ROS Tutorial. Me133a Joseph & Daniel 11/01/2017
|
|
|
- Ross Fox
- 5 years ago
- Views:
Transcription
1 ROS Tutorial Me133a Joseph & Daniel 11/01/2017
2 Introduction to ROS 2D Turtle Simulation 3D Turtlebot Simulation Real Turtlebot Demo
3 What is ROS ROS is an open-source, meta-operating system for your robot open-source: all code is public. Most people share their code as to be used with ROS meta-operating system: contains many of the components expected in an OS: hardware abstraction, low-level control, package management We can use C++ or Python We will cover the basics with some examples. Follow the tutorials to understand more Note: each version of ROS works with a different Ubuntu (the virtual machine has Ubuntu 14 and ROS Indigo) ROS Indigo works with Ubuntu ROS Kinect works with Ubuntu
4 ROS Terminology Package: a collection of software bundle together Nodes: a process $ rosrun <packagename> <nodename> $ roscore Topics: labelled buses to exchange data between nodes $ rostopic list Messages: data structures. $ rostopic type <topic> $ rosmsg show <messagetype> Launch file: it can run several nodes at once with specific parameters $ roslaunch <packagename> <launchfile> 4
5 ROS Tools Comes prepackaged with some useful stuff $ rqt Debugging $ rqt_graph node-topic interaction $ roswtf general troubleshooter (v. useful) Visualization $ rqt_plot 2D plot $ rviz 3D plot 5
6 Why do we use ROS? We use ROS to Interact between different programs (threads) running in parallel Interact with robot hardware Display data in real time Record and replay sensor data Advantages of ROS It is a easy way to share and use code from others There are already many drivers and programs to use It hides the complexity to use several computers talking to each other We can use the speed of C++ in some parts and the flexibility of Python in other parts. It is becoming the de-facto standard in for robotics in industry and academia, you should learn it! 6
7 Basic linux commands Open a new terminal (ctrl + alt + T) Navigate your filesystem using $ cd path where path is the folder you want to go $ cd.. to go back one folder $ ls to display the contents in the current folder $ ls -l adding the argument -l gives more info Use key TAB to autocomplete results ~ denotes the Home directory $ cd ~/Documents 7
8 Introduction to ROS 2D Turtle Simulation 3D Turtlebot Simulation Real Turtlebot Demo
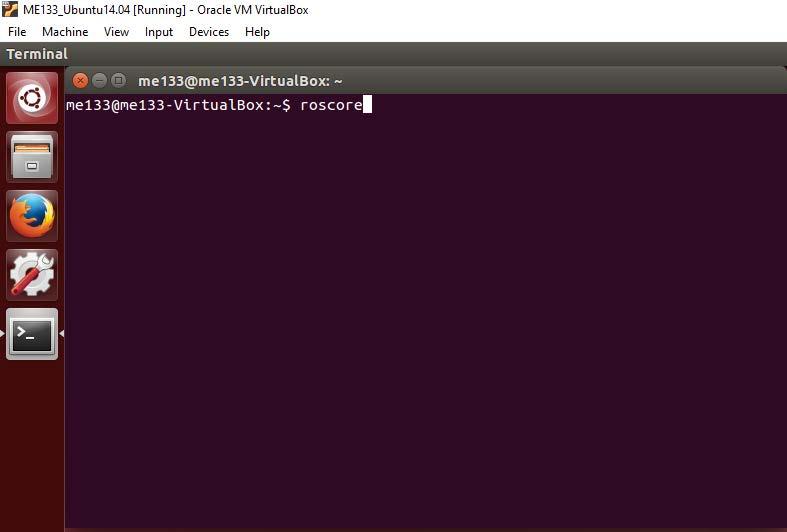
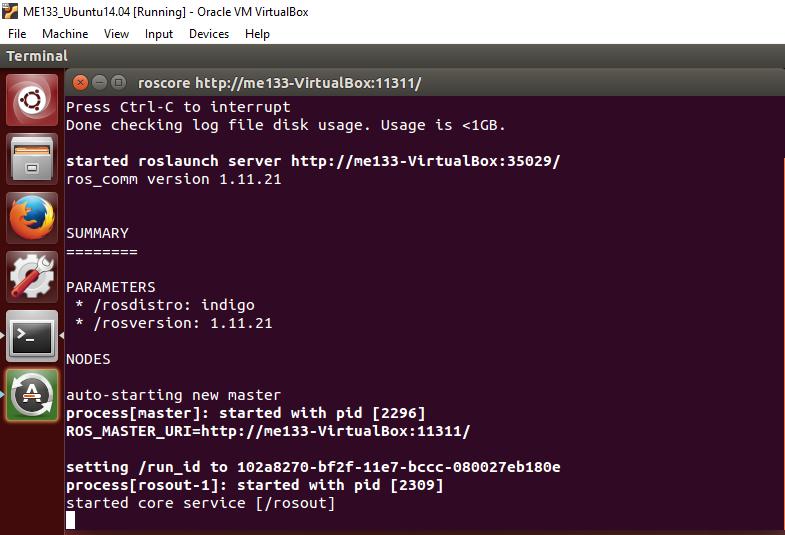
9 ROS setup Open the virtual machine For each command open a new terminal (ctrl + alt + T) Start ROS core $ roscore 9
10 2D Turtle Simulation ROS tutorial: Start turtlesim node $ rosrun turtlesim turtlesim_node Start keyboard teleoperation node $ rosrun turtlesim turtle_teleop_key Visualize the node graph $ rqt_graph 10
11 2D Turtle Simulation 11

12 2D Turtle Simulation You need at least 3 terminal windows 12
13 After turtlesim_node After turtlesim_node and turtle_teleop_key 13
14 Introduction to ROS 2D Turtle Simulation 3D Turtlebot Simulation Real Turtlebot Demo
15 3D Turtlebot Simulation We have limited hardware and it can break: we will use the simulation to test our algorithms It includes dynamics, sensors and actuators models It uses Gazebo, a simulation environment built-in ROS 15

16 3D Turtlebot Simulation Close all previous terminals and execute $ roslaunch turtlebot_stage turtlebot_in_stage.launch $ roslaunch turtlebot_teleop keyboard_teleop.launch $ rqt_graph 16
17 3D Turtlebot Simulation Graph 17
18 3D Turtlebot Run a Script Open Firefox and go to the class webpage Download Python script for lab 1 and save it Cancel the turtlebot_teleop node (ctrl + C) and then run the commands: $ cd Downloads $ python me133a_lab1.py Open the file with the command: $ gedit me133a_lab1.py 18
19 Introduction to ROS 2D Turtle Simulation 3D Turtlebot Simulation Real Turtlebot Demo

20 Turtlebot Kobuki Base: it has 2 motors with wheel encoders Sensors: Gyroscopes Wheel encoders Hokugi 2D lidar Kinect rgb-d camera 20
21 Real Turtlebot Demo We will use turtlebot for future labs To start it: Turn on the turtlebot laptop and log in Turn on the base Run $ roslaunch turtlebot_bringup minimal.launch Run whatever scripts you need 21
22 That is just the beginning.. Things we haven t covered: How to record and play data using bags How to write your own programs to publish and subscribe topics How to create your own packages How to create your own messages Undestanding of ROS transforms (tf) How to create your own rqt plugin 22
23 Extra: using Bag files Bag file: ROS format to store data Binary. Record: $ rosbag record <newbagname.bag> <topicstorecord> Use option -a to record all topics (warning: recording video takes a lot of space!) Analyze $ rosbag info <existingbagname.bag> Play $ rosbag play <existingbagname.bag> 23
CONNECT TO BUFFALO ROUTER
 02/08/18 TurtleBot1 Cheat Sheet with Mapping I. ON TURTLEBOT 1. POWER TO NETBOOK 2. LOG ON NETBOOK PASS: TB 3. POWER ON BASE (Button to right of base) 4. CONNECT NETBOOK TO BASE (lower left of base) 5.
02/08/18 TurtleBot1 Cheat Sheet with Mapping I. ON TURTLEBOT 1. POWER TO NETBOOK 2. LOG ON NETBOOK PASS: TB 3. POWER ON BASE (Button to right of base) 4. CONNECT NETBOOK TO BASE (lower left of base) 5.
CSCE 574 Robotics Fall 2018
 CSCE 574 Robotics Fall 2018 Courtesy of Alberto Quattrini Li. Notes on the Turtlebot 2 This document contains some details on how to use the Turtlebot 2 robots. For any question, please email the instructors.
CSCE 574 Robotics Fall 2018 Courtesy of Alberto Quattrini Li. Notes on the Turtlebot 2 This document contains some details on how to use the Turtlebot 2 robots. For any question, please email the instructors.
Mini Turty II Robot Getting Started V1.0
 Mini Turty II Robot Getting Started V1.0 Rhoeby Dynamics Mini Turty II Robot Getting Started Getting Started with Mini Turty II Robot Thank you for your purchase, and welcome to Rhoeby Dynamics products!
Mini Turty II Robot Getting Started V1.0 Rhoeby Dynamics Mini Turty II Robot Getting Started Getting Started with Mini Turty II Robot Thank you for your purchase, and welcome to Rhoeby Dynamics products!
Other RTOS services Embedded Motion Control 2012
 Other RTOS services Embedded Motion Control 2012 Group 7: Siddhi Imming Bart Moris Roger Pouls Patrick Vaes Eindhoven, May 29, 2012 Content Other RTOS services Connecting two nodes ROS debugging tools
Other RTOS services Embedded Motion Control 2012 Group 7: Siddhi Imming Bart Moris Roger Pouls Patrick Vaes Eindhoven, May 29, 2012 Content Other RTOS services Connecting two nodes ROS debugging tools
Say hello to BAXTER! A.P.R.I.L. Project - Residential Workshop Plymouth MSc. CNCR Gabriella Pizzuto & MSc. Eng. Ricardo de Azambuja
 Say hello to BAXTER! A.P.R.I.L. Project - Residential Workshop Plymouth 2016 MSc. CNCR Gabriella Pizzuto & MSc. Eng. Ricardo de Azambuja By the end of this workshop, you should be able to: Understand what
Say hello to BAXTER! A.P.R.I.L. Project - Residential Workshop Plymouth 2016 MSc. CNCR Gabriella Pizzuto & MSc. Eng. Ricardo de Azambuja By the end of this workshop, you should be able to: Understand what
Marine Robotics. Alfredo Martins. Unmanned Autonomous Vehicles in Air Land and Sea. Politecnico Milano June 2016
 Marine Robotics Unmanned Autonomous Vehicles in Air Land and Sea Politecnico Milano June 2016 INESC TEC / ISEP Portugal alfredo.martins@inesctec.pt Tools 2 MOOS Mission Oriented Operating Suite 3 MOOS
Marine Robotics Unmanned Autonomous Vehicles in Air Land and Sea Politecnico Milano June 2016 INESC TEC / ISEP Portugal alfredo.martins@inesctec.pt Tools 2 MOOS Mission Oriented Operating Suite 3 MOOS
Running the PR2. Chapter Getting set up Out of the box Batteries and power
 Chapter 5 Running the PR2 Running the PR2 requires a basic understanding of ROS (http://www.ros.org), the BSD-licensed Robot Operating System. A ROS system consists of multiple processes running on multiple
Chapter 5 Running the PR2 Running the PR2 requires a basic understanding of ROS (http://www.ros.org), the BSD-licensed Robot Operating System. A ROS system consists of multiple processes running on multiple
TurtleBot2&ROS - Learning TB2
 TurtleBot2&ROS - Learning TB2 Ing. Zdeněk Materna Department of Computer Graphics and Multimedia Fakulta informačních technologií VUT v Brně TurtleBot2&ROS - Learning TB2 1 / 22 Presentation outline Introduction
TurtleBot2&ROS - Learning TB2 Ing. Zdeněk Materna Department of Computer Graphics and Multimedia Fakulta informačních technologií VUT v Brně TurtleBot2&ROS - Learning TB2 1 / 22 Presentation outline Introduction
Individual Hands-On Project Description
 Individual Hands-On Project Description Door unlocking using Face Detection Aishwary Jagetia adjagetia@wpi.edu 1. Summary of Accomplishments: 1.1. Did you complete all of the basic requirements? 1.1.1.
Individual Hands-On Project Description Door unlocking using Face Detection Aishwary Jagetia adjagetia@wpi.edu 1. Summary of Accomplishments: 1.1. Did you complete all of the basic requirements? 1.1.1.
Introducing modern robotics with ROS and Arduino
 Introducing modern robotics with ROS and Arduino Igor Zubrycki, Grzegorz Granosik Lodz University of Technology tel +48 42 6312554 Email: igor.zubrycki@dokt.p.lodz.pl, granosik@p.lodz.pl Abstract This
Introducing modern robotics with ROS and Arduino Igor Zubrycki, Grzegorz Granosik Lodz University of Technology tel +48 42 6312554 Email: igor.zubrycki@dokt.p.lodz.pl, granosik@p.lodz.pl Abstract This
Using Robot Operating System (ROS) and Single Board Computer to Control Bioloid Robot Motion
 and Single Board Computer to Control Bioloid Robot Motion") Using Robot Operating System (ROS) and Single Board Computer to Control Bioloid Robot Motion Ganesh Kumar Kalyani 1, Zhijun Yang 2, Vaibhav Gandhi 3, and Tao Geng 4 Design Engineering and Mathematics department,
Using Robot Operating System (ROS) and Single Board Computer to Control Bioloid Robot Motion Ganesh Kumar Kalyani 1, Zhijun Yang 2, Vaibhav Gandhi 3, and Tao Geng 4 Design Engineering and Mathematics department,
Overseer: A Multi Robot Monitoring Infrastructure
 Overseer: A Multi Robot Monitoring Infrastructure Felipe Roman, Alexandre Amory and Renan Maidana School of Technology, Pontifical Catholic University of Rio Grande do Sul, Porto Alegre, Brazil {felipe.roman,
Overseer: A Multi Robot Monitoring Infrastructure Felipe Roman, Alexandre Amory and Renan Maidana School of Technology, Pontifical Catholic University of Rio Grande do Sul, Porto Alegre, Brazil {felipe.roman,
Shadow Robot Documentation
 Shadow Robot Documentation Release 1.4.0 Ugo Cupcic Jun 12, 2018 Contents 1 Workspaces 3 2 Updating your workspace 5 3 Installing for a real robot 7 3.1 Configuration...............................................
Shadow Robot Documentation Release 1.4.0 Ugo Cupcic Jun 12, 2018 Contents 1 Workspaces 3 2 Updating your workspace 5 3 Installing for a real robot 7 3.1 Configuration...............................................
1 Lab + Hwk 4: Introduction to the e-puck Robot
 1 Lab + Hwk 4: Introduction to the e-puck Robot This laboratory requires the following: (The development tools are already installed on the DISAL virtual machine (Ubuntu Linux) in GR B0 01): C development
1 Lab + Hwk 4: Introduction to the e-puck Robot This laboratory requires the following: (The development tools are already installed on the DISAL virtual machine (Ubuntu Linux) in GR B0 01): C development
Lab 8: Introduction to the e-puck Robot
 Lab 8: Introduction to the e-puck Robot This laboratory requires the following equipment: C development tools (gcc, make, etc.) C30 programming tools for the e-puck robot The development tree which is
Lab 8: Introduction to the e-puck Robot This laboratory requires the following equipment: C development tools (gcc, make, etc.) C30 programming tools for the e-puck robot The development tree which is
Lab 3 Swinging pendulum experiment
 Lab 3 Swinging pendulum experiment Agenda Time 10 min Item Review agenda Introduce the swinging pendulum experiment and apparatus 95 min Lab activity I ll try to give you a 5- minute warning before the
Lab 3 Swinging pendulum experiment Agenda Time 10 min Item Review agenda Introduce the swinging pendulum experiment and apparatus 95 min Lab activity I ll try to give you a 5- minute warning before the
Introduction to Pioneer Robots
 CSci-5552: Sensing and Estimation in Robotics Introduction to Pioneer Robots 3/3/2016 CSCI-5552: INTRODUCTION TO PIONEER ROBOTS 1 Organizational Matters Undergraduate Robotics Lab: KHKH 1-202 Need to get
CSci-5552: Sensing and Estimation in Robotics Introduction to Pioneer Robots 3/3/2016 CSCI-5552: INTRODUCTION TO PIONEER ROBOTS 1 Organizational Matters Undergraduate Robotics Lab: KHKH 1-202 Need to get
Developing Applications for the ROBOBO! robot
 Developing Applications for the ROBOBO! robot Gervasio Varela gervasio.varela@mytechia.com Outline ROBOBO!, the robot ROBOBO! Framework Developing native apps Developing ROS apps Let s Hack ROBOBO!, the
Developing Applications for the ROBOBO! robot Gervasio Varela gervasio.varela@mytechia.com Outline ROBOBO!, the robot ROBOBO! Framework Developing native apps Developing ROS apps Let s Hack ROBOBO!, the
NASA Robotic Mining Competition
 Abstract University of Arkansas CSCE Department Capstone II Preliminary Report Spring 2015 NASA Robotic Mining Competition Susan Everett, Rachel Findley, Carl Smith In the 1960s, NASA brought to mankind
Abstract University of Arkansas CSCE Department Capstone II Preliminary Report Spring 2015 NASA Robotic Mining Competition Susan Everett, Rachel Findley, Carl Smith In the 1960s, NASA brought to mankind
Reviewing Your Tax Return In Your Portal
 Reviewing Your Tax Return In Your Portal 1. Go to our website www.franklinincpa.com and click on the link at the bottom left of the screen for Client Connect. a. This link will take you to the login screen
Reviewing Your Tax Return In Your Portal 1. Go to our website www.franklinincpa.com and click on the link at the bottom left of the screen for Client Connect. a. This link will take you to the login screen
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) Explain the difference between navigation using visibility map and potential
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute (3 pts) Explain the difference between navigation using visibility map and potential
Infoblox and Ansible Integration
 DEPLOYMENT GUIDE Infoblox and Ansible Integration Ansible 2.5 April 2018 2018 Infoblox Inc. All rights reserved. Ansible Deployment Guide April 2018 Page 1 of 12 Contents Overview... 3 Introduction...
DEPLOYMENT GUIDE Infoblox and Ansible Integration Ansible 2.5 April 2018 2018 Infoblox Inc. All rights reserved. Ansible Deployment Guide April 2018 Page 1 of 12 Contents Overview... 3 Introduction...
Getting Started Guide AR10 Humanoid Robotic Hand. AR10 Hand 10 Degrees of Freedom Humanoid Hand
 Getting Started Guide AR10 Humanoid Robotic Hand AR10 Hand 10 Degrees of Freedom Humanoid Hand Getting Started Introduction The AR10 Robot Hand features 10 degrees of freedom (DOF) that are servo actuated
Getting Started Guide AR10 Humanoid Robotic Hand AR10 Hand 10 Degrees of Freedom Humanoid Hand Getting Started Introduction The AR10 Robot Hand features 10 degrees of freedom (DOF) that are servo actuated
Report, IDE1229 MASTER THESIS. A Mixed-Reality Platform for Robotics and Intelligent Vehicles
 Report, IDE1229 MASTER THESIS A Mixed-Reality Platform for Robotics and Intelligent Vehicles School of Information Science, Computer and Electrical Engineering Halmstad University - Sweden in Cooperation
Report, IDE1229 MASTER THESIS A Mixed-Reality Platform for Robotics and Intelligent Vehicles School of Information Science, Computer and Electrical Engineering Halmstad University - Sweden in Cooperation
Fetch Robotics. Release Indigo. Fetch Robotics Inc
 Fetch Robotics Release Indigo Fetch Robotics Inc December 19, 2017 CONTENTS 1 Introduction 3 1.1 Before you Start............................................. 3 2 Safety 5 2.1 Safety Overview.............................................
Fetch Robotics Release Indigo Fetch Robotics Inc December 19, 2017 CONTENTS 1 Introduction 3 1.1 Before you Start............................................. 3 2 Safety 5 2.1 Safety Overview.............................................
Robotics Introduction Matteo Matteucci
 Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
Robotics Introduction About me and my lectures 2 Lectures given by Matteo Matteucci +39 02 2399 3470 matteo.matteucci@polimi.it http://www.deib.polimi.it/ Research Topics Robotics and Autonomous Systems
Performance Evaluation of Augmented Teleoperation of Contact Manipulation Tasks
 STUDENT SUMMER INTERNSHIP TECHNICAL REPORT Performance Evaluation of Augmented Teleoperation of Contact Manipulation Tasks DOE-FIU SCIENCE & TECHNOLOGY WORKFORCE DEVELOPMENT PROGRAM Date submitted: September
STUDENT SUMMER INTERNSHIP TECHNICAL REPORT Performance Evaluation of Augmented Teleoperation of Contact Manipulation Tasks DOE-FIU SCIENCE & TECHNOLOGY WORKFORCE DEVELOPMENT PROGRAM Date submitted: September
Recitation 2 Introduction to Photoshop
 Recitation 2 Introduction to Photoshop What is Adobe Photoshop? Adobe Photoshop is a tool for creating digital graphics either by starting with a scanned photograph or artwork or by creating the graphics
Recitation 2 Introduction to Photoshop What is Adobe Photoshop? Adobe Photoshop is a tool for creating digital graphics either by starting with a scanned photograph or artwork or by creating the graphics
A Denunciation of the Monochrome:
 A Denunciation of the Monochrome: Displaying the colors using LED strips for different purposes. Tijani Oluwatimilehin, Christian Martinez, Sabrina Herrero, Erin Vines 1.1 Abstract The interaction between
A Denunciation of the Monochrome: Displaying the colors using LED strips for different purposes. Tijani Oluwatimilehin, Christian Martinez, Sabrina Herrero, Erin Vines 1.1 Abstract The interaction between
STEM SUMMER CAMP 2019
 STEM SUMMER CAMP 2019 Robo-Geek is a technology company founded by engineers to promote STEM, with the aim to foster students confidence and I Can do it attitude. Our staff consists of passionate engineers
STEM SUMMER CAMP 2019 Robo-Geek is a technology company founded by engineers to promote STEM, with the aim to foster students confidence and I Can do it attitude. Our staff consists of passionate engineers
ReVRSR: Remote Virtual Reality for Service Robots
 ReVRSR: Remote Virtual Reality for Service Robots Amel Hassan, Ahmed Ehab Gado, Faizan Muhammad March 17, 2018 Abstract This project aims to bring a service robot s perspective to a human user. We believe
ReVRSR: Remote Virtual Reality for Service Robots Amel Hassan, Ahmed Ehab Gado, Faizan Muhammad March 17, 2018 Abstract This project aims to bring a service robot s perspective to a human user. We believe
Development of a Low-Cost Education Platform: RoboMuse 4.0
 Development of a Low-Cost Education Platform: RoboMuse 4.0 Ayush Shukla shuklaayush247@gmail.com Muhammad Suhail National Institute of Technology Tiruchirappalli, India muhammadsuhail441@gmail.com Rishabjit
Development of a Low-Cost Education Platform: RoboMuse 4.0 Ayush Shukla shuklaayush247@gmail.com Muhammad Suhail National Institute of Technology Tiruchirappalli, India muhammadsuhail441@gmail.com Rishabjit
SonicCell. Using SonicCell with GarageBand. Workshop ÂØÒňÎ. Expandable Synthesizer Module and Audio Interface SCWS06 1
 ÂØÒňΠWorkshop SonicCell Expandable Synthesizer Module and Audio Interface Using SonicCell with GarageBand 2008 Roland Corporation U.S. All rights reserved. No part of this publication may be reproduced
ÂØÒňΠWorkshop SonicCell Expandable Synthesizer Module and Audio Interface Using SonicCell with GarageBand 2008 Roland Corporation U.S. All rights reserved. No part of this publication may be reproduced
ARS AUGMENTED REALITY SERIES
 REQUIRED HARDWARE This tutorial focuses on installing and calibrating the software, but doesn t cover the details of the hardware setup. (Note: Do not plug the Kinect or projector unit until instructed
REQUIRED HARDWARE This tutorial focuses on installing and calibrating the software, but doesn t cover the details of the hardware setup. (Note: Do not plug the Kinect or projector unit until instructed
AUTOMATION ACROSS THE ENTERPRISE
 AUTOMATION ACROSS THE ENTERPRISE WHAT WILL YOU LEARN? What is Ansible Tower How Ansible Tower Works Installing Ansible Tower Key Features WHAT IS ANSIBLE TOWER? Ansible Tower is a UI and RESTful API allowing
AUTOMATION ACROSS THE ENTERPRISE WHAT WILL YOU LEARN? What is Ansible Tower How Ansible Tower Works Installing Ansible Tower Key Features WHAT IS ANSIBLE TOWER? Ansible Tower is a UI and RESTful API allowing
CS 378: Autonomous Intelligent Robotics. Instructor: Jivko Sinapov
 CS 378: Autonomous Intelligent Robotics Instructor: Jivko Sinapov http://www.cs.utexas.edu/~jsinapov/teaching/cs378/ Readings for this week Maruyama, Shin, et al. "Change occurs when body meets environment:
CS 378: Autonomous Intelligent Robotics Instructor: Jivko Sinapov http://www.cs.utexas.edu/~jsinapov/teaching/cs378/ Readings for this week Maruyama, Shin, et al. "Change occurs when body meets environment:
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Turtlebot Laser Tag. Jason Grant, Joe Thompson {jgrant3, University of Notre Dame Notre Dame, IN 46556
 Turtlebot Laser Tag Turtlebot Laser Tag was a collaborative project between Team 1 and Team 7 to create an interactive and autonomous game of laser tag. Turtlebots communicated through a central ROS server
Turtlebot Laser Tag Turtlebot Laser Tag was a collaborative project between Team 1 and Team 7 to create an interactive and autonomous game of laser tag. Turtlebots communicated through a central ROS server
GESTURE BASED HUMAN MULTI-ROBOT INTERACTION. Gerard Canal, Cecilio Angulo, and Sergio Escalera
 GESTURE BASED HUMAN MULTI-ROBOT INTERACTION Gerard Canal, Cecilio Angulo, and Sergio Escalera Gesture based Human Multi-Robot Interaction Gerard Canal Camprodon 2/27 Introduction Nowadays robots are able
GESTURE BASED HUMAN MULTI-ROBOT INTERACTION Gerard Canal, Cecilio Angulo, and Sergio Escalera Gesture based Human Multi-Robot Interaction Gerard Canal Camprodon 2/27 Introduction Nowadays robots are able
Visual compass for the NIFTi robot
 CENTER FOR MACHINE PERCEPTION CZECH TECHNICAL UNIVERSITY IN PRAGUE Visual compass for the NIFTi robot Tomáš Nouza nouzato1@fel.cvut.cz June 27, 2013 TECHNICAL REPORT Available at https://cw.felk.cvut.cz/doku.php/misc/projects/nifti/sw/start/visual
CENTER FOR MACHINE PERCEPTION CZECH TECHNICAL UNIVERSITY IN PRAGUE Visual compass for the NIFTi robot Tomáš Nouza nouzato1@fel.cvut.cz June 27, 2013 TECHNICAL REPORT Available at https://cw.felk.cvut.cz/doku.php/misc/projects/nifti/sw/start/visual
Robot Operating System Ros The Complete Reference Volume 1 Studies In Computational Intelligence
 Robot Operating System Ros The Complete Reference Volume 1 Studies In Computational Intelligence We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks
Robot Operating System Ros The Complete Reference Volume 1 Studies In Computational Intelligence We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks
Evolution of the robotic control frameworks at INRIA Rhône-Alpes
 Evolution of the robotic control frameworks at INRIA Rhône-Alpes S. Arias J. Lahera-Perez A. Nègre N. Turro May 11, 2011 Abstract Intense efforts have been carried out in the last decades to define and
Evolution of the robotic control frameworks at INRIA Rhône-Alpes S. Arias J. Lahera-Perez A. Nègre N. Turro May 11, 2011 Abstract Intense efforts have been carried out in the last decades to define and
dspace and Real-Time Interface in Simulink
 dspace and Real-Time Interface in Simulink Azad Ghaffari San Diego State University Department of ECE San Diego CA 92182-1309 12/20/2012 This document provides a tutorial introduction to the dspace software
dspace and Real-Time Interface in Simulink Azad Ghaffari San Diego State University Department of ECE San Diego CA 92182-1309 12/20/2012 This document provides a tutorial introduction to the dspace software
Outernet L-band for Linux Documentation
 Outernet L-band for Linux Documentation Release 1.0a7 Outernet Inc February 04, 2017 Contents 1 Licenses 3 2 Guide contents 5 2.1 Requirements...............................................
Outernet L-band for Linux Documentation Release 1.0a7 Outernet Inc February 04, 2017 Contents 1 Licenses 3 2 Guide contents 5 2.1 Requirements...............................................
Meet Cue. USER PROGRAMMABLE LEDS & BUTTONS Customizes your experience.
 Starter Guide Meet Cue Cue is a clever and powerful robot that is full of personality. Four unique hero avatars allow you to choose the robot personality you prefer. Give Cue more advanced capabilities
Starter Guide Meet Cue Cue is a clever and powerful robot that is full of personality. Four unique hero avatars allow you to choose the robot personality you prefer. Give Cue more advanced capabilities
Multi-robot Control via Smart Phone and Navigation in Robot Operating System
 PROBLEMY MECHATRONIKI UZBROJENIE, LOTNICTWO, INŻYNIERIA BEZPIECZEŃSTWA ISSN 2081-5891 8, 4 (30), 2017, 37-46 PROBLEMS OF MECHATRONICS ARMAMENT, AVIATION, SAFETY ENGINEERING Multi-robot Control via Smart
PROBLEMY MECHATRONIKI UZBROJENIE, LOTNICTWO, INŻYNIERIA BEZPIECZEŃSTWA ISSN 2081-5891 8, 4 (30), 2017, 37-46 PROBLEMS OF MECHATRONICS ARMAMENT, AVIATION, SAFETY ENGINEERING Multi-robot Control via Smart
Robo$cs Introduc$on. ROS Workshop. Faculty of Informa$on Technology, Brno University of Technology Bozetechova 2, Brno
 Robo$cs Introduc$on ROS Workshop Faculty of Informa$on Technology, Brno University of Technology Bozetechova 2, 612 66 Brno name@fit.vutbr.cz What is a Robot? a programmable, mul.func.on manipulator USA
Robo$cs Introduc$on ROS Workshop Faculty of Informa$on Technology, Brno University of Technology Bozetechova 2, 612 66 Brno name@fit.vutbr.cz What is a Robot? a programmable, mul.func.on manipulator USA
IRU151_IRU152. OPC UA User Manual
 IRU151_IRU152 OPC UA User Manual Revision History Version Revision Date Author Description 1.0 2018/07/18 Ryan 1 st release ii Table of Contents Revision History... i CHAPTER 1 Introduction...1 CHAPTER
IRU151_IRU152 OPC UA User Manual Revision History Version Revision Date Author Description 1.0 2018/07/18 Ryan 1 st release ii Table of Contents Revision History... i CHAPTER 1 Introduction...1 CHAPTER
Application Note. Communication between arduino and IMU Software capturing the data
 Application Note Communication between arduino and IMU Software capturing the data ECE 480 Team 8 Chenli Yuan Presentation Prep Date: April 8, 2013 Executive Summary In summary, this application note is
Application Note Communication between arduino and IMU Software capturing the data ECE 480 Team 8 Chenli Yuan Presentation Prep Date: April 8, 2013 Executive Summary In summary, this application note is
MOBILE ROBOTICS SOFTWARE REVIEWS
 MOBILE ROBOTICS SOFTWARE REVIEWS Dr. K.R. Prakash * Mr. Lakshmikantha K.S Mr. Rakesh M Dept. of Mechanical Engineering Dept. of Mechanical Engineering Dept. of Mechanical Engineering Ramya M.P Student
MOBILE ROBOTICS SOFTWARE REVIEWS Dr. K.R. Prakash * Mr. Lakshmikantha K.S Mr. Rakesh M Dept. of Mechanical Engineering Dept. of Mechanical Engineering Dept. of Mechanical Engineering Ramya M.P Student
Vision Based Fuzzy Control Autonomous Landing with UAVs: From V-REP to Real Experiments
 Vision Based Fuzzy Control Autonomous Landing with UAVs: From V-REP to Real Experiments Miguel A. Olivares-Mendez and Somasundar Kannan and Holger Voos Abstract This paper is focused on the design of a
Vision Based Fuzzy Control Autonomous Landing with UAVs: From V-REP to Real Experiments Miguel A. Olivares-Mendez and Somasundar Kannan and Holger Voos Abstract This paper is focused on the design of a
Scanner Utility for Microsoft Windows Version 9.6. User's Guide
 P3PC-E892-03EN Scanner Utility for Microsoft Windows Version 9.6 User's Guide For Use with Microsoft Windows 98, Windows Me, Windows 2000 and Windows XP Introduction Thank you for purchasing the "Scanner
P3PC-E892-03EN Scanner Utility for Microsoft Windows Version 9.6 User's Guide For Use with Microsoft Windows 98, Windows Me, Windows 2000 and Windows XP Introduction Thank you for purchasing the "Scanner
Construction of Mobile Robots
 Construction of Mobile Robots 716.091 Institute for Software Technology 1 Previous Years Conference Robot https://www.youtube.com/watch?v=wu7zyzja89i Breakfast Robot https://youtu.be/dtoqiklqcug 2 This
Construction of Mobile Robots 716.091 Institute for Software Technology 1 Previous Years Conference Robot https://www.youtube.com/watch?v=wu7zyzja89i Breakfast Robot https://youtu.be/dtoqiklqcug 2 This
Downloading a ROBOTC Sample Program
 Downloading a ROBOTC Sample Program This document is a guide for downloading and running programs on the VEX Cortex using ROBOTC for Cortex 2.3 BETA. It is broken into four sections: Prerequisites, Downloading
Downloading a ROBOTC Sample Program This document is a guide for downloading and running programs on the VEX Cortex using ROBOTC for Cortex 2.3 BETA. It is broken into four sections: Prerequisites, Downloading
User Guide / Rules (v1.6)
") BLACKJACK MULTI HAND User Guide / Rules (v1.6) 1. OVERVIEW You play our Blackjack game against a dealer. The dealer has eight decks of cards, all mixed together. The purpose of Blackjack is to have a hand
BLACKJACK MULTI HAND User Guide / Rules (v1.6) 1. OVERVIEW You play our Blackjack game against a dealer. The dealer has eight decks of cards, all mixed together. The purpose of Blackjack is to have a hand
Design Lab Fall 2011 Controlling Robots
 Design Lab 2 6.01 Fall 2011 Controlling Robots Goals: Experiment with state machines controlling real machines Investigate real-world distance sensors on 6.01 robots: sonars Build and demonstrate a state
Design Lab 2 6.01 Fall 2011 Controlling Robots Goals: Experiment with state machines controlling real machines Investigate real-world distance sensors on 6.01 robots: sonars Build and demonstrate a state
Human-Robot Interaction for Remote Application
 Human-Robot Interaction for Remote Application MS. Hendriyawan Achmad Universitas Teknologi Yogyakarta, Jalan Ringroad Utara, Jombor, Sleman 55285, INDONESIA Gigih Priyandoko Faculty of Mechanical Engineering
Human-Robot Interaction for Remote Application MS. Hendriyawan Achmad Universitas Teknologi Yogyakarta, Jalan Ringroad Utara, Jombor, Sleman 55285, INDONESIA Gigih Priyandoko Faculty of Mechanical Engineering
Benthic Photo Survey Documentation
 Benthic Photo Survey Documentation Release 1.0.1 Jared Kibele December 18, 2014 Contents 1 Contents 3 1.1 Introduction............................................... 3 1.2 Installation................................................
Benthic Photo Survey Documentation Release 1.0.1 Jared Kibele December 18, 2014 Contents 1 Contents 3 1.1 Introduction............................................... 3 1.2 Installation................................................
ME 597/780 AUTONOMOUS MOBILE ROBOTICS SECTION 1: INTRODUCTION
 ME 597/780 AUTONOMOUS MOBILE ROBOTICS SECTION 1: INTRODUCTION Prof. Steven Waslander SYLLABUS Contact Info: Prof. Steven Waslander E3X-4118 (519) 888-4567 x32205 stevenw@uwaterloo.ca Michael Smart E5-3012
ME 597/780 AUTONOMOUS MOBILE ROBOTICS SECTION 1: INTRODUCTION Prof. Steven Waslander SYLLABUS Contact Info: Prof. Steven Waslander E3X-4118 (519) 888-4567 x32205 stevenw@uwaterloo.ca Michael Smart E5-3012
Simulink Support for VEX Cortex BEST Robotics Sandeep Hiremath
 Simulink Support for VEX Cortex BEST Robotics 2012 Sandeep Hiremath 1 I was on the road and could provide my comments only this WebEx Chat 2 Outline Intro to Simulink Simulink software support for VEX
Simulink Support for VEX Cortex BEST Robotics 2012 Sandeep Hiremath 1 I was on the road and could provide my comments only this WebEx Chat 2 Outline Intro to Simulink Simulink software support for VEX
ZX Distance and Gesture Sensor Hookup Guide
 Page 1 of 13 ZX Distance and Gesture Sensor Hookup Guide Introduction The ZX Distance and Gesture Sensor is a collaboration product with XYZ Interactive. The very smart people at XYZ Interactive have created
Page 1 of 13 ZX Distance and Gesture Sensor Hookup Guide Introduction The ZX Distance and Gesture Sensor is a collaboration product with XYZ Interactive. The very smart people at XYZ Interactive have created
DESIGN OF AN IMAGE PROCESSING ALGORITHM FOR BALL DETECTION
 DESIGN OF AN IMAGE PROCESSING ALGORITHM FOR BALL DETECTION Ikwuagwu Emole B.S. Computer Engineering 11 Claflin University Mentor: Chad Jenkins, Ph.D Robotics, Learning and Autonomy Lab Department of Computer
DESIGN OF AN IMAGE PROCESSING ALGORITHM FOR BALL DETECTION Ikwuagwu Emole B.S. Computer Engineering 11 Claflin University Mentor: Chad Jenkins, Ph.D Robotics, Learning and Autonomy Lab Department of Computer
FUJITSU TWAIN 32 Scanner Driver. Scanner Utility for Microsoft Windows Version User's Guide
 P3PC- E417-02EN FUJITSU TWAIN 32 Scanner Driver Scanner Utility for Microsoft Windows Version 9.10 User's Guide For Use with Microsoft Windows 98, Windows Me, Windows 2000 and Windows XP Introduction
P3PC- E417-02EN FUJITSU TWAIN 32 Scanner Driver Scanner Utility for Microsoft Windows Version 9.10 User's Guide For Use with Microsoft Windows 98, Windows Me, Windows 2000 and Windows XP Introduction
Version: 2.0 Date: 5/31/ :07:00 AM
 Weavefuture Coin Op Internet Café Kiosk System 2.0 Version: 2.0 Date: 5/31/2007 12:07:00 AM Table of Contents 1 WEAVEFUTURE COIN OP INTERNET CAFÉ KIOSK SYSTEM COMPOSITION... 3 2 WEAVEFUTURE COIN ACCEPTOR
Weavefuture Coin Op Internet Café Kiosk System 2.0 Version: 2.0 Date: 5/31/2007 12:07:00 AM Table of Contents 1 WEAVEFUTURE COIN OP INTERNET CAFÉ KIOSK SYSTEM COMPOSITION... 3 2 WEAVEFUTURE COIN ACCEPTOR
RoboyXylophoneRecording Documentation. Arash, Ludwig, Yupei
 RoboyXylophoneRecording Documentation Arash, Ludwig, Yupei Sep 16, 2018 Contents 1 Introduction 1 1.1 What is Xylophone Recording?..................................... 1 2 Getting Started 3 2.1 Installation................................................
RoboyXylophoneRecording Documentation Arash, Ludwig, Yupei Sep 16, 2018 Contents 1 Introduction 1 1.1 What is Xylophone Recording?..................................... 1 2 Getting Started 3 2.1 Installation................................................
Welcome to Storyist. The Novel Template This template provides a starting point for a novel manuscript and includes:
 Welcome to Storyist Storyist is a powerful writing environment for ipad that lets you create, revise, and review your work wherever inspiration strikes. Creating a New Project When you first launch Storyist,
Welcome to Storyist Storyist is a powerful writing environment for ipad that lets you create, revise, and review your work wherever inspiration strikes. Creating a New Project When you first launch Storyist,
Robots are similar to humans if you consider that both use inputs and outputs to sense and react to the world.
 Activity 3.1.1 Inputs and Outputs for CT Introduction Robots are similar to humans if you consider that both use inputs and outputs to sense and react to the world. Most humans use five senses to perceive
Activity 3.1.1 Inputs and Outputs for CT Introduction Robots are similar to humans if you consider that both use inputs and outputs to sense and react to the world. Most humans use five senses to perceive
3 USRP2 Hardware Implementation
 3 USRP2 Hardware Implementation This section of the laboratory will familiarize you with some of the useful GNURadio tools for digital communication system design via SDR using the USRP2 platforms. Specifically,
3 USRP2 Hardware Implementation This section of the laboratory will familiarize you with some of the useful GNURadio tools for digital communication system design via SDR using the USRP2 platforms. Specifically,
First Steps in Unity3D
 First Steps in Unity3D The Carousel 1. Getting Started With Unity 1.1. Once Unity is open select File->Open Project. 1.2. In the Browser navigate to the location where you have the Project folder and load
First Steps in Unity3D The Carousel 1. Getting Started With Unity 1.1. Once Unity is open select File->Open Project. 1.2. In the Browser navigate to the location where you have the Project folder and load
Congratulations on your decision to purchase the Triquetra Auto Zero Touch Plate for All Three Axis.
 Congratulations on your decision to purchase the Triquetra Auto Zero Touch Plate for All Three Axis. This user guide along with the videos included on the CD should have you on your way to perfect zero
Congratulations on your decision to purchase the Triquetra Auto Zero Touch Plate for All Three Axis. This user guide along with the videos included on the CD should have you on your way to perfect zero
TRDB_DC2 TRDB_DC2. 1.3Mega Pixel Digital Camera Development Kit
 Terasic TRDB_DC2 Digital Camera Package TRDB_DC2 1.3Mega Pixel Digital Camera Development Kit Frame grabber with VGA display reference design For Altera DE2 and Terasic T-Rex C1 Boards TRDB_DC2 Document
Terasic TRDB_DC2 Digital Camera Package TRDB_DC2 1.3Mega Pixel Digital Camera Development Kit Frame grabber with VGA display reference design For Altera DE2 and Terasic T-Rex C1 Boards TRDB_DC2 Document
League <BART LAB AssistBot (THAILAND)>
>") RoboCup@Home League 2013 Jackrit Suthakorn, Ph.D.*, Woratit Onprasert, Sakol Nakdhamabhorn, Rachot Phuengsuk, Yuttana Itsarachaiyot, Choladawan Moonjaita, Syed Saqib Hussain
RoboCup@Home League 2013 Jackrit Suthakorn, Ph.D.*, Woratit Onprasert, Sakol Nakdhamabhorn, Rachot Phuengsuk, Yuttana Itsarachaiyot, Choladawan Moonjaita, Syed Saqib Hussain
VR-Plugin. for Autodesk Maya.
 VR-Plugin for Autodesk Maya 1 1 1. Licensing process Licensing... 3 2 2. Quick start Quick start... 4 3 3. Rendering Rendering... 10 4 4. Optimize performance Optimize performance... 11 5 5. Troubleshooting
VR-Plugin for Autodesk Maya 1 1 1. Licensing process Licensing... 3 2 2. Quick start Quick start... 4 3 3. Rendering Rendering... 10 4 4. Optimize performance Optimize performance... 11 5 5. Troubleshooting
Release Notes v KINOVA Gen3 Ultra lightweight robot enabled by KINOVA KORTEX
 Release Notes v1.1.4 KINOVA Gen3 Ultra lightweight robot enabled by KINOVA KORTEX Contents Overview 3 System Requirements 3 Release Notes 4 v1.1.4 4 Release date 4 Software / firmware components release
Release Notes v1.1.4 KINOVA Gen3 Ultra lightweight robot enabled by KINOVA KORTEX Contents Overview 3 System Requirements 3 Release Notes 4 v1.1.4 4 Release date 4 Software / firmware components release
EITN90 Radar and Remote Sensing Lab 2
 EITN90 Radar and Remote Sensing Lab 2 February 8, 2018 1 Learning outcomes This lab demonstrates the basic operation of a frequency modulated continuous wave (FMCW) radar, capable of range and velocity
EITN90 Radar and Remote Sensing Lab 2 February 8, 2018 1 Learning outcomes This lab demonstrates the basic operation of a frequency modulated continuous wave (FMCW) radar, capable of range and velocity
Adafruit 16 Channel Servo Driver with Raspberry Pi
 Adafruit 16 Channel Servo Driver with Raspberry Pi Created by Kevin Townsend Last updated on 2014-04-17 09:15:51 PM EDT Guide Contents Guide Contents Overview What you'll need Configuring Your Pi for I2C
Adafruit 16 Channel Servo Driver with Raspberry Pi Created by Kevin Townsend Last updated on 2014-04-17 09:15:51 PM EDT Guide Contents Guide Contents Overview What you'll need Configuring Your Pi for I2C
PR2 HEAD AND HAND MANIPULATION THROUGH TELE-OPERATION
 PR2 HEAD AND HAND MANIPULATION THROUGH TELE-OPERATION Using an Attitude and Heading Reference System Jason Allen, SUNFEST (EE), University of the District of Columbia Advisor: Dr. Camillo J. Taylor A Brief
PR2 HEAD AND HAND MANIPULATION THROUGH TELE-OPERATION Using an Attitude and Heading Reference System Jason Allen, SUNFEST (EE), University of the District of Columbia Advisor: Dr. Camillo J. Taylor A Brief
EVOS M5000 Imaging System
 EVOS M5000 Imaging System Pub. No. MAN0017765 Doc. Part No. 710209 Rev. A.0 This document is intended as a benchtop reference for the users of the EVOS M5000 Imaging System (Cat. No. AMF5000). For detailed
EVOS M5000 Imaging System Pub. No. MAN0017765 Doc. Part No. 710209 Rev. A.0 This document is intended as a benchtop reference for the users of the EVOS M5000 Imaging System (Cat. No. AMF5000). For detailed
Open Loop Frequency Response
 TAKE HOME LABS OKLAHOMA STATE UNIVERSITY Open Loop Frequency Response by Carion Pelton 1 OBJECTIVE This experiment will reinforce your understanding of the concept of frequency response. As part of the
TAKE HOME LABS OKLAHOMA STATE UNIVERSITY Open Loop Frequency Response by Carion Pelton 1 OBJECTIVE This experiment will reinforce your understanding of the concept of frequency response. As part of the
ECE 497 Introduction to Mobile Robotics Spring 09-10
 Lab 1 Getting to Know Your Robot: Locomotion and Odometry (Demonstration due in class on Thursday) (Code and Memo due in Angel drop box by midnight on Thursday) Read this entire lab procedure and complete
Lab 1 Getting to Know Your Robot: Locomotion and Odometry (Demonstration due in class on Thursday) (Code and Memo due in Angel drop box by midnight on Thursday) Read this entire lab procedure and complete
Anki Documentation. Jennifer and Soren Bjornstad Contact: November 20, 2011
 Anki Documentation Jennifer and Soren Bjornstad Contact: jennifer.bjornstad@valpo.edu November 20, 2011 Contents 1 About Spaced Repetition 3 2 Installing Anki 3 3 Adding Content 3 3.1 Downloading a Shared
Anki Documentation Jennifer and Soren Bjornstad Contact: jennifer.bjornstad@valpo.edu November 20, 2011 Contents 1 About Spaced Repetition 3 2 Installing Anki 3 3 Adding Content 3 3.1 Downloading a Shared
3D Projected Imagery Freespace Control Unit (PIFCU): Design, Implementation, and Analysis
: Design, Implementation, and Analysis") 3D Projected Imagery Freespace Control Unit (PIFCU): Design, Implementation, and Analysis Holly Tina Ferguson Department of Computer Science & Engineering MI 2012-2013 Advisor: Dr. Stephen Turner 11/11/2013
3D Projected Imagery Freespace Control Unit (PIFCU): Design, Implementation, and Analysis Holly Tina Ferguson Department of Computer Science & Engineering MI 2012-2013 Advisor: Dr. Stephen Turner 11/11/2013
LAUNCHPAD. Getting Started Guide
 LAUNCHPAD Getting Started Guide Overview Launchpad Thank you for buying Launchpad, the iconic grid instrument for Ableton Live. You re now part of the evolution in the creation of electronic music! The
LAUNCHPAD Getting Started Guide Overview Launchpad Thank you for buying Launchpad, the iconic grid instrument for Ableton Live. You re now part of the evolution in the creation of electronic music! The
INSTRUCTIONS. 3DR Plane CONTENTS. Thank you for purchasing a 3DR Plane!
 DR Plane INSTRUCTIONS Thank you for purchasing a DR Plane! CONTENTS 1 1 Fuselage Right wing Left wing Horizontal stabilizer Vertical stabilizer Carbon fiber bar 1 1 1 7 8 10 11 1 Audio/video (AV) cable
DR Plane INSTRUCTIONS Thank you for purchasing a DR Plane! CONTENTS 1 1 Fuselage Right wing Left wing Horizontal stabilizer Vertical stabilizer Carbon fiber bar 1 1 1 7 8 10 11 1 Audio/video (AV) cable
Robot Autonomy Project Final Report Multi-Robot Motion Planning In Tight Spaces
 16-662 Robot Autonomy Project Final Report Multi-Robot Motion Planning In Tight Spaces Aum Jadhav The Robotics Institute Carnegie Mellon University Pittsburgh, PA 15213 ajadhav@andrew.cmu.edu Kazu Otani
16-662 Robot Autonomy Project Final Report Multi-Robot Motion Planning In Tight Spaces Aum Jadhav The Robotics Institute Carnegie Mellon University Pittsburgh, PA 15213 ajadhav@andrew.cmu.edu Kazu Otani
Transferring Deep Reinforcement Learning from a Game Engine Simulation for Robots
 Transferring Deep Reinforcement Learning from a Game Engine Simulation for Robots Christoffer Bredo Lillelund Msc in Medialogy Aalborg University CPH Clille13@student.aau.dk May 2018 Abstract Simulations
Transferring Deep Reinforcement Learning from a Game Engine Simulation for Robots Christoffer Bredo Lillelund Msc in Medialogy Aalborg University CPH Clille13@student.aau.dk May 2018 Abstract Simulations
Emergency Stop Final Project
 Emergency Stop Final Project Jeremy Cook and Jessie Chen May 2017 1 Abstract Autonomous robots are not fully autonomous yet, and it should be expected that they could fail at any moment. Given the validity
Emergency Stop Final Project Jeremy Cook and Jessie Chen May 2017 1 Abstract Autonomous robots are not fully autonomous yet, and it should be expected that they could fail at any moment. Given the validity
Lab 7: Introduction to Webots and Sensor Modeling
 Lab 7: Introduction to Webots and Sensor Modeling This laboratory requires the following software: Webots simulator C development tools (gcc, make, etc.) The laboratory duration is approximately two hours.
Lab 7: Introduction to Webots and Sensor Modeling This laboratory requires the following software: Webots simulator C development tools (gcc, make, etc.) The laboratory duration is approximately two hours.
EE-110 Introduction to Engineering & Laboratory Experience Saeid Rahimi, Ph.D. Labs Introduction to Arduino
 EE-110 Introduction to Engineering & Laboratory Experience Saeid Rahimi, Ph.D. Labs 10-11 Introduction to Arduino In this lab we will introduce the idea of using a microcontroller as a tool for controlling
EE-110 Introduction to Engineering & Laboratory Experience Saeid Rahimi, Ph.D. Labs 10-11 Introduction to Arduino In this lab we will introduce the idea of using a microcontroller as a tool for controlling
Lab 1: Testing and Measurement on the r-one
 Lab 1: Testing and Measurement on the r-one Note: This lab is not graded. However, we will discuss the results in class, and think just how embarrassing it will be for me to call on you and you don t have
Lab 1: Testing and Measurement on the r-one Note: This lab is not graded. However, we will discuss the results in class, and think just how embarrassing it will be for me to call on you and you don t have
PWM Guide: Zen Buzzer and Tri-Colour LEDs For Linux Kernel 4.1+ Table of Contents. by Brian Fraser Last update: November 17, 2017
 PWM Guide: Zen Buzzer and Tri-Colour LEDs For Linux Kernel 4.1+ by Brian Fraser Last update: November 17, 2017 This document guides the user through: 1. Driving the Zen cape's buzzer via PWM from a Linux
PWM Guide: Zen Buzzer and Tri-Colour LEDs For Linux Kernel 4.1+ by Brian Fraser Last update: November 17, 2017 This document guides the user through: 1. Driving the Zen cape's buzzer via PWM from a Linux
ROS Based Multi-sensor Navigation of Intelligent Wheelchair
 2013 Fourth International Conference on Emerging Security Technologies ROS Based Multi-sensor Navigation of Intelligent Wheelchair Ruijiao Li, Mohammadreza A. Oskoei, Klaus D. McDonald-Maier, Huosheng
2013 Fourth International Conference on Emerging Security Technologies ROS Based Multi-sensor Navigation of Intelligent Wheelchair Ruijiao Li, Mohammadreza A. Oskoei, Klaus D. McDonald-Maier, Huosheng
Robotic manipulator capable of sorting moving objects alongside human workers using a budget-conscious control system
 Robotic manipulator capable of sorting moving objects alongside human workers using a budget-conscious control system Adela Wee *, Christopher Willis, Victoria Coleman, Trevor Hooton, Andrew Bennett* Intelligent
Robotic manipulator capable of sorting moving objects alongside human workers using a budget-conscious control system Adela Wee *, Christopher Willis, Victoria Coleman, Trevor Hooton, Andrew Bennett* Intelligent
Multi-Robot Frontier Based Map Coverage Using the ROS Environment. Brian Pappas
 Multi-Robot Frontier Based Map Coverage Using the ROS Environment by Brian Pappas A thesis submitted to the Graduate Faculty of Auburn University in partial fulfillment of the requirements for the Degree
Multi-Robot Frontier Based Map Coverage Using the ROS Environment by Brian Pappas A thesis submitted to the Graduate Faculty of Auburn University in partial fulfillment of the requirements for the Degree
Contents. Introduction
 Contents Introduction 1. Overview 1-1. Glossary 8 1-2. Menus 11 File Menu 11 Edit Menu 15 Image Menu 19 Layer Menu 20 Select Menu 23 Filter Menu 25 View Menu 26 Window Menu 27 1-3. Tool Bar 28 Selection
Contents Introduction 1. Overview 1-1. Glossary 8 1-2. Menus 11 File Menu 11 Edit Menu 15 Image Menu 19 Layer Menu 20 Select Menu 23 Filter Menu 25 View Menu 26 Window Menu 27 1-3. Tool Bar 28 Selection
CS 378: Autonomous Intelligent Robotics. Instructor: Jivko Sinapov
 CS 378: Autonomous Intelligent Robotics Instructor: Jivko Sinapov http://www.cs.utexas.edu/~jsinapov/teaching/cs378/ Announcements FRI Summer Research Fellowships: https://cns.utexas.edu/fri/beyond-the-freshman-lab/fellowships
CS 378: Autonomous Intelligent Robotics Instructor: Jivko Sinapov http://www.cs.utexas.edu/~jsinapov/teaching/cs378/ Announcements FRI Summer Research Fellowships: https://cns.utexas.edu/fri/beyond-the-freshman-lab/fellowships
Brightness and Contrast Control Reference Guide
 innovation Series Scanners Brightness and Contrast Control Reference Guide A-61506 Part No. 9E3722 CAT No. 137 0337 Using the Brightness and Contrast Control This Reference Guide provides information and
innovation Series Scanners Brightness and Contrast Control Reference Guide A-61506 Part No. 9E3722 CAT No. 137 0337 Using the Brightness and Contrast Control This Reference Guide provides information and
Robotics Engineering DoDEA Career Technology Education Robot Programming
 Robotics Engineering DoDEA Career Technology Education Robot Programming Area Competency G. Robot Programming 1. Introduction to Robot Programming ( / / ) ( / / ) Before you get started, print out this
Robotics Engineering DoDEA Career Technology Education Robot Programming Area Competency G. Robot Programming 1. Introduction to Robot Programming ( / / ) ( / / ) Before you get started, print out this
Basics of Error Correcting Codes
 Basics of Error Correcting Codes Drawing from the book Information Theory, Inference, and Learning Algorithms Downloadable or purchasable: http://www.inference.phy.cam.ac.uk/mackay/itila/book.html CSE
Basics of Error Correcting Codes Drawing from the book Information Theory, Inference, and Learning Algorithms Downloadable or purchasable: http://www.inference.phy.cam.ac.uk/mackay/itila/book.html CSE
EE 461 Experiment #1 Digital Control of DC Servomotor
 EE 461 Experiment #1 Digital Control of DC Servomotor 1 Objectives The objective of this lab is to introduce to the students the design and implementation of digital control. The digital control is implemented
EE 461 Experiment #1 Digital Control of DC Servomotor 1 Objectives The objective of this lab is to introduce to the students the design and implementation of digital control. The digital control is implemented