DESIGN OF MAGNETIC LEVITATION DEMONSTRATION APPARTUS
|
|
|
- Allyson O’Neal’
- 5 years ago
- Views:
Transcription

1 TEAM 11 WINTER TERM PRESENTATION DESIGN OF MAGNETIC LEVITATION DEMONSTRATION APPARTUS Fuyuan Lin, Marlon McCombie, Ajay Puppala Xiaodong Wang Supervisor: Dr. Robert Bauer Dept. of Mechanical Engineering, Dalhousie University April 4,
2 2 Presentation Overview 1. Project Description 2. Design Requirements 3. Product Architecture 4. Component Selection 5. Conceptual Design i. Design Alternatives ii. Chassis Design 6. Control System i. Plant Subsystem ii. Circuit Design: Amplifier & Driver iii. Controller 7. System Implementation 8. GUI 9. Budget 10. Assessing Requirements 11. Future Considerations

 & Circuitry for Levitation")
3 1. Project Description 3 Design and build a magnetic levitating device To levitate an object magnetically Demonstrate different control theories taught in MECH 4900 Systems II course Arduino (MCU) & Circuitry for Levitation Object Levitating
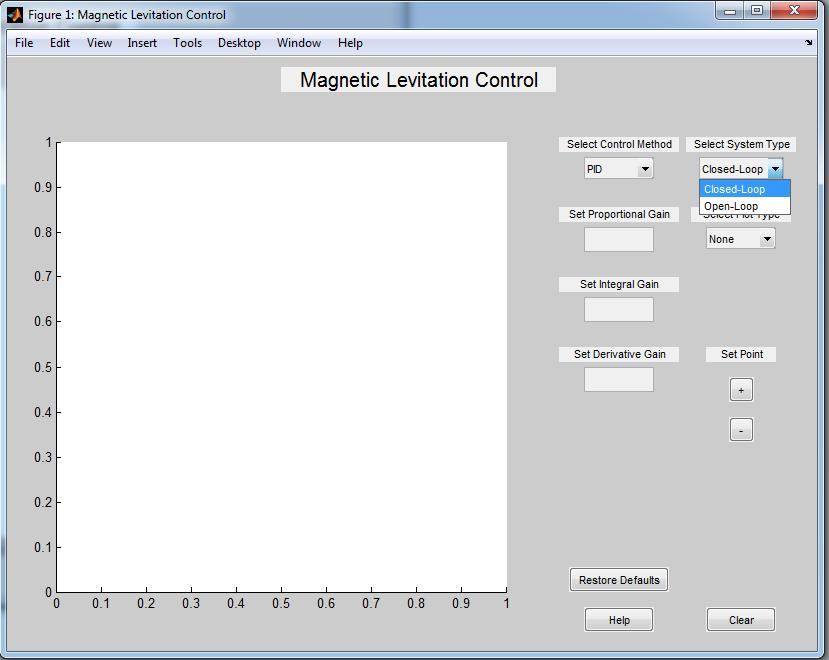
4 4 2. Design Requirements Demonstrative Requirements Levitate object magnetically Compare simulated and experimental position of the object being levitated Lag, lead, lag-lead P, PI, and PID control User Requirements Graphical User Interface (GUI) to interact with device Plug n Play Safe and Ergonomic
5 5 2. Design Requirements Visual Requirements Viewable from ft. (back of the classroom) Levitate the object at least 2-4 cm away from the coil Power Requirements Conventional 120 VAC input No potential electrical risk to the user Operating Budget $1,500

6 3. Product Architecture 6 General Schematic of demonstration device
7 4. Component Selection 7 Levitation Technique Permanent Magnets Electromagnets Electrodynamics Superconductors Object Material Shape Motion MCU Sensor Chrome Steel Rectangular Horizontal prism Arduino Hall Effect Regular Steel LEGO Circular Vertical Mindstorm disk NXT 2.0 Reflective Neodymium Solid sphere Composite Hollow sphere BeagleBoard Table shows selected components of the subsystem Optical Proximity Altera DE2 Photoelectric

8 Electromagnetic Levitation 8 Strength of magnetic field generated by the coil depends on the current supplied Control challenge: F Electromagnet current2 distance 2 Electromagnetic Levitation





9 5.1. Design Alternatives 9 1.Single Electromagnet with Hall Effect Sensor 2. Double Electromagnet Design 3. Multiple Coil Parallel Arrangement
 1.")
10 5.2. Chassis Design 10 Design evolution of the chassis Material Mass (kg) Cost Aluminum $235 ABS Plastic 1.50 $675 Wood (Birch Ply) 1.20 $126 Material options for the chassis
11 6. Control System 11 Input Desired Position + _ Error Current Controller Actual Plant Position Unity Feedback System
12 6.1. Plant Subsystem 12 Current Levitation Position Change Sensor Voltage Output Breakdown of the Plant System

13 Electromagnet Design Requirements 13 Air Gap, X = 20 mm, Object Mass = 20 g, F object = N Coil Turnings, N = 1000 For pole D = 3 cm, A= πd2 = m2 4 Permeability of free space, μ o = 4π 10 7 V s A m
 Dia. 0.65 Coil Turnings 1000 ~2000 Field Strength 0.")
14 Electromagnet Selection 14 Height of the electromagnet Design Criteria 12 VDC Pneumatic Solenoid < 7 cm 3.65 cm Core Diameter 3 cm 2 cm Cu wire gage Max. 22 (Dia ) Dia Coil Turnings 1000 ~2000 Field Strength wb/m 2 -Satisfactory Test Results -No heat issues Assessment of 12 VDC Pneumatic Solenoid based on design requirements

15 6.1. Plant Subsystem 15 Current Levitation Position Change Sensor Voltage Output Breakdown of the Plant System Hall Effect Sensor
16 16 Sensor Component Hall Effect Sensor Analog position sensor (Solid State Type SS49 Series) Size: 30 x 4 x 2 mm Range of Detection: up to 4 cm Unit Cost: $2.50 Picture Courtesy of Honeywell.

17 Design Refinement 17 Initial Design Final Design Addition of new Hall Effect Sensor to differentiate Electromagnet signal

18 18 Sensor Testing
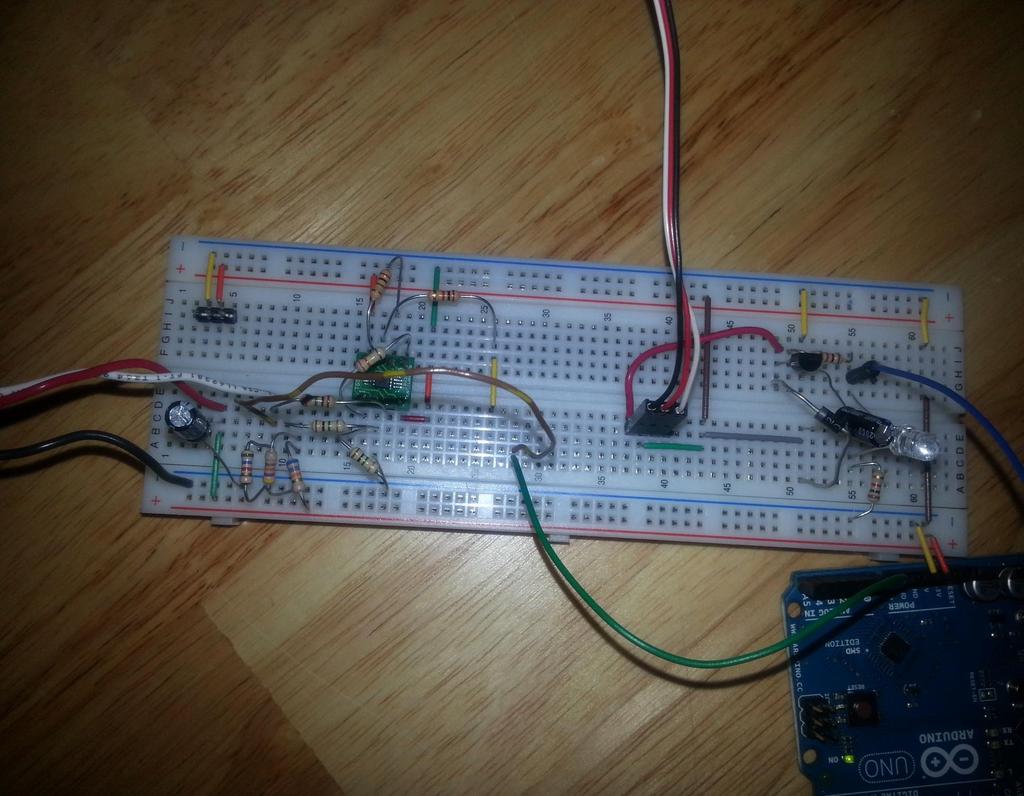
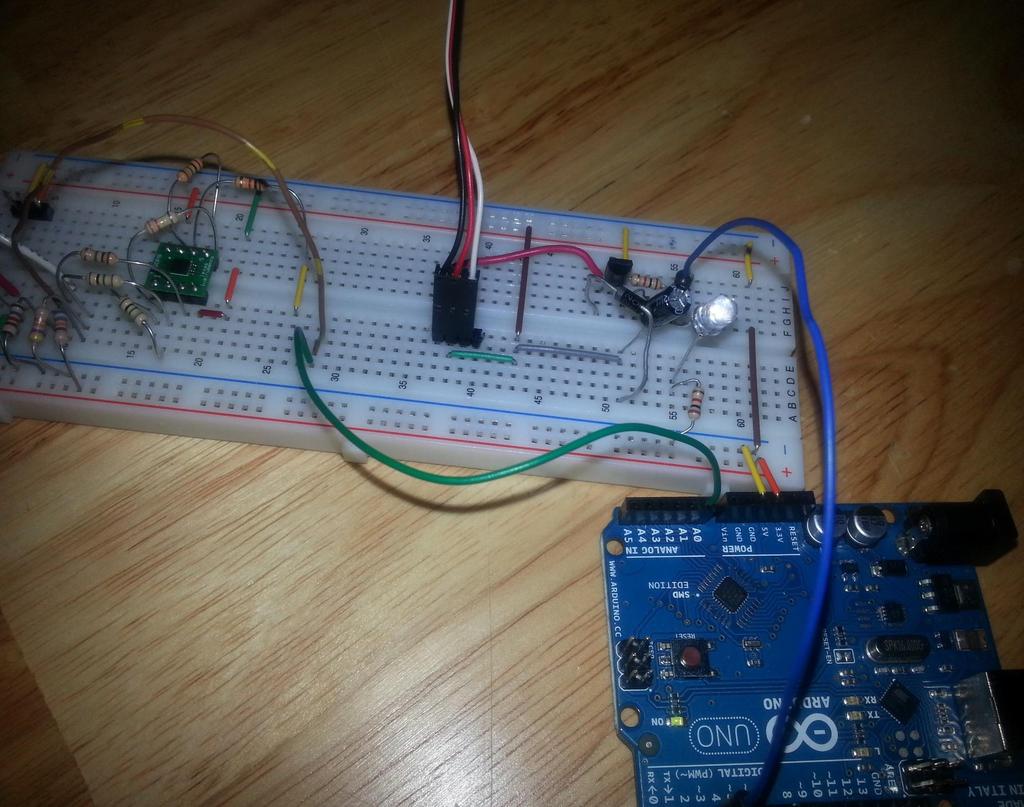
19 Sensor Circuit Design 19 Circuit for Differential Amplification of Sensor Ouput

20 6.1. Plant Subsystem 20 Current Levitation Position Change Sensor Measurement Voltage Output Sensor Calibration Actual Position 2 Hall Effect Sensors
21 Sensor Voltage (V) 21 Position Sensor Calibration 3.50 Hall Effect Sensor Calibration Actual Distance (mm)
22 6.3. Control System 22 Input Desired Position + _ Error Current Controller Actual Plant Position Unity Feedback System

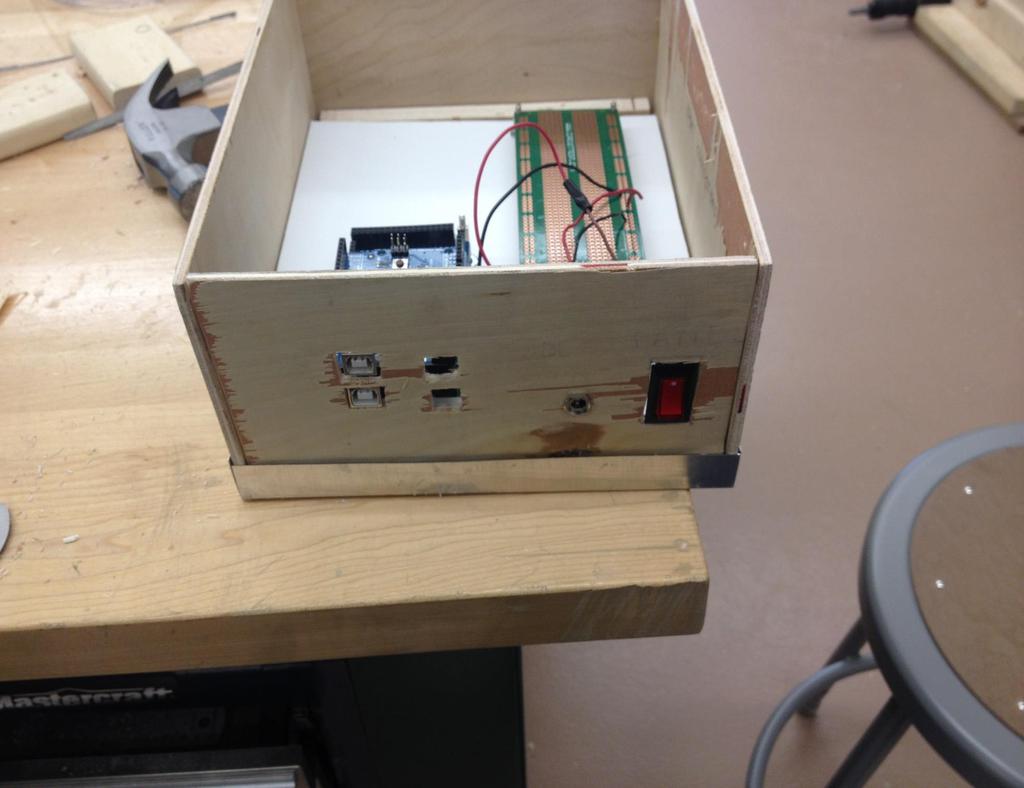
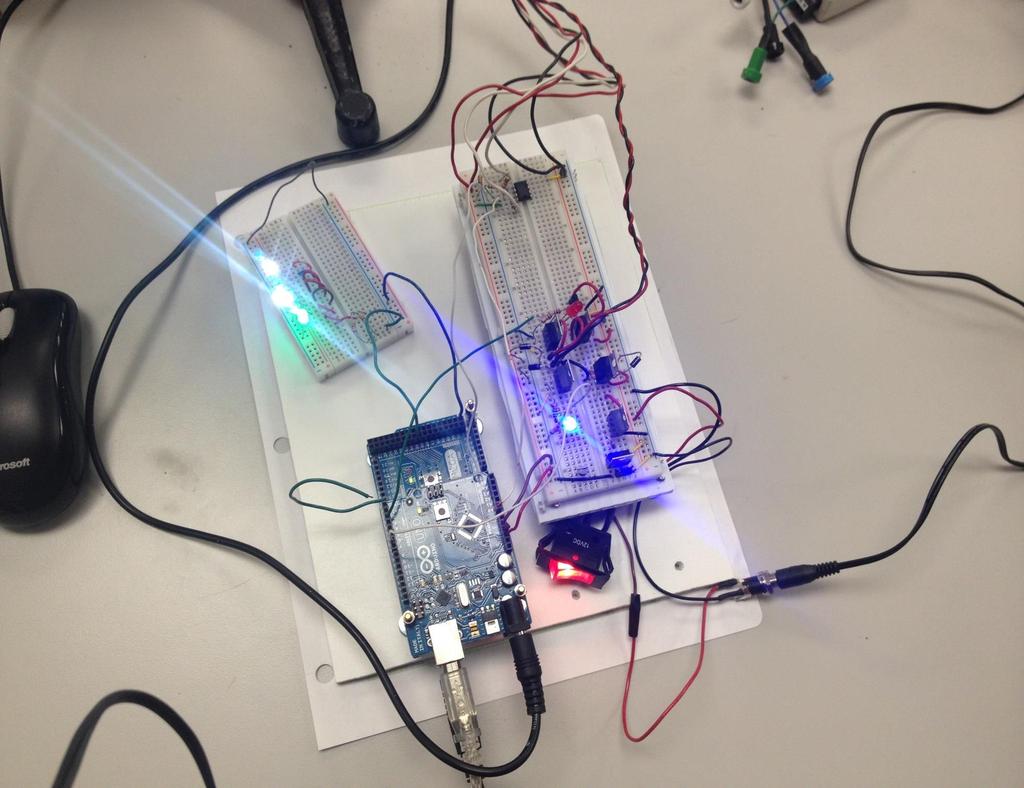
23 Controller Component Microcontroller - Arduino Mega Hardware serial ports for communication with MATLAB Runs control algorithms Cost: $55 Picture Courtesy of Arduino



24 7. System Implementation 24 Receive Data Levitation Control Serial Communication Arduino & Real Time Arduino uses feedback data from sensors to manipulate position MATLAB & Arduino Manipulation of control parameters Retrieval of feedback data
25 25 8. PID Controller
26 26 8. Budget ELECTRONICS CHASSIS Materials Unit Cost Amount Cost Arduino $ $ Hall Effect Sensor $ $42.78 Potentiometer $ $54.80 Operation Amplifier $ $3.20 Power Supply Unit $ $77.42 Neodymium Magnet $ $4.99 USB Cable $ $12.00 Electromagnet $ $38.97 Other Parts - - $55.51 Wood (61 x 121 x 2.5 cm ) $ $18.45 Acrylic glass $ $27.98 Aluminum sheet $ $15.93 Other Parts - - $22.38 Sub Total $ Summary of Materials Cost
27 8. Budget 27 Sub Total $ Total Shipping $85.11 Total Taxes $65.14 Contributions -$ Total $ Summary of Budget
28 28 9. Assessing Requirements Demonstrative Requirements Levitate object magnetically ~ Compare desired and measured controller variables Lag, lead, lag-lead compensation techniques P, PI, and PID control User Requirements Graphical User Interface (GUI) to interact with device Plug n Play Safe and Ergonomic
29 9. Assessing Requirements 29 Visual Requirements Viewable from ft. back of the classroom Levitate the object at least 2-4 cm away from the coil Power Requirements Conventional 120 VAC input No potential electrical risk to the user Operating Budget $1,500
30 10. Future Considerations 30 Build more powerful electromagnet or add an extra electromagnet to repel the levitated object Might increase the range of levitation. Implementation of lag, lead, and lag-lead compensator. Use different microcontroller capable of serial or other form of communication without effecting the frequency of the feedback signal. Use different interface instead of MATLAB for example LabView
31 Acknowledgements 31 Dr. Y.J. Pan Mechanical Dept. Professor Dr. Timothy Little Electrical Dept. Professor Al-Mokhtar O. Mohamed Post-Doctoral Position Mech. Dept. Jonathan MacDonald Electrical Technician Angus MacPherson Mechanical Technician Reg Peters Wood Workshop Technician
32 32 Thank You & Questions?
33
34
35
36

37
38
39
40 References 40 Arduino UNO webpage. Retrieved Mar. 30, 2014 ATmega238 datasheet. Retrieved Mar. 30, 2014 Honeywell SS49 datasheet. Retrieved Mar. 30, 2014 "RobotShop : The World's Leading Robot Store." RobotShop. N.p., n.d. Sun. Mar. 30, 2014 MathWorks MATLAB/Simulink website. Retrieved Mar. 30, 2014 Mikonikuv Blog, Arduino Magnet Levitation detailed description. Retrieved Nov. 20, 2013 Williams, Lance. "Electromagnetic Levitation Thesis." N.p., Web. 28 Oct
41 Control System Question

42 System Model Ball Model: Static equilibrium: mg = C i o 2 x o 2 Inverse Square Law! Magnetic Plant Constant: C = mgx o 2 2 = Nm2 i o A 2 Linearization of electromagnetic force using Taylor series approximation: C i2 =C i o C 2i o x 2 x 2 o x 3 x x o + C o C i2 2 2 =C i o C 2i o x 2 x 2 o 2 2 x o 3 x C 2i o x o 2 i 2i o x o 2 (i i o) Force Balance F net = ma, mx = mg F Electromagnetic Force F(i, x) = C i2 x 2 For change in position, x = x x o mx C mx = mg C i2 2i o 2 x o 3 x 2 x = C 2i o x o 2 Thus, the differential equation: x 3695 x = 63 i s 2 X s 26.59X s = I s X s I s = s m o = 0.02 kg, x o = 0.02 m, i o = A i
43 System Model Electromagnet Model Electromagnetic coil driving circuit
44 System Model Simplified Circuit Electromagnet Model V in L di V in L d dt Laplace transform: V in (s) Rearranging the equation V out = V in dt V out = 0 V out R V out = 0 Ls R + 1 V out(s) = 0 1 L R s + 1 Finally, V out = I R : L = 87 mh, R = 17.5 Ω I V in = 1 R = L R s s + 1
45 Control Systems Electromagnet Voltage Input Plant (Levitation) Position Change Ball Combination of Electromagnet & Ball Model I s X s I s V s Thus, the uncompensated system OLTF = X s = V s X s V s = s s Note: Negative controller gain is required
MAGNETIC LEVITATION DEMONSTRATION APPARATUS
 MAGNETIC LEVITATION DEMONSTRATION APPARATUS TEAM 11 FALL TERM PRESENTATION Fuyuan Lin, Marlon McCombie, Ajay Puppala, Xiaodong Wang Project Supervisor : Dr. Robert Bauer Project Coordinator : Dr. Clifton
MAGNETIC LEVITATION DEMONSTRATION APPARATUS TEAM 11 FALL TERM PRESENTATION Fuyuan Lin, Marlon McCombie, Ajay Puppala, Xiaodong Wang Project Supervisor : Dr. Robert Bauer Project Coordinator : Dr. Clifton
California University of Pennsylvania Department of Applied Engineering & Technology Electrical Engineering Technology
 California University of Pennsylvania Department of Applied Engineering & Technology Electrical Engineering Technology < Use as a guide Do not copy and paste> EET 410 Design of Feedback Control Systems
California University of Pennsylvania Department of Applied Engineering & Technology Electrical Engineering Technology < Use as a guide Do not copy and paste> EET 410 Design of Feedback Control Systems
العطاء رقم )7106/67( الخاص بشراء أجهز لقسم الهندسة الكهربائية على حساب البحث العلمي
7106/67( الخاص بشراء أجهز لقسم الهندسة الكهربائية على حساب البحث العلمي") العطاء رقم )7106/67( الخاص بشراء أجهز لقسم الهندسة الكهربائية على حساب البحث العلمي رقم )7107/363( Page 1 of 6 1- Mechatronics Actuators Board & Mechatronics Systems Board with Education Laboratory for
العطاء رقم )7106/67( الخاص بشراء أجهز لقسم الهندسة الكهربائية على حساب البحث العلمي رقم )7107/363( Page 1 of 6 1- Mechatronics Actuators Board & Mechatronics Systems Board with Education Laboratory for
Magnetic Levitation System
 Magnetic Levitation System Electromagnet Infrared LED Phototransistor Levitated Ball Magnetic Levitation System K. Craig 1 Magnetic Levitation System Electromagnet Emitter Infrared LED i Detector Phototransistor
Magnetic Levitation System Electromagnet Infrared LED Phototransistor Levitated Ball Magnetic Levitation System K. Craig 1 Magnetic Levitation System Electromagnet Emitter Infrared LED i Detector Phototransistor
ME375 Lab Project. Bradley Boane & Jeremy Bourque April 25, 2018
 ME375 Lab Project Bradley Boane & Jeremy Bourque April 25, 2018 Introduction: The goal of this project was to build and program a two-wheel robot that travels forward in a straight line for a distance
ME375 Lab Project Bradley Boane & Jeremy Bourque April 25, 2018 Introduction: The goal of this project was to build and program a two-wheel robot that travels forward in a straight line for a distance
MAGNETIC LEVITATION SUSPENSION CONTROL SYSTEM FOR REACTION WHEEL
 IMPACT: International Journal of Research in Engineering & Technology (IMPACT: IJRET) ISSN 2321-8843 Vol. 1, Issue 4, Sep 2013, 1-6 Impact Journals MAGNETIC LEVITATION SUSPENSION CONTROL SYSTEM FOR REACTION
IMPACT: International Journal of Research in Engineering & Technology (IMPACT: IJRET) ISSN 2321-8843 Vol. 1, Issue 4, Sep 2013, 1-6 Impact Journals MAGNETIC LEVITATION SUSPENSION CONTROL SYSTEM FOR REACTION
Low-Cost hardware connectivity with Simulink MATLAB-Day RWTH Aachen Sebastian Groß October 24th, 2013
 Low-Cost hardware connectivity with Simulink MATLAB-Day RWTH Aachen Sebastian Groß October 24th, 2013 2013 The MathWorks, Inc. 1 LEGO Mindstorms NXT: a first demo EDUCON 2013, Berlin, Germany 2 A first
Low-Cost hardware connectivity with Simulink MATLAB-Day RWTH Aachen Sebastian Groß October 24th, 2013 2013 The MathWorks, Inc. 1 LEGO Mindstorms NXT: a first demo EDUCON 2013, Berlin, Germany 2 A first
6.302 Feedback Systems
 MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Electrical Engineering and Computer Science 6.302 Feedback Systems Fall Term 2003 Issued : November 18, 2003 Lab 3 Maglev Project Due : Friday, December
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Electrical Engineering and Computer Science 6.302 Feedback Systems Fall Term 2003 Issued : November 18, 2003 Lab 3 Maglev Project Due : Friday, December
Development of An Experimental Setup for the Altitude Control of A Ball in A Pipe Şeyma AKYÜREK 1,a,GizemSezin ÖZDEN 1,b, Coşku KASNAKOĞLU 1,c
 Applied Mechanics and Materials Vols. 789-790 (2015) pp 1016-1020 (2015) Trans Tech Publications, Switzerland doi:10.4028/www.scientific.net/amm.789-790.1016 Development of An Experimental Setup for the
Applied Mechanics and Materials Vols. 789-790 (2015) pp 1016-1020 (2015) Trans Tech Publications, Switzerland doi:10.4028/www.scientific.net/amm.789-790.1016 Development of An Experimental Setup for the
Addendum Handout for the ECE3510 Project. The magnetic levitation system that is provided for this lab is a non-linear system.
 Addendum Handout for the ECE3510 Project The magnetic levitation system that is provided for this lab is a non-linear system. Because of this fact, it should be noted that the associated ideal linear responses
Addendum Handout for the ECE3510 Project The magnetic levitation system that is provided for this lab is a non-linear system. Because of this fact, it should be noted that the associated ideal linear responses
Mag Lev Train 1. By: Paul Friend. Project Advisor: Dr. Anakwa. Date:
 Mag Lev Train 1 By: Paul Friend Project Advisor: Dr. Anakwa Date: October 28, 2003 The Mag Lev Train 1 project is to design and implement an active levitation, guidance, and propulsion system for a model
Mag Lev Train 1 By: Paul Friend Project Advisor: Dr. Anakwa Date: October 28, 2003 The Mag Lev Train 1 project is to design and implement an active levitation, guidance, and propulsion system for a model
A FAULT TOLERANT CONTROL APPROACH TO MAGNETIC LEVITATION
 James Ballard 2014 A FAULT TOLERANT CONTROL APPROACH TO MAGNETIC LEVITATION MEng Electronic Engineering First Supervisor: Prof. R.J.Patton Second Supervisor: Dr. W.Ahmad i. Abstract This paper documents
James Ballard 2014 A FAULT TOLERANT CONTROL APPROACH TO MAGNETIC LEVITATION MEng Electronic Engineering First Supervisor: Prof. R.J.Patton Second Supervisor: Dr. W.Ahmad i. Abstract This paper documents
Please Handle Carefully!
 ELEC 3004/7312: Digital Linear Systems: Signals & Control! Prac/Lab 3 LeviLab: Part I: System Modelling May 2, 2017 by S. Singh, C. Reiger and I. Clough Pre-Lab This laboratory considers system modelling
ELEC 3004/7312: Digital Linear Systems: Signals & Control! Prac/Lab 3 LeviLab: Part I: System Modelling May 2, 2017 by S. Singh, C. Reiger and I. Clough Pre-Lab This laboratory considers system modelling
Using Magnetic Sensors for Absolute Position Detection and Feedback. Kevin Claycomb University of Evansville
 Using Magnetic Sensors for Absolute Position Detection and Feedback. Kevin Claycomb University of Evansville Using Magnetic Sensors for Absolute Position Detection and Feedback. Abstract Several types
Using Magnetic Sensors for Absolute Position Detection and Feedback. Kevin Claycomb University of Evansville Using Magnetic Sensors for Absolute Position Detection and Feedback. Abstract Several types
FlexLab and LevLab: A Portable Lab for Dynamics and Control Teaching
 FlexLab and LevLab: A Portable Lab for Dynamics and Control Teaching Lei Zhou, Mohammad Imani Nejad, David L. Trumper Department of Mechanical Engineering, Massachusetts Institute of Technology, Cambridge,
FlexLab and LevLab: A Portable Lab for Dynamics and Control Teaching Lei Zhou, Mohammad Imani Nejad, David L. Trumper Department of Mechanical Engineering, Massachusetts Institute of Technology, Cambridge,
MathWorks Announces Built-in Simulink Support for Arduino, BeagleBoard, and LEGO MINDSTORMS NXT
 MathWorks Announces Built-in Simulink Support for Arduino, BeagleBoard, and LEGO MINDSTORMS NXT With one click, engineers run Simulink control system and signal processing algorithms in hardware http://www.mathworks.com/company/newsroom/mathworks-announces-built-in-simulink-
MathWorks Announces Built-in Simulink Support for Arduino, BeagleBoard, and LEGO MINDSTORMS NXT With one click, engineers run Simulink control system and signal processing algorithms in hardware http://www.mathworks.com/company/newsroom/mathworks-announces-built-in-simulink-
Figure 1: Unity Feedback System. The transfer function of the PID controller looks like the following:
 Islamic University of Gaza Faculty of Engineering Electrical Engineering department Control Systems Design Lab Eng. Mohammed S. Jouda Eng. Ola M. Skeik Experiment 3 PID Controller Overview This experiment
Islamic University of Gaza Faculty of Engineering Electrical Engineering department Control Systems Design Lab Eng. Mohammed S. Jouda Eng. Ola M. Skeik Experiment 3 PID Controller Overview This experiment
Penn State Erie, The Behrend College School of Engineering
 Penn State Erie, The Behrend College School of Engineering EE BD 327 Signals and Control Lab Spring 2008 Lab 9 Ball and Beam Balancing Problem April 10, 17, 24, 2008 Due: May 1, 2008 Number of Lab Periods:
Penn State Erie, The Behrend College School of Engineering EE BD 327 Signals and Control Lab Spring 2008 Lab 9 Ball and Beam Balancing Problem April 10, 17, 24, 2008 Due: May 1, 2008 Number of Lab Periods:
Application example. Measuring Force Sensors Rigid. Six series Nano, Mini, Gamma, Delta, Theta, Omega. Range of measurement, force ± 36 N..
 Six series Nano, Mini, Gamma, Delta, Theta, Omega Range of measurement, force ± 36 N.. ± 40000 N Range of measurement, moment ± 0.5 Nm.. ± 6000 Nm Application example Robot-supported chamfering of round
Six series Nano, Mini, Gamma, Delta, Theta, Omega Range of measurement, force ± 36 N.. ± 40000 N Range of measurement, moment ± 0.5 Nm.. ± 6000 Nm Application example Robot-supported chamfering of round
Industrial Control Equipment. ACS-1000 Analog Control System
 Analog Control System, covered with many technical disciplines, explicates the central significance of Analog Control System. This applies particularly in mechanical and electrical engineering, and as
Analog Control System, covered with many technical disciplines, explicates the central significance of Analog Control System. This applies particularly in mechanical and electrical engineering, and as
Cornerstone Electronics Technology and Robotics I Week 17 Magnetism Tutorial
 Cornerstone Electronics Technology and Robotics I Week 17 Magnetism Tutorial Administration: o Prayer o Voltage Divider Review: Divide +9 V source in half using 1K resistors. Solve for current. Electricity
Cornerstone Electronics Technology and Robotics I Week 17 Magnetism Tutorial Administration: o Prayer o Voltage Divider Review: Divide +9 V source in half using 1K resistors. Solve for current. Electricity
DC SERVO MOTOR CONTROL SYSTEM
 DC SERVO MOTOR CONTROL SYSTEM MODEL NO:(PEC - 00CE) User Manual Version 2.0 Technical Clarification /Suggestion : / Technical Support Division, Vi Microsystems Pvt. Ltd., Plot No :75,Electronics Estate,
DC SERVO MOTOR CONTROL SYSTEM MODEL NO:(PEC - 00CE) User Manual Version 2.0 Technical Clarification /Suggestion : / Technical Support Division, Vi Microsystems Pvt. Ltd., Plot No :75,Electronics Estate,
IT.MLD900 SENSORS AND TRANSDUCERS TRAINER. Signal Conditioning
 SENSORS AND TRANSDUCERS TRAINER IT.MLD900 The s and Instrumentation Trainer introduces students to input sensors, output actuators, signal conditioning circuits, and display devices through a wide range
SENSORS AND TRANSDUCERS TRAINER IT.MLD900 The s and Instrumentation Trainer introduces students to input sensors, output actuators, signal conditioning circuits, and display devices through a wide range
push-pole (2014) design / implementation /technical information
 design / implementation /technical information") push-pole (2014) design / implementation /technical information www.nolanlem.com The intention of this document is to highlight the considerations that went into the technical, spatial, temporal, and aesthetic
push-pole (2014) design / implementation /technical information www.nolanlem.com The intention of this document is to highlight the considerations that went into the technical, spatial, temporal, and aesthetic
Figure 4.1 Vector representation of magnetic field.
 Chapter 4 Design of Vector Magnetic Field Sensor System 4.1 3-Dimensional Vector Field Representation The vector magnetic field is represented as a combination of three components along the Cartesian coordinate
Chapter 4 Design of Vector Magnetic Field Sensor System 4.1 3-Dimensional Vector Field Representation The vector magnetic field is represented as a combination of three components along the Cartesian coordinate
 Code No: M0326 /R07 Set No. 1 1. Define Mechatronics and explain the application of Mechatronics in CNC Machine tools and Computer Integrated Manufacturing (CIM). 2. (a) What are the various Filters that
Code No: M0326 /R07 Set No. 1 1. Define Mechatronics and explain the application of Mechatronics in CNC Machine tools and Computer Integrated Manufacturing (CIM). 2. (a) What are the various Filters that
PE Electrical Machine / Power Electronics. Power Electronics Training System. ufeatures. } List of Experiments
 Electrical Machine / Power Electronics PE-5000 Power Electronics Training System The PE-5000 Power Electronics Training System consists of 28 experimental modules, a three-phase squirrel cage motor, load,
Electrical Machine / Power Electronics PE-5000 Power Electronics Training System The PE-5000 Power Electronics Training System consists of 28 experimental modules, a three-phase squirrel cage motor, load,
Closed-Loop Transportation Simulation. Outlines
 Closed-Loop Transportation Simulation Deyang Zhao Mentor: Unnati Ojha PI: Dr. Mo-Yuen Chow Aug. 4, 2010 Outlines 1 Project Backgrounds 2 Objectives 3 Hardware & Software 4 5 Conclusions 1 Project Background
Closed-Loop Transportation Simulation Deyang Zhao Mentor: Unnati Ojha PI: Dr. Mo-Yuen Chow Aug. 4, 2010 Outlines 1 Project Backgrounds 2 Objectives 3 Hardware & Software 4 5 Conclusions 1 Project Background
Quanser Products and solutions
 Quanser Products and solutions with NI LabVIEW From Classic Control to Complex Mechatronic Systems Design www.quanser.com Your first choice for control systems experiments For twenty five years, institutions
Quanser Products and solutions with NI LabVIEW From Classic Control to Complex Mechatronic Systems Design www.quanser.com Your first choice for control systems experiments For twenty five years, institutions
MODEL BASED DESIGN OF PID CONTROLLER FOR BLDC MOTOR WITH IMPLEMENTATION OF EMBEDDED ARDUINO MEGA CONTROLLER
 www.arpnjournals.com MODEL BASED DESIGN OF PID CONTROLLER FOR BLDC MOTOR WITH IMPLEMENTATION OF EMBEDDED ARDUINO MEGA CONTROLLER M.K.Hat 1, B.S.K.K. Ibrahim 1, T.A.T. Mohd 2 and M.K. Hassan 2 1 Department
www.arpnjournals.com MODEL BASED DESIGN OF PID CONTROLLER FOR BLDC MOTOR WITH IMPLEMENTATION OF EMBEDDED ARDUINO MEGA CONTROLLER M.K.Hat 1, B.S.K.K. Ibrahim 1, T.A.T. Mohd 2 and M.K. Hassan 2 1 Department
A two-wire pressure transmitter (current loop) for 4 20 ma AMS 4712
 for 4 20 ma AMS 4712") A two-wire pressure transmitter (current loop) for 4 20 ma Figure 1: pressure transmitter* AMS 4712 with a two-wire current output Although digital transmission has become standard in electronic devices,
A two-wire pressure transmitter (current loop) for 4 20 ma Figure 1: pressure transmitter* AMS 4712 with a two-wire current output Although digital transmission has become standard in electronic devices,
MAGNETOSCOP Measurement of magnetic field strengths in the range 0.1 nanotesla to 1 millitesla
 MAGNETOSCOP Measurement of magnetic field strengths in the range 0.1 nanotesla to 1 millitesla Extremely high sensitivity of 0.1 nanotesla with field and gradient probe Measurement of material permeabilities
MAGNETOSCOP Measurement of magnetic field strengths in the range 0.1 nanotesla to 1 millitesla Extremely high sensitivity of 0.1 nanotesla with field and gradient probe Measurement of material permeabilities
2.017 DESIGN OF ELECTROMECHANICAL ROBOTIC SYSTEMS Fall 2009 Lab 4: Motor Control. October 5, 2009 Dr. Harrison H. Chin
 2.017 DESIGN OF ELECTROMECHANICAL ROBOTIC SYSTEMS Fall 2009 Lab 4: Motor Control October 5, 2009 Dr. Harrison H. Chin Formal Labs 1. Microcontrollers Introduction to microcontrollers Arduino microcontroller
2.017 DESIGN OF ELECTROMECHANICAL ROBOTIC SYSTEMS Fall 2009 Lab 4: Motor Control October 5, 2009 Dr. Harrison H. Chin Formal Labs 1. Microcontrollers Introduction to microcontrollers Arduino microcontroller
SECTION 6: ROOT LOCUS DESIGN
 SECTION 6: ROOT LOCUS DESIGN MAE 4421 Control of Aerospace & Mechanical Systems 2 Introduction Introduction 3 Consider the following unity feedback system 3 433 Assume A proportional controller Design
SECTION 6: ROOT LOCUS DESIGN MAE 4421 Control of Aerospace & Mechanical Systems 2 Introduction Introduction 3 Consider the following unity feedback system 3 433 Assume A proportional controller Design
PID CONTROLLERS DESIGN APPLIED TO POSITIONING OF BALL ON THE STEWART PLATFORM
 DOI 1.2478/ama-214-39 PID CONTROLLERS DESIGN APPLIED TO POSITIONING OF BALL ON THE STEWART PLATFORM Andrzej KOSZEWNIK *, Kamil TROC *, Maciej SŁOWIK * * Faculty of Mechanical Engineering, Bialystok University
DOI 1.2478/ama-214-39 PID CONTROLLERS DESIGN APPLIED TO POSITIONING OF BALL ON THE STEWART PLATFORM Andrzej KOSZEWNIK *, Kamil TROC *, Maciej SŁOWIK * * Faculty of Mechanical Engineering, Bialystok University
WIND VANE THIES COMPACT
 WIND VANE THIES COMPACT ORDER - N O ELECTRICAL OUTPUT ELECTRICAL SUPPLY HEATING SUPPLY MODEL IN EOL MANAGER 4.3129.00.712 Pot: 2 kω 4.3129.10.712 Pot: 2 kω 4.3129.00.012A 4.3129.10.012A Pot: 2 kω Pot:
WIND VANE THIES COMPACT ORDER - N O ELECTRICAL OUTPUT ELECTRICAL SUPPLY HEATING SUPPLY MODEL IN EOL MANAGER 4.3129.00.712 Pot: 2 kω 4.3129.10.712 Pot: 2 kω 4.3129.00.012A 4.3129.10.012A Pot: 2 kω Pot:
COMPARATIVE STUDY OF PID AND FUZZY CONTROLLER ON EMBEDDED COMPUTER FOR WATER LEVEL CONTROL
 COMPARATIVE STUDY OF PID AND FUZZY CONTROLLER ON EMBEDDED COMPUTER FOR WATER LEVEL CONTROL A G Suresh 1, Jyothish Kumar S Y 2, Pradipkumar Dixit 3 1 Research scholar Jain university, Associate Prof of
COMPARATIVE STUDY OF PID AND FUZZY CONTROLLER ON EMBEDDED COMPUTER FOR WATER LEVEL CONTROL A G Suresh 1, Jyothish Kumar S Y 2, Pradipkumar Dixit 3 1 Research scholar Jain university, Associate Prof of
Magnetic Bearing Literature Review. Team 2: The Floaters. Ivett Ortega, Wole Oyelola, Claudia Vargas
 Magnetic Bearing Literature Review Team 2: The Floaters Ivett Ortega, Wole Oyelola, Claudia Vargas Our project is to create a semi-frictionless bearing that is controlled by a feedback control system.
Magnetic Bearing Literature Review Team 2: The Floaters Ivett Ortega, Wole Oyelola, Claudia Vargas Our project is to create a semi-frictionless bearing that is controlled by a feedback control system.
Digital Control of MS-150 Modular Position Servo System
 IEEE NECEC Nov. 8, 2007 St. John's NL 1 Digital Control of MS-150 Modular Position Servo System Farid Arvani, Syeda N. Ferdaus, M. Tariq Iqbal Faculty of Engineering, Memorial University of Newfoundland
IEEE NECEC Nov. 8, 2007 St. John's NL 1 Digital Control of MS-150 Modular Position Servo System Farid Arvani, Syeda N. Ferdaus, M. Tariq Iqbal Faculty of Engineering, Memorial University of Newfoundland
ULS24 Frequently Asked Questions
 List of Questions 1 1. What type of lens and filters are recommended for ULS24, where can we source these components?... 3 2. Are filters needed for fluorescence and chemiluminescence imaging, what types
List of Questions 1 1. What type of lens and filters are recommended for ULS24, where can we source these components?... 3 2. Are filters needed for fluorescence and chemiluminescence imaging, what types
Laboratory of Advanced Simulations
 XXIX. ASR '2004 Seminar, Instruments and Control, Ostrava, April 30, 2004 333 Laboratory of Advanced Simulations WAGNEROVÁ, Renata Ing., Ph.D., Katedra ATŘ-352, VŠB-TU Ostrava, 17. listopadu, Ostrava -
XXIX. ASR '2004 Seminar, Instruments and Control, Ostrava, April 30, 2004 333 Laboratory of Advanced Simulations WAGNEROVÁ, Renata Ing., Ph.D., Katedra ATŘ-352, VŠB-TU Ostrava, 17. listopadu, Ostrava -
A COMPARISON STUDY OF THE COMMUTATION METHODS FOR THE THREE-PHASE PERMANENT MAGNET BRUSHLESS DC MOTOR
 A COMPARISON STUDY OF THE COMMUTATION METHODS FOR THE THREE-PHASE PERMANENT MAGNET BRUSHLESS DC MOTOR Shiyoung Lee, Ph.D. Pennsylvania State University Berks Campus Room 120 Luerssen Building, Tulpehocken
A COMPARISON STUDY OF THE COMMUTATION METHODS FOR THE THREE-PHASE PERMANENT MAGNET BRUSHLESS DC MOTOR Shiyoung Lee, Ph.D. Pennsylvania State University Berks Campus Room 120 Luerssen Building, Tulpehocken
 1 CHAPTER 1 INTRODUCTION This chapter 1 is contains about the introduction of the project where it involve of the objectives, problem statements, scope, methodology, and report structure. 1.1 Background
1 CHAPTER 1 INTRODUCTION This chapter 1 is contains about the introduction of the project where it involve of the objectives, problem statements, scope, methodology, and report structure. 1.1 Background
Position Control of a Hydraulic Servo System using PID Control
 Position Control of a Hydraulic Servo System using PID Control ABSTRACT Dechrit Maneetham Mechatronics Engineering Program Rajamangala University of Technology Thanyaburi Pathumthani, THAIAND. (E-mail:Dechrit_m@hotmail.com)
Position Control of a Hydraulic Servo System using PID Control ABSTRACT Dechrit Maneetham Mechatronics Engineering Program Rajamangala University of Technology Thanyaburi Pathumthani, THAIAND. (E-mail:Dechrit_m@hotmail.com)
P15661 Reciprocating Friction Tester Base Subsystem
 P15661 Reciprocating Friction Tester Base Subsystem 1 P R E L I M I N A R Y D E T A I L E D D E S I G N R E V I E W 11/20/2014 Team Roles 2 Team Member Major Subsystem Role Alexandra Woodward Industrial
P15661 Reciprocating Friction Tester Base Subsystem 1 P R E L I M I N A R Y D E T A I L E D D E S I G N R E V I E W 11/20/2014 Team Roles 2 Team Member Major Subsystem Role Alexandra Woodward Industrial
Electronics and Instrumentation Name ENGR-4220 Fall 1999 Section Modeling the Cantilever Beam Supplemental Info for Project 1.
 Name ENGR-40 Fall 1999 Section Modeling the Cantilever Beam Supplemental Info for Project 1 The cantilever beam has a simple equation of motion. If we assume that the mass is located at the end of the
Name ENGR-40 Fall 1999 Section Modeling the Cantilever Beam Supplemental Info for Project 1 The cantilever beam has a simple equation of motion. If we assume that the mass is located at the end of the
Lab 5: Inverted Pendulum PID Control
 Lab 5: Inverted Pendulum PID Control In this lab we will be learning about PID (Proportional Integral Derivative) control and using it to keep an inverted pendulum system upright. We chose an inverted
Lab 5: Inverted Pendulum PID Control In this lab we will be learning about PID (Proportional Integral Derivative) control and using it to keep an inverted pendulum system upright. We chose an inverted
Design and Development of Novel Two Axis Servo Control Mechanism
 Design and Development of Novel Two Axis Servo Control Mechanism Shailaja Kurode, Chinmay Dharmadhikari, Mrinmay Atre, Aniruddha Katti, Shubham Shambharkar Abstract This paper presents design and development
Design and Development of Novel Two Axis Servo Control Mechanism Shailaja Kurode, Chinmay Dharmadhikari, Mrinmay Atre, Aniruddha Katti, Shubham Shambharkar Abstract This paper presents design and development
OPERATION AND MAINTENANCE MANUAL TRIAXIAL ACCELEROMETER MODEL PA-23 STOCK NO
 OPERATION AND MAINTENANCE MANUAL TRIAXIAL ACCELEROMETER MODEL PA-23 STOCK NO. 990-60700-9801 GEOTECH INSTRUMENTS, LLC 10755 SANDEN DRIVE DALLAS, TEXAS 75238-1336 TEL: (214) 221-0000 FAX: (214) 343-4400
OPERATION AND MAINTENANCE MANUAL TRIAXIAL ACCELEROMETER MODEL PA-23 STOCK NO. 990-60700-9801 GEOTECH INSTRUMENTS, LLC 10755 SANDEN DRIVE DALLAS, TEXAS 75238-1336 TEL: (214) 221-0000 FAX: (214) 343-4400
Mini-MAG Positioning Products
 Mini-MAG Positioning Products Miniature Linear Stage The Mini-MAG (MMG and MMX) line of miniature linear stages blends the ultimate in performance, reliability, and value, delivering nearly twice the accuracy
Mini-MAG Positioning Products Miniature Linear Stage The Mini-MAG (MMG and MMX) line of miniature linear stages blends the ultimate in performance, reliability, and value, delivering nearly twice the accuracy
Introduction to Arduino HW Labs
 Introduction to Arduino HW Labs In the next six lab sessions, you ll attach sensors and actuators to your Arduino processor This session provides an overview for the devices LED indicators Text/Sound Output
Introduction to Arduino HW Labs In the next six lab sessions, you ll attach sensors and actuators to your Arduino processor This session provides an overview for the devices LED indicators Text/Sound Output
Inductance of solenoids with Cobra3
 Inductance of solenoids with Cobra3 TEP Related topics Law of inductance, Lenz s law, self-inductance, solenoids, transformer, oscillatory circuit, resonance, damped oscillation, logarithmic decrement,
Inductance of solenoids with Cobra3 TEP Related topics Law of inductance, Lenz s law, self-inductance, solenoids, transformer, oscillatory circuit, resonance, damped oscillation, logarithmic decrement,
SonaFlex. Set of Portable Multifunctional Equipment for Non-contact Ultrasonic Examination of Materials
 SonaFlex Set of Portable Multifunctional Equipment for Non-contact Ultrasonic Examination of Materials General Overview of the Testing Equipment SonaFlex is a unique intelligent ultrasonic testing system
SonaFlex Set of Portable Multifunctional Equipment for Non-contact Ultrasonic Examination of Materials General Overview of the Testing Equipment SonaFlex is a unique intelligent ultrasonic testing system
TigreSAT 2010 &2011 June Monthly Report
 2010-2011 TigreSAT Monthly Progress Report EQUIS ADS 2010 PAYLOAD No changes have been done to the payload since it had passed all the tests, requirements and integration that are necessary for LSU HASP
2010-2011 TigreSAT Monthly Progress Report EQUIS ADS 2010 PAYLOAD No changes have been done to the payload since it had passed all the tests, requirements and integration that are necessary for LSU HASP
CHAPTER 7 HARDWARE IMPLEMENTATION
 168 CHAPTER 7 HARDWARE IMPLEMENTATION 7.1 OVERVIEW In the previous chapters discussed about the design and simulation of Discrete controller for ZVS Buck, Interleaved Boost, Buck-Boost, Double Frequency
168 CHAPTER 7 HARDWARE IMPLEMENTATION 7.1 OVERVIEW In the previous chapters discussed about the design and simulation of Discrete controller for ZVS Buck, Interleaved Boost, Buck-Boost, Double Frequency
Sensors and Actuators Introduction to sensors
 Sensors and Actuators Introduction to sensors Sander Stuijk (s.stuijk@tue.nl) Department of Electrical Engineering Electronic Systems INDUCTIVE SENSORS (Chapter 3.4, 7.3) 3 Inductive sensors 4 Inductive
Sensors and Actuators Introduction to sensors Sander Stuijk (s.stuijk@tue.nl) Department of Electrical Engineering Electronic Systems INDUCTIVE SENSORS (Chapter 3.4, 7.3) 3 Inductive sensors 4 Inductive
Brushed DC Motor Microcontroller PWM Speed Control with Optical Encoder and H-Bridge
 Brushed DC Motor Microcontroller PWM Speed Control with Optical Encoder and H-Bridge L298 Full H-Bridge HEF4071B OR Gate Brushed DC Motor with Optical Encoder & Load Inertia Flyback Diodes Arduino Microcontroller
Brushed DC Motor Microcontroller PWM Speed Control with Optical Encoder and H-Bridge L298 Full H-Bridge HEF4071B OR Gate Brushed DC Motor with Optical Encoder & Load Inertia Flyback Diodes Arduino Microcontroller
AN ARDUINO CONTROLLED CHAOTIC PENDULUM FOR A REMOTE PHYSICS LABORATORY
 AN ARDUINO CONTROLLED CHAOTIC PENDULUM FOR A REMOTE PHYSICS LABORATORY J. C. Álvarez, J. Lamas, A. J. López, A. Ramil Universidade da Coruña (SPAIN) carlos.alvarez@udc.es, jlamas@udc.es, ana.xesus.lopez@udc.es,
AN ARDUINO CONTROLLED CHAOTIC PENDULUM FOR A REMOTE PHYSICS LABORATORY J. C. Álvarez, J. Lamas, A. J. López, A. Ramil Universidade da Coruña (SPAIN) carlos.alvarez@udc.es, jlamas@udc.es, ana.xesus.lopez@udc.es,
AC : DEVELOPING A COURSE AND LABORATORY FOR EM- BEDDED CONTROL OF MECHATRONIC SYSTEMS
 AC 2011-342: DEVELOPING A COURSE AND LABORATORY FOR EM- BEDDED CONTROL OF MECHATRONIC SYSTEMS M. Moallem, Simon Fraser University Prof. M. Moallem is with the School of Engineering Science, Simon Fraser
AC 2011-342: DEVELOPING A COURSE AND LABORATORY FOR EM- BEDDED CONTROL OF MECHATRONIC SYSTEMS M. Moallem, Simon Fraser University Prof. M. Moallem is with the School of Engineering Science, Simon Fraser
Design of A Closed Loop Speed Control For BLDC Motor
 International Refereed Journal of Engineering and Science (IRJES) ISSN (Online) 2319-183X, (Print) 2319-1821 Volume 3, Issue 11 (November 214), PP.17-111 Design of A Closed Loop Speed Control For BLDC
International Refereed Journal of Engineering and Science (IRJES) ISSN (Online) 2319-183X, (Print) 2319-1821 Volume 3, Issue 11 (November 214), PP.17-111 Design of A Closed Loop Speed Control For BLDC
PID, I-PD and PD-PI Controller Design for the Ball and Beam System: A Comparative Study
 IJCTA, 9(39), 016, pp. 9-14 International Science Press Closed Loop Control of Soft Switched Forward Converter Using Intelligent Controller 9 PID, I-PD and PD-PI Controller Design for the Ball and Beam
IJCTA, 9(39), 016, pp. 9-14 International Science Press Closed Loop Control of Soft Switched Forward Converter Using Intelligent Controller 9 PID, I-PD and PD-PI Controller Design for the Ball and Beam
TxBlock-USB Transmitter
 Transmitter TEMPERATURE TRANSMITTER - OPERATING MANUAL V1.0x I INTRODUCTION The TxBlock-USB is a 4-20 ma 2-wire temperature transmitter for head mount, powered by the current loop. The output current is
Transmitter TEMPERATURE TRANSMITTER - OPERATING MANUAL V1.0x I INTRODUCTION The TxBlock-USB is a 4-20 ma 2-wire temperature transmitter for head mount, powered by the current loop. The output current is
Feeder Protection From Over Load and Earth Fault Relay
 Feeder Protection From Over Load and Earth Fault Relay Prof. Vaneela Pyla 1, Uma N. Bhimnath 2, Archana M. Bhosale 3, Apurva V. Khachane 4 Assistant Professor, Electrical Engineering Department, NBN Sinhgad
Feeder Protection From Over Load and Earth Fault Relay Prof. Vaneela Pyla 1, Uma N. Bhimnath 2, Archana M. Bhosale 3, Apurva V. Khachane 4 Assistant Professor, Electrical Engineering Department, NBN Sinhgad
Effective Teaching Learning Process for PID Controller Based on Experimental Setup with LabVIEW
 Effective Teaching Learning Process for PID Controller Based on Experimental Setup with LabVIEW Komal Sampatrao Patil & D.R.Patil Electrical Department, Walchand college of Engineering, Sangli E-mail :
Effective Teaching Learning Process for PID Controller Based on Experimental Setup with LabVIEW Komal Sampatrao Patil & D.R.Patil Electrical Department, Walchand college of Engineering, Sangli E-mail :
BS-Electrical Engineering (Spring 1985) University of Oklahoma, Norman, OK
 University of Oklahoma, Norman, OK") 101 Oklahoma Drive Portales, NM 88130 Office: (575) 562-2073 Home: (575) 356-4467 Cell: 575-825-0199 E-mail: hamid.allamehzadeh@enmu.edu EDUCATION: PH.D. - ELECTRICAL ENGINEERING (Spring 1996) Dissertation:
101 Oklahoma Drive Portales, NM 88130 Office: (575) 562-2073 Home: (575) 356-4467 Cell: 575-825-0199 E-mail: hamid.allamehzadeh@enmu.edu EDUCATION: PH.D. - ELECTRICAL ENGINEERING (Spring 1996) Dissertation:
Light Intensity and Power Meter Based On LDR and Microcontroller
 Light Intensity and Power Meter Based On LDR and Microcontroller Sheikh Mohammad Nafees, Purnomo Sidi Priambodo Dept. of Electrical Engineering, Faculty of Engineering, Universitas Indonesia Depok Campus,
Light Intensity and Power Meter Based On LDR and Microcontroller Sheikh Mohammad Nafees, Purnomo Sidi Priambodo Dept. of Electrical Engineering, Faculty of Engineering, Universitas Indonesia Depok Campus,
Development of a MATLAB Data Acquisition and Control Toolbox for BASIC Stamp Microcontrollers
 Chapter 4 Development of a MATLAB Data Acquisition and Control Toolbox for BASIC Stamp Microcontrollers 4.1. Introduction Data acquisition and control boards, also known as DAC boards, are used in virtually
Chapter 4 Development of a MATLAB Data Acquisition and Control Toolbox for BASIC Stamp Microcontrollers 4.1. Introduction Data acquisition and control boards, also known as DAC boards, are used in virtually
5500 CNC Lathe Systems (Heavy Duty)
") 5500 CNC Lathe Systems (Heavy Duty) LabVolt Series Datasheet Festo Didactic en 220 V - 50 Hz 04/2018 Table of Contents General Description 2 Features & Benefits 3 List of Available Training Systems 3 Additional
5500 CNC Lathe Systems (Heavy Duty) LabVolt Series Datasheet Festo Didactic en 220 V - 50 Hz 04/2018 Table of Contents General Description 2 Features & Benefits 3 List of Available Training Systems 3 Additional
Magnetic Suspension System Control Using Position and Current Feedback. Senior Project Proposal. Team: Gary Boline and Andrew Michalets
 Magnetic Suspension System Control Using Position and Current Feedback Senior Project Proposal Team: Gary Boline and Andrew Michalets Advisors: Dr. Anakwa and Dr. Schertz Date: November 28, 2006 Summary
Magnetic Suspension System Control Using Position and Current Feedback Senior Project Proposal Team: Gary Boline and Andrew Michalets Advisors: Dr. Anakwa and Dr. Schertz Date: November 28, 2006 Summary
A SMART METHOD FOR AUTOMATIC TEMPERATURE CONTROL
 ABSTRACT A SMART METHOD FOR AUTOMATIC TEMPERATURE CONTROL Pratima Datta 1, Pritha Saha 2, Bapita Roy 3 1,2 Department of Applied Electronics and Instrumentation, Guru Nanak Institute of Technology, (India)
ABSTRACT A SMART METHOD FOR AUTOMATIC TEMPERATURE CONTROL Pratima Datta 1, Pritha Saha 2, Bapita Roy 3 1,2 Department of Applied Electronics and Instrumentation, Guru Nanak Institute of Technology, (India)
HexGen HEX HL Hexapod Six-DOF Positioning System
 HexGen HE300-230HL Hexapods and Robotics HexGen HE300-230HL Hexapod Six-DOF Positioning System Six degree-of-freedom positioning with linear travels to 60 mm and angular travels to 30 Precision design
HexGen HE300-230HL Hexapods and Robotics HexGen HE300-230HL Hexapod Six-DOF Positioning System Six degree-of-freedom positioning with linear travels to 60 mm and angular travels to 30 Precision design
National Instruments Our Mission
 NI ELVIS National Instruments Our Mission We equip engineers and scientists with tools that accelerate productivity, innovation, and discovery. 2 The NI Teaching Philosophy To inspire and prepare tomorrow
NI ELVIS National Instruments Our Mission We equip engineers and scientists with tools that accelerate productivity, innovation, and discovery. 2 The NI Teaching Philosophy To inspire and prepare tomorrow
KILOMAX PRO 15A Professional Series
 Specification Nominal Basket Diameter Nominal Impedance* Power Rating** Watts Music Program Resonance Usable Frequency Range*** Sensitivity Magnet Weight Gap Height Voice Coil Diameter Thiele & Small Parameters
Specification Nominal Basket Diameter Nominal Impedance* Power Rating** Watts Music Program Resonance Usable Frequency Range*** Sensitivity Magnet Weight Gap Height Voice Coil Diameter Thiele & Small Parameters
RA / /6. Replaces: Table of contents RA /06.98
 Electronic amplifier for the control of proportional directional ales with electrical position feedback Models VT 5024 and VT 5025, Series 1X RA 29 958/06.98 Replaces: 11.97 The amplifiers VT 5024 and
Electronic amplifier for the control of proportional directional ales with electrical position feedback Models VT 5024 and VT 5025, Series 1X RA 29 958/06.98 Replaces: 11.97 The amplifiers VT 5024 and
Mechatronics. Analog and Digital Electronics: Studio Exercises 1 & 2
 Mechatronics Analog and Digital Electronics: Studio Exercises 1 & 2 There is an electronics revolution taking place in the industrialized world. Electronics pervades all activities. Perhaps the most important
Mechatronics Analog and Digital Electronics: Studio Exercises 1 & 2 There is an electronics revolution taking place in the industrialized world. Electronics pervades all activities. Perhaps the most important
Correlation of Voltage and Temperature Measurement
 MEASURpoint Correlation of Voltage and Temperature Measurement Precision Measurement Instrument MEASURpoint is an ultra-accurate instrument for any combination of temperature and voltage to be measured
MEASURpoint Correlation of Voltage and Temperature Measurement Precision Measurement Instrument MEASURpoint is an ultra-accurate instrument for any combination of temperature and voltage to be measured
New Long Stroke Vibration Shaker Design using Linear Motor Technology
 New Long Stroke Vibration Shaker Design using Linear Motor Technology The Modal Shop, Inc. A PCB Group Company Patrick Timmons Calibration Systems Engineer Mark Schiefer Senior Scientist Long Stroke Shaker
New Long Stroke Vibration Shaker Design using Linear Motor Technology The Modal Shop, Inc. A PCB Group Company Patrick Timmons Calibration Systems Engineer Mark Schiefer Senior Scientist Long Stroke Shaker
WIND MONITOR ANEMO / WIND VANE YOUNG ALPINE
 WIND MONITOR ANEMO / WIND VANE YOUNG ALPINE 05103-45 ORDER - Nº SENSOR MEASURE ELECTRICAL OUPUT YOUNG ALPINE 05103-45 WIND SPEED R: 2 kω ELECTRICAL SUPPLY WIND DIRECTION Pot: 10 kω 15 VDC HEATING SUPPLY
WIND MONITOR ANEMO / WIND VANE YOUNG ALPINE 05103-45 ORDER - Nº SENSOR MEASURE ELECTRICAL OUPUT YOUNG ALPINE 05103-45 WIND SPEED R: 2 kω ELECTRICAL SUPPLY WIND DIRECTION Pot: 10 kω 15 VDC HEATING SUPPLY
LaserBot. SKU: Weight: 4.48 Kilogram
 LaserBot SKU: 90105 Weight: 4.48 Kilogram LaserBot LaserBot is a desktop laser engraver developed on Makeblock's open-source platform. Equipped with 1.6W 445nm high power solid-state lasers, and cooperating
LaserBot SKU: 90105 Weight: 4.48 Kilogram LaserBot LaserBot is a desktop laser engraver developed on Makeblock's open-source platform. Equipped with 1.6W 445nm high power solid-state lasers, and cooperating
WIND VANE THIES COMPACT TMR
 WIND VANE THIES COMPACT TMR ORDER - N O ELECTRICAL OUTPUT ELECTRICAL SUPPLY HEATING SUPPLY MODEL IN EOL MANAGER 4.3129.60.773 0 5V 4.3129.70.773 0 5V 4.3129.60.173 0 5 V 8 30 VDC/ 24 VAC
WIND VANE THIES COMPACT TMR ORDER - N O ELECTRICAL OUTPUT ELECTRICAL SUPPLY HEATING SUPPLY MODEL IN EOL MANAGER 4.3129.60.773 0 5V 4.3129.70.773 0 5V 4.3129.60.173 0 5 V 8 30 VDC/ 24 VAC
Analog Vs. Digital Weighing Systems
 Analog Vs. Digital Weighing Systems When sizing up a weighing application there are many options to choose from. With modern technology and the advancements in A/D converter technology the performance
Analog Vs. Digital Weighing Systems When sizing up a weighing application there are many options to choose from. With modern technology and the advancements in A/D converter technology the performance
BETA-8A American Standard Series
 Specification Nominal Basket Diameter Nominal Impedance* Power Rating** Watts Music Program Resonance Usable Frequency Range*** Sensitivity Magnet Weight Gap Height Voice Coil Diameter Thiele & Small Parameters
Specification Nominal Basket Diameter Nominal Impedance* Power Rating** Watts Music Program Resonance Usable Frequency Range*** Sensitivity Magnet Weight Gap Height Voice Coil Diameter Thiele & Small Parameters
Design and Simulation of a Hybrid Controller for a Multi-Input Multi-Output Magnetic Suspension System
 Design and Simulation of a Hybrid Controller for a Multi-Input Multi-Output Magnetic Suspension System Sherif M. Abuelenin, Member, IEEE Abstract In this paper we present a Fuzzy Logic control approach
Design and Simulation of a Hybrid Controller for a Multi-Input Multi-Output Magnetic Suspension System Sherif M. Abuelenin, Member, IEEE Abstract In this paper we present a Fuzzy Logic control approach
SERVO MOTOR CONTROL TRAINER
 SERVO MOTOR CONTROL TRAINER UC-1780A FEATURES Open & closed loop speed and position control. Analog and digital control techniques. PC based instrumentation include oscilloscope, multimeter and etc. PC
SERVO MOTOR CONTROL TRAINER UC-1780A FEATURES Open & closed loop speed and position control. Analog and digital control techniques. PC based instrumentation include oscilloscope, multimeter and etc. PC
Modeling and Control of Liquid Level Non-linear Interacting and Non-interacting System
 ISSN (Print) : 30 3765 ISSN (Online): 78 8875 (An ISO 397: 007 Certified Organization) Vol. 3, Issue 3, March 04 Modeling and Control of Liquid Level Non-linear Inter and Non-inter System S.Saju B.E.M.E.(Ph.D.),
ISSN (Print) : 30 3765 ISSN (Online): 78 8875 (An ISO 397: 007 Certified Organization) Vol. 3, Issue 3, March 04 Modeling and Control of Liquid Level Non-linear Inter and Non-inter System S.Saju B.E.M.E.(Ph.D.),
Jaguar Motor Controller (Stellaris Brushed DC Motor Control Module with CAN)
") Jaguar Motor Controller (Stellaris Brushed DC Motor Control Module with CAN) 217-3367 Ordering Information Product Number Description 217-3367 Stellaris Brushed DC Motor Control Module with CAN (217-3367)
Jaguar Motor Controller (Stellaris Brushed DC Motor Control Module with CAN) 217-3367 Ordering Information Product Number Description 217-3367 Stellaris Brushed DC Motor Control Module with CAN (217-3367)
DC Motor Speed Control using PID Controllers
 "EE 616 Electronic System Design Course Project, EE Dept, IIT Bombay, November 2009" DC Motor Speed Control using PID Controllers Nikunj A. Bhagat (08307908) nbhagat@ee.iitb.ac.in, Mahesh Bhaganagare (CEP)
"EE 616 Electronic System Design Course Project, EE Dept, IIT Bombay, November 2009" DC Motor Speed Control using PID Controllers Nikunj A. Bhagat (08307908) nbhagat@ee.iitb.ac.in, Mahesh Bhaganagare (CEP)
Study on monitoring technology of aircraft engine based on vibration and oil
 Study on monitoring technology of aircraft engine based on vibration and oil More info about this article: http://www.ndt.net/?id=21987 Junming LIN 1, Libo CHEN 2 1 Eddysun(Xiamen)Electronic Co., Ltd,
Study on monitoring technology of aircraft engine based on vibration and oil More info about this article: http://www.ndt.net/?id=21987 Junming LIN 1, Libo CHEN 2 1 Eddysun(Xiamen)Electronic Co., Ltd,
A PID Controller for Real-Time DC Motor Speed Control using the C505C Microcontroller
 A PID Controller for Real-Time DC Motor Speed Control using the C505C Microcontroller Sukumar Kamalasadan Division of Engineering and Computer Technology University of West Florida, Pensacola, FL, 32513
A PID Controller for Real-Time DC Motor Speed Control using the C505C Microcontroller Sukumar Kamalasadan Division of Engineering and Computer Technology University of West Florida, Pensacola, FL, 32513
DC motor control using arduino
 DC motor control using arduino 1) Introduction: First we need to differentiate between DC motor and DC generator and where we can use it in this experiment. What is the main different between the DC-motor,
DC motor control using arduino 1) Introduction: First we need to differentiate between DC motor and DC generator and where we can use it in this experiment. What is the main different between the DC-motor,
DELTALITE -II 2515 Neodymium
 Specification Nominal Basket Diameter Nominal Impedance* Power Rating** Watts Music Program Resonance Usable Frequency Range*** Sensitivity Magnet Weight Gap Height Voice Coil Diameter Thiele & Small Parameters
Specification Nominal Basket Diameter Nominal Impedance* Power Rating** Watts Music Program Resonance Usable Frequency Range*** Sensitivity Magnet Weight Gap Height Voice Coil Diameter Thiele & Small Parameters
Chapter 5. Tracking system with MEMS mirror
 Chapter 5 Tracking system with MEMS mirror Up to now, this project has dealt with the theoretical optimization of the tracking servo with MEMS mirror through the use of simulation models. For these models
Chapter 5 Tracking system with MEMS mirror Up to now, this project has dealt with the theoretical optimization of the tracking servo with MEMS mirror through the use of simulation models. For these models
BETA-8A American Standard Series
 Specification Nominal Basket Diameter Nominal Impedance* Power Rating** Watts Music Program Resonance Usable Frequency Range*** Sensitivity Magnet Weight Gap Height Voice Coil Diameter Thiele & Small Parameters
Specification Nominal Basket Diameter Nominal Impedance* Power Rating** Watts Music Program Resonance Usable Frequency Range*** Sensitivity Magnet Weight Gap Height Voice Coil Diameter Thiele & Small Parameters
Roline L1 Series. Humidity - Temperature Transmitters INSTRUCTION MANUAL
 Roline L1 Series Humidity - Temperature Transmitters INSTRUCTION MANUAL 20030314 CONTENTS Overview... 3 Operation... 5 Power supply... 5 Operating range and limits... 5 Temperature compensation of the
Roline L1 Series Humidity - Temperature Transmitters INSTRUCTION MANUAL 20030314 CONTENTS Overview... 3 Operation... 5 Power supply... 5 Operating range and limits... 5 Temperature compensation of the
Small and easy to mount IP67 rated. distance to target 1 Weather station monitoring
 4-20HR-MaxSonar -WR/WRC Series High Resolution, Precision, IP67 Weather Resistant, Ultrasonic Range Finders MB7460, MB7469, MB7480, MB7489 5 The 4-20HR-MaxSonar-WR sensor line is a high performance ultrasonic
4-20HR-MaxSonar -WR/WRC Series High Resolution, Precision, IP67 Weather Resistant, Ultrasonic Range Finders MB7460, MB7469, MB7480, MB7489 5 The 4-20HR-MaxSonar-WR sensor line is a high performance ultrasonic
Volume and Surface Area (H) Intervention Booklet
 Intervention Booklet") Volume and Surface Area (H) Intervention Booklet Prisms (Including Cylinders) Things to remember: Volume of a prism = area of cross section x vertical height Area of triangle = b x h Area of circle = π
Volume and Surface Area (H) Intervention Booklet Prisms (Including Cylinders) Things to remember: Volume of a prism = area of cross section x vertical height Area of triangle = b x h Area of circle = π
Fatima Michael college of Engineering and Technology
 Fatima Michael college of Engineering and Technology DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING EE2303 TRANSMISSION AND DISTRIBUTION SEM: V Question bank UNIT I INTRODUCTION 1. What is the electric
Fatima Michael college of Engineering and Technology DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING EE2303 TRANSMISSION AND DISTRIBUTION SEM: V Question bank UNIT I INTRODUCTION 1. What is the electric
SA1521 SPEAKER SA1521 SA1521. Features. Applications Live Applications Playback Applications Portable PA Systems Corporate Events
 The is an active 2-way sound reinforcement speaker system designed for extreme accuracy, high output, and smooth dispersion across the entire audio frequency range. It integrates 5 watts of amplifier power,
The is an active 2-way sound reinforcement speaker system designed for extreme accuracy, high output, and smooth dispersion across the entire audio frequency range. It integrates 5 watts of amplifier power,
Coil in the AC circuit
 Coil in the AC circuit LEP Related topics Inductance, Kirchhoff s laws, parallel connection, series connection, a. c. impedance, phase displacement, vector diagram Principle The impedance and phase displacement
Coil in the AC circuit LEP Related topics Inductance, Kirchhoff s laws, parallel connection, series connection, a. c. impedance, phase displacement, vector diagram Principle The impedance and phase displacement
HexGen HEX HL Hexapod Six-DOF Positioning System
 HexGen HE300-230HL Hexapods and Robotics HexGen HE300-230HL Hexapod Six-DOF Positioning System Six degree-of-freedom positioning with linear travels to 60 mm and angular travels to 30 Precision design
HexGen HE300-230HL Hexapods and Robotics HexGen HE300-230HL Hexapod Six-DOF Positioning System Six degree-of-freedom positioning with linear travels to 60 mm and angular travels to 30 Precision design