaging CI systems that adds new functionality
A Framework for Analysis of Computational Imaging Systems Kaushik Mitra, Oliver Cossairt, Ashok Veeraghavan Rice University Northwestern University Computational imaging CI systems that adds new functionality
Design of Temporally Dithered Codes for Increased Depth of Field in Structured Light Systems
 Design of Temporally Dithered Codes for Increased Depth of Field in Structured Light Systems Ricardo R. Garcia University of California, Berkeley Berkeley, CA rrgarcia@eecs.berkeley.edu Abstract In recent
Design of Temporally Dithered Codes for Increased Depth of Field in Structured Light Systems Ricardo R. Garcia University of California, Berkeley Berkeley, CA rrgarcia@eecs.berkeley.edu Abstract In recent
Admin Deblurring & Deconvolution Different types of blur
 Admin Assignment 3 due Deblurring & Deconvolution Lecture 10 Last lecture Move to Friday? Projects Come and see me Different types of blur Camera shake User moving hands Scene motion Objects in the scene
Admin Assignment 3 due Deblurring & Deconvolution Lecture 10 Last lecture Move to Friday? Projects Come and see me Different types of blur Camera shake User moving hands Scene motion Objects in the scene
Analysis of Coded Apertures for Defocus Deblurring of HDR Images
 CEIG - Spanish Computer Graphics Conference (2012) Isabel Navazo and Gustavo Patow (Editors) Analysis of Coded Apertures for Defocus Deblurring of HDR Images Luis Garcia, Lara Presa, Diego Gutierrez and
CEIG - Spanish Computer Graphics Conference (2012) Isabel Navazo and Gustavo Patow (Editors) Analysis of Coded Apertures for Defocus Deblurring of HDR Images Luis Garcia, Lara Presa, Diego Gutierrez and
SUPER RESOLUTION INTRODUCTION
 SUPER RESOLUTION Jnanavardhini - Online MultiDisciplinary Research Journal Ms. Amalorpavam.G Assistant Professor, Department of Computer Sciences, Sambhram Academy of Management. Studies, Bangalore Abstract:-
SUPER RESOLUTION Jnanavardhini - Online MultiDisciplinary Research Journal Ms. Amalorpavam.G Assistant Professor, Department of Computer Sciences, Sambhram Academy of Management. Studies, Bangalore Abstract:-
Toward Non-stationary Blind Image Deblurring: Models and Techniques
 Toward Non-stationary Blind Image Deblurring: Models and Techniques Ji, Hui Department of Mathematics National University of Singapore NUS, 30-May-2017 Outline of the talk Non-stationary Image blurring
Toward Non-stationary Blind Image Deblurring: Models and Techniques Ji, Hui Department of Mathematics National University of Singapore NUS, 30-May-2017 Outline of the talk Non-stationary Image blurring
Selection of Temporally Dithered Codes for Increasing Virtual Depth of Field in Structured Light Systems
 Selection of Temporally Dithered Codes for Increasing Virtual Depth of Field in Structured Light Systems Abstract Temporally dithered codes have recently been used for depth reconstruction of fast dynamic
Selection of Temporally Dithered Codes for Increasing Virtual Depth of Field in Structured Light Systems Abstract Temporally dithered codes have recently been used for depth reconstruction of fast dynamic
Pattern Recognition 44 (2011) Contents lists available at ScienceDirect. Pattern Recognition. journal homepage:
 Contents lists available at ScienceDirect. Pattern Recognition. journal homepage:") Pattern Recognition 44 () 85 858 Contents lists available at ScienceDirect Pattern Recognition journal homepage: www.elsevier.com/locate/pr Defocus map estimation from a single image Shaojie Zhuo, Terence
Pattern Recognition 44 () 85 858 Contents lists available at ScienceDirect Pattern Recognition journal homepage: www.elsevier.com/locate/pr Defocus map estimation from a single image Shaojie Zhuo, Terence
Image Deblurring with Blurred/Noisy Image Pairs
 Image Deblurring with Blurred/Noisy Image Pairs Huichao Ma, Buping Wang, Jiabei Zheng, Menglian Zhou April 26, 2013 1 Abstract Photos taken under dim lighting conditions by a handheld camera are usually
Image Deblurring with Blurred/Noisy Image Pairs Huichao Ma, Buping Wang, Jiabei Zheng, Menglian Zhou April 26, 2013 1 Abstract Photos taken under dim lighting conditions by a handheld camera are usually
Restoration of Motion Blurred Document Images
 Restoration of Motion Blurred Document Images Bolan Su 12, Shijian Lu 2 and Tan Chew Lim 1 1 Department of Computer Science,School of Computing,National University of Singapore Computing 1, 13 Computing
Restoration of Motion Blurred Document Images Bolan Su 12, Shijian Lu 2 and Tan Chew Lim 1 1 Department of Computer Science,School of Computing,National University of Singapore Computing 1, 13 Computing
Time of Flight Capture
 Time of Flight Capture CS635 Spring 2017 Daniel G. Aliaga Department of Computer Science Purdue University Range Acquisition Taxonomy Range acquisition Contact Transmissive Mechanical (CMM, jointed arm)
Time of Flight Capture CS635 Spring 2017 Daniel G. Aliaga Department of Computer Science Purdue University Range Acquisition Taxonomy Range acquisition Contact Transmissive Mechanical (CMM, jointed arm)
Coded Exposure Deblurring: Optimized Codes for PSF Estimation and Invertibility
 Coded Exposure Deblurring: Optimized Codes for PSF Estimation and Invertibility Amit Agrawal Yi Xu Mitsubishi Electric Research Labs (MERL) 201 Broadway, Cambridge, MA, USA [agrawal@merl.com,xu43@cs.purdue.edu]
Coded Exposure Deblurring: Optimized Codes for PSF Estimation and Invertibility Amit Agrawal Yi Xu Mitsubishi Electric Research Labs (MERL) 201 Broadway, Cambridge, MA, USA [agrawal@merl.com,xu43@cs.purdue.edu]
Focal Sweep Videography with Deformable Optics
 Focal Sweep Videography with Deformable Optics Daniel Miau Columbia University dmiau@cs.columbia.edu Oliver Cossairt Northwestern University ollie@eecs.northwestern.edu Shree K. Nayar Columbia University
Focal Sweep Videography with Deformable Optics Daniel Miau Columbia University dmiau@cs.columbia.edu Oliver Cossairt Northwestern University ollie@eecs.northwestern.edu Shree K. Nayar Columbia University
Performance Evaluation of Different Depth From Defocus (DFD) Techniques
 Techniques") Please verify that () all pages are present, () all figures are acceptable, (3) all fonts and special characters are correct, and () all text and figures fit within the Performance Evaluation of Different
Please verify that () all pages are present, () all figures are acceptable, (3) all fonts and special characters are correct, and () all text and figures fit within the Performance Evaluation of Different
A Mathematical model for the determination of distance of an object in a 2D image
 A Mathematical model for the determination of distance of an object in a 2D image Deepu R 1, Murali S 2,Vikram Raju 3 Maharaja Institute of Technology Mysore, Karnataka, India rdeepusingh@mitmysore.in
A Mathematical model for the determination of distance of an object in a 2D image Deepu R 1, Murali S 2,Vikram Raju 3 Maharaja Institute of Technology Mysore, Karnataka, India rdeepusingh@mitmysore.in
Image Deblurring. This chapter describes how to deblur an image using the toolbox deblurring functions.
 12 Image Deblurring This chapter describes how to deblur an image using the toolbox deblurring functions. Understanding Deblurring (p. 12-2) Using the Deblurring Functions (p. 12-5) Avoiding Ringing in
12 Image Deblurring This chapter describes how to deblur an image using the toolbox deblurring functions. Understanding Deblurring (p. 12-2) Using the Deblurring Functions (p. 12-5) Avoiding Ringing in
Extended Depth of Field Catadioptric Imaging Using Focal Sweep
 Extended Depth of Field Catadioptric Imaging Using Focal Sweep Ryunosuke Yokoya Columbia University New York, NY 10027 yokoya@cs.columbia.edu Shree K. Nayar Columbia University New York, NY 10027 nayar@cs.columbia.edu
Extended Depth of Field Catadioptric Imaging Using Focal Sweep Ryunosuke Yokoya Columbia University New York, NY 10027 yokoya@cs.columbia.edu Shree K. Nayar Columbia University New York, NY 10027 nayar@cs.columbia.edu
Burst Photography! EE367/CS448I: Computational Imaging and Display! stanford.edu/class/ee367! Lecture 7! Gordon Wetzstein! Stanford University!
 Burst Photography! EE367/CS448I: Computational Imaging and Display! stanford.edu/class/ee367! Lecture 7! Gordon Wetzstein! Stanford University! Motivation! wikipedia! exposure sequence! -4 stops! Motivation!
Burst Photography! EE367/CS448I: Computational Imaging and Display! stanford.edu/class/ee367! Lecture 7! Gordon Wetzstein! Stanford University! Motivation! wikipedia! exposure sequence! -4 stops! Motivation!
A Novel Image Deblurring Method to Improve Iris Recognition Accuracy
 A Novel Image Deblurring Method to Improve Iris Recognition Accuracy Jing Liu University of Science and Technology of China National Laboratory of Pattern Recognition, Institute of Automation, Chinese
A Novel Image Deblurring Method to Improve Iris Recognition Accuracy Jing Liu University of Science and Technology of China National Laboratory of Pattern Recognition, Institute of Automation, Chinese
Defocus Blur Correcting Projector-Camera System
 Defocus Blur Correcting Projector-Camera System Yuji Oyamada and Hideo Saito Graduate School of Science and Technology, Keio University, 3-14-1 Hiyoshi Kohoku-ku, Yokohama 223-8522, Japan {charmie,saito}@ozawa.ics.keio.ac.jp
Defocus Blur Correcting Projector-Camera System Yuji Oyamada and Hideo Saito Graduate School of Science and Technology, Keio University, 3-14-1 Hiyoshi Kohoku-ku, Yokohama 223-8522, Japan {charmie,saito}@ozawa.ics.keio.ac.jp
To Denoise or Deblur: Parameter Optimization for Imaging Systems
 To Denoise or Deblur: Parameter Optimization for Imaging Systems Kaushik Mitra a, Oliver Cossairt b and Ashok Veeraraghavan a a Electrical and Computer Engineering, Rice University, Houston, TX 77005 b
To Denoise or Deblur: Parameter Optimization for Imaging Systems Kaushik Mitra a, Oliver Cossairt b and Ashok Veeraraghavan a a Electrical and Computer Engineering, Rice University, Houston, TX 77005 b
4 STUDY OF DEBLURRING TECHNIQUES FOR RESTORED MOTION BLURRED IMAGES
 4 STUDY OF DEBLURRING TECHNIQUES FOR RESTORED MOTION BLURRED IMAGES Abstract: This paper attempts to undertake the study of deblurring techniques for Restored Motion Blurred Images by using: Wiener filter,
4 STUDY OF DEBLURRING TECHNIQUES FOR RESTORED MOTION BLURRED IMAGES Abstract: This paper attempts to undertake the study of deblurring techniques for Restored Motion Blurred Images by using: Wiener filter,
Synthetic aperture photography and illumination using arrays of cameras and projectors
 Synthetic aperture photography and illumination using arrays of cameras and projectors technologies large camera arrays large projector arrays camera projector arrays Outline optical effects synthetic
Synthetic aperture photography and illumination using arrays of cameras and projectors technologies large camera arrays large projector arrays camera projector arrays Outline optical effects synthetic
Lecture 19: Depth Cameras. Kayvon Fatahalian CMU : Graphics and Imaging Architectures (Fall 2011)
") Lecture 19: Depth Cameras Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Continuing theme: computational photography Cheap cameras capture light, extensive processing produces
Lecture 19: Depth Cameras Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Continuing theme: computational photography Cheap cameras capture light, extensive processing produces
Edge Width Estimation for Defocus Map from a Single Image
 Edge Width Estimation for Defocus Map from a Single Image Andrey Nasonov, Aleandra Nasonova, and Andrey Krylov (B) Laboratory of Mathematical Methods of Image Processing, Faculty of Computational Mathematics
Edge Width Estimation for Defocus Map from a Single Image Andrey Nasonov, Aleandra Nasonova, and Andrey Krylov (B) Laboratory of Mathematical Methods of Image Processing, Faculty of Computational Mathematics
Coded Aperture Flow. Anita Sellent and Paolo Favaro
 Coded Aperture Flow Anita Sellent and Paolo Favaro Institut für Informatik und angewandte Mathematik, Universität Bern, Switzerland http://www.cvg.unibe.ch/ Abstract. Real cameras have a limited depth
Coded Aperture Flow Anita Sellent and Paolo Favaro Institut für Informatik und angewandte Mathematik, Universität Bern, Switzerland http://www.cvg.unibe.ch/ Abstract. Real cameras have a limited depth
Computational Photography: Principles and Practice
 Computational Photography: Principles and Practice HCI & Robotics (HCI 및로봇응용공학 ) Ig-Jae Kim, Korea Institute of Science and Technology ( 한국과학기술연구원김익재 ) Jaewon Kim, Korea Institute of Science and Technology
Computational Photography: Principles and Practice HCI & Robotics (HCI 및로봇응용공학 ) Ig-Jae Kim, Korea Institute of Science and Technology ( 한국과학기술연구원김익재 ) Jaewon Kim, Korea Institute of Science and Technology
Image and Depth from a Single Defocused Image Using Coded Aperture Photography
 Image and Depth from a Single Defocused Image Using Coded Aperture Photography Mina Masoudifar a, Hamid Reza Pourreza a a Department of Computer Engineering, Ferdowsi University of Mashhad, Mashhad, Iran
Image and Depth from a Single Defocused Image Using Coded Aperture Photography Mina Masoudifar a, Hamid Reza Pourreza a a Department of Computer Engineering, Ferdowsi University of Mashhad, Mashhad, Iran
Focused Image Recovery from Two Defocused
 Focused Image Recovery from Two Defocused Images Recorded With Different Camera Settings Murali Subbarao Tse-Chung Wei Gopal Surya Department of Electrical Engineering State University of New York Stony
Focused Image Recovery from Two Defocused Images Recorded With Different Camera Settings Murali Subbarao Tse-Chung Wei Gopal Surya Department of Electrical Engineering State University of New York Stony
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 22: Computational photography photomatix.com Announcements Final project midterm reports due on Tuesday to CMS by 11:59pm BRDF s can be incredibly complicated
CS6670: Computer Vision Noah Snavely Lecture 22: Computational photography photomatix.com Announcements Final project midterm reports due on Tuesday to CMS by 11:59pm BRDF s can be incredibly complicated
fast blur removal for wearable QR code scanners
 fast blur removal for wearable QR code scanners Gábor Sörös, Stephan Semmler, Luc Humair, Otmar Hilliges ISWC 2015, Osaka, Japan traditional barcode scanning next generation barcode scanning ubiquitous
fast blur removal for wearable QR code scanners Gábor Sörös, Stephan Semmler, Luc Humair, Otmar Hilliges ISWC 2015, Osaka, Japan traditional barcode scanning next generation barcode scanning ubiquitous
A Recognition of License Plate Images from Fast Moving Vehicles Using Blur Kernel Estimation
 A Recognition of License Plate Images from Fast Moving Vehicles Using Blur Kernel Estimation Kalaivani.R 1, Poovendran.R 2 P.G. Student, Dept. of ECE, Adhiyamaan College of Engineering, Hosur, Tamil Nadu,
A Recognition of License Plate Images from Fast Moving Vehicles Using Blur Kernel Estimation Kalaivani.R 1, Poovendran.R 2 P.G. Student, Dept. of ECE, Adhiyamaan College of Engineering, Hosur, Tamil Nadu,
NTU CSIE. Advisor: Wu Ja Ling, Ph.D.
 An Interactive Background Blurring Mechanism and Its Applications NTU CSIE Yan Chih Yu Advisor: Wu Ja Ling, Ph.D. 1 2 Outline Introduction Related Work Method Object Segmentation Depth Map Generation Image
An Interactive Background Blurring Mechanism and Its Applications NTU CSIE Yan Chih Yu Advisor: Wu Ja Ling, Ph.D. 1 2 Outline Introduction Related Work Method Object Segmentation Depth Map Generation Image
Cameras. Steve Rotenberg CSE168: Rendering Algorithms UCSD, Spring 2017
 Cameras Steve Rotenberg CSE168: Rendering Algorithms UCSD, Spring 2017 Camera Focus Camera Focus So far, we have been simulating pinhole cameras with perfect focus Often times, we want to simulate more
Cameras Steve Rotenberg CSE168: Rendering Algorithms UCSD, Spring 2017 Camera Focus Camera Focus So far, we have been simulating pinhole cameras with perfect focus Often times, we want to simulate more
Explanation of Aberration and Wavefront
 Explanation of Aberration and Wavefront 1. What Causes Blur? 2. What is? 4. What is wavefront? 5. Hartmann-Shack Aberrometer 6. Adoption of wavefront technology David Oh 1. What Causes Blur? 2. What is?
Explanation of Aberration and Wavefront 1. What Causes Blur? 2. What is? 4. What is wavefront? 5. Hartmann-Shack Aberrometer 6. Adoption of wavefront technology David Oh 1. What Causes Blur? 2. What is?
Image Deblurring and Noise Reduction in Python TJHSST Senior Research Project Computer Systems Lab
 Image Deblurring and Noise Reduction in Python TJHSST Senior Research Project Computer Systems Lab 2009-2010 Vincent DeVito June 16, 2010 Abstract In the world of photography and machine vision, blurry
Image Deblurring and Noise Reduction in Python TJHSST Senior Research Project Computer Systems Lab 2009-2010 Vincent DeVito June 16, 2010 Abstract In the world of photography and machine vision, blurry
La photographie numérique. Frank NIELSEN Lundi 7 Juin 2010
 La photographie numérique Frank NIELSEN Lundi 7 Juin 2010 1 Le Monde digital Key benefits of the analog2digital paradigm shift? Dissociate contents from support : binarize Universal player (CPU, Turing
La photographie numérique Frank NIELSEN Lundi 7 Juin 2010 1 Le Monde digital Key benefits of the analog2digital paradigm shift? Dissociate contents from support : binarize Universal player (CPU, Turing
Extended depth-of-field in Integral Imaging by depth-dependent deconvolution
 Extended depth-of-field in Integral Imaging by depth-dependent deconvolution H. Navarro* 1, G. Saavedra 1, M. Martinez-Corral 1, M. Sjöström 2, R. Olsson 2, 1 Dept. of Optics, Univ. of Valencia, E-46100,
Extended depth-of-field in Integral Imaging by depth-dependent deconvolution H. Navarro* 1, G. Saavedra 1, M. Martinez-Corral 1, M. Sjöström 2, R. Olsson 2, 1 Dept. of Optics, Univ. of Valencia, E-46100,
6.A44 Computational Photography
 Add date: Friday 6.A44 Computational Photography Depth of Field Frédo Durand We allow for some tolerance What happens when we close the aperture by two stop? Aperture diameter is divided by two is doubled
Add date: Friday 6.A44 Computational Photography Depth of Field Frédo Durand We allow for some tolerance What happens when we close the aperture by two stop? Aperture diameter is divided by two is doubled
Resolving Objects at Higher Resolution from a Single Motion-blurred Image
 MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Resolving Objects at Higher Resolution from a Single Motion-blurred Image Amit Agrawal, Ramesh Raskar TR2007-036 July 2007 Abstract Motion
MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Resolving Objects at Higher Resolution from a Single Motion-blurred Image Amit Agrawal, Ramesh Raskar TR2007-036 July 2007 Abstract Motion
Removing Temporal Stationary Blur in Route Panoramas
 Removing Temporal Stationary Blur in Route Panoramas Jiang Yu Zheng and Min Shi Indiana University Purdue University Indianapolis jzheng@cs.iupui.edu Abstract The Route Panorama is a continuous, compact
Removing Temporal Stationary Blur in Route Panoramas Jiang Yu Zheng and Min Shi Indiana University Purdue University Indianapolis jzheng@cs.iupui.edu Abstract The Route Panorama is a continuous, compact
Computational Photography
 Computational photography Computational Photography Digital Visual Effects Yung-Yu Chuang wikipedia: Computational photography h refers broadly to computational imaging techniques that enhance or extend
Computational photography Computational Photography Digital Visual Effects Yung-Yu Chuang wikipedia: Computational photography h refers broadly to computational imaging techniques that enhance or extend
Single Digital Image Multi-focusing Using Point to Point Blur Model Based Depth Estimation
 Single Digital mage Multi-focusing Using Point to Point Blur Model Based Depth Estimation Praveen S S, Aparna P R Abstract The proposed paper focuses on Multi-focusing, a technique that restores all-focused
Single Digital mage Multi-focusing Using Point to Point Blur Model Based Depth Estimation Praveen S S, Aparna P R Abstract The proposed paper focuses on Multi-focusing, a technique that restores all-focused
Perceptually-Optimized Coded Apertures for Defocus Deblurring
 Volume 0 (1981), Number 0 pp. 1 12 COMPUTER GRAPHICS forum Perceptually-Optimized Coded Apertures for Defocus Deblurring Belen Masia, Lara Presa, Adrian Corrales and Diego Gutierrez Universidad de Zaragoza,
Volume 0 (1981), Number 0 pp. 1 12 COMPUTER GRAPHICS forum Perceptually-Optimized Coded Apertures for Defocus Deblurring Belen Masia, Lara Presa, Adrian Corrales and Diego Gutierrez Universidad de Zaragoza,
SURVEILLANCE SYSTEMS WITH AUTOMATIC RESTORATION OF LINEAR MOTION AND OUT-OF-FOCUS BLURRED IMAGES. Received August 2008; accepted October 2008
 ICIC Express Letters ICIC International c 2008 ISSN 1881-803X Volume 2, Number 4, December 2008 pp. 409 414 SURVEILLANCE SYSTEMS WITH AUTOMATIC RESTORATION OF LINEAR MOTION AND OUT-OF-FOCUS BLURRED IMAGES
ICIC Express Letters ICIC International c 2008 ISSN 1881-803X Volume 2, Number 4, December 2008 pp. 409 414 SURVEILLANCE SYSTEMS WITH AUTOMATIC RESTORATION OF LINEAR MOTION AND OUT-OF-FOCUS BLURRED IMAGES
Today. Defocus. Deconvolution / inverse filters. MIT 2.71/2.710 Optics 12/12/05 wk15-a-1
 Today Defocus Deconvolution / inverse filters MIT.7/.70 Optics //05 wk5-a- MIT.7/.70 Optics //05 wk5-a- Defocus MIT.7/.70 Optics //05 wk5-a-3 0 th Century Fox Focus in classical imaging in-focus defocus
Today Defocus Deconvolution / inverse filters MIT.7/.70 Optics //05 wk5-a- MIT.7/.70 Optics //05 wk5-a- Defocus MIT.7/.70 Optics //05 wk5-a-3 0 th Century Fox Focus in classical imaging in-focus defocus
DOING PHYSICS WITH MATLAB COMPUTATIONAL OPTICS. GUI Simulation Diffraction: Focused Beams and Resolution for a lens system
 DOING PHYSICS WITH MATLAB COMPUTATIONAL OPTICS GUI Simulation Diffraction: Focused Beams and Resolution for a lens system Ian Cooper School of Physics University of Sydney ian.cooper@sydney.edu.au DOWNLOAD
DOING PHYSICS WITH MATLAB COMPUTATIONAL OPTICS GUI Simulation Diffraction: Focused Beams and Resolution for a lens system Ian Cooper School of Physics University of Sydney ian.cooper@sydney.edu.au DOWNLOAD
Transfer Efficiency and Depth Invariance in Computational Cameras
 Transfer Efficiency and Depth Invariance in Computational Cameras Jongmin Baek Stanford University IEEE International Conference on Computational Photography 2010 Jongmin Baek (Stanford University) Transfer
Transfer Efficiency and Depth Invariance in Computational Cameras Jongmin Baek Stanford University IEEE International Conference on Computational Photography 2010 Jongmin Baek (Stanford University) Transfer
Point Spread Function Engineering for Scene Recovery. Changyin Zhou
 Point Spread Function Engineering for Scene Recovery Changyin Zhou Submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy in the Graduate School of Arts and Sciences
Point Spread Function Engineering for Scene Recovery Changyin Zhou Submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy in the Graduate School of Arts and Sciences
Computer Vision. The Pinhole Camera Model
 Computer Vision The Pinhole Camera Model Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2017/2018 Imaging device
Computer Vision The Pinhole Camera Model Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2017/2018 Imaging device
ECEN 4606, UNDERGRADUATE OPTICS LAB
 ECEN 4606, UNDERGRADUATE OPTICS LAB Lab 2: Imaging 1 the Telescope Original Version: Prof. McLeod SUMMARY: In this lab you will become familiar with the use of one or more lenses to create images of distant
ECEN 4606, UNDERGRADUATE OPTICS LAB Lab 2: Imaging 1 the Telescope Original Version: Prof. McLeod SUMMARY: In this lab you will become familiar with the use of one or more lenses to create images of distant
Blind Single-Image Super Resolution Reconstruction with Defocus Blur
 Sensors & Transducers 2014 by IFSA Publishing, S. L. http://www.sensorsportal.com Blind Single-Image Super Resolution Reconstruction with Defocus Blur Fengqing Qin, Lihong Zhu, Lilan Cao, Wanan Yang Institute
Sensors & Transducers 2014 by IFSA Publishing, S. L. http://www.sensorsportal.com Blind Single-Image Super Resolution Reconstruction with Defocus Blur Fengqing Qin, Lihong Zhu, Lilan Cao, Wanan Yang Institute
What the spider s eyes don t tell the spider s brain
 What the spider s eyes don t tell the spider s brain Depth Perception from Image Defocus in a Jumping Spider (*) Depth Perception from Image Defocus in a Jumping Spider Nagata, Koyanagi, Tsukamoto, Saeki,
What the spider s eyes don t tell the spider s brain Depth Perception from Image Defocus in a Jumping Spider (*) Depth Perception from Image Defocus in a Jumping Spider Nagata, Koyanagi, Tsukamoto, Saeki,
Modeling the calibration pipeline of the Lytro camera for high quality light-field image reconstruction
 2013 IEEE International Conference on Computer Vision Modeling the calibration pipeline of the Lytro camera for high quality light-field image reconstruction Donghyeon Cho Minhaeng Lee Sunyeong Kim Yu-Wing
2013 IEEE International Conference on Computer Vision Modeling the calibration pipeline of the Lytro camera for high quality light-field image reconstruction Donghyeon Cho Minhaeng Lee Sunyeong Kim Yu-Wing
Midterm Examination CS 534: Computational Photography
 Midterm Examination CS 534: Computational Photography November 3, 2015 NAME: SOLUTIONS Problem Score Max Score 1 8 2 8 3 9 4 4 5 3 6 4 7 6 8 13 9 7 10 4 11 7 12 10 13 9 14 8 Total 100 1 1. [8] What are
Midterm Examination CS 534: Computational Photography November 3, 2015 NAME: SOLUTIONS Problem Score Max Score 1 8 2 8 3 9 4 4 5 3 6 4 7 6 8 13 9 7 10 4 11 7 12 10 13 9 14 8 Total 100 1 1. [8] What are
Computational Challenges for Long Range Imaging
 1 Computational Challenges for Long Range Imaging Mark Bray 5 th September 2017 2 Overview How to identify a person at 10km range? Challenges Customer requirements Physics Environment System Mitigation
1 Computational Challenges for Long Range Imaging Mark Bray 5 th September 2017 2 Overview How to identify a person at 10km range? Challenges Customer requirements Physics Environment System Mitigation
Depth Estimation Algorithm for Color Coded Aperture Camera
 Depth Estimation Algorithm for Color Coded Aperture Camera Ivan Panchenko, Vladimir Paramonov and Victor Bucha; Samsung R&D Institute Russia; Moscow, Russia Abstract In this paper we present an algorithm
Depth Estimation Algorithm for Color Coded Aperture Camera Ivan Panchenko, Vladimir Paramonov and Victor Bucha; Samsung R&D Institute Russia; Moscow, Russia Abstract In this paper we present an algorithm
The Camera : Computational Photography Alexei Efros, CMU, Fall 2005
 The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
Implementation of Image Deblurring Techniques in Java
 Implementation of Image Deblurring Techniques in Java Peter Chapman Computer Systems Lab 2007-2008 Thomas Jefferson High School for Science and Technology Alexandria, Virginia January 22, 2008 Abstract
Implementation of Image Deblurring Techniques in Java Peter Chapman Computer Systems Lab 2007-2008 Thomas Jefferson High School for Science and Technology Alexandria, Virginia January 22, 2008 Abstract
Lenses, exposure, and (de)focus
focus") Lenses, exposure, and (de)focus http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 15 Course announcements Homework 4 is out. - Due October 26
Lenses, exposure, and (de)focus http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 15 Course announcements Homework 4 is out. - Due October 26
A No Reference Image Blur Detection using CPBD Metric and Deblurring of Gaussian Blurred Images using Lucy-Richardson Algorithm
 A No Reference Image Blur Detection using CPBD Metric and Deblurring of Gaussian Blurred Images using Lucy-Richardson Algorithm Suresh S. Zadage, G. U. Kharat Abstract This paper addresses sharpness of
A No Reference Image Blur Detection using CPBD Metric and Deblurring of Gaussian Blurred Images using Lucy-Richardson Algorithm Suresh S. Zadage, G. U. Kharat Abstract This paper addresses sharpness of
Motion Deblurring using Coded Exposure for a Wheeled Mobile Robot Kibaek Park, Seunghak Shin, Hae-Gon Jeon, Joon-Young Lee and In So Kweon
 Motion Deblurring using Coded Exposure for a Wheeled Mobile Robot Kibaek Park, Seunghak Shin, Hae-Gon Jeon, Joon-Young Lee and In So Kweon Korea Advanced Institute of Science and Technology, Daejeon 373-1,
Motion Deblurring using Coded Exposure for a Wheeled Mobile Robot Kibaek Park, Seunghak Shin, Hae-Gon Jeon, Joon-Young Lee and In So Kweon Korea Advanced Institute of Science and Technology, Daejeon 373-1,
2D Barcode Localization and Motion Deblurring Using a Flutter Shutter Camera
 2D Barcode Localization and Motion Deblurring Using a Flutter Shutter Camera Wei Xu University of Colorado at Boulder Boulder, CO, USA Wei.Xu@colorado.edu Scott McCloskey Honeywell Labs Minneapolis, MN,
2D Barcode Localization and Motion Deblurring Using a Flutter Shutter Camera Wei Xu University of Colorado at Boulder Boulder, CO, USA Wei.Xu@colorado.edu Scott McCloskey Honeywell Labs Minneapolis, MN,
International Journal of Advancedd Research in Biology, Ecology, Science and Technology (IJARBEST)
") Gaussian Blur Removal in Digital Images A.Elakkiya 1, S.V.Ramyaa 2 PG Scholars, M.E. VLSI Design, SSN College of Engineering, Rajiv Gandhi Salai, Kalavakkam 1,2 Abstract In many imaging systems, the observed
Gaussian Blur Removal in Digital Images A.Elakkiya 1, S.V.Ramyaa 2 PG Scholars, M.E. VLSI Design, SSN College of Engineering, Rajiv Gandhi Salai, Kalavakkam 1,2 Abstract In many imaging systems, the observed
Capturing Light. The Light Field. Grayscale Snapshot 12/1/16. P(q, f)
") Capturing Light Rooms by the Sea, Edward Hopper, 1951 The Penitent Magdalen, Georges de La Tour, c. 1640 Some slides from M. Agrawala, F. Durand, P. Debevec, A. Efros, R. Fergus, D. Forsyth, M. Levoy,
Capturing Light Rooms by the Sea, Edward Hopper, 1951 The Penitent Magdalen, Georges de La Tour, c. 1640 Some slides from M. Agrawala, F. Durand, P. Debevec, A. Efros, R. Fergus, D. Forsyth, M. Levoy,
DEPTH FUSED FROM INTENSITY RANGE AND BLUR ESTIMATION FOR LIGHT-FIELD CAMERAS. Yatong Xu, Xin Jin and Qionghai Dai
 DEPTH FUSED FROM INTENSITY RANGE AND BLUR ESTIMATION FOR LIGHT-FIELD CAMERAS Yatong Xu, Xin Jin and Qionghai Dai Shenhen Key Lab of Broadband Network and Multimedia, Graduate School at Shenhen, Tsinghua
DEPTH FUSED FROM INTENSITY RANGE AND BLUR ESTIMATION FOR LIGHT-FIELD CAMERAS Yatong Xu, Xin Jin and Qionghai Dai Shenhen Key Lab of Broadband Network and Multimedia, Graduate School at Shenhen, Tsinghua