Cantag: an open source software toolkit for designing and deploying marker-based vision systems. Andrew Rice. Computer Laboratory
|
|
|
- Lucinda Mitchell
- 5 years ago
- Views:
Transcription
1 Cantag: an open source software toolkit for designing and deploying marker-based vision systems Andrew Rice University of Cambridge
2 Marker Based Vision Systems MBV systems track specific marker tags in an image Scene is more constrained than for a general vision system more efficient execution more reliable tracking accurate 3D position and pose Used for barcodes, augmented reality visual overlay and spatial reasoning



3 Many Vision Systems CircleInner CircleOuter State ARToolKit CircleSplit Cho Owen Zhong Square Intersense TRIP Matrix Rohs QRCode
4 Tag Shape Square Tags find a correspondance between four corner points in object co-ordinates and image co-ordinates ARToolKit Owen Zhong Square Matrix Rohs QRCode
5 Tag Shape CircleInner CircleOuter CircleSplit Cho Intersense TRIP State Circular tags exploit the projective invariant that a circle transforms to an ellipse in the camera image
6 Tag Data Coding CircleInner CircleOuter Symbolic coding schemes store a binary payload in tag data cells CircleSplit Intersense TRIP Matrix Zhong Square Rohs QRCode
7 Cantag Cantag combines multiple tag types and tag tracking algorithms in a single framework CircleInner CircleOuter Users can change one processing step without affecting any of the others CircleSplit Square A platform for investigating the fundamentals of tag tracking systems


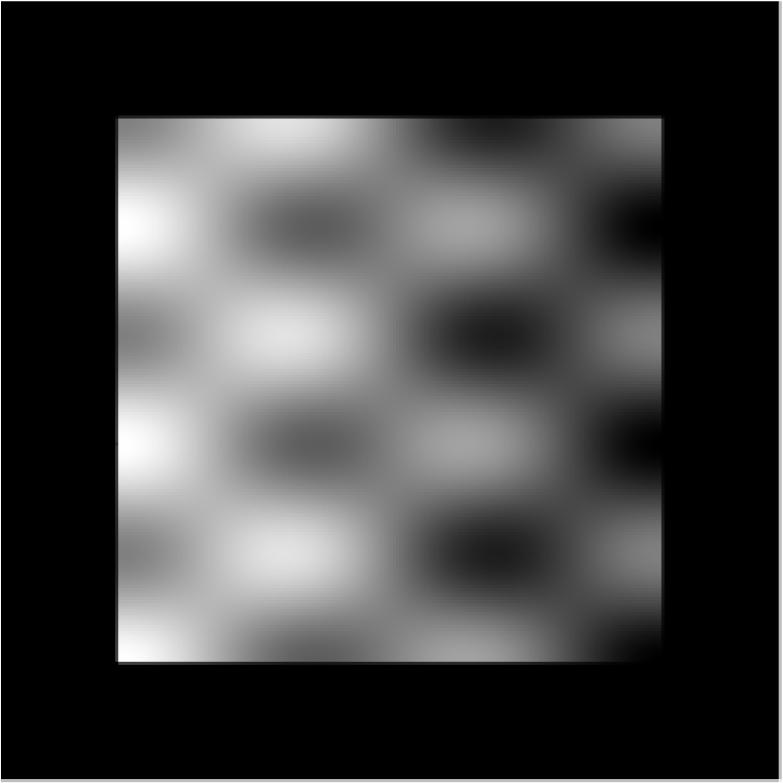
8 Limits of Tag Decoding Consider systems operating on 1-bit black & white images only this is common due to performance reasons Sample Distance = shortest distance from data cell centre to edge If sample distance < 1 pixel we might sample the value from an adjacent cell



9 Sample Distance sample distance is radial sample distance is tangential

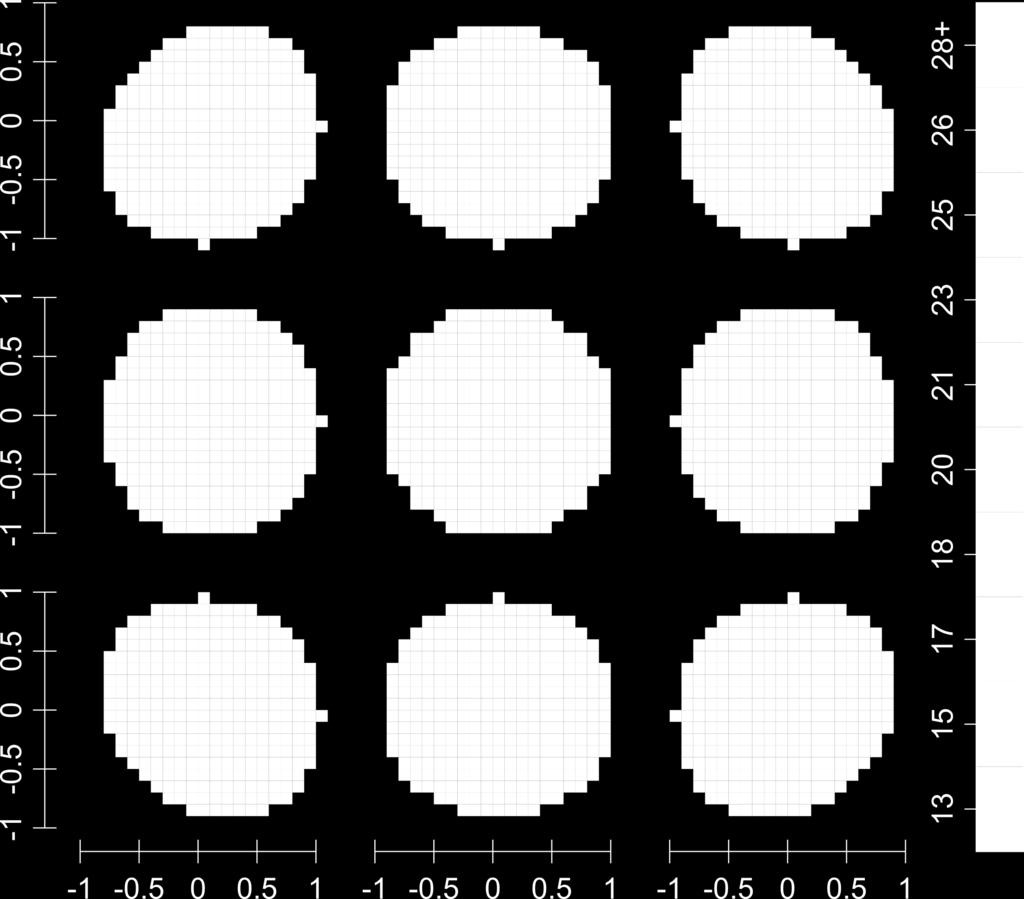
10 Minimum Sample Distance

11 Minimum Sample Distance
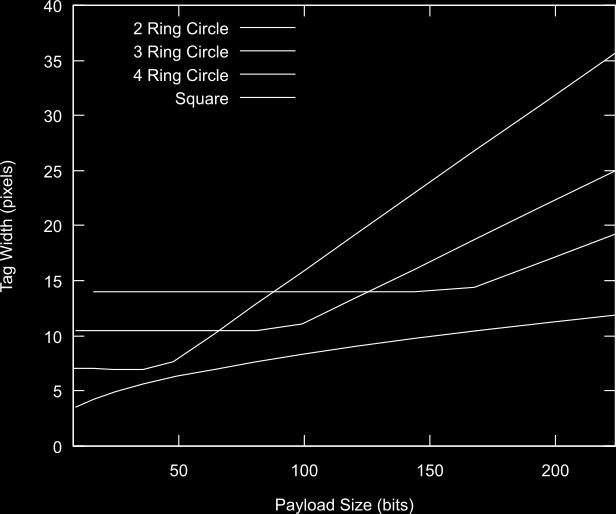
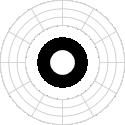
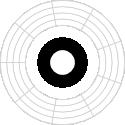
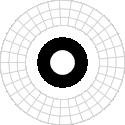

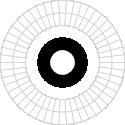
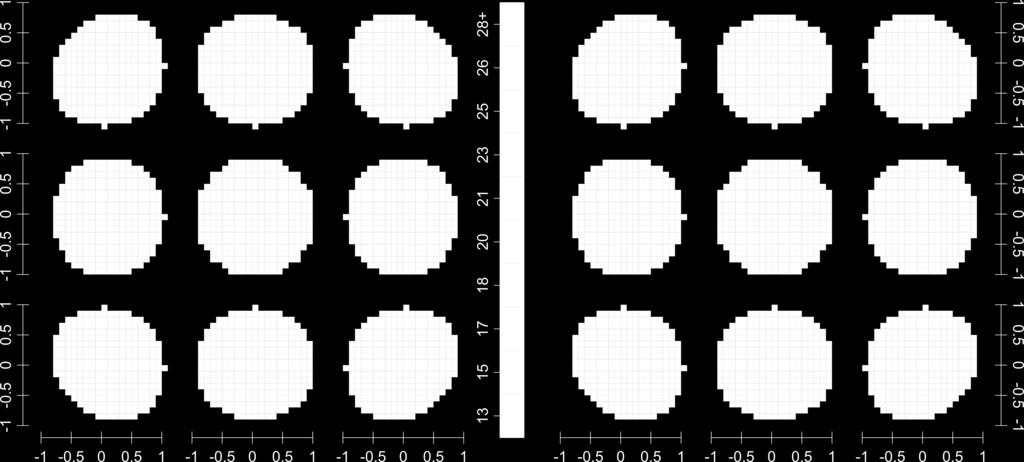
12 Optimising Tag Layout 36 bits 100 bits 2 rings 3 rings 4 rings


13 Sample Strength The estimate of the sample point will have some error in it sample distance = proximity of sample point to edge of cell sample error = error in estimate of sample point sample strength = error - distance



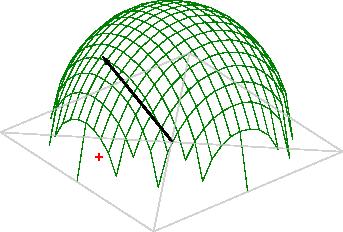
14 Shape Fitting Circle: Least Squares Fit Contours Circle: Simple Fit


15 Shape Fitting better recognition bigger tag Circle: Least Squares Fit Circle: Simple Fit
16 Real-World Results bigger tag better recognition Can't measure sample strength in the real-world Location error should show the same trends High sample strength should imply low location error Circle: Least Squares Fit

17 Real-World Results bigger tag better recognition Circle: Least Squares Fit Circle: Simple Fit

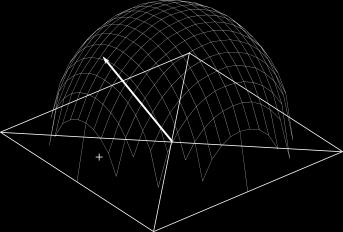
18 Square vs Circle Circle: Least Squares Fit Square: Convex Hull + Regr
19 Conclusions Sample distance is a theoretical model of the tag performance Independent of image processing algoithms used Allows high-level investigation in to tag properties Sample Strength improves the analysis Simulated results from OpenGL have only pixel truncation error This is sufficient to predict real-world behaviour! Results Square tags carry a larger payload Circular tags provide more robust location information Use as many points from the contour as possible for shape fitting


20 Recent Work Measure the sample distance for each datacell Systematic errors due to the geometry of the tag Error correcting codes will not extend the read range of square tags
21 Finally... Cantag is open-source code, available online:
Interior Design using Augmented Reality Environment
 Interior Design using Augmented Reality Environment Kalyani Pampattiwar 2, Akshay Adiyodi 1, Manasvini Agrahara 1, Pankaj Gamnani 1 Assistant Professor, Department of Computer Engineering, SIES Graduate
Interior Design using Augmented Reality Environment Kalyani Pampattiwar 2, Akshay Adiyodi 1, Manasvini Agrahara 1, Pankaj Gamnani 1 Assistant Professor, Department of Computer Engineering, SIES Graduate
Transportation Informatics Group, ALPEN-ADRIA University of Klagenfurt. Transportation Informatics Group University of Klagenfurt 3/10/2009 1
 Machine Vision Transportation Informatics Group University of Klagenfurt Alireza Fasih, 2009 3/10/2009 1 Address: L4.2.02, Lakeside Park, Haus B04, Ebene 2, Klagenfurt-Austria Index Driver Fatigue Detection
Machine Vision Transportation Informatics Group University of Klagenfurt Alireza Fasih, 2009 3/10/2009 1 Address: L4.2.02, Lakeside Park, Haus B04, Ebene 2, Klagenfurt-Austria Index Driver Fatigue Detection
AR 2 kanoid: Augmented Reality ARkanoid
 AR 2 kanoid: Augmented Reality ARkanoid B. Smith and R. Gosine C-CORE and Memorial University of Newfoundland Abstract AR 2 kanoid, Augmented Reality ARkanoid, is an augmented reality version of the popular
AR 2 kanoid: Augmented Reality ARkanoid B. Smith and R. Gosine C-CORE and Memorial University of Newfoundland Abstract AR 2 kanoid, Augmented Reality ARkanoid, is an augmented reality version of the popular
Overview. Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image
 Camera & Color Overview Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image Book: Hartley 6.1, Szeliski 2.1.5, 2.2, 2.3 The trip
Camera & Color Overview Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image Book: Hartley 6.1, Szeliski 2.1.5, 2.2, 2.3 The trip
Job Description. Commitment: Must be available to work full-time hours, M-F for weeks beginning Summer of 2018.
 Research Intern Director of Research We are seeking a summer intern to support the team to develop prototype 3D sensing systems based on state-of-the-art sensing technologies along with computer vision
Research Intern Director of Research We are seeking a summer intern to support the team to develop prototype 3D sensing systems based on state-of-the-art sensing technologies along with computer vision
AR Glossary. Terms. AR Glossary 1
 AR Glossary Every domain has specialized terms to express domain- specific meaning and concepts. Many misunderstandings and errors can be attributed to improper use or poorly defined terminology. The Augmented
AR Glossary Every domain has specialized terms to express domain- specific meaning and concepts. Many misunderstandings and errors can be attributed to improper use or poorly defined terminology. The Augmented
Lab 5: Advanced camera handling and interaction
 Lab 5: Advanced camera handling and interaction Learning goals: 1. Understanding motion tracking and interaction using Augmented Reality Toolkit 2. Develop methods for 3D interaction. 3. Understanding
Lab 5: Advanced camera handling and interaction Learning goals: 1. Understanding motion tracking and interaction using Augmented Reality Toolkit 2. Develop methods for 3D interaction. 3. Understanding
ISCW 2001 Tutorial. An Introduction to Augmented Reality
 ISCW 2001 Tutorial An Introduction to Augmented Reality Mark Billinghurst Human Interface Technology Laboratory University of Washington, Seattle grof@hitl.washington.edu Dieter Schmalstieg Technical University
ISCW 2001 Tutorial An Introduction to Augmented Reality Mark Billinghurst Human Interface Technology Laboratory University of Washington, Seattle grof@hitl.washington.edu Dieter Schmalstieg Technical University
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS. Sergii Bykov Technical Lead Machine Learning 12 Oct 2017
 23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
Design and Development of a Marker-based Augmented Reality System using OpenCV and OpenGL
 Design and Development of a Marker-based Augmented Reality System using OpenCV and OpenGL Yap Hwa Jentl, Zahari Taha 2, Eng Tat Hong", Chew Jouh Yeong" Centre for Product Design and Manufacturing (CPDM).
Design and Development of a Marker-based Augmented Reality System using OpenCV and OpenGL Yap Hwa Jentl, Zahari Taha 2, Eng Tat Hong", Chew Jouh Yeong" Centre for Product Design and Manufacturing (CPDM).
Tag Detection for Preventing Unauthorized Face Image Processing
 Tag Detection for Preventing Unauthorized Face Image Processing Alberto Escalada Jimenez 1, Adrian Dabrowski 2, Noburu Sonehara 3, Juan M Montero Martinez 1, and Isao Echizen 3 1 E.T.S. Ing. Telecomunicacin,
Tag Detection for Preventing Unauthorized Face Image Processing Alberto Escalada Jimenez 1, Adrian Dabrowski 2, Noburu Sonehara 3, Juan M Montero Martinez 1, and Isao Echizen 3 1 E.T.S. Ing. Telecomunicacin,
Images and Graphics. 4. Images and Graphics - Copyright Denis Hamelin - Ryerson University
 Images and Graphics Images and Graphics Graphics and images are non-textual information that can be displayed and printed. Graphics (vector graphics) are an assemblage of lines, curves or circles with
Images and Graphics Images and Graphics Graphics and images are non-textual information that can be displayed and printed. Graphics (vector graphics) are an assemblage of lines, curves or circles with
HIGH ORDER MODULATION SHAPED TO WORK WITH RADIO IMPERFECTIONS
 HIGH ORDER MODULATION SHAPED TO WORK WITH RADIO IMPERFECTIONS Karl Martin Gjertsen 1 Nera Networks AS, P.O. Box 79 N-52 Bergen, Norway ABSTRACT A novel layout of constellations has been conceived, promising
HIGH ORDER MODULATION SHAPED TO WORK WITH RADIO IMPERFECTIONS Karl Martin Gjertsen 1 Nera Networks AS, P.O. Box 79 N-52 Bergen, Norway ABSTRACT A novel layout of constellations has been conceived, promising
Using Line and Ellipse Features for Rectification of Broadcast Hockey Video
 Using Line and Ellipse Features for Rectification of Broadcast Hockey Video Ankur Gupta, James J. Little, Robert J. Woodham Laboratory for Computational Intelligence (LCI) The University of British Columbia
Using Line and Ellipse Features for Rectification of Broadcast Hockey Video Ankur Gupta, James J. Little, Robert J. Woodham Laboratory for Computational Intelligence (LCI) The University of British Columbia
Avatar: a virtual reality based tool for collaborative production of theater shows
 Avatar: a virtual reality based tool for collaborative production of theater shows Christian Dompierre and Denis Laurendeau Computer Vision and System Lab., Laval University, Quebec City, QC Canada, G1K
Avatar: a virtual reality based tool for collaborative production of theater shows Christian Dompierre and Denis Laurendeau Computer Vision and System Lab., Laval University, Quebec City, QC Canada, G1K
제 1 HCI Korea, 증강현실전시기술의적용사례및분석. Woontack Woo ( 우운택 ), Ph.D. KAIST GSCT UVR Lab. Tw
, Ph.D. KAIST GSCT UVR Lab. Tw") 제 1 회전시공학워크샵 @ HCI Korea, 2013.2.1 증강현실전시기술의적용사례및분석 Woontack Woo ( 우운택 ), Ph.D. KAIST GSCT UVR Lab. Tw : @wwoo_ct FB: @wtwoo Virtual vs. Augmented Reality Virtual Reality (out there): Puts people in a
제 1 회전시공학워크샵 @ HCI Korea, 2013.2.1 증강현실전시기술의적용사례및분석 Woontack Woo ( 우운택 ), Ph.D. KAIST GSCT UVR Lab. Tw : @wwoo_ct FB: @wtwoo Virtual vs. Augmented Reality Virtual Reality (out there): Puts people in a
Development Of A Novel Finder Pattern For Effective Color 2D-Barcode Detection
 Edith Cowan University Research Online ECU Publications Pre. 2011 2008 Development Of A Novel Finder Pattern For Effective Color 2D-Barcode Detection Hiroko Kato Edith Cowan University Keng T. Tan Edith
Edith Cowan University Research Online ECU Publications Pre. 2011 2008 Development Of A Novel Finder Pattern For Effective Color 2D-Barcode Detection Hiroko Kato Edith Cowan University Keng T. Tan Edith
Fig.1 AR as mixed reality[3]
![Fig.1 AR as mixed reality[3]](/thumbs/77/76230025.jpg "Fig.1 AR as mixed reality[3]") Marker Based Augmented Reality Application in Education: Teaching and Learning Gayathri D 1, Om Kumar S 2, Sunitha Ram C 3 1,3 Research Scholar, CSE Department, SCSVMV University 2 Associate Professor,
Marker Based Augmented Reality Application in Education: Teaching and Learning Gayathri D 1, Om Kumar S 2, Sunitha Ram C 3 1,3 Research Scholar, CSE Department, SCSVMV University 2 Associate Professor,
Visual Search using Principal Component Analysis
 Visual Search using Principal Component Analysis Project Report Umesh Rajashekar EE381K - Multidimensional Digital Signal Processing FALL 2000 The University of Texas at Austin Abstract The development
Visual Search using Principal Component Analysis Project Report Umesh Rajashekar EE381K - Multidimensional Digital Signal Processing FALL 2000 The University of Texas at Austin Abstract The development
Department of Computer Science and Engineering The Chinese University of Hong Kong. Year Final Year Project
 Digital Interactive Game Interface Table Apps for ipad Supervised by: Professor Michael R. Lyu Student: Ng Ka Hung (1009615714) Chan Hing Faat (1009618344) Year 2011 2012 Final Year Project Department
Digital Interactive Game Interface Table Apps for ipad Supervised by: Professor Michael R. Lyu Student: Ng Ka Hung (1009615714) Chan Hing Faat (1009618344) Year 2011 2012 Final Year Project Department
preface Motivation Figure 1. Reality-virtuality continuum (Milgram & Kishino, 1994) Mixed.Reality Augmented. Virtuality Real...
 Mixed.Reality Augmented. Virtuality Real...") v preface Motivation Augmented reality (AR) research aims to develop technologies that allow the real-time fusion of computer-generated digital content with the real world. Unlike virtual reality (VR)
v preface Motivation Augmented reality (AR) research aims to develop technologies that allow the real-time fusion of computer-generated digital content with the real world. Unlike virtual reality (VR)
Lessons learned & Future of FeedMAP
 Lessons learned & Future of FeedMAP Final Workshop 6.10.2008 Trento, Italy Hans-Ulrich Otto Tele Atlas NV Lessons learned - FeedMAP in-vehicle client Positional accuracy of GPS receivers differs up to
Lessons learned & Future of FeedMAP Final Workshop 6.10.2008 Trento, Italy Hans-Ulrich Otto Tele Atlas NV Lessons learned - FeedMAP in-vehicle client Positional accuracy of GPS receivers differs up to
AUGMENTED REALITY APPLICATIONS USING VISUAL TRACKING
 AUGMENTED REALITY APPLICATIONS USING VISUAL TRACKING ABSTRACT Chutisant Kerdvibulvech Department of Information and Communication Technology, Rangsit University, Thailand Email: chutisant.k@rsu.ac.th In
AUGMENTED REALITY APPLICATIONS USING VISUAL TRACKING ABSTRACT Chutisant Kerdvibulvech Department of Information and Communication Technology, Rangsit University, Thailand Email: chutisant.k@rsu.ac.th In
Dynamic Distortion Correction for Endoscopy Systems with Exchangeable Optics
 Lehrstuhl für Bildverarbeitung Institute of Imaging & Computer Vision Dynamic Distortion Correction for Endoscopy Systems with Exchangeable Optics Thomas Stehle and Michael Hennes and Sebastian Gross and
Lehrstuhl für Bildverarbeitung Institute of Imaging & Computer Vision Dynamic Distortion Correction for Endoscopy Systems with Exchangeable Optics Thomas Stehle and Michael Hennes and Sebastian Gross and
Reconstructing Virtual Rooms from Panoramic Images
 Reconstructing Virtual Rooms from Panoramic Images Dirk Farin, Peter H. N. de With Contact address: Dirk Farin Eindhoven University of Technology (TU/e) Embedded Systems Institute 5600 MB, Eindhoven, The
Reconstructing Virtual Rooms from Panoramic Images Dirk Farin, Peter H. N. de With Contact address: Dirk Farin Eindhoven University of Technology (TU/e) Embedded Systems Institute 5600 MB, Eindhoven, The
Checkerboard Tracker for Camera Calibration. Andrew DeKelaita EE368
 Checkerboard Tracker for Camera Calibration Abstract Andrew DeKelaita EE368 The checkerboard extraction process is an important pre-preprocessing step in camera calibration. This project attempts to implement
Checkerboard Tracker for Camera Calibration Abstract Andrew DeKelaita EE368 The checkerboard extraction process is an important pre-preprocessing step in camera calibration. This project attempts to implement
INTERIOR DESIGN USING AUGMENTED REALITY
 INTERIOR DESIGN USING AUGMENTED REALITY Ms. Tanmayi Samant 1, Ms. Shreya Vartak 2 1,2Student, Department of Computer Engineering DJ Sanghvi College of Engineeing, Vile Parle, Mumbai-400056 Maharashtra
INTERIOR DESIGN USING AUGMENTED REALITY Ms. Tanmayi Samant 1, Ms. Shreya Vartak 2 1,2Student, Department of Computer Engineering DJ Sanghvi College of Engineeing, Vile Parle, Mumbai-400056 Maharashtra
Autonomous Self-deployment of Wireless Access Networks in an Airport Environment *
 Autonomous Self-deployment of Wireless Access Networks in an Airport Environment * Holger Claussen Bell Labs Research, Swindon, UK. * This work was part-supported by the EU Commission through the IST FP5
Autonomous Self-deployment of Wireless Access Networks in an Airport Environment * Holger Claussen Bell Labs Research, Swindon, UK. * This work was part-supported by the EU Commission through the IST FP5
Structure and Synthesis of Robot Motion
 Structure and Synthesis of Robot Motion Motion Synthesis in Groups and Formations I Subramanian Ramamoorthy School of Informatics 5 March 2012 Consider Motion Problems with Many Agents How should we model
Structure and Synthesis of Robot Motion Motion Synthesis in Groups and Formations I Subramanian Ramamoorthy School of Informatics 5 March 2012 Consider Motion Problems with Many Agents How should we model
Augmented Reality Lecture notes 01 1
 IntroductiontoAugmentedReality Lecture notes 01 1 Definition Augmented reality (AR) is a live, direct or indirect, view of a physical, real-world environment whose elements are augmented by computer-generated
IntroductiontoAugmentedReality Lecture notes 01 1 Definition Augmented reality (AR) is a live, direct or indirect, view of a physical, real-world environment whose elements are augmented by computer-generated
LOOKING AHEAD: UE4 VR Roadmap. Nick Whiting Technical Director VR / AR
 LOOKING AHEAD: UE4 VR Roadmap Nick Whiting Technical Director VR / AR HEADLINE AND IMAGE LAYOUT RECENT DEVELOPMENTS RECENT DEVELOPMENTS At Epic, we drive our engine development by creating content. We
LOOKING AHEAD: UE4 VR Roadmap Nick Whiting Technical Director VR / AR HEADLINE AND IMAGE LAYOUT RECENT DEVELOPMENTS RECENT DEVELOPMENTS At Epic, we drive our engine development by creating content. We
SoftBank Japan - rapid small cell deployment in the urban jungle
 Enabling 5G The world s only self-organising microwave backhaul SoftBank Japan - rapid small cell deployment in the urban jungle Urban small cells deployed at street level are the next logical step to
Enabling 5G The world s only self-organising microwave backhaul SoftBank Japan - rapid small cell deployment in the urban jungle Urban small cells deployed at street level are the next logical step to
Introduction to DSP ECE-S352 Fall Quarter 2000 Matlab Project 1
 Objective: Introduction to DSP ECE-S352 Fall Quarter 2000 Matlab Project 1 This Matlab Project is an extension of the basic correlation theory presented in the course. It shows a practical application
Objective: Introduction to DSP ECE-S352 Fall Quarter 2000 Matlab Project 1 This Matlab Project is an extension of the basic correlation theory presented in the course. It shows a practical application
Toward an Augmented Reality System for Violin Learning Support
 Toward an Augmented Reality System for Violin Learning Support Hiroyuki Shiino, François de Sorbier, and Hideo Saito Graduate School of Science and Technology, Keio University, Yokohama, Japan {shiino,fdesorbi,saito}@hvrl.ics.keio.ac.jp
Toward an Augmented Reality System for Violin Learning Support Hiroyuki Shiino, François de Sorbier, and Hideo Saito Graduate School of Science and Technology, Keio University, Yokohama, Japan {shiino,fdesorbi,saito}@hvrl.ics.keio.ac.jp
Project: Sudoku solver
 Project: Sudoku solver Write a program that finds the sudoku square in the image, detects the 81 fields, and identifies the number in the fields that have a number. The output should be a 9x9 matrix with
Project: Sudoku solver Write a program that finds the sudoku square in the image, detects the 81 fields, and identifies the number in the fields that have a number. The output should be a 9x9 matrix with
fast blur removal for wearable QR code scanners
 fast blur removal for wearable QR code scanners Gábor Sörös, Stephan Semmler, Luc Humair, Otmar Hilliges ISWC 2015, Osaka, Japan traditional barcode scanning next generation barcode scanning ubiquitous
fast blur removal for wearable QR code scanners Gábor Sörös, Stephan Semmler, Luc Humair, Otmar Hilliges ISWC 2015, Osaka, Japan traditional barcode scanning next generation barcode scanning ubiquitous
Computer Vision. Howie Choset Introduction to Robotics
 Computer Vision Howie Choset http://www.cs.cmu.edu.edu/~choset Introduction to Robotics http://generalrobotics.org What is vision? What is computer vision? Edge Detection Edge Detection Interest points
Computer Vision Howie Choset http://www.cs.cmu.edu.edu/~choset Introduction to Robotics http://generalrobotics.org What is vision? What is computer vision? Edge Detection Edge Detection Interest points
How to configure processing on an HPx card to get the most information from the incoming radar video
 Successful Configuration of HPx Cards How to configure processing on an HPx card to get the most information from the incoming radar video Summary It is important to configure the processing on the HPx
Successful Configuration of HPx Cards How to configure processing on an HPx card to get the most information from the incoming radar video Summary It is important to configure the processing on the HPx
VIRTUAL REALITY AND SIMULATION (2B)
") VIRTUAL REALITY AND SIMULATION (2B) AR: AN APPLICATION FOR INTERIOR DESIGN 115 TOAN PHAN VIET, CHOO SEUNG YEON, WOO SEUNG HAK, CHOI AHRINA GREEN CITY 125 P.G. SHIVSHANKAR, R. BALACHANDAR RETRIEVING LOST
VIRTUAL REALITY AND SIMULATION (2B) AR: AN APPLICATION FOR INTERIOR DESIGN 115 TOAN PHAN VIET, CHOO SEUNG YEON, WOO SEUNG HAK, CHOI AHRINA GREEN CITY 125 P.G. SHIVSHANKAR, R. BALACHANDAR RETRIEVING LOST
ISO JTC 1 SC 24 WG9 G E R A R D J. K I M K O R E A U N I V E R S I T Y
 New Work Item Proposal: A Standard Reference Model for Generic MAR Systems ISO JTC 1 SC 24 WG9 G E R A R D J. K I M K O R E A U N I V E R S I T Y What is a Reference Model? A reference model (for a given
New Work Item Proposal: A Standard Reference Model for Generic MAR Systems ISO JTC 1 SC 24 WG9 G E R A R D J. K I M K O R E A U N I V E R S I T Y What is a Reference Model? A reference model (for a given
Sensors and Sensing Cameras and Camera Calibration
 Sensors and Sensing Cameras and Camera Calibration Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 20.11.2014
Sensors and Sensing Cameras and Camera Calibration Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 20.11.2014
Augmented reality, ARToolKit, Computer vision, Image processing.
 Academic Journal of Science, CD-ROM. ISSN: 2165-6282 :: 03(02):139 146 (2014) Augmented Reality (AR) is a technology that gained popularity in recent years. It is defined as placement of virtual images
Academic Journal of Science, CD-ROM. ISSN: 2165-6282 :: 03(02):139 146 (2014) Augmented Reality (AR) is a technology that gained popularity in recent years. It is defined as placement of virtual images
Spatial Augmented Reality: Special Effects in the Real World
 Spatial Augmented Reality: Special Effects in the Real World Ramesh Raskar MIT Media Lab Cambridge, MA Poor Man s Palace Spatial Augmented Reality Raskar 2010 Poor Man s Palace Augment the world, projectors
Spatial Augmented Reality: Special Effects in the Real World Ramesh Raskar MIT Media Lab Cambridge, MA Poor Man s Palace Spatial Augmented Reality Raskar 2010 Poor Man s Palace Augment the world, projectors
AGRICULTURE, LIVESTOCK and FISHERIES
 Research in ISSN : P-2409-0603, E-2409-9325 AGRICULTURE, LIVESTOCK and FISHERIES An Open Access Peer Reviewed Journal Open Access Research Article Res. Agric. Livest. Fish. Vol. 2, No. 2, August 2015:
Research in ISSN : P-2409-0603, E-2409-9325 AGRICULTURE, LIVESTOCK and FISHERIES An Open Access Peer Reviewed Journal Open Access Research Article Res. Agric. Livest. Fish. Vol. 2, No. 2, August 2015:
Augmented Reality. Virtuelle Realität Wintersemester 2007/08. Overview. Part 14:
 Part 14: Augmented Reality Virtuelle Realität Wintersemester 2007/08 Prof. Bernhard Jung Overview Introduction to Augmented Reality Augmented Reality Displays Examples AR Toolkit an open source software
Part 14: Augmented Reality Virtuelle Realität Wintersemester 2007/08 Prof. Bernhard Jung Overview Introduction to Augmented Reality Augmented Reality Displays Examples AR Toolkit an open source software
FOCAL LENGTH CHANGE COMPENSATION FOR MONOCULAR SLAM
 FOCAL LENGTH CHANGE COMPENSATION FOR MONOCULAR SLAM Takafumi Taketomi Nara Institute of Science and Technology, Japan Janne Heikkilä University of Oulu, Finland ABSTRACT In this paper, we propose a method
FOCAL LENGTH CHANGE COMPENSATION FOR MONOCULAR SLAM Takafumi Taketomi Nara Institute of Science and Technology, Japan Janne Heikkilä University of Oulu, Finland ABSTRACT In this paper, we propose a method
Plan. Vision Solves Problems. Distal vs. proximal stimulus. Vision as an inverse problem. Unconscious inference (Helmholtz)
") The Art and Science of Depiction Vision Solves Problems Plan Vision as an cognitive process Computational theory of vision Constancy, invariants Fredo Durand MIT- Lab for Computer Science Intro to Visual
The Art and Science of Depiction Vision Solves Problems Plan Vision as an cognitive process Computational theory of vision Constancy, invariants Fredo Durand MIT- Lab for Computer Science Intro to Visual
Search Strategies of Visually Impaired Persons using a Camera Phone Wayfinding System
 Search Strategies of Visually Impaired Persons using a Camera Phone Wayfinding System R. Manduchi 1, J. Coughlan 2 and V. Ivanchenko 2 1 University of California, Santa Cruz, CA 2 Smith-Kettlewell Eye
Search Strategies of Visually Impaired Persons using a Camera Phone Wayfinding System R. Manduchi 1, J. Coughlan 2 and V. Ivanchenko 2 1 University of California, Santa Cruz, CA 2 Smith-Kettlewell Eye
Machine Vision for the Life Sciences
 Machine Vision for the Life Sciences Presented by: Niels Wartenberg June 12, 2012 Track, Trace & Control Solutions Niels Wartenberg Microscan Sr. Applications Engineer, Clinical Senior Applications Engineer
Machine Vision for the Life Sciences Presented by: Niels Wartenberg June 12, 2012 Track, Trace & Control Solutions Niels Wartenberg Microscan Sr. Applications Engineer, Clinical Senior Applications Engineer
Geometry-Based Populated Chessboard Recognition
 Geometry-Based Populated Chessboard Recognition whoff@mines.edu Colorado School of Mines Golden, Colorado, USA William Hoff bill.hoff@daqri.com DAQRI Vienna, Austria My co-authors: Youye Xie, Gongguo Tang
Geometry-Based Populated Chessboard Recognition whoff@mines.edu Colorado School of Mines Golden, Colorado, USA William Hoff bill.hoff@daqri.com DAQRI Vienna, Austria My co-authors: Youye Xie, Gongguo Tang
Application of GIS to Fast Track Planning and Monitoring of Development Agenda
 Application of GIS to Fast Track Planning and Monitoring of Development Agenda Radiometric, Atmospheric & Geometric Preprocessing of Optical Remote Sensing 13 17 June 2018 Outline 1. Why pre-process remotely
Application of GIS to Fast Track Planning and Monitoring of Development Agenda Radiometric, Atmospheric & Geometric Preprocessing of Optical Remote Sensing 13 17 June 2018 Outline 1. Why pre-process remotely
Applying mathematics to digital image processing using a spreadsheet
 Jeff Waldock Applying mathematics to digital image processing using a spreadsheet Jeff Waldock Department of Engineering and Mathematics Sheffield Hallam University j.waldock@shu.ac.uk Introduction When
Jeff Waldock Applying mathematics to digital image processing using a spreadsheet Jeff Waldock Department of Engineering and Mathematics Sheffield Hallam University j.waldock@shu.ac.uk Introduction When
MULTIPLE SENSORS LENSLETS FOR SECURE DOCUMENT SCANNERS
 INFOTEH-JAHORINA Vol. 10, Ref. E-VI-11, p. 892-896, March 2011. MULTIPLE SENSORS LENSLETS FOR SECURE DOCUMENT SCANNERS Jelena Cvetković, Aleksej Makarov, Sasa Vujić, Vlatacom d.o.o. Beograd Abstract -
INFOTEH-JAHORINA Vol. 10, Ref. E-VI-11, p. 892-896, March 2011. MULTIPLE SENSORS LENSLETS FOR SECURE DOCUMENT SCANNERS Jelena Cvetković, Aleksej Makarov, Sasa Vujić, Vlatacom d.o.o. Beograd Abstract -
Extending X3D for Augmented Reality
 Extending X3D for Augmented Reality Seventh AR Standards Group Meeting Anita Havele Executive Director, Web3D Consortium www.web3d.org anita.havele@web3d.org Nov 8, 2012 Overview X3D AR WG Update ISO SC24/SC29
Extending X3D for Augmented Reality Seventh AR Standards Group Meeting Anita Havele Executive Director, Web3D Consortium www.web3d.org anita.havele@web3d.org Nov 8, 2012 Overview X3D AR WG Update ISO SC24/SC29
Feature Extraction Technique Based On Circular Strip for Palmprint Recognition
 Feature Extraction Technique Based On Circular Strip for Palmprint Recognition Dr.S.Valarmathy 1, R.Karthiprakash 2, C.Poonkuzhali 3 1, 2, 3 ECE Department, Bannari Amman Institute of Technology, Sathyamangalam
Feature Extraction Technique Based On Circular Strip for Palmprint Recognition Dr.S.Valarmathy 1, R.Karthiprakash 2, C.Poonkuzhali 3 1, 2, 3 ECE Department, Bannari Amman Institute of Technology, Sathyamangalam
Minimally Intrusive Evaluation of Visual Comfort in the Normal Workplace
 Minimally Intrusive Evaluation of Visual Comfort in the Normal Workplace B. Painter, D. Fan, J. Mardaljevic Institute of Energy and Sustainable Development De Montfort University, Leicester, UK Project
Minimally Intrusive Evaluation of Visual Comfort in the Normal Workplace B. Painter, D. Fan, J. Mardaljevic Institute of Energy and Sustainable Development De Montfort University, Leicester, UK Project
Coursework 2. MLP Lecture 7 Convolutional Networks 1
 Coursework 2 MLP Lecture 7 Convolutional Networks 1 Coursework 2 - Overview and Objectives Overview: Use a selection of the techniques covered in the course so far to train accurate multi-layer networks
Coursework 2 MLP Lecture 7 Convolutional Networks 1 Coursework 2 - Overview and Objectives Overview: Use a selection of the techniques covered in the course so far to train accurate multi-layer networks
Session 2: 10 Year Vision session (11:00-12:20) - Tuesday. Session 3: Poster Highlights A (14:00-15:00) - Tuesday 20 posters (3minutes per poster)
 - Tuesday. Session 3: Poster Highlights A (14:00-15:00) - Tuesday 20 posters (3minutes per poster)") Lessons from Collecting a Million Biometric Samples 109 Expression Robust 3D Face Recognition by Matching Multi-component Local Shape Descriptors on the Nasal and Adjoining Cheek Regions 177 Shared Representation
Lessons from Collecting a Million Biometric Samples 109 Expression Robust 3D Face Recognition by Matching Multi-component Local Shape Descriptors on the Nasal and Adjoining Cheek Regions 177 Shared Representation
More Info at Open Access Database by S. Dutta and T. Schmidt
 More Info at Open Access Database www.ndt.net/?id=17657 New concept for higher Robot position accuracy during thermography measurement to be implemented with the existing prototype automated thermography
More Info at Open Access Database www.ndt.net/?id=17657 New concept for higher Robot position accuracy during thermography measurement to be implemented with the existing prototype automated thermography
Recent Advances in Image Deblurring. Seungyong Lee (Collaboration w/ Sunghyun Cho)
") Recent Advances in Image Deblurring Seungyong Lee (Collaboration w/ Sunghyun Cho) Disclaimer Many images and figures in this course note have been copied from the papers and presentation materials of previous
Recent Advances in Image Deblurring Seungyong Lee (Collaboration w/ Sunghyun Cho) Disclaimer Many images and figures in this course note have been copied from the papers and presentation materials of previous
Virtual Furniture Using Augmented Reality
 IOSR Journal of Computer Engineering (IOSR-JCE) e-issn: 2278-0661,p-ISSN: 2278-8727 PP 42-46 www.iosrjournals.org Virtual Furniture Using Augmented Reality Snehal Mangale 1, Nabil Phansopkar 2, Safwaan
IOSR Journal of Computer Engineering (IOSR-JCE) e-issn: 2278-0661,p-ISSN: 2278-8727 PP 42-46 www.iosrjournals.org Virtual Furniture Using Augmented Reality Snehal Mangale 1, Nabil Phansopkar 2, Safwaan
A Geometric Correction Method of Plane Image Based on OpenCV
 Sensors & Transducers 204 by IFSA Publishing, S. L. http://www.sensorsportal.com A Geometric orrection Method of Plane Image ased on OpenV Li Xiaopeng, Sun Leilei, 2 Lou aiying, Liu Yonghong ollege of
Sensors & Transducers 204 by IFSA Publishing, S. L. http://www.sensorsportal.com A Geometric orrection Method of Plane Image ased on OpenV Li Xiaopeng, Sun Leilei, 2 Lou aiying, Liu Yonghong ollege of
REVERSIBLE MEDICAL IMAGE WATERMARKING TECHNIQUE USING HISTOGRAM SHIFTING
 REVERSIBLE MEDICAL IMAGE WATERMARKING TECHNIQUE USING HISTOGRAM SHIFTING S.Mounika 1, M.L. Mittal 2 1 Department of ECE, MRCET, Hyderabad, India 2 Professor Department of ECE, MRCET, Hyderabad, India ABSTRACT
REVERSIBLE MEDICAL IMAGE WATERMARKING TECHNIQUE USING HISTOGRAM SHIFTING S.Mounika 1, M.L. Mittal 2 1 Department of ECE, MRCET, Hyderabad, India 2 Professor Department of ECE, MRCET, Hyderabad, India ABSTRACT
Total Variation Blind Deconvolution: The Devil is in the Details*
 Total Variation Blind Deconvolution: The Devil is in the Details* Paolo Favaro Computer Vision Group University of Bern *Joint work with Daniele Perrone Blur in pictures When we take a picture we expose
Total Variation Blind Deconvolution: The Devil is in the Details* Paolo Favaro Computer Vision Group University of Bern *Joint work with Daniele Perrone Blur in pictures When we take a picture we expose
DESIGN STYLE FOR BUILDING INTERIOR 3D OBJECTS USING MARKER BASED AUGMENTED REALITY
 DESIGN STYLE FOR BUILDING INTERIOR 3D OBJECTS USING MARKER BASED AUGMENTED REALITY 1 RAJU RATHOD, 2 GEORGE PHILIP.C, 3 VIJAY KUMAR B.P 1,2,3 MSRIT Bangalore Abstract- To ensure the best place, position,
DESIGN STYLE FOR BUILDING INTERIOR 3D OBJECTS USING MARKER BASED AUGMENTED REALITY 1 RAJU RATHOD, 2 GEORGE PHILIP.C, 3 VIJAY KUMAR B.P 1,2,3 MSRIT Bangalore Abstract- To ensure the best place, position,
Multi-Modal User Interaction
 Multi-Modal User Interaction Lecture 4: Multiple Modalities Zheng-Hua Tan Department of Electronic Systems Aalborg University, Denmark zt@es.aau.dk MMUI, IV, Zheng-Hua Tan 1 Outline Multimodal interface
Multi-Modal User Interaction Lecture 4: Multiple Modalities Zheng-Hua Tan Department of Electronic Systems Aalborg University, Denmark zt@es.aau.dk MMUI, IV, Zheng-Hua Tan 1 Outline Multimodal interface
Follower Robot Using Android Programming
 545 Follower Robot Using Android Programming 1 Pratiksha C Dhande, 2 Prashant Bhople, 3 Tushar Dorage, 4 Nupur Patil, 5 Sarika Daundkar 1 Assistant Professor, Department of Computer Engg., Savitribai Phule
545 Follower Robot Using Android Programming 1 Pratiksha C Dhande, 2 Prashant Bhople, 3 Tushar Dorage, 4 Nupur Patil, 5 Sarika Daundkar 1 Assistant Professor, Department of Computer Engg., Savitribai Phule
Light-Field Database Creation and Depth Estimation
 Light-Field Database Creation and Depth Estimation Abhilash Sunder Raj abhisr@stanford.edu Michael Lowney mlowney@stanford.edu Raj Shah shahraj@stanford.edu Abstract Light-field imaging research has been
Light-Field Database Creation and Depth Estimation Abhilash Sunder Raj abhisr@stanford.edu Michael Lowney mlowney@stanford.edu Raj Shah shahraj@stanford.edu Abstract Light-field imaging research has been
Implicit Fitness Functions for Evolving a Drawing Robot
 Implicit Fitness Functions for Evolving a Drawing Robot Jon Bird, Phil Husbands, Martin Perris, Bill Bigge and Paul Brown Centre for Computational Neuroscience and Robotics University of Sussex, Brighton,
Implicit Fitness Functions for Evolving a Drawing Robot Jon Bird, Phil Husbands, Martin Perris, Bill Bigge and Paul Brown Centre for Computational Neuroscience and Robotics University of Sussex, Brighton,
Basics of Error Correcting Codes
 Basics of Error Correcting Codes Drawing from the book Information Theory, Inference, and Learning Algorithms Downloadable or purchasable: http://www.inference.phy.cam.ac.uk/mackay/itila/book.html CSE
Basics of Error Correcting Codes Drawing from the book Information Theory, Inference, and Learning Algorithms Downloadable or purchasable: http://www.inference.phy.cam.ac.uk/mackay/itila/book.html CSE
Color Computer Vision Spring 2018, Lecture 15
 Color http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 15 Course announcements Homework 4 has been posted. - Due Friday March 23 rd (one-week homework!) - Any questions about the
Color http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 15 Course announcements Homework 4 has been posted. - Due Friday March 23 rd (one-week homework!) - Any questions about the
RKSLAM Android Demo 1.0
 RKSLAM Android Demo 1.0 USER MANUAL VISION GROUP, STATE KEY LAB OF CAD&CG, ZHEJIANG UNIVERSITY HTTP://WWW.ZJUCVG.NET TABLE OF CONTENTS 1 Introduction... 1-3 1.1 Product Specification...1-3 1.2 Feature
RKSLAM Android Demo 1.0 USER MANUAL VISION GROUP, STATE KEY LAB OF CAD&CG, ZHEJIANG UNIVERSITY HTTP://WWW.ZJUCVG.NET TABLE OF CONTENTS 1 Introduction... 1-3 1.1 Product Specification...1-3 1.2 Feature
Open-source AR platform for the future
 DAQRI ARToolKit 6/Open Source Open-source AR platform for the future Phil Oxford Brookes University 2017-01 ARToolKit 6: Future AR platform Tools Frameworks Tracking and localisation Tangible user interaction
DAQRI ARToolKit 6/Open Source Open-source AR platform for the future Phil Oxford Brookes University 2017-01 ARToolKit 6: Future AR platform Tools Frameworks Tracking and localisation Tangible user interaction
Augmented Keyboard: a Virtual Keyboard Interface for Smart glasses
 Augmented Keyboard: a Virtual Keyboard Interface for Smart glasses Jinki Jung Jinwoo Jeon Hyeopwoo Lee jk@paradise.kaist.ac.kr zkrkwlek@paradise.kaist.ac.kr leehyeopwoo@paradise.kaist.ac.kr Kichan Kwon
Augmented Keyboard: a Virtual Keyboard Interface for Smart glasses Jinki Jung Jinwoo Jeon Hyeopwoo Lee jk@paradise.kaist.ac.kr zkrkwlek@paradise.kaist.ac.kr leehyeopwoo@paradise.kaist.ac.kr Kichan Kwon
Computing for Engineers in Python
 Computing for Engineers in Python Lecture 10: Signal (Image) Processing Autumn 2011-12 Some slides incorporated from Benny Chor s course 1 Lecture 9: Highlights Sorting, searching and time complexity Preprocessing
Computing for Engineers in Python Lecture 10: Signal (Image) Processing Autumn 2011-12 Some slides incorporated from Benny Chor s course 1 Lecture 9: Highlights Sorting, searching and time complexity Preprocessing
The Geometry of Cognitive Maps
 The Geometry of Cognitive Maps Metric vs. Ordinal Structure Marianne Harrison William H. Warren Michael Tarr Brown University Poster presented at Vision ScienceS May 5, 2001 Introduction What geometrical
The Geometry of Cognitive Maps Metric vs. Ordinal Structure Marianne Harrison William H. Warren Michael Tarr Brown University Poster presented at Vision ScienceS May 5, 2001 Introduction What geometrical
Designing an MR compatible Time of Flight PET Detector Floris Jansen, PhD, Chief Engineer GE Healthcare
 GE Healthcare Designing an MR compatible Time of Flight PET Detector Floris Jansen, PhD, Chief Engineer GE Healthcare There is excitement across the industry regarding the clinical potential of a hybrid
GE Healthcare Designing an MR compatible Time of Flight PET Detector Floris Jansen, PhD, Chief Engineer GE Healthcare There is excitement across the industry regarding the clinical potential of a hybrid
Algorithm-Independent Color Calibration for Digital Halftoning
 Algorithm-Independent Color Calibration for Digital Halftoning Shen-ge Wang Xerox Corporation, Webster, New York Abstract A novel method based on measuring 2 2 pixel patterns provides halftone-algorithm
Algorithm-Independent Color Calibration for Digital Halftoning Shen-ge Wang Xerox Corporation, Webster, New York Abstract A novel method based on measuring 2 2 pixel patterns provides halftone-algorithm
Robust Invisible QR Code Image Watermarking Algorithm in SWT Domain
 Robust Invisible QR Code Image Watermarking Algorithm in SWT Domain Swathi.K 1, Ramudu.K 2 1 M.Tech Scholar, Annamacharya Institute of Technology & Sciences, Rajampet, Andhra Pradesh, India 2 Assistant
Robust Invisible QR Code Image Watermarking Algorithm in SWT Domain Swathi.K 1, Ramudu.K 2 1 M.Tech Scholar, Annamacharya Institute of Technology & Sciences, Rajampet, Andhra Pradesh, India 2 Assistant
Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin
 Prof. Paolo Rocco Prof. Andrea Maria Zanchettin") Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue
Available theses in robotics (March 2018) Prof. Paolo Rocco Prof. Andrea Maria Zanchettin Ergonomic positioning of bulky objects Thesis 1 Robot acts as a 3rd hand for workpiece positioning: Muscular fatigue
Head Tracking for Google Cardboard by Simond Lee
 Head Tracking for Google Cardboard by Simond Lee (slee74@student.monash.edu) Virtual Reality Through Head-mounted Displays A head-mounted display (HMD) is a device which is worn on the head with screen
Head Tracking for Google Cardboard by Simond Lee (slee74@student.monash.edu) Virtual Reality Through Head-mounted Displays A head-mounted display (HMD) is a device which is worn on the head with screen
Midterm is on Thursday!
 Midterm is on Thursday! Project presentations are May 17th, 22nd and 24th Next week there is a strike on campus. Class is therefore cancelled on Tuesday. Please work on your presentations instead! REVIEW
Midterm is on Thursday! Project presentations are May 17th, 22nd and 24th Next week there is a strike on campus. Class is therefore cancelled on Tuesday. Please work on your presentations instead! REVIEW
1. (a) Explain the process of Image acquisition. (b) Discuss different elements used in digital image processing system. [8+8]
![1. (a) Explain the process of Image acquisition. (b) Discuss different elements used in digital image processing system. [8+8]](/thumbs/77/75889541.jpg "1. (a) Explain the process of Image acquisition. (b) Discuss different elements used in digital image processing system. [8+8]") Code No: R05410408 Set No. 1 1. (a) Explain the process of Image acquisition. (b) Discuss different elements used in digital image processing system. [8+8] 2. (a) Find Fourier transform 2 -D sinusoidal
Code No: R05410408 Set No. 1 1. (a) Explain the process of Image acquisition. (b) Discuss different elements used in digital image processing system. [8+8] 2. (a) Find Fourier transform 2 -D sinusoidal
Chapter 3 Graphics and Image Data Representations
 Chapter 3 Graphics and Image Data Representations 3.1 Graphics/Image Data Types 3.2 Popular File Formats 3.3 Further Exploration 1 Li & Drew c Prentice Hall 2003 3.1 Graphics/Image Data Types The number
Chapter 3 Graphics and Image Data Representations 3.1 Graphics/Image Data Types 3.2 Popular File Formats 3.3 Further Exploration 1 Li & Drew c Prentice Hall 2003 3.1 Graphics/Image Data Types The number
Computational Vision and Picture. Plan. Computational Vision and Picture. Distal vs. proximal stimulus. Vision as an inverse problem
 Perceptual and Artistic Principles for Effective Computer Depiction Perceptual and Artistic Principles for Effective Computer Depiction Computational Vision and Picture Fredo Durand MIT- Lab for Computer
Perceptual and Artistic Principles for Effective Computer Depiction Perceptual and Artistic Principles for Effective Computer Depiction Computational Vision and Picture Fredo Durand MIT- Lab for Computer
MREAK : Morphological Retina Keypoint Descriptor
 MREAK : Morphological Retina Keypoint Descriptor Himanshu Vaghela Department of Computer Engineering D. J. Sanghvi College of Engineering Mumbai, India himanshuvaghela1998@gmail.com Manan Oza Department
MREAK : Morphological Retina Keypoint Descriptor Himanshu Vaghela Department of Computer Engineering D. J. Sanghvi College of Engineering Mumbai, India himanshuvaghela1998@gmail.com Manan Oza Department
Objective Evaluation of Edge Blur and Ringing Artefacts: Application to JPEG and JPEG 2000 Image Codecs
 Objective Evaluation of Edge Blur and Artefacts: Application to JPEG and JPEG 2 Image Codecs G. A. D. Punchihewa, D. G. Bailey, and R. M. Hodgson Institute of Information Sciences and Technology, Massey
Objective Evaluation of Edge Blur and Artefacts: Application to JPEG and JPEG 2 Image Codecs G. A. D. Punchihewa, D. G. Bailey, and R. M. Hodgson Institute of Information Sciences and Technology, Massey
HELPING THE DESIGN OF MIXED SYSTEMS
 HELPING THE DESIGN OF MIXED SYSTEMS Céline Coutrix Grenoble Informatics Laboratory (LIG) University of Grenoble 1, France Abstract Several interaction paradigms are considered in pervasive computing environments.
HELPING THE DESIGN OF MIXED SYSTEMS Céline Coutrix Grenoble Informatics Laboratory (LIG) University of Grenoble 1, France Abstract Several interaction paradigms are considered in pervasive computing environments.
FLUX: Design Education in a Changing World. DEFSA International Design Education Conference 2007
 FLUX: Design Education in a Changing World DEFSA International Design Education Conference 2007 Use of Technical Drawing Methods to Generate 3-Dimensional Form & Design Ideas Raja Gondkar Head of Design
FLUX: Design Education in a Changing World DEFSA International Design Education Conference 2007 Use of Technical Drawing Methods to Generate 3-Dimensional Form & Design Ideas Raja Gondkar Head of Design
A SURVEY ON HAND GESTURE RECOGNITION
 A SURVEY ON HAND GESTURE RECOGNITION U.K. Jaliya 1, Dr. Darshak Thakore 2, Deepali Kawdiya 3 1 Assistant Professor, Department of Computer Engineering, B.V.M, Gujarat, India 2 Assistant Professor, Department
A SURVEY ON HAND GESTURE RECOGNITION U.K. Jaliya 1, Dr. Darshak Thakore 2, Deepali Kawdiya 3 1 Assistant Professor, Department of Computer Engineering, B.V.M, Gujarat, India 2 Assistant Professor, Department
Multimedia-Systems: Image & Graphics
 Multimedia-Systems: Image & Graphics Prof. Dr.-Ing. Ralf Steinmetz Prof. Dr. Max Mühlhäuser MM: TU Darmstadt - Darmstadt University of Technology, Dept. of of Computer Science TK - Telecooperation, Tel.+49
Multimedia-Systems: Image & Graphics Prof. Dr.-Ing. Ralf Steinmetz Prof. Dr. Max Mühlhäuser MM: TU Darmstadt - Darmstadt University of Technology, Dept. of of Computer Science TK - Telecooperation, Tel.+49
Active Stereo Vision. COMP 4102A Winter 2014 Gerhard Roth Version 1
 Active Stereo Vision COMP 4102A Winter 2014 Gerhard Roth Version 1 Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can
Active Stereo Vision COMP 4102A Winter 2014 Gerhard Roth Version 1 Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can
Creating and Modifying Images Using Newton s Method for Solving Equations
 Bridges 2010: Mathematics, Music, Art, Architecture, Culture Creating and Modifying Images Using Newton s Method for Solving Equations Stanley Spencer The Sycamores Queens Road Hodthorpe Worksop Nottinghamshire,
Bridges 2010: Mathematics, Music, Art, Architecture, Culture Creating and Modifying Images Using Newton s Method for Solving Equations Stanley Spencer The Sycamores Queens Road Hodthorpe Worksop Nottinghamshire,
AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS. Nuno Sousa Eugénio Oliveira
 AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS Nuno Sousa Eugénio Oliveira Faculdade de Egenharia da Universidade do Porto, Portugal Abstract: This paper describes a platform that enables
AGENT PLATFORM FOR ROBOT CONTROL IN REAL-TIME DYNAMIC ENVIRONMENTS Nuno Sousa Eugénio Oliveira Faculdade de Egenharia da Universidade do Porto, Portugal Abstract: This paper describes a platform that enables
Color Constancy Using Standard Deviation of Color Channels
 2010 International Conference on Pattern Recognition Color Constancy Using Standard Deviation of Color Channels Anustup Choudhury and Gérard Medioni Department of Computer Science University of Southern
2010 International Conference on Pattern Recognition Color Constancy Using Standard Deviation of Color Channels Anustup Choudhury and Gérard Medioni Department of Computer Science University of Southern
APPLICATION OF COMPUTER VISION FOR DETERMINATION OF SYMMETRICAL OBJECT POSITION IN THREE DIMENSIONAL SPACE
 APPLICATION OF COMPUTER VISION FOR DETERMINATION OF SYMMETRICAL OBJECT POSITION IN THREE DIMENSIONAL SPACE Najirah Umar 1 1 Jurusan Teknik Informatika, STMIK Handayani Makassar Email : najirah_stmikh@yahoo.com
APPLICATION OF COMPUTER VISION FOR DETERMINATION OF SYMMETRICAL OBJECT POSITION IN THREE DIMENSIONAL SPACE Najirah Umar 1 1 Jurusan Teknik Informatika, STMIK Handayani Makassar Email : najirah_stmikh@yahoo.com
Tackling the Battery Problem for Continuous Mobile Vision
 Tackling the Battery Problem for Continuous Mobile Vision Victor Bahl Robert LeKamWa (MSR/Rice), Bodhi Priyantha, Mathai Philipose, Lin Zhong (MSR/Rice) June 11, 2013 MIT Technology Review Mobile Summit
Tackling the Battery Problem for Continuous Mobile Vision Victor Bahl Robert LeKamWa (MSR/Rice), Bodhi Priyantha, Mathai Philipose, Lin Zhong (MSR/Rice) June 11, 2013 MIT Technology Review Mobile Summit
International Conference on Advances in Engineering & Technology 2014 (ICAET-2014) 48 Page
 48 Page") Analysis of Visual Cryptography Schemes Using Adaptive Space Filling Curve Ordered Dithering V.Chinnapudevi 1, Dr.M.Narsing Yadav 2 1.Associate Professor, Dept of ECE, Brindavan Institute of Technology
Analysis of Visual Cryptography Schemes Using Adaptive Space Filling Curve Ordered Dithering V.Chinnapudevi 1, Dr.M.Narsing Yadav 2 1.Associate Professor, Dept of ECE, Brindavan Institute of Technology
Method for out-of-focus camera calibration
 2346 Vol. 55, No. 9 / March 20 2016 / Applied Optics Research Article Method for out-of-focus camera calibration TYLER BELL, 1 JING XU, 2 AND SONG ZHANG 1, * 1 School of Mechanical Engineering, Purdue
2346 Vol. 55, No. 9 / March 20 2016 / Applied Optics Research Article Method for out-of-focus camera calibration TYLER BELL, 1 JING XU, 2 AND SONG ZHANG 1, * 1 School of Mechanical Engineering, Purdue
Improved SIFT Matching for Image Pairs with a Scale Difference
 Improved SIFT Matching for Image Pairs with a Scale Difference Y. Bastanlar, A. Temizel and Y. Yardımcı Informatics Institute, Middle East Technical University, Ankara, 06531, Turkey Published in IET Electronics,
Improved SIFT Matching for Image Pairs with a Scale Difference Y. Bastanlar, A. Temizel and Y. Yardımcı Informatics Institute, Middle East Technical University, Ankara, 06531, Turkey Published in IET Electronics,