Adaptive Touch Sampling for Energy-Efficient Mobile Platforms
|
|
|
- Conrad Warren
- 5 years ago
- Views:
Transcription

1 Adaptive Touch Sampling for Energy-Efficient Mobile Platforms Kyungtae Han Intel Labs, USA Alexander W. Min, Dongho Hong, Yong-joon Park Intel Corporation, USA April 16, 2015



2 Touch Interface in Today s Mobile Platforms To enable interactive and responsive applications 2




3 Challenges in Mobile Touch Systems Power-responsiveness tradeoff Find optimum responsiveness for users & apps Today s approach: One optimal frequency for all users and apps Slow Responsiveness Fast Sample power consumption in touch controller and panel 3

4 Our Approach: Adaptive Sampling Intelligently adapts the touch responsiveness on-the-fly based on user touch behavior Fast touch behavior Fast sampling rate Slow touch behavior Slow sampling rate Result: Up-to 44% power savings in touch controller and panel 4
5 Outline Background Our Approach Evaluation Conclusion 5
")
6 Touch Screen System User touch events are delivered to Processor at the rate of touch scan interval (frequency) 6






7 Touch Output of Circle Drawing Fast drawing Slow drawing Not enough samples Too many samples Conventional Approach: Fixed Scan Interval 7
8 Outline Background Our Approach Evaluation Conclusion 8



9 Adaptive Scan Interval Scan Interval Fast drawing Slow drawing Short Medium Long Our Approach: Scan Interval is dynamically changed based on user touch behavior 9



10 Adaptive Touch Sampling Approach Provide a touch feedback loop Estimate touch sampling distance Compare touch samples Update the touch scan intervals 10

11 Proposed Adaptive Touch Scan Rate Architecture Feedback loop keeping the same distance between traveled and reference 11

12 System Architecture Distance Estimator Calculate the sample distance between two consecutive touch samples 12
13 System Architecture Comparator Calculate the error between sample distance and pre-defined reference distance 13
14 System Architecture Scan Rate Update Update the touch scan interval based on error components with their associated weights 14








15 Adaptive Touch Scan Rate Algorithm Estimate touch sampling distance Compare touch samples Touch Feedback loop Calculate scan interval Update the touch scan interval 15
16 Outline Background Our Approach Evaluation Conclusion 16
17 Touch Drawing Simulations Use robot arm for controlled experiments of touch drawing Fast motion drawings cm/sec, cm/sec in Avg. Slow motion drawings 2.75 ~ cm/sec in Avg. 17
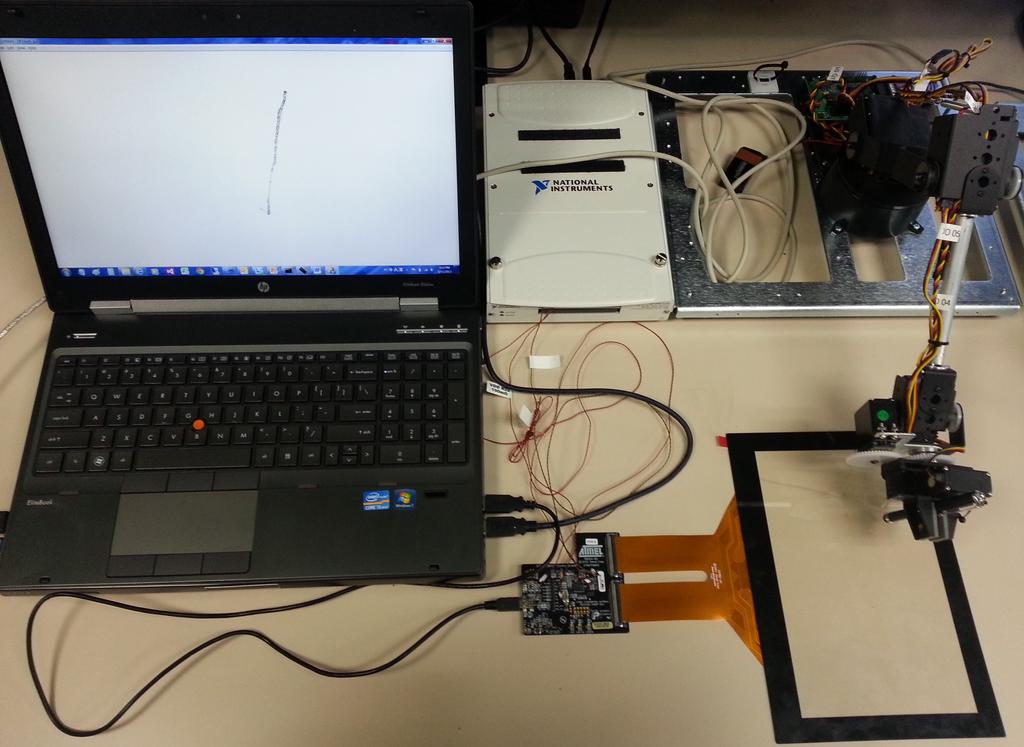





18 Experiment Setup Power Measurement Robot Arm Touch Panel (10 ) Host Computer 18
19 Fast Touch Drawing Today Approach Our Approach Number of Touch Samples (per one draw) Drawing Test Today Approach Our Approach Fast 1 (23.33 cm/sec) Fast 2 (40.00 cm/sec) Number of samples are increased for fast drawing 19

20 Slow Touch Drawing Today Approach Our Approach 20
 101 64 Slow 2 (6.")
 379 113 Slow 5 (2.")
21 Slow Touch Drawing Drawing Test (cm/sec) Today Approach Our Approach Slow 1 (12.73) Slow 2 (6.67) Slow 3 (4.52) Slow 4 (3.41) Slow 5 (2.75) Number of samples are decreased for slow drawing 21

 Up-to 44% power savings for Slow Drawing while")
22 Power Consumption for Different Drawing Speed Power (Normalized) Conventional Proposed Slow Fast Avg. Drawing Speed (cm/sec) Up-to 44% power savings for Slow Drawing while responsiveness improvement for Fast Drawing 22
23 Conclusion Touch subsystem is energy hungry Our approach demonstrates adaptation of touch sampling rate to user touch behavior The energy consumption can be dramatically reduced by 44% Can be applicable to other human and sensor interfaces to improve energy efficiencies 23


24 THANK YOU! 24
Laboratory Seven Stepper Motor and Feedback Control
 EE3940 Microprocessor Systems Laboratory Prof. Andrew Campbell Spring 2003 Groups Names Laboratory Seven Stepper Motor and Feedback Control In this experiment you will experiment with a stepper motor and
EE3940 Microprocessor Systems Laboratory Prof. Andrew Campbell Spring 2003 Groups Names Laboratory Seven Stepper Motor and Feedback Control In this experiment you will experiment with a stepper motor and
Design of High-Precision Infrared Multi-Touch Screen Based on the EFM32
 Sensors & Transducers 204 by IFSA Publishing, S. L. http://www.sensorsportal.com Design of High-Precision Infrared Multi-Touch Screen Based on the EFM32 Zhong XIAOLING, Guo YONG, Zhang WEI, Xie XINGHONG,
Sensors & Transducers 204 by IFSA Publishing, S. L. http://www.sensorsportal.com Design of High-Precision Infrared Multi-Touch Screen Based on the EFM32 Zhong XIAOLING, Guo YONG, Zhang WEI, Xie XINGHONG,
Training Schedule. Robotic System Design using Arduino Platform
 Training Schedule Robotic System Design using Arduino Platform Session - 1 Embedded System Design Basics : Scope : To introduce Embedded Systems hardware design fundamentals to students. Processor Selection
Training Schedule Robotic System Design using Arduino Platform Session - 1 Embedded System Design Basics : Scope : To introduce Embedded Systems hardware design fundamentals to students. Processor Selection
Bio-Inspired Walking: A FPGA multicore system for a legged robot
 Bio-Inspired Walking: A FPGA multicore system for a legged robot Michael Henrey 1 (mah3@sfu.ca), Sean Edmond 1, Lesley Shannon 2, and Carlo Menon 1 1. MENRVA Lab 2. Reconfigurable Computing Lab School
Bio-Inspired Walking: A FPGA multicore system for a legged robot Michael Henrey 1 (mah3@sfu.ca), Sean Edmond 1, Lesley Shannon 2, and Carlo Menon 1 1. MENRVA Lab 2. Reconfigurable Computing Lab School
Distribution Statement A (Approved for Public Release, Distribution Unlimited)
") www.darpa.mil 14 Programmatic Approach Focus teams on autonomy by providing capable Government-Furnished Equipment Enables quantitative comparison based exclusively on autonomy, not on mobility Teams add
www.darpa.mil 14 Programmatic Approach Focus teams on autonomy by providing capable Government-Furnished Equipment Enables quantitative comparison based exclusively on autonomy, not on mobility Teams add
Nao Devils Dortmund. Team Description for RoboCup Matthias Hofmann, Ingmar Schwarz, and Oliver Urbann
 Nao Devils Dortmund Team Description for RoboCup 2014 Matthias Hofmann, Ingmar Schwarz, and Oliver Urbann Robotics Research Institute Section Information Technology TU Dortmund University 44221 Dortmund,
Nao Devils Dortmund Team Description for RoboCup 2014 Matthias Hofmann, Ingmar Schwarz, and Oliver Urbann Robotics Research Institute Section Information Technology TU Dortmund University 44221 Dortmund,
Evaluation of CPU Frequency Transition Latency
 Evaluation of CPU Frequency Transition Latency Abdelhafid Mazouz 1 Alexandre Laurent 1 Benoît Pradelle 1 William Jalby 1 1 University of Versailles Saint-Quentin-en-Yvelines, France ENA-HPC 2013, Dresden
Evaluation of CPU Frequency Transition Latency Abdelhafid Mazouz 1 Alexandre Laurent 1 Benoît Pradelle 1 William Jalby 1 1 University of Versailles Saint-Quentin-en-Yvelines, France ENA-HPC 2013, Dresden
Robo-Erectus Tr-2010 TeenSize Team Description Paper.
 Robo-Erectus Tr-2010 TeenSize Team Description Paper. Buck Sin Ng, Carlos A. Acosta Calderon, Nguyen The Loan, Guohua Yu, Chin Hock Tey, Pik Kong Yue and Changjiu Zhou. Advanced Robotics and Intelligent
Robo-Erectus Tr-2010 TeenSize Team Description Paper. Buck Sin Ng, Carlos A. Acosta Calderon, Nguyen The Loan, Guohua Yu, Chin Hock Tey, Pik Kong Yue and Changjiu Zhou. Advanced Robotics and Intelligent
Session 11 Introduction to Robotics and Programming mbot. >_ {Code4Loop}; Roochir Purani
 Session 11 Introduction to Robotics and Programming mbot >_ {Code4Loop}; Roochir Purani RECAP from last 2 sessions 3D Programming with Events and Messages Homework Review /Questions Understanding 3D Programming
Session 11 Introduction to Robotics and Programming mbot >_ {Code4Loop}; Roochir Purani RECAP from last 2 sessions 3D Programming with Events and Messages Homework Review /Questions Understanding 3D Programming
LAB 1 Linear Motion and Freefall
 Cabrillo College Physics 10L Name LAB 1 Linear Motion and Freefall Read Hewitt Chapter 3 What to learn and explore A bat can fly around in the dark without bumping into things by sensing the echoes of
Cabrillo College Physics 10L Name LAB 1 Linear Motion and Freefall Read Hewitt Chapter 3 What to learn and explore A bat can fly around in the dark without bumping into things by sensing the echoes of
DEVELOPING INTELLIGENT SYSTEMS METHODS, BEST PRACTICE AND CHALLENGES
 DEVELOPING INTELLIGENT SYSTEMS METHODS, BEST PRACTICE AND CHALLENGES Prof. Dr.-Ing. habil. Ansgar Trächtler Folie 1 DEVELOPING INTELLIGENT SYSTEMS METHODS, BEST PRACTICE AND CHALLENGES Outline 1. Introduction
DEVELOPING INTELLIGENT SYSTEMS METHODS, BEST PRACTICE AND CHALLENGES Prof. Dr.-Ing. habil. Ansgar Trächtler Folie 1 DEVELOPING INTELLIGENT SYSTEMS METHODS, BEST PRACTICE AND CHALLENGES Outline 1. Introduction
Arduino STEAM Academy Arduino STEM Academy Art without Engineering is dreaming. Engineering without Art is calculating. - Steven K.
 Arduino STEAM Academy Arduino STEM Academy Art without Engineering is dreaming. Engineering without Art is calculating. - Steven K. Roberts Page 1 See Appendix A, for Licensing Attribution information
Arduino STEAM Academy Arduino STEM Academy Art without Engineering is dreaming. Engineering without Art is calculating. - Steven K. Roberts Page 1 See Appendix A, for Licensing Attribution information
Context-aware Decision Making for Maze Solving
 RiTA 2012, Gwangju, Korea Context-aware Decision Making for Maze Solving 2012.12.18 Robot Inetelligence Technology Lab, KAIST Sheir Afgen Zaheer and Jong-Hwan Kim {sheir, johkim}@rit.kaist.ac.kr Contents
RiTA 2012, Gwangju, Korea Context-aware Decision Making for Maze Solving 2012.12.18 Robot Inetelligence Technology Lab, KAIST Sheir Afgen Zaheer and Jong-Hwan Kim {sheir, johkim}@rit.kaist.ac.kr Contents
Nebraska 4-H Robotics and GPS/GIS and SPIRIT Robotics Projects
 Name: Club or School: Robots Knowledge Survey (Pre) Multiple Choice: For each of the following questions, circle the letter of the answer that best answers the question. 1. A robot must be in order to
Name: Club or School: Robots Knowledge Survey (Pre) Multiple Choice: For each of the following questions, circle the letter of the answer that best answers the question. 1. A robot must be in order to
Here Comes the Sun. The Challenge
 Here Comes the Sun This activity requires ROBOLAB 2.0 or higher, the Infrared Transmitter and cable #9713, RCX #9709, elab sets #9680 and #9681. The Challenge Invent a car that finds the optimal light
Here Comes the Sun This activity requires ROBOLAB 2.0 or higher, the Infrared Transmitter and cable #9713, RCX #9709, elab sets #9680 and #9681. The Challenge Invent a car that finds the optimal light
Kid-Size Humanoid Soccer Robot Design by TKU Team
 Kid-Size Humanoid Soccer Robot Design by TKU Team Ching-Chang Wong, Kai-Hsiang Huang, Yueh-Yang Hu, and Hsiang-Min Chan Department of Electrical Engineering, Tamkang University Tamsui, Taipei, Taiwan E-mail:
Kid-Size Humanoid Soccer Robot Design by TKU Team Ching-Chang Wong, Kai-Hsiang Huang, Yueh-Yang Hu, and Hsiang-Min Chan Department of Electrical Engineering, Tamkang University Tamsui, Taipei, Taiwan E-mail:
Hyperspectral imaging (HSI) goes embedded All rights reserved Max Larin, 1
 goes embedded All rights reserved Max Larin, 1") Hyperspectral imaging (HSI) goes embedded 2015 All rights reserved Max Larin, max.larin@ximea.com 1 Hyperspectral Imaging (HSI) goes embedded Seeing the invisible with Miniature intelligent HSI Cameras
Hyperspectral imaging (HSI) goes embedded 2015 All rights reserved Max Larin, max.larin@ximea.com 1 Hyperspectral Imaging (HSI) goes embedded Seeing the invisible with Miniature intelligent HSI Cameras
Multisensory Based Manipulation Architecture
 Marine Robot and Dexterous Manipulatin for Enabling Multipurpose Intevention Missions WP7 Multisensory Based Manipulation Architecture GIRONA 2012 Y2 Review Meeting Pedro J Sanz IRS Lab http://www.irs.uji.es/
Marine Robot and Dexterous Manipulatin for Enabling Multipurpose Intevention Missions WP7 Multisensory Based Manipulation Architecture GIRONA 2012 Y2 Review Meeting Pedro J Sanz IRS Lab http://www.irs.uji.es/
RANDOM TRAINING SET UP
 RANDOM TRAINING SET UP FITLIGHT Trainer Select Performance & Training Select Random Training 6 6 8 3 7 4 3 9 5 0 5 6 7 8.The deactivation distance can be set from 0 cms to 80 cms.. The time out can be
RANDOM TRAINING SET UP FITLIGHT Trainer Select Performance & Training Select Random Training 6 6 8 3 7 4 3 9 5 0 5 6 7 8.The deactivation distance can be set from 0 cms to 80 cms.. The time out can be
Multi Robot Navigation and Mapping for Combat Environment
 Multi Robot Navigation and Mapping for Combat Environment Senior Project Proposal By: Nick Halabi & Scott Tipton Project Advisor: Dr. Aleksander Malinowski Date: December 10, 2009 Project Summary The Multi
Multi Robot Navigation and Mapping for Combat Environment Senior Project Proposal By: Nick Halabi & Scott Tipton Project Advisor: Dr. Aleksander Malinowski Date: December 10, 2009 Project Summary The Multi
Upgrading from Stepper to Servo
 Upgrading from Stepper to Servo Switching to Servos Provides Benefits, Here s How to Reduce the Cost and Challenges Byline: Scott Carlberg, Motion Product Marketing Manager, Yaskawa America, Inc. The customers
Upgrading from Stepper to Servo Switching to Servos Provides Benefits, Here s How to Reduce the Cost and Challenges Byline: Scott Carlberg, Motion Product Marketing Manager, Yaskawa America, Inc. The customers
DIGITAL SPINDLE DRIVE TECHNOLOGY ADVANCEMENTS AND PERFORMANCE IMPROVEMENTS
 DIGITAL SPINDLE DRIVE TECHNOLOGY ADVANCEMENTS AND PERFORMANCE IMPROVEMENTS Ty Safreno and James Mello Trust Automation Inc. 143 Suburban Rd Building 100 San Luis Obispo, CA 93401 INTRODUCTION Industry
DIGITAL SPINDLE DRIVE TECHNOLOGY ADVANCEMENTS AND PERFORMANCE IMPROVEMENTS Ty Safreno and James Mello Trust Automation Inc. 143 Suburban Rd Building 100 San Luis Obispo, CA 93401 INTRODUCTION Industry
Chapter 10 Digital PID
 Chapter 10 Digital PID Chapter 10 Digital PID control Goals To show how PID control can be implemented in a digital computer program To deliver a template for a PID controller that you can implement yourself
Chapter 10 Digital PID Chapter 10 Digital PID control Goals To show how PID control can be implemented in a digital computer program To deliver a template for a PID controller that you can implement yourself
CS 393R. Lab Introduction. Todd Hester
 CS 393R Lab Introduction Todd Hester todd@cs.utexas.edu Outline The Lab: ENS 19N Website Software: Tekkotsu Robots: Aibo ERS-7 M3 Assignment 1 Lab Rules My information Office hours Wednesday 11-noon ENS
CS 393R Lab Introduction Todd Hester todd@cs.utexas.edu Outline The Lab: ENS 19N Website Software: Tekkotsu Robots: Aibo ERS-7 M3 Assignment 1 Lab Rules My information Office hours Wednesday 11-noon ENS
Testing Sensors & Actors Using Digital Oscilloscopes
 Testing Sensors & Actors Using Digital Oscilloscopes APPLICATION BRIEF February 14, 2012 Dr. Michael Lauterbach & Arthur Pini Summary Sensors and actors are used in a wide variety of electronic products
Testing Sensors & Actors Using Digital Oscilloscopes APPLICATION BRIEF February 14, 2012 Dr. Michael Lauterbach & Arthur Pini Summary Sensors and actors are used in a wide variety of electronic products
COS Lecture 1 Autonomous Robot Navigation
 COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
COS 495 - Lecture 1 Autonomous Robot Navigation Instructor: Chris Clark Semester: Fall 2011 1 Figures courtesy of Siegwart & Nourbakhsh Introduction Education B.Sc.Eng Engineering Phyics, Queen s University
Team Autono-Mo. Jacobia. Department of Computer Science and Engineering The University of Texas at Arlington
 Department of Computer Science and Engineering The University of Texas at Arlington Team Autono-Mo Jacobia Architecture Design Specification Team Members: Bill Butts Darius Salemizadeh Lance Storey Yunesh
Department of Computer Science and Engineering The University of Texas at Arlington Team Autono-Mo Jacobia Architecture Design Specification Team Members: Bill Butts Darius Salemizadeh Lance Storey Yunesh
MS Project :Trading Accuracy for Power with an Under-designed Multiplier Architecture Parag Kulkarni Adviser : Prof. Puneet Gupta Electrical Eng.
 MS Project :Trading Accuracy for Power with an Under-designed Multiplier Architecture Parag Kulkarni Adviser : Prof. Puneet Gupta Electrical Eng., UCLA - http://nanocad.ee.ucla.edu/ 1 Outline Introduction
MS Project :Trading Accuracy for Power with an Under-designed Multiplier Architecture Parag Kulkarni Adviser : Prof. Puneet Gupta Electrical Eng., UCLA - http://nanocad.ee.ucla.edu/ 1 Outline Introduction
Easy Robot Programming for Industrial Manipulators by Manual Volume Sweeping
 Easy Robot Programming for Industrial Manipulators by Manual Volume Sweeping *Yusuke MAEDA, Tatsuya USHIODA and Satoshi MAKITA (Yokohama National University) MAEDA Lab INTELLIGENT & INDUSTRIAL ROBOTICS
Easy Robot Programming for Industrial Manipulators by Manual Volume Sweeping *Yusuke MAEDA, Tatsuya USHIODA and Satoshi MAKITA (Yokohama National University) MAEDA Lab INTELLIGENT & INDUSTRIAL ROBOTICS
A Dynamically Reconfigurable ECG Analog Front-End with a 2.5 Data-Dependent Power Reduction
 A Dynamically Reconfigurable ECG Analog Front-End with a 2.5 Data-Dependent Power Reduction Somok Mondal 1, Chung-Lun Hsu 1, Roozbeh Jafari 2, Drew Hall 1 1 University of California, San Diego 2 Texas
A Dynamically Reconfigurable ECG Analog Front-End with a 2.5 Data-Dependent Power Reduction Somok Mondal 1, Chung-Lun Hsu 1, Roozbeh Jafari 2, Drew Hall 1 1 University of California, San Diego 2 Texas
ESB LOGISTICS LEARNING FACTORY. Prof. Dr. Ing. Dipl.-Ing. (FH) Vera Hummel, Dipl.-Ing (FH) Beate Brenner
 Vera Hummel, Dipl.-Ing (FH) Beate Brenner") International Academy for Production Engineering 7t th Conference on Learning Factories, Darmstadt, Germany, April 4 th to 5 th 2017 ESB LOGISTICS LEARNING FACTORY Digital twin as enabler for a SMART FACTORY
International Academy for Production Engineering 7t th Conference on Learning Factories, Darmstadt, Germany, April 4 th to 5 th 2017 ESB LOGISTICS LEARNING FACTORY Digital twin as enabler for a SMART FACTORY
KI-SUNG SUH USING NAO INTRODUCTION TO INTERACTIVE HUMANOID ROBOTS
 KI-SUNG SUH USING NAO INTRODUCTION TO INTERACTIVE HUMANOID ROBOTS 2 WORDS FROM THE AUTHOR Robots are both replacing and assisting people in various fields including manufacturing, extreme jobs, and service
KI-SUNG SUH USING NAO INTRODUCTION TO INTERACTIVE HUMANOID ROBOTS 2 WORDS FROM THE AUTHOR Robots are both replacing and assisting people in various fields including manufacturing, extreme jobs, and service
Design and function. How can technology make our lives easier? 1 d Technology helps us travel far. 2 It helps people keep in touch.
 Unit 1 Design and function How can technology make our lives easier? 1 How does technology help us? Match and write. Also think of your own ideas. 1 d Technology helps us travel far. 2 It helps people
Unit 1 Design and function How can technology make our lives easier? 1 How does technology help us? Match and write. Also think of your own ideas. 1 d Technology helps us travel far. 2 It helps people
UNIVERSAL PNEUMATIC TRANSDUCER FEATURES
 UNIVERSAL PNEUMATIC TRANSDUCER FEATURES Non-bleed device (no air consumption in steady state) 3-15 PSI adjustable. Internal accurate closed loop control Optional pressure feedback signal Jumper selectable
UNIVERSAL PNEUMATIC TRANSDUCER FEATURES Non-bleed device (no air consumption in steady state) 3-15 PSI adjustable. Internal accurate closed loop control Optional pressure feedback signal Jumper selectable
Mobile Target Tracking Using Radio Sensor Network
 Mobile Target Tracking Using Radio Sensor Network Nic Auth Grant Hovey Advisor: Dr. Suruz Miah Department of Electrical and Computer Engineering Bradley University 1501 W. Bradley Avenue Peoria, IL, 61625,
Mobile Target Tracking Using Radio Sensor Network Nic Auth Grant Hovey Advisor: Dr. Suruz Miah Department of Electrical and Computer Engineering Bradley University 1501 W. Bradley Avenue Peoria, IL, 61625,
Robot Task-Level Programming Language and Simulation
 Robot Task-Level Programming Language and Simulation M. Samaka Abstract This paper presents the development of a software application for Off-line robot task programming and simulation. Such application
Robot Task-Level Programming Language and Simulation M. Samaka Abstract This paper presents the development of a software application for Off-line robot task programming and simulation. Such application
Nautical Autonomous System with Task Integration (Code name)
") Nautical Autonomous System with Task Integration (Code name) NASTI 10/6/11 Team NASTI: Senior Students: Terry Max Christy, Jeremy Borgman Advisors: Nick Schmidt, Dr. Gary Dempsey Introduction The Nautical
Nautical Autonomous System with Task Integration (Code name) NASTI 10/6/11 Team NASTI: Senior Students: Terry Max Christy, Jeremy Borgman Advisors: Nick Schmidt, Dr. Gary Dempsey Introduction The Nautical
Run-time Power Control Scheme Using Software Feedback Loop for Low-Power Real-time Applications
 Run-time Power Control Scheme Using Software Feedback Loop for Low-Power Real-time Applications Seongsoo Lee Takayasu Sakurai Center for Collaborative Research and Institute of Industrial Science, University
Run-time Power Control Scheme Using Software Feedback Loop for Low-Power Real-time Applications Seongsoo Lee Takayasu Sakurai Center for Collaborative Research and Institute of Industrial Science, University
AI Application Processing Requirements
 AI Application Processing Requirements 1 Low Medium High Sensor analysis Activity Recognition (motion sensors) Stress Analysis or Attention Analysis Audio & sound Speech Recognition Object detection Computer
AI Application Processing Requirements 1 Low Medium High Sensor analysis Activity Recognition (motion sensors) Stress Analysis or Attention Analysis Audio & sound Speech Recognition Object detection Computer
Introduction to Arduino HW Labs
 Introduction to Arduino HW Labs In the next six lab sessions, you ll attach sensors and actuators to your Arduino processor This session provides an overview for the devices LED indicators Text/Sound Output
Introduction to Arduino HW Labs In the next six lab sessions, you ll attach sensors and actuators to your Arduino processor This session provides an overview for the devices LED indicators Text/Sound Output
Masatoshi Ishikawa, Akio Namiki, Takashi Komuro, and Idaku Ishii
 1ms Sensory-Motor Fusion System with Hierarchical Parallel Processing Architecture Masatoshi Ishikawa, Akio Namiki, Takashi Komuro, and Idaku Ishii Department of Mathematical Engineering and Information
1ms Sensory-Motor Fusion System with Hierarchical Parallel Processing Architecture Masatoshi Ishikawa, Akio Namiki, Takashi Komuro, and Idaku Ishii Department of Mathematical Engineering and Information
Advances in Antenna Measurement Instrumentation and Systems
 Advances in Antenna Measurement Instrumentation and Systems Steven R. Nichols, Roger Dygert, David Wayne MI Technologies Suwanee, Georgia, USA Abstract Since the early days of antenna pattern recorders,
Advances in Antenna Measurement Instrumentation and Systems Steven R. Nichols, Roger Dygert, David Wayne MI Technologies Suwanee, Georgia, USA Abstract Since the early days of antenna pattern recorders,
Intelligent Systems Design in a Non Engineering Curriculum. Embedded Systems Without Major Hardware Engineering
 Intelligent Systems Design in a Non Engineering Curriculum Embedded Systems Without Major Hardware Engineering Emily A. Brand Dept. of Computer Science Loyola University Chicago eabrand@gmail.com William
Intelligent Systems Design in a Non Engineering Curriculum Embedded Systems Without Major Hardware Engineering Emily A. Brand Dept. of Computer Science Loyola University Chicago eabrand@gmail.com William
Wide format scanning reformatted Small Light Easy to use Portable Self-contained
 Wide format scanning reformatted Small Light Easy to use Portable Self-contained Works like a digital camera. SmartLF Scan! comes complete with internal memory so you can scan anywhere. On the go You are
Wide format scanning reformatted Small Light Easy to use Portable Self-contained Works like a digital camera. SmartLF Scan! comes complete with internal memory so you can scan anywhere. On the go You are
Straight to the heart of innovation.
 1 2 3 4 5 Drafting concepts Straight to the heart of innovation. As easy as that. 1 Developing ideas Are you looking to build the best machine possible and already have some initial ideas? Then get these
1 2 3 4 5 Drafting concepts Straight to the heart of innovation. As easy as that. 1 Developing ideas Are you looking to build the best machine possible and already have some initial ideas? Then get these
Design Considerations for Wrist- Wearable Heart Rate Monitors
 Design Considerations for Wrist- Wearable Heart Rate Monitors Wrist-wearable fitness bands and smart watches are moving from basic accelerometer-based smart pedometers to include biometric sensing such
Design Considerations for Wrist- Wearable Heart Rate Monitors Wrist-wearable fitness bands and smart watches are moving from basic accelerometer-based smart pedometers to include biometric sensing such
Hardware in the Loop Simulation for Unmanned Aerial Vehicles
 NATIONAL 1 AEROSPACE LABORATORIES BANGALORE-560 017 INDIA CSIR-NAL Hardware in the Loop Simulation for Unmanned Aerial Vehicles Shikha Jain Kamali C Scientist, Flight Mechanics and Control Division National
NATIONAL 1 AEROSPACE LABORATORIES BANGALORE-560 017 INDIA CSIR-NAL Hardware in the Loop Simulation for Unmanned Aerial Vehicles Shikha Jain Kamali C Scientist, Flight Mechanics and Control Division National
Team Description for Humanoid KidSize League of RoboCup Stephen McGill, Seung Joon Yi, Yida Zhang, Aditya Sreekumar, and Professor Dan Lee
 Team DARwIn Team Description for Humanoid KidSize League of RoboCup 2013 Stephen McGill, Seung Joon Yi, Yida Zhang, Aditya Sreekumar, and Professor Dan Lee GRASP Lab School of Engineering and Applied Science,
Team DARwIn Team Description for Humanoid KidSize League of RoboCup 2013 Stephen McGill, Seung Joon Yi, Yida Zhang, Aditya Sreekumar, and Professor Dan Lee GRASP Lab School of Engineering and Applied Science,
CS123. Programming Your Personal Robot. Part 3: Reasoning Under Uncertainty
 CS123 Programming Your Personal Robot Part 3: Reasoning Under Uncertainty Topics For Part 3 3.1 The Robot Programming Problem What is robot programming Challenges Real World vs. Virtual World Mapping and
CS123 Programming Your Personal Robot Part 3: Reasoning Under Uncertainty Topics For Part 3 3.1 The Robot Programming Problem What is robot programming Challenges Real World vs. Virtual World Mapping and
Comparison of Simulation-Based Dynamic Traffic Assignment Approaches for Planning and Operations Management
 Comparison of Simulation-Based Dynamic Traffic Assignment Approaches for Planning and Operations Management Ramachandran Balakrishna Daniel Morgan Qi Yang Howard Slavin Caliper Corporation 4 th TRB Conference
Comparison of Simulation-Based Dynamic Traffic Assignment Approaches for Planning and Operations Management Ramachandran Balakrishna Daniel Morgan Qi Yang Howard Slavin Caliper Corporation 4 th TRB Conference
RUNNYMEDE COLLEGE & TECHTALENTS
 RUNNYMEDE COLLEGE & TECHTALENTS Why teach Scratch? The first programming language as a tool for writing programs. The MIT Media Lab's amazing software for learning to program, Scratch is a visual, drag
RUNNYMEDE COLLEGE & TECHTALENTS Why teach Scratch? The first programming language as a tool for writing programs. The MIT Media Lab's amazing software for learning to program, Scratch is a visual, drag
Digitalisation as day-to-day-business
 Digitalisation as day-to-day-business What is today feasible for the company in the future Prof. Jivka Ovtcharova INSTITUTE FOR INFORMATION MANAGEMENT IN ENGINEERING Baden-Württemberg Driving force for
Digitalisation as day-to-day-business What is today feasible for the company in the future Prof. Jivka Ovtcharova INSTITUTE FOR INFORMATION MANAGEMENT IN ENGINEERING Baden-Württemberg Driving force for
Safe Human-Robot Co-Existence
 Safe Human-Robot Co-Existence Aaron Pereira TU München February 3, 2016 Aaron Pereira Preliminary Lecture February 3, 2016 1 / 17 Overview Course Aim (Learning Outcomes) You understand the challenges behind
Safe Human-Robot Co-Existence Aaron Pereira TU München February 3, 2016 Aaron Pereira Preliminary Lecture February 3, 2016 1 / 17 Overview Course Aim (Learning Outcomes) You understand the challenges behind
Spring 19 Planning Techniques for Robotics Introduction; What is Planning for Robotics?
 16-350 Spring 19 Planning Techniques for Robotics Introduction; What is Planning for Robotics? Maxim Likhachev Robotics Institute Carnegie Mellon University About Me My Research Interests: - Planning,
16-350 Spring 19 Planning Techniques for Robotics Introduction; What is Planning for Robotics? Maxim Likhachev Robotics Institute Carnegie Mellon University About Me My Research Interests: - Planning,
The Cricket Indoor Location System
 The Cricket Indoor Location System Hari Balakrishnan Cricket Project MIT Computer Science and Artificial Intelligence Lab http://nms.csail.mit.edu/~hari http://cricket.csail.mit.edu Joint work with Bodhi
The Cricket Indoor Location System Hari Balakrishnan Cricket Project MIT Computer Science and Artificial Intelligence Lab http://nms.csail.mit.edu/~hari http://cricket.csail.mit.edu Joint work with Bodhi
Data Word Length Reduction for Low-Power DSP Software
 EE382C: LITERATURE SURVEY, APRIL 2, 2004 1 Data Word Length Reduction for Low-Power DSP Software Kyungtae Han Abstract The increasing demand for portable computing accelerates the study of minimizing power
EE382C: LITERATURE SURVEY, APRIL 2, 2004 1 Data Word Length Reduction for Low-Power DSP Software Kyungtae Han Abstract The increasing demand for portable computing accelerates the study of minimizing power
Enhancing Shipboard Maintenance with Augmented Reality
 Enhancing Shipboard Maintenance with Augmented Reality CACI Oxnard, CA Dennis Giannoni dgiannoni@caci.com (805) 288-6630 INFORMATION DEPLOYED. SOLUTIONS ADVANCED. MISSIONS ACCOMPLISHED. Agenda Virtual
Enhancing Shipboard Maintenance with Augmented Reality CACI Oxnard, CA Dennis Giannoni dgiannoni@caci.com (805) 288-6630 INFORMATION DEPLOYED. SOLUTIONS ADVANCED. MISSIONS ACCOMPLISHED. Agenda Virtual
University of Toronto. Companion Robot Security. ECE1778 Winter Wei Hao Chang Apper Alexander Hong Programmer
 University of Toronto Companion ECE1778 Winter 2015 Creative Applications for Mobile Devices Wei Hao Chang Apper Alexander Hong Programmer April 9, 2015 Contents 1 Introduction 3 1.1 Problem......................................
University of Toronto Companion ECE1778 Winter 2015 Creative Applications for Mobile Devices Wei Hao Chang Apper Alexander Hong Programmer April 9, 2015 Contents 1 Introduction 3 1.1 Problem......................................
The Real-Time Control System for Servomechanisms
 The Real-Time Control System for Servomechanisms PETR STODOLA, JAN MAZAL, IVANA MOKRÁ, MILAN PODHOREC Department of Military Management and Tactics University of Defence Kounicova str. 65, Brno CZECH REPUBLIC
The Real-Time Control System for Servomechanisms PETR STODOLA, JAN MAZAL, IVANA MOKRÁ, MILAN PODHOREC Department of Military Management and Tactics University of Defence Kounicova str. 65, Brno CZECH REPUBLIC
Behaviour Patterns Evolution on Individual and Group Level. Stanislav Slušný, Roman Neruda, Petra Vidnerová. CIMMACS 07, December 14, Tenerife
 Behaviour Patterns Evolution on Individual and Group Level Stanislav Slušný, Roman Neruda, Petra Vidnerová Department of Theoretical Computer Science Institute of Computer Science Academy of Science of
Behaviour Patterns Evolution on Individual and Group Level Stanislav Slušný, Roman Neruda, Petra Vidnerová Department of Theoretical Computer Science Institute of Computer Science Academy of Science of
Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators
 Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators Ahmed Okasha, Assistant Lecturer okasha1st@gmail.com Objective Have a
Mechatronics Engineering and Automation Faculty of Engineering, Ain Shams University MCT-151, Spring 2015 Lab-4: Electric Actuators Ahmed Okasha, Assistant Lecturer okasha1st@gmail.com Objective Have a
The safe & productive robot working without fences
 The European Robot Initiative for Strengthening the Competitiveness of SMEs in Manufacturing The safe & productive robot working without fences Final Presentation, Stuttgart, May 5 th, 2009 Objectives
The European Robot Initiative for Strengthening the Competitiveness of SMEs in Manufacturing The safe & productive robot working without fences Final Presentation, Stuttgart, May 5 th, 2009 Objectives
An Improved Path Planning Method Based on Artificial Potential Field for a Mobile Robot
 BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 15, No Sofia 015 Print ISSN: 1311-970; Online ISSN: 1314-4081 DOI: 10.1515/cait-015-0037 An Improved Path Planning Method Based
BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 15, No Sofia 015 Print ISSN: 1311-970; Online ISSN: 1314-4081 DOI: 10.1515/cait-015-0037 An Improved Path Planning Method Based
Why Humanoid Robots?*
 Why Humanoid Robots?* AJLONTECH * Largely adapted from Carlos Balaguer s talk in IURS 06 Outline Motivation What is a Humanoid Anyway? History of Humanoid Robots Why Develop Humanoids? Challenges in Humanoids
Why Humanoid Robots?* AJLONTECH * Largely adapted from Carlos Balaguer s talk in IURS 06 Outline Motivation What is a Humanoid Anyway? History of Humanoid Robots Why Develop Humanoids? Challenges in Humanoids
ARMY RDT&E BUDGET ITEM JUSTIFICATION (R2 Exhibit)
") Exhibit R-2 0602308A Advanced Concepts and Simulation ARMY RDT&E BUDGET ITEM JUSTIFICATION (R2 Exhibit) FY 2005 FY 2006 FY 2007 FY 2008 FY 2009 FY 2010 FY 2011 Total Program Element (PE) Cost 22710 27416
Exhibit R-2 0602308A Advanced Concepts and Simulation ARMY RDT&E BUDGET ITEM JUSTIFICATION (R2 Exhibit) FY 2005 FY 2006 FY 2007 FY 2008 FY 2009 FY 2010 FY 2011 Total Program Element (PE) Cost 22710 27416
Argos Ingegneria S.p.A. October 2009
 Argos Ingegneria S.p.A. October 2009 1 Photometric Measurement Systems SMF/M SMF/M General description SMF/M is the photometric measurement system for AGL equipment especially designed and developed by
Argos Ingegneria S.p.A. October 2009 1 Photometric Measurement Systems SMF/M SMF/M General description SMF/M is the photometric measurement system for AGL equipment especially designed and developed by
An Evidence Based Future for Buildings. The Living Lab.
 An Evidence Based Future for Buildings. The Living Lab. A N D R E W B U L L M O R E P A R T N E R, H O A R E L E A C I B S E T E C H N I C A L S Y M P O S I U M R E F 1 6 8 Contents. The story so far.
An Evidence Based Future for Buildings. The Living Lab. A N D R E W B U L L M O R E P A R T N E R, H O A R E L E A C I B S E T E C H N I C A L S Y M P O S I U M R E F 1 6 8 Contents. The story so far.
Closed-Loop Transportation Simulation. Outlines
 Closed-Loop Transportation Simulation Deyang Zhao Mentor: Unnati Ojha PI: Dr. Mo-Yuen Chow Aug. 4, 2010 Outlines 1 Project Backgrounds 2 Objectives 3 Hardware & Software 4 5 Conclusions 1 Project Background
Closed-Loop Transportation Simulation Deyang Zhao Mentor: Unnati Ojha PI: Dr. Mo-Yuen Chow Aug. 4, 2010 Outlines 1 Project Backgrounds 2 Objectives 3 Hardware & Software 4 5 Conclusions 1 Project Background
Adjustable Group Behavior of Agents in Action-based Games
 Adjustable Group Behavior of Agents in Action-d Games Westphal, Keith and Mclaughlan, Brian Kwestp2@uafortsmith.edu, brian.mclaughlan@uafs.edu Department of Computer and Information Sciences University
Adjustable Group Behavior of Agents in Action-d Games Westphal, Keith and Mclaughlan, Brian Kwestp2@uafortsmith.edu, brian.mclaughlan@uafs.edu Department of Computer and Information Sciences University
XIM Gen4 Sensor Programming Examples. Rev /05/2016
 XIM Gen Sensor Programming Examples Rev 0.6 2/0/206 Overview The latest XIM Gen firmware (V0.28), Xsensor firmware (V0.0) and XIM-BLE Control Panel (V..) update includes significant changes to sensor support.
XIM Gen Sensor Programming Examples Rev 0.6 2/0/206 Overview The latest XIM Gen firmware (V0.28), Xsensor firmware (V0.0) and XIM-BLE Control Panel (V..) update includes significant changes to sensor support.
Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization
 Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization Learning to avoid obstacles Outline Problem encoding using GA and ANN Floreano and Mondada
Swarm Intelligence W7: Application of Machine- Learning Techniques to Automatic Control Design and Optimization Learning to avoid obstacles Outline Problem encoding using GA and ANN Floreano and Mondada
Experiment 9 : Pulse Width Modulation
 Name/NetID: Experiment 9 : Pulse Width Modulation Laboratory Outline In experiment 5 we learned how to control the speed of a DC motor using a variable resistor. This week, we will learn an alternative
Name/NetID: Experiment 9 : Pulse Width Modulation Laboratory Outline In experiment 5 we learned how to control the speed of a DC motor using a variable resistor. This week, we will learn an alternative
Robotics Engineering DoDEA Career Technology Education Robot Programming
 Robotics Engineering DoDEA Career Technology Education Robot Programming Area Competency G. Robot Programming 1. Introduction to Robot Programming ( / / ) ( / / ) Before you get started, print out this
Robotics Engineering DoDEA Career Technology Education Robot Programming Area Competency G. Robot Programming 1. Introduction to Robot Programming ( / / ) ( / / ) Before you get started, print out this
Development of a Laboratory Kit for Robotics Engineering Education
 Development of a Laboratory Kit for Robotics Engineering Education Taskin Padir, William Michalson, Greg Fischer, Gary Pollice Worcester Polytechnic Institute Robotics Engineering Program tpadir@wpi.edu
Development of a Laboratory Kit for Robotics Engineering Education Taskin Padir, William Michalson, Greg Fischer, Gary Pollice Worcester Polytechnic Institute Robotics Engineering Program tpadir@wpi.edu
QuickBuilder PID Reference
 QuickBuilder PID Reference Doc. No. 951-530031-006 2010 Control Technology Corp. 25 South Street Hopkinton, MA 01748 Phone: 508.435.9595 Fax: 508.435.2373 Thursday, March 18, 2010 2 QuickBuilder PID Reference
QuickBuilder PID Reference Doc. No. 951-530031-006 2010 Control Technology Corp. 25 South Street Hopkinton, MA 01748 Phone: 508.435.9595 Fax: 508.435.2373 Thursday, March 18, 2010 2 QuickBuilder PID Reference
Robotics for Engineering Education
 Robotics for Engineering Education School of Engineering and Advanced Technology Massey University Dr. Loulin Huang RoboCup 2010 Symposium, Singapore, 25 June 2010 Outline Introduction some observation
Robotics for Engineering Education School of Engineering and Advanced Technology Massey University Dr. Loulin Huang RoboCup 2010 Symposium, Singapore, 25 June 2010 Outline Introduction some observation
Clock Steering Using Frequency Estimates from Stand-alone GPS Receiver Carrier Phase Observations
 Clock Steering Using Frequency Estimates from Stand-alone GPS Receiver Carrier Phase Observations Edward Byrne 1, Thao Q. Nguyen 2, Lars Boehnke 1, Frank van Graas 3, and Samuel Stein 1 1 Symmetricom Corporation,
Clock Steering Using Frequency Estimates from Stand-alone GPS Receiver Carrier Phase Observations Edward Byrne 1, Thao Q. Nguyen 2, Lars Boehnke 1, Frank van Graas 3, and Samuel Stein 1 1 Symmetricom Corporation,
Model-Based Design as an Enabler for Supply Chain Collaboration
 CO-DEVELOPMENT MANUFACTURING INNOVATION & SUPPORT Model-Based Design as an Enabler for Supply Chain Collaboration Richard Mijnheer, CEO, 3T Stephan van Beek, Technical Manager, MathWorks Richard Mijnheer
CO-DEVELOPMENT MANUFACTURING INNOVATION & SUPPORT Model-Based Design as an Enabler for Supply Chain Collaboration Richard Mijnheer, CEO, 3T Stephan van Beek, Technical Manager, MathWorks Richard Mijnheer
ANT Channel Search ABSTRACT
 ANT Channel Search ABSTRACT ANT channel search allows a device configured as a slave to find, and synchronize with, a specific master. This application note provides an overview of ANT channel establishment,
ANT Channel Search ABSTRACT ANT channel search allows a device configured as a slave to find, and synchronize with, a specific master. This application note provides an overview of ANT channel establishment,
LAB 5: Mobile robots -- Modeling, control and tracking
 LAB 5: Mobile robots -- Modeling, control and tracking Overview In this laboratory experiment, a wheeled mobile robot will be used to illustrate Modeling Independent speed control and steering Longitudinal
LAB 5: Mobile robots -- Modeling, control and tracking Overview In this laboratory experiment, a wheeled mobile robot will be used to illustrate Modeling Independent speed control and steering Longitudinal
Programming Design. ROBOTC Software
 Programming Design ROBOTC Software Behavior-Based Programming A behavior is anything your robot does Turning on a single motor or servo Three main types of behaviors 1. Complex behaviors Robot performs
Programming Design ROBOTC Software Behavior-Based Programming A behavior is anything your robot does Turning on a single motor or servo Three main types of behaviors 1. Complex behaviors Robot performs
Architecting Systems of the Future, page 1
 Architecting Systems of the Future featuring Eric Werner interviewed by Suzanne Miller ---------------------------------------------------------------------------------------------Suzanne Miller: Welcome
Architecting Systems of the Future featuring Eric Werner interviewed by Suzanne Miller ---------------------------------------------------------------------------------------------Suzanne Miller: Welcome
E11 Lecture 13: Feedback Control. Profs. David Money Harris & Sarah Harris Fall 2011
 E11 Lecture 13: Feedback Control Profs. David Money Harris & Sarah Harris Fall 2011 1 Coming Up in E11 This week s lab: line-following robot completed in teams (within same lab session) After fall break:
E11 Lecture 13: Feedback Control Profs. David Money Harris & Sarah Harris Fall 2011 1 Coming Up in E11 This week s lab: line-following robot completed in teams (within same lab session) After fall break:
An Integrated Modeling and Simulation Methodology for Intelligent Systems Design and Testing
 An Integrated ing and Simulation Methodology for Intelligent Systems Design and Testing Xiaolin Hu and Bernard P. Zeigler Arizona Center for Integrative ing and Simulation The University of Arizona Tucson,
An Integrated ing and Simulation Methodology for Intelligent Systems Design and Testing Xiaolin Hu and Bernard P. Zeigler Arizona Center for Integrative ing and Simulation The University of Arizona Tucson,
Fall 17 Planning & Decision-making in Robotics Introduction; What is Planning, Role of Planning in Robots
 16-782 Fall 17 Planning & Decision-making in Robotics Introduction; What is Planning, Role of Planning in Robots Maxim Likhachev Robotics Institute Carnegie Mellon University Class Logistics Instructor:
16-782 Fall 17 Planning & Decision-making in Robotics Introduction; What is Planning, Role of Planning in Robots Maxim Likhachev Robotics Institute Carnegie Mellon University Class Logistics Instructor:
CS123. Programming Your Personal Robot. Part 3: Reasoning Under Uncertainty
 CS123 Programming Your Personal Robot Part 3: Reasoning Under Uncertainty This Week (Week 2 of Part 3) Part 3-3 Basic Introduction of Motion Planning Several Common Motion Planning Methods Plan Execution
CS123 Programming Your Personal Robot Part 3: Reasoning Under Uncertainty This Week (Week 2 of Part 3) Part 3-3 Basic Introduction of Motion Planning Several Common Motion Planning Methods Plan Execution
Artificial Neural Network based Mobile Robot Navigation
 Artificial Neural Network based Mobile Robot Navigation István Engedy Budapest University of Technology and Economics, Department of Measurement and Information Systems, Magyar tudósok körútja 2. H-1117,
Artificial Neural Network based Mobile Robot Navigation István Engedy Budapest University of Technology and Economics, Department of Measurement and Information Systems, Magyar tudósok körútja 2. H-1117,
Robot Autonomy Project Auto Painting. Team: Ben Ballard Jimit Gandhi Mohak Bhardwaj Pratik Chatrath
 Robot Autonomy Project Auto Painting Team: Ben Ballard Jimit Gandhi Mohak Bhardwaj Pratik Chatrath Goal -Get HERB to paint autonomously Overview Initial Setup of Environment Problems to Solve Paintings:HERB,
Robot Autonomy Project Auto Painting Team: Ben Ballard Jimit Gandhi Mohak Bhardwaj Pratik Chatrath Goal -Get HERB to paint autonomously Overview Initial Setup of Environment Problems to Solve Paintings:HERB,
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Line Detection. Duration Minutes. Di culty Intermediate. Learning Objectives Students will:
 Line Detection Design ways to improve driving safety by helping to prevent drivers from falling asleep and causing an accident. Learning Objectives Students will: Explore the concept of the Loop Understand
Line Detection Design ways to improve driving safety by helping to prevent drivers from falling asleep and causing an accident. Learning Objectives Students will: Explore the concept of the Loop Understand
FORCE FEEDBACK. Roope Raisamo
 FORCE FEEDBACK Roope Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere, Finland Outline Force feedback interfaces
FORCE FEEDBACK Roope Raisamo Multimodal Interaction Research Group Tampere Unit for Computer Human Interaction Department of Computer Sciences University of Tampere, Finland Outline Force feedback interfaces
2. Introduction to Computer Haptics
 2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
2. Introduction to Computer Haptics Seungmoon Choi, Ph.D. Assistant Professor Dept. of Computer Science and Engineering POSTECH Outline Basics of Force-Feedback Haptic Interfaces Introduction to Computer
A simple embedded stereoscopic vision system for an autonomous rover
 In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 A simple embedded stereoscopic vision
In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 A simple embedded stereoscopic vision
, TECHNOLOGY. SAULT COLLEGE OF APPLIED ARTS SAULT STE. MARIE, ONTARIO COURSE OUTLINE COURSE OUTLINE: ROBOTIC & CONTROL SYSTEMS
 SAULT COLLEGE OF APPLIED ARTS, TECHNOLOGY SAULT STE. MARIE, ONTARIO COURSE OUTLINE COURSE OUTLINE: CODE NO.: ELN228-5 PROGRAM: ELECTRICAL/ELECTRONIC TECHNICIAN SEMESTER: FOUR DATE: JANUARY 1991 AUTHOR:
SAULT COLLEGE OF APPLIED ARTS, TECHNOLOGY SAULT STE. MARIE, ONTARIO COURSE OUTLINE COURSE OUTLINE: CODE NO.: ELN228-5 PROGRAM: ELECTRICAL/ELECTRONIC TECHNICIAN SEMESTER: FOUR DATE: JANUARY 1991 AUTHOR:
Lab Manual. Experiment FREQUENCY SWEEP. Created by Hong-Van Tran
 Lab Manual Experiment FREQUENCY SWEEP Created by Hong-Van Tran Lab of Electromechanical Energy Department of Precision Engineering. National Chung Hsing University April 19, 2018 CONTENTS DESCRIBE... pape
Lab Manual Experiment FREQUENCY SWEEP Created by Hong-Van Tran Lab of Electromechanical Energy Department of Precision Engineering. National Chung Hsing University April 19, 2018 CONTENTS DESCRIBE... pape
FP7 ICT Call 6: Cognitive Systems and Robotics
 FP7 ICT Call 6: Cognitive Systems and Robotics Information day Luxembourg, January 14, 2010 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media
FP7 ICT Call 6: Cognitive Systems and Robotics Information day Luxembourg, January 14, 2010 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media
Symposium: Urban Energy innovation
 Symposium: Urban Energy innovation Smart Monitoring, Management & Control Referent: Simone Baldi (3mE, TU Delft) Co-Referent: Wilbert Prinssen (Technolution) Chair: Laure Itard (BK, TU Delft) 30 May, 2018
Symposium: Urban Energy innovation Smart Monitoring, Management & Control Referent: Simone Baldi (3mE, TU Delft) Co-Referent: Wilbert Prinssen (Technolution) Chair: Laure Itard (BK, TU Delft) 30 May, 2018
RAPID CONTROL PROTOTYPING FOR ELECTRIC DRIVES
 RAPID CONTROL PROTOTYPING FOR ELECTRIC DRIVES Lukáš Pohl Doctoral Degree Programme (2), FEEC BUT E-mail: xpohll01@stud.feec.vutbr.cz Supervised by: Petr Blaha E-mail: blahap@feec.vutbr.cz Abstract: This
RAPID CONTROL PROTOTYPING FOR ELECTRIC DRIVES Lukáš Pohl Doctoral Degree Programme (2), FEEC BUT E-mail: xpohll01@stud.feec.vutbr.cz Supervised by: Petr Blaha E-mail: blahap@feec.vutbr.cz Abstract: This
Development of Hybrid Flight Simulator with Multi Degree-of-Freedom Robot
 Development of Hybrid Flight Simulator with Multi Degree-of-Freedom Robot Kakizaki Kohei, Nakajima Ryota, Tsukabe Naoki Department of Aerospace Engineering Department of Mechanical System Design Engineering
Development of Hybrid Flight Simulator with Multi Degree-of-Freedom Robot Kakizaki Kohei, Nakajima Ryota, Tsukabe Naoki Department of Aerospace Engineering Department of Mechanical System Design Engineering
Push Path Improvement with Policy based Reinforcement Learning
 1 Push Path Improvement with Policy based Reinforcement Learning Junhu He TAMS Department of Informatics University of Hamburg Cross-modal Interaction In Natural and Artificial Cognitive Systems (CINACS)
1 Push Path Improvement with Policy based Reinforcement Learning Junhu He TAMS Department of Informatics University of Hamburg Cross-modal Interaction In Natural and Artificial Cognitive Systems (CINACS)