On-demand high-capacity ride-sharing via dynamic trip-vehicle assignment - Supplemental Material -
|
|
|
- Lindsay Williamson
- 5 years ago
- Views:
Transcription
1 On-demand high-capacity ride-sharing via dynamic trip-vehicle assignment - Supplemental Material - Javier Alonso-Mora, Samitha Samaranayake, Alex Wallar, Emilio Frazzoli and Daniela Rus Abstract Ride sharing services are transforming urban mobility by providing timely and convenient transportation to anybody, anywhere, anytime. These services present enormous potential for positive societal impacts with respect to pollution, energy consumption, congestion, etc. Current mathematical models, however, do not fully address the potential of ride sharing. Recently, a large-scale study highlighted some of the benefits of car pooling, but was limited to static routes with two riders per vehicle (optimally) or three (with heuristics). We present a more general mathematical model for real-time high-capacity ride sharing that (1) scales to large numbers of passengers and trips, and (2) dynamically generates optimal routes with respect to online demand and vehicle locations. The algorithm starts from a greedy assignment and improves it via a constrained optimization, quickly returning solutions of good quality and converging to the optimal assignment over time. For the first time, we quantify experimentally the trade-off between fleet size, capacity, waiting time, travel delay, and operational costs for low to medium capacity vehicles, such as taxis and van shuttles. The algorithm is validated with approximately 3 million rides extracted from the New York City taxicab public dataset. Our experimental study considers ride sharing with rider capacity of up to ten simultaneous passengers per vehicle. The algorithm applies to fleets of autonomous vehicles and also incorporates rebalancing of idling vehicles to areas of high demand. This framework is general and can be used for many real-time multi-vehicle, multi-task assignment problems.
2 A. Definitions I. PROBLEM STATEMENT Consider two positions in space, q 1 and q 2, which can be encoded by their latitude and longitude coordinates. A function τ(q 1, q 2 ) to compute the travel time from q 1 to q 2 is required. When a network representation of the map is available, standard techniques for efficiently computing shortest paths can be used [1]. The best methods can compute shortest paths on networks with 70 million edges in less than a millisecond. A request r is defined by a tuple {o r, d r, t r r, t pl r, t p r, t d r, t r}, indicating its origin o r, its destination d r, the time of the request t r r, the latest acceptable pick-up time t pl r (initially given by t pl r = t r r + Ω with Ω the maximum waiting time), the pick-up time t p r, the expected drop off time t d r, and the earliest possible time at which the destination could be reached t r = t r r + τ(o r, d r ). The current state of a vehicle v is given by a tuple {q v, t v, P v }, indicating its current position q v, the current time t v and its passengers P v = {p 1,..., p n pass}. A passenger p is a request that has been v picked-up by a vehicle. A trip T = {r 1,..., r nt } is a set of requests that can be combined and served by a single vehicle. A trip may have one or more candidate vehicles for execution. Consider a fixed size m of the vehicle fleet, a fixed vehicle capacity ν (maximum number of passengers in a vehicle), and a maximum delay tolerated by a request r. The delay is given by the difference between the drop-off time and the minimal time to reach the destination, t d r t r. B. Problem statement In this work we propose a general framework for the multi-vehicle multi-request routing capable of addressing three main problems of ride-sharing or car-pooling. Compute, incrementally, an optimal assignment of a set of requests to a set of vehicles of given capacity. Allow for continuous operation and assignment of incoming requests to a fleet of vehicles. Enable rebalancing of the fleet of vehicles. Problem 1 (Batch assignment). Consider a set of requests R = {r 1,..., r n }, a set of vehicles V = {v 1,..., v m } at their current state including passengers, and a function to compute travel times on the road network. Compute the optimal assignment Σ of requests to vehicles that minimizes a cost function C and that satisfies a set of constraints Z, including a maximum capacity ν of passengers per vehicle. In particular, and not limited to, we will consider the following set of constraints Z: For each request r, its maximum waiting time t p r t pl r t r r + Ω. For each request or passenger r, its maximum travel delay t d r t r +. For each vehicle, the maximum number of passengers n pass v ν at any given time. Ideally all the requests shall be assigned to a vehicle, but given the constraints, this might not always be the case. Denote by R ok the set of requests assigned to a vehicle and R ko the set of requests that are not served by any vehicle. We define the cost C of an assignment Σ as the sum of travel delay over all passengers and assigned requests plus a large enough cost c ko for each non-assigned request. Formally, C(Σ) = δ p + δ r + c ko. (1) v V p P v r R ok r R ko The method here presented is general and admits alternative constraints and cost function. Given that the problem at hand is NP hard, obtaining an optimal assignment can be computationally expensive. For practical applications it is required that a sub-optimal solution is returned within an allocated
3 runtime budget, which might be improved incrementally up to optimality. We refer to this as an anytime algorithm. Problem 2 (Anytime property). Devise a method to solve Problem 1, this is to obtain the optimal assignment, which incrementally improves the quality of the solution. Given a limited computational budget, a sub-optimal assignment Σ of requests to vehicles, is returned. The proposed method of Section II addresses this two problems. Additionally, for real-time fleet management, the method shall apply to continuous discovery and assignment of incoming requests. Problem 3 (Continuous assignment). Consider a fixed number of vehicles m and incoming requests r(t) with request time t r = t. Assign requests to a vehicles while respecting the constraints Z and minimizing the cost C. The proposed approach, described in Section IV is to perform batch assignment of the requests within a short time span, for example every 30 seconds, to the fleet of vehicles. Problem 2 is invoked with the predicted state of the fleet at the assignment time and the cumulated requests. Requests that have not been picked-up by a vehicle within the previous assignment round are kept in the pool for assignment. After the assignment, due to fleet imbalances, the set R ko of unassigned requests may not be empty, and some empty vehicles V idle may still by unassigned to any request. This may occur when the idle vehicles are in areas far away from the area of current request, and due to the maximum waiting time and delay constraints and vehicle capacity. Under the assumptions that, (a) ignored requests may wait longer and request again, (b) it is likely that more requests occur in the same area where all requests can not be satisfied and (c) there are not enough requests in the neighborhood of the idle cars, we propose the following approach to rebalance the fleet by moving only the idle vehicles. Problem 4 (Rebalancing). Consider Problem 3. Consider Problem 1 as a batch assignment to solve Problem 3. Compute an assignment of the idle vehicles V idle to the ignored requests in R ko to minimize the sum of waiting times, with the constraint that either all requests or all the vehicles are assigned..
4 II. METHOD In this section we describe a solution to Problem 1 and Problem 2. A. Overview Given a set of requests R = {r 1,..., r n } and a set of vehicles V = {v 1,..., v m } at their current state including passengers, the algorithm computes an incrementally optimal solution and consists of the following three steps, shown in the high-level overview of Figure 1: 1) Pairwise request-vehicle RV graph: The first step is to compute (a) which requests can be pairwise combined, taking into account both their origin and destination, and (b) which vehicles can serve which requests individually, given their current passengers. 2) Request-trip-vehicle RTV graph: The second step is to explore the regions of the graph for which its induced subgraph is complete, or cliques, to find trips (groups of requests) that can be combined and picked-up by a vehicle, while satisfying all the constraints. A request may form part of several potential trips, and a trip might have several candidate vehicles for execution. 3) Optimal assignment: The last step is to, given the RTV graph of potential trips and pick-up vehicles, compute the optimal assignment of one trip per vehicle at most. This is converted into an Integer Linear Program ILP, which is solved incrementally. B. Optimal route for fixed vehicle and passengers Consider a vehicle v, with a set of passengers P v and a small set of assigned requests R v, which may have different request times. The optimal travel path σ v for the vehicle that minimizes the sum of delays r P v R v (t d r t r) subject to the constraints Z (waiting time, delay and capacity) is given by a function travel(v, R v ), (2) which returns invalid if no path exists. This vehicle routing problem is a computationally hard problem. For vehicles with low capacity and fixed requests, such as taxis, the optimal path can be computed via an exhaustive search. For vehicles with larger capacity, heuristic methods such as Lin-Kernighan [3], Tabu search [2] or Simulated Annealing [5] may be used. In Figure 2 a representative vehicle with two passengers is shown, with its past path and its optimal path for picking up three additional requests and dropping off all passengers and requests. The vehicle has capacity four and it will drop-off one of the passengers before picking up the last one.
")



 Example of a street network with four requests (orange")






5 Travel requests Vehicle status Pairwise RV- graph RTV- graph Assignment problem ILP KO OK Rebalancing LP Assignment Σ (a) (b) (c) (d) (e) Fig. 1. Schematic overview of the proposed method for batch assignment of multiple requests to multiple vehicles of capacity ν. The method consists of several steps leading to an integer linear optimization which provides an anytime optimal assignment. (a) Example of a street network with four requests (orange human = origin, red triangle = destination) and two vehicles (yellow car = origin, red triangle = destination of passenger). Vehicle 1 has one passenger and vehicle 2 is empty. (b) Pairwise shareability RV-graph of requests and vehicles. Cliques of this graph are potential trips. (c) RTV-graph of candidate trips and vehicles which can execute them. A node (yellow triangle) is added for requests that can not be satisfied. (d) Optimal assignment given by the solution of the ILP, where vehicle 1 serves requests 2 and 3 and vehicle 2 serves requests 1 and 4. (e) Planned route for the two vehicles and their assigned requests. In this case no rebalancing step is required since all requests and vehicles are assigned. Fig. 2. Past path (yellow) and optimal path (brown) for a vehicle (yellow dot) with two passengers and scheduled pick up of three requests (star) and drop-offs (triangle).

6 C. Pairwise graph of vehicles and requests (RV-graph) The first step of the method is to compute (a) which requests can be pairwise combined, and (b) which vehicles can serve which requests individually, given their current passengers. This step builds on the idea of share-ability graphs proposed by [6], but it is not limited to the requests and includes the vehicles at their current state as well. Two requests r 1 and r 2 are connected in the graph if they can potentially be combined. This is, if a virtual vehicle starting at the origin of one of them could pick-up and drop-off both requests while satisfying the constraints Z of maximum waiting time and delay. A cost (t d r t r) can be associated r={1,2} to each edge e(r 1, r 2 ). Likewise, a request r and a vehicle v are connected if the request can be served by the vehicle while satisfying the constraints Z. This is, if travel(v, r) returns a valid trip that drops the current passengers of the vehicle and the picked request r within the specified maximum waiting and delay times. The edge is denoted by e(r, v). Limits on the maximum number of edges per node can be imposed, trading-off optimality at the later stages. Speed-ups such as the ones proposed in T-share [4] could be employed in this stage to prune the most likely vehicles to pick up a request. This graph, denoted RV-graph, gives an overview of which requests and vehicles might be shared. In Figure 3 an example of the RV-graph is shown with 90 requests and 30 vehicles. Fig. 3. Example of a pairwise RV-graph for 90 requests (star) and 30 vehicles (circle) with edges between two requests in dotted red and between a request and a vehicle in solid green. The maximum waiting time and delay are three and six minutes in this example.
7 D. Graph of candidate trips and pick-ups (RTV-graph) The second step of the method is to explore the regions of the RV-graph for which its induced subgraph is complete, or cliques, to find feasible trips. Recall that a trip T is defined by a set of requests T = {r 1,..., r nt }. A trip is feasible if the requests can be combined, picked-up and dropped-off by some vehicle, while satisfying the constraints Z. A request may form part of several feasible trips of varying size, and a trip might admit several different vehicles for execution. The request-trip-vehicle RTV-graph contains edges e(r, T ), between a request r and a trip T and feasible edges e(t, v), between a trip T and a vehicle v. Namely, e(r, T ) r T (3) e(t, v) travel(v, T ) = valid (4) The following observations are made to efficiently compute feasible trips. Lemma 1 (Cliques). A trip T can be feasible only if a clique in the RV-graph exists for all requests in T and some vehicle v. Namely, if T is valid, then, v V such that r 1, r 2 T, e(r 1, r 2 ) and e(r 1, v) exist A stronger requirement for existence is the following, which leads to the idea of incrementally computing trips of larger size. Lemma 2 (Sub-feasibility). A trip T can be feasible only if there exists a vehicle v for which, for all r T, the sub-trips T = T \r are feasible (a sub-trip T contains all the requests of T but one). Namely, T feasible v V such that r T, e(t \ r, v) exists. Therefore, a trip T only needs to by checked for existence if there exists a vehicle v for which all of its sub-trips T present an edge e(t, v) in the RTV-graph. The algorithm to compute the feasible trips and edges proceeds incrementally in trip size for each vehicle, as shown in Algorithm 1, where T is the list of feasible trips. With each node e(t, v), the cost C of the trip and pick-up is stored. For each vehicle, a timeout can be set after which no more trips are explored. This leads to suboptimality of the solution, but faster computation, removing longer trips. Note that steps 7 and 12 of the Algorithm can be efficiently implemented by employing ordered lists with respect to the request ids. This step can be parallelized among the vehicles.
8 Algorithm 1 Generation of RTV-graph 1: T = 2: for each vehicle v V do 3: T k = k {1,..., ν} 4: [Add trips of size one] 5: for e(r, v) edge of RV-graph do 6: T 1 T = {r}; Add e(r, T ) and e(t, v) 7: [Add trips of size two] 8: for all {r 1 }, {r 2 } T 1 and e(r 1, r 2 ) RV-graph do 9: if travel(v, {r 1, r 2 }) = valid then 10: T 2 T = {r 1, r 2 }; Add e(r i, T ) and e(t, v) 11: [Add trips of size k] 12: for k {3,..., ν} do 13: for all T 1, T 2 T k 1 with T 1 T 2 = k do 14: Denote T 1 T 2 = {r 1,..., r k } 15: if i {1,..., k}, {r 1,..., r k } \ r i T k 1 then 16: if travel(v, T 1 T 2 ) = valid then 17: T k T = T 1 T 2 18: Add e(r i, T ), r i T, and e(t, v) 19: T i {1,...,ν} T i
9 E. Optimal assignment of trips to vehicles The last step of the method is to, given the RTV-graph of potential trips and pick-up vehicles, compute the optimal assignment of vehicles to trips. This is formalized as an Integer Linear Program (ILP). First, a greedy solution is computed, which serves as initial point for the ILP optimization. 1) Greedy assignment: Trips are assigned to vehicles iteratively in decreasing size of the trip and increasing cost. The idea is the maximize the amount of requests served while minimizing cost. The method to greedily maximize the cost function C of Equation 1 is described in Algorithm 2. Algorithm 2 Greedy assignment 1: R ok = ; V ok = 2: for k = ν; k > 0; k do 3: S k := sort e(t, v) in increasing cost, T T k, v V 4: while S k do 5: pop e(t, v) S k 6: if r T, r / R ok and v / V ok then 7: R ok { r T }; V ok v 8: Σ greedy e(t, v) In the following, the optimization method to optimally assign trips to vehicles is described. 2) Variables: A binary variable ɛ i,j {0, 1} is introduced for each edge e(t i, v j ) between a trip T i T and a vehicle v j V in the RTV-graph. If ɛ i,j = 1 then vehicle v j is assigned to trip T i. Denote by E T V the set of {i, j} indexes for which an edge e(t i, v j ) exists in the RTV-graph. An additional binary variable χ k {0, 1} is introduced for each request r k R. These variables are active, χ k = 1, if the associated request r k can not be served by any vehicle and is ignored. Denote the set of variables X = {ɛ i,j, χ k ; e(t i, v j ) node in RTV-graph r k R}. (5) 3) Cost: The cost function, equivalent to C(Σ) in Equation 1, is given by C(X ) := c i,j ɛ i,j + c ko χ k, (6) i,j E T V where the individual costs are given by the sum of delays, k {0,...,n} c i,j = r T i (t d r t r), as returned by travel(v j, T i ), (7) and c ko is a large enough constant to penalize ignored requests. 4) Constraints: Two types of constraints are included, as follows. Each vehicle is assigned to a singe trip at most, ɛ i,j 1 v j V, (8) i I V j where Ij V denotes the indexes i for which an edge e(t i, v j ) exists in the RTV-graph. Each request is assigned to a vehicle or ignored, ɛ i,j + χ k = 1 r k R, (9) i Ik R j Ii T where I R k denotes the indexes i for which an edge e(r k, T i ) exists in the RTV-graph and I T i denotes the indexes j for which an edge e(t i, v j ) exists in the RTV-graph. This is, the trips of which the request forms part and the vehicles that can service each of those trips.
10 5) Assignment: The optimal assignment is found by solving an ILP optimization defined by the aforementioned variables, cost and constraints, as shown in Algorithm 3. Starting from the greedy assignment, the ILP can be solved with state of the art solvers via branch and bound with heuristics and duality gap checking. These algorithms can be parallelized and return a suboptimal solution if stopped before convergence. Algorithm 3 Optimal assignment 1: Initial guess: Σ greedy 2: Σ optim := arg min C(X ) (Eq. 6) X 3: s.t. ɛ i,j 1 i I j V 4: ɛ i,j + χ k = 1 i Ik R j Ii T v j V r k R
11 A. Complexity III. THEORETICAL GUARANTEES The number of binary variables in the ILP is equal to the number of edges e(t, v) in the RTV graph plus the number of requests. In the worst case, where all possible trip combinations are explored and feasible, it is n! m ν!(n ν)! O(m nν ), (10) where m is the number of vehicles, n the number of requests and ν the maximum capacity of the vehicles. Nonetheless, this value would only be reached in a complete RV-graph where all vehicles can serve all requests and all requests can be combined with each other. This is, where all possible trip combinations up to capacity ν are feasible. In practice, the number of variables is orders of magnitude lower and at most the number of cliques in the RV-graph. The number of constraints is n + m, the number of requests plus the number of vehicles. B. Anytime optimality and correctness Theorem 1 (Optimality). The method is optimal, given enough computational time. If all the steps of the method are executed until all possible trips and assignments are explored, the ride-vehicle assignment method guarantees optimality of the assignment and routes, given the constraints Z. Proof: For any particular assignment between a trip T (set of requests) and a vehicle v, the function travel(t, v) returns the optimal route, which can be computed exhaustively. Consider the case where algorithms to compute the RV-graph and the RTV-graph are executed up to completion, this is, until all possible trips of size lower or equal than the vehicle capacity are explored. At that point, all combinations of riders and vehicles which satisfy the constraints have been explored exhaustively and have been added in the RTV-graph. At this stage, all valid trip combinations are included in the RTV-graph. Next, the ILP assignment contains binary variables for all possible trip-vehicle assignments. This problem is solved via branch and bound, which, given enough time, is guaranteed to return the optimal assignment, although it may have to explore all possible assignments. In the worst case, the algorithm can be seen as an exhaustive search which returns the optimal assignment and routes. The advantage of the method is that, by decoupling the computation of valid routes and trips from the assignment, good solutions can be found efficiently. Theorem 2 (Correctness). The returned assignment and vehicle routes respect the constraints. Proof: By construction, the function travel(t, v) returns a valid route (if one exists) that satisfies the set of constraints. In our case, this is, the vehicle capacity, maximum waiting time and maximum delay are respected. Therefore, in the RTV-graph, all included edges e(t, v) verify that a valid route exists, as returned by travel(t, v). The greedy assignment provides a feasible assignment of trips to vehicles from the RTV-graph by construction. This is, each request is assigned at most to one vehicle. And the ILP optimization refines this solution, while respecting the constraints. In the worst case, the ILP returns the greedy assignment. These steps guarantee that the assignment and routes are valid. Theorem 3 (Anytime optimality). The method is anytime optimal. The method is able to return a correct solution quickly. Given additional computational resources, the solution is refined and the method returns the best solution found up to that time.
12 Proof: The RTV-graph can be initialized with all valid trips with a single request per vehicle. If additional computational resources are available, additional trips (of increasing number of requests) can be explored and added to the RTV-graph. A greedy assignment of trips to vehicles is computed quickly. The ILP, which returns an optimized assignment, is then initialized from this greedy assignment and as time progresses explores additional branches. If quitted at any time, it returns the best solution found up to that time. If run to completion, it returns the optimal assignment, for the edges of the RTV-graph. C. Heuristics for real-time execution In practice, a time-out can be set both for the amount of time spent generating candidate trips for each vehicle, and for the amount of time spent exploring the branches of the ILP. Alternatively, one may set a limit on the number of vehicles considered per request, the number of candidate trips per vehicle or the optimality gap of the ILP. These trade-off optimality for tractability and depend on the available resources. To achieve real-time performance we employ a set of timeouts. If allowed to progress further, the method would eventually find the optimal assignment. We implemented the function travel(t, v), which computes the optimal route for given trip T and vehicle v, as follows. If the number of passengers and requests is less or equal than four, we perform an exhaustive search to compute the optimal route which satisfies the constraints. If the number of passengers is greater than four, for each additional request we only check the routes that maintain the order of the current passengers in the vehicle. In the computation of the RV-graph one may set limits on the number of edges. In particular, we compute the complete graph and, for each request, we keep a maximum of 30 links with candidate vehicles, in particular those of lowest trip cost. Speed-ups such as the ones proposed in T-share [4] could be employed in this stage to prune the most likely vehicles to pick up a request. In the computation of the RTV-graph we specify a maximum amount of time, per vehicle, to explore potential trips and add edges to the graph. In particular, we used a timeout of 0.2 seconds per vehicle. This leads to sub-optimality of the solution, but faster computation, removing longer trips. The ILP can be solved with state of the art solvers. In particular, we employed Mosek and set both an optimality gap of 0.1% and a maximum run time of 15 seconds. This solvers employ heuristics in the exploration of the branches of the problem. D. Parallelization All steps of the proposed method can be parallelized. We parallelized the computation of the RV-graph among the requests. The computation of the RTV-graph can be performed in parallel as well, distributing he computation among the vehicles. Finally, the ILP optimization is parallelized in most state of the art solvers.
13 IV. CONTINUOUS APPLICATION WITH INCOMING REQUESTS Here we describe a solution for Problem 3. Consider a fixed vehicle fleet of size m and incoming requests r(t) with request time t r = t. A pool of requests R is maintained where: new requests are added as they are received requests are removed when they are (a) picked up by a vehicle (they became passengers) or (b) they could not be successfully matched and picked-up by any vehicle within the maximum waiting time (they are ignored). At a certain framerate (in our experiments we used 30s) a batch assignment of the requests to the fleet of vehicles is computed by resolving Problem 2 with the predicted state of the fleet at the assignment time (including passengers). If a request is matched to a vehicle at any given iteration, its latest pick-up time is reduced to the expected pick-up time by that vehicle and the cost χ k of ignoring it is increased for subsequent iterations. A request might be rematched to a different vehicle in subsequent iterations as long as its waiting time decreases and until it is picked up. Once a request is picked-up it remains in that vehicle and can not be rematched - the vehicle may still pick additional passengers. In each iteration, the new assignment of requests to vehicles guarantees that the current passengers are dropped-off within the maximum delay constraint, included in Z in Section II-B.
14 V. REBALANCING Here we describe a solution for Problem 4. After the assignment, due to fleet imbalances, the set R ko of unassigned requests may not be empty, and some empty vehicles V idle may still by unassigned to any request. This may occur when the idle vehicles are in areas far away from the area of current request, and due to the maximum waiting time and delay constraints and vehicle capacity. Under the assumptions that, (a) ignored requests may wait longer and request again, (b) it is likely that more requests occur in the same area where all requests can not be satisfied and (c) there are not enough requests in the neighborhood of the idle cars, we propose the following approach to rebalance the fleet by moving only the idle vehicles. To rebalance the vehicle fleet, after each batch assignment, the vehicles in V idle are assigned to requests in R ko to minimize the sum of travel times, with the constraint that either all requests or all the vehicles are assigned. For this, we first compute the travel time τ v,r of each individual request r - vehicle v pickup and then obtain the optimum of the assignment via a fast Linear Program described in Algorithm 4. In this approach, if all requests can be satisfied some vehicles may remain idle, saving fuel and distance travelled, which is the case at night time. Algorithm 4 Rebalancing 1: Given: the idle (empty, stopped and unassigned) vehicles V idle, and the unassigned requests R ko. 2: Given: the shortest travel time τ v,r for vehicle v V idle to pick request r R ko. 3: Variables: Y = v Vidle,r R ko y v,r. Where y v,r R indicates individual assignments. 4: 5: Σ rebalance := arg min Y v V idle r R ko τ v,r y v,r 6: s.t. v V idle R ko y v,r = min( V idle, R ko ) 7: 0 y v,r 1 y v,r Y. 8: 9: Where. denotes the number of elements of a set. 10: The solution of this Linear Program is also a solution of the Integer Linear Program with y v,r {0, 1}.
15 VI. ROBUSTNESS ANALYSIS In this section we present results to confirm the robustness of the proposed method with respect to the length of the time window and the number - or density - of requests. We also present results highlighting the influence of travel time and congestion. In each figure we analyze (a) service rate (percentage of requests serviced), (b) average in car delay δ ω, (c) average waiting time ω, (d) average distance traveled by each vehicle during a single day, (e) percentage of shared rides (number of passengers who shared a ride, divided by the total number of picked-up passengers) and (f) average computational time for a 30 seconds iteration of the method, in a 24 core 2.5GHz machine, including computation of the RV-graph, computation of the RTV-graph, ILP assignment, rebalancing and data writing (higher levels of parallelization would drastically reduce this computational time). The parameters employed in the simulation are specified in (SI Appendix, Sec. III.C). A. Interval length In Figure 4 we show robustness results with respect to the interval length, this is, the period of time for which requests are aggregated before a new assignment to the fleet of vehicles. We compare different interval sizes of 10 s, 20 s, 30 s, 40 s and 50 seconds. Results are shown for a nominal case where we employ a fleet of 2000 vehicles of capacity 4 and a maximum waiting time of 5 minutes. The points shown represent the average over a week of data in Manhattan with about 3 million requests. In the experimental analysis of the effects of ride sharing, shown in the results section of the main paper, we employed a time window of 30 seconds, which we considered reasonable when taking into account the computation cost of the approach and the time a person would be willing to wait for receiving an assignment. In Figure 4 we observe that the method is robust with respect to the time interval: the service rate and percentage of shared rides is mostly unchanged, the mean in-car travel delay slightly decreases with larger time intervals (better assignments are achieved), while both the mean waiting time and mean traveled distance by each vehicle do increase slightly with larger time intervals (the user have to wait longer to receive an assignment). The computational time of the method does increase with the size of the interval, since more requests are jointly assigned. B. Density of demand In Figure 5 we show robustness results with respect to the density of demand, this is, the number of travel requests. We compare three different densities, the nominal one of Manhattan with about 3 million requests per week, half of the demand (x0.5) and double the demand (x2). To obtain half of the requests (x0.5) we sorted all the requests of each day by time and removed every odd line, this leads to about 1.5 million requests per week, or 200,000 per day. To obtain double the requests (x2), we cumulated the requests of the same day (e.g. Monday) for two consecutive weeks, this leads to about 6 million requests per week, or 850,000 per day. Results are shown for two nominal cases where we employ (i) a fleet of 2000 vehicles of capacity 4 and a maximum waiting time of 5 minutes, and (ii) the same fleet but of capacity 1 (standard taxis). The points shown represent the average over a week of data in Manhattan. We observe that the approach is robust with the decrease and increase in the number of requests, and that, as expected that performance metrics improve with a decrease in the number of requests.
 Mean distance travelled (e) Percentage of shared rides (f) Mean")




![The nominal case [x1] is for a simulation with the real requests in](/docs-images/85/92779016/images/16-5.jpg "Manhattan, of about 3 million per week. The case [x0.")
![5] contains only half of the requests, about 1.5 million per week.](/docs-images/85/92779016/images/16-6.jpg "And the case [x2] contains double the number of requests, about 6 million")
 a fleet of")
 the same fleet but of capacity 1 (standard taxis). .")
16 (a) Mean service rate (b) Mean in-car travel delay δ ω (c) Mean waiting time ω (d) Mean distance travelled (e) Percentage of shared rides (f) Mean computational time Fig. 4. Comparison of several performance metrics for varying interval size for the method, 10, 20, 30, 40 and 50 seconds. Results are shown for a nominal case where we employ a fleet of 2000 vehicles of capacity 4 and a maximum waiting time of 5 minutes. The points shown represent the average over a week of data in Manhattan with about 3 million requests. (a) Mean service rate (b) Mean in-car travel delay δ ω (c) Mean waiting time ω (d) Mean distance travelled (e) Percentage of shared rides (f) Mean computational time Fig. 5. Comparison of several performance metrics for varying density of requests. The nominal case [x1] is for a simulation with the real requests in Manhattan, of about 3 million per week. The case [x0.5] contains only half of the requests, about 1.5 million per week. And the case [x2] contains double the number of requests, about 6 million per week, or about 800,000 per day. Results are shown for two nominal cases where we employ (i) a fleet of 2000 vehicles of capacity 4 and a maximum waiting time of 5 minutes, and (ii) the same fleet but of capacity 1 (standard taxis). The points shown represent the average over a week of data in Manhattan.
 the mean daily travel time, (ii) the estimated travel times for 12:00, and (iii) the estimated travel times for 19:00.")
![Estimated travel times for each edge in the road network of Manhattan where obtained from [6].](/docs-images/85/92779016/images/17-2.jpg "Results are shown for a nominal case where we employ a fleet of 2000 vehicles of capacity 4 and a maximum waiting time of 5 minutes.")
 the service rate is reduced by about 5% and the mean waiting time and travel delay slightly increase.")
 the service rate is increased by about 5% and the mean waiting time and travel delay decrease considerably (20 and 10")
17 C. Influence of congestion In Figure 6 we show results highlighting the influence of travel time and congestion. In this experiments we compare three different travel time estimates: (i) the mean daily travel time, (ii) the estimated travel times for 12:00, and (iii) the estimated travel times for 19:00. Estimated travel times for each edge in the road network of Manhattan where obtained from [6]. Results are shown for a nominal case where we employ a fleet of 2000 vehicles of capacity 4 and a maximum waiting time of 5 minutes. The points shown represent the average over a week of data in Manhattan with about 3 million requests. We highlight two observations. First, when using the travel times for 12:00 (lower estimated travel speed) the service rate is reduced by about 5% and the mean waiting time and travel delay slightly increase. This is expected due to the lower travel speed during congested hours. Second, when using the travel times for 19:00 (higher estimated travel speed) the service rate is increased by about 5% and the mean waiting time and travel delay decrease considerably (20 and 10 seconds respectively). This is also expected due to the higher travel speed and correlates with the longer distance traveled by the vehicles. We observe that the mean travel time estimate provides a good estimate of the performance metrics, closer to the ones from the rush hour time than to those from low hour time. This is in line with the observation that travel speed in Manhattan remains pretty constant through-out the daytime. Furthermore, by using the mean daily time estimate, we smoothen possible inaccuracies in the travel time estimates. (a) Mean service rate (b) Mean in-car travel delay δ ω (c) Mean waiting time ω (d) Mean distance travelled (e) Percentage of shared rides (f) Mean computational time Fig. 6. Comparison of several performance metrics when using three different travel time estimates: mean daily travel time, travel time at 12:00 and travel time at 19:00. Results are shown for a nominal cases where we employ a fleet of 2000 vehicles of capacity 4 and a maximum waiting time of 5 minutes. The points shown represent the average over a week of data in Manhattan.
18 VII. DATA TABLE I MEAN COMPUTATIONAL TIME FOR A 30 SECONDS BATCH ASSIGNMENT OF REQUESTS TO VEHICLES IN A 24 CORE 2.5GHZ PC. Vehicles Capacity Waiting Time Mean Computational Time [s]
19 TABLE II AVERAGE VALUES OF SEVERAL PERFORMANCE METRICS FOR RIDE SHARING OVER A WHOLE WEEK WITH OVER 3 MILLION REQUESTS. ALL EXPERIMENTS INCLUDE REBALANCING EXCEPT FOR THOSE INDICATED WITH (N.R.) NEXT TO THE VEHICLE CAPACITY. Ω IS THE MAXIMUM WAITING TIME AND THE MAXIM DELAY, INCLUDING BOTH IN-CAR DELAY AND WAITING TIME. SERVICE AND SHARED RATES ARE IN PER ONE. Vehicles Capacity Ω [s] [s] Service Rate Mean Waiting [s] Mean In-Car Delay [s] Mean Passengers Shared Rate Mean Travel [km] n.r n.r n.r

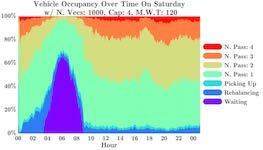
20 VIII. ADDITIONAL EXPERIMENTAL FIGURES Fig. 7. Occupancy rates, 1000 vehicles, capacity 1, = 120 s Fig. 8. Occupancy rates, 1000 vehicles, capacity 1, = 300 s Fig. 9. Occupancy rates, 1000 vehicles, capacity 1, = 420 s
21 Fig. 10. Occupancy rates, 1000 vehicles, capacity 2, = 120 s Fig. 11. Occupancy rates, 1000 vehicles, capacity 2, = 300 s Fig. 12. Occupancy rates, 1000 vehicles, capacity 2, = 420 s

22 Fig. 13. Occupancy rates, 1000 vehicles, capacity 4, = 120 s Fig. 14. Occupancy rates, 1000 vehicles, capacity 4, = 300 s Fig. 15. Occupancy rates, 1000 vehicles, capacity 4, = 420 s

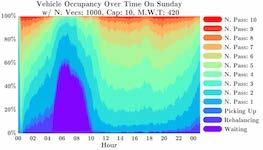
23 Fig. 16. Occupancy rates, 1000 vehicles, capacity 10, = 120 s Fig. 17. Occupancy rates, 1000 vehicles, capacity 10, = 300 s Fig. 18. Occupancy rates, 1000 vehicles, capacity 10, = 420 s
24 Fig. 19. Occupancy rates, 2000 vehicles, capacity 1, = 120 s Fig. 20. Occupancy rates, 2000 vehicles, capacity 1, = 300 s Fig. 21. Occupancy rates, 2000 vehicles, capacity 1, = 420 s
25 Fig. 22. Occupancy rates, 2000 vehicles, capacity 2, = 120 s Fig. 23. Occupancy rates, 2000 vehicles, capacity 2, = 300 s Fig. 24. Occupancy rates, 2000 vehicles, capacity 2, = 420 s

26 Fig. 25. Occupancy rates, 2000 vehicles, capacity 4, = 120 s Fig. 26. Occupancy rates, 2000 vehicles, capacity 4, = 300 s Fig. 27. Occupancy rates, 2000 vehicles, capacity 4, = 420 s

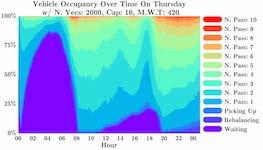
27 Fig. 28. Occupancy rates, 2000 vehicles, capacity 10, = 120 s Fig. 29. Occupancy rates, 2000 vehicles, capacity 10, = 300 s Fig. 30. Occupancy rates, 2000 vehicles, capacity 10, = 420 s
28 Fig. 31. Occupancy rates, 3000 vehicles, capacity 1, = 120 s Fig. 32. Occupancy rates, 3000 vehicles, capacity 1, = 300 s Fig. 33. Occupancy rates, 3000 vehicles, capacity 1, = 420 s

29 Fig. 34. Occupancy rates, 3000 vehicles, capacity 2, = 120 s Fig. 35. Occupancy rates, 3000 vehicles, capacity 2, = 300 s Fig. 36. Occupancy rates, 3000 vehicles, capacity 2, = 420 s

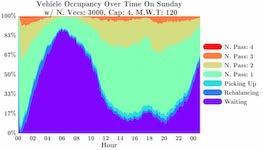
30 Fig. 37. Occupancy rates, 3000 vehicles, capacity 4, = 120 s Fig. 38. Occupancy rates, 3000 vehicles, capacity 4, = 300 s Fig. 39. Occupancy rates, 3000 vehicles, capacity 4, = 420 s
31 Fig. 40. Occupancy rates, 3000 vehicles, capacity 10, = 120 s Fig. 41. Occupancy rates, 3000 vehicles, capacity 10, = 300 s Fig. 42. Occupancy rates, 3000 vehicles, capacity 10, = 420 s
32 REFERENCES [1] D. Delling, P. Sanders, D. Schultes, and D. Wagner. Engineering Route Planning Algorithms. 2: , [2] F. Glover and M. Laguna. Tabu Search? Springer, [3] K. Helsgaun. An effective implementation of the lin kernighan traveling salesman heuristic. European Journal of Operational Research, 126(1): , [4] S. Ma, Y. Zheng, and O. Wolfson. T-share: A large scale dynamic taxi ridesharing service. Proceedings of IEEE ICDE, [5] D. Pham and D. Karaboga. Intelligent optimisation techniques: genetic algorithms, tabu search, simulated annealing and neural networks. Springer Science & Business Media, [6] P. Santi, G. Resta, M. Szell, S. Sobolvesky, S. Strogatz, and C. Ratti. Quantifying the benefits of vehicle pooling with shareability networks. PNAS, 2014.
Control of the Contract of a Public Transport Service
 Control of the Contract of a Public Transport Service Andrea Lodi, Enrico Malaguti, Nicolás E. Stier-Moses Tommaso Bonino DEIS, University of Bologna Graduate School of Business, Columbia University SRM
Control of the Contract of a Public Transport Service Andrea Lodi, Enrico Malaguti, Nicolás E. Stier-Moses Tommaso Bonino DEIS, University of Bologna Graduate School of Business, Columbia University SRM
Effective and Efficient: Large-scale Dynamic City Express
 Effective and Efficient: Large-scale Dynamic City Express Siyuan Zhang, Lu Qin, Yu Zheng, Senior Member, IEEE, and Hong Cheng Abstract Due to the large number of requirements for city express services
Effective and Efficient: Large-scale Dynamic City Express Siyuan Zhang, Lu Qin, Yu Zheng, Senior Member, IEEE, and Hong Cheng Abstract Due to the large number of requirements for city express services
Fast Detour Computation for Ride Sharing
 Fast Detour Computation for Ride Sharing Robert Geisberger, Dennis Luxen, Sabine Neubauer, Peter Sanders, Lars Volker Universität Karlsruhe (TH), 76128 Karlsruhe, Germany {geisberger,luxen,sanders}@ira.uka.de;
Fast Detour Computation for Ride Sharing Robert Geisberger, Dennis Luxen, Sabine Neubauer, Peter Sanders, Lars Volker Universität Karlsruhe (TH), 76128 Karlsruhe, Germany {geisberger,luxen,sanders}@ira.uka.de;
TIME- OPTIMAL CONVERGECAST IN SENSOR NETWORKS WITH MULTIPLE CHANNELS
 TIME- OPTIMAL CONVERGECAST IN SENSOR NETWORKS WITH MULTIPLE CHANNELS A Thesis by Masaaki Takahashi Bachelor of Science, Wichita State University, 28 Submitted to the Department of Electrical Engineering
TIME- OPTIMAL CONVERGECAST IN SENSOR NETWORKS WITH MULTIPLE CHANNELS A Thesis by Masaaki Takahashi Bachelor of Science, Wichita State University, 28 Submitted to the Department of Electrical Engineering
Vehicle routing problems with road-network information
 50 Dominique Feillet Mines Saint-Etienne and LIMOS, CMP Georges Charpak, F-13541 Gardanne, France Vehicle routing problems with road-network information ORBEL - Liège, February 1, 2018 Vehicle Routing
50 Dominique Feillet Mines Saint-Etienne and LIMOS, CMP Georges Charpak, F-13541 Gardanne, France Vehicle routing problems with road-network information ORBEL - Liège, February 1, 2018 Vehicle Routing
Coordinated Scheduling and Power Control in Cloud-Radio Access Networks
 Coordinated Scheduling and Power Control in Cloud-Radio Access Networks Item Type Article Authors Douik, Ahmed; Dahrouj, Hayssam; Al-Naffouri, Tareq Y.; Alouini, Mohamed-Slim Citation Coordinated Scheduling
Coordinated Scheduling and Power Control in Cloud-Radio Access Networks Item Type Article Authors Douik, Ahmed; Dahrouj, Hayssam; Al-Naffouri, Tareq Y.; Alouini, Mohamed-Slim Citation Coordinated Scheduling
Combinatorial Problems in Multi-Robot Battery Exchange Systems
 IEEE TRANSACTIONS ON AUTOMATION SCIENCE AND ENGINEERING, VOL. XX, NO. X, MONTH 2017 1 Combinatorial Problems in Multi-Robot Battery Exchange Systems Nitin Kamra, T. K. Satish Kumar, and Nora Ayanian, Member,
IEEE TRANSACTIONS ON AUTOMATION SCIENCE AND ENGINEERING, VOL. XX, NO. X, MONTH 2017 1 Combinatorial Problems in Multi-Robot Battery Exchange Systems Nitin Kamra, T. K. Satish Kumar, and Nora Ayanian, Member,
CS188 Spring 2014 Section 3: Games
 CS188 Spring 2014 Section 3: Games 1 Nearly Zero Sum Games The standard Minimax algorithm calculates worst-case values in a zero-sum two player game, i.e. a game in which for all terminal states s, the
CS188 Spring 2014 Section 3: Games 1 Nearly Zero Sum Games The standard Minimax algorithm calculates worst-case values in a zero-sum two player game, i.e. a game in which for all terminal states s, the
Scheduling. Radek Mařík. April 28, 2015 FEE CTU, K Radek Mařík Scheduling April 28, / 48
 Scheduling Radek Mařík FEE CTU, K13132 April 28, 2015 Radek Mařík (marikr@fel.cvut.cz) Scheduling April 28, 2015 1 / 48 Outline 1 Introduction to Scheduling Methodology Overview 2 Classification of Scheduling
Scheduling Radek Mařík FEE CTU, K13132 April 28, 2015 Radek Mařík (marikr@fel.cvut.cz) Scheduling April 28, 2015 1 / 48 Outline 1 Introduction to Scheduling Methodology Overview 2 Classification of Scheduling
Fast Placement Optimization of Power Supply Pads
 Fast Placement Optimization of Power Supply Pads Yu Zhong Martin D. F. Wong Dept. of Electrical and Computer Engineering Dept. of Electrical and Computer Engineering Univ. of Illinois at Urbana-Champaign
Fast Placement Optimization of Power Supply Pads Yu Zhong Martin D. F. Wong Dept. of Electrical and Computer Engineering Dept. of Electrical and Computer Engineering Univ. of Illinois at Urbana-Champaign
TRAFFIC SIGNAL CONTROL WITH ANT COLONY OPTIMIZATION. A Thesis presented to the Faculty of California Polytechnic State University, San Luis Obispo
 TRAFFIC SIGNAL CONTROL WITH ANT COLONY OPTIMIZATION A Thesis presented to the Faculty of California Polytechnic State University, San Luis Obispo In Partial Fulfillment of the Requirements for the Degree
TRAFFIC SIGNAL CONTROL WITH ANT COLONY OPTIMIZATION A Thesis presented to the Faculty of California Polytechnic State University, San Luis Obispo In Partial Fulfillment of the Requirements for the Degree
Graphs and Network Flows IE411. Lecture 14. Dr. Ted Ralphs
 Graphs and Network Flows IE411 Lecture 14 Dr. Ted Ralphs IE411 Lecture 14 1 Review: Labeling Algorithm Pros Guaranteed to solve any max flow problem with integral arc capacities Provides constructive tool
Graphs and Network Flows IE411 Lecture 14 Dr. Ted Ralphs IE411 Lecture 14 1 Review: Labeling Algorithm Pros Guaranteed to solve any max flow problem with integral arc capacities Provides constructive tool
Energy Saving Routing Strategies in IP Networks
 Energy Saving Routing Strategies in IP Networks M. Polverini; M. Listanti DIET Department - University of Roma Sapienza, Via Eudossiana 8, 84 Roma, Italy 2 june 24 [scale=.8]figure/logo.eps M. Polverini
Energy Saving Routing Strategies in IP Networks M. Polverini; M. Listanti DIET Department - University of Roma Sapienza, Via Eudossiana 8, 84 Roma, Italy 2 june 24 [scale=.8]figure/logo.eps M. Polverini
Achieving Desirable Gameplay Objectives by Niched Evolution of Game Parameters
 Achieving Desirable Gameplay Objectives by Niched Evolution of Game Parameters Scott Watson, Andrew Vardy, Wolfgang Banzhaf Department of Computer Science Memorial University of Newfoundland St John s.
Achieving Desirable Gameplay Objectives by Niched Evolution of Game Parameters Scott Watson, Andrew Vardy, Wolfgang Banzhaf Department of Computer Science Memorial University of Newfoundland St John s.
Informed search algorithms. Chapter 3 (Based on Slides by Stuart Russell, Richard Korf, Subbarao Kambhampati, and UW-AI faculty)
") Informed search algorithms Chapter 3 (Based on Slides by Stuart Russell, Richard Korf, Subbarao Kambhampati, and UW-AI faculty) Intuition, like the rays of the sun, acts only in an inflexibly straight
Informed search algorithms Chapter 3 (Based on Slides by Stuart Russell, Richard Korf, Subbarao Kambhampati, and UW-AI faculty) Intuition, like the rays of the sun, acts only in an inflexibly straight
Real-Time City-Scale Taxi Ridesharing
 IEEE TRANSACTIONS ON KNOWLEDGE AND DATA ENGINEERING, MANUSCRIPT ID 1 Real-Time City-Scale Taxi Ridesharing Shuo Ma, Yu Zheng, Senior Member, IEEE and Ouri Wolfson, Fellow, IEEE Abstract We proposed and
IEEE TRANSACTIONS ON KNOWLEDGE AND DATA ENGINEERING, MANUSCRIPT ID 1 Real-Time City-Scale Taxi Ridesharing Shuo Ma, Yu Zheng, Senior Member, IEEE and Ouri Wolfson, Fellow, IEEE Abstract We proposed and
Multi-Dimensional Conflict Graph Based Computing for Optimal Capacity in MR-MC Wireless Networks
 Multi-Dimensional Conflict Graph Based Computing for Optimal Capacity in MR-MC Wireless Networks Hongkun Li, Yu Cheng, Chi Zhou Department of Electrical and Computer Engineering Illinois Institute of Technology
Multi-Dimensional Conflict Graph Based Computing for Optimal Capacity in MR-MC Wireless Networks Hongkun Li, Yu Cheng, Chi Zhou Department of Electrical and Computer Engineering Illinois Institute of Technology
Real Time Routing in Road Networks
 Real Time Routing in Road Networks Aakriti Gupta Advisors: Dr. J. Lakshmi, Prof. S. K. Nandy Cloud Systems Lab, CADL, SERC Indian Institute of Science aakriti@cadl.iisc.ernet.in June 19, 2014 Introduction
Real Time Routing in Road Networks Aakriti Gupta Advisors: Dr. J. Lakshmi, Prof. S. K. Nandy Cloud Systems Lab, CADL, SERC Indian Institute of Science aakriti@cadl.iisc.ernet.in June 19, 2014 Introduction
Routing ( Introduction to Computer-Aided Design) School of EECS Seoul National University
 School of EECS Seoul National University") Routing (454.554 Introduction to Computer-Aided Design) School of EECS Seoul National University Introduction Detailed routing Unrestricted Maze routing Line routing Restricted Switch-box routing: fixed
Routing (454.554 Introduction to Computer-Aided Design) School of EECS Seoul National University Introduction Detailed routing Unrestricted Maze routing Line routing Restricted Switch-box routing: fixed
Gateways Placement in Backbone Wireless Mesh Networks
 I. J. Communications, Network and System Sciences, 2009, 1, 1-89 Published Online February 2009 in SciRes (http://www.scirp.org/journal/ijcns/). Gateways Placement in Backbone Wireless Mesh Networks Abstract
I. J. Communications, Network and System Sciences, 2009, 1, 1-89 Published Online February 2009 in SciRes (http://www.scirp.org/journal/ijcns/). Gateways Placement in Backbone Wireless Mesh Networks Abstract
UNIVERSITY of PENNSYLVANIA CIS 391/521: Fundamentals of AI Midterm 1, Spring 2010
 UNIVERSITY of PENNSYLVANIA CIS 391/521: Fundamentals of AI Midterm 1, Spring 2010 Question Points 1 Environments /2 2 Python /18 3 Local and Heuristic Search /35 4 Adversarial Search /20 5 Constraint Satisfaction
UNIVERSITY of PENNSYLVANIA CIS 391/521: Fundamentals of AI Midterm 1, Spring 2010 Question Points 1 Environments /2 2 Python /18 3 Local and Heuristic Search /35 4 Adversarial Search /20 5 Constraint Satisfaction
Interference-Aware Joint Routing and TDMA Link Scheduling for Static Wireless Networks
 Interference-Aware Joint Routing and TDMA Link Scheduling for Static Wireless Networks Yu Wang Weizhao Wang Xiang-Yang Li Wen-Zhan Song Abstract We study efficient interference-aware joint routing and
Interference-Aware Joint Routing and TDMA Link Scheduling for Static Wireless Networks Yu Wang Weizhao Wang Xiang-Yang Li Wen-Zhan Song Abstract We study efficient interference-aware joint routing and
Aircraft routing for on-demand air transportation with service upgrade and maintenance events: compact model and case study
 Aircraft routing for on-demand air transportation with service upgrade and maintenance events: compact model and case study Pedro Munari, Aldair Alvarez Production Engineering Department, Federal University
Aircraft routing for on-demand air transportation with service upgrade and maintenance events: compact model and case study Pedro Munari, Aldair Alvarez Production Engineering Department, Federal University
Wireless Network Coding with Local Network Views: Coded Layer Scheduling
 Wireless Network Coding with Local Network Views: Coded Layer Scheduling Alireza Vahid, Vaneet Aggarwal, A. Salman Avestimehr, and Ashutosh Sabharwal arxiv:06.574v3 [cs.it] 4 Apr 07 Abstract One of the
Wireless Network Coding with Local Network Views: Coded Layer Scheduling Alireza Vahid, Vaneet Aggarwal, A. Salman Avestimehr, and Ashutosh Sabharwal arxiv:06.574v3 [cs.it] 4 Apr 07 Abstract One of the
A GRASP heuristic for the Cooperative Communication Problem in Ad Hoc Networks
 MIC2005: The Sixth Metaheuristics International Conference??-1 A GRASP heuristic for the Cooperative Communication Problem in Ad Hoc Networks Clayton Commander Carlos A.S. Oliveira Panos M. Pardalos Mauricio
MIC2005: The Sixth Metaheuristics International Conference??-1 A GRASP heuristic for the Cooperative Communication Problem in Ad Hoc Networks Clayton Commander Carlos A.S. Oliveira Panos M. Pardalos Mauricio
A Comparative Study of Quality of Service Routing Schemes That Tolerate Imprecise State Information
 A Comparative Study of Quality of Service Routing Schemes That Tolerate Imprecise State Information Xin Yuan Wei Zheng Department of Computer Science, Florida State University, Tallahassee, FL 330 {xyuan,zheng}@cs.fsu.edu
A Comparative Study of Quality of Service Routing Schemes That Tolerate Imprecise State Information Xin Yuan Wei Zheng Department of Computer Science, Florida State University, Tallahassee, FL 330 {xyuan,zheng}@cs.fsu.edu
Ad Hoc Networks 8 (2010) Contents lists available at ScienceDirect. Ad Hoc Networks. journal homepage:
 Contents lists available at ScienceDirect. Ad Hoc Networks. journal homepage:") Ad Hoc Networks 8 (2010) 545 563 Contents lists available at ScienceDirect Ad Hoc Networks journal homepage: www.elsevier.com/locate/adhoc Routing, scheduling and channel assignment in Wireless Mesh Networks:
Ad Hoc Networks 8 (2010) 545 563 Contents lists available at ScienceDirect Ad Hoc Networks journal homepage: www.elsevier.com/locate/adhoc Routing, scheduling and channel assignment in Wireless Mesh Networks:
Column Generation. A short Introduction. Martin Riedler. AC Retreat
 Column Generation A short Introduction Martin Riedler AC Retreat Contents 1 Introduction 2 Motivation 3 Further Notes MR Column Generation June 29 July 1 2 / 13 Basic Idea We already heard about Cutting
Column Generation A short Introduction Martin Riedler AC Retreat Contents 1 Introduction 2 Motivation 3 Further Notes MR Column Generation June 29 July 1 2 / 13 Basic Idea We already heard about Cutting
Part VII: VRP - advanced topics
 Part VII: VRP - advanced topics c R.F. Hartl, S.N. Parragh 1/32 Overview Dealing with TW and duration constraints Solving VRP to optimality c R.F. Hartl, S.N. Parragh 2/32 Dealing with TW and duration
Part VII: VRP - advanced topics c R.F. Hartl, S.N. Parragh 1/32 Overview Dealing with TW and duration constraints Solving VRP to optimality c R.F. Hartl, S.N. Parragh 2/32 Dealing with TW and duration
Game Theory and Randomized Algorithms
 Game Theory and Randomized Algorithms Guy Aridor Game theory is a set of tools that allow us to understand how decisionmakers interact with each other. It has practical applications in economics, international
Game Theory and Randomized Algorithms Guy Aridor Game theory is a set of tools that allow us to understand how decisionmakers interact with each other. It has practical applications in economics, international
Distributed Collaborative Path Planning in Sensor Networks with Multiple Mobile Sensor Nodes
 7th Mediterranean Conference on Control & Automation Makedonia Palace, Thessaloniki, Greece June 4-6, 009 Distributed Collaborative Path Planning in Sensor Networks with Multiple Mobile Sensor Nodes Theofanis
7th Mediterranean Conference on Control & Automation Makedonia Palace, Thessaloniki, Greece June 4-6, 009 Distributed Collaborative Path Planning in Sensor Networks with Multiple Mobile Sensor Nodes Theofanis
Optimized Schedule Synthesis under Real-Time Constraints for the Dynamic Segment of FlexRay
 2010 IEEE/IFIP International Conference on Embedded and Ubiquitous Computing Optimized Schedule Synthesis under Real-Time Constraints for the Dynamic Segment of FlexRay Reinhard Schneider, Unmesh Bordoloi,
2010 IEEE/IFIP International Conference on Embedded and Ubiquitous Computing Optimized Schedule Synthesis under Real-Time Constraints for the Dynamic Segment of FlexRay Reinhard Schneider, Unmesh Bordoloi,
Wavelength Assignment Problem in Optical WDM Networks
 Wavelength Assignment Problem in Optical WDM Networks A. Sangeetha,K.Anusudha 2,Shobhit Mathur 3 and Manoj Kumar Chaluvadi 4 asangeetha@vit.ac.in 2 Kanusudha@vit.ac.in 2 3 shobhitmathur24@gmail.com 3 4
Wavelength Assignment Problem in Optical WDM Networks A. Sangeetha,K.Anusudha 2,Shobhit Mathur 3 and Manoj Kumar Chaluvadi 4 asangeetha@vit.ac.in 2 Kanusudha@vit.ac.in 2 3 shobhitmathur24@gmail.com 3 4
A GRASP HEURISTIC FOR THE COOPERATIVE COMMUNICATION PROBLEM IN AD HOC NETWORKS
 A GRASP HEURISTIC FOR THE COOPERATIVE COMMUNICATION PROBLEM IN AD HOC NETWORKS C. COMMANDER, C.A.S. OLIVEIRA, P.M. PARDALOS, AND M.G.C. RESENDE ABSTRACT. Ad hoc networks are composed of a set of wireless
A GRASP HEURISTIC FOR THE COOPERATIVE COMMUNICATION PROBLEM IN AD HOC NETWORKS C. COMMANDER, C.A.S. OLIVEIRA, P.M. PARDALOS, AND M.G.C. RESENDE ABSTRACT. Ad hoc networks are composed of a set of wireless
How (Information Theoretically) Optimal Are Distributed Decisions?
 Optimal Are Distributed Decisions?") How (Information Theoretically) Optimal Are Distributed Decisions? Vaneet Aggarwal Department of Electrical Engineering, Princeton University, Princeton, NJ 08544. vaggarwa@princeton.edu Salman Avestimehr
How (Information Theoretically) Optimal Are Distributed Decisions? Vaneet Aggarwal Department of Electrical Engineering, Princeton University, Princeton, NJ 08544. vaggarwa@princeton.edu Salman Avestimehr
Eric J. Nava Department of Civil Engineering and Engineering Mechanics, University of Arizona,
 A Temporal Domain Decomposition Algorithmic Scheme for Efficient Mega-Scale Dynamic Traffic Assignment An Experience with Southern California Associations of Government (SCAG) DTA Model Yi-Chang Chiu 1
A Temporal Domain Decomposition Algorithmic Scheme for Efficient Mega-Scale Dynamic Traffic Assignment An Experience with Southern California Associations of Government (SCAG) DTA Model Yi-Chang Chiu 1
Greedy Algorithms. Kleinberg and Tardos, Chapter 4
 Greedy Algorithms Kleinberg and Tardos, Chapter 4 1 Selecting gas stations Road trip from Fort Collins to Durango on a given route with length L, and fuel stations at positions b i. Fuel capacity = C miles.
Greedy Algorithms Kleinberg and Tardos, Chapter 4 1 Selecting gas stations Road trip from Fort Collins to Durango on a given route with length L, and fuel stations at positions b i. Fuel capacity = C miles.
Traffic Grooming for WDM Rings with Dynamic Traffic
 1 Traffic Grooming for WDM Rings with Dynamic Traffic Chenming Zhao J.Q. Hu Department of Manufacturing Engineering Boston University 15 St. Mary s Street Brookline, MA 02446 Abstract We study the problem
1 Traffic Grooming for WDM Rings with Dynamic Traffic Chenming Zhao J.Q. Hu Department of Manufacturing Engineering Boston University 15 St. Mary s Street Brookline, MA 02446 Abstract We study the problem
Lecture Notes 3: Paging, K-Server and Metric Spaces
 Online Algorithms 16/11/11 Lecture Notes 3: Paging, K-Server and Metric Spaces Professor: Yossi Azar Scribe:Maor Dan 1 Introduction This lecture covers the Paging problem. We present a competitive online
Online Algorithms 16/11/11 Lecture Notes 3: Paging, K-Server and Metric Spaces Professor: Yossi Azar Scribe:Maor Dan 1 Introduction This lecture covers the Paging problem. We present a competitive online
Connected Identifying Codes
 Connected Identifying Codes Niloofar Fazlollahi, David Starobinski and Ari Trachtenberg Dept. of Electrical and Computer Engineering Boston University, Boston, MA 02215 Email: {nfazl,staro,trachten}@bu.edu
Connected Identifying Codes Niloofar Fazlollahi, David Starobinski and Ari Trachtenberg Dept. of Electrical and Computer Engineering Boston University, Boston, MA 02215 Email: {nfazl,staro,trachten}@bu.edu
Link and Link Impedance 2018/02/13. VECTOR DATA ANALYSIS Network Analysis TYPES OF OPERATIONS
 VECTOR DATA ANALYSIS Network Analysis A network is a system of linear features that has the appropriate attributes for the flow of objects. A network is typically topology-based: lines (arcs) meet at intersections
VECTOR DATA ANALYSIS Network Analysis A network is a system of linear features that has the appropriate attributes for the flow of objects. A network is typically topology-based: lines (arcs) meet at intersections
INTERNATIONAL CONFERENCE ON ENGINEERING DESIGN ICED 01 GLASGOW, AUGUST 21-23, 2001
 INTERNATIONAL CONFERENCE ON ENGINEERING DESIGN ICED 01 GLASGOW, AUGUST 21-23, 2001 DESIGN OF PART FAMILIES FOR RECONFIGURABLE MACHINING SYSTEMS BASED ON MANUFACTURABILITY FEEDBACK Byungwoo Lee and Kazuhiro
INTERNATIONAL CONFERENCE ON ENGINEERING DESIGN ICED 01 GLASGOW, AUGUST 21-23, 2001 DESIGN OF PART FAMILIES FOR RECONFIGURABLE MACHINING SYSTEMS BASED ON MANUFACTURABILITY FEEDBACK Byungwoo Lee and Kazuhiro
STRATEGY AND COMPLEXITY OF THE GAME OF SQUARES
 STRATEGY AND COMPLEXITY OF THE GAME OF SQUARES FLORIAN BREUER and JOHN MICHAEL ROBSON Abstract We introduce a game called Squares where the single player is presented with a pattern of black and white
STRATEGY AND COMPLEXITY OF THE GAME OF SQUARES FLORIAN BREUER and JOHN MICHAEL ROBSON Abstract We introduce a game called Squares where the single player is presented with a pattern of black and white
Modeling, Analysis and Optimization of Networks. Alberto Ceselli
 Modeling, Analysis and Optimization of Networks Alberto Ceselli alberto.ceselli@unimi.it Università degli Studi di Milano Dipartimento di Informatica Doctoral School in Computer Science A.A. 2015/2016
Modeling, Analysis and Optimization of Networks Alberto Ceselli alberto.ceselli@unimi.it Università degli Studi di Milano Dipartimento di Informatica Doctoral School in Computer Science A.A. 2015/2016
p-percent Coverage in Wireless Sensor Networks
 p-percent Coverage in Wireless Sensor Networks Yiwei Wu, Chunyu Ai, Shan Gao and Yingshu Li Department of Computer Science Georgia State University October 28, 2008 1 Introduction 2 p-percent Coverage
p-percent Coverage in Wireless Sensor Networks Yiwei Wu, Chunyu Ai, Shan Gao and Yingshu Li Department of Computer Science Georgia State University October 28, 2008 1 Introduction 2 p-percent Coverage
3644 IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. 57, NO. 6, JUNE 2011
 3644 IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. 57, NO. 6, JUNE 2011 Asynchronous CSMA Policies in Multihop Wireless Networks With Primary Interference Constraints Peter Marbach, Member, IEEE, Atilla
3644 IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. 57, NO. 6, JUNE 2011 Asynchronous CSMA Policies in Multihop Wireless Networks With Primary Interference Constraints Peter Marbach, Member, IEEE, Atilla
An applied optimization based method for line planning to minimize travel time
 Downloaded from orbit.dtu.dk on: Dec 15, 2017 An applied optimization based method for line planning to minimize travel time Bull, Simon Henry; Rezanova, Natalia Jurjevna; Lusby, Richard Martin ; Larsen,
Downloaded from orbit.dtu.dk on: Dec 15, 2017 An applied optimization based method for line planning to minimize travel time Bull, Simon Henry; Rezanova, Natalia Jurjevna; Lusby, Richard Martin ; Larsen,
Approches basées sur les métaheuristiques pour la gestion de flotte en temps réel
 Approches basées sur les métaheuristiques pour la gestion de flotte en temps réel Frédéric SEMET LAMIH, UMR CNRS, Université de Valenciennes Motivation Réseau terrestre (GSM) Telecommunication GPS laptop
Approches basées sur les métaheuristiques pour la gestion de flotte en temps réel Frédéric SEMET LAMIH, UMR CNRS, Université de Valenciennes Motivation Réseau terrestre (GSM) Telecommunication GPS laptop
Uncertainty Feature Optimization for the Airline Scheduling Problem
 1 Uncertainty Feature Optimization for the Airline Scheduling Problem Niklaus Eggenberg Dr. Matteo Salani Funded by Swiss National Science Foundation (SNSF) 2 Outline Uncertainty Feature Optimization (UFO)
1 Uncertainty Feature Optimization for the Airline Scheduling Problem Niklaus Eggenberg Dr. Matteo Salani Funded by Swiss National Science Foundation (SNSF) 2 Outline Uncertainty Feature Optimization (UFO)
Transportation Timetabling
 Outline DM87 SCHEDULING, TIMETABLING AND ROUTING 1. Sports Timetabling Lecture 16 Transportation Timetabling Marco Chiarandini 2. Transportation Timetabling Tanker Scheduling Air Transport Train Timetabling
Outline DM87 SCHEDULING, TIMETABLING AND ROUTING 1. Sports Timetabling Lecture 16 Transportation Timetabling Marco Chiarandini 2. Transportation Timetabling Tanker Scheduling Air Transport Train Timetabling
CS 229 Final Project: Using Reinforcement Learning to Play Othello
 CS 229 Final Project: Using Reinforcement Learning to Play Othello Kevin Fry Frank Zheng Xianming Li ID: kfry ID: fzheng ID: xmli 16 December 2016 Abstract We built an AI that learned to play Othello.
CS 229 Final Project: Using Reinforcement Learning to Play Othello Kevin Fry Frank Zheng Xianming Li ID: kfry ID: fzheng ID: xmli 16 December 2016 Abstract We built an AI that learned to play Othello.
Variable Bit Rate Transmission Schedule Generation in Green Vehicular Roadside Units
 Variable Bit Rate Transmission Schedule Generation in Green Vehicular Roadside Units Abdulla A. Hammad 1, Terence D. Todd 1 and George Karakostas 2 1 Department of Electrical and Computer Engineering McMaster
Variable Bit Rate Transmission Schedule Generation in Green Vehicular Roadside Units Abdulla A. Hammad 1, Terence D. Todd 1 and George Karakostas 2 1 Department of Electrical and Computer Engineering McMaster
Research Statement MAXIM LIKHACHEV
 Research Statement MAXIM LIKHACHEV My long-term research goal is to develop a methodology for robust real-time decision-making in autonomous systems. To achieve this goal, my students and I research novel
Research Statement MAXIM LIKHACHEV My long-term research goal is to develop a methodology for robust real-time decision-making in autonomous systems. To achieve this goal, my students and I research novel
Near Optimal Joint Channel and Power Allocation Algorithms in Multicell Networks
 Near Optimal Joint Channel and Power Allocation Algorithms in Multicell Networks Master Thesis within Optimization and s Theory HILDUR ÆSA ODDSDÓTTIR Supervisors: Co-Supervisor: Gabor Fodor, Ericsson Research,
Near Optimal Joint Channel and Power Allocation Algorithms in Multicell Networks Master Thesis within Optimization and s Theory HILDUR ÆSA ODDSDÓTTIR Supervisors: Co-Supervisor: Gabor Fodor, Ericsson Research,
Optimal Multicast Routing in Ad Hoc Networks
 Mat-2.108 Independent esearch Projects in Applied Mathematics Optimal Multicast outing in Ad Hoc Networks Juha Leino 47032J Juha.Leino@hut.fi 1st December 2002 Contents 1 Introduction 2 2 Optimal Multicasting
Mat-2.108 Independent esearch Projects in Applied Mathematics Optimal Multicast outing in Ad Hoc Networks Juha Leino 47032J Juha.Leino@hut.fi 1st December 2002 Contents 1 Introduction 2 2 Optimal Multicasting
Optimization Techniques for Alphabet-Constrained Signal Design
 Optimization Techniques for Alphabet-Constrained Signal Design Mojtaba Soltanalian Department of Electrical Engineering California Institute of Technology Stanford EE- ISL Mar. 2015 Optimization Techniques
Optimization Techniques for Alphabet-Constrained Signal Design Mojtaba Soltanalian Department of Electrical Engineering California Institute of Technology Stanford EE- ISL Mar. 2015 Optimization Techniques
CONTENTS PREFACE. Part One THE DESIGN PROCESS: PROPERTIES, PARADIGMS AND THE EVOLUTIONARY STRUCTURE
 Copyrighted Material Dan Braha and Oded Maimon, A Mathematical Theory of Design: Foundations, Algorithms, and Applications, Springer, 1998, 708 p., Hardcover, ISBN: 0-7923-5079-0. PREFACE Part One THE
Copyrighted Material Dan Braha and Oded Maimon, A Mathematical Theory of Design: Foundations, Algorithms, and Applications, Springer, 1998, 708 p., Hardcover, ISBN: 0-7923-5079-0. PREFACE Part One THE
Greedy Flipping of Pancakes and Burnt Pancakes
 Greedy Flipping of Pancakes and Burnt Pancakes Joe Sawada a, Aaron Williams b a School of Computer Science, University of Guelph, Canada. Research supported by NSERC. b Department of Mathematics and Statistics,
Greedy Flipping of Pancakes and Burnt Pancakes Joe Sawada a, Aaron Williams b a School of Computer Science, University of Guelph, Canada. Research supported by NSERC. b Department of Mathematics and Statistics,
3432 IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. 53, NO. 10, OCTOBER 2007
 3432 IEEE TRANSACTIONS ON INFORMATION THEORY, VOL 53, NO 10, OCTOBER 2007 Resource Allocation for Wireless Fading Relay Channels: Max-Min Solution Yingbin Liang, Member, IEEE, Venugopal V Veeravalli, Fellow,
3432 IEEE TRANSACTIONS ON INFORMATION THEORY, VOL 53, NO 10, OCTOBER 2007 Resource Allocation for Wireless Fading Relay Channels: Max-Min Solution Yingbin Liang, Member, IEEE, Venugopal V Veeravalli, Fellow,
Lossy Compression of Permutations
 204 IEEE International Symposium on Information Theory Lossy Compression of Permutations Da Wang EECS Dept., MIT Cambridge, MA, USA Email: dawang@mit.edu Arya Mazumdar ECE Dept., Univ. of Minnesota Twin
204 IEEE International Symposium on Information Theory Lossy Compression of Permutations Da Wang EECS Dept., MIT Cambridge, MA, USA Email: dawang@mit.edu Arya Mazumdar ECE Dept., Univ. of Minnesota Twin
MRN -4 Frequency Reuse
 Politecnico di Milano Facoltà di Ingegneria dell Informazione MRN -4 Frequency Reuse Mobile Radio Networks Prof. Antonio Capone Assignment of channels to cells o The multiple access technique in cellular
Politecnico di Milano Facoltà di Ingegneria dell Informazione MRN -4 Frequency Reuse Mobile Radio Networks Prof. Antonio Capone Assignment of channels to cells o The multiple access technique in cellular
Mobile Terminal Energy Management for Sustainable Multi-homing Video Transmission
 1 Mobile Terminal Energy Management for Sustainable Multi-homing Video Transmission Muhammad Ismail, Member, IEEE, and Weihua Zhuang, Fellow, IEEE Abstract In this paper, an energy management sub-system
1 Mobile Terminal Energy Management for Sustainable Multi-homing Video Transmission Muhammad Ismail, Member, IEEE, and Weihua Zhuang, Fellow, IEEE Abstract In this paper, an energy management sub-system
Energy-Balanced Cooperative Routing in Multihop Wireless Ad Hoc Networks
 Energy-Balanced Cooperative Routing in Multihop Wireless Ad Hoc Networs Siyuan Chen Minsu Huang Yang Li Ying Zhu Yu Wang Department of Computer Science, University of North Carolina at Charlotte, Charlotte,
Energy-Balanced Cooperative Routing in Multihop Wireless Ad Hoc Networs Siyuan Chen Minsu Huang Yang Li Ying Zhu Yu Wang Department of Computer Science, University of North Carolina at Charlotte, Charlotte,
Free Cell Solver. Copyright 2001 Kevin Atkinson Shari Holstege December 11, 2001
 Free Cell Solver Copyright 2001 Kevin Atkinson Shari Holstege December 11, 2001 Abstract We created an agent that plays the Free Cell version of Solitaire by searching through the space of possible sequences
Free Cell Solver Copyright 2001 Kevin Atkinson Shari Holstege December 11, 2001 Abstract We created an agent that plays the Free Cell version of Solitaire by searching through the space of possible sequences
An improved strategy for solving Sudoku by sparse optimization methods
 An improved strategy for solving Sudoku by sparse optimization methods Yuchao Tang, Zhenggang Wu 2, Chuanxi Zhu. Department of Mathematics, Nanchang University, Nanchang 33003, P.R. China 2. School of
An improved strategy for solving Sudoku by sparse optimization methods Yuchao Tang, Zhenggang Wu 2, Chuanxi Zhu. Department of Mathematics, Nanchang University, Nanchang 33003, P.R. China 2. School of
On the Capacity of Multi-Hop Wireless Networks with Partial Network Knowledge
 On the Capacity of Multi-Hop Wireless Networks with Partial Network Knowledge Alireza Vahid Cornell University Ithaca, NY, USA. av292@cornell.edu Vaneet Aggarwal Princeton University Princeton, NJ, USA.
On the Capacity of Multi-Hop Wireless Networks with Partial Network Knowledge Alireza Vahid Cornell University Ithaca, NY, USA. av292@cornell.edu Vaneet Aggarwal Princeton University Princeton, NJ, USA.
S8223: Simulating a City: GPU Simulations of Traffic, Crowds and Beyond
 S8223: Simulating a City: GPU Simulations of Traffic, Crowds and Beyond Dr Paul Richmond Contributors: Peter Heywood, Robert Chisholm, Mozhgan Kabiri-Chimeh, John Charlton & Steve Maddock Context: Everyone
S8223: Simulating a City: GPU Simulations of Traffic, Crowds and Beyond Dr Paul Richmond Contributors: Peter Heywood, Robert Chisholm, Mozhgan Kabiri-Chimeh, John Charlton & Steve Maddock Context: Everyone
Optimal Utility-Based Resource Allocation for OFDM Networks with Multiple Types of Traffic
 Optimal Utility-Based Resource Allocation for OFDM Networks with Multiple Types of Traffic Mohammad Katoozian, Keivan Navaie Electrical and Computer Engineering Department Tarbiat Modares University, Tehran,
Optimal Utility-Based Resource Allocation for OFDM Networks with Multiple Types of Traffic Mohammad Katoozian, Keivan Navaie Electrical and Computer Engineering Department Tarbiat Modares University, Tehran,
Surveillance strategies for autonomous mobile robots. Nicola Basilico Department of Computer Science University of Milan
 Surveillance strategies for autonomous mobile robots Nicola Basilico Department of Computer Science University of Milan Intelligence, surveillance, and reconnaissance (ISR) with autonomous UAVs ISR defines
Surveillance strategies for autonomous mobile robots Nicola Basilico Department of Computer Science University of Milan Intelligence, surveillance, and reconnaissance (ISR) with autonomous UAVs ISR defines
The School Bus Routing and Scheduling Problem with Transfers
 The School Bus Routing and Scheduling Problem with Transfers Michael Bögl Christian Doppler Laboratory for efficient intermodal transport operations, Johannes Kepler University Linz, Altenberger Straße
The School Bus Routing and Scheduling Problem with Transfers Michael Bögl Christian Doppler Laboratory for efficient intermodal transport operations, Johannes Kepler University Linz, Altenberger Straße
Solution of the Airline ToD Problem using Severely Limited Subsequence
 Solution of the Airline ToD Problem using Severely Limited Subsequence James Priestley Department of Engineering Science University of Auckland New Zealand j.priestley@aucland.ac.nz Abstract The minimum-cost
Solution of the Airline ToD Problem using Severely Limited Subsequence James Priestley Department of Engineering Science University of Auckland New Zealand j.priestley@aucland.ac.nz Abstract The minimum-cost
Road Traffic Estimation from Multiple GPS Data Using Incremental Weighted Update
 Road Traffic Estimation from Multiple GPS Data Using Incremental Weighted Update S. Sananmongkhonchai 1, P. Tangamchit 1, and P. Pongpaibool 2 1 King Mongkut s University of Technology Thonburi, Bangkok,
Road Traffic Estimation from Multiple GPS Data Using Incremental Weighted Update S. Sananmongkhonchai 1, P. Tangamchit 1, and P. Pongpaibool 2 1 King Mongkut s University of Technology Thonburi, Bangkok,
Railway disruption management
 Railway disruption management 4 5 6 7 8 Delft Center for Systems and Control Railway disruption management For the degree of Master of Science in Systems and Control at Delft University of Technology
Railway disruption management 4 5 6 7 8 Delft Center for Systems and Control Railway disruption management For the degree of Master of Science in Systems and Control at Delft University of Technology
ABM-DTA Deep Integration: Results from the Columbus and Atlanta SHRP C10 Implementations
 ABM-DTA Deep Integration: Results from the Columbus and Atlanta SHRP C10 Implementations presented by Matt Stratton, WSP USA October 17, 2017 New CT-RAMP Integrable w/dta Enhanced temporal resolution:
ABM-DTA Deep Integration: Results from the Columbus and Atlanta SHRP C10 Implementations presented by Matt Stratton, WSP USA October 17, 2017 New CT-RAMP Integrable w/dta Enhanced temporal resolution:
Generalized Game Trees
 Generalized Game Trees Richard E. Korf Computer Science Department University of California, Los Angeles Los Angeles, Ca. 90024 Abstract We consider two generalizations of the standard two-player game
Generalized Game Trees Richard E. Korf Computer Science Department University of California, Los Angeles Los Angeles, Ca. 90024 Abstract We consider two generalizations of the standard two-player game
Mobile Robot Task Allocation in Hybrid Wireless Sensor Networks
 Mobile Robot Task Allocation in Hybrid Wireless Sensor Networks Brian Coltin and Manuela Veloso Abstract Hybrid sensor networks consisting of both inexpensive static wireless sensors and highly capable
Mobile Robot Task Allocation in Hybrid Wireless Sensor Networks Brian Coltin and Manuela Veloso Abstract Hybrid sensor networks consisting of both inexpensive static wireless sensors and highly capable
Design of Parallel Algorithms. Communication Algorithms
 + Design of Parallel Algorithms Communication Algorithms + Topic Overview n One-to-All Broadcast and All-to-One Reduction n All-to-All Broadcast and Reduction n All-Reduce and Prefix-Sum Operations n Scatter
+ Design of Parallel Algorithms Communication Algorithms + Topic Overview n One-to-All Broadcast and All-to-One Reduction n All-to-All Broadcast and Reduction n All-Reduce and Prefix-Sum Operations n Scatter
Set 4: Game-Playing. ICS 271 Fall 2017 Kalev Kask
 Set 4: Game-Playing ICS 271 Fall 2017 Kalev Kask Overview Computer programs that play 2-player games game-playing as search with the complication of an opponent General principles of game-playing and search
Set 4: Game-Playing ICS 271 Fall 2017 Kalev Kask Overview Computer programs that play 2-player games game-playing as search with the complication of an opponent General principles of game-playing and search
IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 58, NO. 3, MARCH
 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 58, NO. 3, MARCH 2010 1401 Decomposition Principles and Online Learning in Cross-Layer Optimization for Delay-Sensitive Applications Fangwen Fu, Student Member,
IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 58, NO. 3, MARCH 2010 1401 Decomposition Principles and Online Learning in Cross-Layer Optimization for Delay-Sensitive Applications Fangwen Fu, Student Member,
Joint Scheduling and Fast Cell Selection in OFDMA Wireless Networks
 1 Joint Scheduling and Fast Cell Selection in OFDMA Wireless Networks Reuven Cohen Guy Grebla Department of Computer Science Technion Israel Institute of Technology Haifa 32000, Israel Abstract In modern
1 Joint Scheduling and Fast Cell Selection in OFDMA Wireless Networks Reuven Cohen Guy Grebla Department of Computer Science Technion Israel Institute of Technology Haifa 32000, Israel Abstract In modern
A Dynamic Resource Sharing Mechanism for Cloud Radio Access Networks
 A Dynamic Resource Sharing Mechanism for Cloud Radio Access Networks Binglai Niu, Yong Zhou, Member, IEEE, Hamed Shah-Mansouri, Member, IEEE, and Vincent W.S. Wong, Fellow, IEEE Abstract Cloud radio access
A Dynamic Resource Sharing Mechanism for Cloud Radio Access Networks Binglai Niu, Yong Zhou, Member, IEEE, Hamed Shah-Mansouri, Member, IEEE, and Vincent W.S. Wong, Fellow, IEEE Abstract Cloud radio access
Trip Assignment. Lecture Notes in Transportation Systems Engineering. Prof. Tom V. Mathew. 1 Overview 1. 2 Link cost function 2
 Trip Assignment Lecture Notes in Transportation Systems Engineering Prof. Tom V. Mathew Contents 1 Overview 1 2 Link cost function 2 3 All-or-nothing assignment 3 4 User equilibrium assignment (UE) 3 5
Trip Assignment Lecture Notes in Transportation Systems Engineering Prof. Tom V. Mathew Contents 1 Overview 1 2 Link cost function 2 3 All-or-nothing assignment 3 4 User equilibrium assignment (UE) 3 5
Multi-class Services in the Internet
 Non-convex Optimization and Rate Control for Multi-class Services in the Internet Jang-Won Lee, Ravi R. Mazumdar, and Ness B. Shroff School of Electrical and Computer Engineering Purdue University West
Non-convex Optimization and Rate Control for Multi-class Services in the Internet Jang-Won Lee, Ravi R. Mazumdar, and Ness B. Shroff School of Electrical and Computer Engineering Purdue University West
A Backlog-Based CSMA Mechanism to Achieve Fairness and Throughput-Optimality in Multihop Wireless Networks
 A Backlog-Based CSMA Mechanism to Achieve Fairness and Throughput-Optimality in Multihop Wireless Networks Peter Marbach, and Atilla Eryilmaz Dept. of Computer Science, University of Toronto Email: marbach@cs.toronto.edu
A Backlog-Based CSMA Mechanism to Achieve Fairness and Throughput-Optimality in Multihop Wireless Networks Peter Marbach, and Atilla Eryilmaz Dept. of Computer Science, University of Toronto Email: marbach@cs.toronto.edu
Programming an Othello AI Michael An (man4), Evan Liang (liange)
, Evan Liang (liange)") Programming an Othello AI Michael An (man4), Evan Liang (liange) 1 Introduction Othello is a two player board game played on an 8 8 grid. Players take turns placing stones with their assigned color (black
Programming an Othello AI Michael An (man4), Evan Liang (liange) 1 Introduction Othello is a two player board game played on an 8 8 grid. Players take turns placing stones with their assigned color (black
arxiv: v1 [cs.it] 21 Feb 2015
![arxiv: v1 [cs.it] 21 Feb 2015](/thumbs/90/102853318.jpg "arxiv: v1 [cs.it] 21 Feb 2015") 1 Opportunistic Cooperative Channel Access in Distributed Wireless Networks with Decode-and-Forward Relays Zhou Zhang, Shuai Zhou, and Hai Jiang arxiv:1502.06085v1 [cs.it] 21 Feb 2015 Dept. of Electrical
1 Opportunistic Cooperative Channel Access in Distributed Wireless Networks with Decode-and-Forward Relays Zhou Zhang, Shuai Zhou, and Hai Jiang arxiv:1502.06085v1 [cs.it] 21 Feb 2015 Dept. of Electrical
Introduction to Algorithms / Algorithms I Lecturer: Michael Dinitz Topic: Algorithms and Game Theory Date: 12/4/14
 600.363 Introduction to Algorithms / 600.463 Algorithms I Lecturer: Michael Dinitz Topic: Algorithms and Game Theory Date: 12/4/14 25.1 Introduction Today we re going to spend some time discussing game
600.363 Introduction to Algorithms / 600.463 Algorithms I Lecturer: Michael Dinitz Topic: Algorithms and Game Theory Date: 12/4/14 25.1 Introduction Today we re going to spend some time discussing game
A Virtual Deadline Scheduler for Window-Constrained Service Guarantees
 Boston University OpenBU Computer Science http://open.bu.edu CAS: Computer Science: Technical Reports 2004-03-23 A Virtual Deadline Scheduler for Window-Constrained Service Guarantees Zhang, Yuting Boston
Boston University OpenBU Computer Science http://open.bu.edu CAS: Computer Science: Technical Reports 2004-03-23 A Virtual Deadline Scheduler for Window-Constrained Service Guarantees Zhang, Yuting Boston
Fast Sorting and Pattern-Avoiding Permutations
 Fast Sorting and Pattern-Avoiding Permutations David Arthur Stanford University darthur@cs.stanford.edu Abstract We say a permutation π avoids a pattern σ if no length σ subsequence of π is ordered in
Fast Sorting and Pattern-Avoiding Permutations David Arthur Stanford University darthur@cs.stanford.edu Abstract We say a permutation π avoids a pattern σ if no length σ subsequence of π is ordered in
Time-average constraints in stochastic Model Predictive Control
 Time-average constraints in stochastic Model Predictive Control James Fleming Mark Cannon ACC, May 2017 James Fleming, Mark Cannon Time-average constraints in stochastic MPC ACC, May 2017 1 / 24 Outline
Time-average constraints in stochastic Model Predictive Control James Fleming Mark Cannon ACC, May 2017 James Fleming, Mark Cannon Time-average constraints in stochastic MPC ACC, May 2017 1 / 24 Outline
Channel Sensing Order in Multi-user Cognitive Radio Networks
 2012 IEEE International Symposium on Dynamic Spectrum Access Networks Channel Sensing Order in Multi-user Cognitive Radio Networks Jie Zhao and Xin Wang Department of Electrical and Computer Engineering
2012 IEEE International Symposium on Dynamic Spectrum Access Networks Channel Sensing Order in Multi-user Cognitive Radio Networks Jie Zhao and Xin Wang Department of Electrical and Computer Engineering
W CDMA Network Design
 Technical Report 03-EMIS-02 W CDMA Network Design Qibin Cai 1 Joakim Kalvenes 2 Jeffery Kennington 1 Eli Olinick 1 1 {qcai,jlk,olinick}@engr.smu.edu School of Engineering Southern Methodist University
Technical Report 03-EMIS-02 W CDMA Network Design Qibin Cai 1 Joakim Kalvenes 2 Jeffery Kennington 1 Eli Olinick 1 1 {qcai,jlk,olinick}@engr.smu.edu School of Engineering Southern Methodist University
Complete and Incomplete Algorithms for the Queen Graph Coloring Problem
 Complete and Incomplete Algorithms for the Queen Graph Coloring Problem Michel Vasquez and Djamal Habet 1 Abstract. The queen graph coloring problem consists in covering a n n chessboard with n queens,
Complete and Incomplete Algorithms for the Queen Graph Coloring Problem Michel Vasquez and Djamal Habet 1 Abstract. The queen graph coloring problem consists in covering a n n chessboard with n queens,
Multi-Dimensional Conflict Graph Based Computing for Optimal Capacity in MR-MC Wireless Networks
 Multi-Dimensional Conflict Graph Based Computing for Optimal Capacity in MR-MC Wireless Networks Hongkun Li, Yu Cheng, Chi Zhou Dept. Electrical & Computer Engineering Illinois Institute of Technology
Multi-Dimensional Conflict Graph Based Computing for Optimal Capacity in MR-MC Wireless Networks Hongkun Li, Yu Cheng, Chi Zhou Dept. Electrical & Computer Engineering Illinois Institute of Technology
Joint Transmitter-Receiver Adaptive Forward-Link DS-CDMA System
 # - Joint Transmitter-Receiver Adaptive orward-link D-CDMA ystem Li Gao and Tan. Wong Department of Electrical & Computer Engineering University of lorida Gainesville lorida 3-3 Abstract A joint transmitter-receiver
# - Joint Transmitter-Receiver Adaptive orward-link D-CDMA ystem Li Gao and Tan. Wong Department of Electrical & Computer Engineering University of lorida Gainesville lorida 3-3 Abstract A joint transmitter-receiver
Chapter 12. Cross-Layer Optimization for Multi- Hop Cognitive Radio Networks
 Chapter 12 Cross-Layer Optimization for Multi- Hop Cognitive Radio Networks 1 Outline CR network (CRN) properties Mathematical models at multiple layers Case study 2 Traditional Radio vs CR Traditional
Chapter 12 Cross-Layer Optimization for Multi- Hop Cognitive Radio Networks 1 Outline CR network (CRN) properties Mathematical models at multiple layers Case study 2 Traditional Radio vs CR Traditional
Hamming Codes as Error-Reducing Codes
 Hamming Codes as Error-Reducing Codes William Rurik Arya Mazumdar Abstract Hamming codes are the first nontrivial family of error-correcting codes that can correct one error in a block of binary symbols.
Hamming Codes as Error-Reducing Codes William Rurik Arya Mazumdar Abstract Hamming codes are the first nontrivial family of error-correcting codes that can correct one error in a block of binary symbols.
AI Approaches to Ultimate Tic-Tac-Toe
 AI Approaches to Ultimate Tic-Tac-Toe Eytan Lifshitz CS Department Hebrew University of Jerusalem, Israel David Tsurel CS Department Hebrew University of Jerusalem, Israel I. INTRODUCTION This report is
AI Approaches to Ultimate Tic-Tac-Toe Eytan Lifshitz CS Department Hebrew University of Jerusalem, Israel David Tsurel CS Department Hebrew University of Jerusalem, Israel I. INTRODUCTION This report is
THE WIRELESS NETWORK JAMMING PROBLEM
 THE WIRELESS NETWORK JAMMING PROBLEM CLAYTON W. COMMANDER, PANOS M. PARDALOS, VALERIY RYABCHENKO, STAN URYASEV, AND GRIGORIY ZRAZHEVSKY ABSTRACT. In adversarial environments, disabling the communication
THE WIRELESS NETWORK JAMMING PROBLEM CLAYTON W. COMMANDER, PANOS M. PARDALOS, VALERIY RYABCHENKO, STAN URYASEV, AND GRIGORIY ZRAZHEVSKY ABSTRACT. In adversarial environments, disabling the communication
Low-Latency Multi-Source Broadcast in Radio Networks
 Low-Latency Multi-Source Broadcast in Radio Networks Scott C.-H. Huang City University of Hong Kong Hsiao-Chun Wu Louisiana State University and S. S. Iyengar Louisiana State University In recent years
Low-Latency Multi-Source Broadcast in Radio Networks Scott C.-H. Huang City University of Hong Kong Hsiao-Chun Wu Louisiana State University and S. S. Iyengar Louisiana State University In recent years