RHODES: a real-time traffic adaptive signal control system
|
|
|
- Imogene Byrd
- 5 years ago
- Views:
Transcription

1 RHODES: a real-time traffic adaptive signal control system 1
2 Contents Introduction of RHODES RHODES Architecture The prediction methods Control Algorithms Integrated Transit Priority and Rail/Emergency Preemption The RHODES prototype 2
3 What is RHODES? ROHODES = Real-time Hierarchical Optimizing Distributed Effective System Developed by a research team at the University of Arizona Arizona DOT and FHWA have provided research funding to assist in the exploration of RHODES concepts. 3

4 RHODES General Idea Network Level Intersection Level 4
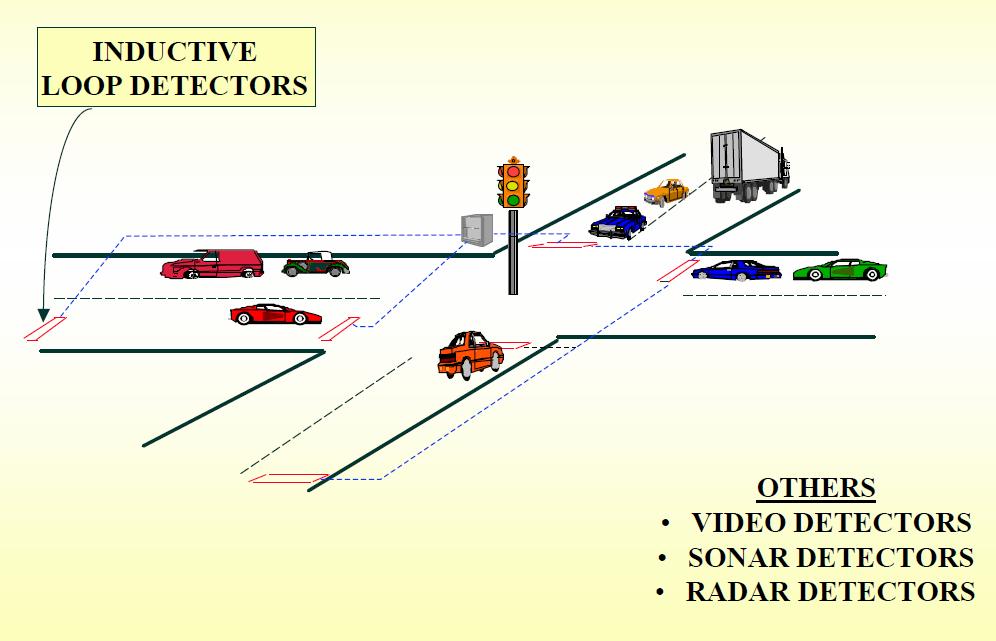
5 Sensors 5
6 RHODES Architecture RHODES uses three-level hierarchy for characterizing and managing traffic. RHODES explicitly predicts traffic at these levels utilizing detector and other sensor information. RHODES requires (a) lane traffic data (e.g., through detectorization) (b) real-time communication to/from processors, and (c) PC-level computational capability. 6
7 RHODES: Logical Architecture The highest level is a dynamic network loading model that captures the slow-varying characteristics, which pertain to the network geometry and the typical route selection of travelers. Based on the traffic load on each particular link, RHODES allocate green time for each demand pattern and each phase. These decisions are made at the middle level of the hierarchy, referred as Network flow control. Given the approximate green times, the intersection control at the third level selects the appropriate phase change epochs based on observed and predicted arrivals of individual vehicles at each intersection. 7
8 RHODES: Logical Architecture At each level, there is an estimation/prediction component and a control component. 8

9 Simplified Architecture 9
10 Prediction of Intersection Arrivals The PREDICT algorithm (Head,1995) used the output of the detectors on the approach of each upstream intersection. The prediction assumes that the arrival process can be divided into two parts: a predictable part and an unpredictable part: nt () = n () t + n() t p u The contribution of unpredictable part will influence the control strategy at intersection. For example, if the process is highly predictable, the control strategy could be to allow platoon progression; if the process is highly unpredictable, then the control strategy could be to gather arrivals into platoons that can be accommodated at downstream intersection. 10
11 Prediction of Intersection Arrivals For example: to predict the flow approaching intersection A at detector da. Making this prediction is important because it is a point on Link AB where the actual flow can be measured, hence the quality of the prediction can be assessed in real-time. 11
12 Prediction of Intersection Arrivals Several factors affect when and if the vehicle will arrive at da: Travel time from di (i=l,t,r) to the stop bar at the intersection B; Delay due to an existing queue at B; Delay due to the traffic signal at B; Travel time between B and da and Probability that the vehicle will travel along a route that includes location da. 12
13 Prediction of Intersection Arrivals Associated with the first four factors, the following figures depict the delay of different scenarios: 13
14 Prediction of Intersection Arrivals Figure (a): the vehicle arrives at detector di and passes freely to detector da. The arrival time is given by: t = t + T + T a d d, S S, d i i B B A Arrival time at A = arrival time at di + travel time (di to Stop line of Intersection B) + travel time (stop line of Intersection B to da) 14
15 Prediction of Intersection Arrivals Figure (b): the vehicle arrives at detector di and is delayed by the signal at intersection B. The arrival time is given by: t = t + max{ T, T } + T a d d, S u S, d i i B B B A Arrival time at A = arrival time at di + max of {travel time of di to B, signal delay} + travel time (stop line of Intersection B to da) 15
16 Prediction of Intersection Arrivals Figure (c): the vehicle arrives at detector di and encounters delay for the signal as ell as a standing queue. The arrival time is given by: t = t + max{ T, T + T } + T a d d, S u q S, d i i B B i B A Arrival time at A = arrival time at di + max of {travel time of di to B, signal delay + queue delay} + travel time (stop line of Intersection B to da) and T = a + an q i 0 1 q i Where a0 and a1 are parameters that can be selected on each intersection and Nq is the number of vehicle in queue. 16
17 Prediction of Intersection Arrivals Figure (d): the vehicle arrives at detector di occurs after the signal has begun serving the desired phase, but a standing queue is present. The arrival time is given by: t = t + max{ T, T } + T a d d, S q S, d i i B i B A Arrival time at A = arrival time at di + + max of {travel time of di to B, queue delay} + travel time (stop line of Intersection B to da) 17
 depends on signal & departure rates 18")
18 Note: To estimate Queues Q(t+1)=Q(t)+a(t)-d(t) a(t) count from a passage detector d(t) depends on signal & departure rates 18
19 Prediction of Intersection Arrivals Given the estimate of the predicted arrival time, an arrival BA event at detector A can be anticipated with probability. p i The probability reflects the uncertainty that vehicle crossing the upstream detector i will actually travel on a route that will cross the detector at A. Then the expected number of arrivals at A can be predicted to be: n ( t BA ) p n ( t ) = A da i t i i p p 19
20 Estimation of parameters Observe that to use the PREDICT model, three parameters need to be provided: (1) travel times on links (detector to detector) which depends on the link free-flow speed and current traffic volume (2) queue discharge rate which also depends on volumes (3) turning probabilities. 20

21 Estimation of parameters 21
22 Turning Ratio Estimation 1. Based on Dynamic OD Estimation 2. Short Time (5 minutes) 3. Traffic Counts by Phases 4. Lanes and Geometry Dependent 5. Uses a Generalized Least Square 22

23 Travel Time Estimation 1. Based on Platoon Identification 2. By measuring Platoon Departure and Arrival Times 23
24 Discharge Rate Estimation Through-traffic queue discharge rates are effected by downstream through-traffic volumes, which can be easily measured. Left-turn queue discharge rates depend on opposing traffic volumes Right turn queue discharge rates depend on crosstraffic in that direction. These three discharge rates are initially given from calculated, but are then adjusted based on how well they predict remaining queues at the stop-bar presence detectors. 24
25 Intersection Control Logic RHODES uses a dynamic-programming (DP) based algorithm Effectively, the algorithm determines: - for a given phase order: A,B,C,D,A,B,C,D - what time durations should be given to Phase A, Phase B,, etc. -Considers a given decision time horizon T, with time increments of 1 sec. 25
26 Introduction of DP Dynamic Programming is a method for solving complex problems by breaking them down into simpler subproblems. The key idea is to solve different parts of subproblems and then combine the solutions to reach an overall solution. The DP approach seeks to solve each subproblem only once, thus reducing the number of computations. 26
27 Introduction of DP DP usually refers to simplifying a decision by breaking it down into a sequence of decision steps over time. This is done by defining a sequence of value function V1, V2,,Vn with an argument y representing the state of system. Vn(y) is the value obtained in state y at the last time n. The value of Vi at earlier times i = n-1,n-1,,1 can be found by working backwards, using a recursive relationship. The more detail of DP could be found in the reading materials. 27
28 The DP Algorithm in RHODES Decision variable: Xj (phase duration of stage j) Optimization state variable: Sj (time horizon with stage j) Incremental Value of Objective Function: f(sj, Xj) Cumulative Value of Objective Function: Vj-1(Sj-1) V ( s ) = min{ f( s, x ) + V ( s ) x X } j j j j j 1 j+ 1 j j 28
29 The DP Algorithm in RHODES Allow various objectives: stops, delays, queues Implementable in real-time Easily accommodates operational constraints: - minimum green times - fixed/variable phase sequence Note: If it is variable phase sequence, then the DP algorithm allows to skip phase by allocating zero time for the corresponding stage. 29

30 Summarizing Intersection Control Decision-Making 30

31 Network Flow Control & Intersection Control 31
32 Network Control APRES-NET: model for predicting the flow of platoons and evaluating the performance of each platoon conflict. REALBAND: Builds a binary decision tree for platoon conflicts. 32
33 Network flow prediction Propagate platoons by APRES-NET Note: this example would be used for further discussion. Figure 1 33


34 REALBAND (Network control) REALBAND identifies platoons and predicts their movement in the network by fusing and filtering the traffic data obtained in the last few minutes. Fixed green time Variable green time MAXBAND Concept REALBAND Concept 34
35 REALBAND principle The signals are set so that the predicted platoons are provided appropriate green times to optimize a given performance criterion. If two platoons demanding conflicting movements arrive at an intersection at the same time, then either one or the other will be given priority for green time, or one of them is split to maximize the given measure of performance. 35
36 REALBAND principle REALBAND makes a forward pass in time. When a conflict arises a decision node in a tree is formed, the types of decisions at this node include: (a) give green time to Platoon A (b) give green time to Platoon B (c) split Platoon A (or B). 36
37 Decision tree for the example Performance (Delay) Stop platoon N At intersection Stop platoon S At intersection 3 Figure 4 Stop platoon W2 At intersection Split platoon N At intersection 3 Figure 3 Stop platoon E3 At intersection 3 Stop platoon N At intersection Figure 5 Figure 1 Stop platoon W2 At intersection Stop platoon W3 At intersection 3 Stop platoon S At intersection Optimal Figure 6 Figure 2 Stop platoon E3 At intersection
38 Illustrates of the Decision Tree Node Figure 1: Propagate platoons by APRES-NET 38

39 Illustrates of the Decision Tree Node Figure 2:Stop platoon W3 at intersection 3 39
40 Illustrates of the Decision Tree Node Figure 3: Split platoon N at intersection 3 40
41 Illustrates of the Decision Tree Node Figure 4: Stop platoon S at intersection 3 41
42 Illustrates of the Decision Tree Node Figure 5: Stop platoon E3 at intersection 3 42

43 Illustrates of the Decision Tree Node Figure 6: Stop platoon S at intersection 3 43
44 Measure of Performance The measure of performance is completed by APRES-NET model. APRES-NET model is a simplified traffic simulation model based on the same principles as the PREDICT model Compared with PREDICT model, APRES-NET propagates platoons of vehicles through a subnetwork instead of a signal vehicle. 44
45 Flow Chart of REALBAND T=To Historical Data APRES-NET Flow Estimator/ Predictor Detected data until To Initial signal plan over decision horizon Platoon Identifier Next Conflict Resolution, at Time T New Phases Signal setting from To to T No T=Thorizon New Signal Plan Choose new Initial Signal Plan Not Good Evaluation Good 45

46 Transit/bus Priority 46
47 Transit/bus Priority In the intersection control strategy, each vehicle is treated alike by the dynamic program, and that is, they all have a identical weight of unity. For the bus priority control, RHODES gives each bus a variable weight that depends on the number of passengers and on how late is the bus. 47
48 Transit/bus Priority Then weight wi for bus i given to RHODES was defined by the function: w = n (1 + f ) where delay factor f i i i i 0 if lateness di 0 = Kdi if lateness di > 0, where K is some constant ni is the number of passengers on bus i. With the inclusion of the bus passengers and the bus lateness in the computation of the objective function value, RHODES will tend to give higher priority for late buses with many passengers. 48

49 Emergency Vehicles 49
50 Emergency Vehicles Sometimes, emergency vehicles, such as ambulances, fir trucks are equipped with transponders that allow them to preempt signals in their route. In this case, the signals get preempted when there is a line of sight from the response unit to the signal heads and, once preempted, the signals transition into the required phase as quickly as possible. Emergency preemptions therefore result in considerable disruption of traffic patterns and add delays to other vehicles. 50
51 Emergency Vehicles RHODES/CAPRI system allows to: (1) compute a real-time dynamic shortest path from emergency vehicles origin to destination; (2) advise the responding unit of the path; and (3) schedule the signal phasing so that an emergency pathway is provided to the response unit while the resulting delays of other vehicles are minimized. Also, the RHODES/CAPRI system will know when the emergency vehicle will be at an intersection, will constrain the phase to be green for the responding unit, and use DP to schedule the remaining phases to minimize delay for the predicted vehicle arrivals. Effectively, the emergency vehicle is treated as a platoon on a specified route, and CAPRI computes the needed phase timings. 51

52 Rail/Train Preemption 52
53 Rail/Train Preemption At the highway-rail intersections, trains always have right of way; that is trains preempt the signals at grade crossings so that trains get a green phase while vehicles get a red phase. Research dealing with traffic management for at-grade railway crossing has had essentially two objective: (1) to reduce the risk of incidents at highway-rail intersections and (2) to minimize vehicular travel times across these intersections and prevent excessive wait times or bottlenecks. 53
54 Rail/Train Preemption Given the predicted preemption of the signals at the grade crossing, PHODES/CAPRI could schedule the phases in the neighborhood of the rail-highway intersection so that predicted and detected vehicles can go more efficiently. PHODES treats the train as a predicted platoon where the signals at the intersections have a constrained red phase for arriving and waiting vehicles during the predicted train crossing. 54
55 RHODES prototype To summery, the PHODES prototype logic consist of five modules: (1) Intersection Optimization Logic (2) Link Flow Prediction Logic (3) Network Flow Optimization Logic (4) Platoon Flow Prediction Logic (5) Parameter and State Estimation Logic 55
56 RHODES prototype 56
57 References Introductions and Reports Head, K.L., P. B. Mirchandani, and D. Shepherd A hierarchical framework for real-time traffic control. Transportation Research Record National Research Council,Washington, D.C. p K. Larry Head, Pitu B. Mirchandani, and Steve Shelby. The RHODES prototype: a description and some results. Presented as 77 th Annual Meeting of the Transportation Research Board Pitu Mirchandani, Larry Head. RHODES: A Real-time Traffic Signal Control System: Architecture, Algorithms and Analaysis Pitu Michandani, Fei Yue Wang. Rhodes to Intelligent Transportation System. Intelligent Systems, IEEE, Larry Head, Pitu Mirchandani. RHODES-ITMS. Report: Sponsored by Arizona DOT. AZ-SP Head Larry, Pitu Mirchandani. Final Report RHODES Projects: Phase II (A). Report FHWA-AZ Arizona DOT. 57
58 References Algorithms Mirchandani, P., and L. Head. A Real-Time Traffic Signal Control System: Architecture, Algorithms, and Analysis. Transportation Research Part C, Vol. 9, No. 6, 2001, pp Head, K.L An event-based short-term traffic flow prediction model. Transportation Research Record National Research Council, Washington, D.C. p Mirchandani, P.B., K. L. Head, A. Knyazyan, and W. Wu An approach towards the integration of bus priority, traffic adaptive signal control and bus information/scheduling system. Paper presented at the 8th International Conference on Computer-Aided Scheduling of Public Transportation at Berlin, Germany. Pitu B. Mirchandani and David E. Lucas. Integrated Transit Priority and Rail/Emergency Preepmption in Real-Time Traffic Adaptive Signal Control. Intelligent Transportation System, 8: , Paolo Dell Olmo and P B Mirchandani. Realband: An Approach for Real Time Coordination of Traffic Flows on Networks. Transportation Research Record
Next Generation of Adaptive Traffic Signal Control
 Next Generation of Adaptive Traffic Signal Control Pitu Mirchandani ATLAS Research Laboratory Arizona State University NSF Workshop Rutgers, New Brunswick, NJ June 7, 2010 Acknowledgements: FHWA, ADOT,
Next Generation of Adaptive Traffic Signal Control Pitu Mirchandani ATLAS Research Laboratory Arizona State University NSF Workshop Rutgers, New Brunswick, NJ June 7, 2010 Acknowledgements: FHWA, ADOT,
A Fuzzy Signal Controller for Isolated Intersections
 1741741741741749 Journal of Uncertain Systems Vol.3, No.3, pp.174-182, 2009 Online at: www.jus.org.uk A Fuzzy Signal Controller for Isolated Intersections Mohammad Hossein Fazel Zarandi, Shabnam Rezapour
1741741741741749 Journal of Uncertain Systems Vol.3, No.3, pp.174-182, 2009 Online at: www.jus.org.uk A Fuzzy Signal Controller for Isolated Intersections Mohammad Hossein Fazel Zarandi, Shabnam Rezapour
Methodology to Assess Traffic Signal Transition Strategies. Employed to Exit Preemption Control
 Methodology to Assess Traffic Signal Transition Strategies Employed to Exit Preemption Control Jon T. Obenberger Dissertation submitted to the faculty of the Virginia Polytechnic Institute and State University
Methodology to Assess Traffic Signal Transition Strategies Employed to Exit Preemption Control Jon T. Obenberger Dissertation submitted to the faculty of the Virginia Polytechnic Institute and State University
Preemption Versus Priority
 Port 1 MMU Preemption Versus Priority BIU Why Interrupt a Signalized Intersection There are several reasons to interrupt a signalized intersection from the normal operation of assigning right-of-way. Some
Port 1 MMU Preemption Versus Priority BIU Why Interrupt a Signalized Intersection There are several reasons to interrupt a signalized intersection from the normal operation of assigning right-of-way. Some
Validation Plan: Mitchell Hammock Road. Adaptive Traffic Signal Control System. Prepared by: City of Oviedo. Draft 1: June 2015
 Plan: Mitchell Hammock Road Adaptive Traffic Signal Control System Red Bug Lake Road from Slavia Road to SR 426 Mitchell Hammock Road from SR 426 to Lockwood Boulevard Lockwood Boulevard from Mitchell
Plan: Mitchell Hammock Road Adaptive Traffic Signal Control System Red Bug Lake Road from Slavia Road to SR 426 Mitchell Hammock Road from SR 426 to Lockwood Boulevard Lockwood Boulevard from Mitchell
MOBILITY RESEARCH NEEDS FROM THE GOVERNMENT PERSPECTIVE
 MOBILITY RESEARCH NEEDS FROM THE GOVERNMENT PERSPECTIVE First Annual 2018 National Mobility Summit of US DOT University Transportation Centers (UTC) April 12, 2018 Washington, DC Research Areas Cooperative
MOBILITY RESEARCH NEEDS FROM THE GOVERNMENT PERSPECTIVE First Annual 2018 National Mobility Summit of US DOT University Transportation Centers (UTC) April 12, 2018 Washington, DC Research Areas Cooperative
SOUND: A Traffic Simulation Model for Oversaturated Traffic Flow on Urban Expressways
 SOUND: A Traffic Simulation Model for Oversaturated Traffic Flow on Urban Expressways Toshio Yoshii 1) and Masao Kuwahara 2) 1: Research Assistant 2: Associate Professor Institute of Industrial Science,
SOUND: A Traffic Simulation Model for Oversaturated Traffic Flow on Urban Expressways Toshio Yoshii 1) and Masao Kuwahara 2) 1: Research Assistant 2: Associate Professor Institute of Industrial Science,
Keywords- Fuzzy Logic, Fuzzy Variables, Traffic Control, Membership Functions and Fuzzy Rule Base.
 Volume 6, Issue 12, December 2016 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com Fuzzy Logic
Volume 6, Issue 12, December 2016 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com Fuzzy Logic
Route-based Dynamic Preemption of Traffic Signals for Emergency Vehicle Operations
 Route-based Dynamic Preemption of Traffic Signals for Emergency Vehicle Operations Eil Kwon, Ph.D. Center for Transportation Studies, University of Minnesota 511 Washington Ave. S.E., Minneapolis, MN 55455
Route-based Dynamic Preemption of Traffic Signals for Emergency Vehicle Operations Eil Kwon, Ph.D. Center for Transportation Studies, University of Minnesota 511 Washington Ave. S.E., Minneapolis, MN 55455
Highway-Rail Preemption
 Highway-Rail Preemption Preemption can be defined as the transfer of normal operation of traffic signals to a special control mode through establishing wired connection between the traffic signal and the
Highway-Rail Preemption Preemption can be defined as the transfer of normal operation of traffic signals to a special control mode through establishing wired connection between the traffic signal and the
Connected Car Networking
 Connected Car Networking Teng Yang, Francis Wolff and Christos Papachristou Electrical Engineering and Computer Science Case Western Reserve University Cleveland, Ohio Outline Motivation Connected Car
Connected Car Networking Teng Yang, Francis Wolff and Christos Papachristou Electrical Engineering and Computer Science Case Western Reserve University Cleveland, Ohio Outline Motivation Connected Car
Area Traffic Control System (ATCS)
") Area Traffic Control System (ATCS) 1. Introduction: Area Traffic Control System is an indigenous solution for Indian Road Traffic, which optimizes traffic signal, covering a set of roads for an area in
Area Traffic Control System (ATCS) 1. Introduction: Area Traffic Control System is an indigenous solution for Indian Road Traffic, which optimizes traffic signal, covering a set of roads for an area in
A Three-Tier Communication and Control Structure for the Distributed Simulation of an Automated Highway System *
 A Three-Tier Communication and Control Structure for the Distributed Simulation of an Automated Highway System * R. Maarfi, E. L. Brown and S. Ramaswamy Software Automation and Intelligence Laboratory,
A Three-Tier Communication and Control Structure for the Distributed Simulation of an Automated Highway System * R. Maarfi, E. L. Brown and S. Ramaswamy Software Automation and Intelligence Laboratory,
Applicability of Adaptive Traffic Control Systems in Nevada s Urban Areas
 NDOT Research Report Report No. 92-9-83 Applicability of Adaptive Traffic Control Systems in Nevada s Urban Areas March 211 Nevada Department of Transportation 1263 South Stewart Street Carson City, NV
NDOT Research Report Report No. 92-9-83 Applicability of Adaptive Traffic Control Systems in Nevada s Urban Areas March 211 Nevada Department of Transportation 1263 South Stewart Street Carson City, NV
Signal Patterns for Improving Light Rail Operation By Wintana Miller and Mark Madden DKS Associates
 Signal Patterns for Improving Light Rail Operation By Wintana Miller and Mark Madden DKS Associates Abstract This paper describes the follow up to a pilot project to coordinate traffic signals with light
Signal Patterns for Improving Light Rail Operation By Wintana Miller and Mark Madden DKS Associates Abstract This paper describes the follow up to a pilot project to coordinate traffic signals with light
Area Traffic Control
 Area Traffic Control Lecture Notes in Transportation Systems Engineering Prof. Tom V. Mathew 1 Introduction ATC systems are intelligent real-time dynamic traffic control systems which are designed to effectively
Area Traffic Control Lecture Notes in Transportation Systems Engineering Prof. Tom V. Mathew 1 Introduction ATC systems are intelligent real-time dynamic traffic control systems which are designed to effectively
Deployment and Testing of Optimized Autonomous and Connected Vehicle Trajectories at a Closed- Course Signalized Intersection
 Deployment and Testing of Optimized Autonomous and Connected Vehicle Trajectories at a Closed- Course Signalized Intersection Clark Letter*, Lily Elefteriadou, Mahmoud Pourmehrab, Aschkan Omidvar Civil
Deployment and Testing of Optimized Autonomous and Connected Vehicle Trajectories at a Closed- Course Signalized Intersection Clark Letter*, Lily Elefteriadou, Mahmoud Pourmehrab, Aschkan Omidvar Civil
DEVELOPMENT AND EVALUATION OF AN ARTERIAL ADAPTIVE TRAFFIC SIGNAL CONTROL SYSTEM USING REINFORCEMENT LEARNING. A Dissertation YUANCHANG XIE
 DEVELOPMENT AND EVALUATION OF AN ARTERIAL ADAPTIVE TRAFFIC SIGNAL CONTROL SYSTEM USING REINFORCEMENT LEARNING A Dissertation by YUANCHANG XIE Submitted to the Office of Graduate Studies of Texas A&M University
DEVELOPMENT AND EVALUATION OF AN ARTERIAL ADAPTIVE TRAFFIC SIGNAL CONTROL SYSTEM USING REINFORCEMENT LEARNING A Dissertation by YUANCHANG XIE Submitted to the Office of Graduate Studies of Texas A&M University
Self-Scheduling Agents for Real-Time Traffic Signal Control
 Self-Scheduling Agents for Real-Time Traffic Signal Control Xaio-Feng Xie, Gregory J. Barlow, Stephen F. Smith and Zachary B. Rubinstein The Robotics Institute Carnegie Mellon University 5000 Forbes Avenue
Self-Scheduling Agents for Real-Time Traffic Signal Control Xaio-Feng Xie, Gregory J. Barlow, Stephen F. Smith and Zachary B. Rubinstein The Robotics Institute Carnegie Mellon University 5000 Forbes Avenue
USDOT Region V Regional University Transportation Center Final Report. NEXTRANS Project No. 110PUY2.1
 MN WI MI IL IN OH USDOT Region V Regional University Transportation Center Final Report NEXTRANS Project No. 110PUY2.1 Estimation of Time-Dependent Intersection Turning Proportions for Adaptive Traffic
MN WI MI IL IN OH USDOT Region V Regional University Transportation Center Final Report NEXTRANS Project No. 110PUY2.1 Estimation of Time-Dependent Intersection Turning Proportions for Adaptive Traffic
Georgia Department of Transportation. Automated Traffic Signal Performance Measures Reporting Details
 Georgia Department of Transportation Automated Traffic Signal Performance Measures Prepared for: Georgia Department of Transportation 600 West Peachtree Street, NW Atlanta, Georgia 30308 Prepared by: Atkins
Georgia Department of Transportation Automated Traffic Signal Performance Measures Prepared for: Georgia Department of Transportation 600 West Peachtree Street, NW Atlanta, Georgia 30308 Prepared by: Atkins
Real Time Traffic Light Control System Using Image Processing
 Real Time Traffic Light Control System Using Image Processing Darshan J #1, Siddhesh L. #2, Hitesh B. #3, Pratik S.#4 Department of Electronics and Telecommunications Student of KC College Of Engineering
Real Time Traffic Light Control System Using Image Processing Darshan J #1, Siddhesh L. #2, Hitesh B. #3, Pratik S.#4 Department of Electronics and Telecommunications Student of KC College Of Engineering
Transportation Timetabling
 Outline DM87 SCHEDULING, TIMETABLING AND ROUTING 1. Sports Timetabling Lecture 16 Transportation Timetabling Marco Chiarandini 2. Transportation Timetabling Tanker Scheduling Air Transport Train Timetabling
Outline DM87 SCHEDULING, TIMETABLING AND ROUTING 1. Sports Timetabling Lecture 16 Transportation Timetabling Marco Chiarandini 2. Transportation Timetabling Tanker Scheduling Air Transport Train Timetabling
Look-ahead traffic adaptive control of a single intersection A taxonomy and a new hybrid algorithm
 Delft University of Technology Delft Center for Systems and Control Technical report 06-039 Look-ahead traffic adaptive control of a single intersection A taxonomy and a new hybrid algorithm R. van Katwijk,
Delft University of Technology Delft Center for Systems and Control Technical report 06-039 Look-ahead traffic adaptive control of a single intersection A taxonomy and a new hybrid algorithm R. van Katwijk,
Arterial Traffic Signal Optimization: A Person-based Approach
 Paper No. 13-3395 Arterial Traffic Signal Optimization: A Person-based Approach Eleni Christofa, Ph.D. corresponding author Department of Civil and Environmental Engineering University of Massachusetts
Paper No. 13-3395 Arterial Traffic Signal Optimization: A Person-based Approach Eleni Christofa, Ph.D. corresponding author Department of Civil and Environmental Engineering University of Massachusetts
City of Surrey Adaptive Signal Control Pilot Project
 City of Surrey Adaptive Signal Control Pilot Project ITS Canada Annual Conference and General Meeting May 29 th, 2013 1 2 ASCT Pilot Project Background ASCT Pilot Project Background 25 Major Traffic Corridors
City of Surrey Adaptive Signal Control Pilot Project ITS Canada Annual Conference and General Meeting May 29 th, 2013 1 2 ASCT Pilot Project Background ASCT Pilot Project Background 25 Major Traffic Corridors
Available online at ScienceDirect. Procedia Engineering 142 (2016 )
") Available online at www.sciencedirect.com ScienceDirect Procedia Engineering (0 ) Sustainable Development of Civil, Urban and Transportation Engineering Conference Methods for Designing Signalized Double-Intersections
Available online at www.sciencedirect.com ScienceDirect Procedia Engineering (0 ) Sustainable Development of Civil, Urban and Transportation Engineering Conference Methods for Designing Signalized Double-Intersections
Self-Organizing Traffic Signals for Arterial Control
 Self-Organizing Traffic Signals for Arterial Control A Dissertation Presented by Burak Cesme to The Department of Civil and Environmental Engineering in partial fulfillment of the requirements for the
Self-Organizing Traffic Signals for Arterial Control A Dissertation Presented by Burak Cesme to The Department of Civil and Environmental Engineering in partial fulfillment of the requirements for the
Chapter 39. Vehicle Actuated Signals Introduction Vehicle-Actuated Signals Basic Principles
 Chapter 39 Vehicle Actuated Signals 39.1 Introduction Now-a-days, controlling traffic congestion relies on having an efficient and well-managed traffic signal control policy. Traffic signals operate in
Chapter 39 Vehicle Actuated Signals 39.1 Introduction Now-a-days, controlling traffic congestion relies on having an efficient and well-managed traffic signal control policy. Traffic signals operate in
Utilization-Aware Adaptive Back-Pressure Traffic Signal Control
 Utilization-Aware Adaptive Back-Pressure Traffic Signal Control Wanli Chang, Samarjit Chakraborty and Anuradha Annaswamy Abstract Back-pressure control of traffic signal, which computes the control phase
Utilization-Aware Adaptive Back-Pressure Traffic Signal Control Wanli Chang, Samarjit Chakraborty and Anuradha Annaswamy Abstract Back-pressure control of traffic signal, which computes the control phase
Bus Travel Time Prediction Model for Dynamic Operations Control and Passenger Information Systems
 November 15, 2002 Bus Travel Time Prediction Model for Dynamic Operations Control and Passenger Information Systems Amer Shalaby, Ph.D., P.Eng. Assistant Professor, Department of Civil Engineering University
November 15, 2002 Bus Travel Time Prediction Model for Dynamic Operations Control and Passenger Information Systems Amer Shalaby, Ph.D., P.Eng. Assistant Professor, Department of Civil Engineering University
Urban Traffic Bottleneck Identification Based on Congestion Propagation
 Urban Traffic Bottleneck Identification Based on Congestion Propagation Wenwei Yue, Changle Li, Senior Member, IEEE and Guoqiang Mao, Fellow, IEEE State Key Laboratory of Integrated Services Networks,
Urban Traffic Bottleneck Identification Based on Congestion Propagation Wenwei Yue, Changle Li, Senior Member, IEEE and Guoqiang Mao, Fellow, IEEE State Key Laboratory of Integrated Services Networks,
True Adaptive Signal Control A Comparison of Alternatives Technical Paper #1154
 1 Smart Information for a Sustainable World True Adaptive Signal Control A Comparison of Alternatives Technical Paper #1154 Presentation to the 18 th World Congress on Intelligent Transport Systems Technical
1 Smart Information for a Sustainable World True Adaptive Signal Control A Comparison of Alternatives Technical Paper #1154 Presentation to the 18 th World Congress on Intelligent Transport Systems Technical
An Optimization Approach for Real Time Evacuation Reroute. Planning
 An Optimization Approach for Real Time Evacuation Reroute Planning Gino J. Lim and M. Reza Baharnemati and Seon Jin Kim November 16, 2015 Abstract This paper addresses evacuation route management in the
An Optimization Approach for Real Time Evacuation Reroute Planning Gino J. Lim and M. Reza Baharnemati and Seon Jin Kim November 16, 2015 Abstract This paper addresses evacuation route management in the
Modeling Connectivity of Inter-Vehicle Communication Systems with Road-Side Stations
 Modeling Connectivity of Inter-Vehicle Communication Systems with Road-Side Stations Wen-Long Jin* and Hong-Jun Wang Department of Automation, University of Science and Technology of China, P.R. China
Modeling Connectivity of Inter-Vehicle Communication Systems with Road-Side Stations Wen-Long Jin* and Hong-Jun Wang Department of Automation, University of Science and Technology of China, P.R. China
IMPROVEMENTS TO A QUEUE AND DELAY ESTIMATION ALGORITHM UTILIZED IN VIDEO IMAGING VEHICLE DETECTION SYSTEMS
 IMPROVEMENTS TO A QUEUE AND DELAY ESTIMATION ALGORITHM UTILIZED IN VIDEO IMAGING VEHICLE DETECTION SYSTEMS A Thesis Proposal By Marshall T. Cheek Submitted to the Office of Graduate Studies Texas A&M University
IMPROVEMENTS TO A QUEUE AND DELAY ESTIMATION ALGORITHM UTILIZED IN VIDEO IMAGING VEHICLE DETECTION SYSTEMS A Thesis Proposal By Marshall T. Cheek Submitted to the Office of Graduate Studies Texas A&M University
Fast Detour Computation for Ride Sharing
 Fast Detour Computation for Ride Sharing Robert Geisberger, Dennis Luxen, Sabine Neubauer, Peter Sanders, Lars Volker Universität Karlsruhe (TH), 76128 Karlsruhe, Germany {geisberger,luxen,sanders}@ira.uka.de;
Fast Detour Computation for Ride Sharing Robert Geisberger, Dennis Luxen, Sabine Neubauer, Peter Sanders, Lars Volker Universität Karlsruhe (TH), 76128 Karlsruhe, Germany {geisberger,luxen,sanders}@ira.uka.de;
Improving method of real-time offset tuning for arterial signal coordination using probe trajectory data
 Special Issue Article Improving method of real-time offset tuning for arterial signal coordination using probe trajectory data Advances in Mechanical Engineering 2017, Vol. 9(1) 1 7 Ó The Author(s) 2017
Special Issue Article Improving method of real-time offset tuning for arterial signal coordination using probe trajectory data Advances in Mechanical Engineering 2017, Vol. 9(1) 1 7 Ó The Author(s) 2017
Traffic Signal Timing Coordination. Innovation for better mobility
 Traffic Signal Timing Coordination Pre-Timed Signals All phases have a MAX recall placed on them. How do they work All phases do not have detection so they are not allowed to GAP out All cycles are a consistent
Traffic Signal Timing Coordination Pre-Timed Signals All phases have a MAX recall placed on them. How do they work All phases do not have detection so they are not allowed to GAP out All cycles are a consistent
TRAFFIC SIGNAL CONTROL WITH ANT COLONY OPTIMIZATION. A Thesis presented to the Faculty of California Polytechnic State University, San Luis Obispo
 TRAFFIC SIGNAL CONTROL WITH ANT COLONY OPTIMIZATION A Thesis presented to the Faculty of California Polytechnic State University, San Luis Obispo In Partial Fulfillment of the Requirements for the Degree
TRAFFIC SIGNAL CONTROL WITH ANT COLONY OPTIMIZATION A Thesis presented to the Faculty of California Polytechnic State University, San Luis Obispo In Partial Fulfillment of the Requirements for the Degree
Railway disruption management
 Railway disruption management 4 5 6 7 8 Delft Center for Systems and Control Railway disruption management For the degree of Master of Science in Systems and Control at Delft University of Technology
Railway disruption management 4 5 6 7 8 Delft Center for Systems and Control Railway disruption management For the degree of Master of Science in Systems and Control at Delft University of Technology
Development and Evaluation of Lane-by-Lane Gap-out Based Actuated Traffic Signal Control
 Development and Evaluation of Lane-by-Lane Gap-out Based Actuated Traffic Signal Control Pennsylvania State University University of Maryland University of Virginia Virginia Polytechnic Institute and State
Development and Evaluation of Lane-by-Lane Gap-out Based Actuated Traffic Signal Control Pennsylvania State University University of Maryland University of Virginia Virginia Polytechnic Institute and State
Presented by: Hesham Rakha, Ph.D., P. Eng.
 Developing Intersection Cooperative Adaptive Cruise Control System Applications Presented by: Hesham Rakha, Ph.D., P. Eng. Director, Center for Sustainable Mobility at Professor, Charles E. Via, Jr. Dept.
Developing Intersection Cooperative Adaptive Cruise Control System Applications Presented by: Hesham Rakha, Ph.D., P. Eng. Director, Center for Sustainable Mobility at Professor, Charles E. Via, Jr. Dept.
Infrastructure Aided Networking and Traffic Management for Autonomous Transportation
 1 Infrastructure Aided Networking and Traffic Management for Autonomous Transportation Yu-Yu Lin and Izhak Rubin Electrical Engineering Department, UCLA, Los Angeles, CA, USA Email: yuyu@seas.ucla.edu,
1 Infrastructure Aided Networking and Traffic Management for Autonomous Transportation Yu-Yu Lin and Izhak Rubin Electrical Engineering Department, UCLA, Los Angeles, CA, USA Email: yuyu@seas.ucla.edu,
WHITE PAPER BENEFITS OF OPTICOM GPS. Upgrading from Infrared to GPS Emergency Vehicle Preemption GLOB A L TRAFFIC TE CHNOLOGIE S
 WHITE PAPER BENEFITS OF OPTICOM GPS Upgrading from Infrared to GPS Emergency Vehicle Preemption GLOB A L TRAFFIC TE CHNOLOGIE S 2 CONTENTS Overview 3 Operation 4 Advantages of Opticom GPS 5 Opticom GPS
WHITE PAPER BENEFITS OF OPTICOM GPS Upgrading from Infrared to GPS Emergency Vehicle Preemption GLOB A L TRAFFIC TE CHNOLOGIE S 2 CONTENTS Overview 3 Operation 4 Advantages of Opticom GPS 5 Opticom GPS
Appendix Traffic Engineering Checklist - How to Complete. (Refer to Template Section for Word Format Document)
") Appendix 400.1 Traffic Engineering Checklist - How to Complete (Refer to Template Section for Word Format Document) Traffic Engineering Checksheet How to Complete the Form June 2003 Version 3 Maintained
Appendix 400.1 Traffic Engineering Checklist - How to Complete (Refer to Template Section for Word Format Document) Traffic Engineering Checksheet How to Complete the Form June 2003 Version 3 Maintained
Link and Link Impedance 2018/02/13. VECTOR DATA ANALYSIS Network Analysis TYPES OF OPERATIONS
 VECTOR DATA ANALYSIS Network Analysis A network is a system of linear features that has the appropriate attributes for the flow of objects. A network is typically topology-based: lines (arcs) meet at intersections
VECTOR DATA ANALYSIS Network Analysis A network is a system of linear features that has the appropriate attributes for the flow of objects. A network is typically topology-based: lines (arcs) meet at intersections
Context Aware Dynamic Traffic Signal Optimization
 Context Aware Dynamic Traffic Signal Optimization Kandarp Khandwala VESIT, University of Mumbai Mumbai, India kandarpck@gmail.com Rudra Sharma VESIT, University of Mumbai Mumbai, India rudrsharma@gmail.com
Context Aware Dynamic Traffic Signal Optimization Kandarp Khandwala VESIT, University of Mumbai Mumbai, India kandarpck@gmail.com Rudra Sharma VESIT, University of Mumbai Mumbai, India rudrsharma@gmail.com
A Three-Tier Communication and Control Structure for the Distributed Simulation of an Automated Highway System *
 A Three-Tier Communication and Control Structure for the Distributed Simulation of an Automated Highway System * R. Maarfi, E. L. Brown and S. Ramaswamy Software Automation and Intelligence Laboratory,
A Three-Tier Communication and Control Structure for the Distributed Simulation of an Automated Highway System * R. Maarfi, E. L. Brown and S. Ramaswamy Software Automation and Intelligence Laboratory,
Model-based Design of Coordinated Traffic Controllers
 Model-based Design of Coordinated Traffic Controllers Roopak Sinha a, Partha Roop b, Prakash Ranjitkar c, Junbo Zeng d, Xingchen Zhu e a Lecturer, b,c Senior Lecturer, d,e Student a,b,c,d,e Faculty of
Model-based Design of Coordinated Traffic Controllers Roopak Sinha a, Partha Roop b, Prakash Ranjitkar c, Junbo Zeng d, Xingchen Zhu e a Lecturer, b,c Senior Lecturer, d,e Student a,b,c,d,e Faculty of
Real-Time Identification and Tracking of Traffic Queues Based on Average Link Speed
 Paper No. 03-3351 Real-Time Identification and Tracking of Traffic Queues Based on Average Link Speed T. Nixon Chan M.A.Sc. Candidate Department of Civil Engineering, University of Waterloo 200 University
Paper No. 03-3351 Real-Time Identification and Tracking of Traffic Queues Based on Average Link Speed T. Nixon Chan M.A.Sc. Candidate Department of Civil Engineering, University of Waterloo 200 University
Core Input Files + Engines. Node/Link/Activity Location Demand Type/ Vehicle Type VOT Table/ Emission Table. DTALite. Movement Capacity File
 Module'1:'Introduction'to'NEXTA/DTALite:'(10AM:10:30'AM)' Twosoftwareapplications:NEXTAasGUIanddatahub;DTALiteasDTAsimulationengine 32_bitvs.64_bit:32_bitforGISshapefileimportingandlegacysupport;64_bitforlargenetwork:(e.g.
Module'1:'Introduction'to'NEXTA/DTALite:'(10AM:10:30'AM)' Twosoftwareapplications:NEXTAasGUIanddatahub;DTALiteasDTAsimulationengine 32_bitvs.64_bit:32_bitforGISshapefileimportingandlegacysupport;64_bitforlargenetwork:(e.g.
Agenda. TS2 Cabinet Components and Operation. Understanding a Signal Plan Maccarone. Basic Preemption/Priority
 Morning Traffic Terminology TS2 Cabinet Components and Operation Traffic Signal Phasing Ring Structure Traffic Signal Timing Understanding a Signal Plan Maccarone Controller Programming Afternoon Basic
Morning Traffic Terminology TS2 Cabinet Components and Operation Traffic Signal Phasing Ring Structure Traffic Signal Timing Understanding a Signal Plan Maccarone Controller Programming Afternoon Basic
Density Based Traffic Control with Emergency Override
 National conference on Engineering Innovations and Solutions (NCEIS 2018) International Journal of Scientific Research in Computer Science, Engineering and Information Technology 2018 IJSRCSEIT Volume
National conference on Engineering Innovations and Solutions (NCEIS 2018) International Journal of Scientific Research in Computer Science, Engineering and Information Technology 2018 IJSRCSEIT Volume
A Backlog-Based CSMA Mechanism to Achieve Fairness and Throughput-Optimality in Multihop Wireless Networks
 A Backlog-Based CSMA Mechanism to Achieve Fairness and Throughput-Optimality in Multihop Wireless Networks Peter Marbach, and Atilla Eryilmaz Dept. of Computer Science, University of Toronto Email: marbach@cs.toronto.edu
A Backlog-Based CSMA Mechanism to Achieve Fairness and Throughput-Optimality in Multihop Wireless Networks Peter Marbach, and Atilla Eryilmaz Dept. of Computer Science, University of Toronto Email: marbach@cs.toronto.edu
RECOMMENDATION ITU-R M.1310* TRANSPORT INFORMATION AND CONTROL SYSTEMS (TICS) OBJECTIVES AND REQUIREMENTS (Question ITU-R 205/8)
 OBJECTIVES AND REQUIREMENTS (Question ITU-R 205/8)") Rec. ITU-R M.1310 1 RECOMMENDATION ITU-R M.1310* TRANSPORT INFORMATION AND CONTROL SYSTEMS (TICS) OBJECTIVES AND REQUIREMENTS (Question ITU-R 205/8) Rec. ITU-R M.1310 (1997) Summary This Recommendation
Rec. ITU-R M.1310 1 RECOMMENDATION ITU-R M.1310* TRANSPORT INFORMATION AND CONTROL SYSTEMS (TICS) OBJECTIVES AND REQUIREMENTS (Question ITU-R 205/8) Rec. ITU-R M.1310 (1997) Summary This Recommendation
Connected Vehicles and Maintenance Operations
 Connected Vehicles and Maintenance Operations Presentation to AASHTO SCOM Dean Deeter Athey Creek Consultants Topics Connected Vehicle Priorities Survey Results Connected Vehicle Applications Related to
Connected Vehicles and Maintenance Operations Presentation to AASHTO SCOM Dean Deeter Athey Creek Consultants Topics Connected Vehicle Priorities Survey Results Connected Vehicle Applications Related to
Some Observed Queue Discharge Features at a Freeway Bottleneck Downstream of a Merge
 Some Observed Queue Discharge Features at a Freeway Bottleneck Downstream of a Merge Robert L. Bertini Portland State University Department of Civil Engineering P.O. Box 751 Portland, OR 9727-751 (53)
Some Observed Queue Discharge Features at a Freeway Bottleneck Downstream of a Merge Robert L. Bertini Portland State University Department of Civil Engineering P.O. Box 751 Portland, OR 9727-751 (53)
3644 IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. 57, NO. 6, JUNE 2011
 3644 IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. 57, NO. 6, JUNE 2011 Asynchronous CSMA Policies in Multihop Wireless Networks With Primary Interference Constraints Peter Marbach, Member, IEEE, Atilla
3644 IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. 57, NO. 6, JUNE 2011 Asynchronous CSMA Policies in Multihop Wireless Networks With Primary Interference Constraints Peter Marbach, Member, IEEE, Atilla
Israel Railways No Fault Liability Renewal The Implementation of New Technological Safety Devices at Level Crossings. Amos Gellert, Nataly Kats
 Mr. Amos Gellert Technological aspects of level crossing facilities Israel Railways No Fault Liability Renewal The Implementation of New Technological Safety Devices at Level Crossings Deputy General Manager
Mr. Amos Gellert Technological aspects of level crossing facilities Israel Railways No Fault Liability Renewal The Implementation of New Technological Safety Devices at Level Crossings Deputy General Manager
0-6920: PROACTIVE TRAFFIC SIGNAL TIMING AND COORDINATION FOR CONGESTION MITIGATION ON ARTERIAL ROADS. TxDOT Houston District
 0-6920: PROACTIVE TRAFFIC SIGNAL TIMING AND COORDINATION FOR CONGESTION MITIGATION ON ARTERIAL ROADS TxDOT Houston District October 10, 2017 PI: XING WU, PHD, PE CO-PI: HAO YANG, PHD DEPT. OF CIVIL & ENVIRONMENTAL
0-6920: PROACTIVE TRAFFIC SIGNAL TIMING AND COORDINATION FOR CONGESTION MITIGATION ON ARTERIAL ROADS TxDOT Houston District October 10, 2017 PI: XING WU, PHD, PE CO-PI: HAO YANG, PHD DEPT. OF CIVIL & ENVIRONMENTAL
ISSN: ISO 9001:2008 Certified International Journal of Engineering and Innovative Technology (IJEIT) Volume 4, Issue 11, May 2015
 Volume 4, Issue 11, May 2015") Field Programmable Gate Array Based Intelligent Traffic Light System Agho Osarenomase, Faisal Sani Bala, Ganiyu Bakare Department of Electrical and Electronics Engineering, Faculty of Engineering, Abubakar
Field Programmable Gate Array Based Intelligent Traffic Light System Agho Osarenomase, Faisal Sani Bala, Ganiyu Bakare Department of Electrical and Electronics Engineering, Faculty of Engineering, Abubakar
ARTIFICIAL IMMUNE SYSTEM BASED URBAN TRAFFIC CONTROL. A Thesis PALLAV NEGI
 ARTIFICIAL IMMUNE SYSTEM BASED URBAN TRAFFIC CONTROL A Thesis by PALLAV NEGI Submitted to the Office of Graduate Studies of Texas A&M University in partial fulfillment of the requirements for the degree
ARTIFICIAL IMMUNE SYSTEM BASED URBAN TRAFFIC CONTROL A Thesis by PALLAV NEGI Submitted to the Office of Graduate Studies of Texas A&M University in partial fulfillment of the requirements for the degree
Eric J. Nava Department of Civil Engineering and Engineering Mechanics, University of Arizona,
 A Temporal Domain Decomposition Algorithmic Scheme for Efficient Mega-Scale Dynamic Traffic Assignment An Experience with Southern California Associations of Government (SCAG) DTA Model Yi-Chang Chiu 1
A Temporal Domain Decomposition Algorithmic Scheme for Efficient Mega-Scale Dynamic Traffic Assignment An Experience with Southern California Associations of Government (SCAG) DTA Model Yi-Chang Chiu 1
Visualisation of Traffic Behaviour Using Computer Simulation Models
 Journal of Maps ISSN: (Print) 1744-5647 (Online) Journal homepage: http://www.tandfonline.com/loi/tjom20 Visualisation of Traffic Behaviour Using Computer Simulation Models Joerg M. Tonndorf & Vladimir
Journal of Maps ISSN: (Print) 1744-5647 (Online) Journal homepage: http://www.tandfonline.com/loi/tjom20 Visualisation of Traffic Behaviour Using Computer Simulation Models Joerg M. Tonndorf & Vladimir
Scheduling. Radek Mařík. April 28, 2015 FEE CTU, K Radek Mařík Scheduling April 28, / 48
 Scheduling Radek Mařík FEE CTU, K13132 April 28, 2015 Radek Mařík (marikr@fel.cvut.cz) Scheduling April 28, 2015 1 / 48 Outline 1 Introduction to Scheduling Methodology Overview 2 Classification of Scheduling
Scheduling Radek Mařík FEE CTU, K13132 April 28, 2015 Radek Mařík (marikr@fel.cvut.cz) Scheduling April 28, 2015 1 / 48 Outline 1 Introduction to Scheduling Methodology Overview 2 Classification of Scheduling
Advanced Techniques for Mobile Robotics Location-Based Activity Recognition
 Advanced Techniques for Mobile Robotics Location-Based Activity Recognition Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz Activity Recognition Based on L. Liao, D. J. Patterson, D. Fox,
Advanced Techniques for Mobile Robotics Location-Based Activity Recognition Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz Activity Recognition Based on L. Liao, D. J. Patterson, D. Fox,
Dallas Area Rapid Transit (DART) Traffic Signal Priority (TSP) Project
 Traffic Signal Priority (TSP) Project") Dallas Area Rapid Transit (DART) Traffic Signal Priority (TSP) Project Allan Steele VP/CIO APTA TransITech February 2010 Content About DART The Challenge TSP Goals System Overview TSP Operation Current
Dallas Area Rapid Transit (DART) Traffic Signal Priority (TSP) Project Allan Steele VP/CIO APTA TransITech February 2010 Content About DART The Challenge TSP Goals System Overview TSP Operation Current
Study of Location Management for Next Generation Personal Communication Networks
 Study of Location Management for Next Generation Personal Communication Networks TEERAPAT SANGUANKOTCHAKORN and PANUVIT WIBULLANON Telecommunications Field of Study School of Advanced Technologies Asian
Study of Location Management for Next Generation Personal Communication Networks TEERAPAT SANGUANKOTCHAKORN and PANUVIT WIBULLANON Telecommunications Field of Study School of Advanced Technologies Asian
PHASE ONE PROJECT REPORT
 MOORHEAD AREA INTEGRATED TRAIN DETECTION AND TRAFFIC CONTROL SYSTEM PHASE ONE PROJECT REPORT December 2000 Prepared for: Minnesota Department of Transportation Office of Advanced Transportation Systems
MOORHEAD AREA INTEGRATED TRAIN DETECTION AND TRAFFIC CONTROL SYSTEM PHASE ONE PROJECT REPORT December 2000 Prepared for: Minnesota Department of Transportation Office of Advanced Transportation Systems
Constructing a Traffic Control Process Diagram
 22 Constructing a Traffic Control Process Diagram The purpose of this assignment is to help you improve your understanding of the operation of an actuated traffic controller system by studying eight cases
22 Constructing a Traffic Control Process Diagram The purpose of this assignment is to help you improve your understanding of the operation of an actuated traffic controller system by studying eight cases
CONCURRENT OPTIMIZATION OF SIGNAL PROGRESSION AND CROSSOVER SPACING FOR DIVERGING DIAMOND INTERCHANGES
 CONCURRENT OPTIMIZATION OF SIGNAL PROGRESSION AND CROSSOVER SPACING FOR DIVERGING DIAMOND INTERCHANGES Yao Cheng*, Saed Rahwanji, Gang-Len Chang MDOT State Highway Administration University of Maryland,
CONCURRENT OPTIMIZATION OF SIGNAL PROGRESSION AND CROSSOVER SPACING FOR DIVERGING DIAMOND INTERCHANGES Yao Cheng*, Saed Rahwanji, Gang-Len Chang MDOT State Highway Administration University of Maryland,
Opportunistic Communications under Energy & Delay Constraints
 Opportunistic Communications under Energy & Delay Constraints Narayan Mandayam (joint work with Henry Wang) Opportunistic Communications Wireless Data on the Move Intermittent Connectivity Opportunities
Opportunistic Communications under Energy & Delay Constraints Narayan Mandayam (joint work with Henry Wang) Opportunistic Communications Wireless Data on the Move Intermittent Connectivity Opportunities
Mini Project 3: GT Evacuation Simulation
 Vanarase & Tuchez 1 Shreyyas Vanarase Christian Tuchez CX 4230 Computer Simulation Prof. Vuduc Part A: Conceptual Model Introduction Mini Project 3: GT Evacuation Simulation Agent based models and queuing
Vanarase & Tuchez 1 Shreyyas Vanarase Christian Tuchez CX 4230 Computer Simulation Prof. Vuduc Part A: Conceptual Model Introduction Mini Project 3: GT Evacuation Simulation Agent based models and queuing
On the design and efficient implementation of the Farrow structure. Citation Ieee Signal Processing Letters, 2003, v. 10 n. 7, p.
 Title On the design and efficient implementation of the Farrow structure Author(s) Pun, CKS; Wu, YC; Chan, SC; Ho, KL Citation Ieee Signal Processing Letters, 2003, v. 10 n. 7, p. 189-192 Issued Date 2003
Title On the design and efficient implementation of the Farrow structure Author(s) Pun, CKS; Wu, YC; Chan, SC; Ho, KL Citation Ieee Signal Processing Letters, 2003, v. 10 n. 7, p. 189-192 Issued Date 2003
I-85 Integrated Corridor Management. Jennifer Portanova, PE, CPM Sreekanth Sunny Nandagiri, PE, PMP
 Jennifer Portanova, PE, CPM Sreekanth Sunny Nandagiri, PE, PMP SDITE Meeting, Columbia, SC March 2017 Agenda The I-85 ICM project in Charlotte will serve as a model to deploy similar strategies throughout
Jennifer Portanova, PE, CPM Sreekanth Sunny Nandagiri, PE, PMP SDITE Meeting, Columbia, SC March 2017 Agenda The I-85 ICM project in Charlotte will serve as a model to deploy similar strategies throughout
20. Security Classif.(of this page) Unclassified
 Unclassified") 1. Report No. FHWA/TX-10/0-6029-1 4. Title and Subtitle IMPROVED INTERSECTION OPERATIONS DURING DETECTOR FAILURES Technical Report Documentation Page 2. Government Accession No. 3. Recipient's Catalog
1. Report No. FHWA/TX-10/0-6029-1 4. Title and Subtitle IMPROVED INTERSECTION OPERATIONS DURING DETECTOR FAILURES Technical Report Documentation Page 2. Government Accession No. 3. Recipient's Catalog
Aimsun Next User's Manual
 Aimsun Next User's Manual 1. A quick guide to the new features available in Aimsun Next 8.3 1. Introduction 2. Aimsun Next 8.3 Highlights 3. Outputs 4. Traffic management 5. Microscopic simulator 6. Mesoscopic
Aimsun Next User's Manual 1. A quick guide to the new features available in Aimsun Next 8.3 1. Introduction 2. Aimsun Next 8.3 Highlights 3. Outputs 4. Traffic management 5. Microscopic simulator 6. Mesoscopic
DESIGN OF VEHICLE ACTUATED SIGNAL FOR A MAJOR CORRIDOR IN CHENNAI USING SIMULATION
 DESIGN OF VEHICLE ACTUATED SIGNAL FOR A MAJOR CORRIDOR IN CHENNAI USING SIMULATION Presented by, R.NITHYANANTHAN S. KALAANIDHI Authors S.NITHYA R.NITHYANANTHAN D.SENTHURKUMAR K.GUNASEKARAN Introduction
DESIGN OF VEHICLE ACTUATED SIGNAL FOR A MAJOR CORRIDOR IN CHENNAI USING SIMULATION Presented by, R.NITHYANANTHAN S. KALAANIDHI Authors S.NITHYA R.NITHYANANTHAN D.SENTHURKUMAR K.GUNASEKARAN Introduction
AN0503 Using swarm bee LE for Collision Avoidance Systems (CAS)
") AN0503 Using swarm bee LE for Collision Avoidance Systems (CAS) 1.3 NA-14-0267-0019-1.3 Document Information Document Title: Document Version: 1.3 Current Date: 2016-05-18 Print Date: 2016-05-18 Document
AN0503 Using swarm bee LE for Collision Avoidance Systems (CAS) 1.3 NA-14-0267-0019-1.3 Document Information Document Title: Document Version: 1.3 Current Date: 2016-05-18 Print Date: 2016-05-18 Document
CONNECTED VEHICLE-TO-INFRASTRUCTURE INITATIVES
 CONNECTED VEHICLE-TO-INFRASTRUCTURE INITATIVES Arizona ITE March 3, 2016 Faisal Saleem ITS Branch Manager & MCDOT SMARTDrive Program Manager Maricopa County Department of Transportation ONE SYSTEM MULTIPLE
CONNECTED VEHICLE-TO-INFRASTRUCTURE INITATIVES Arizona ITE March 3, 2016 Faisal Saleem ITS Branch Manager & MCDOT SMARTDrive Program Manager Maricopa County Department of Transportation ONE SYSTEM MULTIPLE
Advanced Traffic Signal Control System Installed in Phuket City, Kingdom of Thailand
 INFORMATION & COMMUNICATION SYSTEMS Advanced Traffic Signal Control System Installed in Phuket City, Kingdom of Thailand Hajime SAKAKIBARA, Masanori AOKI and Hiroshi MATSUMOTO Along with the economic development,
INFORMATION & COMMUNICATION SYSTEMS Advanced Traffic Signal Control System Installed in Phuket City, Kingdom of Thailand Hajime SAKAKIBARA, Masanori AOKI and Hiroshi MATSUMOTO Along with the economic development,
Aircraft routing for on-demand air transportation with service upgrade and maintenance events: compact model and case study
 Aircraft routing for on-demand air transportation with service upgrade and maintenance events: compact model and case study Pedro Munari, Aldair Alvarez Production Engineering Department, Federal University
Aircraft routing for on-demand air transportation with service upgrade and maintenance events: compact model and case study Pedro Munari, Aldair Alvarez Production Engineering Department, Federal University
Frequently Asked Questions
 The Synchro Studio support site is available for users to submit questions regarding any of our software products. Our goal is to respond to questions (Monday - Friday) within a 24-hour period. Most questions
The Synchro Studio support site is available for users to submit questions regarding any of our software products. Our goal is to respond to questions (Monday - Friday) within a 24-hour period. Most questions
Connected Vehicle Based Traffic Signal Optimization. April 2018
 Connected Vehicle Based Traffic Signal Optimization April 2018 C2SMART Center is a USDOT Tier 1 University Transportation Center taking on some of today s most pressing urban mobility challenges. Using
Connected Vehicle Based Traffic Signal Optimization April 2018 C2SMART Center is a USDOT Tier 1 University Transportation Center taking on some of today s most pressing urban mobility challenges. Using
TRB Workshop on the Future of Road Vehicle Automation
 TRB Workshop on the Future of Road Vehicle Automation Steven E. Shladover University of California PATH Program ITFVHA Meeting, Vienna October 21, 2012 1 Outline TRB background Workshop organization Automation
TRB Workshop on the Future of Road Vehicle Automation Steven E. Shladover University of California PATH Program ITFVHA Meeting, Vienna October 21, 2012 1 Outline TRB background Workshop organization Automation
arxiv: v1 [cs.sy] 28 Sep 2018
![arxiv: v1 [cs.sy] 28 Sep 2018](/thumbs/87/96219790.jpg "arxiv: v1 [cs.sy] 28 Sep 2018") A hierarchical cellular automaton model of distributed traffic signal control Bartłomiej Płaczek arxiv:1809.10892v1 [cs.sy] 28 Sep 2018 Institute of Computer Science, University of Silesia, Katowice, Poland
A hierarchical cellular automaton model of distributed traffic signal control Bartłomiej Płaczek arxiv:1809.10892v1 [cs.sy] 28 Sep 2018 Institute of Computer Science, University of Silesia, Katowice, Poland
University of Nevada, Reno. Pedestrian Crossing Caused Signal Transition Study
 University of Nevada, Reno Pedestrian Crossing Caused Signal Transition Study A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science in Civil and Environmental
University of Nevada, Reno Pedestrian Crossing Caused Signal Transition Study A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science in Civil and Environmental
16.2 DIGITAL-TO-ANALOG CONVERSION
 240 16. DC MEASUREMENTS In the context of contemporary instrumentation systems, a digital meter measures a voltage or current by performing an analog-to-digital (A/D) conversion. A/D converters produce
240 16. DC MEASUREMENTS In the context of contemporary instrumentation systems, a digital meter measures a voltage or current by performing an analog-to-digital (A/D) conversion. A/D converters produce
Morphological Image Processing Approach of Vehicle Detection for Real-Time Traffic Analysis
 Morphological Image Processing Approach of Vehicle Detection for Real-Time Traffic Analysis Prutha Y M *1, Department Of Computer Science and Engineering Affiliated to VTU Belgaum, Karnataka Rao Bahadur
Morphological Image Processing Approach of Vehicle Detection for Real-Time Traffic Analysis Prutha Y M *1, Department Of Computer Science and Engineering Affiliated to VTU Belgaum, Karnataka Rao Bahadur
Dynamic Zonal Broadcasting for Effective Data Dissemination in VANET
 Dynamic Zonal Broadcasting for Effective Data Dissemination in VANET Masters Project Final Report Author: Madhukesh Wali Email: mwali@cs.odu.edu Project Advisor: Dr. Michele Weigle Email: mweigle@cs.odu.edu
Dynamic Zonal Broadcasting for Effective Data Dissemination in VANET Masters Project Final Report Author: Madhukesh Wali Email: mwali@cs.odu.edu Project Advisor: Dr. Michele Weigle Email: mweigle@cs.odu.edu
Figures. Tables. Comparison of Interchange Control Methods...25
 Signal Timing Contents Signal Timing Introduction... 1 Controller Types... 1 Pretimed Signal Control... 2 Traffic Actuated Signal Control... 2 Controller Unit Elements... 3 Cycle Length... 3 Vehicle Green
Signal Timing Contents Signal Timing Introduction... 1 Controller Types... 1 Pretimed Signal Control... 2 Traffic Actuated Signal Control... 2 Controller Unit Elements... 3 Cycle Length... 3 Vehicle Green
Contents. Basic Concepts. Histogram of CPU-burst Times. Diagram of Process State CHAPTER 5 CPU SCHEDULING. Alternating Sequence of CPU And I/O Bursts
 Contents CHAPTER 5 CPU SCHEDULING Basic Concepts Scheduling Criteria Scheduling Algorithms Multiple-Processor Scheduling Real-Time Scheduling Basic Concepts Maximum CPU utilization obtained with multiprogramming
Contents CHAPTER 5 CPU SCHEDULING Basic Concepts Scheduling Criteria Scheduling Algorithms Multiple-Processor Scheduling Real-Time Scheduling Basic Concepts Maximum CPU utilization obtained with multiprogramming
Exit 61 I-90 Interchange Modification Justification Study
 Exit 61 I-90 Interchange Modification Justification Study Introduction Exit 61 is a diamond interchange providing the connection between Elk Vale Road and I-90. Figure 1 shows the location of Exit 61.
Exit 61 I-90 Interchange Modification Justification Study Introduction Exit 61 is a diamond interchange providing the connection between Elk Vale Road and I-90. Figure 1 shows the location of Exit 61.
Texas Transportation Institute The Texas A&M University System College Station, Texas
 1. Report No. FHWA/TX-06/0-4729-2 2. Government Accession No. 3. Recipient's Catalog No. 4. Title and Subtitle DISTRIBUTED ARCHITECTURE AND ALGORITHM FOR ROBUST REAL-TIME PROGRESSION EVALUATION AND IMPROVEMENT
1. Report No. FHWA/TX-06/0-4729-2 2. Government Accession No. 3. Recipient's Catalog No. 4. Title and Subtitle DISTRIBUTED ARCHITECTURE AND ALGORITHM FOR ROBUST REAL-TIME PROGRESSION EVALUATION AND IMPROVEMENT
Texas Transportation Institute The Texas A&M University System College Station, Texas
 1. Report No. FHWA/TX-05/0-4422-2 4. Title and Subtitle DEVELOPMENT OF A TRAFFIC SIGNAL PERFORMANCE MEASUREMENT SYSTEM (TSPMS) 2. Government Accession No. 3. Recipient's Catalog No. Technical Report Documentation
1. Report No. FHWA/TX-05/0-4422-2 4. Title and Subtitle DEVELOPMENT OF A TRAFFIC SIGNAL PERFORMANCE MEASUREMENT SYSTEM (TSPMS) 2. Government Accession No. 3. Recipient's Catalog No. Technical Report Documentation
Traffic Controller Timing Processes
 4 Actuated Traffic Controller Timing Processes In Chapter 4, you will learn about the timing processes that run an actuated traffic controller. Many transportation engineers begin their study of signalized
4 Actuated Traffic Controller Timing Processes In Chapter 4, you will learn about the timing processes that run an actuated traffic controller. Many transportation engineers begin their study of signalized
International Journal of Scientific & Engineering Research, Volume 4, Issue 7, July ISSN
 International Journal of Scientific & Engineering Research, Volume 4, Issue 7, July-2013 377 Self-Healing Framework for Distribution Systems Fazil Haneef, S.Angalaeswari Abstract - The self healing framework
International Journal of Scientific & Engineering Research, Volume 4, Issue 7, July-2013 377 Self-Healing Framework for Distribution Systems Fazil Haneef, S.Angalaeswari Abstract - The self healing framework
Design of Traffic Flow Simulation System to Minimize Intersection Waiting Time
 Design of Traffic Flow Simulation System to Minimize Intersection Waiting Time Jang, Seung-Ju Department of Computer Engineering, Dongeui University Abstract This paper designs a traffic simulation system
Design of Traffic Flow Simulation System to Minimize Intersection Waiting Time Jang, Seung-Ju Department of Computer Engineering, Dongeui University Abstract This paper designs a traffic simulation system
Recent research on actuated signal timing and performance evaluation and its application in SIDRA 5
 Akcelik & Associates Pty Ltd REPRINT with MINOR REVISIONS Recent research on actuated signal timing and performance evaluation and its application in SIDRA 5 Reference: AKÇELIK, R., CHUNG, E. and BESLEY
Akcelik & Associates Pty Ltd REPRINT with MINOR REVISIONS Recent research on actuated signal timing and performance evaluation and its application in SIDRA 5 Reference: AKÇELIK, R., CHUNG, E. and BESLEY