S8223: Simulating a City: GPU Simulations of Traffic, Crowds and Beyond
|
|
|
- Loraine Washington
- 5 years ago
- Views:
Transcription






1 S8223: Simulating a City: GPU Simulations of Traffic, Crowds and Beyond Dr Paul Richmond Contributors: Peter Heywood, Robert Chisholm, Mozhgan Kabiri-Chimeh, John Charlton & Steve Maddock
![Context: Everyone hates delays Road Travel Projections for 2040 [1] Up to 42% increase of car ownership 19 to 55% growth of UK road traffic Demand will be greater than supply Need to improve the](/docs-images/93/111773961/images/2-2.jpg "supply [1] Department for Transport, Road traffic forecasts 2015. https://www.gov.uk/government/uploads/system/ uploads/attachment_data/file/260700/road-transport-forecasts-2013-extended-version.")
2 Context: Everyone hates delays Road Travel Projections for 2040 [1] Up to 42% increase of car ownership 19 to 55% growth of UK road traffic Demand will be greater than supply Need to improve the supply [1] Department for Transport, Road traffic forecasts uploads/attachment_data/file/260700/road-transport-forecasts-2013-extended-version.pdf, Mar
![Why City Simulations? Highways England 709M costs for maintaining UK strategic Motorway and A-Road network in 2010/2011 [1] Changing and maintaining infrastructure is very expensive!](/docs-images/93/111773961/images/3-2.jpg "Simulation allows Understanding of the impact of changes to the transport network Understanding of the impact of infrastructure investment Intelligent management of vehicles, people and")
![public transport Investigation of shocks to the system (unusual or dangerous event) All in a safe environment with minimal cost and disruption [1] - UK Department for Transport, Cost of](/docs-images/93/111773961/images/3-3.jpg "maintaining the Highways Agency s motorway and A road network per lane mile. https://www.gov.")
3 Why City Simulations? Highways England 709M costs for maintaining UK strategic Motorway and A-Road network in 2010/2011 [1] Changing and maintaining infrastructure is very expensive! Simulation allows Understanding of the impact of changes to the transport network Understanding of the impact of infrastructure investment Intelligent management of vehicles, people and public transport Investigation of shocks to the system (unusual or dangerous event) All in a safe environment with minimal cost and disruption [1] - UK Department for Transport, Cost of maintaining the Highways Agency s motorway and A road network per lane mile. cost-of-maintaining-the-highways-agency-s-motorway-and-a-road-network-per-lane-mile,2011.
4 The Role of GPUs Talk Outline Acceleration of existing city simulation tools The development of new simulation approaches Removal of simulation bottlenecks to do new things


 Car behaviours, local")
5 Bottom Up Top Down Macro, Meso, Micro: How to Simulate a City Macroscopic Concerned with flows and networks Mesoscopic In the middle Combine aspects of micro models E.g. Junction flow delays Microscopic Individual Level Modelling (Agent Based Modelling) Car behaviours, local interactions, pedestrian behaviour Computationally expensive

 - Average of 3 repetitions Research Funded by ATKINS")
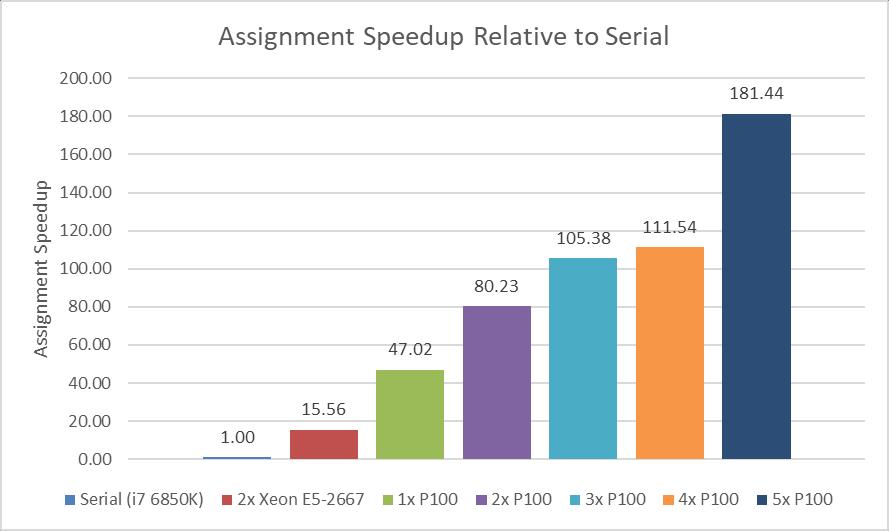
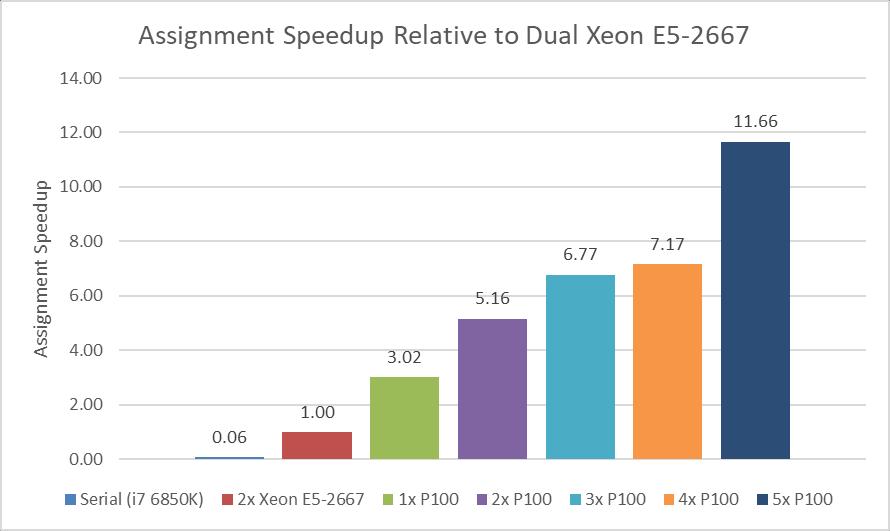
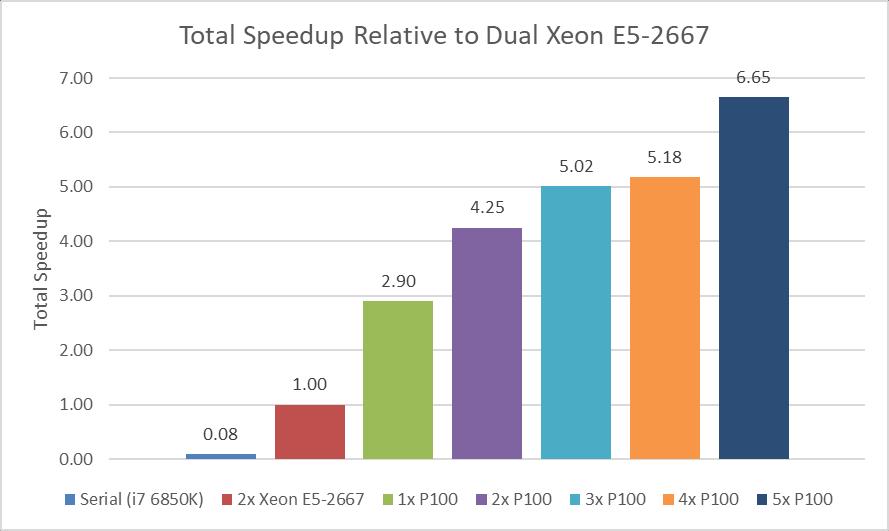
6 Speedup compared to serial Macro/Mesoscopic simulation platform Used by Highways Agency, TfL and local councils Performance Optimised with OpenMP for multi-core Demonstrates diminishing returns Requirement to scale to regional and national models LoHAM is Londan and surrounding area Single Assignment-Loop Speedup against Thread Count (LoHAM model) Thread Count i7 6850k (6 cores - 12 threads) - Average of 3 repetitions Research Funded by ATKINS Global
7 Computational Bottleneck Iterative convergent algorithm Typical within transport modelling Simulation Adjusts network flow costs Simulates junction delays based off demand Assignment (97% serial runtime) Inputs Network and cost of links/edges Origin-Destination Matrix Output Traffic flow per edge 1. Single Source Shortest Path - SSSP All-or-Nothing Path For each origin in the O-D matrix 2. Flow (Accumulation) Apply the OD value for each trip to each link on the route Traffic flow per link (road) 100% 90% 80% 70% 60% 50% 40% 30% 20% 10% 0% Simulation Assignment Runtime (LoHAM model) Flow Serial Flow delay costs SSSP
8 N 1 N 2 Single Source Shortest Path For a single Origin/Source Node (N 1 ) Find the route to each Destination Node (N 7 ) With the Lowest Cumulative Weight (Cost) N 4 N 3 N N 6 N N 7 Node Back link Cost N 1 Calculate for all source destination pairs N 2 N N 3 N N 4 N N 5 N N 6 N N 7 N N 8 N 6 0.2
![Multi-GPU Origin-Vertex Frontier Gunrock [1], NVGraph: State of the art SSSP implementations Favour large dense graphs (e.g. social media graphs) Transport networks are highdiameter low density E.](/docs-images/93/111773961/images/9-2.jpg "g. LoHAM: TODO Origin-Vertex Frontier Combines many (each origin) SSSP calculations to increase parallel workload Each origin-vertex for")
 used to balance workload Multi-GPU: Balanced")
9 Multi-GPU Origin-Vertex Frontier Gunrock [1], NVGraph: State of the art SSSP implementations Favour large dense graphs (e.g. social media graphs) Transport networks are highdiameter low density E.g. LoHAM: TODO Origin-Vertex Frontier Combines many (each origin) SSSP calculations to increase parallel workload Each origin-vertex for consideration stored in a frontier. Sorted each iteration to improve data access pattern Co-operative thread array (CTA) used to balance workload Multi-GPU: Balanced distribution of multiple vehicle classes [1] GTC 2016: ID S6374
10 Results
11 The Role of GPUs Talk Outline Acceleration of existing city simulation tools The development of new simulation approaches Removal of simulation bottlenecks to do new things

12 Flexible Micro-simulation with FLAME GPU High Level Description of Agents Represent the properties of Pedestrians/Vehicles. E.g. location, velocity, etc. High Level Scripting of Behaviour The model dynamics such as avoidance, car following, navigation, etc. Communication abstracted as messages to hide underlying algorithm Automated GPU Code Generation Complete abstraction from the GPU Templates generate CUDA simulation code


13 Road Network Model Funded by Department for Transport (TTRIG), In collaboration with TSS UK (AimSum)
14 FLAME GPU vehicle model function FLAME_GPU_FUNC int checknextjunction(xmachine_memory_car* agent, xmachine_message_junctionmessage_list* junctionmessage_messages, xmachine_message_junctionmessage_bounds* message_bounds) { // Get the junction of current vehicle unsigned int junction = get_staticgraph_roadnetwork_edge_destination(agent->edgeid); // Load the first junction message xmachine_message_junctionmessage* current_message = get_first_junctionmessage_message(junctionmessage_messages, message_bounds, junction); // Iterate over junction messages (vehicles at this junction) while (current_message) { // Check if agent on junction is leading this vehicle if (vehicleisleading(agent, current_message)){ updateleadvehicle(agent, current_message); } } // Get next junction message (vehicles at this junction) current_message = get_next_junctionmessage_message(current_message, junctionmessage_messages, message_bounds); } return 0;

15 Road Network Simulation Benchmark Scalable Manhattan Grid Network Comparative Implementation in AimSum Commercial Multi-core simulation platform Vehicle performing update calculation Neighbour vehicle considered by network communication messaging Neighbour vehicle considered by fixed radius communication messaging Neighbour vehicle considered by all to all communication messaging
16
17 Performance results Largest model: 576k Vehicles and ~2M detectors Real Time Ratio 39x Titan V 26x P100 Up to 65x Speedup Speedup Over Multi-core (512k vehicles) 65x Titan V 44x P100 Peter Heywood, Steve Maddock, Jordi Casas, David Garcia, Mark Brackstone, Paul Richmond, Data-parallel agent-based microscopic road network simulation using graphics processing units (2018), Simulation Modelling Practice and Theory, Volume 83, pp ,
18 The Role of GPUs Talk Outline Acceleration of existing city simulation tools The development of new simulation approaches Removal of simulation bottlenecks to do new things
![Fast Accurate Pedestrian Collision Avoidance Force based pedestrian simulation models Fast but not accurate in dense conditions Results in agent overlaps ORCA[1] Model Optimal Reciprocal Collision](/docs-images/93/111773961/images/19-2.jpg "Avoidance Solve set of linear velocity constraints Unbalanced workload per agent FLAME GPU implementation with thread block workload redistribution Example of simulation Corresponding ORCA lines for")
19 Fast Accurate Pedestrian Collision Avoidance Force based pedestrian simulation models Fast but not accurate in dense conditions Results in agent overlaps ORCA[1] Model Optimal Reciprocal Collision Avoidance Solve set of linear velocity constraints Unbalanced workload per agent FLAME GPU implementation with thread block workload redistribution Example of simulation Corresponding ORCA lines for agent A [1] Van Den Berg, Jur, Stephen J. Guy, Ming Lin, and Dinesh Manocha. Reciprocal N-Body Collision Avoidance. In Robotics Research, Springer, 2011.


20 SIEMENS Sheffield Advanced Multi-Model Simulator

21 Multi-modal Simulations Observe impact of city wide delays on rail network Measure individual passenger experience through entire journey Visualise pedestrian behaviour. E.g. station congestion Identify improvements for public transport Investigate major infrastructure investment projects High Congestion Platform Low Congestion Platform


22 Interactive Simulations within Virtual Environment Prototype new models such as Autonomous pods Interaction within VR via OmniDeck 6 6m 360 treadmill 16 sets active triangular rolers User location tracking Immersive interaction with crowds Simulation coupled with UNREAL engine Available at the Transport Systems Catapult (UK)
23 Summary and Future Work GPUs are a major step change in City simulation performance Existing tools can offer orders of magnitude in performance improvements Multi-agent simulation (with FLAME GPU) is flexible and highly efficient for vehicle and pedestrian simulations Coupling multi-agent simulation with existing modelling adds new ways to explore infrastructure and transportation initiatives Future Work: Simulation Implications for AI Can used to generate realistic training data (from dangerous or rare events) AI and ML can be coupled to predict simulation outcomes Questions? Vote for our Top 5 Finalist Poster: P8215 Data-Parallel Agent-Based Microscopic Road Network Simulation using GPUs
Comparison of Simulation-Based Dynamic Traffic Assignment Approaches for Planning and Operations Management
 Comparison of Simulation-Based Dynamic Traffic Assignment Approaches for Planning and Operations Management Ramachandran Balakrishna Daniel Morgan Qi Yang Howard Slavin Caliper Corporation 4 th TRB Conference
Comparison of Simulation-Based Dynamic Traffic Assignment Approaches for Planning and Operations Management Ramachandran Balakrishna Daniel Morgan Qi Yang Howard Slavin Caliper Corporation 4 th TRB Conference
Linking TransCAD to Synchro Micro-simulation
 Linking TransCAD to Synchro Micro-simulation -Using DTA as an Intermediate Maggie Lin Dr. Zong Tian (CATER) Outline Background / Introduction Development of DTA model Using DTA for Conversion Conclusions
Linking TransCAD to Synchro Micro-simulation -Using DTA as an Intermediate Maggie Lin Dr. Zong Tian (CATER) Outline Background / Introduction Development of DTA model Using DTA for Conversion Conclusions
Aimsun Next User's Manual
 Aimsun Next User's Manual 1. A quick guide to the new features available in Aimsun Next 8.3 1. Introduction 2. Aimsun Next 8.3 Highlights 3. Outputs 4. Traffic management 5. Microscopic simulator 6. Mesoscopic
Aimsun Next User's Manual 1. A quick guide to the new features available in Aimsun Next 8.3 1. Introduction 2. Aimsun Next 8.3 Highlights 3. Outputs 4. Traffic management 5. Microscopic simulator 6. Mesoscopic
Traffic Management for Smart Cities TNK115 SMART CITIES
 Traffic Management for Smart Cities TNK115 SMART CITIES DAVID GUNDLEGÅRD DIVISION OF COMMUNICATION AND TRANSPORT SYSTEMS Outline Introduction Traffic sensors Traffic models Frameworks Information VS Control
Traffic Management for Smart Cities TNK115 SMART CITIES DAVID GUNDLEGÅRD DIVISION OF COMMUNICATION AND TRANSPORT SYSTEMS Outline Introduction Traffic sensors Traffic models Frameworks Information VS Control
VRGraphicS Virtual Reality, Computer Graphics and Simulation. Steve Maddock (head of group), Paul Richmond, Daniela Romano
, Paul Richmond, Daniela Romano") VRGraphicS Virtual Reality, Computer Graphics and Simulation Steve Maddock (head of group), Paul Richmond, Daniela Romano VRGraphicS Steve Maddock (SL, Head of Group) Facial modelling and animation; human
VRGraphicS Virtual Reality, Computer Graphics and Simulation Steve Maddock (head of group), Paul Richmond, Daniela Romano VRGraphicS Steve Maddock (SL, Head of Group) Facial modelling and animation; human
Design of Traffic Flow Simulation System to Minimize Intersection Waiting Time
 Design of Traffic Flow Simulation System to Minimize Intersection Waiting Time Jang, Seung-Ju Department of Computer Engineering, Dongeui University Abstract This paper designs a traffic simulation system
Design of Traffic Flow Simulation System to Minimize Intersection Waiting Time Jang, Seung-Ju Department of Computer Engineering, Dongeui University Abstract This paper designs a traffic simulation system
Connected Car Networking
 Connected Car Networking Teng Yang, Francis Wolff and Christos Papachristou Electrical Engineering and Computer Science Case Western Reserve University Cleveland, Ohio Outline Motivation Connected Car
Connected Car Networking Teng Yang, Francis Wolff and Christos Papachristou Electrical Engineering and Computer Science Case Western Reserve University Cleveland, Ohio Outline Motivation Connected Car
DEVELOPMENT OF A MICROSCOPIC TRAFFIC SIMULATION MODEL FOR INTERACTIVE TRAFFIC ENVIRONMENT
 DEVELOPMENT OF A MICROSCOPIC TRAFFIC SIMULATION MODEL FOR INTERACTIVE TRAFFIC ENVIRONMENT Tomoyoshi SHIRAISHI, Hisatomo HANABUSA, Masao KUWAHARA, Edward CHUNG, Shinji TANAKA, Hideki UENO, Yoshikazu OHBA,
DEVELOPMENT OF A MICROSCOPIC TRAFFIC SIMULATION MODEL FOR INTERACTIVE TRAFFIC ENVIRONMENT Tomoyoshi SHIRAISHI, Hisatomo HANABUSA, Masao KUWAHARA, Edward CHUNG, Shinji TANAKA, Hideki UENO, Yoshikazu OHBA,
ADAS Development using Advanced Real-Time All-in-the-Loop Simulators. Roberto De Vecchi VI-grade Enrico Busto - AddFor
 ADAS Development using Advanced Real-Time All-in-the-Loop Simulators Roberto De Vecchi VI-grade Enrico Busto - AddFor The Scenario The introduction of ADAS and AV has created completely new challenges
ADAS Development using Advanced Real-Time All-in-the-Loop Simulators Roberto De Vecchi VI-grade Enrico Busto - AddFor The Scenario The introduction of ADAS and AV has created completely new challenges
Region-wide Microsimulation-based DTA: Context, Approach, and Implementation for NFTPO
 Region-wide Microsimulation-based DTA: Context, Approach, and Implementation for NFTPO presented by Howard Slavin & Daniel Morgan Caliper Corporation March 27, 2014 Context: Motivation Technical Many transportation
Region-wide Microsimulation-based DTA: Context, Approach, and Implementation for NFTPO presented by Howard Slavin & Daniel Morgan Caliper Corporation March 27, 2014 Context: Motivation Technical Many transportation
ITS Radiocommunications in Japan Progress report and future directions
 ITS Radiocommunications in Japan Progress report and future directions 6 March 2018 Berlin, Germany Tomoaki Ishii Assistant Director, New-Generation Mobile Communications Office, Radio Dept., Telecommunications
ITS Radiocommunications in Japan Progress report and future directions 6 March 2018 Berlin, Germany Tomoaki Ishii Assistant Director, New-Generation Mobile Communications Office, Radio Dept., Telecommunications
Intelligent Technology for More Advanced Autonomous Driving
 FEATURED ARTICLES Autonomous Driving Technology for Connected Cars Intelligent Technology for More Advanced Autonomous Driving Autonomous driving is recognized as an important technology for dealing with
FEATURED ARTICLES Autonomous Driving Technology for Connected Cars Intelligent Technology for More Advanced Autonomous Driving Autonomous driving is recognized as an important technology for dealing with
How technology can enable the fourth industrial revolution. Lynne McGregor 28 February 2018
 How technology can enable the fourth industrial revolution Lynne McGregor 28 February 2018 What is 4IR and how can it help the UK economy? Industry 4.0 is the digital transformation of manufacturing: leveraging
How technology can enable the fourth industrial revolution Lynne McGregor 28 February 2018 What is 4IR and how can it help the UK economy? Industry 4.0 is the digital transformation of manufacturing: leveraging
Final Version of Micro-Simulator
 Scalable Data Analytics, Scalable Algorithms, Software Frameworks and Visualization ICT-2013 4.2.a Project FP6-619435/SPEEDD Deliverable D8.4 Distribution Public http://speedd-project.eu Final Version
Scalable Data Analytics, Scalable Algorithms, Software Frameworks and Visualization ICT-2013 4.2.a Project FP6-619435/SPEEDD Deliverable D8.4 Distribution Public http://speedd-project.eu Final Version
Pedestrian Simulation in Transit Stations Using Agent-Based Analysis
 Urban Rail Transit (2017) 3(1):54 60 DOI 10.1007/s40864-017-0053-5 http://www.urt.cn/ ORIGINAL RESEARCH PAPERS Pedestrian Simulation in Transit Stations Using Agent-Based Analysis Ming Tang 1 Yingdong
Urban Rail Transit (2017) 3(1):54 60 DOI 10.1007/s40864-017-0053-5 http://www.urt.cn/ ORIGINAL RESEARCH PAPERS Pedestrian Simulation in Transit Stations Using Agent-Based Analysis Ming Tang 1 Yingdong
SATURN 101: Part 3 Improving Convergence
 SATURN 101: Part 3 Improving Convergence 2018 User Group Meeting November 2018 Final 03/12/18 - UGM2018 SAT101 Part 3 Improving Convergence Dirck Van Vliet SATURN Assignment 101 Part 3 - Recap on SAVEIT
SATURN 101: Part 3 Improving Convergence 2018 User Group Meeting November 2018 Final 03/12/18 - UGM2018 SAT101 Part 3 Improving Convergence Dirck Van Vliet SATURN Assignment 101 Part 3 - Recap on SAVEIT
Big data in Thessaloniki
 Big data in Thessaloniki Josep Maria Salanova Grau Center for Research and Technology Hellas Hellenic Institute of Transport Email: jose@certh.gr - emit@certh.gr Web: www.hit.certh.gr Big data in Thessaloniki
Big data in Thessaloniki Josep Maria Salanova Grau Center for Research and Technology Hellas Hellenic Institute of Transport Email: jose@certh.gr - emit@certh.gr Web: www.hit.certh.gr Big data in Thessaloniki
Safe, Efficient and Effective Testing of Connected and Autonomous Vehicles Paul Jennings. Franco-British Symposium on ITS 5 th October 2016
 Safe, Efficient and Effective Testing of Connected and Autonomous Vehicles Paul Jennings Franco-British Symposium on ITS 5 th October 2016 An academic department within the science faculty Established
Safe, Efficient and Effective Testing of Connected and Autonomous Vehicles Paul Jennings Franco-British Symposium on ITS 5 th October 2016 An academic department within the science faculty Established
Visualisation of Traffic Behaviour Using Computer Simulation Models
 Journal of Maps ISSN: (Print) 1744-5647 (Online) Journal homepage: http://www.tandfonline.com/loi/tjom20 Visualisation of Traffic Behaviour Using Computer Simulation Models Joerg M. Tonndorf & Vladimir
Journal of Maps ISSN: (Print) 1744-5647 (Online) Journal homepage: http://www.tandfonline.com/loi/tjom20 Visualisation of Traffic Behaviour Using Computer Simulation Models Joerg M. Tonndorf & Vladimir
Traffic Control for a Swarm of Robots: Avoiding Group Conflicts
 Traffic Control for a Swarm of Robots: Avoiding Group Conflicts Leandro Soriano Marcolino and Luiz Chaimowicz Abstract A very common problem in the navigation of robotic swarms is when groups of robots
Traffic Control for a Swarm of Robots: Avoiding Group Conflicts Leandro Soriano Marcolino and Luiz Chaimowicz Abstract A very common problem in the navigation of robotic swarms is when groups of robots
Moving Path Planning Forward
 Moving Path Planning Forward Nathan R. Sturtevant Department of Computer Science University of Denver Denver, CO, USA sturtevant@cs.du.edu Abstract. Path planning technologies have rapidly improved over
Moving Path Planning Forward Nathan R. Sturtevant Department of Computer Science University of Denver Denver, CO, USA sturtevant@cs.du.edu Abstract. Path planning technologies have rapidly improved over
Characteristics of Routes in a Road Traffic Assignment
 Characteristics of Routes in a Road Traffic Assignment by David Boyce Northwestern University, Evanston, IL Hillel Bar-Gera Ben-Gurion University of the Negev, Israel at the PTV Vision Users Group Meeting
Characteristics of Routes in a Road Traffic Assignment by David Boyce Northwestern University, Evanston, IL Hillel Bar-Gera Ben-Gurion University of the Negev, Israel at the PTV Vision Users Group Meeting
2 Smart Cities. Big Data, Real Time Transport, Social Media, and Urban Simulation Michael
 5 th February 2014 2 Smart Cities Big Data, Real Time Transport, Social Media, and Urban Simulation Michael Batty m.batty@ucl.ac.uk @jmichaelbatty http://www.complexcity.info/ http://www.casa.ucl.ac.uk/
5 th February 2014 2 Smart Cities Big Data, Real Time Transport, Social Media, and Urban Simulation Michael Batty m.batty@ucl.ac.uk @jmichaelbatty http://www.complexcity.info/ http://www.casa.ucl.ac.uk/
HARDWARE ACCELERATION OF THE GIPPS MODEL
 HARDWARE ACCELERATION OF THE GIPPS MODEL FOR REAL-TIME TRAFFIC SIMULATION Salim Farah 1 and Magdy Bayoumi 2 The Center for Advanced Computer Studies, University of Louisiana at Lafayette, USA 1 snf3346@cacs.louisiana.edu
HARDWARE ACCELERATION OF THE GIPPS MODEL FOR REAL-TIME TRAFFIC SIMULATION Salim Farah 1 and Magdy Bayoumi 2 The Center for Advanced Computer Studies, University of Louisiana at Lafayette, USA 1 snf3346@cacs.louisiana.edu
Stanford Center for AI Safety
 Stanford Center for AI Safety Clark Barrett, David L. Dill, Mykel J. Kochenderfer, Dorsa Sadigh 1 Introduction Software-based systems play important roles in many areas of modern life, including manufacturing,
Stanford Center for AI Safety Clark Barrett, David L. Dill, Mykel J. Kochenderfer, Dorsa Sadigh 1 Introduction Software-based systems play important roles in many areas of modern life, including manufacturing,
Distributed Simulation of Dense Crowds
 Distributed Simulation of Dense Crowds Sergei Gorlatch, Christoph Hemker, and Dominique Meilaender University of Muenster, Germany Email: {gorlatch,hemkerc,d.meil}@uni-muenster.de Abstract By extending
Distributed Simulation of Dense Crowds Sergei Gorlatch, Christoph Hemker, and Dominique Meilaender University of Muenster, Germany Email: {gorlatch,hemkerc,d.meil}@uni-muenster.de Abstract By extending
A Roadmap for Connected & Autonomous Vehicles. David Skipp Ford Motor Company
 A Roadmap for Connected & Autonomous Vehicles David Skipp Ford Motor Company ! Why does an Autonomous Vehicle need a roadmap? Where might the roadmap take us? What should we focus on next? Why does an
A Roadmap for Connected & Autonomous Vehicles David Skipp Ford Motor Company ! Why does an Autonomous Vehicle need a roadmap? Where might the roadmap take us? What should we focus on next? Why does an
The 3xD Simulator for Intelligent Vehicles Professor Paul Jennings. 20 th October 2016
 The 3xD Simulator for Intelligent Vehicles Professor Paul Jennings 20 th October 2016 An academic department within the science faculty Established in 1980 by Professor Lord Bhattacharyya as Warwick Manufacturing
The 3xD Simulator for Intelligent Vehicles Professor Paul Jennings 20 th October 2016 An academic department within the science faculty Established in 1980 by Professor Lord Bhattacharyya as Warwick Manufacturing
EXPLORING SIMULATION BASED DYNAMIC TRAFFIC ASSIGNMENT WITH A LARGE-SCALE MICROSCOPIC TRAFFIC SIMULATION MODEL
 EXPLORING SIMULATION BASED DYNAMIC TRAFFIC ASSIGNMENT WITH A LARGE-SCALE MICROSCOPIC TRAFFIC SIMULATION MODEL Peter Foytik Craig Jordan R. Michael Robinson Virginia Modeling Analysis and Simulation Center
EXPLORING SIMULATION BASED DYNAMIC TRAFFIC ASSIGNMENT WITH A LARGE-SCALE MICROSCOPIC TRAFFIC SIMULATION MODEL Peter Foytik Craig Jordan R. Michael Robinson Virginia Modeling Analysis and Simulation Center
Intelligent Driving Agents
 Intelligent Driving Agents The agent approach to tactical driving in autonomous vehicles and traffic simulation Presentation Master s thesis Patrick Ehlert January 29 th, 2001 Imagine. Sensors Actuators
Intelligent Driving Agents The agent approach to tactical driving in autonomous vehicles and traffic simulation Presentation Master s thesis Patrick Ehlert January 29 th, 2001 Imagine. Sensors Actuators
MOBILITY RESEARCH NEEDS FROM THE GOVERNMENT PERSPECTIVE
 MOBILITY RESEARCH NEEDS FROM THE GOVERNMENT PERSPECTIVE First Annual 2018 National Mobility Summit of US DOT University Transportation Centers (UTC) April 12, 2018 Washington, DC Research Areas Cooperative
MOBILITY RESEARCH NEEDS FROM THE GOVERNMENT PERSPECTIVE First Annual 2018 National Mobility Summit of US DOT University Transportation Centers (UTC) April 12, 2018 Washington, DC Research Areas Cooperative
Catapult Network Summary
 Catapult Network Summary 2017 TURNING RESEARCH AND INNOVATION INTO GROWTH Economic impact through turning opportunities into real-world applications The UK s Catapults harness world-class strengths in
Catapult Network Summary 2017 TURNING RESEARCH AND INNOVATION INTO GROWTH Economic impact through turning opportunities into real-world applications The UK s Catapults harness world-class strengths in
Travel time uncertainty and network models
 Travel time uncertainty and network models CE 392C TRAVEL TIME UNCERTAINTY One major assumption throughout the semester is that travel times can be predicted exactly and are the same every day. C = 25.87321
Travel time uncertainty and network models CE 392C TRAVEL TIME UNCERTAINTY One major assumption throughout the semester is that travel times can be predicted exactly and are the same every day. C = 25.87321
Evaluation of Connected Vehicle Technology for Concept Proposal Using V2X Testbed
 AUTOMOTIVE Evaluation of Connected Vehicle Technology for Concept Proposal Using V2X Testbed Yoshiaki HAYASHI*, Izumi MEMEZAWA, Takuji KANTOU, Shingo OHASHI, and Koichi TAKAYAMA ----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
AUTOMOTIVE Evaluation of Connected Vehicle Technology for Concept Proposal Using V2X Testbed Yoshiaki HAYASHI*, Izumi MEMEZAWA, Takuji KANTOU, Shingo OHASHI, and Koichi TAKAYAMA ----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
Dr George Gillespie. CEO HORIBA MIRA Ltd. Sponsors
 Dr George Gillespie CEO HORIBA MIRA Ltd Sponsors Intelligent Connected Vehicle Roadmap George Gillespie September 2017 www.automotivecouncil.co.uk ICV Roadmap built on Travellers Needs study plus extensive
Dr George Gillespie CEO HORIBA MIRA Ltd Sponsors Intelligent Connected Vehicle Roadmap George Gillespie September 2017 www.automotivecouncil.co.uk ICV Roadmap built on Travellers Needs study plus extensive
Mathematical Problems in Networked Embedded Systems
 Mathematical Problems in Networked Embedded Systems Miklós Maróti Institute for Software Integrated Systems Vanderbilt University Outline Acoustic ranging TDMA in globally asynchronous locally synchronous
Mathematical Problems in Networked Embedded Systems Miklós Maróti Institute for Software Integrated Systems Vanderbilt University Outline Acoustic ranging TDMA in globally asynchronous locally synchronous
Vehicle speed and volume measurement using V2I communication
 Vehicle speed and volume measurement using VI communication Quoc Chuyen DOAN IRSEEM-ESIGELEC ITS division Saint Etienne du Rouvray 76801 - FRANCE doan@esigelec.fr Tahar BERRADIA IRSEEM-ESIGELEC ITS division
Vehicle speed and volume measurement using VI communication Quoc Chuyen DOAN IRSEEM-ESIGELEC ITS division Saint Etienne du Rouvray 76801 - FRANCE doan@esigelec.fr Tahar BERRADIA IRSEEM-ESIGELEC ITS division
Dynamic Network Energy Management via Proximal Message Passing
 Dynamic Network Energy Management via Proximal Message Passing Matt Kraning, Eric Chu, Javad Lavaei, and Stephen Boyd Google, 2/20/2013 1 Outline Introduction Model Device examples Algorithm Numerical
Dynamic Network Energy Management via Proximal Message Passing Matt Kraning, Eric Chu, Javad Lavaei, and Stephen Boyd Google, 2/20/2013 1 Outline Introduction Model Device examples Algorithm Numerical
Fig.2 the simulation system model framework
 International Conference on Information Science and Computer Applications (ISCA 2013) Simulation and Application of Urban intersection traffic flow model Yubin Li 1,a,Bingmou Cui 2,b,Siyu Hao 2,c,Yan Wei
International Conference on Information Science and Computer Applications (ISCA 2013) Simulation and Application of Urban intersection traffic flow model Yubin Li 1,a,Bingmou Cui 2,b,Siyu Hao 2,c,Yan Wei
Path Planning in Dynamic Environments Using Time Warps. S. Farzan and G. N. DeSouza
 Path Planning in Dynamic Environments Using Time Warps S. Farzan and G. N. DeSouza Outline Introduction Harmonic Potential Fields Rubber Band Model Time Warps Kalman Filtering Experimental Results 2 Introduction
Path Planning in Dynamic Environments Using Time Warps S. Farzan and G. N. DeSouza Outline Introduction Harmonic Potential Fields Rubber Band Model Time Warps Kalman Filtering Experimental Results 2 Introduction
TRB Innovations in Travel Modeling Atlanta, June 25, 2018
 Using an Activity-Based Model with Dynamic Traffic Simulation to Explore Scenarios for Private and Shared Autonomous Vehicle Use in Jacksonville with TRB Innovations in Travel Modeling Atlanta, June 25,
Using an Activity-Based Model with Dynamic Traffic Simulation to Explore Scenarios for Private and Shared Autonomous Vehicle Use in Jacksonville with TRB Innovations in Travel Modeling Atlanta, June 25,
What will the robot do during the final demonstration?
 SPENCER Questions & Answers What is project SPENCER about? SPENCER is a European Union-funded research project that advances technologies for intelligent robots that operate in human environments. Such
SPENCER Questions & Answers What is project SPENCER about? SPENCER is a European Union-funded research project that advances technologies for intelligent robots that operate in human environments. Such
SOUND: A Traffic Simulation Model for Oversaturated Traffic Flow on Urban Expressways
 SOUND: A Traffic Simulation Model for Oversaturated Traffic Flow on Urban Expressways Toshio Yoshii 1) and Masao Kuwahara 2) 1: Research Assistant 2: Associate Professor Institute of Industrial Science,
SOUND: A Traffic Simulation Model for Oversaturated Traffic Flow on Urban Expressways Toshio Yoshii 1) and Masao Kuwahara 2) 1: Research Assistant 2: Associate Professor Institute of Industrial Science,
Connected Smart Cities and Communities
 Connected Smart Cities and Communities Intelligent Technologies in Smart Cities Dr. Cristina Olaverri Monreal olaverri@technikum-wien.at 1 Connected Smart Cities and Communities Connected and Smart Cities
Connected Smart Cities and Communities Intelligent Technologies in Smart Cities Dr. Cristina Olaverri Monreal olaverri@technikum-wien.at 1 Connected Smart Cities and Communities Connected and Smart Cities
RECOMMENDATION ITU-R M.1310* TRANSPORT INFORMATION AND CONTROL SYSTEMS (TICS) OBJECTIVES AND REQUIREMENTS (Question ITU-R 205/8)
 OBJECTIVES AND REQUIREMENTS (Question ITU-R 205/8)") Rec. ITU-R M.1310 1 RECOMMENDATION ITU-R M.1310* TRANSPORT INFORMATION AND CONTROL SYSTEMS (TICS) OBJECTIVES AND REQUIREMENTS (Question ITU-R 205/8) Rec. ITU-R M.1310 (1997) Summary This Recommendation
Rec. ITU-R M.1310 1 RECOMMENDATION ITU-R M.1310* TRANSPORT INFORMATION AND CONTROL SYSTEMS (TICS) OBJECTIVES AND REQUIREMENTS (Question ITU-R 205/8) Rec. ITU-R M.1310 (1997) Summary This Recommendation
Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation
 Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation Hiroshi Ishiguro Department of Information Science, Kyoto University Sakyo-ku, Kyoto 606-01, Japan E-mail: ishiguro@kuis.kyoto-u.ac.jp
Distributed Vision System: A Perceptual Information Infrastructure for Robot Navigation Hiroshi Ishiguro Department of Information Science, Kyoto University Sakyo-ku, Kyoto 606-01, Japan E-mail: ishiguro@kuis.kyoto-u.ac.jp
Virtual testing by coupling high fidelity vehicle simulation with microscopic traffic flow simulation
 DYNA4 with DYNAanimation in Co-Simulation with SUMO vehicle under test Virtual testing by coupling high fidelity vehicle simulation with microscopic traffic flow simulation Dr.-Ing. Jakob Kaths TESIS GmbH
DYNA4 with DYNAanimation in Co-Simulation with SUMO vehicle under test Virtual testing by coupling high fidelity vehicle simulation with microscopic traffic flow simulation Dr.-Ing. Jakob Kaths TESIS GmbH
Use of Dynamic Traffic Assignment in FSUTMS in Support of Transportation Planning in Florida
 Use of Dynamic Traffic Assignment in FSUTMS in Support of Transportation Planning in Florida Requirement Workshop December 2, 2010 Need for Assignment Estimating link flows Estimating zone to zone travel
Use of Dynamic Traffic Assignment in FSUTMS in Support of Transportation Planning in Florida Requirement Workshop December 2, 2010 Need for Assignment Estimating link flows Estimating zone to zone travel
Adaptive signal Control. Tom Mathew
 Adaptive signal Control Tom Mathew Adaptive Control: Outline 1. Signal Control Taxonomy 2. Coordinated Signal System 3. Vehicle Actuated System 4. Area Traffic Control (Responsive) 5. Adaptive Traffic
Adaptive signal Control Tom Mathew Adaptive Control: Outline 1. Signal Control Taxonomy 2. Coordinated Signal System 3. Vehicle Actuated System 4. Area Traffic Control (Responsive) 5. Adaptive Traffic
Route Choice Behaviour In A Three Roads Scenario. Dominik Wegerle. Michael Schreckenberg
 Route Choice Behaviour In A Three Roads Scenario Dominik Wegerle. Michael Schreckenberg 28.10.2015 Dynamics in Navigation government-funded by www.uni-due.de/ptt TGF 15. 28.10.2015 Dominik Wegerle 2 /
Route Choice Behaviour In A Three Roads Scenario Dominik Wegerle. Michael Schreckenberg 28.10.2015 Dynamics in Navigation government-funded by www.uni-due.de/ptt TGF 15. 28.10.2015 Dominik Wegerle 2 /
FUTURE OF MOBILITY. Dr Rupert Wilmouth Head of Sustainable Economy
 FUTURE OF MOBILITY Dr Rupert Wilmouth Head of Sustainable Economy Government Office for Science Leading GO-Science is Professor Sir Mark Walport, Government Chief Scientific Adviser: Our role is to advise
FUTURE OF MOBILITY Dr Rupert Wilmouth Head of Sustainable Economy Government Office for Science Leading GO-Science is Professor Sir Mark Walport, Government Chief Scientific Adviser: Our role is to advise
The GATEway Project London s Autonomous Push
 The GATEway Project London s Autonomous Push 06/2016 Why TRL? Unrivalled industry position with a focus on mobility 80 years independent transport research Public and private sector with global reach 350+
The GATEway Project London s Autonomous Push 06/2016 Why TRL? Unrivalled industry position with a focus on mobility 80 years independent transport research Public and private sector with global reach 350+
A SERVICE-ORIENTED SYSTEM ARCHITECTURE FOR THE HUMAN CENTERED DESIGN OF INTELLIGENT TRANSPORTATION SYSTEMS
 Tools and methodologies for ITS design and drivers awareness A SERVICE-ORIENTED SYSTEM ARCHITECTURE FOR THE HUMAN CENTERED DESIGN OF INTELLIGENT TRANSPORTATION SYSTEMS Jan Gačnik, Oliver Häger, Marco Hannibal
Tools and methodologies for ITS design and drivers awareness A SERVICE-ORIENTED SYSTEM ARCHITECTURE FOR THE HUMAN CENTERED DESIGN OF INTELLIGENT TRANSPORTATION SYSTEMS Jan Gačnik, Oliver Häger, Marco Hannibal
Maze Solving Algorithms for Micro Mouse
 Maze Solving Algorithms for Micro Mouse Surojit Guha Sonender Kumar surojitguha1989@gmail.com sonenderkumar@gmail.com Abstract The problem of micro-mouse is 30 years old but its importance in the field
Maze Solving Algorithms for Micro Mouse Surojit Guha Sonender Kumar surojitguha1989@gmail.com sonenderkumar@gmail.com Abstract The problem of micro-mouse is 30 years old but its importance in the field
Empowering People: How Artificial Intelligence is 07changing our world
 Empowering People: How Artificial Intelligence is 07changing our world The digital revolution is democratizing societal change, evolving human progress by helping people & organizations innovate in ways
Empowering People: How Artificial Intelligence is 07changing our world The digital revolution is democratizing societal change, evolving human progress by helping people & organizations innovate in ways
Steven King. Storytelling Experience. Leveraging VR, AR and Ai to engage audiences. Professor of Emerging TechnologiesCreating Immersive
 1 Steven King Professor of Emerging TechnologiesCreating Immersive Storytelling Experience Leveraging VR, AR and Ai to engage audiences 2 3 4 5 6 7 8 9 10 11 12 13 14 Storytelling with Emerging Technology
1 Steven King Professor of Emerging TechnologiesCreating Immersive Storytelling Experience Leveraging VR, AR and Ai to engage audiences 2 3 4 5 6 7 8 9 10 11 12 13 14 Storytelling with Emerging Technology
MULTI AGENT SYSTEM WITH ARTIFICIAL INTELLIGENCE
 MULTI AGENT SYSTEM WITH ARTIFICIAL INTELLIGENCE Sai Raghunandan G Master of Science Computer Animation and Visual Effects August, 2013. Contents Chapter 1...5 Introduction...5 Problem Statement...5 Structure...5
MULTI AGENT SYSTEM WITH ARTIFICIAL INTELLIGENCE Sai Raghunandan G Master of Science Computer Animation and Visual Effects August, 2013. Contents Chapter 1...5 Introduction...5 Problem Statement...5 Structure...5
THE FUTURE OF DATA AND INTELLIGENCE IN TRANSPORT
 THE FUTURE OF DATA AND INTELLIGENCE IN TRANSPORT Humanity s ability to use data and intelligence has increased dramatically People have always used data and intelligence to aid their journeys. In ancient
THE FUTURE OF DATA AND INTELLIGENCE IN TRANSPORT Humanity s ability to use data and intelligence has increased dramatically People have always used data and intelligence to aid their journeys. In ancient
Beneficial Role of Humans and AI in a Machine Age of the Telco EcoSystem
 Beneficial Role of Humans and AI in a Machine Age of the Telco EcoSystem Simon Thompson Head of Practice; Big Data and Customer Experience, BT Research & Innovation on behalf of Steve Cassidy (BT), Chris
Beneficial Role of Humans and AI in a Machine Age of the Telco EcoSystem Simon Thompson Head of Practice; Big Data and Customer Experience, BT Research & Innovation on behalf of Steve Cassidy (BT), Chris
Virtual Reality to Support Modelling. Martin Pett Modelling and Visualisation Business Unit Transport Systems Catapult
 Virtual Reality to Support Modelling Martin Pett Modelling and Visualisation Business Unit Transport Systems Catapult VIRTUAL REALITY TO SUPPORT MODELLING: WHY & WHAT IS IT GOOD FOR? Why is the TSC /M&V
Virtual Reality to Support Modelling Martin Pett Modelling and Visualisation Business Unit Transport Systems Catapult VIRTUAL REALITY TO SUPPORT MODELLING: WHY & WHAT IS IT GOOD FOR? Why is the TSC /M&V
Behaviour-Based Control. IAR Lecture 5 Barbara Webb
 Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Nagoya University Center of Innovation (COI)
") The 18th International Conference on Industrial Technology Innovation (ICITI, 2017) Nagoya University Center of Innovation (COI) -Empowering an aging society through advanced mobility- August 22, 2017
The 18th International Conference on Industrial Technology Innovation (ICITI, 2017) Nagoya University Center of Innovation (COI) -Empowering an aging society through advanced mobility- August 22, 2017
EVALUATION OF DIFFERENT MODALITIES FOR THE INTELLIGENT COOPERATIVE INTERSECTION SAFETY SYSTEM (IRIS) AND SPEED LIMIT SYSTEM
 AND SPEED LIMIT SYSTEM") Effects of ITS on drivers behaviour and interaction with the systems EVALUATION OF DIFFERENT MODALITIES FOR THE INTELLIGENT COOPERATIVE INTERSECTION SAFETY SYSTEM (IRIS) AND SPEED LIMIT SYSTEM Ellen S.
Effects of ITS on drivers behaviour and interaction with the systems EVALUATION OF DIFFERENT MODALITIES FOR THE INTELLIGENT COOPERATIVE INTERSECTION SAFETY SYSTEM (IRIS) AND SPEED LIMIT SYSTEM Ellen S.
Trip Assignment. Lecture Notes in Transportation Systems Engineering. Prof. Tom V. Mathew. 1 Overview 1. 2 Link cost function 2
 Trip Assignment Lecture Notes in Transportation Systems Engineering Prof. Tom V. Mathew Contents 1 Overview 1 2 Link cost function 2 3 All-or-nothing assignment 3 4 User equilibrium assignment (UE) 3 5
Trip Assignment Lecture Notes in Transportation Systems Engineering Prof. Tom V. Mathew Contents 1 Overview 1 2 Link cost function 2 3 All-or-nothing assignment 3 4 User equilibrium assignment (UE) 3 5
How data journalism can revolutionise local transport: A West Midlands case study
 How data journalism can revolutionise local transport: A West Midlands case study Never has there been a greater need for the transport sector to welcome the skills of data journalists, argues Teresa Jolley
How data journalism can revolutionise local transport: A West Midlands case study Never has there been a greater need for the transport sector to welcome the skills of data journalists, argues Teresa Jolley
A SYSTEM FOR VEHICLE DATA PROCESSING TO DETECT SPATIOTEMPORAL CONGESTED PATTERNS: THE SIMTD-APPROACH
 19th ITS World Congress, Vienna, Austria, 22/26 October 2012 EU-00062 A SYSTEM FOR VEHICLE DATA PROCESSING TO DETECT SPATIOTEMPORAL CONGESTED PATTERNS: THE SIMTD-APPROACH M. Koller, A. Elster#, H. Rehborn*,
19th ITS World Congress, Vienna, Austria, 22/26 October 2012 EU-00062 A SYSTEM FOR VEHICLE DATA PROCESSING TO DETECT SPATIOTEMPORAL CONGESTED PATTERNS: THE SIMTD-APPROACH M. Koller, A. Elster#, H. Rehborn*,
Accelerated Impulse Response Calculation for Indoor Optical Communication Channels
 Accelerated Impulse Response Calculation for Indoor Optical Communication Channels M. Rahaim, J. Carruthers, and T.D.C. Little Department of Electrical and Computer Engineering Boston University, Boston,
Accelerated Impulse Response Calculation for Indoor Optical Communication Channels M. Rahaim, J. Carruthers, and T.D.C. Little Department of Electrical and Computer Engineering Boston University, Boston,
Fujitsu, SMU, and A*STAR collaborate on traffic management technologies with the Maritime and Port Authority of Singapore
 Fujitsu Limited Agency for Science, Technology and Research (A*STAR) Singapore Management University April 16, 2018 Fujitsu, SMU, and A*STAR collaborate on traffic management technologies with the Maritime
Fujitsu Limited Agency for Science, Technology and Research (A*STAR) Singapore Management University April 16, 2018 Fujitsu, SMU, and A*STAR collaborate on traffic management technologies with the Maritime
T E Wellington House, Wellington Street, Leeds LS1 2DE
 The Urban Transport Group brings together public sector transport authorities in the UK s largest urban areas. Our members aim to support sustainable and inclusive economic growth by promoting, planning
The Urban Transport Group brings together public sector transport authorities in the UK s largest urban areas. Our members aim to support sustainable and inclusive economic growth by promoting, planning
On-demand high-capacity ride-sharing via dynamic trip-vehicle assignment - Supplemental Material -
 On-demand high-capacity ride-sharing via dynamic trip-vehicle assignment - Supplemental Material - Javier Alonso-Mora, Samitha Samaranayake, Alex Wallar, Emilio Frazzoli and Daniela Rus Abstract Ride sharing
On-demand high-capacity ride-sharing via dynamic trip-vehicle assignment - Supplemental Material - Javier Alonso-Mora, Samitha Samaranayake, Alex Wallar, Emilio Frazzoli and Daniela Rus Abstract Ride sharing
Dynamic Model-Based Filtering for Mobile Terminal Location Estimation
 1012 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 52, NO. 4, JULY 2003 Dynamic Model-Based Filtering for Mobile Terminal Location Estimation Michael McGuire, Member, IEEE, and Konstantinos N. Plataniotis,
1012 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 52, NO. 4, JULY 2003 Dynamic Model-Based Filtering for Mobile Terminal Location Estimation Michael McGuire, Member, IEEE, and Konstantinos N. Plataniotis,
V2X-Locate Positioning System Whitepaper
 V2X-Locate Positioning System Whitepaper November 8, 2017 www.cohdawireless.com 1 Introduction The most important piece of information any autonomous system must know is its position in the world. This
V2X-Locate Positioning System Whitepaper November 8, 2017 www.cohdawireless.com 1 Introduction The most important piece of information any autonomous system must know is its position in the world. This
RHODES: a real-time traffic adaptive signal control system
 RHODES: a real-time traffic adaptive signal control system 1 Contents Introduction of RHODES RHODES Architecture The prediction methods Control Algorithms Integrated Transit Priority and Rail/Emergency
RHODES: a real-time traffic adaptive signal control system 1 Contents Introduction of RHODES RHODES Architecture The prediction methods Control Algorithms Integrated Transit Priority and Rail/Emergency
A Reconfigurable Citizen Observatory Platform for the Brussels Capital Region. by Jesse Zaman
 1 A Reconfigurable Citizen Observatory Platform for the Brussels Capital Region by Jesse Zaman 2 Key messages Today s citizen observatories are beyond the reach of most societal stakeholder groups. A generic
1 A Reconfigurable Citizen Observatory Platform for the Brussels Capital Region by Jesse Zaman 2 Key messages Today s citizen observatories are beyond the reach of most societal stakeholder groups. A generic
OVERVIEW OF ARTIFICIAL INTELLIGENCE (AI) TECHNOLOGIES. Presented by: WTI
 TECHNOLOGIES. Presented by: WTI") OVERVIEW OF ARTIFICIAL INTELLIGENCE (AI) TECHNOLOGIES Presented by: WTI www.wti-solutions.com 703.286.2416 LEGAL DISCLAIMER The entire contents of this informational publication is protected by the copyright
OVERVIEW OF ARTIFICIAL INTELLIGENCE (AI) TECHNOLOGIES Presented by: WTI www.wti-solutions.com 703.286.2416 LEGAL DISCLAIMER The entire contents of this informational publication is protected by the copyright
Real Time Traffic Light Control System Using Image Processing
 Real Time Traffic Light Control System Using Image Processing Darshan J #1, Siddhesh L. #2, Hitesh B. #3, Pratik S.#4 Department of Electronics and Telecommunications Student of KC College Of Engineering
Real Time Traffic Light Control System Using Image Processing Darshan J #1, Siddhesh L. #2, Hitesh B. #3, Pratik S.#4 Department of Electronics and Telecommunications Student of KC College Of Engineering
A REACTIVE DRIVING AGENT FOR MICROSCOPIC TRAFFIC SIMULATION
 A REACTIVE DRIVING AGENT FOR MICROSCOPIC TRAFFIC SIMULATION Patrick A.M. Ehlert and Leon J.M. Rothkrantz Knowledge Based Systems Group Department of Information Technology and Systems Delft University
A REACTIVE DRIVING AGENT FOR MICROSCOPIC TRAFFIC SIMULATION Patrick A.M. Ehlert and Leon J.M. Rothkrantz Knowledge Based Systems Group Department of Information Technology and Systems Delft University
CISC 1600 Lecture 3.4 Agent-based programming
 CISC 1600 Lecture 3.4 Agent-based programming Topics: Agents and environments Rationality Performance, Environment, Actuators, Sensors Four basic types of agents Multi-agent systems NetLogo Agents interact
CISC 1600 Lecture 3.4 Agent-based programming Topics: Agents and environments Rationality Performance, Environment, Actuators, Sensors Four basic types of agents Multi-agent systems NetLogo Agents interact
Microscopic traffic simulation with reactive driving agents
 2001 IEEE Intelligent Transportation Systems Conference Proceedings - Oakland (CA) USA = August 25-29, 2001 Microscopic traffic simulation with reactive driving agents Patrick A.M.Ehlert and Leon J.M.Rothkrantz,
2001 IEEE Intelligent Transportation Systems Conference Proceedings - Oakland (CA) USA = August 25-29, 2001 Microscopic traffic simulation with reactive driving agents Patrick A.M.Ehlert and Leon J.M.Rothkrantz,
Information for Parents/Carers Targets in Computing
 Computing Targets - A Year 1 Computer User I can create a series of instructions. I can plan a journey for a programmable toy. I can create digital content. I can store digital content. I can retrieve
Computing Targets - A Year 1 Computer User I can create a series of instructions. I can plan a journey for a programmable toy. I can create digital content. I can store digital content. I can retrieve
Frequently Asked Questions
 The Synchro Studio support site is available for users to submit questions regarding any of our software products. Our goal is to respond to questions (Monday - Friday) within a 24-hour period. Most questions
The Synchro Studio support site is available for users to submit questions regarding any of our software products. Our goal is to respond to questions (Monday - Friday) within a 24-hour period. Most questions
Visual Traffic Simulation
 Visual Traffic Simulation Thomas Fotherby June 2002 Individual Project Final Report MEng Computing Degree Supervisor: Jeff Magee Second Marker: Susan Eisenbach Department of Computing Imperial College
Visual Traffic Simulation Thomas Fotherby June 2002 Individual Project Final Report MEng Computing Degree Supervisor: Jeff Magee Second Marker: Susan Eisenbach Department of Computing Imperial College
Interfacing ACT-R with External Simulations
 Interfacing ACT-R with External Simulations Eric Biefeld, Brad Best, Christian Lebiere Human-Computer Interaction Institute Carnegie Mellon University We Have Integrated ACT-R With Several External Simulations
Interfacing ACT-R with External Simulations Eric Biefeld, Brad Best, Christian Lebiere Human-Computer Interaction Institute Carnegie Mellon University We Have Integrated ACT-R With Several External Simulations
H2020 RIA COMANOID H2020-RIA
 Ref. Ares(2016)2533586-01/06/2016 H2020 RIA COMANOID H2020-RIA-645097 Deliverable D4.1: Demonstrator specification report M6 D4.1 H2020-RIA-645097 COMANOID M6 Project acronym: Project full title: COMANOID
Ref. Ares(2016)2533586-01/06/2016 H2020 RIA COMANOID H2020-RIA-645097 Deliverable D4.1: Demonstrator specification report M6 D4.1 H2020-RIA-645097 COMANOID M6 Project acronym: Project full title: COMANOID
Guido Cantelmo Prof. Francesco Viti. Practical methods for Dynamic Demand Estimation in congested Networks
 Guido Cantelmo Prof. Francesco Viti MobiLab Transport Research Group Faculty of Sciences, Technology and Communication, Practical methods for Dynamic Demand Estimation in congested Networks University
Guido Cantelmo Prof. Francesco Viti MobiLab Transport Research Group Faculty of Sciences, Technology and Communication, Practical methods for Dynamic Demand Estimation in congested Networks University
From Communication to Traffic Self-Organization in VANETs
 From Communication to Traffic Self-Organization in VANETs Gianluigi Ferrari, 1 Stefano Busanelli, 1 Nicola Iotti 2 1 WASN Lab, Dept. of Information Eng., UniParma, Italy 2 Guglielmo Srl, Pilastro (Parma),
From Communication to Traffic Self-Organization in VANETs Gianluigi Ferrari, 1 Stefano Busanelli, 1 Nicola Iotti 2 1 WASN Lab, Dept. of Information Eng., UniParma, Italy 2 Guglielmo Srl, Pilastro (Parma),
DYNAMIC ODME FOR AUTOMATED VEHICLES MODELING USING BIG DATA
 DYNAMIC ODME FOR AUTOMATED VEHICLES MODELING USING BIG DATA Dr. Jaume Barceló, Professor Emeritus, UPC- Barcelona Tech, Strategic Advisor to PTV Group Shaleen Srivastava, Vice-President/Regional Director
DYNAMIC ODME FOR AUTOMATED VEHICLES MODELING USING BIG DATA Dr. Jaume Barceló, Professor Emeritus, UPC- Barcelona Tech, Strategic Advisor to PTV Group Shaleen Srivastava, Vice-President/Regional Director
Benchmarking Intelligent Service Robots through Scientific Competitions: the approach. Luca Iocchi. Sapienza University of Rome, Italy
 Benchmarking Intelligent Service Robots through Scientific Competitions: the RoboCup@Home approach Luca Iocchi Sapienza University of Rome, Italy Motivation Benchmarking Domestic Service Robots Complex
Benchmarking Intelligent Service Robots through Scientific Competitions: the RoboCup@Home approach Luca Iocchi Sapienza University of Rome, Italy Motivation Benchmarking Domestic Service Robots Complex
Engineering at a Games Company: What do we do?
 Engineering at a Games Company: What do we do? Dan White Technical Director Pipeworks October 17, 2018 The Role of Engineering at a Games Company Empower game designers and artists to realize their visions
Engineering at a Games Company: What do we do? Dan White Technical Director Pipeworks October 17, 2018 The Role of Engineering at a Games Company Empower game designers and artists to realize their visions
Our Aspirations Ahead
 Our Aspirations Ahead ~ Pursuing Smart Innovation ~ 1 Introduction For the past decade, under our corporate philosophy Creating a New Communication Culture, and the vision MAGIC, NTT DOCOMO Group has been
Our Aspirations Ahead ~ Pursuing Smart Innovation ~ 1 Introduction For the past decade, under our corporate philosophy Creating a New Communication Culture, and the vision MAGIC, NTT DOCOMO Group has been
Application of Maxwell Equations to Human Body Modelling
 Application of Maxwell Equations to Human Body Modelling Fumie Costen Room E, E0c at Sackville Street Building, fc@cs.man.ac.uk The University of Manchester, U.K. February 5, 0 Fumie Costen Room E, E0c
Application of Maxwell Equations to Human Body Modelling Fumie Costen Room E, E0c at Sackville Street Building, fc@cs.man.ac.uk The University of Manchester, U.K. February 5, 0 Fumie Costen Room E, E0c
Horizon 2020 ICT Robotics Work Programme (draft - Publication: 20 October 2015)
") NCP TRAINING BRUSSELS 07 OCTOBER 2015 1 Horizon 2020 ICT Robotics Work Programme 2016 2017 (draft - Publication: 20 October 2015) Cécile Huet Deputy Head of Unit Robotics Directorate General for Communication
NCP TRAINING BRUSSELS 07 OCTOBER 2015 1 Horizon 2020 ICT Robotics Work Programme 2016 2017 (draft - Publication: 20 October 2015) Cécile Huet Deputy Head of Unit Robotics Directorate General for Communication
Automatic Routing of Traffic Signaling using Image Processing
 ISSN 2348 2370 Vol.09,Issue.05, April-2017, Pages:0670-0674 www.ijatir.org Automatic Routing of Traffic Signaling using Image Processing CH. PRIYANKA 1, R. V. CH. SEKHAR RAO 2, M. AMRUTHA 3, M. CHANDRASEKHAR
ISSN 2348 2370 Vol.09,Issue.05, April-2017, Pages:0670-0674 www.ijatir.org Automatic Routing of Traffic Signaling using Image Processing CH. PRIYANKA 1, R. V. CH. SEKHAR RAO 2, M. AMRUTHA 3, M. CHANDRASEKHAR
Designing A Human Vehicle Interface For An Intelligent Community Vehicle
 Designing A Human Vehicle Interface For An Intelligent Community Vehicle Kin Kok Lee, Yong Tsui Lee and Ming Xie School of Mechanical & Production Engineering Nanyang Technological University Nanyang Avenue
Designing A Human Vehicle Interface For An Intelligent Community Vehicle Kin Kok Lee, Yong Tsui Lee and Ming Xie School of Mechanical & Production Engineering Nanyang Technological University Nanyang Avenue
NEDO s Activities in the Robotics and Artificial Intelligence Fields
 NEDO s Activities in the Robotics and Artificial Intelligence Fields November 29, 2017 Dr. Shuji Yumitori Director General, Robot and Artificial Intelligence Technology Department New Energy and Industrial
NEDO s Activities in the Robotics and Artificial Intelligence Fields November 29, 2017 Dr. Shuji Yumitori Director General, Robot and Artificial Intelligence Technology Department New Energy and Industrial
Mobile & Enterprise Computing (MEC)/ SocialCars Research Training Group
/ SocialCars Research Training Group") Mobile & Enterprise Computing (MEC)/ SocialCars Research Training Group Prof. Dr. Jörg P. Müller TU Clausthal joerg.mueller@tu-clausthal.de meclab.in.tu-clausthal.de www.socialcars.org Mobile & Enterprise
Mobile & Enterprise Computing (MEC)/ SocialCars Research Training Group Prof. Dr. Jörg P. Müller TU Clausthal joerg.mueller@tu-clausthal.de meclab.in.tu-clausthal.de www.socialcars.org Mobile & Enterprise
Keeping digital human: the challenges and opportunities of transforming UK s public services for a fully digital future
 Keeping digital human: the challenges and opportunities of transforming UK s public services for a fully digital future Authors Nathan Marsh Director, Digital Transformation Rebecca Mosedale Principal
Keeping digital human: the challenges and opportunities of transforming UK s public services for a fully digital future Authors Nathan Marsh Director, Digital Transformation Rebecca Mosedale Principal
Model-based Design of Coordinated Traffic Controllers
 Model-based Design of Coordinated Traffic Controllers Roopak Sinha a, Partha Roop b, Prakash Ranjitkar c, Junbo Zeng d, Xingchen Zhu e a Lecturer, b,c Senior Lecturer, d,e Student a,b,c,d,e Faculty of
Model-based Design of Coordinated Traffic Controllers Roopak Sinha a, Partha Roop b, Prakash Ranjitkar c, Junbo Zeng d, Xingchen Zhu e a Lecturer, b,c Senior Lecturer, d,e Student a,b,c,d,e Faculty of
AN AUTONOMOUS SIMULATION BASED SYSTEM FOR ROBOTIC SERVICES IN PARTIALLY KNOWN ENVIRONMENTS
 AN AUTONOMOUS SIMULATION BASED SYSTEM FOR ROBOTIC SERVICES IN PARTIALLY KNOWN ENVIRONMENTS Eva Cipi, PhD in Computer Engineering University of Vlora, Albania Abstract This paper is focused on presenting
AN AUTONOMOUS SIMULATION BASED SYSTEM FOR ROBOTIC SERVICES IN PARTIALLY KNOWN ENVIRONMENTS Eva Cipi, PhD in Computer Engineering University of Vlora, Albania Abstract This paper is focused on presenting
1) Complexity, Emergence & CA (sb) 2) Fractals and L-systems (sb) 3) Multi-agent systems (vg) 4) Swarm intelligence (vg) 5) Artificial evolution (vg)
 Complexity, Emergence & CA (sb) 2) Fractals and L-systems (sb) 3) Multi-agent systems (vg) 4) Swarm intelligence (vg) 5) Artificial evolution (vg)") 1) Complexity, Emergence & CA (sb) 2) Fractals and L-systems (sb) 3) Multi-agent systems (vg) 4) Swarm intelligence (vg) 5) Artificial evolution (vg) 6) Virtual Ecosystems & Perspectives (sb) Inspired
1) Complexity, Emergence & CA (sb) 2) Fractals and L-systems (sb) 3) Multi-agent systems (vg) 4) Swarm intelligence (vg) 5) Artificial evolution (vg) 6) Virtual Ecosystems & Perspectives (sb) Inspired