Swarm Robotics. Clustering and Sorting
|
|
|
- Conrad Short
- 5 years ago
- Views:
Transcription
1 Swarm Robotics Clustering and Sorting By Andrew Vardy Associate Professor Computer Science / Engineering Memorial University of Newfoundland St. John s, Canada
2 Deneubourg JL, Goss S, Franks N, Sendova-Franks A, Detrain C, Chrétien L (1990) The dynamics of collective sorting robot-like ants and ant-like robots. In: First Int. Conf. on the Simulation of Adaptive Behaviour, pp
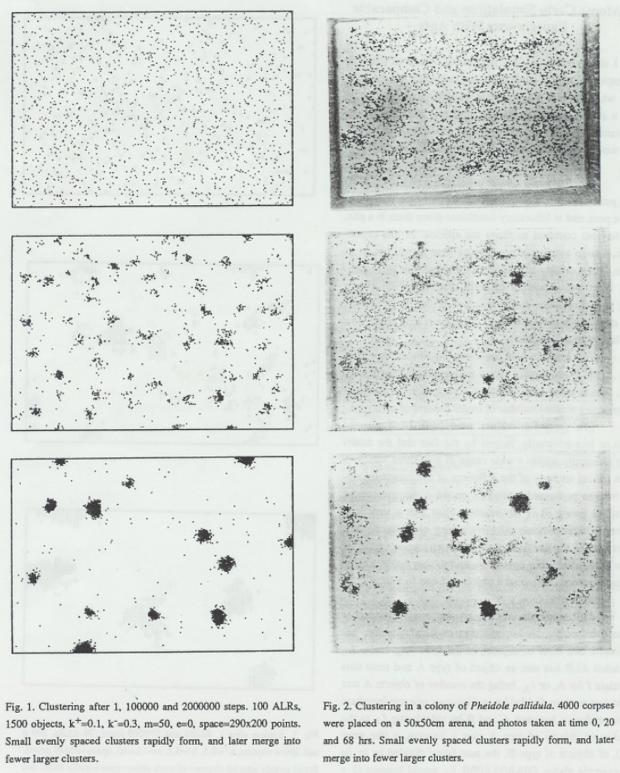
3 Deneubourg et al (1990) Inspired by observations of ant behaviours that create global order through local action Dead ants moved into cemetery clusters that aggregate over time Nest contents organized into distinct piles Deneubourg et al s model: Agents walk randomly and pick-up or
4 Agents measure density by maintaining a short-term memory and counting the number of recent object appearances
5
6 Clustering and Sorting Clustering: One object type Sorting: More than one object type Objects can be organized in different ways: e.g. concentric rings or patches We focus on patch sorting: Grouping two or more classes of objects so that each is both clustered and segregated, and each lies outside the boundary of the other (Melhuish et al, 1998)
7 This shows the extension of Deneubourg s model to handle multiple object types (i.e. sorting)
8 Beckers R, Holland O, Deneubourg JL (1994) From local actions to global tasks: Stigmergy and collective robotics. In: Brooks R, Maes P (eds) Artificial Life IV, pp
 model, but the pick-up / deposit behaviour")
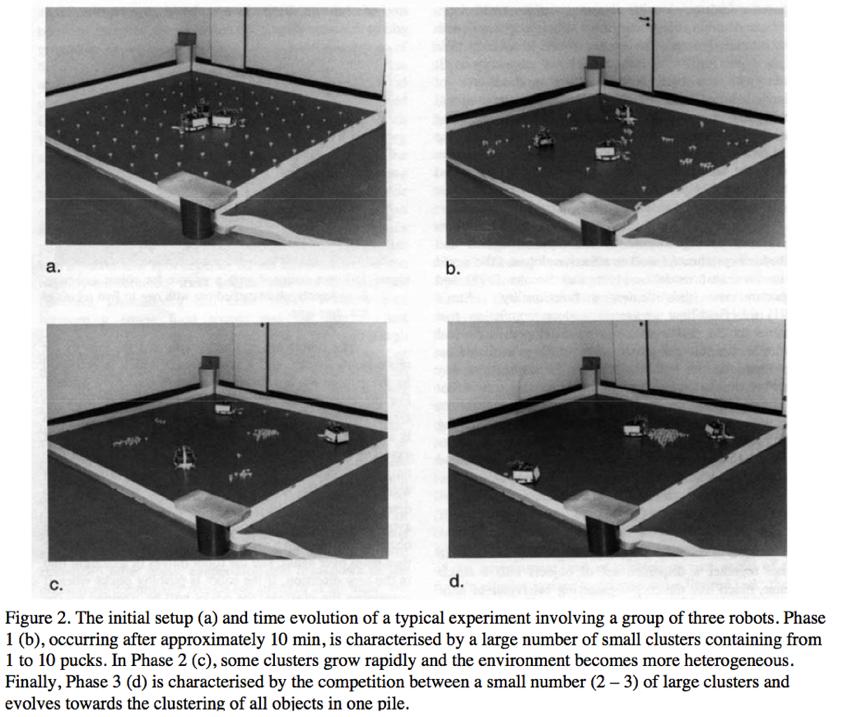
9 Beckers et al (1994) Beckers, Holland, and Deneubourg (BHD) wrote a paper detailing their experiments in swarm robotic clustering Robots in the BHD experiment act according to the Deneubourg et al (1990) model, but the pick-up / deposit behaviour is implicit
10 C-shaped gripper passively collects pucks Sensors and behaviours: Infrared sensors to detect obstacles (walls, other robots) Behaviour: Triggers random turn away from obstacle Microswitch attached to gripper detects that gripper is pushing against three or more pucks Behaviour: Triggers backup, then a random turn, resulting in the pucks being left behind (i.e. deposited) If no behaviour is triggered, the robot just moves straight
11
12 Vardy A, Vorobyev G, Banzhaf W (2014) Cache Consensus: Rapid Object Sorting by a Robotic Swarm. Swarm Intelligence, volume 8, pp 61-87
13 Motivation: Why Study Clustering and Sorting Modelling of sorting and clustering behaviours in nature Possible applications: Cleaning (aggregating waste material) Recycling
14 The Assumption of Extreme Simplicity Several other researchers have pursued further developments on the idealized model of Deneubourg et al (1990) or BHD (1994) under the following assumptions: Agents are extremely simplistic with no long-term memory, no capacity for navigation, and a lack of reaction to distal stimuli It has become evident that insects such as ants and bees do not share these limitations
15 Using Vision Deneubourg s et al s model and related variants (e.g. BHD) exhibit random motion and a perceptual radius of zero The events of interest (pick-ups and deposits) happen by chance The robot s view of nearby pucks can be processed to yield a list of clusters of each type We can also determine the type of the carried puck
 with for ward-facing fisheye cameras and passive grippers, suitable for carrying (and viewing) one puck angle lens to")
 Two of our modified SRV-1 robots in operation. Views from robot 116 are presented in Figure 2(a).")
16 (a) (b) Modified SRV-1 robots (12.5 x 10.8 cm) with for ward-facing fisheye cameras and passive grippers, suitable for carrying (and viewing) one puck angle lens to maximize their field of view. Pixels in the image are classified by their Fig. 1 (a) Two of our modified SRV-1 robots in operation. Views from robot 116 are presented in Figure 2(a). (b) The underside of the robot s housing, showing the shape of the passive gripper. colour as obstacles (black), pucks (red, green, etc...), or other robots (blue). After
17 Cache Consensus: Rapid Object Sorting by a Robotic Swarm (a) Input Image Colour Segmented 7 Local Map: Pucks: Connected blobs of similar coloured pixels Clusters: Sets of nearby pucks with inter-puck distances below a threshold. A puck (b)is in a cluster if it is close enough to any other puck in the cluster. Fig. 2 This figure shows the view fromby one of our SRV-1 robots (a) and a simulated robot Homogeneous definition b). In (a) the robot s raw view, colour segmented image, and local map are shown from
18 New Algorithm: ProbSeek We can now react to clusters based on their size using the following heuristics: If carrying puck Consider depositing at the largest matching cluster in view If not carrying puck Consider collecting a puck from the smallest cluster in view Consider means apply a probabilistic decision rule based on the candidate cluster s size
19 The robot is not carrying a puck It would consider selecting the solitary red puck as a pick-up target If carrying a red puck, it would consider the cluster of two red pucks as a deposit target Possible results of the pick-up/deposit
20 Technical Details FSM for ProbSeek Algorithm Lost_target Timeout Start Target_acquired Timeout Puck_carried_(unexpected) Puck_carried Timeout Puck_lost_(unexpected) Target_aquired Cluster_contacted Puck_lost_(unexpected) Lost_target
21 ProbSeek Demo
22 Localization ProbSeek provides a significant improvement in sorting performance but maintains no memory of past clusters The ability to return to significant places in the environment can be achieved in many ways: Visual homing Map-based localization Cheating (e.g. GPS, overhead camera)
23 New Algorithm: CacheCons CacheCons is based on ProbSeek with the following main modifications: Cache Points are maintained to represent the largest clusters seen When a puck is collected, the robot homes to the cache point and deposits There remains no communication between robots; cache consensus is emergent
24 Cache Sorting by byaarobotic RoboticSwarm Swarm CacheConsensus: Consensus: Rapid Rapid Object Object Sorting Technical Details Timeout ProbSeek Lost_target Timeout Target_acquired Start Puck_carried_(unexpected) Timeout Puck_carried Puck_lost_(unexpected) Cluster_contacted Target_aquired Puck_lost_(unexpected) Lost_target (a) ProbSeek finite state machine. (a) ProbSeek finite state machine. Timeout CacheCons Lost_target Timeout Target_acquired Start Puck_carried_(unexpected) Timeout Puck_carried Puck_lost_(unexpected) Home_cluster_contacted (b) CacheCons finite state machine.
25 CacheCons Demo
26 Technical Details Details ProbSeek and CacheCons: Avoidance of robots, walls, and nontargeted clusters: VFH+ CacheCons: Memory of cache sizes: m 0 j =max(m j, size(c j )) Caches for different puck types separated by at least 50 cm (if conflict, the larger cache is kept)

27 187 x 187 cm Rounded Corners Visual markers on robots tracked from above (cheating!) Experimental Setup Painted Pucks

28 (a) (b) Custom Simulation
 n")

29 Details the global map is denoted astechnical j and pe llows. Largest cluster of type j P C = 100% Percentage Completion P j size( j ) n metric derived from percentage completi ch a particular level of completion. We tr ompletion reaches a target threshold. Sin l tested methods, we use a less ambitio Performance Metric
30
31
32 Cache Consensus: Rapid Object Sorting by a Robotic Swarm 17 Fig. 7 Plots of percentage completion versus time step while varying the number of puck types. The mean value for each data set is indicated by a heavy trace, surrounded by a shaded
33
34 Conclusions Dropping the extreme simplicity assumption doesn t curtail potential correspondence with biology The ability to home to remembered locations enables vastly improved sorting performance
35 References Beckers R, Holland O, Deneubourg JL (1994) From local actions to global tasks: Stigmergy and collective robotics. In: Brooks R, Maes P (eds) Artificial Life IV, pp Deneubourg JL, Goss S, Franks N, Sendova-Franks A, Detrain C, Chrétien L (1990) The dynamics of collective sorting robot-like ants and ant-like robots. In: First Int. Conf. on the Simulation of Adaptive Behaviour, pp Melhuish C, Holland O, Hoddell S (1998) Collective sorting and segregation in robots with minimal sensing. In: 5th Int. Conf. on the Simulation of Adaptive Behaviour Vardy A, Vorobyev G, Banzhaf W (2014) Cache Consensus: Rapid Object Sorting by a Robotic Swarm. Swarm Intelligence, volume 8, pp 61-87
SWARM ROBOTICS: PART 2. Dr. Andrew Vardy COMP 4766 / 6912 Department of Computer Science Memorial University of Newfoundland St.
 SWARM ROBOTICS: PART 2 Dr. Andrew Vardy COMP 4766 / 6912 Department of Computer Science Memorial University of Newfoundland St. John s, Canada PRINCIPLE: SELF-ORGANIZATION 2 SELF-ORGANIZATION Self-organization
SWARM ROBOTICS: PART 2 Dr. Andrew Vardy COMP 4766 / 6912 Department of Computer Science Memorial University of Newfoundland St. John s, Canada PRINCIPLE: SELF-ORGANIZATION 2 SELF-ORGANIZATION Self-organization
SWARM ROBOTICS: PART 2
 SWARM ROBOTICS: PART 2 PRINCIPLE: SELF-ORGANIZATION Dr. Andrew Vardy COMP 4766 / 6912 Department of Computer Science Memorial University of Newfoundland St. John s, Canada 2 SELF-ORGANIZATION SO in Non-Biological
SWARM ROBOTICS: PART 2 PRINCIPLE: SELF-ORGANIZATION Dr. Andrew Vardy COMP 4766 / 6912 Department of Computer Science Memorial University of Newfoundland St. John s, Canada 2 SELF-ORGANIZATION SO in Non-Biological
Sorting in Swarm Robots Using Communication-Based Cluster Size Estimation
 Sorting in Swarm Robots Using Communication-Based Cluster Size Estimation Hongli Ding and Heiko Hamann Department of Computer Science, University of Paderborn, Paderborn, Germany hongli.ding@uni-paderborn.de,
Sorting in Swarm Robots Using Communication-Based Cluster Size Estimation Hongli Ding and Heiko Hamann Department of Computer Science, University of Paderborn, Paderborn, Germany hongli.ding@uni-paderborn.de,
Biological Inspirations for Distributed Robotics. Dr. Daisy Tang
 Biological Inspirations for Distributed Robotics Dr. Daisy Tang Outline Biological inspirations Understand two types of biological parallels Understand key ideas for distributed robotics obtained from
Biological Inspirations for Distributed Robotics Dr. Daisy Tang Outline Biological inspirations Understand two types of biological parallels Understand key ideas for distributed robotics obtained from
Sequential Task Execution in a Minimalist Distributed Robotic System
 Sequential Task Execution in a Minimalist Distributed Robotic System Chris Jones Maja J. Matarić Computer Science Department University of Southern California 941 West 37th Place, Mailcode 0781 Los Angeles,
Sequential Task Execution in a Minimalist Distributed Robotic System Chris Jones Maja J. Matarić Computer Science Department University of Southern California 941 West 37th Place, Mailcode 0781 Los Angeles,
biologically-inspired computing lecture 20 Informatics luis rocha 2015 biologically Inspired computing INDIANA UNIVERSITY
 lecture 20 -inspired Sections I485/H400 course outlook Assignments: 35% Students will complete 4/5 assignments based on algorithms presented in class Lab meets in I1 (West) 109 on Lab Wednesdays Lab 0
lecture 20 -inspired Sections I485/H400 course outlook Assignments: 35% Students will complete 4/5 assignments based on algorithms presented in class Lab meets in I1 (West) 109 on Lab Wednesdays Lab 0
Multiagent systems: Lessons from social insects and collective
 Multiagent systems: Lessons from social insects and collective robotics O.E.Holland Intelligent Autonomous Systems Laboratory Faculty of Engineering [Jniversity of the West of England Bristol BS16 1QY
Multiagent systems: Lessons from social insects and collective robotics O.E.Holland Intelligent Autonomous Systems Laboratory Faculty of Engineering [Jniversity of the West of England Bristol BS16 1QY
Probabilistic Modelling of a Bio-Inspired Collective Experiment with Real Robots
 Probabilistic Modelling of a Bio-Inspired Collective Experiment with Real Robots A. Martinoli, and F. Mondada Microcomputing Laboratory, Swiss Federal Institute of Technology IN-F Ecublens, CH- Lausanne
Probabilistic Modelling of a Bio-Inspired Collective Experiment with Real Robots A. Martinoli, and F. Mondada Microcomputing Laboratory, Swiss Federal Institute of Technology IN-F Ecublens, CH- Lausanne
MITIGATING SPATIAL INTERFERENCE IN A SCALABLE ROBOT RECYCLING SYSTEM ANDREW VARDY AUGUST 2015
 MITIGATING SPATIAL INTERFERENCE IN A SCALABLE ROBOT RECYCLING SYSTEM ANDREW VARDY AUGUST 2015 2014-15 HARRIS CENTRE - MMSB WASTE MANAGEMENT APPLIED RESEARCH FUND Contents 1 Acknowledgements 3 2 Executive
MITIGATING SPATIAL INTERFERENCE IN A SCALABLE ROBOT RECYCLING SYSTEM ANDREW VARDY AUGUST 2015 2014-15 HARRIS CENTRE - MMSB WASTE MANAGEMENT APPLIED RESEARCH FUND Contents 1 Acknowledgements 3 2 Executive
Path formation in a robot swarm
 Swarm Intell (2008) 2: 1 23 DOI 10.1007/s11721-007-0009-6 Path formation in a robot swarm Self-organized strategies to find your way home Shervin Nouyan Alexandre Campo Marco Dorigo Received: 31 January
Swarm Intell (2008) 2: 1 23 DOI 10.1007/s11721-007-0009-6 Path formation in a robot swarm Self-organized strategies to find your way home Shervin Nouyan Alexandre Campo Marco Dorigo Received: 31 January
Multi-Robot Coordination. Chapter 11
 Multi-Robot Coordination Chapter 11 Objectives To understand some of the problems being studied with multiple robots To understand the challenges involved with coordinating robots To investigate a simple
Multi-Robot Coordination Chapter 11 Objectives To understand some of the problems being studied with multiple robots To understand the challenges involved with coordinating robots To investigate a simple
PSYCO 457 Week 9: Collective Intelligence and Embodiment
 PSYCO 457 Week 9: Collective Intelligence and Embodiment Intelligent Collectives Cooperative Transport Robot Embodiment and Stigmergy Robots as Insects Emergence The world is full of examples of intelligence
PSYCO 457 Week 9: Collective Intelligence and Embodiment Intelligent Collectives Cooperative Transport Robot Embodiment and Stigmergy Robots as Insects Emergence The world is full of examples of intelligence
FROM LOCAL ACTIONS TO GLOBAL TASKS: STIGMERGY AND COLLECTIVE ROBOTICS
 FROM LOCAL ACTIONS TO GLOBAL TASKS: STIGMERGY AND COLLECTIVE ROBOTICS R. Beckers 1,2, O.E. Holland 1,3 and J.L. Deneubourg 2 1 ZiF-Universität Bielefeld, Wellenberg 1, D-33615 Bielefeld 2 Centre for non-linear
FROM LOCAL ACTIONS TO GLOBAL TASKS: STIGMERGY AND COLLECTIVE ROBOTICS R. Beckers 1,2, O.E. Holland 1,3 and J.L. Deneubourg 2 1 ZiF-Universität Bielefeld, Wellenberg 1, D-33615 Bielefeld 2 Centre for non-linear
In vivo, in silico, in machina: ants and robots balance memory and communication to collectively exploit information
 In vivo, in silico, in machina: ants and robots balance memory and communication to collectively exploit information Melanie E. Moses, Kenneth Letendre, Joshua P. Hecker, Tatiana P. Flanagan Department
In vivo, in silico, in machina: ants and robots balance memory and communication to collectively exploit information Melanie E. Moses, Kenneth Letendre, Joshua P. Hecker, Tatiana P. Flanagan Department
Path Formation and Goal Search in Swarm Robotics
 Path Formation and Goal Search in Swarm Robotics by Shervin Nouyan Université Libre de Bruxelles, IRIDIA Avenue Franklin Roosevelt 50, CP 194/6, 1050 Brussels, Belgium SNouyan@ulb.ac.be Supervised by Marco
Path Formation and Goal Search in Swarm Robotics by Shervin Nouyan Université Libre de Bruxelles, IRIDIA Avenue Franklin Roosevelt 50, CP 194/6, 1050 Brussels, Belgium SNouyan@ulb.ac.be Supervised by Marco
Towards an Engineering Science of Robot Foraging
 Towards an Engineering Science of Robot Foraging Alan FT Winfield Abstract Foraging is a benchmark problem in robotics - especially for distributed autonomous robotic systems. The systematic study of robot
Towards an Engineering Science of Robot Foraging Alan FT Winfield Abstract Foraging is a benchmark problem in robotics - especially for distributed autonomous robotic systems. The systematic study of robot
1) Complexity, Emergence & CA (sb) 2) Fractals and L-systems (sb) 3) Multi-agent systems (vg) 4) Swarm intelligence (vg) 5) Artificial evolution (vg)
 Complexity, Emergence & CA (sb) 2) Fractals and L-systems (sb) 3) Multi-agent systems (vg) 4) Swarm intelligence (vg) 5) Artificial evolution (vg)") 1) Complexity, Emergence & CA (sb) 2) Fractals and L-systems (sb) 3) Multi-agent systems (vg) 4) Swarm intelligence (vg) 5) Artificial evolution (vg) 6) Virtual Ecosystems & Perspectives (sb) Inspired
1) Complexity, Emergence & CA (sb) 2) Fractals and L-systems (sb) 3) Multi-agent systems (vg) 4) Swarm intelligence (vg) 5) Artificial evolution (vg) 6) Virtual Ecosystems & Perspectives (sb) Inspired
CS594, Section 30682:
 CS594, Section 30682: Distributed Intelligence in Autonomous Robotics Spring 2003 Tuesday/Thursday 11:10 12:25 http://www.cs.utk.edu/~parker/courses/cs594-spring03 Instructor: Dr. Lynne E. Parker ½ TA:
CS594, Section 30682: Distributed Intelligence in Autonomous Robotics Spring 2003 Tuesday/Thursday 11:10 12:25 http://www.cs.utk.edu/~parker/courses/cs594-spring03 Instructor: Dr. Lynne E. Parker ½ TA:
CYCLIC GENETIC ALGORITHMS FOR EVOLVING MULTI-LOOP CONTROL PROGRAMS
 CYCLIC GENETIC ALGORITHMS FOR EVOLVING MULTI-LOOP CONTROL PROGRAMS GARY B. PARKER, CONNECTICUT COLLEGE, USA, parker@conncoll.edu IVO I. PARASHKEVOV, CONNECTICUT COLLEGE, USA, iipar@conncoll.edu H. JOSEPH
CYCLIC GENETIC ALGORITHMS FOR EVOLVING MULTI-LOOP CONTROL PROGRAMS GARY B. PARKER, CONNECTICUT COLLEGE, USA, parker@conncoll.edu IVO I. PARASHKEVOV, CONNECTICUT COLLEGE, USA, iipar@conncoll.edu H. JOSEPH
Segregation in Swarms of e-puck Robots Based On the Brazil Nut Effect
 Segregation in Swarms of e-puck Robots Based On the Brazil Nut Effect Jianing Chen, Melvin Gauci, Michael J. Price and Roderich Groß Natural Robotics Lab Department of Automatic Control and Systems Engineering
Segregation in Swarms of e-puck Robots Based On the Brazil Nut Effect Jianing Chen, Melvin Gauci, Michael J. Price and Roderich Groß Natural Robotics Lab Department of Automatic Control and Systems Engineering
Dipartimento di Elettronica Informazione e Bioingegneria Robotics
 Dipartimento di Elettronica Informazione e Bioingegneria Robotics Behavioral robotics @ 2014 Behaviorism behave is what organisms do Behaviorism is built on this assumption, and its goal is to promote
Dipartimento di Elettronica Informazione e Bioingegneria Robotics Behavioral robotics @ 2014 Behaviorism behave is what organisms do Behaviorism is built on this assumption, and its goal is to promote
Collective Robotics. Marcin Pilat
 Collective Robotics Marcin Pilat Introduction Painting a room Complex behaviors: Perceptions, deductions, motivations, choices Robotics: Past: single robot Future: multiple, simple robots working in teams
Collective Robotics Marcin Pilat Introduction Painting a room Complex behaviors: Perceptions, deductions, motivations, choices Robotics: Past: single robot Future: multiple, simple robots working in teams
Fuzzy-Heuristic Robot Navigation in a Simulated Environment
 Fuzzy-Heuristic Robot Navigation in a Simulated Environment S. K. Deshpande, M. Blumenstein and B. Verma School of Information Technology, Griffith University-Gold Coast, PMB 50, GCMC, Bundall, QLD 9726,
Fuzzy-Heuristic Robot Navigation in a Simulated Environment S. K. Deshpande, M. Blumenstein and B. Verma School of Information Technology, Griffith University-Gold Coast, PMB 50, GCMC, Bundall, QLD 9726,
Optic Flow Based Skill Learning for A Humanoid to Trap, Approach to, and Pass a Ball
 Optic Flow Based Skill Learning for A Humanoid to Trap, Approach to, and Pass a Ball Masaki Ogino 1, Masaaki Kikuchi 1, Jun ichiro Ooga 1, Masahiro Aono 1 and Minoru Asada 1,2 1 Dept. of Adaptive Machine
Optic Flow Based Skill Learning for A Humanoid to Trap, Approach to, and Pass a Ball Masaki Ogino 1, Masaaki Kikuchi 1, Jun ichiro Ooga 1, Masahiro Aono 1 and Minoru Asada 1,2 1 Dept. of Adaptive Machine
Swarm Robotics. Lecturer: Roderich Gross
 Swarm Robotics Lecturer: Roderich Gross 1 Outline Why swarm robotics? Example domains: Coordinated exploration Transportation and clustering Reconfigurable robots Summary Stigmergy revisited 2 Sources
Swarm Robotics Lecturer: Roderich Gross 1 Outline Why swarm robotics? Example domains: Coordinated exploration Transportation and clustering Reconfigurable robots Summary Stigmergy revisited 2 Sources
A Genetic Algorithm-Based Controller for Decentralized Multi-Agent Robotic Systems
 A Genetic Algorithm-Based Controller for Decentralized Multi-Agent Robotic Systems Arvin Agah Bio-Robotics Division Mechanical Engineering Laboratory, AIST-MITI 1-2 Namiki, Tsukuba 305, JAPAN agah@melcy.mel.go.jp
A Genetic Algorithm-Based Controller for Decentralized Multi-Agent Robotic Systems Arvin Agah Bio-Robotics Division Mechanical Engineering Laboratory, AIST-MITI 1-2 Namiki, Tsukuba 305, JAPAN agah@melcy.mel.go.jp
Evolving Control for Distributed Micro Air Vehicles'
 Evolving Control for Distributed Micro Air Vehicles' Annie S. Wu Alan C. Schultz Arvin Agah Naval Research Laboratory Naval Research Laboratory Department of EECS Code 5514 Code 5514 The University of
Evolving Control for Distributed Micro Air Vehicles' Annie S. Wu Alan C. Schultz Arvin Agah Naval Research Laboratory Naval Research Laboratory Department of EECS Code 5514 Code 5514 The University of
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT
 MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
MULTI-LAYERED HYBRID ARCHITECTURE TO SOLVE COMPLEX TASKS OF AN AUTONOMOUS MOBILE ROBOT F. TIECHE, C. FACCHINETTI and H. HUGLI Institute of Microtechnology, University of Neuchâtel, Rue de Tivoli 28, CH-2003
Evolving High-Dimensional, Adaptive Camera-Based Speed Sensors
 In: M.H. Hamza (ed.), Proceedings of the 21st IASTED Conference on Applied Informatics, pp. 1278-128. Held February, 1-1, 2, Insbruck, Austria Evolving High-Dimensional, Adaptive Camera-Based Speed Sensors
In: M.H. Hamza (ed.), Proceedings of the 21st IASTED Conference on Applied Informatics, pp. 1278-128. Held February, 1-1, 2, Insbruck, Austria Evolving High-Dimensional, Adaptive Camera-Based Speed Sensors
Two Foraging Algorithms for Robot Swarms Using Only Local Communication
 Two Foraging Algorithms for Robot Swarms Using Only Local Communication Nicholas R. Hoff III Amelia Sagoff Robert J. Wood and Radhika Nagpal TR-07-10 Computer Science Group Harvard University Cambridge,
Two Foraging Algorithms for Robot Swarms Using Only Local Communication Nicholas R. Hoff III Amelia Sagoff Robert J. Wood and Radhika Nagpal TR-07-10 Computer Science Group Harvard University Cambridge,
FAST GOAL NAVIGATION WITH OBSTACLE AVOIDANCE USING A DYNAMIC LOCAL VISUAL MODEL
 FAST GOAL NAVIGATION WITH OBSTACLE AVOIDANCE USING A DYNAMIC LOCAL VISUAL MODEL Juan Fasola jfasola@andrew.cmu.edu Manuela M. Veloso veloso@cs.cmu.edu School of Computer Science Carnegie Mellon University
FAST GOAL NAVIGATION WITH OBSTACLE AVOIDANCE USING A DYNAMIC LOCAL VISUAL MODEL Juan Fasola jfasola@andrew.cmu.edu Manuela M. Veloso veloso@cs.cmu.edu School of Computer Science Carnegie Mellon University
Programmable self-assembly in a thousandrobot
 Programmable self-assembly in a thousandrobot swarm Michael Rubenstein, Alejandro Cornejo, Radhika Nagpal. By- Swapna Joshi 1 st year Ph.D Computing Culture and Society. Authors Michael Rubenstein Assistant
Programmable self-assembly in a thousandrobot swarm Michael Rubenstein, Alejandro Cornejo, Radhika Nagpal. By- Swapna Joshi 1 st year Ph.D Computing Culture and Society. Authors Michael Rubenstein Assistant
INFORMATION AND COMMUNICATION TECHNOLOGIES IMPROVING EFFICIENCIES WAYFINDING SWARM CREATURES EXPLORING THE 3D DYNAMIC VIRTUAL WORLDS
 INFORMATION AND COMMUNICATION TECHNOLOGIES IMPROVING EFFICIENCIES Refereed Paper WAYFINDING SWARM CREATURES EXPLORING THE 3D DYNAMIC VIRTUAL WORLDS University of Sydney, Australia jyoo6711@arch.usyd.edu.au
INFORMATION AND COMMUNICATION TECHNOLOGIES IMPROVING EFFICIENCIES Refereed Paper WAYFINDING SWARM CREATURES EXPLORING THE 3D DYNAMIC VIRTUAL WORLDS University of Sydney, Australia jyoo6711@arch.usyd.edu.au
Vision based Object Recognition of E-Puck Mobile Robot for Warehouse Application
 International Journal of Integrated Engineering, Vol. 6 No. 3 (2014) p. 65-76 Vision based Object Recognition of E-Puck Mobile Robot for Warehouse Application Mehmet S. Guzel 1, John Erwin 2,*, Wan Nurshazwani
International Journal of Integrated Engineering, Vol. 6 No. 3 (2014) p. 65-76 Vision based Object Recognition of E-Puck Mobile Robot for Warehouse Application Mehmet S. Guzel 1, John Erwin 2,*, Wan Nurshazwani
Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization
 Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization Learning to avoid obstacles Outline Problem encoding using GA and ANN Floreano and Mondada
Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization Learning to avoid obstacles Outline Problem encoding using GA and ANN Floreano and Mondada
Overview of Challenges in the Development of Autonomous Mobile Robots. August 23, 2011
 Overview of Challenges in the Development of Autonomous Mobile Robots August 23, 2011 What is in a Robot? Sensors Effectors and actuators (i.e., mechanical) Used for locomotion and manipulation Controllers
Overview of Challenges in the Development of Autonomous Mobile Robots August 23, 2011 What is in a Robot? Sensors Effectors and actuators (i.e., mechanical) Used for locomotion and manipulation Controllers
Subsumption Architecture in Swarm Robotics. Cuong Nguyen Viet 16/11/2015
 Subsumption Architecture in Swarm Robotics Cuong Nguyen Viet 16/11/2015 1 Table of content Motivation Subsumption Architecture Background Architecture decomposition Implementation Swarm robotics Swarm
Subsumption Architecture in Swarm Robotics Cuong Nguyen Viet 16/11/2015 1 Table of content Motivation Subsumption Architecture Background Architecture decomposition Implementation Swarm robotics Swarm
SWARM-BOT: A Swarm of Autonomous Mobile Robots with Self-Assembling Capabilities
 SWARM-BOT: A Swarm of Autonomous Mobile Robots with Self-Assembling Capabilities Francesco Mondada 1, Giovanni C. Pettinaro 2, Ivo Kwee 2, André Guignard 1, Luca Gambardella 2, Dario Floreano 1, Stefano
SWARM-BOT: A Swarm of Autonomous Mobile Robots with Self-Assembling Capabilities Francesco Mondada 1, Giovanni C. Pettinaro 2, Ivo Kwee 2, André Guignard 1, Luca Gambardella 2, Dario Floreano 1, Stefano
start carrying resource? >Ps since last crumb? reached goal? reached home? announce private crumbs clear private crumb list
 Blazing a trail: Insect-inspired resource transportation by a robot team Richard T. Vaughan, Kasper Stfiy, Gaurav S. Sukhatme, and Maja J. Matarić Robotics Research Laboratories, University of Southern
Blazing a trail: Insect-inspired resource transportation by a robot team Richard T. Vaughan, Kasper Stfiy, Gaurav S. Sukhatme, and Maja J. Matarić Robotics Research Laboratories, University of Southern
Regional target surveillance with cooperative robots using APFs
 Rochester Institute of Technology RIT Scholar Works Theses Thesis/Dissertation Collections 4-1-2010 Regional target surveillance with cooperative robots using APFs Jessica LaRocque Follow this and additional
Rochester Institute of Technology RIT Scholar Works Theses Thesis/Dissertation Collections 4-1-2010 Regional target surveillance with cooperative robots using APFs Jessica LaRocque Follow this and additional
Advanced Techniques for Mobile Robotics Location-Based Activity Recognition
 Advanced Techniques for Mobile Robotics Location-Based Activity Recognition Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz Activity Recognition Based on L. Liao, D. J. Patterson, D. Fox,
Advanced Techniques for Mobile Robotics Location-Based Activity Recognition Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz Activity Recognition Based on L. Liao, D. J. Patterson, D. Fox,
An Experimental Comparison of Path Planning Techniques for Teams of Mobile Robots
 An Experimental Comparison of Path Planning Techniques for Teams of Mobile Robots Maren Bennewitz Wolfram Burgard Department of Computer Science, University of Freiburg, 7911 Freiburg, Germany maren,burgard
An Experimental Comparison of Path Planning Techniques for Teams of Mobile Robots Maren Bennewitz Wolfram Burgard Department of Computer Science, University of Freiburg, 7911 Freiburg, Germany maren,burgard
Paulo Urbano. LabMag Universidade de Lisboa
 Multi-Agent t Coordination and Collective Artificial Paintings Paulo Urbano LabMag Universidade de Lisboa pub@di.fc.ul.pt My Goal: Apply techniques for coordinating a group of agents to Swarm Art I m Going
Multi-Agent t Coordination and Collective Artificial Paintings Paulo Urbano LabMag Universidade de Lisboa pub@di.fc.ul.pt My Goal: Apply techniques for coordinating a group of agents to Swarm Art I m Going
Swarm AI: A Solution to Soccer
 Swarm AI: A Solution to Soccer Alex Kutsenok Advisor: Michael Wollowski Senior Thesis Rose-Hulman Institute of Technology Department of Computer Science and Software Engineering May 10th, 2004 Definition
Swarm AI: A Solution to Soccer Alex Kutsenok Advisor: Michael Wollowski Senior Thesis Rose-Hulman Institute of Technology Department of Computer Science and Software Engineering May 10th, 2004 Definition
Lecture Overview. c D. Poole and A. Mackworth 2017 Artificial Intelligence, Lecture 1.1, Page 1 1 / 15
 Lecture Overview What is Artificial Intelligence? Agents acting in an environment Learning objectives: at the end of the class, you should be able to describe what an intelligent agent is identify the
Lecture Overview What is Artificial Intelligence? Agents acting in an environment Learning objectives: at the end of the class, you should be able to describe what an intelligent agent is identify the
Structure and Markings as Stimuli for Autonomous Construction
 Proceedings of the 2017 18th International Conference on Advanced Robotics (ICAR) Hong Kong, China, July 2017 Structure and Markings as Stimuli for Autonomous Construction Michael Allwright Department
Proceedings of the 2017 18th International Conference on Advanced Robotics (ICAR) Hong Kong, China, July 2017 Structure and Markings as Stimuli for Autonomous Construction Michael Allwright Department
Distributed Area Coverage Using Robot Flocks
 Distributed Area Coverage Using Robot Flocks Ke Cheng, Prithviraj Dasgupta and Yi Wang Computer Science Department University of Nebraska, Omaha, NE, USA E-mail: {kcheng,ywang,pdasgupta}@mail.unomaha.edu
Distributed Area Coverage Using Robot Flocks Ke Cheng, Prithviraj Dasgupta and Yi Wang Computer Science Department University of Nebraska, Omaha, NE, USA E-mail: {kcheng,ywang,pdasgupta}@mail.unomaha.edu
Ensuring the Safety of an Autonomous Robot in Interaction with Children
 Machine Learning in Robot Assisted Therapy Ensuring the Safety of an Autonomous Robot in Interaction with Children Challenges and Considerations Stefan Walke stefan.walke@tum.de SS 2018 Overview Physical
Machine Learning in Robot Assisted Therapy Ensuring the Safety of an Autonomous Robot in Interaction with Children Challenges and Considerations Stefan Walke stefan.walke@tum.de SS 2018 Overview Physical
5a. Reactive Agents. COMP3411: Artificial Intelligence. Outline. History of Reactive Agents. Reactive Agents. History of Reactive Agents
 COMP3411 15s1 Reactive Agents 1 COMP3411: Artificial Intelligence 5a. Reactive Agents Outline History of Reactive Agents Chemotaxis Behavior-Based Robotics COMP3411 15s1 Reactive Agents 2 Reactive Agents
COMP3411 15s1 Reactive Agents 1 COMP3411: Artificial Intelligence 5a. Reactive Agents Outline History of Reactive Agents Chemotaxis Behavior-Based Robotics COMP3411 15s1 Reactive Agents 2 Reactive Agents
Design of Adaptive Collective Foraging in Swarm Robotic Systems
 Western Michigan University ScholarWorks at WMU Dissertations Graduate College 5-2010 Design of Adaptive Collective Foraging in Swarm Robotic Systems Hanyi Dai Western Michigan University Follow this and
Western Michigan University ScholarWorks at WMU Dissertations Graduate College 5-2010 Design of Adaptive Collective Foraging in Swarm Robotic Systems Hanyi Dai Western Michigan University Follow this and
Using Artificial intelligent to solve the game of 2048
 Using Artificial intelligent to solve the game of 2048 Ho Shing Hin (20343288) WONG, Ngo Yin (20355097) Lam Ka Wing (20280151) Abstract The report presents the solver of the game 2048 base on artificial
Using Artificial intelligent to solve the game of 2048 Ho Shing Hin (20343288) WONG, Ngo Yin (20355097) Lam Ka Wing (20280151) Abstract The report presents the solver of the game 2048 base on artificial
Improvement of Robot Path Planning Using Particle. Swarm Optimization in Dynamic Environments. with Mobile Obstacles and Target
 Advanced Studies in Biology, Vol. 3, 2011, no. 1, 43-53 Improvement of Robot Path Planning Using Particle Swarm Optimization in Dynamic Environments with Mobile Obstacles and Target Maryam Yarmohamadi
Advanced Studies in Biology, Vol. 3, 2011, no. 1, 43-53 Improvement of Robot Path Planning Using Particle Swarm Optimization in Dynamic Environments with Mobile Obstacles and Target Maryam Yarmohamadi
Whistling in the Dark: Cooperative Trail Following in Uncertain Localization Space
 Whistling in the Dark: Cooperative Trail Following in Uncertain Localization Space Richard T. Vaughan, Kasper Støy, Gaurav S. Sukhatme and Maja J. Matarić Robotics Research Laboratories University of Southern
Whistling in the Dark: Cooperative Trail Following in Uncertain Localization Space Richard T. Vaughan, Kasper Støy, Gaurav S. Sukhatme and Maja J. Matarić Robotics Research Laboratories University of Southern
Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization
 Sensors and Materials, Vol. 28, No. 6 (2016) 695 705 MYU Tokyo 695 S & M 1227 Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization Chun-Chi Lai and Kuo-Lan Su * Department
Sensors and Materials, Vol. 28, No. 6 (2016) 695 705 MYU Tokyo 695 S & M 1227 Artificial Beacons with RGB-D Environment Mapping for Indoor Mobile Robot Localization Chun-Chi Lai and Kuo-Lan Su * Department
Multi robot Team Formation for Distributed Area Coverage. Raj Dasgupta Computer Science Department University of Nebraska, Omaha
 Multi robot Team Formation for Distributed Area Coverage Raj Dasgupta Computer Science Department University of Nebraska, Omaha C MANTIC Lab Collaborative Multi AgeNt/Multi robot Technologies for Intelligent
Multi robot Team Formation for Distributed Area Coverage Raj Dasgupta Computer Science Department University of Nebraska, Omaha C MANTIC Lab Collaborative Multi AgeNt/Multi robot Technologies for Intelligent
Learning Behaviors for Environment Modeling by Genetic Algorithm
 Learning Behaviors for Environment Modeling by Genetic Algorithm Seiji Yamada Department of Computational Intelligence and Systems Science Interdisciplinary Graduate School of Science and Engineering Tokyo
Learning Behaviors for Environment Modeling by Genetic Algorithm Seiji Yamada Department of Computational Intelligence and Systems Science Interdisciplinary Graduate School of Science and Engineering Tokyo
Image Analysis of Granular Mixtures: Using Neural Networks Aided by Heuristics
 Image Analysis of Granular Mixtures: Using Neural Networks Aided by Heuristics Justin Eldridge The Ohio State University In order to gain a deeper understanding of how individual grain configurations affect
Image Analysis of Granular Mixtures: Using Neural Networks Aided by Heuristics Justin Eldridge The Ohio State University In order to gain a deeper understanding of how individual grain configurations affect
Interactive Surface for Bio-inspired Robotics, Re-examining Foraging Models
 Interactive Surface for Bio-inspired Robotics, Re-examining Foraging Models Olivier Simonin, Thomas Huraux, François Charpillet Université Henri Poincaré and INRIA Nancy Grand Est MAIA team, LORIA Laboratory
Interactive Surface for Bio-inspired Robotics, Re-examining Foraging Models Olivier Simonin, Thomas Huraux, François Charpillet Université Henri Poincaré and INRIA Nancy Grand Est MAIA team, LORIA Laboratory
From Tom Thumb to the Dockers: Some Experiments with Foraging Robots
 From Tom Thumb to the Dockers: Some Experiments with Foraging Robots Alexis Drogoul, Jacques Ferber LAFORIA, Boîte 169,Université Paris VI, 75252 PARIS CEDEX O5 FRANCE drogoul@laforia.ibp.fr, ferber@laforia.ibp.fr
From Tom Thumb to the Dockers: Some Experiments with Foraging Robots Alexis Drogoul, Jacques Ferber LAFORIA, Boîte 169,Université Paris VI, 75252 PARIS CEDEX O5 FRANCE drogoul@laforia.ibp.fr, ferber@laforia.ibp.fr
Lane Detection in Automotive
 Lane Detection in Automotive Contents Introduction... 2 Image Processing... 2 Reading an image... 3 RGB to Gray... 3 Mean and Gaussian filtering... 5 Defining our Region of Interest... 6 BirdsEyeView Transformation...
Lane Detection in Automotive Contents Introduction... 2 Image Processing... 2 Reading an image... 3 RGB to Gray... 3 Mean and Gaussian filtering... 5 Defining our Region of Interest... 6 BirdsEyeView Transformation...
Multi-Agent Simulation & Kinect Game
 Multi-Agent Simulation & Kinect Game Actual Intelligence Eric Clymer Beth Neilsen Jake Piccolo Geoffry Sumter Abstract This study aims to compare the effectiveness of a greedy multi-agent system to the
Multi-Agent Simulation & Kinect Game Actual Intelligence Eric Clymer Beth Neilsen Jake Piccolo Geoffry Sumter Abstract This study aims to compare the effectiveness of a greedy multi-agent system to the
Modeling Swarm Robotic Systems
 Modeling Swarm Robotic Systems Alcherio Martinoli and Kjerstin Easton California Institute of Technology, M/C 136-93, 1200 E. California Blvd. Pasadena, CA 91125, U.S.A. alcherio,easton@caltech.edu, http://www.coro.caltech.edu
Modeling Swarm Robotic Systems Alcherio Martinoli and Kjerstin Easton California Institute of Technology, M/C 136-93, 1200 E. California Blvd. Pasadena, CA 91125, U.S.A. alcherio,easton@caltech.edu, http://www.coro.caltech.edu
Vishnu Nath. Usage of computer vision and humanoid robotics to create autonomous robots. (Ximea Currera RL04C Camera Kit)
") Vishnu Nath Usage of computer vision and humanoid robotics to create autonomous robots (Ximea Currera RL04C Camera Kit) Acknowledgements Firstly, I would like to thank Ivan Klimkovic of Ximea Corporation,
Vishnu Nath Usage of computer vision and humanoid robotics to create autonomous robots (Ximea Currera RL04C Camera Kit) Acknowledgements Firstly, I would like to thank Ivan Klimkovic of Ximea Corporation,
Semi-Autonomous Parking for Enhanced Safety and Efficiency
 Technical Report 105 Semi-Autonomous Parking for Enhanced Safety and Efficiency Sriram Vishwanath WNCG June 2017 Data-Supported Transportation Operations & Planning Center (D-STOP) A Tier 1 USDOT University
Technical Report 105 Semi-Autonomous Parking for Enhanced Safety and Efficiency Sriram Vishwanath WNCG June 2017 Data-Supported Transportation Operations & Planning Center (D-STOP) A Tier 1 USDOT University
NAVIGATION OF MOBILE ROBOT USING THE PSO PARTICLE SWARM OPTIMIZATION
 Journal of Academic and Applied Studies (JAAS) Vol. 2(1) Jan 2012, pp. 32-38 Available online @ www.academians.org ISSN1925-931X NAVIGATION OF MOBILE ROBOT USING THE PSO PARTICLE SWARM OPTIMIZATION Sedigheh
Journal of Academic and Applied Studies (JAAS) Vol. 2(1) Jan 2012, pp. 32-38 Available online @ www.academians.org ISSN1925-931X NAVIGATION OF MOBILE ROBOT USING THE PSO PARTICLE SWARM OPTIMIZATION Sedigheh
EMERGENCE OF COMMUNICATION IN TEAMS OF EMBODIED AND SITUATED AGENTS
 EMERGENCE OF COMMUNICATION IN TEAMS OF EMBODIED AND SITUATED AGENTS DAVIDE MAROCCO STEFANO NOLFI Institute of Cognitive Science and Technologies, CNR, Via San Martino della Battaglia 44, Rome, 00185, Italy
EMERGENCE OF COMMUNICATION IN TEAMS OF EMBODIED AND SITUATED AGENTS DAVIDE MAROCCO STEFANO NOLFI Institute of Cognitive Science and Technologies, CNR, Via San Martino della Battaglia 44, Rome, 00185, Italy
Available online at ScienceDirect. Procedia Computer Science 76 (2015 )
") Available online at www.sciencedirect.com ScienceDirect Procedia Computer Science 76 (2015 ) 474 479 2015 IEEE International Symposium on Robotics and Intelligent Sensors (IRIS 2015) Sensor Based Mobile
Available online at www.sciencedirect.com ScienceDirect Procedia Computer Science 76 (2015 ) 474 479 2015 IEEE International Symposium on Robotics and Intelligent Sensors (IRIS 2015) Sensor Based Mobile
Dispersing robots in an unknown environment
 Dispersing robots in an unknown environment Ryan Morlok and Maria Gini Department of Computer Science and Engineering, University of Minnesota, 200 Union St. S.E., Minneapolis, MN 55455-0159 {morlok,gini}@cs.umn.edu
Dispersing robots in an unknown environment Ryan Morlok and Maria Gini Department of Computer Science and Engineering, University of Minnesota, 200 Union St. S.E., Minneapolis, MN 55455-0159 {morlok,gini}@cs.umn.edu
Multi-Feature Collective Decision Making in Robot Swarms
 Multi-Feature Collective Decision Making in Robot Swarms Robotics Track Julia T. Ebert Harvard University Cambridge, MA ebert@g.harvard.edu Melvin Gauci Harvard University Cambridge, MA mgauci@g.harvard.edu
Multi-Feature Collective Decision Making in Robot Swarms Robotics Track Julia T. Ebert Harvard University Cambridge, MA ebert@g.harvard.edu Melvin Gauci Harvard University Cambridge, MA mgauci@g.harvard.edu
Ergodic dynamics for large-scale distributed robot systems
 In Proceedings of the 5th International Conference on Unconventional Computation (UC 06) York, UK. 4th-8th September 2006 Ergodic dynamics for large-scale distributed robot systems Dylan A. Shell and Maja
In Proceedings of the 5th International Conference on Unconventional Computation (UC 06) York, UK. 4th-8th September 2006 Ergodic dynamics for large-scale distributed robot systems Dylan A. Shell and Maja
Task Partitioning in a Robot Swarm: Object Retrieval as a Sequence of Subtasks with Direct Object Transfer
 Task Partitioning in a Robot Swarm: Object Retrieval as a Sequence of Subtasks with Direct Object Transfer Giovanni Pini*, ** Université Libre de Bruxelles Arne Brutschy** Université Libre de Bruxelles
Task Partitioning in a Robot Swarm: Object Retrieval as a Sequence of Subtasks with Direct Object Transfer Giovanni Pini*, ** Université Libre de Bruxelles Arne Brutschy** Université Libre de Bruxelles
Investigation of Navigating Mobile Agents in Simulation Environments
 Investigation of Navigating Mobile Agents in Simulation Environments Theses of the Doctoral Dissertation Richárd Szabó Department of Software Technology and Methodology Faculty of Informatics Loránd Eötvös
Investigation of Navigating Mobile Agents in Simulation Environments Theses of the Doctoral Dissertation Richárd Szabó Department of Software Technology and Methodology Faculty of Informatics Loránd Eötvös
Sokoban: Reversed Solving
 Sokoban: Reversed Solving Frank Takes (ftakes@liacs.nl) Leiden Institute of Advanced Computer Science (LIACS), Leiden University June 20, 2008 Abstract This article describes a new method for attempting
Sokoban: Reversed Solving Frank Takes (ftakes@liacs.nl) Leiden Institute of Advanced Computer Science (LIACS), Leiden University June 20, 2008 Abstract This article describes a new method for attempting
Segmentation using Saturation Thresholding and its Application in Content-Based Retrieval of Images
 Segmentation using Saturation Thresholding and its Application in Content-Based Retrieval of Images A. Vadivel 1, M. Mohan 1, Shamik Sural 2 and A.K.Majumdar 1 1 Department of Computer Science and Engineering,
Segmentation using Saturation Thresholding and its Application in Content-Based Retrieval of Images A. Vadivel 1, M. Mohan 1, Shamik Sural 2 and A.K.Majumdar 1 1 Department of Computer Science and Engineering,
Swarm Intelligence. Corey Fehr Merle Good Shawn Keown Gordon Fedoriw
 Swarm Intelligence Corey Fehr Merle Good Shawn Keown Gordon Fedoriw Ants in the Pants! An Overview Real world insect examples Theory of Swarm Intelligence From Insects to Realistic A.I. Algorithms Examples
Swarm Intelligence Corey Fehr Merle Good Shawn Keown Gordon Fedoriw Ants in the Pants! An Overview Real world insect examples Theory of Swarm Intelligence From Insects to Realistic A.I. Algorithms Examples
Behaviour-Based Control. IAR Lecture 5 Barbara Webb
 Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
MULTI ROBOT COMMUNICATION AND TARGET TRACKING SYSTEM AND IMPLEMENTATION OF ROBOT USING ARDUINO
 MULTI ROBOT COMMUNICATION AND TARGET TRACKING SYSTEM AND IMPLEMENTATION OF ROBOT USING ARDUINO K. Sindhuja 1, CH. Lavanya 2 1Student, Department of ECE, GIST College, Andhra Pradesh, INDIA 2Assistant Professor,
MULTI ROBOT COMMUNICATION AND TARGET TRACKING SYSTEM AND IMPLEMENTATION OF ROBOT USING ARDUINO K. Sindhuja 1, CH. Lavanya 2 1Student, Department of ECE, GIST College, Andhra Pradesh, INDIA 2Assistant Professor,
Artificial Intelligence
 Artificial Intelligence Lecture 01 - Introduction Edirlei Soares de Lima What is Artificial Intelligence? Artificial intelligence is about making computers able to perform the
Artificial Intelligence Lecture 01 - Introduction Edirlei Soares de Lima What is Artificial Intelligence? Artificial intelligence is about making computers able to perform the
Robotic Systems ECE 401RB Fall 2007
 The following notes are from: Robotic Systems ECE 401RB Fall 2007 Lecture 14: Cooperation among Multiple Robots Part 2 Chapter 12, George A. Bekey, Autonomous Robots: From Biological Inspiration to Implementation
The following notes are from: Robotic Systems ECE 401RB Fall 2007 Lecture 14: Cooperation among Multiple Robots Part 2 Chapter 12, George A. Bekey, Autonomous Robots: From Biological Inspiration to Implementation
A Neural-Endocrine Architecture for Foraging in Swarm Robotic Systems
 A Neural-Endocrine Architecture for Foraging in Swarm Robotic Systems Jon Timmis and Lachlan Murray and Mark Neal Abstract This paper presents the novel use of the Neural-endocrine architecture for swarm
A Neural-Endocrine Architecture for Foraging in Swarm Robotic Systems Jon Timmis and Lachlan Murray and Mark Neal Abstract This paper presents the novel use of the Neural-endocrine architecture for swarm
CSC C85 Embedded Systems Project # 1 Robot Localization
 1 The goal of this project is to apply the ideas we have discussed in lecture to a real-world robot localization task. You will be working with Lego NXT robots, and you will have to find ways to work around
1 The goal of this project is to apply the ideas we have discussed in lecture to a real-world robot localization task. You will be working with Lego NXT robots, and you will have to find ways to work around
INTELLIGENT CONTROL OF AUTONOMOUS SIX-LEGGED ROBOTS BY NEURAL NETWORKS
 INTELLIGENT CONTROL OF AUTONOMOUS SIX-LEGGED ROBOTS BY NEURAL NETWORKS Prof. Dr. W. Lechner 1 Dipl.-Ing. Frank Müller 2 Fachhochschule Hannover University of Applied Sciences and Arts Computer Science
INTELLIGENT CONTROL OF AUTONOMOUS SIX-LEGGED ROBOTS BY NEURAL NETWORKS Prof. Dr. W. Lechner 1 Dipl.-Ing. Frank Müller 2 Fachhochschule Hannover University of Applied Sciences and Arts Computer Science
Self-Organised Task Allocation in a Group of Robots
 Self-Organised Task Allocation in a Group of Robots Thomas H. Labella, Marco Dorigo and Jean-Louis Deneubourg Technical Report No. TR/IRIDIA/2004-6 November 30, 2004 Published in R. Alami, editor, Proceedings
Self-Organised Task Allocation in a Group of Robots Thomas H. Labella, Marco Dorigo and Jean-Louis Deneubourg Technical Report No. TR/IRIDIA/2004-6 November 30, 2004 Published in R. Alami, editor, Proceedings
Learning Reactive Neurocontrollers using Simulated Annealing for Mobile Robots
 Learning Reactive Neurocontrollers using Simulated Annealing for Mobile Robots Philippe Lucidarme, Alain Liégeois LIRMM, University Montpellier II, France, lucidarm@lirmm.fr Abstract This paper presents
Learning Reactive Neurocontrollers using Simulated Annealing for Mobile Robots Philippe Lucidarme, Alain Liégeois LIRMM, University Montpellier II, France, lucidarm@lirmm.fr Abstract This paper presents
Spring 2005 Group 6 Final Report EZ Park
 18-551 Spring 2005 Group 6 Final Report EZ Park Paul Li cpli@andrew.cmu.edu Ivan Ng civan@andrew.cmu.edu Victoria Chen vchen@andrew.cmu.edu -1- Table of Content INTRODUCTION... 3 PROBLEM... 3 SOLUTION...
18-551 Spring 2005 Group 6 Final Report EZ Park Paul Li cpli@andrew.cmu.edu Ivan Ng civan@andrew.cmu.edu Victoria Chen vchen@andrew.cmu.edu -1- Table of Content INTRODUCTION... 3 PROBLEM... 3 SOLUTION...
Wasp-Like Scheduling for Unit Training in Real-Time Strategy Games
 Proceedings of the Seventh AAAI Conference on Artificial Intelligence and Interactive Digital Entertainment Wasp-Like Scheduling for Unit Training in Real-Time Strategy Games Marco Santos and Carlos Martinho
Proceedings of the Seventh AAAI Conference on Artificial Intelligence and Interactive Digital Entertainment Wasp-Like Scheduling for Unit Training in Real-Time Strategy Games Marco Santos and Carlos Martinho
Shuffled Complex Evolution
 Shuffled Complex Evolution Shuffled Complex Evolution An Evolutionary algorithm That performs local and global search A solution evolves locally through a memetic evolution (Local search) This local search
Shuffled Complex Evolution Shuffled Complex Evolution An Evolutionary algorithm That performs local and global search A solution evolves locally through a memetic evolution (Local search) This local search
Behaviour Patterns Evolution on Individual and Group Level. Stanislav Slušný, Roman Neruda, Petra Vidnerová. CIMMACS 07, December 14, Tenerife
 Behaviour Patterns Evolution on Individual and Group Level Stanislav Slušný, Roman Neruda, Petra Vidnerová Department of Theoretical Computer Science Institute of Computer Science Academy of Science of
Behaviour Patterns Evolution on Individual and Group Level Stanislav Slušný, Roman Neruda, Petra Vidnerová Department of Theoretical Computer Science Institute of Computer Science Academy of Science of
Embodiment of Honeybee s Thermotaxis in a Mobile Robot Swarm
 Embodiment of Honeybee s Thermotaxis in a Mobile Robot Swarm Daniela Kengyel 1, Thomas Schmickl 2, Heiko Hamann 2, Ronald Thenius 2, and Karl Crailsheim 2 1 University of Applied Sciences St. Poelten,
Embodiment of Honeybee s Thermotaxis in a Mobile Robot Swarm Daniela Kengyel 1, Thomas Schmickl 2, Heiko Hamann 2, Ronald Thenius 2, and Karl Crailsheim 2 1 University of Applied Sciences St. Poelten,
A Probabilistic Method for Planning Collision-free Trajectories of Multiple Mobile Robots
 A Probabilistic Method for Planning Collision-free Trajectories of Multiple Mobile Robots Maren Bennewitz Wolfram Burgard Department of Computer Science, University of Freiburg, 7911 Freiburg, Germany
A Probabilistic Method for Planning Collision-free Trajectories of Multiple Mobile Robots Maren Bennewitz Wolfram Burgard Department of Computer Science, University of Freiburg, 7911 Freiburg, Germany
TRAFFIC SIGNAL CONTROL WITH ANT COLONY OPTIMIZATION. A Thesis presented to the Faculty of California Polytechnic State University, San Luis Obispo
 TRAFFIC SIGNAL CONTROL WITH ANT COLONY OPTIMIZATION A Thesis presented to the Faculty of California Polytechnic State University, San Luis Obispo In Partial Fulfillment of the Requirements for the Degree
TRAFFIC SIGNAL CONTROL WITH ANT COLONY OPTIMIZATION A Thesis presented to the Faculty of California Polytechnic State University, San Luis Obispo In Partial Fulfillment of the Requirements for the Degree
Easy Robot Programming for Industrial Manipulators by Manual Volume Sweeping
 Easy Robot Programming for Industrial Manipulators by Manual Volume Sweeping *Yusuke MAEDA, Tatsuya USHIODA and Satoshi MAKITA (Yokohama National University) MAEDA Lab INTELLIGENT & INDUSTRIAL ROBOTICS
Easy Robot Programming for Industrial Manipulators by Manual Volume Sweeping *Yusuke MAEDA, Tatsuya USHIODA and Satoshi MAKITA (Yokohama National University) MAEDA Lab INTELLIGENT & INDUSTRIAL ROBOTICS
Zhan Chen and Israel Koren. University of Massachusetts, Amherst, MA 01003, USA. Abstract
 Layer Assignment for Yield Enhancement Zhan Chen and Israel Koren Department of Electrical and Computer Engineering University of Massachusetts, Amherst, MA 0003, USA Abstract In this paper, two algorithms
Layer Assignment for Yield Enhancement Zhan Chen and Israel Koren Department of Electrical and Computer Engineering University of Massachusetts, Amherst, MA 0003, USA Abstract In this paper, two algorithms
Evolving Predator Control Programs for an Actual Hexapod Robot Predator
 Evolving Predator Control Programs for an Actual Hexapod Robot Predator Gary Parker Department of Computer Science Connecticut College New London, CT, USA parker@conncoll.edu Basar Gulcu Department of
Evolving Predator Control Programs for an Actual Hexapod Robot Predator Gary Parker Department of Computer Science Connecticut College New London, CT, USA parker@conncoll.edu Basar Gulcu Department of
Humans used a web interface to say same person or different person for a large set of faces. Several computer programs made the same comparisons
 OPTO 6124 Perception Scott Stevenson Image Segmentation What is really behind so many perception demos? Perception demos show us that our visual understanding of the world involves a lot of filling in
OPTO 6124 Perception Scott Stevenson Image Segmentation What is really behind so many perception demos? Perception demos show us that our visual understanding of the world involves a lot of filling in
Group Transport Along a Robot Chain in a Self-Organised Robot Colony
 Intelligent Autonomous Systems 9 T. Arai et al. (Eds.) IOS Press, 2006 2006 The authors. All rights reserved. 433 Group Transport Along a Robot Chain in a Self-Organised Robot Colony Shervin Nouyan a,
Intelligent Autonomous Systems 9 T. Arai et al. (Eds.) IOS Press, 2006 2006 The authors. All rights reserved. 433 Group Transport Along a Robot Chain in a Self-Organised Robot Colony Shervin Nouyan a,
KOVAN Dept. of Computer Eng. Middle East Technical University Ankara, Turkey
 Swarm Robotics: From sources of inspiration to domains of application Erol Sahin KOVAN Dept. of Computer Eng. Middle East Technical University Ankara, Turkey http://www.kovan.ceng.metu.edu.tr What is Swarm
Swarm Robotics: From sources of inspiration to domains of application Erol Sahin KOVAN Dept. of Computer Eng. Middle East Technical University Ankara, Turkey http://www.kovan.ceng.metu.edu.tr What is Swarm
Unit 1: Introduction to Autonomous Robotics
 Unit 1: Introduction to Autonomous Robotics Computer Science 6912 Andrew Vardy Department of Computer Science Memorial University of Newfoundland May 13, 2016 COMP 6912 (MUN) Course Introduction May 13,
Unit 1: Introduction to Autonomous Robotics Computer Science 6912 Andrew Vardy Department of Computer Science Memorial University of Newfoundland May 13, 2016 COMP 6912 (MUN) Course Introduction May 13,
Motion Planning in Dynamic Environments
 Motion Planning in Dynamic Environments Trajectory Following, D*, Gyroscopic Forces MEM380: Applied Autonomous Robots I 2012 1 Trajectory Following Assume Unicycle model for robot (x, y, θ) v = v const
Motion Planning in Dynamic Environments Trajectory Following, D*, Gyroscopic Forces MEM380: Applied Autonomous Robots I 2012 1 Trajectory Following Assume Unicycle model for robot (x, y, θ) v = v const
Sensing and Perception
 Unit D tion Exploring Robotics Spring, 2013 D.1 Why does a robot need sensors? the environment is complex the environment is dynamic enable the robot to learn about current conditions in its environment.
Unit D tion Exploring Robotics Spring, 2013 D.1 Why does a robot need sensors? the environment is complex the environment is dynamic enable the robot to learn about current conditions in its environment.