Using Line and Ellipse Features for Rectification of Broadcast Hockey Video
|
|
|
- Sharyl Willis
- 6 years ago
- Views:
Transcription
 The University of British Columbia Vancouver, Canada Email: ankgupta@cs.ubc.")
1 Using Line and Ellipse Features for Rectification of Broadcast Hockey Video Ankur Gupta, James J. Little, Robert J. Woodham Laboratory for Computational Intelligence (LCI) The University of British Columbia Vancouver, Canada Abstract To use hockey broadcast videos for automatic game analysis, we need to compensate for camera viewpoint and motion. This can be done by using features on the rink to estimate the homography between the observed rink and a geometric model of the rink, as specified in the appropriate rule book (top down view of the rink). However, player occlusion, wide range of camera motion, and frames with few reliable key-points all pose significant challenges for robustness and accuracy of the solution. In this work, we describe a new method to use line and ellipse features along with keypoint based matches to estimate the homography. We combine domain knowledge (i.e., rink geometry) with an appearance model of the rink to detect these features accurately. This overdetermines the homography estimation to make the system more robust. We show this approach is applicable to real world data and demonstrate the ability to track long sequences on the order of 1,000 frames. H 1 (a) Geometric model H Keywords-Homography; Rectification; Sports; Videos; Geometric error I. INTRODUCTION Automated sports video analysis is an active and challenging research area in computer vision. One of the important problems in this domain is to automatically estimate player locations and velocities relative to the ground. This information can be used to analyze [1] or even predict [2] game play. The problem is simpler in the case of videos obtained from a stationary camera. In the case of a moving camera, to obtain the trajectories of players on the field or rink (henceforth referred to as the rink), we need to estimate the transformation between the geometric model and each video frame (see Figure 1). All the images of a plane are related to each other by homographies [3]. Assuming the rink is a planar surface in the world, the geometric model of a rink is also related to its image with a homography. There are various features (lines, markings, logos, etc.) on the rink which can be used to estimate this transformation. Homography estimation given point matches between two images is a well studied problem, but there are no direct point matches available between the geometric model and a video frame (some point matches can be obtained by using curve intersections). However, there are other geometric shapes like lines and circles on (b) A video frame Figure 1. The problem definition: to estimate a best fitting transformation matrix H between (a) the geometric model of the rink and every frame in the sequence. (b) An example frame from the video is also shown with the transformed geometric model superimposed (shown in red). The inverse transformation H 1 can be used to map events in the frame coordinates to the world coordinates. This process is known as rectification. the rink surface which can be utilized to overcome this limitation. Lines transform to lines and circles transform to conics under perspective projection [3]. Please note the transformed conic is an ellipse in all the cases we encounter in this particular problem. These features can be detected and tracked in the sports video. In this work, we present a novel method to combine point, line and ellipse matches to get a homography estimate by extending the linear method for point matches (the DLT algorithm). We also propose an area-based geometric error measure, which can be minimized to fine-tune our linear estimate. We combine an appearance model (keyframes) with the geometric model of the rink to estimate the homography robustly over time. We test this system
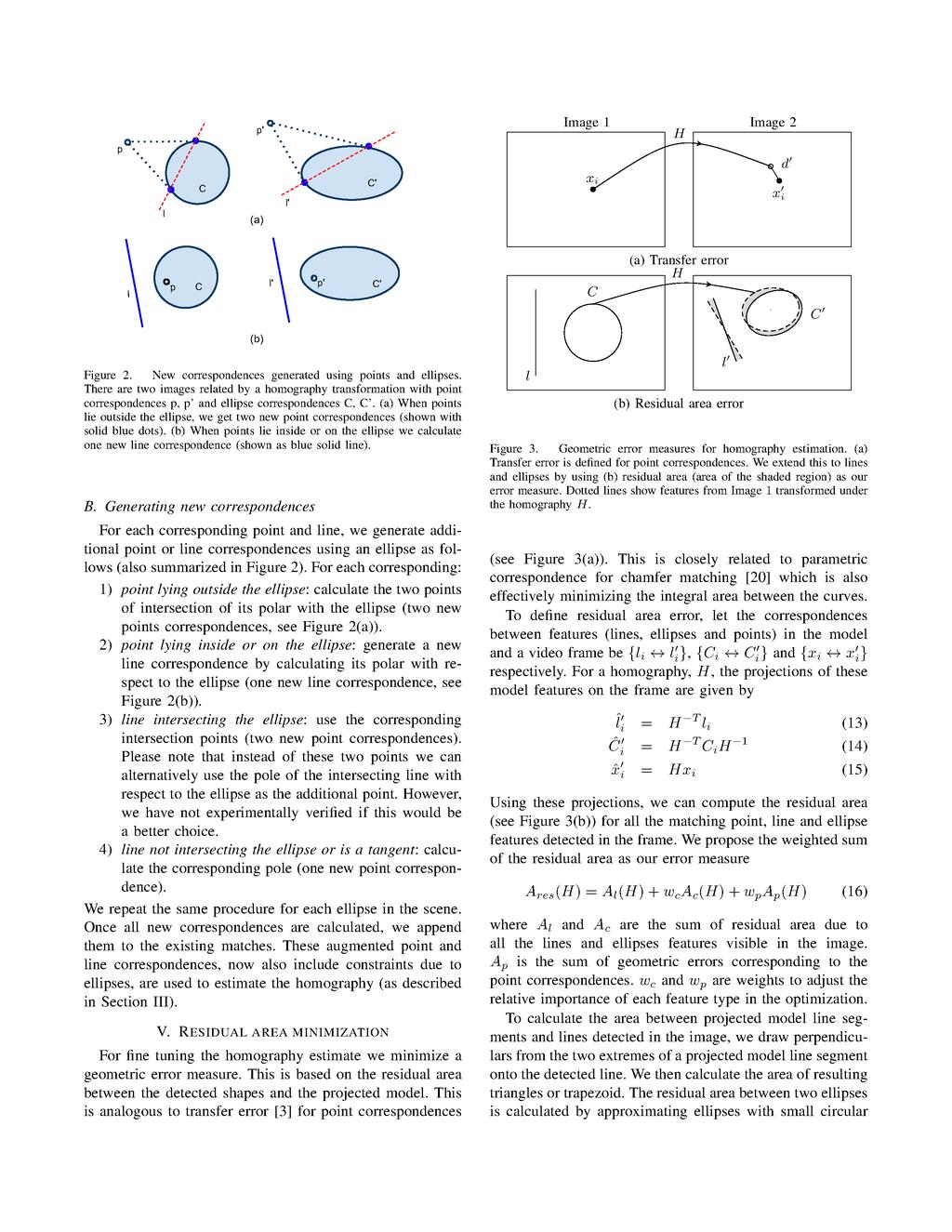
2 on a hockey video sequence. However, it can be easily generalized to other sports where there are similar features on the playing surface. This paper is organized as follows. In the next section, we discuss related work. Section III outlines mathematical preliminaries for homography estimation from point and line correspondences. Section IV describes our new approach to combine ellipses in the same framework. We discuss a new area based geometric error measure for homography estimation in Section V. In Section VI, we combine all these methods together to complete our system implementation. Experiments are described in Section VII, followed by discussion in Section VIII. II. RELATED WORK We are looking at the problem of sports video rectification. There are similar systems developed for hockey [4], soccer [5], tennis [6], and American football [7]. However, these systems differ in goals and scope. They often comprise multiple modules each dealing with different functionality e.g., feature detection, tracking and homography estimation. We look at the related work in each of these subproblems in the context of sports video rectification. A. Homography estimation A homography transformation can be estimated given a set of feature matches between two images. Four or more point correspondences provide enough constraints to obtain the homography using the DLT algorithm [3]. Lines being the dual of points can be similarly used for homography estimation [8]. Dubrofsky and Woodham [9] show how to combine line and point matches in the same image to estimate the homography using the DLT. Conic correspondences have also been used to estimate homographies as described in [10] [13]. However, these methods deal only with conics, they do not combine these constraints with other features. Conomis [13] suggests that a new set of invariant points can be obtained using conic correspondences. These point correspondences are then used to estimate the homography using the DLT. It can be shown that two conic correspondences are enough to solve for a homography [11]. Based on these methods ellipse features on the rink can be used to estimate the homography. However, there may not be two ellipses visible in the field of view of the camera in every frame. The DLT based algorithm for point (and line) matches is fast and easy to implement. However, one major limitation is that the DLT minimizes algebraic error which does not correspond to any geometrically meaningful quantity (see Section III for details). The homography estimate obtained using point matches with DLT is often refined by minimization of geometric error. Transfer error [3] is a commonly used error measure (see Figure 3(a)). However, there is no clear way to deal with combined minimization of geometric error in the case of line and ellipse features. B. Feature detection and tracking Detecting and tracking lines is one of the popular methods for estimating homographies over a sequence of frames [14], [15]. On a textureless field like a soccer pitch, lines prove to be useful features. However, usually there are not enough lines visible in each frame to uniquely determine the homography. The idea of using line features (boundary lines) to avoid drift while tracking planar surfaces is explored by Xu et al. [16]. They show that line features make tracking more accurate. However, when they do correction based on lines the point feature information is discarded. Farin et al. [6] use lines to calculate real and virtual points of intersection. These points are used to establish the homography between image and the model. They also define a geometric error measure which they minimize for estimating the homography based on lines. They project the white pixels (court lines in case of tennis) onto the model. The error measure is defined as the sum of the geometric distance between model lines and these projected points. Okuma et al. [4] also tackle the problem of rink rectification for hockey videos. Their approach is based on tracking point correspondences (using KLT [17]) to estimate the homography between consecutive frames (using RANSAC [18] for robustness). However, this leads to significant drift in homography estimate over time. They correct their estimate based on a geometric model of the rink by generating additional point correspondences. They achieve this by searching for points on the edges in the image along the normals at sampled points on lines and circles in the transformed model (using an approximate homography estimate). These additional point correspondences are then used to estimate the homography using the DLT. The two major limitations of this approach are: first, the nearest point chosen along the normal may not correspond to the actual ellipse or line feature on the frame. Second, final drift correction is based on the DLT; there is no geometric error minimization used to refine the estimate. Hess and Fern [7] demonstrate that using local features (e.g., SIFT [19]) can also be an alternative way to rectify sports video frames. They use a set of frames as reference images (or key-frames) with a known homography transform (obtained by manually establishing point correspondences). These reference images are then used to assemble a set of local features registered to the rink model. This model with registered key-frames is used to rectify frames based on point matches with each new frame. This approach is robust. However, its effectiveness is subject to the availability of sufficient point features well distributed across the rink. Also, this does not exploit any other information available apart from point matches.
3 III. PRELIMINARIES Let p i = [ x i y i w i ] T and p i = [ x i y i w i] T be corresponding points related by a homography, written in homogeneous coordinates. The homography matrix, H, by definition relates these points as p i = Hp i i {1...n p } (1) where n p is the number of point correspondences and H is a 3x3 matrix given by h 1 h 2 h 3 H = h 4 h 5 h 6 (2) h 7 h 8 h 9 Equation 1 can be rewritten in the form A i h = 0 (3) where h = [ ] T h 1 h 2 h 3 h 4 h 5 h 6 h 7 h 8 h 9 and A i is a 2 9 matrix given by [ ] 0 T w A i = i pt i y i pt i w i pt i 0 T x (4) i pt i The matrix A i for each point correspondence can be stacked to form a matrix A = [ A 1 A 2 A np ] T which satisfies the relation Ah = 0 (5) In case of an over-constrained system, a solution can be obtained by minimizing the cost function (algebraic distance): Ah. This is the DLT algorithm for point correspondences (see Hartley and Zisserman [3] for details). A. Normalization for points The DLT algorithm is sensitive to the choice of the coordinate frame (origin and scale). Hartley and Zisserman [3] suggest a normalization step to make the data well conditioned. A similarity transformation, S, is applied to transform points such that their centroid is at the origin and the average distance from the origin is 2 p i = Sp i i {1...n p } (6) where S is defined as s 0 t x S = 0 s t y (7) Corresponding points are also normalized by a similar transform S. The homography matrix H is computed using the DLT on these normalized correspondences. It is denormalized to get the homography estimate for original correspondences. H = S 1 HS (8) B. Adding lines A line ax + by + c = 0 can be represented as a vector of coefficients [ a b c ] T. Using this representation, the transformation of a line l i = [ p i q i r i ] T under the homography H is given by l i = H T l i or l i = H T l i (9) This is analogous to the point case described above and a similar relation as Equation 4 can be obtained. Additional rows corresponding to the line correspondences are appended to the matrix A in Equation 5. However, including lines in the same framework as points requires lines to be normalized with the same similarity transform S. Dubrofsky and Woodham [9] extend point normalization to lines as p i li = s q i (10) sr i t x p i t y q i Now, these lines can be treated uniformly along with the normalized points to estimate the homography. IV. ADDING ELLIPSES The coefficients of a conic cannot be treated in a similar way to lines and points. However, the constraints obtained from ellipses using existing points and lines in the scene can be transformed into additional line and point correspondences. A. Pole-polar relationship Let C be a matrix of coefficients of a conic. Any point x lying on the conic satisfies the relationship x T Cx = 0. The transformed conic under a homography H is given by C = H T CH 1 (11) A polar line corresponding to a point x in the plane is defined as l = Cx. It is straightforward to prove that if two points correspond in two images (transformed by a homography), their polar lines with respect to the corresponding conics in the images also transform under the same homography [13]. Let x and x be two matching points, C and C be matching conics in the images and l = Cx be the polar corresponding to pole x with respect to conic C. The polar in the corresponding image is given by l = C x = (H T CH 1 )(Hx) = H T Cx = H T l (12) We can similarly prove that if two lines l, l are transformed under a homography, H, then their poles x, x with respect to ellipses C, C also satisfy the relation x = Hx.
4
.")
5 Key-frame 1 Key-frame 3 Key-frame 5 Figure 4. The key-frames used in appearance model of the rink. Figure shows three key-frames with the transformed geometric model superimposed. The homography between these frames and the geometric model is obtained by manually selecting point correspondences. arcs (see Section 5.2 in [21] for details on area calculation). The error term for point matches is defined as A p (H) = i d(ˆx i,x i) 2 (17) Once we have the area calculation framework in place, the homography estimation problem can be formulated as H est = argmin(a res (H)) (18) H VI. SYSTEM IMPLEMENTATION We initialize the system by choosing a set of key-frames. Key-frames are images with overlapping features to cover the whole range of camera motion. In the current implementation, we manually select five frames from the sequence (see Figure 4). We also manually choose point correspondences between key-frames and the geometric model to estimate the homography for all the key-frames. For each new frame from the video first we identify the closest key-frame. We choose it on the basis of total number of local feature matches between a key-frame and the current frame, combined with the area covered by these matches (see Section in [21] for details). We use SFOP [22] based key-point detection along with SIFT [19] descriptors to generate point correspondences. We also use these point matches to obtain a rough estimate of the homography between the selected key-frame and the current frame. As we already have the homography for each of the key-frames, we can also calculate an initial homography estimate between the geometric model and the current frame by chaining these two estimates together. We use this approximate homography estimate to project the geometric model onto the current frame and use the location of transformed lines and circles as the basis to search for line and ellipse features in the frame. This model guided approach simplifies the line and ellipse detection problem (for details see Section 3.3 in [21]). We detect all the lines and ellipses corresponding to the features in the geometric model. However, there are no direct point matches available between the model and the current frame. We solve this problem by back-projecting point matches from the closest key-frame onto the model to obtain a set of point matches. We combine these features (line, point and ellipse) matches between the model and current frame to obtain a linear estimate for the homography (referred to as H lin ) using the approach described in Section IV. Consecutive frames in the video have a lot of overlapping features (assuming smooth camera motion). We again use SFOP-SIFT based local features to establish point correspondences between the last frame and the current frame. We estimate the homography using these point matches. Given the homography estimate for the last frame, we can multiply it with this frame to frame homography estimate to obtain another estimate for the homography between the model and the current frame. We refer to it as H tr. We can use one of these estimates (H lin or H tr ) as an initial value for the geometric minimization step (described in Section V). As observed by Okuma et al. [4], frame to frame estimation is prone to drift due to accumulation of error. On the other hand, H lin is sensitive to errors in detection. We choose between the two based on the residual area error for each of these initial estimates. A complete system diagram is shown in Figure 5 (see Section 5.3 in [21] for details). VII. EXPERIMENTS We test our system on a high-definition (HD) broadcast hockey video sequence with 1000 frames. A. Ground truth It is hard to generate ground truth for all the frames in the dataset. Ground truth in this case means the best possible homography fit for each frame. A good fit has to be visually evaluated by a user, as we do not have a clear way to quantitatively measure it. To simplify this problem, we only annotate a subset of frames from the 1000 frame sequence by selecting point correspondences between these frames and the geometric model. An initial estimate of the homography is obtained by these point matches which is used to detect line and ellipse features on these frames. We further refine the estimate by using geometric minimization of the residual area. The error measure does not go to zero even for these ground truth frames as features never align perfectly with the projected model. We refer to this error as the ground truth residual area. These annotated frames represent a close approximation to the perfect transformation
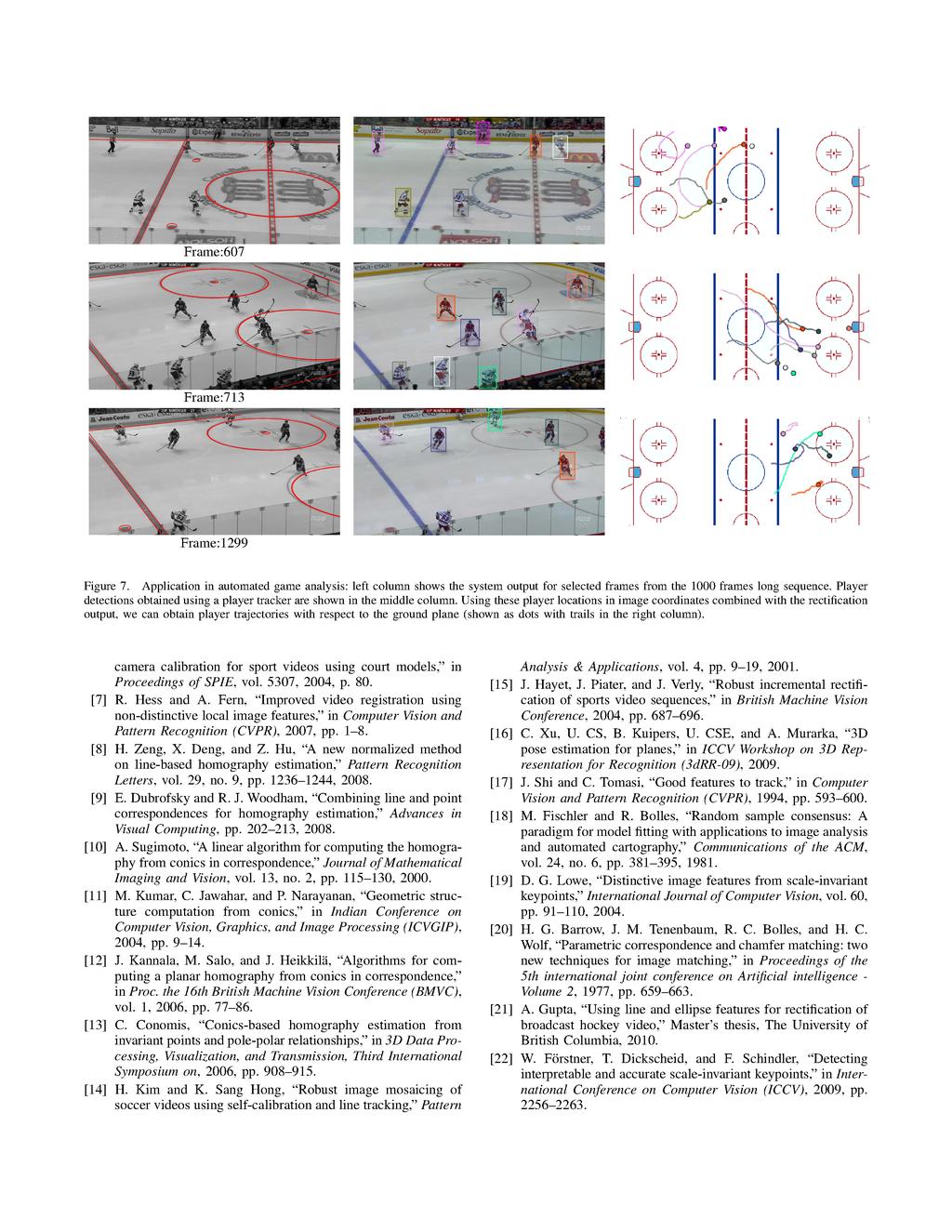
6 key-frames Linear homography estimation current frame previous frame H n 1 Frame to frame homography estimation Finally, we demonstrate an application based on our video rectification system (see Figure 7). The right column shows the player trajectories for the last 100 frames in the rink coordinates. Using this approach, given the scale of the geometric model, we can estimate player position and velocity with respect to the ground. H lin Tracking or detection? H init Geometric error minimization final homography estimate H tr Figure 5. Outline of the system implementation. Ovals represent data and rectangles denote software modules. between the geometric model and the video. We make sure the frames we choose have line and ellipse detections which are closely aligned with the actual features in the image. B. Error measure To evaluate a homography estimate we use the following error measure: we project the geometric model using the homography and calculate the residual area between projected features (only lines and ellipses, no points) and the detections in the ground truth frames. In the subsequent discussion, this error is referred as the residual area error for a given homography estimate in a particular frame. C. Results We evaluate the quantitative reduction in the residual area error due to this non-linear optimization. In Figure 6 we compare the error in homography estimation after the geometric error minimization to the linear homography estimate. We observe that there is a significant reduction in the error after the optimization step. We also find that the tracking is more stable (observe the variation in the error corresponding to the linear estimate in Figure 6 (top)). We test our system, using all the components and running it over a long image sequence. Figure 7 (left column) shows a few selected frames from the sequence with the model transformed by the estimated homography superimposed (in red). This shows that we are able to robustly estimate the homography for a long sequence accurately. We also observe that there is no error accumulation. The last frame is well aligned with the projected features from the model (see Frame:1299). This shows that the system can possibly continue to track a longer sequence. H n VIII. DISCUSSION We effectively combine the geometry, appearance and motion information to get a homography estimate between a geometric model of the rink and each frame in the sports video sequence. In this work, we focus on using the geometric shapes in the model as features to estimate the homography. To achieve this, we develop a method to incorporate ellipse features in homography estimation along with line and point features (which have been traditionally used to solve similar problems). We show that the minimization of an area based geometric error measure can be used to refine the linear estimate and stabilize tracking. We also combine the geometric model with an appearance model using the key-frame idea to add robustness to the system. The results we present show that our system is able to robustly track long sequences of the order of 1000 frames. We have tested our system only on hockey videos. However, as the geometric model of the rink is an input to the system, we expect it can be easily generalized to other sports. The major limitations of our current system are: we rely on line and ellipse features which are more robust to occlusion and motion blur compared to point matches. However, this makes our approach sensitive to errors in detections. RANSAC [18] can be applied in case of points, dealing with outliers in a mixed correspondence case is a topic for future work. We have also ignored the normalization for lines issue highlighted by Zeng et al. [8]. We do not deal with lens distortion in the image. Sports footage may have visible radial distortion and hence straight lines in the real world appear curved in the image, making the assumption of a homography inaccurate. Our method also assumes an accurate geometric model. However, not all rinks conform to the standard specifications. Building a model from the data itself can be an interesting direction for future work. The problem of automatic rectification holds great challenges and possibilities for interesting research. Even with its limitations, our approach is a significant next step towards combining a wider variety of heterogeneous scene information for homography estimation and also building an application that deals with actual broadcast video data. ACKNOWLEDGMENT The authors thank Dr. David Pearsall and Antoine Fortier from the Department of Kinesiology and Physical Education at McGill University for providing high quality HD data. Thanks to Kenji Okuma and Wei-lwun Lu for their player tracking application. Thanks to anonymous reviewers for
7 7 C Residual area error (normalized) A Residual area minimization Linear estimation B Frame index A B C Figure 6. The error in homography estimation after minimization of the geometric error compared with the linear estimate used as the initial value (top). Along the y-axis we have the residual area error, normalized by the ground truth residual area (as defined in SectionVII-B). The frame numbers are plotted along the x-axis. We also show homography estimates for three selected frames, denoted by A, B, and C. Left and right column (bottom) show the model superimposed on the frame using linear homography estimate and final output of the system for these three frames. their detailed and insightful feedback on the earlier draft of this paper. This research is funded by Natural Sciences and Engineering Research Council of Canada (NSERC). REFERENCES [1] F. Li and R. J. Woodham, Video analysis of hockey play in selected game situations, Image and Vision Computing, vol. 27, no. 1 2, pp , [2] K. Kim, M. Grundmann, A. Shamir, I. Matthews, J. Hodgins, and I. Essa, Motion fields to predict play evolution in dynamic sport scenes, in Computer Vision and Pattern Recognition (CVPR), 2010, pp [3] R. Hartley and A. Zisserman, Multiple view geometry in computer vision. Cambridge University Press New York, NY, USA, [4] K. Okuma, J. Little, and D. Lowe, Automatic rectification of long image sequences, in Asian Conference on Computer Vision, [5] J.-B. Hayet and J. Piater, On-line rectification of sport sequences with moving cameras, in MICAI 2007: Advances in Artificial Intelligence, ser. Lecture Notes in Computer Science. Springer Berlin / Heidelberg, 2007, vol. 4827, pp [6] D. Farin, S. Krabbe, H. Peter, and W. Effelsberg, Robust
8
Recognizing Panoramas
 Recognizing Panoramas Kevin Luo Stanford University 450 Serra Mall, Stanford, CA 94305 kluo8128@stanford.edu Abstract This project concerns the topic of panorama stitching. Given a set of overlapping photos,
Recognizing Panoramas Kevin Luo Stanford University 450 Serra Mall, Stanford, CA 94305 kluo8128@stanford.edu Abstract This project concerns the topic of panorama stitching. Given a set of overlapping photos,
Webcam Image Alignment
 Washington University in St. Louis Washington University Open Scholarship All Computer Science and Engineering Research Computer Science and Engineering Report Number: WUCSE-2011-46 2011 Webcam Image Alignment
Washington University in St. Louis Washington University Open Scholarship All Computer Science and Engineering Research Computer Science and Engineering Report Number: WUCSE-2011-46 2011 Webcam Image Alignment
FOCAL LENGTH CHANGE COMPENSATION FOR MONOCULAR SLAM
 FOCAL LENGTH CHANGE COMPENSATION FOR MONOCULAR SLAM Takafumi Taketomi Nara Institute of Science and Technology, Japan Janne Heikkilä University of Oulu, Finland ABSTRACT In this paper, we propose a method
FOCAL LENGTH CHANGE COMPENSATION FOR MONOCULAR SLAM Takafumi Taketomi Nara Institute of Science and Technology, Japan Janne Heikkilä University of Oulu, Finland ABSTRACT In this paper, we propose a method
Dual-fisheye Lens Stitching for 360-degree Imaging & Video. Tuan Ho, PhD. Student Electrical Engineering Dept., UT Arlington
 Dual-fisheye Lens Stitching for 360-degree Imaging & Video Tuan Ho, PhD. Student Electrical Engineering Dept., UT Arlington Introduction 360-degree imaging: the process of taking multiple photographs and
Dual-fisheye Lens Stitching for 360-degree Imaging & Video Tuan Ho, PhD. Student Electrical Engineering Dept., UT Arlington Introduction 360-degree imaging: the process of taking multiple photographs and
Discovering Panoramas in Web Videos
 Discovering Panoramas in Web Videos Feng Liu 1, Yu-hen Hu 2 and Michael Gleicher 1 1 Department of Computer Sciences 2 Department of Electrical and Comp. Engineering University of Wisconsin-Madison Discovering
Discovering Panoramas in Web Videos Feng Liu 1, Yu-hen Hu 2 and Michael Gleicher 1 1 Department of Computer Sciences 2 Department of Electrical and Comp. Engineering University of Wisconsin-Madison Discovering
Image stitching. Image stitching. Video summarization. Applications of image stitching. Stitching = alignment + blending. geometrical registration
 Image stitching Stitching = alignment + blending Image stitching geometrical registration photometric registration Digital Visual Effects, Spring 2006 Yung-Yu Chuang 2005/3/22 with slides by Richard Szeliski,
Image stitching Stitching = alignment + blending Image stitching geometrical registration photometric registration Digital Visual Effects, Spring 2006 Yung-Yu Chuang 2005/3/22 with slides by Richard Szeliski,
Localization (Position Estimation) Problem in WSN
 Problem in WSN") Localization (Position Estimation) Problem in WSN [1] Convex Position Estimation in Wireless Sensor Networks by L. Doherty, K.S.J. Pister, and L.E. Ghaoui [2] Semidefinite Programming for Ad Hoc Wireless
Localization (Position Estimation) Problem in WSN [1] Convex Position Estimation in Wireless Sensor Networks by L. Doherty, K.S.J. Pister, and L.E. Ghaoui [2] Semidefinite Programming for Ad Hoc Wireless
LENSLESS IMAGING BY COMPRESSIVE SENSING
 LENSLESS IMAGING BY COMPRESSIVE SENSING Gang Huang, Hong Jiang, Kim Matthews and Paul Wilford Bell Labs, Alcatel-Lucent, Murray Hill, NJ 07974 ABSTRACT In this paper, we propose a lensless compressive
LENSLESS IMAGING BY COMPRESSIVE SENSING Gang Huang, Hong Jiang, Kim Matthews and Paul Wilford Bell Labs, Alcatel-Lucent, Murray Hill, NJ 07974 ABSTRACT In this paper, we propose a lensless compressive
Homographies and Mosaics
 Homographies and Mosaics Jeffrey Martin (jeffrey-martin.com) with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2011 Why Mosaic? Are
Homographies and Mosaics Jeffrey Martin (jeffrey-martin.com) with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2011 Why Mosaic? Are
Midterm Examination CS 534: Computational Photography
 Midterm Examination CS 534: Computational Photography November 3, 2015 NAME: SOLUTIONS Problem Score Max Score 1 8 2 8 3 9 4 4 5 3 6 4 7 6 8 13 9 7 10 4 11 7 12 10 13 9 14 8 Total 100 1 1. [8] What are
Midterm Examination CS 534: Computational Photography November 3, 2015 NAME: SOLUTIONS Problem Score Max Score 1 8 2 8 3 9 4 4 5 3 6 4 7 6 8 13 9 7 10 4 11 7 12 10 13 9 14 8 Total 100 1 1. [8] What are
C.2 Equations and Graphs of Conic Sections
 0 section C C. Equations and Graphs of Conic Sections In this section, we give an overview of the main properties of the curves called conic sections. Geometrically, these curves can be defined as intersections
0 section C C. Equations and Graphs of Conic Sections In this section, we give an overview of the main properties of the curves called conic sections. Geometrically, these curves can be defined as intersections
Multi Viewpoint Panoramas
 27. November 2007 1 Motivation 2 Methods Slit-Scan "The System" 3 "The System" Approach Preprocessing Surface Selection Panorama Creation Interactive Renement 4 Sources Motivation image showing long continous
27. November 2007 1 Motivation 2 Methods Slit-Scan "The System" 3 "The System" Approach Preprocessing Surface Selection Panorama Creation Interactive Renement 4 Sources Motivation image showing long continous
Homographies and Mosaics
 Homographies and Mosaics Jeffrey Martin (jeffrey-martin.com) CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2014 Steve Seitz and
Homographies and Mosaics Jeffrey Martin (jeffrey-martin.com) CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2014 Steve Seitz and
Dimension Recognition and Geometry Reconstruction in Vectorization of Engineering Drawings
 Dimension Recognition and Geometry Reconstruction in Vectorization of Engineering Drawings Feng Su 1, Jiqiang Song 1, Chiew-Lan Tai 2, and Shijie Cai 1 1 State Key Laboratory for Novel Software Technology,
Dimension Recognition and Geometry Reconstruction in Vectorization of Engineering Drawings Feng Su 1, Jiqiang Song 1, Chiew-Lan Tai 2, and Shijie Cai 1 1 State Key Laboratory for Novel Software Technology,
Chapter 18 Optical Elements
 Chapter 18 Optical Elements GOALS When you have mastered the content of this chapter, you will be able to achieve the following goals: Definitions Define each of the following terms and use it in an operational
Chapter 18 Optical Elements GOALS When you have mastered the content of this chapter, you will be able to achieve the following goals: Definitions Define each of the following terms and use it in an operational
Rectified Mosaicing: Mosaics without the Curl* Shmuel Peleg
 Rectified Mosaicing: Mosaics without the Curl* Assaf Zomet Shmuel Peleg Chetan Arora School of Computer Science & Engineering The Hebrew University of Jerusalem 91904 Jerusalem Israel Kizna.com Inc. 5-10
Rectified Mosaicing: Mosaics without the Curl* Assaf Zomet Shmuel Peleg Chetan Arora School of Computer Science & Engineering The Hebrew University of Jerusalem 91904 Jerusalem Israel Kizna.com Inc. 5-10
Module 2 WAVE PROPAGATION (Lectures 7 to 9)
") Module 2 WAVE PROPAGATION (Lectures 7 to 9) Lecture 9 Topics 2.4 WAVES IN A LAYERED BODY 2.4.1 One-dimensional case: material boundary in an infinite rod 2.4.2 Three dimensional case: inclined waves 2.5
Module 2 WAVE PROPAGATION (Lectures 7 to 9) Lecture 9 Topics 2.4 WAVES IN A LAYERED BODY 2.4.1 One-dimensional case: material boundary in an infinite rod 2.4.2 Three dimensional case: inclined waves 2.5
ELEC Dr Reji Mathew Electrical Engineering UNSW
 ELEC 4622 Dr Reji Mathew Electrical Engineering UNSW Filter Design Circularly symmetric 2-D low-pass filter Pass-band radial frequency: ω p Stop-band radial frequency: ω s 1 δ p Pass-band tolerances: δ
ELEC 4622 Dr Reji Mathew Electrical Engineering UNSW Filter Design Circularly symmetric 2-D low-pass filter Pass-band radial frequency: ω p Stop-band radial frequency: ω s 1 δ p Pass-band tolerances: δ
Single Camera Catadioptric Stereo System
 Single Camera Catadioptric Stereo System Abstract In this paper, we present a framework for novel catadioptric stereo camera system that uses a single camera and a single lens with conic mirrors. Various
Single Camera Catadioptric Stereo System Abstract In this paper, we present a framework for novel catadioptric stereo camera system that uses a single camera and a single lens with conic mirrors. Various
A Novel Fuzzy Neural Network Based Distance Relaying Scheme
 902 IEEE TRANSACTIONS ON POWER DELIVERY, VOL. 15, NO. 3, JULY 2000 A Novel Fuzzy Neural Network Based Distance Relaying Scheme P. K. Dash, A. K. Pradhan, and G. Panda Abstract This paper presents a new
902 IEEE TRANSACTIONS ON POWER DELIVERY, VOL. 15, NO. 3, JULY 2000 A Novel Fuzzy Neural Network Based Distance Relaying Scheme P. K. Dash, A. K. Pradhan, and G. Panda Abstract This paper presents a new
ON THE CREATION OF PANORAMIC IMAGES FROM IMAGE SEQUENCES
 ON THE CREATION OF PANORAMIC IMAGES FROM IMAGE SEQUENCES Petteri PÖNTINEN Helsinki University of Technology, Institute of Photogrammetry and Remote Sensing, Finland petteri.pontinen@hut.fi KEY WORDS: Cocentricity,
ON THE CREATION OF PANORAMIC IMAGES FROM IMAGE SEQUENCES Petteri PÖNTINEN Helsinki University of Technology, Institute of Photogrammetry and Remote Sensing, Finland petteri.pontinen@hut.fi KEY WORDS: Cocentricity,
A Machine Tool Controller using Cascaded Servo Loops and Multiple Feedback Sensors per Axis
 A Machine Tool Controller using Cascaded Servo Loops and Multiple Sensors per Axis David J. Hopkins, Timm A. Wulff, George F. Weinert Lawrence Livermore National Laboratory 7000 East Ave, L-792, Livermore,
A Machine Tool Controller using Cascaded Servo Loops and Multiple Sensors per Axis David J. Hopkins, Timm A. Wulff, George F. Weinert Lawrence Livermore National Laboratory 7000 East Ave, L-792, Livermore,
10 GRAPHING LINEAR EQUATIONS
 0 GRAPHING LINEAR EQUATIONS We now expand our discussion of the single-variable equation to the linear equation in two variables, x and y. Some examples of linear equations are x+ y = 0, y = 3 x, x= 4,
0 GRAPHING LINEAR EQUATIONS We now expand our discussion of the single-variable equation to the linear equation in two variables, x and y. Some examples of linear equations are x+ y = 0, y = 3 x, x= 4,
Overview. Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image
 Camera & Color Overview Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image Book: Hartley 6.1, Szeliski 2.1.5, 2.2, 2.3 The trip
Camera & Color Overview Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image Book: Hartley 6.1, Szeliski 2.1.5, 2.2, 2.3 The trip
Toward an Augmented Reality System for Violin Learning Support
 Toward an Augmented Reality System for Violin Learning Support Hiroyuki Shiino, François de Sorbier, and Hideo Saito Graduate School of Science and Technology, Keio University, Yokohama, Japan {shiino,fdesorbi,saito}@hvrl.ics.keio.ac.jp
Toward an Augmented Reality System for Violin Learning Support Hiroyuki Shiino, François de Sorbier, and Hideo Saito Graduate School of Science and Technology, Keio University, Yokohama, Japan {shiino,fdesorbi,saito}@hvrl.ics.keio.ac.jp
Laboratory 1: Uncertainty Analysis
 University of Alabama Department of Physics and Astronomy PH101 / LeClair May 26, 2014 Laboratory 1: Uncertainty Analysis Hypothesis: A statistical analysis including both mean and standard deviation can
University of Alabama Department of Physics and Astronomy PH101 / LeClair May 26, 2014 Laboratory 1: Uncertainty Analysis Hypothesis: A statistical analysis including both mean and standard deviation can
Blind Blur Estimation Using Low Rank Approximation of Cepstrum
 Blind Blur Estimation Using Low Rank Approximation of Cepstrum Adeel A. Bhutta and Hassan Foroosh School of Electrical Engineering and Computer Science, University of Central Florida, 4 Central Florida
Blind Blur Estimation Using Low Rank Approximation of Cepstrum Adeel A. Bhutta and Hassan Foroosh School of Electrical Engineering and Computer Science, University of Central Florida, 4 Central Florida
A Three-Channel Model for Generating the Vestibulo-Ocular Reflex in Each Eye
 A Three-Channel Model for Generating the Vestibulo-Ocular Reflex in Each Eye LAURENCE R. HARRIS, a KARL A. BEYKIRCH, b AND MICHAEL FETTER c a Department of Psychology, York University, Toronto, Canada
A Three-Channel Model for Generating the Vestibulo-Ocular Reflex in Each Eye LAURENCE R. HARRIS, a KARL A. BEYKIRCH, b AND MICHAEL FETTER c a Department of Psychology, York University, Toronto, Canada
Digital Image Processing. Lecture # 6 Corner Detection & Color Processing
 Digital Image Processing Lecture # 6 Corner Detection & Color Processing 1 Corners Corners (interest points) Unlike edges, corners (patches of pixels surrounding the corner) do not necessarily correspond
Digital Image Processing Lecture # 6 Corner Detection & Color Processing 1 Corners Corners (interest points) Unlike edges, corners (patches of pixels surrounding the corner) do not necessarily correspond
Figure 1. Mr Bean cartoon
 Dan Diggins MSc Computer Animation 2005 Major Animation Assignment Live Footage Tooning using FilterMan 1 Introduction This report discusses the processes and techniques used to convert live action footage
Dan Diggins MSc Computer Animation 2005 Major Animation Assignment Live Footage Tooning using FilterMan 1 Introduction This report discusses the processes and techniques used to convert live action footage
Photographing Long Scenes with Multiviewpoint
 Photographing Long Scenes with Multiviewpoint Panoramas A. Agarwala, M. Agrawala, M. Cohen, D. Salesin, R. Szeliski Presenter: Stacy Hsueh Discussant: VasilyVolkov Motivation Want an image that shows an
Photographing Long Scenes with Multiviewpoint Panoramas A. Agarwala, M. Agrawala, M. Cohen, D. Salesin, R. Szeliski Presenter: Stacy Hsueh Discussant: VasilyVolkov Motivation Want an image that shows an
Image Enhancement Using Frame Extraction Through Time
 Image Enhancement Using Frame Extraction Through Time Elliott Coleshill University of Guelph CIS Guelph, Ont, Canada ecoleshill@cogeco.ca Dr. Alex Ferworn Ryerson University NCART Toronto, Ont, Canada
Image Enhancement Using Frame Extraction Through Time Elliott Coleshill University of Guelph CIS Guelph, Ont, Canada ecoleshill@cogeco.ca Dr. Alex Ferworn Ryerson University NCART Toronto, Ont, Canada
Recognizing Words in Scenes with a Head-Mounted Eye-Tracker
 Recognizing Words in Scenes with a Head-Mounted Eye-Tracker Takuya Kobayashi, Takumi Toyama, Faisal Shafait, Masakazu Iwamura, Koichi Kise and Andreas Dengel Graduate School of Engineering Osaka Prefecture
Recognizing Words in Scenes with a Head-Mounted Eye-Tracker Takuya Kobayashi, Takumi Toyama, Faisal Shafait, Masakazu Iwamura, Koichi Kise and Andreas Dengel Graduate School of Engineering Osaka Prefecture
Math + 4 (Red) SEMESTER 1. { Pg. 1 } Unit 1: Whole Number Sense. Unit 2: Whole Number Operations. Unit 3: Applications of Operations
 SEMESTER 1. { Pg. 1 } Unit 1: Whole Number Sense. Unit 2: Whole Number Operations. Unit 3: Applications of Operations") Math + 4 (Red) This research-based course focuses on computational fluency, conceptual understanding, and problem-solving. The engaging course features new graphics, learning tools, and games; adaptive
Math + 4 (Red) This research-based course focuses on computational fluency, conceptual understanding, and problem-solving. The engaging course features new graphics, learning tools, and games; adaptive
Impeding Forgers at Photo Inception
 Impeding Forgers at Photo Inception Matthias Kirchner a, Peter Winkler b and Hany Farid c a International Computer Science Institute Berkeley, Berkeley, CA 97, USA b Department of Mathematics, Dartmouth
Impeding Forgers at Photo Inception Matthias Kirchner a, Peter Winkler b and Hany Farid c a International Computer Science Institute Berkeley, Berkeley, CA 97, USA b Department of Mathematics, Dartmouth
Dynamic Distortion Correction for Endoscopy Systems with Exchangeable Optics
 Lehrstuhl für Bildverarbeitung Institute of Imaging & Computer Vision Dynamic Distortion Correction for Endoscopy Systems with Exchangeable Optics Thomas Stehle and Michael Hennes and Sebastian Gross and
Lehrstuhl für Bildverarbeitung Institute of Imaging & Computer Vision Dynamic Distortion Correction for Endoscopy Systems with Exchangeable Optics Thomas Stehle and Michael Hennes and Sebastian Gross and
Analytic Geometry/ Trigonometry
 Analytic Geometry/ Trigonometry Course Numbers 1206330, 1211300 Lake County School Curriculum Map Released 2010-2011 Page 1 of 33 PREFACE Teams of Lake County teachers created the curriculum maps in order
Analytic Geometry/ Trigonometry Course Numbers 1206330, 1211300 Lake County School Curriculum Map Released 2010-2011 Page 1 of 33 PREFACE Teams of Lake County teachers created the curriculum maps in order
CHAPTER-4 FRUIT QUALITY GRADATION USING SHAPE, SIZE AND DEFECT ATTRIBUTES
 CHAPTER-4 FRUIT QUALITY GRADATION USING SHAPE, SIZE AND DEFECT ATTRIBUTES In addition to colour based estimation of apple quality, various models have been suggested to estimate external attribute based
CHAPTER-4 FRUIT QUALITY GRADATION USING SHAPE, SIZE AND DEFECT ATTRIBUTES In addition to colour based estimation of apple quality, various models have been suggested to estimate external attribute based
GEOMETRIC RECTIFICATION OF EUROPEAN HISTORICAL ARCHIVES OF LANDSAT 1-3 MSS IMAGERY
 GEOMETRIC RECTIFICATION OF EUROPEAN HISTORICAL ARCHIVES OF LANDSAT -3 MSS IMAGERY Torbjörn Westin Satellus AB P.O.Box 427, SE-74 Solna, Sweden tw@ssc.se KEYWORDS: Landsat, MSS, rectification, orbital model
GEOMETRIC RECTIFICATION OF EUROPEAN HISTORICAL ARCHIVES OF LANDSAT -3 MSS IMAGERY Torbjörn Westin Satellus AB P.O.Box 427, SE-74 Solna, Sweden tw@ssc.se KEYWORDS: Landsat, MSS, rectification, orbital model
MIT CSAIL Advances in Computer Vision Fall Problem Set 6: Anaglyph Camera Obscura
 MIT CSAIL 6.869 Advances in Computer Vision Fall 2013 Problem Set 6: Anaglyph Camera Obscura Posted: Tuesday, October 8, 2013 Due: Thursday, October 17, 2013 You should submit a hard copy of your work
MIT CSAIL 6.869 Advances in Computer Vision Fall 2013 Problem Set 6: Anaglyph Camera Obscura Posted: Tuesday, October 8, 2013 Due: Thursday, October 17, 2013 You should submit a hard copy of your work
Restoration of Motion Blurred Document Images
 Restoration of Motion Blurred Document Images Bolan Su 12, Shijian Lu 2 and Tan Chew Lim 1 1 Department of Computer Science,School of Computing,National University of Singapore Computing 1, 13 Computing
Restoration of Motion Blurred Document Images Bolan Su 12, Shijian Lu 2 and Tan Chew Lim 1 1 Department of Computer Science,School of Computing,National University of Singapore Computing 1, 13 Computing
Continuous Flash. October 1, Technical Report MSR-TR Microsoft Research Microsoft Corporation One Microsoft Way Redmond, WA 98052
 Continuous Flash Hugues Hoppe Kentaro Toyama October 1, 2003 Technical Report MSR-TR-2003-63 Microsoft Research Microsoft Corporation One Microsoft Way Redmond, WA 98052 Page 1 of 7 Abstract To take a
Continuous Flash Hugues Hoppe Kentaro Toyama October 1, 2003 Technical Report MSR-TR-2003-63 Microsoft Research Microsoft Corporation One Microsoft Way Redmond, WA 98052 Page 1 of 7 Abstract To take a
Introduction to DSP ECE-S352 Fall Quarter 2000 Matlab Project 1
 Objective: Introduction to DSP ECE-S352 Fall Quarter 2000 Matlab Project 1 This Matlab Project is an extension of the basic correlation theory presented in the course. It shows a practical application
Objective: Introduction to DSP ECE-S352 Fall Quarter 2000 Matlab Project 1 This Matlab Project is an extension of the basic correlation theory presented in the course. It shows a practical application
A Prototype Wire Position Monitoring System
 LCLS-TN-05-27 A Prototype Wire Position Monitoring System Wei Wang and Zachary Wolf Metrology Department, SLAC 1. INTRODUCTION ¹ The Wire Position Monitoring System (WPM) will track changes in the transverse
LCLS-TN-05-27 A Prototype Wire Position Monitoring System Wei Wang and Zachary Wolf Metrology Department, SLAC 1. INTRODUCTION ¹ The Wire Position Monitoring System (WPM) will track changes in the transverse
Sensors and Sensing Cameras and Camera Calibration
 Sensors and Sensing Cameras and Camera Calibration Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 20.11.2014
Sensors and Sensing Cameras and Camera Calibration Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 20.11.2014
DIGITAL IMAGE PROCESSING UNIT III
 DIGITAL IMAGE PROCESSING UNIT III 3.1 Image Enhancement in Frequency Domain: Frequency refers to the rate of repetition of some periodic events. In image processing, spatial frequency refers to the variation
DIGITAL IMAGE PROCESSING UNIT III 3.1 Image Enhancement in Frequency Domain: Frequency refers to the rate of repetition of some periodic events. In image processing, spatial frequency refers to the variation
IMAGE PROCESSING TECHNIQUES FOR CROWD DENSITY ESTIMATION USING A REFERENCE IMAGE
 Second Asian Conference on Computer Vision (ACCV9), Singapore, -8 December, Vol. III, pp. 6-1 (invited) IMAGE PROCESSING TECHNIQUES FOR CROWD DENSITY ESTIMATION USING A REFERENCE IMAGE Jia Hong Yin, Sergio
Second Asian Conference on Computer Vision (ACCV9), Singapore, -8 December, Vol. III, pp. 6-1 (invited) IMAGE PROCESSING TECHNIQUES FOR CROWD DENSITY ESTIMATION USING A REFERENCE IMAGE Jia Hong Yin, Sergio
Image Extraction using Image Mining Technique
 IOSR Journal of Engineering (IOSRJEN) e-issn: 2250-3021, p-issn: 2278-8719 Vol. 3, Issue 9 (September. 2013), V2 PP 36-42 Image Extraction using Image Mining Technique Prof. Samir Kumar Bandyopadhyay,
IOSR Journal of Engineering (IOSRJEN) e-issn: 2250-3021, p-issn: 2278-8719 Vol. 3, Issue 9 (September. 2013), V2 PP 36-42 Image Extraction using Image Mining Technique Prof. Samir Kumar Bandyopadhyay,
1.Discuss the frequency domain techniques of image enhancement in detail.
 1.Discuss the frequency domain techniques of image enhancement in detail. Enhancement In Frequency Domain: The frequency domain methods of image enhancement are based on convolution theorem. This is represented
1.Discuss the frequency domain techniques of image enhancement in detail. Enhancement In Frequency Domain: The frequency domain methods of image enhancement are based on convolution theorem. This is represented
Developing Algebraic Thinking
 Developing Algebraic Thinking DEVELOPING ALGEBRAIC THINKING Algebra is an important branch of mathematics, both historically and presently. algebra has been too often misunderstood and misrepresented as
Developing Algebraic Thinking DEVELOPING ALGEBRAIC THINKING Algebra is an important branch of mathematics, both historically and presently. algebra has been too often misunderstood and misrepresented as
GREATER CLARK COUNTY SCHOOLS PACING GUIDE. Grade 4 Mathematics GREATER CLARK COUNTY SCHOOLS
 GREATER CLARK COUNTY SCHOOLS PACING GUIDE Grade 4 Mathematics 2014-2015 GREATER CLARK COUNTY SCHOOLS ANNUAL PACING GUIDE Learning Old Format New Format Q1LC1 4.NBT.1, 4.NBT.2, 4.NBT.3, (4.1.1, 4.1.2,
GREATER CLARK COUNTY SCHOOLS PACING GUIDE Grade 4 Mathematics 2014-2015 GREATER CLARK COUNTY SCHOOLS ANNUAL PACING GUIDE Learning Old Format New Format Q1LC1 4.NBT.1, 4.NBT.2, 4.NBT.3, (4.1.1, 4.1.2,
A Geometric Correction Method of Plane Image Based on OpenCV
 Sensors & Transducers 204 by IFSA Publishing, S. L. http://www.sensorsportal.com A Geometric orrection Method of Plane Image ased on OpenV Li Xiaopeng, Sun Leilei, 2 Lou aiying, Liu Yonghong ollege of
Sensors & Transducers 204 by IFSA Publishing, S. L. http://www.sensorsportal.com A Geometric orrection Method of Plane Image ased on OpenV Li Xiaopeng, Sun Leilei, 2 Lou aiying, Liu Yonghong ollege of
Face detection, face alignment, and face image parsing
 Lecture overview Face detection, face alignment, and face image parsing Brandon M. Smith Guest Lecturer, CS 534 Monday, October 21, 2013 Brief introduction to local features Face detection Face alignment
Lecture overview Face detection, face alignment, and face image parsing Brandon M. Smith Guest Lecturer, CS 534 Monday, October 21, 2013 Brief introduction to local features Face detection Face alignment
Improving Signal- to- noise Ratio in Remotely Sensed Imagery Using an Invertible Blur Technique
 Improving Signal- to- noise Ratio in Remotely Sensed Imagery Using an Invertible Blur Technique Linda K. Le a and Carl Salvaggio a a Rochester Institute of Technology, Center for Imaging Science, Digital
Improving Signal- to- noise Ratio in Remotely Sensed Imagery Using an Invertible Blur Technique Linda K. Le a and Carl Salvaggio a a Rochester Institute of Technology, Center for Imaging Science, Digital
Computational Rephotography
 Computational Rephotography SOONMIN BAE MIT Computer Science and Artificial Intelligence Laboratory ASEEM AGARWALA Abobe Systems, Inc. and FRÉDO DURAND MIT Computer Science and Artificial Intelligence
Computational Rephotography SOONMIN BAE MIT Computer Science and Artificial Intelligence Laboratory ASEEM AGARWALA Abobe Systems, Inc. and FRÉDO DURAND MIT Computer Science and Artificial Intelligence
Computer Vision-based Mathematics Learning Enhancement. for Children with Visual Impairments
 Computer Vision-based Mathematics Learning Enhancement for Children with Visual Impairments Chenyang Zhang 1, Mohsin Shabbir 1, Despina Stylianou 2, and Yingli Tian 1 1 Department of Electrical Engineering,
Computer Vision-based Mathematics Learning Enhancement for Children with Visual Impairments Chenyang Zhang 1, Mohsin Shabbir 1, Despina Stylianou 2, and Yingli Tian 1 1 Department of Electrical Engineering,
Improved SIFT Matching for Image Pairs with a Scale Difference
 Improved SIFT Matching for Image Pairs with a Scale Difference Y. Bastanlar, A. Temizel and Y. Yardımcı Informatics Institute, Middle East Technical University, Ankara, 06531, Turkey Published in IET Electronics,
Improved SIFT Matching for Image Pairs with a Scale Difference Y. Bastanlar, A. Temizel and Y. Yardımcı Informatics Institute, Middle East Technical University, Ankara, 06531, Turkey Published in IET Electronics,
multiframe visual-inertial blur estimation and removal for unmodified smartphones
 multiframe visual-inertial blur estimation and removal for unmodified smartphones, Severin Münger, Carlo Beltrame, Luc Humair WSCG 2015, Plzen, Czech Republic images taken by non-professional photographers
multiframe visual-inertial blur estimation and removal for unmodified smartphones, Severin Münger, Carlo Beltrame, Luc Humair WSCG 2015, Plzen, Czech Republic images taken by non-professional photographers
Edge-Raggedness Evaluation Using Slanted-Edge Analysis
 Edge-Raggedness Evaluation Using Slanted-Edge Analysis Peter D. Burns Eastman Kodak Company, Rochester, NY USA 14650-1925 ABSTRACT The standard ISO 12233 method for the measurement of spatial frequency
Edge-Raggedness Evaluation Using Slanted-Edge Analysis Peter D. Burns Eastman Kodak Company, Rochester, NY USA 14650-1925 ABSTRACT The standard ISO 12233 method for the measurement of spatial frequency
Princeton University COS429 Computer Vision Problem Set 1: Building a Camera
 Princeton University COS429 Computer Vision Problem Set 1: Building a Camera What to submit: You need to submit two files: one PDF file for the report that contains your name, Princeton NetID, all the
Princeton University COS429 Computer Vision Problem Set 1: Building a Camera What to submit: You need to submit two files: one PDF file for the report that contains your name, Princeton NetID, all the
Vehicle Speed Estimation Using GPS/RISS (Reduced Inertial Sensor System)
") ISSC 2013, LYIT Letterkenny, June 20 21 Vehicle Speed Estimation Using GPS/RISS (Reduced Inertial Sensor System) Thomas O Kane and John V. Ringwood Department of Electronic Engineering National University
ISSC 2013, LYIT Letterkenny, June 20 21 Vehicle Speed Estimation Using GPS/RISS (Reduced Inertial Sensor System) Thomas O Kane and John V. Ringwood Department of Electronic Engineering National University
Multimodal Face Recognition using Hybrid Correlation Filters
 Multimodal Face Recognition using Hybrid Correlation Filters Anamika Dubey, Abhishek Sharma Electrical Engineering Department, Indian Institute of Technology Roorkee, India {ana.iitr, abhisharayiya}@gmail.com
Multimodal Face Recognition using Hybrid Correlation Filters Anamika Dubey, Abhishek Sharma Electrical Engineering Department, Indian Institute of Technology Roorkee, India {ana.iitr, abhisharayiya}@gmail.com
CPSC 425: Computer Vision
 1 / 55 CPSC 425: Computer Vision Instructor: Fred Tung ftung@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2015/2016 Term 2 2 / 55 Menu January 7, 2016 Topics: Image
1 / 55 CPSC 425: Computer Vision Instructor: Fred Tung ftung@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2015/2016 Term 2 2 / 55 Menu January 7, 2016 Topics: Image
Camera Based EAN-13 Barcode Verification with Hough Transform and Sub-Pixel Edge Detection
 First National Conference on Algorithms and Intelligent Systems, 03-04 February, 2012 1 Camera Based EAN-13 Barcode Verification with Hough Transform and Sub-Pixel Edge Detection Harsh Kapadia M.Tech IC
First National Conference on Algorithms and Intelligent Systems, 03-04 February, 2012 1 Camera Based EAN-13 Barcode Verification with Hough Transform and Sub-Pixel Edge Detection Harsh Kapadia M.Tech IC
Variable-depth streamer acquisition: broadband data for imaging and inversion
 P-246 Variable-depth streamer acquisition: broadband data for imaging and inversion Robert Soubaras, Yves Lafet and Carl Notfors*, CGGVeritas Summary This paper revisits the problem of receiver deghosting,
P-246 Variable-depth streamer acquisition: broadband data for imaging and inversion Robert Soubaras, Yves Lafet and Carl Notfors*, CGGVeritas Summary This paper revisits the problem of receiver deghosting,
Parallax-Free Long Bone X-ray Image Stitching
 Parallax-Free Long Bone X-ray Image Stitching Lejing Wang 1,JoergTraub 1, Simon Weidert 2, Sandro Michael Heining 2, Ekkehard Euler 2, and Nassir Navab 1 1 Chair for Computer Aided Medical Procedures (CAMP),
Parallax-Free Long Bone X-ray Image Stitching Lejing Wang 1,JoergTraub 1, Simon Weidert 2, Sandro Michael Heining 2, Ekkehard Euler 2, and Nassir Navab 1 1 Chair for Computer Aided Medical Procedures (CAMP),
2.1 Partial Derivatives
 .1 Partial Derivatives.1.1 Functions of several variables Up until now, we have only met functions of single variables. From now on we will meet functions such as z = f(x, y) and w = f(x, y, z), which
.1 Partial Derivatives.1.1 Functions of several variables Up until now, we have only met functions of single variables. From now on we will meet functions such as z = f(x, y) and w = f(x, y, z), which
Colour correction for panoramic imaging
 Colour correction for panoramic imaging Gui Yun Tian Duke Gledhill Dave Taylor The University of Huddersfield David Clarke Rotography Ltd Abstract: This paper reports the problem of colour distortion in
Colour correction for panoramic imaging Gui Yun Tian Duke Gledhill Dave Taylor The University of Huddersfield David Clarke Rotography Ltd Abstract: This paper reports the problem of colour distortion in
*Unit 1 Constructions and Transformations
 *Unit 1 Constructions and Transformations Content Area: Mathematics Course(s): Geometry CP, Geometry Honors Time Period: September Length: 10 blocks Status: Published Transfer Skills Previous coursework:
*Unit 1 Constructions and Transformations Content Area: Mathematics Course(s): Geometry CP, Geometry Honors Time Period: September Length: 10 blocks Status: Published Transfer Skills Previous coursework:
Automatic Ground Truth Generation of Camera Captured Documents Using Document Image Retrieval
 Automatic Ground Truth Generation of Camera Captured Documents Using Document Image Retrieval Sheraz Ahmed, Koichi Kise, Masakazu Iwamura, Marcus Liwicki, and Andreas Dengel German Research Center for
Automatic Ground Truth Generation of Camera Captured Documents Using Document Image Retrieval Sheraz Ahmed, Koichi Kise, Masakazu Iwamura, Marcus Liwicki, and Andreas Dengel German Research Center for
SECTION I - CHAPTER 2 DIGITAL IMAGING PROCESSING CONCEPTS
 RADT 3463 - COMPUTERIZED IMAGING Section I: Chapter 2 RADT 3463 Computerized Imaging 1 SECTION I - CHAPTER 2 DIGITAL IMAGING PROCESSING CONCEPTS RADT 3463 COMPUTERIZED IMAGING Section I: Chapter 2 RADT
RADT 3463 - COMPUTERIZED IMAGING Section I: Chapter 2 RADT 3463 Computerized Imaging 1 SECTION I - CHAPTER 2 DIGITAL IMAGING PROCESSING CONCEPTS RADT 3463 COMPUTERIZED IMAGING Section I: Chapter 2 RADT
Image Processing & Projective geometry
 Image Processing & Projective geometry Arunkumar Byravan Partial slides borrowed from Jianbo Shi & Steve Seitz Color spaces RGB Red, Green, Blue HSV Hue, Saturation, Value Why HSV? HSV separates luma,
Image Processing & Projective geometry Arunkumar Byravan Partial slides borrowed from Jianbo Shi & Steve Seitz Color spaces RGB Red, Green, Blue HSV Hue, Saturation, Value Why HSV? HSV separates luma,
Multiresolution Analysis of Connectivity
 Multiresolution Analysis of Connectivity Atul Sajjanhar 1, Guojun Lu 2, Dengsheng Zhang 2, Tian Qi 3 1 School of Information Technology Deakin University 221 Burwood Highway Burwood, VIC 3125 Australia
Multiresolution Analysis of Connectivity Atul Sajjanhar 1, Guojun Lu 2, Dengsheng Zhang 2, Tian Qi 3 1 School of Information Technology Deakin University 221 Burwood Highway Burwood, VIC 3125 Australia
Application of GIS to Fast Track Planning and Monitoring of Development Agenda
 Application of GIS to Fast Track Planning and Monitoring of Development Agenda Radiometric, Atmospheric & Geometric Preprocessing of Optical Remote Sensing 13 17 June 2018 Outline 1. Why pre-process remotely
Application of GIS to Fast Track Planning and Monitoring of Development Agenda Radiometric, Atmospheric & Geometric Preprocessing of Optical Remote Sensing 13 17 June 2018 Outline 1. Why pre-process remotely
Fig Color spectrum seen by passing white light through a prism.
 1. Explain about color fundamentals. Color of an object is determined by the nature of the light reflected from it. When a beam of sunlight passes through a glass prism, the emerging beam of light is not
1. Explain about color fundamentals. Color of an object is determined by the nature of the light reflected from it. When a beam of sunlight passes through a glass prism, the emerging beam of light is not
Real-Time Scanning Goniometric Radiometer for Rapid Characterization of Laser Diodes and VCSELs
 Real-Time Scanning Goniometric Radiometer for Rapid Characterization of Laser Diodes and VCSELs Jeffrey L. Guttman, John M. Fleischer, and Allen M. Cary Photon, Inc. 6860 Santa Teresa Blvd., San Jose,
Real-Time Scanning Goniometric Radiometer for Rapid Characterization of Laser Diodes and VCSELs Jeffrey L. Guttman, John M. Fleischer, and Allen M. Cary Photon, Inc. 6860 Santa Teresa Blvd., San Jose,
An Adaptive Kernel-Growing Median Filter for High Noise Images. Jacob Laurel. Birmingham, AL, USA. Birmingham, AL, USA
 An Adaptive Kernel-Growing Median Filter for High Noise Images Jacob Laurel Department of Electrical and Computer Engineering, University of Alabama at Birmingham, Birmingham, AL, USA Electrical and Computer
An Adaptive Kernel-Growing Median Filter for High Noise Images Jacob Laurel Department of Electrical and Computer Engineering, University of Alabama at Birmingham, Birmingham, AL, USA Electrical and Computer
Unit 1: Image Formation
 Unit 1: Image Formation 1. Geometry 2. Optics 3. Photometry 4. Sensor Readings Szeliski 2.1-2.3 & 6.3.5 1 Physical parameters of image formation Geometric Type of projection Camera pose Optical Sensor
Unit 1: Image Formation 1. Geometry 2. Optics 3. Photometry 4. Sensor Readings Szeliski 2.1-2.3 & 6.3.5 1 Physical parameters of image formation Geometric Type of projection Camera pose Optical Sensor
Appendix. Harmonic Balance Simulator. Page 1
 Appendix Harmonic Balance Simulator Page 1 Harmonic Balance for Large Signal AC and S-parameter Simulation Harmonic Balance is a frequency domain analysis technique for simulating distortion in nonlinear
Appendix Harmonic Balance Simulator Page 1 Harmonic Balance for Large Signal AC and S-parameter Simulation Harmonic Balance is a frequency domain analysis technique for simulating distortion in nonlinear
Deep Green. System for real-time tracking and playing the board game Reversi. Final Project Submitted by: Nadav Erell
 Deep Green System for real-time tracking and playing the board game Reversi Final Project Submitted by: Nadav Erell Introduction to Computational and Biological Vision Department of Computer Science, Ben-Gurion
Deep Green System for real-time tracking and playing the board game Reversi Final Project Submitted by: Nadav Erell Introduction to Computational and Biological Vision Department of Computer Science, Ben-Gurion
3D-Position Estimation for Hand Gesture Interface Using a Single Camera
 3D-Position Estimation for Hand Gesture Interface Using a Single Camera Seung-Hwan Choi, Ji-Hyeong Han, and Jong-Hwan Kim Department of Electrical Engineering, KAIST, Gusung-Dong, Yusung-Gu, Daejeon, Republic
3D-Position Estimation for Hand Gesture Interface Using a Single Camera Seung-Hwan Choi, Ji-Hyeong Han, and Jong-Hwan Kim Department of Electrical Engineering, KAIST, Gusung-Dong, Yusung-Gu, Daejeon, Republic
Spoofing GPS Receiver Clock Offset of Phasor Measurement Units 1
 Spoofing GPS Receiver Clock Offset of Phasor Measurement Units 1 Xichen Jiang (in collaboration with J. Zhang, B. J. Harding, J. J. Makela, and A. D. Domínguez-García) Department of Electrical and Computer
Spoofing GPS Receiver Clock Offset of Phasor Measurement Units 1 Xichen Jiang (in collaboration with J. Zhang, B. J. Harding, J. J. Makela, and A. D. Domínguez-García) Department of Electrical and Computer
Efficient Construction of SIFT Multi-Scale Image Pyramids for Embedded Robot Vision
 Efficient Construction of SIFT Multi-Scale Image Pyramids for Embedded Robot Vision Peter Andreas Entschev and Hugo Vieira Neto Graduate School of Electrical Engineering and Applied Computer Science Federal
Efficient Construction of SIFT Multi-Scale Image Pyramids for Embedded Robot Vision Peter Andreas Entschev and Hugo Vieira Neto Graduate School of Electrical Engineering and Applied Computer Science Federal
Bode plot, named after Hendrik Wade Bode, is usually a combination of a Bode magnitude plot and Bode phase plot:
 Bode plot From Wikipedia, the free encyclopedia A The Bode plot for a first-order (one-pole) lowpass filter Bode plot, named after Hendrik Wade Bode, is usually a combination of a Bode magnitude plot and
Bode plot From Wikipedia, the free encyclopedia A The Bode plot for a first-order (one-pole) lowpass filter Bode plot, named after Hendrik Wade Bode, is usually a combination of a Bode magnitude plot and
Computational Re-Photography Soonmin Bae, Aseem Agarwala, and Fredo Durand
 Computer Science and Artificial Intelligence Laboratory Technical Report MIT-CSAIL-TR-2010-016 CBCL-287 April 7, 2010 Computational Re-Photography Soonmin Bae, Aseem Agarwala, and Fredo Durand massachusetts
Computer Science and Artificial Intelligence Laboratory Technical Report MIT-CSAIL-TR-2010-016 CBCL-287 April 7, 2010 Computational Re-Photography Soonmin Bae, Aseem Agarwala, and Fredo Durand massachusetts
Square & Square Roots
 Square & Square Roots 1. If a natural number m can be expressed as n², where n is also a natural number, then m is a square number. 2. All square numbers end with, 1, 4, 5, 6 or 9 at unit s place. All
Square & Square Roots 1. If a natural number m can be expressed as n², where n is also a natural number, then m is a square number. 2. All square numbers end with, 1, 4, 5, 6 or 9 at unit s place. All
Manifesting a Blackboard Image Restore and Mosaic using Multifeature Registration Algorithm
 Manifesting a Blackboard Image Restore and Mosaic using Multifeature Registration Algorithm Priyanka Virendrasinh Jadeja 1, Dr. Dhaval R. Bhojani 2 1 Department of Electronics and Communication Engineering,
Manifesting a Blackboard Image Restore and Mosaic using Multifeature Registration Algorithm Priyanka Virendrasinh Jadeja 1, Dr. Dhaval R. Bhojani 2 1 Department of Electronics and Communication Engineering,
IMAGE FORMATION. Light source properties. Sensor characteristics Surface. Surface reflectance properties. Optics
 IMAGE FORMATION Light source properties Sensor characteristics Surface Exposure shape Optics Surface reflectance properties ANALOG IMAGES An image can be understood as a 2D light intensity function f(x,y)
IMAGE FORMATION Light source properties Sensor characteristics Surface Exposure shape Optics Surface reflectance properties ANALOG IMAGES An image can be understood as a 2D light intensity function f(x,y)
Live Hand Gesture Recognition using an Android Device
 Live Hand Gesture Recognition using an Android Device Mr. Yogesh B. Dongare Department of Computer Engineering. G.H.Raisoni College of Engineering and Management, Ahmednagar. Email- yogesh.dongare05@gmail.com
Live Hand Gesture Recognition using an Android Device Mr. Yogesh B. Dongare Department of Computer Engineering. G.H.Raisoni College of Engineering and Management, Ahmednagar. Email- yogesh.dongare05@gmail.com
UNIT 5a STANDARD ORTHOGRAPHIC VIEW DRAWINGS
 UNIT 5a STANDARD ORTHOGRAPHIC VIEW DRAWINGS 5.1 Introduction Orthographic views are 2D images of a 3D object obtained by viewing it from different orthogonal directions. Six principal views are possible
UNIT 5a STANDARD ORTHOGRAPHIC VIEW DRAWINGS 5.1 Introduction Orthographic views are 2D images of a 3D object obtained by viewing it from different orthogonal directions. Six principal views are possible
Two strategies for realistic rendering capture real world data synthesize from bottom up
 Recap from Wednesday Two strategies for realistic rendering capture real world data synthesize from bottom up Both have existed for 500 years. Both are successful. Attempts to take the best of both world
Recap from Wednesday Two strategies for realistic rendering capture real world data synthesize from bottom up Both have existed for 500 years. Both are successful. Attempts to take the best of both world
Image Searches, Abstraction, Invariance : Data Mining 2 September 2009
 Image Searches, Abstraction, Invariance 36-350: Data Mining 2 September 2009 1 Medical: x-rays, brain imaging, histology ( do these look like cancerous cells? ) Satellite imagery Fingerprints Finding illustrations
Image Searches, Abstraction, Invariance 36-350: Data Mining 2 September 2009 1 Medical: x-rays, brain imaging, histology ( do these look like cancerous cells? ) Satellite imagery Fingerprints Finding illustrations
Linear Gaussian Method to Detect Blurry Digital Images using SIFT
 IJCAES ISSN: 2231-4946 Volume III, Special Issue, November 2013 International Journal of Computer Applications in Engineering Sciences Special Issue on Emerging Research Areas in Computing(ERAC) www.caesjournals.org
IJCAES ISSN: 2231-4946 Volume III, Special Issue, November 2013 International Journal of Computer Applications in Engineering Sciences Special Issue on Emerging Research Areas in Computing(ERAC) www.caesjournals.org
Space-Time Super-Resolution
 Space-Time Super-Resolution Eli Shechtman Yaron Caspi Michal Irani Dept. of Comp. Science and Applied Math School of Engineering and Comp. Science The Weizmann Institute of Science Rehovot 76100, Israel
Space-Time Super-Resolution Eli Shechtman Yaron Caspi Michal Irani Dept. of Comp. Science and Applied Math School of Engineering and Comp. Science The Weizmann Institute of Science Rehovot 76100, Israel
Advances in Averaged Switch Modeling
 Advances in Averaged Switch Modeling Robert W. Erickson Power Electronics Group University of Colorado Boulder, Colorado USA 80309-0425 rwe@boulder.colorado.edu http://ece-www.colorado.edu/~pwrelect 1
Advances in Averaged Switch Modeling Robert W. Erickson Power Electronics Group University of Colorado Boulder, Colorado USA 80309-0425 rwe@boulder.colorado.edu http://ece-www.colorado.edu/~pwrelect 1
IEEE TRANSACTIONS ON IMAGE PROCESSING VOL. XX, NO. X, MONTH YEAR 1. Affine Covariant Features for Fisheye Distortion Local Modelling
 IEEE TRANSACTIONS ON IMAGE PROCESSING VOL. XX, NO. X, MONTH YEAR Affine Covariant Features for Fisheye Distortion Local Modelling Antonino Furnari, Giovanni Maria Farinella, Member, IEEE, Arcangelo Ranieri
IEEE TRANSACTIONS ON IMAGE PROCESSING VOL. XX, NO. X, MONTH YEAR Affine Covariant Features for Fisheye Distortion Local Modelling Antonino Furnari, Giovanni Maria Farinella, Member, IEEE, Arcangelo Ranieri
Autonomous Underwater Vehicle Navigation.
 Autonomous Underwater Vehicle Navigation. We are aware that electromagnetic energy cannot propagate appreciable distances in the ocean except at very low frequencies. As a result, GPS-based and other such
Autonomous Underwater Vehicle Navigation. We are aware that electromagnetic energy cannot propagate appreciable distances in the ocean except at very low frequencies. As a result, GPS-based and other such
Surveillance and Calibration Verification Using Autoassociative Neural Networks
 Surveillance and Calibration Verification Using Autoassociative Neural Networks Darryl J. Wrest, J. Wesley Hines, and Robert E. Uhrig* Department of Nuclear Engineering, University of Tennessee, Knoxville,
Surveillance and Calibration Verification Using Autoassociative Neural Networks Darryl J. Wrest, J. Wesley Hines, and Robert E. Uhrig* Department of Nuclear Engineering, University of Tennessee, Knoxville,
Adaptive f-xy Hankel matrix rank reduction filter to attenuate coherent noise Nirupama (Pam) Nagarajappa*, CGGVeritas
 Nagarajappa*, CGGVeritas") Adaptive f-xy Hankel matrix rank reduction filter to attenuate coherent noise Nirupama (Pam) Nagarajappa*, CGGVeritas Summary The reliability of seismic attribute estimation depends on reliable signal.
Adaptive f-xy Hankel matrix rank reduction filter to attenuate coherent noise Nirupama (Pam) Nagarajappa*, CGGVeritas Summary The reliability of seismic attribute estimation depends on reliable signal.
Investigations of Fuzzy Logic Controller for Sensorless Switched Reluctance Motor Drive
 IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 2320-3331, Volume 11, Issue 1 Ver. I (Jan Feb. 2016), PP 30-35 www.iosrjournals.org Investigations of Fuzzy
IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 2320-3331, Volume 11, Issue 1 Ver. I (Jan Feb. 2016), PP 30-35 www.iosrjournals.org Investigations of Fuzzy