Virtual Worlds for the Perception and Control of Self-Driving Vehicles
|
|
|
- Kelly Summers
- 6 years ago
- Views:
Transcription

1 Virtual Worlds for the Perception and Control of Self-Driving Vehicles Dr. Antonio M. López
2 Index Context SYNTHIA: CVPR 16 SYNTHIA: Reloaded SYNTHIA: Evolutions CARLA Conclusions
3 Index Context SYNTHIA: CVPR 16 SYNTHIA: Reloaded SYNTHIA: Evolutions CARLA Conclusions
4 Our Mission as CVC/UAB group 4 Forming students (undergraduate, master and PhD) in the fields of Computer Vision, Machine Learning, and Artificial Intelligence for Autonomous Systems, in particular, Cars. Basic Research producing high impact papers in top-level conferences and Q1 journals. Technological transfer & Innovation developing prototypes, demonstrators and products jointly with the industry. Dissemination doing an effort to bring our research and its applications to the general public. antonio@cvc.uab.es //

5 // 5





6 Research: ML for Vision 6 I m bored, let s labelling data for fun! antonio@cvc.uab.es //

7 // 7
8 Index Context SYNTHIA: CVPR 16 SYNTHIA: Reloaded SYNTHIA: Evolutions CARLA Conclusions

9 // 9

10 // 10




11 // 11

12 // 12


13 Semantic segmentation results The SYNTHIA Dataset: A Large Collection of Synthetic Images for Semantic Segmentation of Urban Scenes, G Ros, L. Sellart, J. Materzynska, D. Vázquez, A.M. López, CVPR antonio@cvc.uab.es //
, instance ID We simulated different weather and illumination conditions, as well as four seasons We simulated a camera setting for covering 360º")
14 Data Publicly Released at 14 Image generator to acquire thousands of data with several kinds of ground truth. RGB & Per pixel: depth, semantic class (CamVid), instance ID We simulated different weather and illumination conditions, as well as four seasons We simulated a camera setting for covering 360º >300,000 images with their ground truth available antonio@cvc.uab.es //




15 DPM to assess Photo-Realism 15 vehicle detection SYNTHIA GTA-V //

16 Back to DPM to assess Photo-Realism: 16 vehicle detection From Virtual to Real World Visual Perception using Domain Adaptation -- The DPM as Example, A.M. López, J. Xu, J.L. Gómez, D. Vázquez, G. Ros, arxiv: To appear in Domain Adaptation in Computer Vision Applications, Springer Series: Advances in Computer Vision and Pattern Recognition, Edited by Gabriela Csurka //

17 // 17


18 Change Detection 18 //

19 Summary of the Research 19 //
20 Index Context SYNTHIA: CVPR 16 SYNTHIA: Reloaded SYNTHIA: Evolutions CARLA Conclusions

21 // 21

22 // 22

23 // 23

24 // 24

25 // 25

26 // 26

27 // 27





28 Best Industrial Paper at BMVC slope horizon Stereo + Horizon Line + Road Slope Stereo Images Semantic Stixels Semantic segmentation antonio@cvc.uab.es //



29 Original Stixels 29 Slanted Stixels New dataset: SYNTHIA-San Francisco publicly available soon //
30 Index Context SYNTHIA: CVPR 16 SYNTHIA: Reloaded SYNTHIA: Evolutions CARLA Conclusions

31 // 31


32 Adding 360º LIDAR with Semantics 32 //

33 // 33

34 Image-to-Image Domain Adaptation: case study on traffic sign recognition Assumptions: 34 1) Real world: missing classes 2) Virtual world: easy to generate samples of any class Real world data Proposal: Virtual world data We want: A new real-world classifier that takes into account the missing classes, but with minimum annotation effort. 1) Train a deep network that knows to transform the virtual images to look like the real ones, using only the intersection classes for training this network. 2) Use the virtual world to generate many examples of the missing classes. 3) Transform the virtual samples according to the learned network. Known classes 4) Train the real-world classifier using the real-world samples (of previous classes) and the transformed samples (of new classes). antonio@cvc.uab.es // New classes
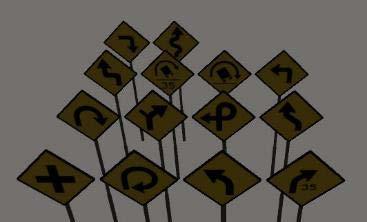
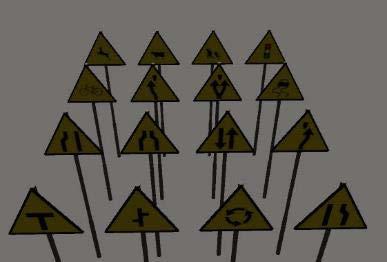
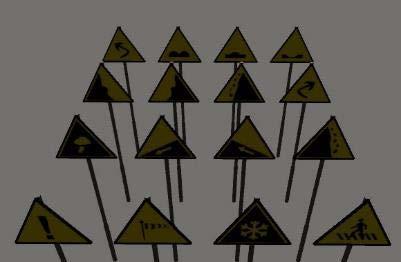
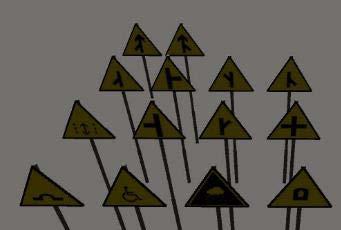

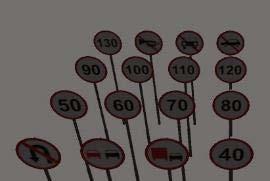



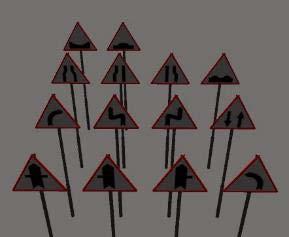
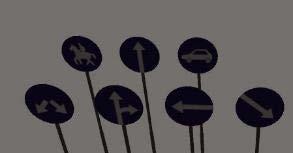



35 Image-to-Image Domain Adaptation: case study on traffic sign recognition Traffic signs types (the ones of Tsinghua dataset). ~ images generated per day. We force variability: light, background, viewpoint, etc. It is simple to add new traffic signs types. antonio@cvc.uab.es //

36 // 36


37 Image-to-Image Domain Adaptation: case study on traffic sign recognition 37 S T S T Known Classes S T S T antonio@cvc.uab.es //


38 Image-to-Image Domain Adaptation: case study on traffic sign recognition 38 New Classes //



39 Physics-based Rendering in SYNTHIA 39 //


40 Video Analytics towards Vision Zero Project City of Bellevue, Washington, USA 40 Video Analytics towards Vision Zero, Franz Loewenherz, Victor Bahl, Yinhai Wang, ITE Journal, Vol. 87, n. 3, March Keys: Analytics at intersections. Training of neural networks required. Crowdsourcing of volunteers for collecting ground truth data. Unity & CVC/UAB Rendered data //

41 // 41

42 // 42

43 // 43

44 Augmented Reality 44 //


45 Augmented Reality 45 //

46 Augmented Reality 46 //


47 Augmented Reality 47 //

48 Index Context SYNTHIA: CVPR 16 SYNTHIA: Reloaded SYNTHIA: Evolutions CARLA Conclusions
49 49 More photo-realism and ground truth: New datasets Vision Zero project //






50 50 More photo-realism and ground truth: New datasets Vision Zero project Car Learning to Act: Interactive simulator Open-source spirit //



51 51 Server Physic simulations Rendering Ground truth Privileged information Client Data recording Environment settings control Vehicle control AI //
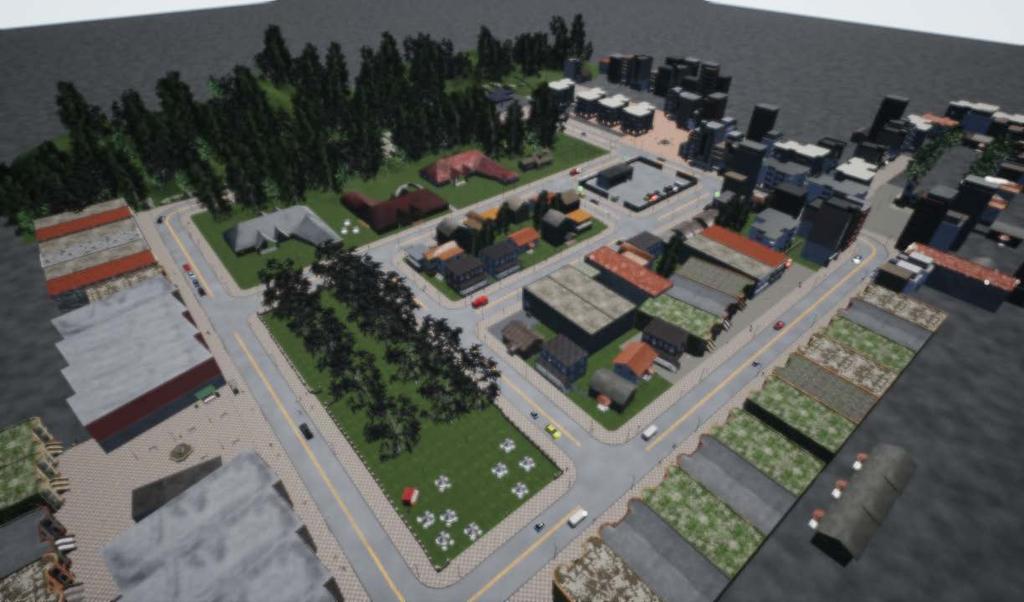
52 52 Features So far two towns from the scratch Different weather/daytime conditions Sets of cameras attached to the vehicle Depth, semantic classes, 3D bounding boxes Speed, traffic infractions, collisions Synch / Asynch modes Based on own assets or free available ones We will open source our C++ code Publicly available soon antonio@cvc.uab.es //



53 // 53




54 // 54
 Modular pipeline; (2) Imitation learning; (3)")
55 55 We compare: (1) Modular pipeline; (2) Imitation learning; (3) Reinforcement learning //

56 56 Conditional Imitation Learning //

57 // 57

58 // 58
59 Index Context SYNTHIA: CVPR 16 SYNTHIA: Reloaded SYNTHIA: Evolutions CARLA Conclusions
60 60 Simulation of perception and control methods are essential for designing, training and testing AI drivers; both datasets and interactive simulations are key, as SYNTHIA and CARLA. Virtual- to real-world domain adaptation is an essential topic, both for pure perception and for sensorimotor models. SYNTHIA: generating more photorealistic datasets and eventually training deep networks to control the parameters of the image generation (render and composition, augmented reality). CARLA: add more sensors and content, as well as external interaction models. //

61 Many thanks for attending!!! Many thanks to the many people of the CVC/UAB that has been contributing to this work, especially to Jose A., Felipe, Marc, Fran, Xisco, Néstor, Fran2, Alberto, Iris, Mario, Ignazio, Juan, Daniel, Laura, Juan Carlos, Toni, David, etc. etc. As well as to people from different companies I cannot name (confidentiality), and others I can name: Vladlen, Alexey, Germán, JoseD, Diana, Renaldas, Uwe, David, Dough, etc. etc.
Machine Learning for Intelligent Transportation Systems
 Machine Learning for Intelligent Transportation Systems Patrick Emami (CISE), Anand Rangarajan (CISE), Sanjay Ranka (CISE), Lily Elefteriadou (CE) MALT Lab, UFTI September 6, 2018 ITS - A Broad Perspective
Machine Learning for Intelligent Transportation Systems Patrick Emami (CISE), Anand Rangarajan (CISE), Sanjay Ranka (CISE), Lily Elefteriadou (CE) MALT Lab, UFTI September 6, 2018 ITS - A Broad Perspective
Autonomous driving made safe
 tm Autonomous driving made safe Founder, Bio Celite Milbrandt Austin, Texas since 1998 Founder of Slacker Radio In dash for Tesla, GM, and Ford. 35M active users 2008 Chief Product Officer of RideScout
tm Autonomous driving made safe Founder, Bio Celite Milbrandt Austin, Texas since 1998 Founder of Slacker Radio In dash for Tesla, GM, and Ford. 35M active users 2008 Chief Product Officer of RideScout
EVALUATION OF A TRAFFIC SIGN DETECTOR BY SYNTHETIC IMAGE DATA FOR ADVANCED DRIVER ASSISTANCE SYSTEMS
 The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume XLII-2, 2018 ISPRS TC II Mid-term Symposium Towards Photogrammetry 2020, 4 June 2018, Riva del
The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume XLII-2, 2018 ISPRS TC II Mid-term Symposium Towards Photogrammetry 2020, 4 June 2018, Riva del
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS. Sergii Bykov Technical Lead Machine Learning 12 Oct 2017
 23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
Domain Adaptation & Transfer: All You Need to Use Simulation for Real
 Domain Adaptation & Transfer: All You Need to Use Simulation for Real Boqing Gong Tecent AI Lab Department of Computer Science An intelligent robot Semantic segmentation of urban scenes Assign each pixel
Domain Adaptation & Transfer: All You Need to Use Simulation for Real Boqing Gong Tecent AI Lab Department of Computer Science An intelligent robot Semantic segmentation of urban scenes Assign each pixel
The Virtues of Virtual Reality Artur Filipowicz and Nayan Bhat Princeton University May 18th, 2017
 The Virtues of Virtual Reality Artur Filipowicz and Nayan Bhat Princeton University May 18th, 2017 Uses for Virtual Reality in SmartDrivingCars Train - Develop new algorithms and software Test - Individual
The Virtues of Virtual Reality Artur Filipowicz and Nayan Bhat Princeton University May 18th, 2017 Uses for Virtual Reality in SmartDrivingCars Train - Develop new algorithms and software Test - Individual
arxiv: v1 [cs.lg] 10 Nov 2017
![arxiv: v1 [cs.lg] 10 Nov 2017](/thumbs/74/70632711.jpg "arxiv: v1 [cs.lg] 10 Nov 2017") CARLA: An Open Urban Driving Simulator Alexey Dosovitskiy 1, German Ros 2,3, Felipe Codevilla 1,3, Antonio López 3, and Vladlen Koltun 1 1 Intel Labs 2 Toyota Research Institute 3 Computer Vision Center,
CARLA: An Open Urban Driving Simulator Alexey Dosovitskiy 1, German Ros 2,3, Felipe Codevilla 1,3, Antonio López 3, and Vladlen Koltun 1 1 Intel Labs 2 Toyota Research Institute 3 Computer Vision Center,
Spring 2018 CS543 / ECE549 Computer Vision. Course webpage URL:
 Spring 2018 CS543 / ECE549 Computer Vision Course webpage URL: http://slazebni.cs.illinois.edu/spring18/ The goal of computer vision To extract meaning from pixels What we see What a computer sees Source:
Spring 2018 CS543 / ECE549 Computer Vision Course webpage URL: http://slazebni.cs.illinois.edu/spring18/ The goal of computer vision To extract meaning from pixels What we see What a computer sees Source:
Digital image processing vs. computer vision Higher-level anchoring
 Digital image processing vs. computer vision Higher-level anchoring Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception
Digital image processing vs. computer vision Higher-level anchoring Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering, Department of Cybernetics Center for Machine Perception
CS 131 Lecture 1: Course introduction
 CS 131 Lecture 1: Course introduction Olivier Moindrot Department of Computer Science Stanford University Stanford, CA 94305 olivierm@stanford.edu 1 What is computer vision? 1.1 Definition Two definitions
CS 131 Lecture 1: Course introduction Olivier Moindrot Department of Computer Science Stanford University Stanford, CA 94305 olivierm@stanford.edu 1 What is computer vision? 1.1 Definition Two definitions
ADAS Development using Advanced Real-Time All-in-the-Loop Simulators. Roberto De Vecchi VI-grade Enrico Busto - AddFor
 ADAS Development using Advanced Real-Time All-in-the-Loop Simulators Roberto De Vecchi VI-grade Enrico Busto - AddFor The Scenario The introduction of ADAS and AV has created completely new challenges
ADAS Development using Advanced Real-Time All-in-the-Loop Simulators Roberto De Vecchi VI-grade Enrico Busto - AddFor The Scenario The introduction of ADAS and AV has created completely new challenges
Physics Based Sensor simulation
 Physics Based Sensor simulation Jordan Gorrochotegui - Product Manager Software and Services Mike Phillips Software Engineer Restricted Siemens AG 2017 Realize innovation. Siemens offers solutions across
Physics Based Sensor simulation Jordan Gorrochotegui - Product Manager Software and Services Mike Phillips Software Engineer Restricted Siemens AG 2017 Realize innovation. Siemens offers solutions across
VSI Labs The Build Up of Automated Driving
 VSI Labs The Build Up of Automated Driving October - 2017 Agenda Opening Remarks Introduction and Background Customers Solutions VSI Labs Some Industry Content Opening Remarks Automated vehicle systems
VSI Labs The Build Up of Automated Driving October - 2017 Agenda Opening Remarks Introduction and Background Customers Solutions VSI Labs Some Industry Content Opening Remarks Automated vehicle systems
12th AUGUST WORKSHOP COMPUTER GRAPHICS FOR AUTONOMOUS DRIVING APPLICATIONS EXTENDED PROGRAM
 WORKSHOP EXTENDED PROGRAM COMPUTERGRAPHICSFORAUTONOMOUSDRIVINGAPPLICATIONS 8:45h 10:30h 11:00h 12:30h 13:30h 14:05h 14:25h 15:00h 15:30h 16:05h 16:25h 17:00h 9:00h 9:35h 10:10h 11:35h 11:55h JoseDeOliveira(UnityTech.)
WORKSHOP EXTENDED PROGRAM COMPUTERGRAPHICSFORAUTONOMOUSDRIVINGAPPLICATIONS 8:45h 10:30h 11:00h 12:30h 13:30h 14:05h 14:25h 15:00h 15:30h 16:05h 16:25h 17:00h 9:00h 9:35h 10:10h 11:35h 11:55h JoseDeOliveira(UnityTech.)
Roles of Artificial Intelligence and Machine Learning in Future Mobility
 Roles of Artificial Intelligence and Machine Learning in Future Mobility Huang Guangbin Professor of School of Electrical and Electronic Engineering Nanyang Technological University, Singapore ITU/IMDA
Roles of Artificial Intelligence and Machine Learning in Future Mobility Huang Guangbin Professor of School of Electrical and Electronic Engineering Nanyang Technological University, Singapore ITU/IMDA
Semantic Segmentation on Resource Constrained Devices
 Semantic Segmentation on Resource Constrained Devices Sachin Mehta University of Washington, Seattle In collaboration with Mohammad Rastegari, Anat Caspi, Linda Shapiro, and Hannaneh Hajishirzi Project
Semantic Segmentation on Resource Constrained Devices Sachin Mehta University of Washington, Seattle In collaboration with Mohammad Rastegari, Anat Caspi, Linda Shapiro, and Hannaneh Hajishirzi Project
Choosing the Optimum Mix of Sensors for Driver Assistance and Autonomous Vehicles
 Choosing the Optimum Mix of Sensors for Driver Assistance and Autonomous Vehicles Ali Osman Ors May 2, 2017 Copyright 2017 NXP Semiconductors 1 Sensing Technology Comparison Rating: H = High, M=Medium,
Choosing the Optimum Mix of Sensors for Driver Assistance and Autonomous Vehicles Ali Osman Ors May 2, 2017 Copyright 2017 NXP Semiconductors 1 Sensing Technology Comparison Rating: H = High, M=Medium,
Lecture 1 Introduction to Computer Vision. Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2015
 Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2015 Course Info Contact Information Room 314, Jishi Building Email: cslinzhang@tongji.edu.cn
Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2015 Course Info Contact Information Room 314, Jishi Building Email: cslinzhang@tongji.edu.cn
Computer vision, wearable computing and the future of transportation
 Computer vision, wearable computing and the future of transportation Amnon Shashua Hebrew University, Mobileye, OrCam 1 Computer Vision that will Change Transportation Amnon Shashua Mobileye 2 Computer
Computer vision, wearable computing and the future of transportation Amnon Shashua Hebrew University, Mobileye, OrCam 1 Computer Vision that will Change Transportation Amnon Shashua Mobileye 2 Computer
Service Robots in an Intelligent House
 Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
The 3xD Simulator for Intelligent Vehicles Professor Paul Jennings. 20 th October 2016
 The 3xD Simulator for Intelligent Vehicles Professor Paul Jennings 20 th October 2016 An academic department within the science faculty Established in 1980 by Professor Lord Bhattacharyya as Warwick Manufacturing
The 3xD Simulator for Intelligent Vehicles Professor Paul Jennings 20 th October 2016 An academic department within the science faculty Established in 1980 by Professor Lord Bhattacharyya as Warwick Manufacturing
OPEN CV BASED AUTONOMOUS RC-CAR
 OPEN CV BASED AUTONOMOUS RC-CAR B. Sabitha 1, K. Akila 2, S.Krishna Kumar 3, D.Mohan 4, P.Nisanth 5 1,2 Faculty, Department of Mechatronics Engineering, Kumaraguru College of Technology, Coimbatore, India
OPEN CV BASED AUTONOMOUS RC-CAR B. Sabitha 1, K. Akila 2, S.Krishna Kumar 3, D.Mohan 4, P.Nisanth 5 1,2 Faculty, Department of Mechatronics Engineering, Kumaraguru College of Technology, Coimbatore, India
Today I t n d ro ucti tion to computer vision Course overview Course requirements
 COMP 776: Computer Vision Today Introduction ti to computer vision i Course overview Course requirements The goal of computer vision To extract t meaning from pixels What we see What a computer sees Source:
COMP 776: Computer Vision Today Introduction ti to computer vision i Course overview Course requirements The goal of computer vision To extract t meaning from pixels What we see What a computer sees Source:
Lecture 7: Scene Text Detection and Recognition. Dr. Cong Yao Megvii (Face++) Researcher
 Researcher") Lecture 7: Scene Text Detection and Recognition Dr. Cong Yao Megvii (Face++) Researcher yaocong@megvii.com Outline Background and Introduction Conventional Methods Deep Learning Methods Datasets and Competitions
Lecture 7: Scene Text Detection and Recognition Dr. Cong Yao Megvii (Face++) Researcher yaocong@megvii.com Outline Background and Introduction Conventional Methods Deep Learning Methods Datasets and Competitions
Data-Starved Artificial Intelligence
 Data-Starved Artificial Intelligence Data-Starved Artificial Intelligence This material is based upon work supported by the Assistant Secretary of Defense for Research and Engineering under Air Force Contract
Data-Starved Artificial Intelligence Data-Starved Artificial Intelligence This material is based upon work supported by the Assistant Secretary of Defense for Research and Engineering under Air Force Contract
WHO. 6 staff people. Tel: / Fax: Website: vision.unipv.it
 It has been active in the Department of Electrical, Computer and Biomedical Engineering of the University of Pavia since the early 70s. The group s initial research activities concentrated on image enhancement
It has been active in the Department of Electrical, Computer and Biomedical Engineering of the University of Pavia since the early 70s. The group s initial research activities concentrated on image enhancement
A.I in Automotive? Why and When.
 A.I in Automotive? Why and When. AGENDA 01 02 03 04 Definitions A.I? A.I in automotive Now? Next big A.I breakthrough in Automotive 01 DEFINITIONS DEFINITIONS Artificial Intelligence Artificial Intelligence:
A.I in Automotive? Why and When. AGENDA 01 02 03 04 Definitions A.I? A.I in automotive Now? Next big A.I breakthrough in Automotive 01 DEFINITIONS DEFINITIONS Artificial Intelligence Artificial Intelligence:
Automatic understanding of the visual world
 Automatic understanding of the visual world 1 Machine visual perception Artificial capacity to see, understand the visual world Object recognition Image or sequence of images Action recognition 2 Machine
Automatic understanding of the visual world 1 Machine visual perception Artificial capacity to see, understand the visual world Object recognition Image or sequence of images Action recognition 2 Machine
Derek Allman a, Austin Reiter b, and Muyinatu Bell a,c
 Exploring the effects of transducer models when training convolutional neural networks to eliminate reflection artifacts in experimental photoacoustic images Derek Allman a, Austin Reiter b, and Muyinatu
Exploring the effects of transducer models when training convolutional neural networks to eliminate reflection artifacts in experimental photoacoustic images Derek Allman a, Austin Reiter b, and Muyinatu
Value-added Applications with Deep Learning. src:
 SMART TOURISM Value-added Applications with Deep Learning src: https://www.wttc.org/-/media/files/reports/economic-impact-research/countries-2017/thailand2017.pdf Somnuk Phon-Amnuaisuk, Minh-Son Dao, CIE,
SMART TOURISM Value-added Applications with Deep Learning src: https://www.wttc.org/-/media/files/reports/economic-impact-research/countries-2017/thailand2017.pdf Somnuk Phon-Amnuaisuk, Minh-Son Dao, CIE,
Mobile Cognitive Indoor Assistive Navigation for the Visually Impaired
 1 Mobile Cognitive Indoor Assistive Navigation for the Visually Impaired Bing Li 1, Manjekar Budhai 2, Bowen Xiao 3, Liang Yang 1, Jizhong Xiao 1 1 Department of Electrical Engineering, The City College,
1 Mobile Cognitive Indoor Assistive Navigation for the Visually Impaired Bing Li 1, Manjekar Budhai 2, Bowen Xiao 3, Liang Yang 1, Jizhong Xiao 1 1 Department of Electrical Engineering, The City College,
Autonomous Mobile Robot Design. Dr. Kostas Alexis (CSE)
") Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
Autonomous Mobile Robot Design Dr. Kostas Alexis (CSE) Course Goals To introduce students into the holistic design of autonomous robots - from the mechatronic design to sensors and intelligence. Develop
Intelligent Driving Agents
 Intelligent Driving Agents The agent approach to tactical driving in autonomous vehicles and traffic simulation Presentation Master s thesis Patrick Ehlert January 29 th, 2001 Imagine. Sensors Actuators
Intelligent Driving Agents The agent approach to tactical driving in autonomous vehicles and traffic simulation Presentation Master s thesis Patrick Ehlert January 29 th, 2001 Imagine. Sensors Actuators
Driving Using End-to-End Deep Learning
 Driving Using End-to-End Deep Learning Farzain Majeed farza@knights.ucf.edu Kishan Athrey kishan.athrey@knights.ucf.edu Dr. Mubarak Shah shah@crcv.ucf.edu Abstract This work explores the problem of autonomously
Driving Using End-to-End Deep Learning Farzain Majeed farza@knights.ucf.edu Kishan Athrey kishan.athrey@knights.ucf.edu Dr. Mubarak Shah shah@crcv.ucf.edu Abstract This work explores the problem of autonomously
P1.4. Light has to go where it is needed: Future Light Based Driver Assistance Systems
 Light has to go where it is needed: Future Light Based Driver Assistance Systems Thomas Könning¹, Christian Amsel¹, Ingo Hoffmann² ¹ Hella KGaA Hueck & Co., Lippstadt, Germany ² Hella-Aglaia Mobile Vision
Light has to go where it is needed: Future Light Based Driver Assistance Systems Thomas Könning¹, Christian Amsel¹, Ingo Hoffmann² ¹ Hella KGaA Hueck & Co., Lippstadt, Germany ² Hella-Aglaia Mobile Vision
ADAS COMPUTER VISION AND AUGMENTED REALITY SOLUTION
 ENGINEERING ENERGY TELECOM TRAVEL AND AVIATION SOFTWARE FINANCIAL SERVICES ADAS COMPUTER VISION AND AUGMENTED REALITY SOLUTION Sergii Bykov, Technical Lead TECHNOLOGY AUTOMOTIVE Product Vision Road To
ENGINEERING ENERGY TELECOM TRAVEL AND AVIATION SOFTWARE FINANCIAL SERVICES ADAS COMPUTER VISION AND AUGMENTED REALITY SOLUTION Sergii Bykov, Technical Lead TECHNOLOGY AUTOMOTIVE Product Vision Road To
HeroX - Untethered VR Training in Sync'ed Physical Spaces
 Page 1 of 6 HeroX - Untethered VR Training in Sync'ed Physical Spaces Above and Beyond - Integrating Robotics In previous research work I experimented with multiple robots remotely controlled by people
Page 1 of 6 HeroX - Untethered VR Training in Sync'ed Physical Spaces Above and Beyond - Integrating Robotics In previous research work I experimented with multiple robots remotely controlled by people
Topic identification through sentiment analysis
 Progetti di Sistemi Intelligenti Alberto Borghese Università degli Studi di Milano Laboratorio di Sistemi Intelligenti Applicati (AIS-Lab) Dipartimento di Informatica alberto.borghese@unimi.it 1/16 Topic
Progetti di Sistemi Intelligenti Alberto Borghese Università degli Studi di Milano Laboratorio di Sistemi Intelligenti Applicati (AIS-Lab) Dipartimento di Informatica alberto.borghese@unimi.it 1/16 Topic
EMPOWERING THE CONNECTED FIELD FORCE WORKER WITH ADVANCED ANALYTICS MATTHEW SHORT ACCENTURE LABS
 EMPOWERING THE CONNECTED FIELD FORCE WORKER WITH ADVANCED ANALYTICS MATTHEW SHORT ACCENTURE LABS ACCENTURE LABS DUBLIN Artificial Intelligence Security SILICON VALLEY Digital Experiences Artificial Intelligence
EMPOWERING THE CONNECTED FIELD FORCE WORKER WITH ADVANCED ANALYTICS MATTHEW SHORT ACCENTURE LABS ACCENTURE LABS DUBLIN Artificial Intelligence Security SILICON VALLEY Digital Experiences Artificial Intelligence
Industrial Keynotes. 06/09/2018 Juan-Les-Pins
 Industrial Keynotes 1 06/09/2018 Juan-Les-Pins Agenda 1. The End of Driving Simulation? 2. Autonomous Vehicles: the new UI 3. Augmented Realities 4. Choose your factions 5. No genuine AI without flawless
Industrial Keynotes 1 06/09/2018 Juan-Les-Pins Agenda 1. The End of Driving Simulation? 2. Autonomous Vehicles: the new UI 3. Augmented Realities 4. Choose your factions 5. No genuine AI without flawless
Intelligent Technology for More Advanced Autonomous Driving
 FEATURED ARTICLES Autonomous Driving Technology for Connected Cars Intelligent Technology for More Advanced Autonomous Driving Autonomous driving is recognized as an important technology for dealing with
FEATURED ARTICLES Autonomous Driving Technology for Connected Cars Intelligent Technology for More Advanced Autonomous Driving Autonomous driving is recognized as an important technology for dealing with
Improving Robustness of Semantic Segmentation Models with Style Normalization
 Improving Robustness of Semantic Segmentation Models with Style Normalization Evani Radiya-Dixit Department of Computer Science Stanford University evanir@stanford.edu Andrew Tierno Department of Computer
Improving Robustness of Semantic Segmentation Models with Style Normalization Evani Radiya-Dixit Department of Computer Science Stanford University evanir@stanford.edu Andrew Tierno Department of Computer
Automotive Applications ofartificial Intelligence
 Bitte decken Sie die schraffierte Fläche mit einem Bild ab. Please cover the shaded area with a picture. (24,4 x 7,6 cm) Automotive Applications ofartificial Intelligence Dr. David J. Atkinson Chassis
Bitte decken Sie die schraffierte Fläche mit einem Bild ab. Please cover the shaded area with a picture. (24,4 x 7,6 cm) Automotive Applications ofartificial Intelligence Dr. David J. Atkinson Chassis
Wildlife Census via LSH-based animal tracking APOORV PATWARDHAN
 1 Wildlife Census via LSH-based animal tracking APOORV PATWARDHAN National Parks and wildlife conservation 2 Jim Corbett National Park, India Amboseli National Park, Kenya And many more The Challenge 3
1 Wildlife Census via LSH-based animal tracking APOORV PATWARDHAN National Parks and wildlife conservation 2 Jim Corbett National Park, India Amboseli National Park, Kenya And many more The Challenge 3
Wadehra Kartik, Kathpalia Mukul, Bahl Vasudha, International Journal of Advance Research, Ideas and Innovations in Technology
 ISSN: 2454-132X Impact factor: 4.295 (Volume 4, Issue 1) Available online at www.ijariit.com Hand Detection and Gesture Recognition in Real-Time Using Haar-Classification and Convolutional Neural Networks
ISSN: 2454-132X Impact factor: 4.295 (Volume 4, Issue 1) Available online at www.ijariit.com Hand Detection and Gesture Recognition in Real-Time Using Haar-Classification and Convolutional Neural Networks
Artificial Intelligence Machine learning and Deep Learning: Trends and Tools. Dr. Shaona
 Artificial Intelligence Machine learning and Deep Learning: Trends and Tools Dr. Shaona Ghosh @shaonaghosh What is Machine Learning? Computer algorithms that learn patterns in data automatically from large
Artificial Intelligence Machine learning and Deep Learning: Trends and Tools Dr. Shaona Ghosh @shaonaghosh What is Machine Learning? Computer algorithms that learn patterns in data automatically from large
A NEW NEUROMORPHIC STRATEGY FOR THE FUTURE OF VISION FOR MACHINES June Xavier Lagorce Head of Computer Vision & Systems
 A NEW NEUROMORPHIC STRATEGY FOR THE FUTURE OF VISION FOR MACHINES June 2017 Xavier Lagorce Head of Computer Vision & Systems Imagine meeting the promise of Restoring sight to the blind Accident-free autonomous
A NEW NEUROMORPHIC STRATEGY FOR THE FUTURE OF VISION FOR MACHINES June 2017 Xavier Lagorce Head of Computer Vision & Systems Imagine meeting the promise of Restoring sight to the blind Accident-free autonomous
THE FUTURE OF AUTOMOTIVE - AUGMENTED REALITY VERSUS AUTONOMOUS VEHICLES
 The 14 International Conference RELIABILITY and STATISTICS in TRANSPORTATION and COMMUNICATION 2014 Proceedings of the 14th International Conference Reliability and Statistics in Transportation and Communication
The 14 International Conference RELIABILITY and STATISTICS in TRANSPORTATION and COMMUNICATION 2014 Proceedings of the 14th International Conference Reliability and Statistics in Transportation and Communication
Introduction. Visual data acquisition devices. The goal of computer vision. The goal of computer vision. Vision as measurement device
 Spring 15 CIS 5543 Computer Vision Visual data acquisition devices Introduction Haibin Ling http://www.dabi.temple.edu/~hbling/teaching/15s_5543/index.html Revised from S. Lazebnik The goal of computer
Spring 15 CIS 5543 Computer Vision Visual data acquisition devices Introduction Haibin Ling http://www.dabi.temple.edu/~hbling/teaching/15s_5543/index.html Revised from S. Lazebnik The goal of computer
Colorful Image Colorizations Supplementary Material
 Colorful Image Colorizations Supplementary Material Richard Zhang, Phillip Isola, Alexei A. Efros {rich.zhang, isola, efros}@eecs.berkeley.edu University of California, Berkeley 1 Overview This document
Colorful Image Colorizations Supplementary Material Richard Zhang, Phillip Isola, Alexei A. Efros {rich.zhang, isola, efros}@eecs.berkeley.edu University of California, Berkeley 1 Overview This document
Robust Positioning for Urban Traffic
 Robust Positioning for Urban Traffic Motivations and Activity plan for the WG 4.1.4 Dr. Laura Ruotsalainen Research Manager, Department of Navigation and positioning Finnish Geospatial Research Institute
Robust Positioning for Urban Traffic Motivations and Activity plan for the WG 4.1.4 Dr. Laura Ruotsalainen Research Manager, Department of Navigation and positioning Finnish Geospatial Research Institute
Light-Field Database Creation and Depth Estimation
 Light-Field Database Creation and Depth Estimation Abhilash Sunder Raj abhisr@stanford.edu Michael Lowney mlowney@stanford.edu Raj Shah shahraj@stanford.edu Abstract Light-field imaging research has been
Light-Field Database Creation and Depth Estimation Abhilash Sunder Raj abhisr@stanford.edu Michael Lowney mlowney@stanford.edu Raj Shah shahraj@stanford.edu Abstract Light-field imaging research has been
Joint Open Lab and PHD proposal
 GRUPPO TELECOM ITALIA Joint Open Lab and PHD proposal Politecnico di Torino Aprile 2015 Joint Open Lab : Project at a glance Joint Open Labs are research and innovation laboratories set up within university
GRUPPO TELECOM ITALIA Joint Open Lab and PHD proposal Politecnico di Torino Aprile 2015 Joint Open Lab : Project at a glance Joint Open Labs are research and innovation laboratories set up within university
Perception platform and fusion modules results. Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event
 Perception platform and fusion modules results Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event 20 th -21 st November 2013 Agenda Introduction Environment Perception in Intelligent Transport
Perception platform and fusion modules results Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event 20 th -21 st November 2013 Agenda Introduction Environment Perception in Intelligent Transport
Demystifying Machine Learning
 Demystifying Machine Learning By Simon Agius Muscat Software Engineer with RightBrain PyMalta, 19/07/18 http://www.rightbrain.com.mt 0. Talk outline 1. Explain the reasoning behind my talk 2. Defining
Demystifying Machine Learning By Simon Agius Muscat Software Engineer with RightBrain PyMalta, 19/07/18 http://www.rightbrain.com.mt 0. Talk outline 1. Explain the reasoning behind my talk 2. Defining
Human-Centric Trusted AI for Data-Driven Economy
 Human-Centric Trusted AI for Data-Driven Economy Masugi Inoue 1 and Hideyuki Tokuda 2 National Institute of Information and Communications Technology inoue@nict.go.jp 1, Director, International Research
Human-Centric Trusted AI for Data-Driven Economy Masugi Inoue 1 and Hideyuki Tokuda 2 National Institute of Information and Communications Technology inoue@nict.go.jp 1, Director, International Research
CAPACITIES FOR TECHNOLOGY TRANSFER
 CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
Kinect Interface for UC-win/Road: Application to Tele-operation of Small Robots
 Kinect Interface for UC-win/Road: Application to Tele-operation of Small Robots Hafid NINISS Forum8 - Robot Development Team Abstract: The purpose of this work is to develop a man-machine interface for
Kinect Interface for UC-win/Road: Application to Tele-operation of Small Robots Hafid NINISS Forum8 - Robot Development Team Abstract: The purpose of this work is to develop a man-machine interface for
CS6700: The Emergence of Intelligent Machines. Prof. Carla Gomes Prof. Bart Selman Cornell University
 EMERGENCE OF INTELLIGENT MACHINES: CHALLENGES AND OPPORTUNITIES CS6700: The Emergence of Intelligent Machines Prof. Carla Gomes Prof. Bart Selman Cornell University Artificial Intelligence After a distinguished
EMERGENCE OF INTELLIGENT MACHINES: CHALLENGES AND OPPORTUNITIES CS6700: The Emergence of Intelligent Machines Prof. Carla Gomes Prof. Bart Selman Cornell University Artificial Intelligence After a distinguished
Lecture 1 Introduction to Computer Vision. Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2018
 Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2018 Course Info Contact Information Room 408L, Jishi Building Email: cslinzhang@tongji.edu.cn
Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2018 Course Info Contact Information Room 408L, Jishi Building Email: cslinzhang@tongji.edu.cn
SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results
 SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results Angelos Amditis (ICCS) and Lali Ghosh (DEL) 18 th October 2013 20 th ITS World
SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results Angelos Amditis (ICCS) and Lali Ghosh (DEL) 18 th October 2013 20 th ITS World
Transer Learning : Super Intelligence
 Transer Learning : Super Intelligence GIS Group Dr Narayan Panigrahi, MA Rajesh, Shibumon Alampatta, Rakesh K P of Centre for AI and Robotics, Defence Research and Development Organization, C V Raman Nagar,
Transer Learning : Super Intelligence GIS Group Dr Narayan Panigrahi, MA Rajesh, Shibumon Alampatta, Rakesh K P of Centre for AI and Robotics, Defence Research and Development Organization, C V Raman Nagar,
Addressing the Uncertainties in Autonomous Driving
 Addressing the Uncertainties in Autonomous Driving Jane Macfarlane and Matei Stroila HERE (a) Lidar misalignment challenges for a simple street scene (b) Fleet based accident detection Figure 1: Map Uncertainties
Addressing the Uncertainties in Autonomous Driving Jane Macfarlane and Matei Stroila HERE (a) Lidar misalignment challenges for a simple street scene (b) Fleet based accident detection Figure 1: Map Uncertainties
DeCAF: A Deep Convolutional Activation Feature for Generic Visual Recognition. ECE 289G: Paper Presentation #3 Philipp Gysel
 DeCAF: A Deep Convolutional Activation Feature for Generic Visual Recognition ECE 289G: Paper Presentation #3 Philipp Gysel Autonomous Car ECE 289G Paper Presentation, Philipp Gysel Slide 2 Source: maps.google.com
DeCAF: A Deep Convolutional Activation Feature for Generic Visual Recognition ECE 289G: Paper Presentation #3 Philipp Gysel Autonomous Car ECE 289G Paper Presentation, Philipp Gysel Slide 2 Source: maps.google.com
THE VISIONLAB TEAM engineers - 1 physicist. Feasibility study and prototyping Hardware benchmarking Open and closed source libraries
 VISIONLAB OPENING THE VISIONLAB TEAM 2018 6 engineers - 1 physicist Feasibility study and prototyping Hardware benchmarking Open and closed source libraries Deep learning frameworks GPU frameworks FPGA
VISIONLAB OPENING THE VISIONLAB TEAM 2018 6 engineers - 1 physicist Feasibility study and prototyping Hardware benchmarking Open and closed source libraries Deep learning frameworks GPU frameworks FPGA
interactive IP: Perception platform and modules
 interactive IP: Perception platform and modules Angelos Amditis, ICCS 19 th ITS-WC-SIS76: Advanced integrated safety applications based on enhanced perception, active interventions and new advanced sensors
interactive IP: Perception platform and modules Angelos Amditis, ICCS 19 th ITS-WC-SIS76: Advanced integrated safety applications based on enhanced perception, active interventions and new advanced sensors
Unlock the power of location. Gjermund Jakobsen ITS Konferansen 2017
 Unlock the power of location Gjermund Jakobsen ITS Konferansen 2017 50B 200 Countries mapped HERE in numbers Our world in numbers 7,000+ Employees in 56 countries focused on delivering the world s best
Unlock the power of location Gjermund Jakobsen ITS Konferansen 2017 50B 200 Countries mapped HERE in numbers Our world in numbers 7,000+ Employees in 56 countries focused on delivering the world s best
David Howarth. Business Development Manager Americas
 David Howarth Business Development Manager Americas David Howarth IPG Automotive USA, Inc. Business Development Manager Americas david.howarth@ipg-automotive.com ni.com Testing Automated Driving Functions
David Howarth Business Development Manager Americas David Howarth IPG Automotive USA, Inc. Business Development Manager Americas david.howarth@ipg-automotive.com ni.com Testing Automated Driving Functions
March 10, Greenbelt Road, Suite 400, Greenbelt, MD Tel: (301) Fax: (301)
 Fax: (301)") Detection of High Risk Intersections Using Synthetic Machine Vision John Alesse, john.alesse.ctr@dot.gov Brian O Donnell, brian.odonnell.ctr@dot.gov Stinger Ghaffarian Technologies, Inc. Cambridge, Massachusetts
Detection of High Risk Intersections Using Synthetic Machine Vision John Alesse, john.alesse.ctr@dot.gov Brian O Donnell, brian.odonnell.ctr@dot.gov Stinger Ghaffarian Technologies, Inc. Cambridge, Massachusetts
CSE Tue 10/09. Nadir Weibel
 CSE 118 - Tue 10/09 Nadir Weibel Today Admin Teams Assignments, grading, submissions Mini Quiz on Week 1 (readings and class material) Low-Fidelity Prototyping 1st Project Assignment Computer Vision, Kinect,
CSE 118 - Tue 10/09 Nadir Weibel Today Admin Teams Assignments, grading, submissions Mini Quiz on Week 1 (readings and class material) Low-Fidelity Prototyping 1st Project Assignment Computer Vision, Kinect,
Virtual Environments and Game AI
 Virtual Environments and Game AI Dr Michael Papasimeon Guest Lecture Graphics and Interaction 9 August 2016 Introduction Introduction So what is this lecture all about? In general... Where Artificial Intelligence
Virtual Environments and Game AI Dr Michael Papasimeon Guest Lecture Graphics and Interaction 9 August 2016 Introduction Introduction So what is this lecture all about? In general... Where Artificial Intelligence
CS343 Introduction to Artificial Intelligence Spring 2010
 CS343 Introduction to Artificial Intelligence Spring 2010 Prof: TA: Daniel Urieli Department of Computer Science The University of Texas at Austin Good Afternoon, Colleagues Welcome to a fun, but challenging
CS343 Introduction to Artificial Intelligence Spring 2010 Prof: TA: Daniel Urieli Department of Computer Science The University of Texas at Austin Good Afternoon, Colleagues Welcome to a fun, but challenging
Virtual Testing of Autonomous Vehicles
 Virtual Testing of Autonomous Vehicles Mike Dempsey Claytex Services Limited Software, Consultancy, Training Based in Leamington Spa, UK Office in Cape Town, South Africa Experts in Systems Engineering,
Virtual Testing of Autonomous Vehicles Mike Dempsey Claytex Services Limited Software, Consultancy, Training Based in Leamington Spa, UK Office in Cape Town, South Africa Experts in Systems Engineering,
Transformation to Artificial Intelligence with MATLAB Roy Lurie, PhD Vice President of Engineering MATLAB Products
 Transformation to Artificial Intelligence with MATLAB Roy Lurie, PhD Vice President of Engineering MATLAB Products 2018 The MathWorks, Inc. 1 A brief history of the automobile First Commercial Gas Car
Transformation to Artificial Intelligence with MATLAB Roy Lurie, PhD Vice President of Engineering MATLAB Products 2018 The MathWorks, Inc. 1 A brief history of the automobile First Commercial Gas Car
Embedding Artificial Intelligence into Our Lives
 Embedding Artificial Intelligence into Our Lives Michael Thompson, Synopsys D&R IP-SOC DAYS Santa Clara April 2018 1 Agenda Introduction What AI is and is Not Where AI is being used Rapid Advance of AI
Embedding Artificial Intelligence into Our Lives Michael Thompson, Synopsys D&R IP-SOC DAYS Santa Clara April 2018 1 Agenda Introduction What AI is and is Not Where AI is being used Rapid Advance of AI
Following Dirt Roads at Night-Time
 Following Dirt Roads at Night-Time Sensors and Features for Lane Recognition and Tracking Sebastian F. X. Bayerl Thorsten Luettel Hans-Joachim Wuensche Autonomous Systems Technology (TAS) Department of
Following Dirt Roads at Night-Time Sensors and Features for Lane Recognition and Tracking Sebastian F. X. Bayerl Thorsten Luettel Hans-Joachim Wuensche Autonomous Systems Technology (TAS) Department of
Automatic Licenses Plate Recognition System
 Automatic Licenses Plate Recognition System Garima R. Yadav Dept. of Electronics & Comm. Engineering Marathwada Institute of Technology, Aurangabad (Maharashtra), India yadavgarima08@gmail.com Prof. H.K.
Automatic Licenses Plate Recognition System Garima R. Yadav Dept. of Electronics & Comm. Engineering Marathwada Institute of Technology, Aurangabad (Maharashtra), India yadavgarima08@gmail.com Prof. H.K.
Analysis and retrieval of events/actions and workflows in video streams
 Multimed Tools Appl (2010) 50:1 6 DOI 10.1007/s11042-010-0514-2 GUEST EDITORIAL Analysis and retrieval of events/actions and workflows in video streams Anastasios D. Doulamis & Luc van Gool & Mark Nixon
Multimed Tools Appl (2010) 50:1 6 DOI 10.1007/s11042-010-0514-2 GUEST EDITORIAL Analysis and retrieval of events/actions and workflows in video streams Anastasios D. Doulamis & Luc van Gool & Mark Nixon
Jurnal TICOM Vol.1 No.1 September 2012 ISSN
 Self Driving Car: Artificial Intelligence Approach Ronal Chandra* 1, Nazori Agani* 2, Yoga Prihastomo* 3 *Postgraduate Program, Master of Computer Science, University of Budi Luhur Jl. Raya Ciledug, Jakarta
Self Driving Car: Artificial Intelligence Approach Ronal Chandra* 1, Nazori Agani* 2, Yoga Prihastomo* 3 *Postgraduate Program, Master of Computer Science, University of Budi Luhur Jl. Raya Ciledug, Jakarta
The next level of intelligence: Artificial Intelligence. Innovation Day USA 2017 Princeton, March 27, 2017 Michael May, Siemens Corporate Technology
 The next level of intelligence: Artificial Intelligence Innovation Day USA 2017 Princeton, March 27, 2017, Siemens Corporate Technology siemens.com/innovationusa Notes and forward-looking statements This
The next level of intelligence: Artificial Intelligence Innovation Day USA 2017 Princeton, March 27, 2017, Siemens Corporate Technology siemens.com/innovationusa Notes and forward-looking statements This
Author s Name Name of the Paper Session. DYNAMIC POSITIONING CONFERENCE October 10-11, 2017 SENSORS SESSION. Sensing Autonomy.
 Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 10-11, 2017 SENSORS SESSION Sensing Autonomy By Arne Rinnan Kongsberg Seatex AS Abstract A certain level of autonomy is already
Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 10-11, 2017 SENSORS SESSION Sensing Autonomy By Arne Rinnan Kongsberg Seatex AS Abstract A certain level of autonomy is already
Lecture 23 Deep Learning: Segmentation
 Lecture 23 Deep Learning: Segmentation COS 429: Computer Vision Thanks: most of these slides shamelessly adapted from Stanford CS231n: Convolutional Neural Networks for Visual Recognition Fei-Fei Li, Andrej
Lecture 23 Deep Learning: Segmentation COS 429: Computer Vision Thanks: most of these slides shamelessly adapted from Stanford CS231n: Convolutional Neural Networks for Visual Recognition Fei-Fei Li, Andrej
CS343 Introduction to Artificial Intelligence Spring 2012
 CS343 Introduction to Artificial Intelligence Spring 2012 Prof: TA: Daniel Urieli Department of Computer Science The University of Texas at Austin Good Afternoon, Colleagues Welcome to a fun, but challenging
CS343 Introduction to Artificial Intelligence Spring 2012 Prof: TA: Daniel Urieli Department of Computer Science The University of Texas at Austin Good Afternoon, Colleagues Welcome to a fun, but challenging
Evaluation of Connected Vehicle Technology for Concept Proposal Using V2X Testbed
 AUTOMOTIVE Evaluation of Connected Vehicle Technology for Concept Proposal Using V2X Testbed Yoshiaki HAYASHI*, Izumi MEMEZAWA, Takuji KANTOU, Shingo OHASHI, and Koichi TAKAYAMA ----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
AUTOMOTIVE Evaluation of Connected Vehicle Technology for Concept Proposal Using V2X Testbed Yoshiaki HAYASHI*, Izumi MEMEZAWA, Takuji KANTOU, Shingo OHASHI, and Koichi TAKAYAMA ----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
Lecture 1 Introduction to Computer Vision. Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2014
 Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2014 Course Info Contact Information Room 314, Jishi Building Email: cslinzhang@tongji.edu.cn
Lecture 1 Introduction to Computer Vision Lin ZHANG, PhD School of Software Engineering, Tongji University Spring 2014 Course Info Contact Information Room 314, Jishi Building Email: cslinzhang@tongji.edu.cn
Autonomous Driving with a Simulation Trained Convolutional Neural Network
 University of the Pacific Scholarly Commons University of the Pacific Theses and Dissertations Graduate School 2017 Autonomous Driving with a Simulation Trained Convolutional Neural Network Cameron Franke
University of the Pacific Scholarly Commons University of the Pacific Theses and Dissertations Graduate School 2017 Autonomous Driving with a Simulation Trained Convolutional Neural Network Cameron Franke
Intelligent Traffic Sign Detector: Adaptive Learning Based on Online Gathering of Training Samples
 2011 IEEE Intelligent Vehicles Symposium (IV) Baden-Baden, Germany, June 5-9, 2011 Intelligent Traffic Sign Detector: Adaptive Learning Based on Online Gathering of Training Samples Daisuke Deguchi, Mitsunori
2011 IEEE Intelligent Vehicles Symposium (IV) Baden-Baden, Germany, June 5-9, 2011 Intelligent Traffic Sign Detector: Adaptive Learning Based on Online Gathering of Training Samples Daisuke Deguchi, Mitsunori
The Denali-MC HDR ISP Backgrounder
 The Denali-MC HDR ISP Backgrounder 2-4 brackets up to 8 EV frame offset Up to 16 EV stops for output HDR LATM (tone map) up to 24 EV Noise reduction due to merging of 10 EV LDR to a single 16 EV HDR up
The Denali-MC HDR ISP Backgrounder 2-4 brackets up to 8 EV frame offset Up to 16 EV stops for output HDR LATM (tone map) up to 24 EV Noise reduction due to merging of 10 EV LDR to a single 16 EV HDR up
Continuous Gesture Recognition Fact Sheet
 Continuous Gesture Recognition Fact Sheet August 17, 2016 1 Team details Team name: ICT NHCI Team leader name: Xiujuan Chai Team leader address, phone number and email Address: No.6 Kexueyuan South Road
Continuous Gesture Recognition Fact Sheet August 17, 2016 1 Team details Team name: ICT NHCI Team leader name: Xiujuan Chai Team leader address, phone number and email Address: No.6 Kexueyuan South Road
Event-based Algorithms for Robust and High-speed Robotics
 Event-based Algorithms for Robust and High-speed Robotics Davide Scaramuzza All my research on event-based vision is summarized on this page: http://rpg.ifi.uzh.ch/research_dvs.html Davide Scaramuzza University
Event-based Algorithms for Robust and High-speed Robotics Davide Scaramuzza All my research on event-based vision is summarized on this page: http://rpg.ifi.uzh.ch/research_dvs.html Davide Scaramuzza University
Visualization of Vehicular Traffic in Augmented Reality for Improved Planning and Analysis of Road Construction Projects
 NSF GRANT # 0448762 NSF PROGRAM NAME: CMMI/CIS Visualization of Vehicular Traffic in Augmented Reality for Improved Planning and Analysis of Road Construction Projects Amir H. Behzadan City University
NSF GRANT # 0448762 NSF PROGRAM NAME: CMMI/CIS Visualization of Vehicular Traffic in Augmented Reality for Improved Planning and Analysis of Road Construction Projects Amir H. Behzadan City University
Semantic Localization of Indoor Places. Lukas Kuster
 Semantic Localization of Indoor Places Lukas Kuster Motivation GPS for localization [7] 2 Motivation Indoor navigation [8] 3 Motivation Crowd sensing [9] 4 Motivation Targeted Advertisement [10] 5 Motivation
Semantic Localization of Indoor Places Lukas Kuster Motivation GPS for localization [7] 2 Motivation Indoor navigation [8] 3 Motivation Crowd sensing [9] 4 Motivation Targeted Advertisement [10] 5 Motivation
ARGUING THE SAFETY OF MACHINE LEARNING FOR HIGHLY AUTOMATED DRIVING USING ASSURANCE CASES LYDIA GAUERHOF BOSCH CORPORATE RESEARCH
 ARGUING THE SAFETY OF MACHINE LEARNING FOR HIGHLY AUTOMATED DRIVING USING ASSURANCE CASES 14.12.2017 LYDIA GAUERHOF BOSCH CORPORATE RESEARCH Arguing Safety of Machine Learning for Highly Automated Driving
ARGUING THE SAFETY OF MACHINE LEARNING FOR HIGHLY AUTOMATED DRIVING USING ASSURANCE CASES 14.12.2017 LYDIA GAUERHOF BOSCH CORPORATE RESEARCH Arguing Safety of Machine Learning for Highly Automated Driving
TECHNOLOGY DEVELOPMENT AREAS IN AAWA
 TECHNOLOGY DEVELOPMENT AREAS IN AAWA Technologies for realizing remote and autonomous ships exist. The task is to find the optimum way to combine them reliably and cost effecticely. Ship state definition
TECHNOLOGY DEVELOPMENT AREAS IN AAWA Technologies for realizing remote and autonomous ships exist. The task is to find the optimum way to combine them reliably and cost effecticely. Ship state definition
IRI-UPC Internship Programme 2019
 The Institut de Robòtica i Informàtica Industrial, CSIC-UPC, offers 3 grants addressed to UPC Master or undergraduate students to carry out a research internship in our centre. This programme is under
The Institut de Robòtica i Informàtica Industrial, CSIC-UPC, offers 3 grants addressed to UPC Master or undergraduate students to carry out a research internship in our centre. This programme is under
A Winning Combination
 A Winning Combination Risk factors Statements in this presentation that refer to future plans and expectations are forward-looking statements that involve a number of risks and uncertainties. Words such
A Winning Combination Risk factors Statements in this presentation that refer to future plans and expectations are forward-looking statements that involve a number of risks and uncertainties. Words such
FLASH LiDAR KEY BENEFITS
 In 2013, 1.2 million people died in vehicle accidents. That is one death every 25 seconds. Some of these lives could have been saved with vehicles that have a better understanding of the world around them
In 2013, 1.2 million people died in vehicle accidents. That is one death every 25 seconds. Some of these lives could have been saved with vehicles that have a better understanding of the world around them
Vision-based User-interfaces for Pervasive Computing. CHI 2003 Tutorial Notes. Trevor Darrell Vision Interface Group MIT AI Lab
 Vision-based User-interfaces for Pervasive Computing Tutorial Notes Vision Interface Group MIT AI Lab Table of contents Biographical sketch..ii Agenda..iii Objectives.. iv Abstract..v Introduction....1
Vision-based User-interfaces for Pervasive Computing Tutorial Notes Vision Interface Group MIT AI Lab Table of contents Biographical sketch..ii Agenda..iii Objectives.. iv Abstract..v Introduction....1
INTELLIGENT UNMANNED GROUND VEHICLES Autonomous Navigation Research at Carnegie Mellon
 INTELLIGENT UNMANNED GROUND VEHICLES Autonomous Navigation Research at Carnegie Mellon THE KLUWER INTERNATIONAL SERIES IN ENGINEERING AND COMPUTER SCIENCE ROBOTICS: VISION, MANIPULATION AND SENSORS Consulting
INTELLIGENT UNMANNED GROUND VEHICLES Autonomous Navigation Research at Carnegie Mellon THE KLUWER INTERNATIONAL SERIES IN ENGINEERING AND COMPUTER SCIENCE ROBOTICS: VISION, MANIPULATION AND SENSORS Consulting
Gesture Recognition with Real World Environment using Kinect: A Review
 Gesture Recognition with Real World Environment using Kinect: A Review Prakash S. Sawai 1, Prof. V. K. Shandilya 2 P.G. Student, Department of Computer Science & Engineering, Sipna COET, Amravati, Maharashtra,
Gesture Recognition with Real World Environment using Kinect: A Review Prakash S. Sawai 1, Prof. V. K. Shandilya 2 P.G. Student, Department of Computer Science & Engineering, Sipna COET, Amravati, Maharashtra,