Dave Wilson Director of Academic Programs National Instruments
|
|
|
- Abner Walsh
- 5 years ago
- Views:
Transcription



1 Dave Wilson Director of Academic Programs National Instruments Steps in the Technology Design Process Dave Wilson Director of Academic, Training and Certification Programs National Instruments Corporation 1 Engineering Grand Challenges Systems are Everywhere Advance health informatics Engineer the tools of scientific discovery Reverse-engineer the brain Provide energy from fusion Engineer better medicines Provide access to clean water Enhance virtual reality Restore and improve urban infrastructure Tesla Motors Red Bull Stratos Space X Develop carbon sequestration methods Advance personalized learning Make solar energy economical Prevent nuclear terror Secure cyberspace 4 Manage the nitrogen cycle Insulin Pump Elevators Smartphone 5 1


2 The ensemble is the function Theorize Visualize CAD Programming I/O EDA Dr. Alberto Sangiovani Vincentelli University of California at Berkeley Manufacturing 6 Learn the Theory Theory is Important P Wave Power Output S Wave Transformer PID 8 9 2


3 Using PID Math the shape maker Y = abs( G*(A*x^4+B*x^3-C*x^2) Y = X^ Training a biological neural network High emotion reinforces neural connections Knowledge Fast Avg Knowledge Slow Net Knowledge Gain Net Knowledge Gain Cycle 1 Rest Cycle 2 Rest Cycle 1 Rest Cycle 2 Rest Olin College 7/22/11 Dr. David Barrett Olin College 7/22/11 Dr. David Barrett 3



4 Visualize the Theory



5 19 20 Controls, Mechatronics, and Robotics Do Engineering: On One Platform from Concept to Proof Mechanical Prototyping ni.com/academic/controls 21 Meghan Kerry Product Marketing Manager 5




6




7



8 31 32 Replicate 8





9




10



11 Electronic Prototyping 47 H Bridge TIP120 LED Cap Cap Zener Diode Resistor




12


13 Production 55 13




14




15


16 70 71 Programming 72 16






17 System Design Elements of Engineering Systems ADE Graphical Measurement and Control I/O Deployable Math and Analysis User Interface CAD EDA 74 Deployable Targets Technology Integration 75 Models of Computation Compatible Elements Easily Combined Measurement and Control I/O Deployable Math and Analysis User Interface Technology Integration 76 Models of Computation 77 17




18



19 82 83 Applications 84 19


20 CERN: MedAustron Application Notes Particle accelerator used for cancer therapy without damaging healthy tissue Wide energy range from 60 MeV to 800 MeV per nucleon with selectable beam energy in steps of 0.1 MeV 300,000 settings for the beam based on particle type, ion source, beam line, energy level, beam dimension, and spill length Concurrent beam control and reconfiguration in less than 250 msec Reconfigure the software on the FPGA for the next cycle while current beam is generated Distributed control system synchronously generates magnetic fields for 300 magnets by generating waveforms for power converters in real time at 2 khz Power converter synchronization at the microsecond level to generate/control the beam Power converters distributed over 800 m2 in access controlled area 500 beam cycles with different beam energies for a single medical irradiation session of about 2 minutes duration More than 20,000 shared variables for control, configuration, and monitoring Solution completed in time because the researchers did not need to learn VHDL Optical Coherence Tomography




21 90 91 Heart Assist



22 Freezing an Atom Wave Motion Cancellation







23 98 99 Mechatronics and Robotics Today UC Boulder Autonomous Underwater Vehicle Virginia Tech Rotary Inverted Pendulum Virginia Tech Adult sized humanoid robot Case Western Autonomous lawn mower MIT Surface inspecting pendulum robot UC Berkeley Canfield Joint 10 0 UC San Diego Multi-modal treaded 10 rover 1 23


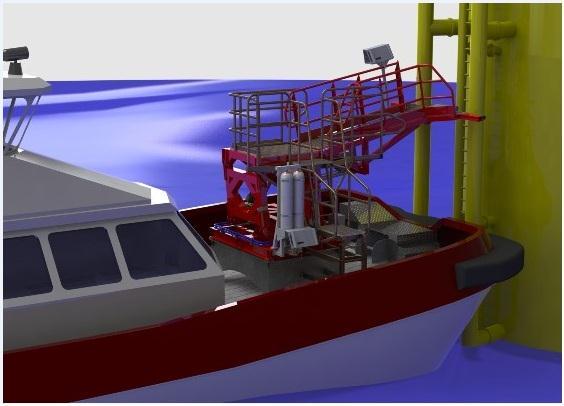
24 You have unprecedented access to the Title Author Challenge Solution Controlling a Hydraulic Motion Compensated Gangway to Access Offshore Wind Turbines Andrew Clegg - Industrial Systems & Control LTD, UK Creating a system to safely transfer personnel & equipment to offshore wind turbines in rolling seas & bad weather Using LabVIEW & crio to develop a movable gangway with an algorithm using boat motions to provide required hydraulic cylinder lengths to maintain position wind turbines located further offshore, sea conditions become adverse transferring personnel to sea based wind turbines for maintenance moveable gangway mounted on hydraulically actuated base on boat front up & down pitch cylinder, forward & back surge cylinder, port/starboard roll cylinder compensate for boat motions in roll, pitch, heave Used LVRT, FPGA & MathScript RT modules did dynamic simulations to test control strat & hydraulic specs to meet perf targets sw emulator to test algorithm functionality switched to real system to explore control loop performance for different loads, size, speed of motions, orientations I/O & control algorithm on crio Motion Reference Unit measures vessel motion, transmits positions & angles via serial link to MPU use mathscript nodes in LV for complex algorithms Inverse kinematics transforms motion plan into joint actuator trajectories calculate cylinder lengths & maintain gangway tip fixed in space real time cascade control with feedforward & nonlinear compensation Theory Tools Materials Systems Instrumentation To cylinder length error for simulation & real testing showed simulation was reasonable rep of final system development, implementation & factory testing took a little more than a year sea trials confirm that range of motion compensation meets expectations from final factory testing Do Engineering


25
Economics and the Social Sciences in the Grand Challenges
 Economics and the Social Sciences in the Grand Challenges John Birge, Chicago Cindy Barnhart, MIT CB/JB INFORMS, Oct 2013 1 Themes Progress on the Grand Challenges requires supporting economic, political,
Economics and the Social Sciences in the Grand Challenges John Birge, Chicago Cindy Barnhart, MIT CB/JB INFORMS, Oct 2013 1 Themes Progress on the Grand Challenges requires supporting economic, political,
Tricia Berry UT Austin Women in Engineering Program Texas Girls Collaborative Project txgcp.org
 PAPER TOWER ENGINEERING A HANDS-ON INTRODUCTION TO THE GRAND CHALLENGES OF ENGINEERING IN THE 21ST CENTURY Tricia Berry UT Austin Women in Engineering Program Texas Girls Collaborative Project Overview
PAPER TOWER ENGINEERING A HANDS-ON INTRODUCTION TO THE GRAND CHALLENGES OF ENGINEERING IN THE 21ST CENTURY Tricia Berry UT Austin Women in Engineering Program Texas Girls Collaborative Project Overview
The Grand Challenges for Engineering
 To: The Grand Challenges for Engineering 1. National Academy of Engineering - what is it? - what does it do? 2. Grand Challenges for Engineering - where did they come from and why? 3. Grand Challenges
To: The Grand Challenges for Engineering 1. National Academy of Engineering - what is it? - what does it do? 2. Grand Challenges for Engineering - where did they come from and why? 3. Grand Challenges
Engineering in the Era of Convergence. The 4th Industrial Revolution: Convergence of physical, chemical, biological, behavioral and social phenomena
 Engineering in the Era of Convergence The 4th Industrial Revolution: Convergence of physical, chemical, biological, behavioral and social phenomena Convergence is an intrinsic part of technology TECHNOLOGY:
Engineering in the Era of Convergence The 4th Industrial Revolution: Convergence of physical, chemical, biological, behavioral and social phenomena Convergence is an intrinsic part of technology TECHNOLOGY:
The Grand Challenges for Engineering & The Grand Challenges Scholars Program
 The Grand Challenges for Engineering & The Grand Challenges Scholars Program -Preparing Students for the 21 st Century GCSP Workshop/Meeting Bangalore, India December 14 th 2017 Programs Ensuring Engineering
The Grand Challenges for Engineering & The Grand Challenges Scholars Program -Preparing Students for the 21 st Century GCSP Workshop/Meeting Bangalore, India December 14 th 2017 Programs Ensuring Engineering
NSDL/NSTA Web Seminar Teach Engineering: Because Dreams Need Doing
 LIVE INTERACTIVE LEARNING @ YOUR DESKTOP NSDL/NSTA Web Seminar Teach Engineering: Because Dreams Need Doing Thursday, February 19, 2009 Who's presenting today Mindy Zarske K-12 Engineering Coordinator
LIVE INTERACTIVE LEARNING @ YOUR DESKTOP NSDL/NSTA Web Seminar Teach Engineering: Because Dreams Need Doing Thursday, February 19, 2009 Who's presenting today Mindy Zarske K-12 Engineering Coordinator
Tricia Berry Director, UT Austin Women in Engineering Program Director, Texas Girls Collaborative Project txgcp.org
 EXCITE KIDS THROUGH EFFECTIVE SCIENCE, TECHNOLOGY, ENGINEERING & MATH MESSAGING Tricia Berry Director, UT Austin Women in Engineering Program Director, Texas Girls Collaborative Project Overview Changing
EXCITE KIDS THROUGH EFFECTIVE SCIENCE, TECHNOLOGY, ENGINEERING & MATH MESSAGING Tricia Berry Director, UT Austin Women in Engineering Program Director, Texas Girls Collaborative Project Overview Changing
PRODUCTS AND LAB SOLUTIONS
 PRODUCTS AND LAB SOLUTIONS ENGINEERING FUNDAMENTALS NI ELVIS APPLICATION BOARDS Controls Board Energy Systems Board Mechatronic Systems Board with NI ELVIS III Mechatronic Sensors Board Mechatronic Actuators
PRODUCTS AND LAB SOLUTIONS ENGINEERING FUNDAMENTALS NI ELVIS APPLICATION BOARDS Controls Board Energy Systems Board Mechatronic Systems Board with NI ELVIS III Mechatronic Sensors Board Mechatronic Actuators
NSDL/NSTA Web Seminar Teach Engineering: Because Dreams Need Doing
 LIVE INTERACTIVE LEARNING @ YOUR DESKTOP NSDL/NSTA Web Seminar Teach Engineering: Because Dreams Need Doing Thursday, February19, 2009 6:30 p.m. to 8:00 p.m. Eastern time Agenda: 1. Introductions 2. Tech-help
LIVE INTERACTIVE LEARNING @ YOUR DESKTOP NSDL/NSTA Web Seminar Teach Engineering: Because Dreams Need Doing Thursday, February19, 2009 6:30 p.m. to 8:00 p.m. Eastern time Agenda: 1. Introductions 2. Tech-help
4/23/16. Virtual Reality. Virtual reality. Virtual reality is a hot topic today. Virtual reality
 CSCI 420 Computer Graphics Lecture 25 Virtual Reality Virtual reality computer-simulated environments that can simulate physical presence in places in the real world, as well as in imaginary worlds History
CSCI 420 Computer Graphics Lecture 25 Virtual Reality Virtual reality computer-simulated environments that can simulate physical presence in places in the real world, as well as in imaginary worlds History
DC motor control using arduino
 DC motor control using arduino 1) Introduction: First we need to differentiate between DC motor and DC generator and where we can use it in this experiment. What is the main different between the DC-motor,
DC motor control using arduino 1) Introduction: First we need to differentiate between DC motor and DC generator and where we can use it in this experiment. What is the main different between the DC-motor,
Computer Science. Things you should be doing. Readings for Today. What it is, What it's not, and How it is changing the world
 Computer Science What it is, What it's not, and How it is changing the world Notes for CSC 100 - The Beauty and Joy of Computing The University of North Carolina at Greensboro Things you should be doing
Computer Science What it is, What it's not, and How it is changing the world Notes for CSC 100 - The Beauty and Joy of Computing The University of North Carolina at Greensboro Things you should be doing
Quanser Products and solutions
 Quanser Products and solutions with NI LabVIEW From Classic Control to Complex Mechatronic Systems Design www.quanser.com Your first choice for control systems experiments For twenty five years, institutions
Quanser Products and solutions with NI LabVIEW From Classic Control to Complex Mechatronic Systems Design www.quanser.com Your first choice for control systems experiments For twenty five years, institutions
Bringing Wireless Communications Classes into the Modern Day
 1 Bringing Wireless Communications Classes into the Modern Day Engaging students by using real world hardware. Michel Nassar Academic Field Sales Engineer National Instruments Systems are Everywhere Tesla
1 Bringing Wireless Communications Classes into the Modern Day Engaging students by using real world hardware. Michel Nassar Academic Field Sales Engineer National Instruments Systems are Everywhere Tesla
by Jeffrey Fong, NIST, May 15, 2009
 ( Ethics ) by Jeffrey Fong, NIST, May 15, 2009 Slide # 01 What is NIST and what do I do at NIST? What is engineering? What is exciting about engineering? What is the downside of engineering? What is the
( Ethics ) by Jeffrey Fong, NIST, May 15, 2009 Slide # 01 What is NIST and what do I do at NIST? What is engineering? What is exciting about engineering? What is the downside of engineering? What is the
Start, Tumble and Succeed
 Start, Tumble and Succeed!"#$%&'%()"& & *+,#-.#-+-"#/)0.&12#&!30-+4/,/&%+5&*+(0+--#/& " AB6C7"6.2/1-/" 8'.3)"9:"D"
Start, Tumble and Succeed!"#$%&'%()"& & *+,#-.#-+-"#/)0.&12#&!30-+4/,/&%+5&*+(0+--#/& " AB6C7"6.2/1-/" 8'.3)"9:"D"
NAE Grand Challenges
 NAE Grand Challenges Dr. Louis A. Martin-Vega Dean of Engineering North Carolina State University GCSP Annual Meeting Washington,DC November 28, 2017 Top 20 Achievements of the 20th Century National Academy
NAE Grand Challenges Dr. Louis A. Martin-Vega Dean of Engineering North Carolina State University GCSP Annual Meeting Washington,DC November 28, 2017 Top 20 Achievements of the 20th Century National Academy
Start, Tumble and Succeed
 Start, Tumble and Succeed Surya Raghu Entrepreneurship for Scien4sts and Engineers ICTP- SAIFR- Brazil October 17-21, 2016 1 Outline Getting Started Major decisions to be made Consequences of your decisions
Start, Tumble and Succeed Surya Raghu Entrepreneurship for Scien4sts and Engineers ICTP- SAIFR- Brazil October 17-21, 2016 1 Outline Getting Started Major decisions to be made Consequences of your decisions
The Role of Engineering Education in Solving Global Society Problems: A World Systems Approach
 The Role of Engineering Education in Solving Global Society Problems: A World Systems Approach Professor Adedeji B. Badiru Dean, Graduate School of Engineering & Management U. S. Air Force Institute of
The Role of Engineering Education in Solving Global Society Problems: A World Systems Approach Professor Adedeji B. Badiru Dean, Graduate School of Engineering & Management U. S. Air Force Institute of
National Instruments Accelerating Innovation and Discovery
 National Instruments Accelerating Innovation and Discovery There s a way to do it better. Find it. Thomas Edison Engineers and scientists have the power to help meet the biggest challenges our planet faces
National Instruments Accelerating Innovation and Discovery There s a way to do it better. Find it. Thomas Edison Engineers and scientists have the power to help meet the biggest challenges our planet faces
GRAND CHALLENGES SCHOLARS PROGRAM: MOTIVATION, VISION AND THE GROWTH OF A MOVEMENT Yannis C. Yortsos Dean
 GRAND CHALLENGES SCHOLARS PROGRAM: MOTIVATION, VISION AND THE GROWTH OF A MOVEMENT Yannis C. Yortsos Dean GCSP MEETING, BANGALORE, INDIA December 14, 2017 This is the most exciting era for Science and
GRAND CHALLENGES SCHOLARS PROGRAM: MOTIVATION, VISION AND THE GROWTH OF A MOVEMENT Yannis C. Yortsos Dean GCSP MEETING, BANGALORE, INDIA December 14, 2017 This is the most exciting era for Science and
Do Engineering: Experimentation for Every Single Student. David Ore, District Sales Manager (NSW & ACT)
") Do Engineering: Experimentation for Every Single Student David Ore, District Sales Manager (NSW & ACT) The Era of Experimentation Theory Experimentation Engineering Grand Challenges Advance health informatics
Do Engineering: Experimentation for Every Single Student David Ore, District Sales Manager (NSW & ACT) The Era of Experimentation Theory Experimentation Engineering Grand Challenges Advance health informatics
David Howarth. Business Development Manager Americas
 David Howarth Business Development Manager Americas David Howarth IPG Automotive USA, Inc. Business Development Manager Americas david.howarth@ipg-automotive.com ni.com Testing Automated Driving Functions
David Howarth Business Development Manager Americas David Howarth IPG Automotive USA, Inc. Business Development Manager Americas david.howarth@ipg-automotive.com ni.com Testing Automated Driving Functions
All that begins... peace be upon you
 All that begins... peace be upon you Faculty of Mechanical Engineering Department of Thermo Fluids SKMM 1922 Introduction to Mechanical Engineering Mechanical Design «An excerpt (mostly) from Jonathan
All that begins... peace be upon you Faculty of Mechanical Engineering Department of Thermo Fluids SKMM 1922 Introduction to Mechanical Engineering Mechanical Design «An excerpt (mostly) from Jonathan
A conversation with Russell Stewart, July 29, 2015
 Participants A conversation with Russell Stewart, July 29, 2015 Russell Stewart PhD Student, Stanford University Nick Beckstead Research Analyst, Open Philanthropy Project Holden Karnofsky Managing Director,
Participants A conversation with Russell Stewart, July 29, 2015 Russell Stewart PhD Student, Stanford University Nick Beckstead Research Analyst, Open Philanthropy Project Holden Karnofsky Managing Director,
Booklet of teaching units
 International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
International Master Program in Mechatronic Systems for Rehabilitation Booklet of teaching units Third semester (M2 S1) Master Sciences de l Ingénieur Université Pierre et Marie Curie Paris 6 Boite 164,
RELEVANCE: Where are we are going anyway?
 RELEVANCE: Where are we are going anyway? William S. Marras President Human Factors and Ergonomics Society Relevance 1 Background Conditions: Change: 2 R&D as a Percent of Federal Budget (FY 1962-2017,
RELEVANCE: Where are we are going anyway? William S. Marras President Human Factors and Ergonomics Society Relevance 1 Background Conditions: Change: 2 R&D as a Percent of Federal Budget (FY 1962-2017,
Speed Control of a Pneumatic Monopod using a Neural Network
 Tech. Rep. IRIS-2-43 Institute for Robotics and Intelligent Systems, USC, 22 Speed Control of a Pneumatic Monopod using a Neural Network Kale Harbick and Gaurav S. Sukhatme! Robotic Embedded Systems Laboratory
Tech. Rep. IRIS-2-43 Institute for Robotics and Intelligent Systems, USC, 22 Speed Control of a Pneumatic Monopod using a Neural Network Kale Harbick and Gaurav S. Sukhatme! Robotic Embedded Systems Laboratory
Intelligent Sensor Platforms for Remotely Piloted and Unmanned Vehicles. Dr. Nick Krouglicof 14 June 2012
 Intelligent Sensor Platforms for Remotely Piloted and Unmanned Vehicles Dr. Nick Krouglicof 14 June 2012 Project Overview Project Duration September 1, 2010 to June 30, 2016 Primary objective(s) / outcomes
Intelligent Sensor Platforms for Remotely Piloted and Unmanned Vehicles Dr. Nick Krouglicof 14 June 2012 Project Overview Project Duration September 1, 2010 to June 30, 2016 Primary objective(s) / outcomes
Image Guided Robotic Assisted Surgical Training System using LabVIEW and CompactRIO
 Image Guided Robotic Assisted Surgical Training System using LabVIEW and CompactRIO Weimin Huang 1, Tao Yang 1, Liang Jing Yang 2, Chee Kong Chui 2, Jimmy Liu 1, Jiayin Zhou 1, Jing Zhang 1, Yi Su 3, Stephen
Image Guided Robotic Assisted Surgical Training System using LabVIEW and CompactRIO Weimin Huang 1, Tao Yang 1, Liang Jing Yang 2, Chee Kong Chui 2, Jimmy Liu 1, Jiayin Zhou 1, Jing Zhang 1, Yi Su 3, Stephen
Analog Vs. Digital Weighing Systems
 Analog Vs. Digital Weighing Systems When sizing up a weighing application there are many options to choose from. With modern technology and the advancements in A/D converter technology the performance
Analog Vs. Digital Weighing Systems When sizing up a weighing application there are many options to choose from. With modern technology and the advancements in A/D converter technology the performance
Job Description. Commitment: Must be available to work full-time hours, M-F for weeks beginning Summer of 2018.
 Research Intern Director of Research We are seeking a summer intern to support the team to develop prototype 3D sensing systems based on state-of-the-art sensing technologies along with computer vision
Research Intern Director of Research We are seeking a summer intern to support the team to develop prototype 3D sensing systems based on state-of-the-art sensing technologies along with computer vision
August 5 8, 2013 Austin, Texas. Preliminary Conference Program. Register now at ni.com/niweek or call
 August 5 8, 2013 Austin, Texas Preliminary Conference Program Register now at ni.com/niweek or call 888 564 9335 NIWeek 2013 Schedule Training and Certification Exams NI Alliance Day Academic Forum Build
August 5 8, 2013 Austin, Texas Preliminary Conference Program Register now at ni.com/niweek or call 888 564 9335 NIWeek 2013 Schedule Training and Certification Exams NI Alliance Day Academic Forum Build
Design of double loop-locked system for brush-less DC motor based on DSP
 International Conference on Advanced Electronic Science and Technology (AEST 2016) Design of double loop-locked system for brush-less DC motor based on DSP Yunhong Zheng 1, a 2, Ziqiang Hua and Li Ma 3
International Conference on Advanced Electronic Science and Technology (AEST 2016) Design of double loop-locked system for brush-less DC motor based on DSP Yunhong Zheng 1, a 2, Ziqiang Hua and Li Ma 3
Glossary of terms. Short explanation
 Glossary Concept Module. Video Short explanation Abstraction 2.4 Capturing the essence of the behavior of interest (getting a model or representation) Action in the control Derivative 4.2 The control signal
Glossary Concept Module. Video Short explanation Abstraction 2.4 Capturing the essence of the behavior of interest (getting a model or representation) Action in the control Derivative 4.2 The control signal
Careers Adviser s Day. Dr Cedric D Mello Associate Dean for Education July 2011
 Careers Adviser s Day Dr Cedric D Mello Associate Dean for Education July 2011 In Today s Presentation Looking back The Engineering profession today How Engineering is changing Modern Trends & Careers
Careers Adviser s Day Dr Cedric D Mello Associate Dean for Education July 2011 In Today s Presentation Looking back The Engineering profession today How Engineering is changing Modern Trends & Careers
Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue
Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue
PID CONTROL FOR TWO-WHEELED INVERTED PENDULUM (WIP) SYSTEM
 SYSTEM") PID CONTROL FOR TWO-WHEELED INVERTED PENDULUM (WIP) SYSTEM Bogdan Grămescu, Constantin Niţu, Nguyen Su Phuong Phuc, Claudia Irina Borzea University POLITEHNICA of Bucharest 313, Splaiul Independentei,
PID CONTROL FOR TWO-WHEELED INVERTED PENDULUM (WIP) SYSTEM Bogdan Grămescu, Constantin Niţu, Nguyen Su Phuong Phuc, Claudia Irina Borzea University POLITEHNICA of Bucharest 313, Splaiul Independentei,
Real-Time Testing Made Easy with Simulink Real-Time
 Real-Time Testing Made Easy with Simulink Real-Time Andreas Uschold Application Engineer MathWorks Martin Rosser Technical Sales Engineer Speedgoat 2015 The MathWorks, Inc. 1 Model-Based Design Continuous
Real-Time Testing Made Easy with Simulink Real-Time Andreas Uschold Application Engineer MathWorks Martin Rosser Technical Sales Engineer Speedgoat 2015 The MathWorks, Inc. 1 Model-Based Design Continuous
UK & Ireland 2013 Graphical System Design Achievement Awards. Application of the Year. Customer Case Study Booklet
 Customer Case Study Booklet UK & Ireland 2013 Graphical System Design Achievement Awards Application of the Year Controlling 70-Ton Gripper Arms for Offshore Wind Turbine Construction Using LabVIEW and
Customer Case Study Booklet UK & Ireland 2013 Graphical System Design Achievement Awards Application of the Year Controlling 70-Ton Gripper Arms for Offshore Wind Turbine Construction Using LabVIEW and
PRODUCTS AND LAB SOLUTIONS
 PRODUCTS AND LAB SOLUTIONS Answering the most challenging academic questions with innovative technology and methods Quanser is the global leader in the design and manufacture of lab solutions and products
PRODUCTS AND LAB SOLUTIONS Answering the most challenging academic questions with innovative technology and methods Quanser is the global leader in the design and manufacture of lab solutions and products
Mechatronics. Bring the challenge. We ll build the solution.
 Mechatronics Bring the challenge. We ll build the solution. VALUE-ADDED ENCODER ASSEMBLIES CUSTOMIZED ROTARY STAGES LINEAR AND CURVED STAGES VOICE COIL STAGES ROBOTIC JOINTS CUSTOMIZED ELECTRONICS, CABLING
Mechatronics Bring the challenge. We ll build the solution. VALUE-ADDED ENCODER ASSEMBLIES CUSTOMIZED ROTARY STAGES LINEAR AND CURVED STAGES VOICE COIL STAGES ROBOTIC JOINTS CUSTOMIZED ELECTRONICS, CABLING
Motor control using FPGA
 Motor control using FPGA MOTIVATION In the previous chapter you learnt ways to interface external world signals with an FPGA. The next chapter discusses digital design and control implementation of different
Motor control using FPGA MOTIVATION In the previous chapter you learnt ways to interface external world signals with an FPGA. The next chapter discusses digital design and control implementation of different
PLANLAB: A Planetary Environment Surface & Subsurface Emulator Facility
 Mem. S.A.It. Vol. 82, 449 c SAIt 2011 Memorie della PLANLAB: A Planetary Environment Surface & Subsurface Emulator Facility R. Trucco, P. Pognant, and S. Drovandi ALTEC Advanced Logistics Technology Engineering
Mem. S.A.It. Vol. 82, 449 c SAIt 2011 Memorie della PLANLAB: A Planetary Environment Surface & Subsurface Emulator Facility R. Trucco, P. Pognant, and S. Drovandi ALTEC Advanced Logistics Technology Engineering
A multi-mode structural health monitoring system for wind turbine blades and components
 A multi-mode structural health monitoring system for wind turbine blades and components Robert B. Owen 1, Daniel J. Inman 2, and Dong S. Ha 2 1 Extreme Diagnostics, Inc., Boulder, CO, 80302, USA rowen@extremediagnostics.com
A multi-mode structural health monitoring system for wind turbine blades and components Robert B. Owen 1, Daniel J. Inman 2, and Dong S. Ha 2 1 Extreme Diagnostics, Inc., Boulder, CO, 80302, USA rowen@extremediagnostics.com
Robotic Technology for Port and Maritime Automation
 Industrial/Service Robots Field Robots Robotic Technology for Port and Maritime Automation Presenter: Assoc Prof Chen I-Ming Director, Robotics Research Center & Intelligent Systems Center School of Mechanical
Industrial/Service Robots Field Robots Robotic Technology for Port and Maritime Automation Presenter: Assoc Prof Chen I-Ming Director, Robotics Research Center & Intelligent Systems Center School of Mechanical
Principles of Engineering
 Principles of Engineering 2004 (Fifth Edition) Clifton Park, New York All rights reserved 1 The National Academy of Sciences Standards: 1.0 Science Inquiry 1.1 Ability necessary to do scientific inquiry
Principles of Engineering 2004 (Fifth Edition) Clifton Park, New York All rights reserved 1 The National Academy of Sciences Standards: 1.0 Science Inquiry 1.1 Ability necessary to do scientific inquiry
GRAND CHALLENGES FOR ENGINEERING
 GRAND CHALLENGES FOR ENGINEERING IN THE EYES OF 21 ST CENTURY STUDENTS New Findings from an Ongoing Global Survey 3 rd Edition 2015 IN PARTNERSHIP WITH: 2015 RESPONDENTS 2009 RESPONDENTS 99 90 COUNTRIES
GRAND CHALLENGES FOR ENGINEERING IN THE EYES OF 21 ST CENTURY STUDENTS New Findings from an Ongoing Global Survey 3 rd Edition 2015 IN PARTNERSHIP WITH: 2015 RESPONDENTS 2009 RESPONDENTS 99 90 COUNTRIES
National Instruments Our Mission
 NI ELVIS National Instruments Our Mission We equip engineers and scientists with tools that accelerate productivity, innovation, and discovery. 2 The NI Teaching Philosophy To inspire and prepare tomorrow
NI ELVIS National Instruments Our Mission We equip engineers and scientists with tools that accelerate productivity, innovation, and discovery. 2 The NI Teaching Philosophy To inspire and prepare tomorrow
Autonomous Cooperative Robots for Space Structure Assembly and Maintenance
 Proceeding of the 7 th International Symposium on Artificial Intelligence, Robotics and Automation in Space: i-sairas 2003, NARA, Japan, May 19-23, 2003 Autonomous Cooperative Robots for Space Structure
Proceeding of the 7 th International Symposium on Artificial Intelligence, Robotics and Automation in Space: i-sairas 2003, NARA, Japan, May 19-23, 2003 Autonomous Cooperative Robots for Space Structure
EURONAVAL, 34 STARTUPS FOR THE SEANNOVATION SPACE
 PRESS RELEASE Paris, July 19, 2018 with the contribution of EURONAVAL, 34 STARTUPS FOR THE SEANNOVATION SPACE The Euronaval exhibition 2018 is set to celebrate 50 years of naval innovation in Paris-Le
PRESS RELEASE Paris, July 19, 2018 with the contribution of EURONAVAL, 34 STARTUPS FOR THE SEANNOVATION SPACE The Euronaval exhibition 2018 is set to celebrate 50 years of naval innovation in Paris-Le
Contents Preface Micro-Doppler Signatures Review, Challenges, and Perspectives Phenomenology of Radar Micro-Doppler Signatures
 Contents Preface xi 1 Micro-Doppler Signatures Review, Challenges, and Perspectives 1 1.1 Introduction 1 1.2 Review of Micro-Doppler Effect in Radar 2 1.2.1 Micro-Doppler Signatures of Rigid Body Motion
Contents Preface xi 1 Micro-Doppler Signatures Review, Challenges, and Perspectives 1 1.1 Introduction 1 1.2 Review of Micro-Doppler Effect in Radar 2 1.2.1 Micro-Doppler Signatures of Rigid Body Motion
Vicki Niu, MacLean Freed, Ethan Takla, Ida Chow and Jeffery Wang Lincoln High School, Portland, OR gmail.com
 Vicki Niu, MacLean Freed, Ethan Takla, Ida Chow and Jeffery Wang Lincoln High School, Portland, OR Nanites4092 @ gmail.com Outline Learning STEM through robotics Our journey from FIRST LEGO League to FIRST
Vicki Niu, MacLean Freed, Ethan Takla, Ida Chow and Jeffery Wang Lincoln High School, Portland, OR Nanites4092 @ gmail.com Outline Learning STEM through robotics Our journey from FIRST LEGO League to FIRST
Accelerating Collective Innovation: Investing in the Innovation Landscape
 PCB Executive Forum Accelerating Collective Innovation: Investing in the Innovation Landscape How a Major Player Uses Internal Venture Program to Accelerate Small Players with Big Ideas Dr. Joan K. Vrtis
PCB Executive Forum Accelerating Collective Innovation: Investing in the Innovation Landscape How a Major Player Uses Internal Venture Program to Accelerate Small Players with Big Ideas Dr. Joan K. Vrtis
TIP List Sorted By Numerical Order (as of January 2018)
") TIP List Sorted By Numerical Order (as of January 2018) 2001 SIGNAL PROCESSING 2003 ANTENNAS AND PROPAGATION 2004 CIRCUITS AND SYSTEMS 2006 VEHICULAR TECHNOLOGY 2007 RELIABILITY 2008 CONSUMER ELECTRONICS
TIP List Sorted By Numerical Order (as of January 2018) 2001 SIGNAL PROCESSING 2003 ANTENNAS AND PROPAGATION 2004 CIRCUITS AND SYSTEMS 2006 VEHICULAR TECHNOLOGY 2007 RELIABILITY 2008 CONSUMER ELECTRONICS
ROBOTICS ENG YOUSEF A. SHATNAWI INTRODUCTION
 ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
ROBOTICS INTRODUCTION THIS COURSE IS TWO PARTS Mobile Robotics. Locomotion (analogous to manipulation) (Legged and wheeled robots). Navigation and obstacle avoidance algorithms. Robot Vision Sensors and
Jaguar Motor Controller (Stellaris Brushed DC Motor Control Module with CAN)
") Jaguar Motor Controller (Stellaris Brushed DC Motor Control Module with CAN) 217-3367 Ordering Information Product Number Description 217-3367 Stellaris Brushed DC Motor Control Module with CAN (217-3367)
Jaguar Motor Controller (Stellaris Brushed DC Motor Control Module with CAN) 217-3367 Ordering Information Product Number Description 217-3367 Stellaris Brushed DC Motor Control Module with CAN (217-3367)
LIFE SCIENCES High Energy Physics. High Energy Physics. Providing high power, high voltage and ultimate reliability to the global scientific market
 Providing high power, high voltage and ultimate reliability to the global scientific market Introduction Image: CERN Large Hadron Collider About us We have supplied high power, often bespoke, products
Providing high power, high voltage and ultimate reliability to the global scientific market Introduction Image: CERN Large Hadron Collider About us We have supplied high power, often bespoke, products
Hydro Mechanics & Water Resources Engineering. Water. Management PTPG IV - Semester. PTPG IV - Semester Pre stressed Concrete
 Date and Day Pre stressed UNIVERSITY COLLEGE OF ENGINEERING (Autonomous) OSMANIA UNIVERSITY M. E. (Civil) ( & ) and IV-Semester () Main Examination September 2012 EXAMINATION TIME TABLE Structural Prestressed
Date and Day Pre stressed UNIVERSITY COLLEGE OF ENGINEERING (Autonomous) OSMANIA UNIVERSITY M. E. (Civil) ( & ) and IV-Semester () Main Examination September 2012 EXAMINATION TIME TABLE Structural Prestressed
Robot Motion Planning
 Robot Motion Planning Dinesh Manocha dm@cs.unc.edu The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL Robots are used everywhere HRP4C humanoid Swarm robots da vinci Big dog MEMS bugs Snake robot 2 The UNIVERSITY
Robot Motion Planning Dinesh Manocha dm@cs.unc.edu The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL Robots are used everywhere HRP4C humanoid Swarm robots da vinci Big dog MEMS bugs Snake robot 2 The UNIVERSITY
Electromechanical Technology /Electromechanical Engineering Technology CIP Task Grid
 1 Secondary Task List 100 DEMONSTRATE KNOWLEDGE OF TECHNICAL REPORTS 101 Identify components of technical reports. 102 Demonstrate knowledge of the common components of technical documents. 103 Maintain
1 Secondary Task List 100 DEMONSTRATE KNOWLEDGE OF TECHNICAL REPORTS 101 Identify components of technical reports. 102 Demonstrate knowledge of the common components of technical documents. 103 Maintain
A Modular Architecture for an Interactive Real-Time Simulation and Training Environment for Satellite On-Orbit Servicing
 A Modular Architecture for an Interactive Real-Time Simulation and Training Environment for Satellite On-Orbit Servicing Robin Wolff German Aerospace Center (DLR), Germany Slide 1 Outline! Motivation!
A Modular Architecture for an Interactive Real-Time Simulation and Training Environment for Satellite On-Orbit Servicing Robin Wolff German Aerospace Center (DLR), Germany Slide 1 Outline! Motivation!
sin( x m cos( The position of the mass point D is specified by a set of state variables, (θ roll, θ pitch, r) related to the Cartesian coordinates by:
 related to the Cartesian coordinates by:") Research Article International Journal of Current Engineering and Technology ISSN 77-46 3 INPRESSCO. All Rights Reserved. Available at http://inpressco.com/category/ijcet Modeling improvement of a Humanoid
Research Article International Journal of Current Engineering and Technology ISSN 77-46 3 INPRESSCO. All Rights Reserved. Available at http://inpressco.com/category/ijcet Modeling improvement of a Humanoid
Constant voltage and Constant frequency operation of DFIG using Lab view FPGA and crio
 IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 2320-3331, Volume 13, Issue 1 Ver. I (Jan. Feb. 2018), PP 73-78 www.iosrjournals.org Constant voltage and Constant
IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 2320-3331, Volume 13, Issue 1 Ver. I (Jan. Feb. 2018), PP 73-78 www.iosrjournals.org Constant voltage and Constant
The 3xD Simulator for Intelligent Vehicles Professor Paul Jennings. 20 th October 2016
 The 3xD Simulator for Intelligent Vehicles Professor Paul Jennings 20 th October 2016 An academic department within the science faculty Established in 1980 by Professor Lord Bhattacharyya as Warwick Manufacturing
The 3xD Simulator for Intelligent Vehicles Professor Paul Jennings 20 th October 2016 An academic department within the science faculty Established in 1980 by Professor Lord Bhattacharyya as Warwick Manufacturing
Model 332 Temperature Controller
 94 Instruments Model 332 Temperature Controller Features Operates down to 500 mk with appropriate NTC RTD sensors Model 332 Temperature Controller Two sensor inputs Supports diode, RTD, and thermocouple
94 Instruments Model 332 Temperature Controller Features Operates down to 500 mk with appropriate NTC RTD sensors Model 332 Temperature Controller Two sensor inputs Supports diode, RTD, and thermocouple
Study on a Simplified Converter Topology for Fault Tolerant Motor Drives
 Study on a Simplified Converter Topology for Fault Tolerant Motor Drives L. Szabó, M. Ruba and D. Fodorean Technical University of Cluj, Department of Electrical Machines, Cluj, Romania Abstract Some of
Study on a Simplified Converter Topology for Fault Tolerant Motor Drives L. Szabó, M. Ruba and D. Fodorean Technical University of Cluj, Department of Electrical Machines, Cluj, Romania Abstract Some of
Safe, Efficient and Effective Testing of Connected and Autonomous Vehicles Paul Jennings. Franco-British Symposium on ITS 5 th October 2016
 Safe, Efficient and Effective Testing of Connected and Autonomous Vehicles Paul Jennings Franco-British Symposium on ITS 5 th October 2016 An academic department within the science faculty Established
Safe, Efficient and Effective Testing of Connected and Autonomous Vehicles Paul Jennings Franco-British Symposium on ITS 5 th October 2016 An academic department within the science faculty Established
Design and Implementation of FPGA Based Quadcopter
 Design and Implementation of FPGA Based Quadcopter G Premkumar 1 SCSVMV, Kanchipuram, Tamil Nadu, INDIA R Jayalakshmi 2 Assistant Professor, SCSVMV, Kanchipuram, Tamil Nadu, INDIA Md Akramuddin 3 Project
Design and Implementation of FPGA Based Quadcopter G Premkumar 1 SCSVMV, Kanchipuram, Tamil Nadu, INDIA R Jayalakshmi 2 Assistant Professor, SCSVMV, Kanchipuram, Tamil Nadu, INDIA Md Akramuddin 3 Project
5G R&D at Huawei: An Insider Look
 5G R&D at Huawei: An Insider Look Accelerating the move from theory to engineering practice with MATLAB and Simulink Huawei is the largest networking and telecommunications equipment and services corporation
5G R&D at Huawei: An Insider Look Accelerating the move from theory to engineering practice with MATLAB and Simulink Huawei is the largest networking and telecommunications equipment and services corporation
CERN (The European Laboratory for Particle Physics)
") 462 IEEE TRANSACTIONS ON INSTRUMENTATION AND MEASUREMENT, VOL. 48, NO. 2, APRIL 1999 The Measurement Challenge of the LHC Project Gunnar Fernqvist Abstract In 2005, CERN is planning to commission its next
462 IEEE TRANSACTIONS ON INSTRUMENTATION AND MEASUREMENT, VOL. 48, NO. 2, APRIL 1999 The Measurement Challenge of the LHC Project Gunnar Fernqvist Abstract In 2005, CERN is planning to commission its next
Chapter 1 Introduction to Robotics
 Chapter 1 Introduction to Robotics PS: Most of the pages of this presentation were obtained and adapted from various sources in the internet. 1 I. Definition of Robotics Definition (Robot Institute of
Chapter 1 Introduction to Robotics PS: Most of the pages of this presentation were obtained and adapted from various sources in the internet. 1 I. Definition of Robotics Definition (Robot Institute of
SENLUTION Miniature Angular & Heading Reference System The World s Smallest Mini-AHRS
 SENLUTION Miniature Angular & Heading Reference System The World s Smallest Mini-AHRS MotionCore, the smallest size AHRS in the world, is an ultra-small form factor, highly accurate inertia system based
SENLUTION Miniature Angular & Heading Reference System The World s Smallest Mini-AHRS MotionCore, the smallest size AHRS in the world, is an ultra-small form factor, highly accurate inertia system based
Distributed Robotics From Science to Systems
 Distributed Robotics From Science to Systems Nikolaus Correll Distributed Robotics Laboratory, CSAIL, MIT August 8, 2008 Distributed Robotic Systems DRS 1 sensor 1 actuator... 1 device Applications Giant,
Distributed Robotics From Science to Systems Nikolaus Correll Distributed Robotics Laboratory, CSAIL, MIT August 8, 2008 Distributed Robotic Systems DRS 1 sensor 1 actuator... 1 device Applications Giant,
International Journal of Advance Engineering and Research Development
 Scientific Journal of Impact Factor (SJIF): 4.14 International Journal of Advance Engineering and Research Development Volume 3, Issue 2, February -2016 e-issn (O): 2348-4470 p-issn (P): 2348-6406 SIMULATION
Scientific Journal of Impact Factor (SJIF): 4.14 International Journal of Advance Engineering and Research Development Volume 3, Issue 2, February -2016 e-issn (O): 2348-4470 p-issn (P): 2348-6406 SIMULATION
Hydro-Sanat-Sharif Co Ltd. The HSSH. Company Profile
 Company Profile Hydro-Sanat-Sharif Co Ltd The HSSH is active in the technical fields including mechanics (designing and manufacturing Mechanical and hydraulic systems), Electronics (electronics and power),
Company Profile Hydro-Sanat-Sharif Co Ltd The HSSH is active in the technical fields including mechanics (designing and manufacturing Mechanical and hydraulic systems), Electronics (electronics and power),
ELECTRICAL AND ELECTRONIC ENGINEERING COURSES
 ELECTRICAL AND ELECTRONIC ENGINEERING COURSES PH1012 PHYSICS A [Academic Units: 4.0 ; Pre-requisite: Nil ; Contact Hours: Lec: 39 hr ; Tut: 12 hrs] Vectors. Kinematics. Forces and torques. Newton s laws
ELECTRICAL AND ELECTRONIC ENGINEERING COURSES PH1012 PHYSICS A [Academic Units: 4.0 ; Pre-requisite: Nil ; Contact Hours: Lec: 39 hr ; Tut: 12 hrs] Vectors. Kinematics. Forces and torques. Newton s laws
GTU- Centre of Excellence in Automation
 Gujarat Technological University Centre of Excellence in Automation LABS UNDER CENTER OF EXCELLENCE Hydraulic Lab. Pneumatic Lab. Sensor Lab. Programmable logic controller(plc) Robotics & Mechatronics
Gujarat Technological University Centre of Excellence in Automation LABS UNDER CENTER OF EXCELLENCE Hydraulic Lab. Pneumatic Lab. Sensor Lab. Programmable logic controller(plc) Robotics & Mechatronics
STANDARD PRIMARY RESISTANCE QHR2000 A NEW STANDARD IN MEASUREMENT. Comparison of the 100 Ohm standard with RK to 1 part in 10 8.
 PRIMARY RESISTANCE STANDARD QHR2000 A NEW STANDARD IN MEASUREMENT Comparison of the 100 Ohm standard with RK to 1 part in 10 8. Cryogenic Current Comparator (CCC) in separate low loss cryostat. Wide range
PRIMARY RESISTANCE STANDARD QHR2000 A NEW STANDARD IN MEASUREMENT Comparison of the 100 Ohm standard with RK to 1 part in 10 8. Cryogenic Current Comparator (CCC) in separate low loss cryostat. Wide range
Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular
Available theses in robotics (November 2017) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular
CHAPTER 7 HARDWARE IMPLEMENTATION
 168 CHAPTER 7 HARDWARE IMPLEMENTATION 7.1 OVERVIEW In the previous chapters discussed about the design and simulation of Discrete controller for ZVS Buck, Interleaved Boost, Buck-Boost, Double Frequency
168 CHAPTER 7 HARDWARE IMPLEMENTATION 7.1 OVERVIEW In the previous chapters discussed about the design and simulation of Discrete controller for ZVS Buck, Interleaved Boost, Buck-Boost, Double Frequency
TELEOPERATED SYSTEM WITH ACCELEROMETERS FOR DISABILITY
 TELEOPERATED SYSTEM WITH ACCELEROMETERS FOR DISABILITY Josue Zarate Valdez Ruben Diaz Cucho University San Luis Gonzaga, Peru Abstract This project involves the implementation of a teleoperated arm using
TELEOPERATED SYSTEM WITH ACCELEROMETERS FOR DISABILITY Josue Zarate Valdez Ruben Diaz Cucho University San Luis Gonzaga, Peru Abstract This project involves the implementation of a teleoperated arm using
ACTUATORS AND SENSORS. Joint actuating system. Servomotors. Sensors
 ACTUATORS AND SENSORS Joint actuating system Servomotors Sensors JOINT ACTUATING SYSTEM Transmissions Joint motion low speeds high torques Spur gears change axis of rotation and/or translate application
ACTUATORS AND SENSORS Joint actuating system Servomotors Sensors JOINT ACTUATING SYSTEM Transmissions Joint motion low speeds high torques Spur gears change axis of rotation and/or translate application
Brushed DC Motor Control. Module with CAN (MDL-BDC24)
") Stellaris Brushed DC Motor Control Module with CAN (MDL-BDC24) Ordering Information Product No. MDL-BDC24 RDK-BDC24 Description Stellaris Brushed DC Motor Control Module with CAN (MDL-BDC24) for Single-Unit
Stellaris Brushed DC Motor Control Module with CAN (MDL-BDC24) Ordering Information Product No. MDL-BDC24 RDK-BDC24 Description Stellaris Brushed DC Motor Control Module with CAN (MDL-BDC24) for Single-Unit
CAPACITIES FOR TECHNOLOGY TRANSFER
 CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
Department of Mechatronics Engineering
 Department of Mechatronics Engineering COURSES COVERED CONTROL SYSTEM POWER ELECTRONICS ELECTROMECHANICAL SYSTEM SENSORS AND INTRUMENTATION LAB SUPERVISOR: ENGR. MOEZ UL HASSAN NI ELVIS II The NI Educational
Department of Mechatronics Engineering COURSES COVERED CONTROL SYSTEM POWER ELECTRONICS ELECTROMECHANICAL SYSTEM SENSORS AND INTRUMENTATION LAB SUPERVISOR: ENGR. MOEZ UL HASSAN NI ELVIS II The NI Educational
(or Climbing the Peak without Falling Off the Other Side ) Dave Edwards
 Dave Edwards") (or Climbing the Peak without Falling Off the Other Side ) Dave Edwards Ripple Correlation Control In wind, water or solar alternative energy power conversion systems, tracking and delivering maximum power
(or Climbing the Peak without Falling Off the Other Side ) Dave Edwards Ripple Correlation Control In wind, water or solar alternative energy power conversion systems, tracking and delivering maximum power
The Oil & Gas Industry Requirements for Marine Robots of the 21st century
 The Oil & Gas Industry Requirements for Marine Robots of the 21st century www.eninorge.no Laura Gallimberti 20.06.2014 1 Outline Introduction: fast technology growth Overview underwater vehicles development
The Oil & Gas Industry Requirements for Marine Robots of the 21st century www.eninorge.no Laura Gallimberti 20.06.2014 1 Outline Introduction: fast technology growth Overview underwater vehicles development
Time-Frequency Detection: Application to Sub-Bottom SONAR
 Time-Frequency Detection: Application to Sub-Bottom SONAR c November 2 1 1 Summary Arescon Research has developed a method to detect narrow-band transient signals in a noise contaminated environment. This
Time-Frequency Detection: Application to Sub-Bottom SONAR c November 2 1 1 Summary Arescon Research has developed a method to detect narrow-band transient signals in a noise contaminated environment. This
Distribution Fault Location
 Distribution Fault Location 1. Introduction The objective of our project is to create an integrated fault locating system that accurate locates faults in real-time. The system will be available for users
Distribution Fault Location 1. Introduction The objective of our project is to create an integrated fault locating system that accurate locates faults in real-time. The system will be available for users
Joint Industry Program: Development of Improved Ice Management Capabilities for Operations in Arctic and Harsh Environments.
 Joint Industry Program: Development of Improved Ice Management Capabilities for Operations in Arctic and Harsh Environments November 2014 This page is intentionally blank. 2 Introduction Petroleum Research
Joint Industry Program: Development of Improved Ice Management Capabilities for Operations in Arctic and Harsh Environments November 2014 This page is intentionally blank. 2 Introduction Petroleum Research
Pramod Kumar Naik Senior Application Engineer MathWorks Products
 MATLAB & SIMULINK Pramod Kumar Naik Senior Application Engineer MathWorks Products 2 Enabling Excellence Through Innovation System Engineering Intellectual Property (IP) EDA & Semiconductor University
MATLAB & SIMULINK Pramod Kumar Naik Senior Application Engineer MathWorks Products 2 Enabling Excellence Through Innovation System Engineering Intellectual Property (IP) EDA & Semiconductor University
Using Simulation to Design Control Strategies for Robotic No-Scar Surgery
 Using Simulation to Design Control Strategies for Robotic No-Scar Surgery Antonio DE DONNO 1, Florent NAGEOTTE, Philippe ZANNE, Laurent GOFFIN and Michel de MATHELIN LSIIT, University of Strasbourg/CNRS,
Using Simulation to Design Control Strategies for Robotic No-Scar Surgery Antonio DE DONNO 1, Florent NAGEOTTE, Philippe ZANNE, Laurent GOFFIN and Michel de MATHELIN LSIIT, University of Strasbourg/CNRS,
Smart Manufacturing: A Big Data Perspective. Andrew Kusiak Intelligent Systems Laboratory The University of Iowa Iowa City, Iowa USA
 Smart Manufacturing: A Big Data Perspective Andrew Kusiak Iowa City, Iowa USA andrew-kusiak@uiowa.edu https://research.engineering.uiowa.edu/kusiak/ ISPR 2017, Wien, Austria Outline Introduction Data-driven
Smart Manufacturing: A Big Data Perspective Andrew Kusiak Iowa City, Iowa USA andrew-kusiak@uiowa.edu https://research.engineering.uiowa.edu/kusiak/ ISPR 2017, Wien, Austria Outline Introduction Data-driven
BENEFITS OF A DUAL-ARM ROBOTIC SYSTEM
 Part one of a four-part ebook Series. BENEFITS OF A DUAL-ARM ROBOTIC SYSTEM Don t just move through your world INTERACT with it. A Publication of RE2 Robotics Table of Contents Introduction What is a Highly
Part one of a four-part ebook Series. BENEFITS OF A DUAL-ARM ROBOTIC SYSTEM Don t just move through your world INTERACT with it. A Publication of RE2 Robotics Table of Contents Introduction What is a Highly
More Light and Speed in Production Control CORE
 More Light and Speed in Production Control CORE CORE The Centre for Production Metrology Developed to speed production, CORE provides the ultimate in flexible 3D inspection solutions for advanced part
More Light and Speed in Production Control CORE CORE The Centre for Production Metrology Developed to speed production, CORE provides the ultimate in flexible 3D inspection solutions for advanced part
Gyrocompass and motion sensor. octans. navigation and positioning
 Gyrocompass and motion sensor octans navigation and positioning the best in fog technology The technological heart of is the Fibre-Optic Gyroscope (FOG), the only truly-solid-state answer to rotation sensing.
Gyrocompass and motion sensor octans navigation and positioning the best in fog technology The technological heart of is the Fibre-Optic Gyroscope (FOG), the only truly-solid-state answer to rotation sensing.
INNOVATION STARTS HERE AVIATION DIVING ENGINEERING & DEVELOPMENT LIFTING & ENGINEERING SUBSEA WORKSHOP
 Introduction For over 35 years Imenco has supplied mechanical, electronic and bespoke engineering solutions to customers around world. Our business activities predominantly support the major oil and gas,
Introduction For over 35 years Imenco has supplied mechanical, electronic and bespoke engineering solutions to customers around world. Our business activities predominantly support the major oil and gas,
EE152 Final Project Report
 LPMC (Low Power Motor Controller) EE152 Final Project Report Summary: For my final project, I designed a brushless motor controller that operates with 6-step commutation with a PI speed loop. There are
LPMC (Low Power Motor Controller) EE152 Final Project Report Summary: For my final project, I designed a brushless motor controller that operates with 6-step commutation with a PI speed loop. There are
UNLV ME 425/625 Robotics. Introduction and Course Philosophy
 UNLV ME 425/625 Robotics Introduction and Course Philosophy Paul Oh: Background 5+ years industry before Drexel ME Professor since 2000 Advisor: ASME 10-years Advisor: 8+ SD teams 3 SD awards (COE, ASME,
UNLV ME 425/625 Robotics Introduction and Course Philosophy Paul Oh: Background 5+ years industry before Drexel ME Professor since 2000 Advisor: ASME 10-years Advisor: 8+ SD teams 3 SD awards (COE, ASME,