Robot-Cub Outline. Robotcub 1 st Open Day Genova July 14, 2005
|
|
|
- Magdalen Carson
- 5 years ago
- Views:
Transcription
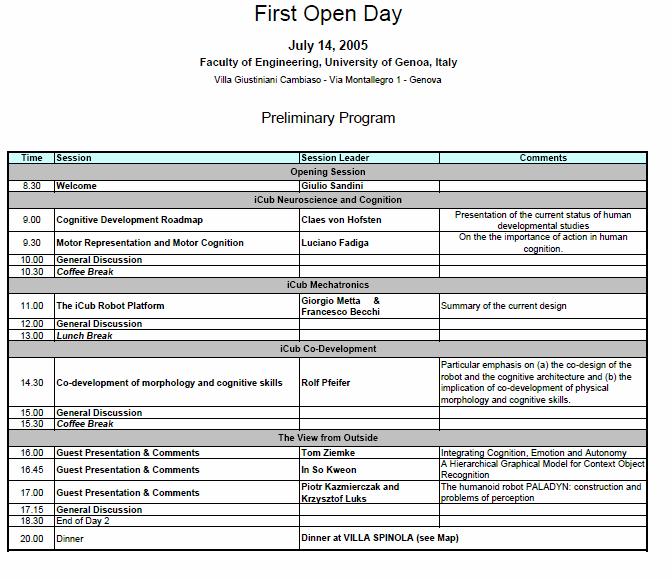
1 Robot-Cub Outline Robotcub 1 st Open Day Genova July 14, 2005
2 Main Keywords Cognition (manipulation) Human Development Embodiment Community Building
3 Two Goals or a two-fold Goal? Create a physical platform for embodied cognitive research Advance our understanding of several key issues in cognition icub
4 Main Figures RobotCub is a 5 years projects Presently the consortium is composed of 16 Partners, 11 from Europe, 3 from Japan and 2 from the USA. Total Funding is 8.5 M and total effort is 1,651 person-months (138 person-years) Coordinator is the LIRA-Lab of the University of Genova: Giulio Sandini, Giorgio Metta and David Vernon
5 Current Consortium No Name Short Name Main Expertise in Project 1 University of Genova DIST (Giulio Sandini, David Vernon, Giorgio Metta) UGDIST Cognitive Robotics Vision and Manipulation 2 Scuola S. Anna Pisa (Paolo Dario) SSSUP Cognitive Robotics Manipulation Hardware 3 University of Zurich (Rolf Pfeifer) UNIZH Cognitive Robotics Audition and Touch 4 University of Uppsala (Claes von Hofsten) UNIUP Cognitive development of manipulation skills in humans 5 University of Ferrara (Luciano Fadiga) UNIFE Physiology of Manipulation control in humans 6 University of Hertfordshire (Kerstin Dautenhahn) UH Cognitive Behavior and Interaction 7 IST Lisbon (Jose Santos-Victor) IST Cognitive Robotics Eye-head coordination 8 University of Salford (Darwin Caldwell, John Gray) UNISAL Robotics Locomotion 9 Ecole Polytechnique Federal de Lausanne - (Aude Billard, Cognitive Behavior and Interaction (Billard - ASL) EPFL Auke Ijspeert) Locomotion (Ijspeert - LSL) 10 Telerobot S.r.l. (Francesco Becchi, David Corsini) TLR Mechanical design and manufacturing 11 European Brain Research Institute (Emilio BIzzi) EBRI Sensorimotor Coordination and motor cognition 12 MIT Computer Science and Artificial Intelligence Laboratory (Rod Brooks) 13 University of Minnesota - Dept. of Neurology (Juergen Konkzak) 14 Communications Research Laboratory, Japan (Hideki Kozima) 15 Universty of Tokyo - Department of Mechano-Informatics, (Yasuo Kuniyoshi) 16 ATR Computational Neuroscience Laboratories Kyoto (Gordon Cheng) CSAIL UNIMN CRL UNITK ATR Cognitive Humanoid Robotics Developmental Psychology Humanoid Robotics and Development Humanoid Robotics Neuroscience and Humanoid Robotics
6 An open system! Robot-Cub engineering goal is to build a humanoid platform whose design is open to the scientific community and can be duplicated and improved by the community of its users. Clearly stated in our Consortium Agreement We are looking for other projects willing to join RobotCub with the same open attitude.
7 Seeking International Collaboration 1. Joining effort with on-going project (and contribute to new proposals) 2. Directly support projects on Cognition based on icub platform
8 Joining effort with ongoing projects Contacts with NSF to establish links with projects with similar goals Concrete plan for joint-labs with Japanese Laboratories National Bilateral Agreements with international labs (e.g. UNIGE-MIT) Contributing to new proposals (e.g. CA eucognition) any further ideas for extending the community
9 Direct Support to projects 1. Establish a research and training facility for the, fabrication, use and maintenance of icub (start september 2006) 2. Launch of competitive calls for 1. Projects based on the use of icub in cognitive related research icub-kits 2 M of the RobotCub budget have been set aside for these activities (Call on March 2007)
10 Main Objectives (60 months) 1...a professionally documented, reproducible open platform shaped like a child-humanoid 2...the understanding through real-world implementation of exploratory and manipulationbased cognitive skills 3...the study and implementation of the initial period of human cognitive development in an embodied artificial system 4...building of an international scientific community
11 which rest on several props Unity of cognition: body and mind-ware co-design: Requirements: hands, dexterity, etc. Exploiting holistic design: Complex bodies requires global optimization Cost effectiveness: An open system can lead to a more efficient design/exploitation process

12 Manipulation as a link between action and perception Manipulation from grasping to gesture production with communicative intents From tool use to the creation of tool-ware Science-wise
13 General layout (60 months) Time 9/2004 3/2006 Activities Start of activities on specific aspects of cognition (several parallel activities), start the design of the CUB, start internationalization activities, start open source support First evaluation of cognitive investigation Mechanical design of icub / Prototypes 3/2007 Launch of competitive call for proposals 9/2007 New investigation starts using the open platform 8/2009 Integration of the mindware developed during the five years
14 Activity allocation Building the robotic platform Doing a lot of science Building a community
15 Activities ACT 1: Mind (Cognitive Neuroscience) ACT 2: Body (Cognitive Robotics) ACT 3: Open System (Dissemination) Learning and Development RC 1.1 Eye-Head-Hand Coordination RC 1.2 Bimanual Coordination RC 1.3 Interaction and Affordance RC 1.4 Interaction and Imitation RC 1.5 Interaction and Communication RC 2.1 Head-eye and Vision RC 2.2 Arm-Hand and Touch RC 2.3 Spine-Legs and Walk RC 2.4 Electronics and Control RC 2.5 Enabling Technologies RC 3.1 Mechanical Drawings RC 3.2 Electronic Drawings RC 3.3 Firmware and Software RC 3.4 CUB Manufacture RC 3.5 Internationalization RC 3.6 Maintenance and Update Community Building
16 Workpackage Breakdown Work Packages Responsible Partner Responsible Person WP-1 Management UGDIST Giulio Sandini WP2 Cognitive Development UNIUP Claes von Hofsten WP3 Sensorimotor Coordinat. UNIFE Luciano Fadiga WP4 Object's Affordance UGDIST Giorgio Metta WP5 Imitation Behaviors EPFL Aude Billard WP6 Gesture Communication UH Kerstin Dautenhahn WP7 Mechatronics TLR Francesco Becchi WP8 Infrastructure of Open System (CUB) UGDIST David Vernon WP9 Community Building and Assessment UGDIST Giulio Sandini

17 Child-like, how much? 243mm 369mm Approx 934mm 439mm Avg. 14Kg lb
18 Goals of the Open Day Present the project s scientific framework and the activities carried out so far Get the involvement of more scientists in the practical as well as scientific issues Present our next events
19 RobotCub Training Brain Development and Cognition in Human Infants, Acquafredda di Maratea, Italy, 1-6 October 2005 From Action to Cognition Chairperson: Professor Claes von Hofsten, Sweden Vice chair: Professor Janette Atkinson, UK Maratea Workshop is an official training activity of Robot-Cub (10K support for student s travel)
20

21 Villa Spinola Via Corridoni 5 Dinner LIRA-Lab Viale Causa 13
22 LUNCH BREAK See you at 14:30 COFFEE BREAK
Cognitive Systems Monographs
 Cognitive Systems Monographs Volume 11 Editors: Rüdiger Dillmann Yoshihiko Nakamura Stefan Schaal David Vernon David Vernon, Claes von Hofsten, and Luciano Fadiga A Roadmap for Cognitive Development in
Cognitive Systems Monographs Volume 11 Editors: Rüdiger Dillmann Yoshihiko Nakamura Stefan Schaal David Vernon David Vernon, Claes von Hofsten, and Luciano Fadiga A Roadmap for Cognitive Development in
José Santos-Victor. Curriculum Vitae
 José Santos-Victor Curriculum Vitae Associate Professor Instituto Superior Técnico Institute for Systems and Robotics Torre Norte, Av. Rovisco Pais, Lisboa PORTUGAL Phone/Fax: +351 21 8418 294/291 URL:
José Santos-Victor Curriculum Vitae Associate Professor Instituto Superior Técnico Institute for Systems and Robotics Torre Norte, Av. Rovisco Pais, Lisboa PORTUGAL Phone/Fax: +351 21 8418 294/291 URL:
Robot: icub This humanoid helps us study the brain
 ProfileArticle Robot: icub This humanoid helps us study the brain For the complete profile with media resources, visit: http://education.nationalgeographic.org/news/robot-icub/ Program By Robohub Tuesday,
ProfileArticle Robot: icub This humanoid helps us study the brain For the complete profile with media resources, visit: http://education.nationalgeographic.org/news/robot-icub/ Program By Robohub Tuesday,
PeriPersonal Space on the icub
 EXPANDING SENSORIMOTOR CAPABILITIES OF HUMANOID ROBOTS THROUGH MULTISENSORY INTEGRATION : RobotCub Consortium. License GPL v2.0. This content is excluded from our Creative Commons license. For more information,
EXPANDING SENSORIMOTOR CAPABILITIES OF HUMANOID ROBOTS THROUGH MULTISENSORY INTEGRATION : RobotCub Consortium. License GPL v2.0. This content is excluded from our Creative Commons license. For more information,
FP7 STREP. The. Consortium. Marine Robots and Dexterous Manipulation for Enabling Autonomous Underwater Multipurpose Intervention Missions
 FP7 STREP Marine Robots and Dexterous Manipulation for Enabling Autonomous Underwater Multipurpose Intervention Missions ID 248497 Strategic Objective: ICT 2009 4.2.1 Cognitive Systems, Interaction, Robotics
FP7 STREP Marine Robots and Dexterous Manipulation for Enabling Autonomous Underwater Multipurpose Intervention Missions ID 248497 Strategic Objective: ICT 2009 4.2.1 Cognitive Systems, Interaction, Robotics
FET FLAGSHIPS Preparatory Actions. Proposal "RoboCom: Robot Companions for Citizens"
 FET FLAGSHIPS Preparatory Actions Proposal "RoboCom: Robot Companions for Citizens" RoboCom Proposal Main Concept Abilities that robots haven t reached yet Lessons from Nature: simplifying principles for
FET FLAGSHIPS Preparatory Actions Proposal "RoboCom: Robot Companions for Citizens" RoboCom Proposal Main Concept Abilities that robots haven t reached yet Lessons from Nature: simplifying principles for
FP7 ICT Call 6: Cognitive Systems and Robotics
 FP7 ICT Call 6: Cognitive Systems and Robotics Information day Luxembourg, January 14, 2010 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media
FP7 ICT Call 6: Cognitive Systems and Robotics Information day Luxembourg, January 14, 2010 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media
A developmental approach to grasping
 A developmental approach to grasping Lorenzo Natale, Giorgio Metta and Giulio Sandini LIRA-Lab, DIST, University of Genoa Viale Causa 13, 16145, Genova Italy email: {nat, pasa, sandini}@liralab.it Abstract
A developmental approach to grasping Lorenzo Natale, Giorgio Metta and Giulio Sandini LIRA-Lab, DIST, University of Genoa Viale Causa 13, 16145, Genova Italy email: {nat, pasa, sandini}@liralab.it Abstract
Robotics for Children
 Vol. xx No. xx, pp.1 8, 200x 1 1 2 3 4 Robotics for Children New Directions in Child Education and Therapy Fumihide Tanaka 1,HidekiKozima 2, Shoji Itakura 3 and Kazuo Hiraki 4 Robotics intersects with
Vol. xx No. xx, pp.1 8, 200x 1 1 2 3 4 Robotics for Children New Directions in Child Education and Therapy Fumihide Tanaka 1,HidekiKozima 2, Shoji Itakura 3 and Kazuo Hiraki 4 Robotics intersects with
The icub humanoid robot: an open platform for research in embodied cognition (Special Session on EU-projects)
") The icub humanoid robot: an open platform for research in embodied cognition (Special Session on EU-projects) Giorgio Metta Giulio Sandini Italian Institute of Technology and University of Genoa Via Morego,
The icub humanoid robot: an open platform for research in embodied cognition (Special Session on EU-projects) Giorgio Metta Giulio Sandini Italian Institute of Technology and University of Genoa Via Morego,
SECOND YEAR PROJECT SUMMARY
 SECOND YEAR PROJECT SUMMARY Grant Agreement number: 215805 Project acronym: Project title: CHRIS Cooperative Human Robot Interaction Systems Period covered: from 01 March 2009 to 28 Feb 2010 Contact Details
SECOND YEAR PROJECT SUMMARY Grant Agreement number: 215805 Project acronym: Project title: CHRIS Cooperative Human Robot Interaction Systems Period covered: from 01 March 2009 to 28 Feb 2010 Contact Details
Deliverable Item 1.4 Periodic Progress Report N : 1
 MIRROR IST 2000-28159 Mirror Neurons based Object Recognition Deliverable Item 1.4 Periodic Progress Report N : 1 Covering period 1.9.2001-31.8.2002 Delivery Date: November 15 th, 2002 Classification:
MIRROR IST 2000-28159 Mirror Neurons based Object Recognition Deliverable Item 1.4 Periodic Progress Report N : 1 Covering period 1.9.2001-31.8.2002 Delivery Date: November 15 th, 2002 Classification:
Lower body design of the icub a humanbaby like crawling robot
 Lower body design of the icub a humanbaby like crawling robot Tsagarakis, NG, Sinclair, MD, Becchi, F, Metta, G, Sandini, G and Caldwell, DG http://dx.doi.org/10.1109/ichr.2006.2111 Title Authors Type
Lower body design of the icub a humanbaby like crawling robot Tsagarakis, NG, Sinclair, MD, Becchi, F, Metta, G, Sandini, G and Caldwell, DG http://dx.doi.org/10.1109/ichr.2006.2111 Title Authors Type
Manipulation. Manipulation. Better Vision through Manipulation. Giorgio Metta Paul Fitzpatrick. Humanoid Robotics Group.
 Manipulation Manipulation Better Vision through Manipulation Giorgio Metta Paul Fitzpatrick Humanoid Robotics Group MIT AI Lab Vision & Manipulation In robotics, vision is often used to guide manipulation
Manipulation Manipulation Better Vision through Manipulation Giorgio Metta Paul Fitzpatrick Humanoid Robotics Group MIT AI Lab Vision & Manipulation In robotics, vision is often used to guide manipulation
SISSA Scuola Internazionale Superiore di Studi Avanzati. Prof. Ing. Gianluigi Rozza SISSA Director sdelegate, Prof. Stefano Ruffo
 SISSA Scuola Internazionale Superiore di Studi Avanzati Prof. Ing. Gianluigi Rozza SISSA Director sdelegate, Prof. Stefano Ruffo 1 SISSA in brief Scientific center of excellence, with a special statute
SISSA Scuola Internazionale Superiore di Studi Avanzati Prof. Ing. Gianluigi Rozza SISSA Director sdelegate, Prof. Stefano Ruffo 1 SISSA in brief Scientific center of excellence, with a special statute
LASA I PRESS KIT lasa.epfl.ch I EPFL-STI-IMT-LASA Station 9 I CH 1015, Lausanne, Switzerland
 LASA I PRESS KIT 2016 LASA I OVERVIEW LASA (Learning Algorithms and Systems Laboratory) at EPFL, focuses on machine learning applied to robot control, humanrobot interaction and cognitive robotics at large.
LASA I PRESS KIT 2016 LASA I OVERVIEW LASA (Learning Algorithms and Systems Laboratory) at EPFL, focuses on machine learning applied to robot control, humanrobot interaction and cognitive robotics at large.
Robotica Umanoide. Lorenzo Natale icub Facility Istituto Italiano di Tecnologia. 30 Novembre 2015, Milano
 Robotica Umanoide Lorenzo Natale icub Facility Istituto Italiano di Tecnologia 30 Novembre 2015, Milano Italy Genova Genova Italian Institute of Technology Italy Genova Italian Institute of Technology
Robotica Umanoide Lorenzo Natale icub Facility Istituto Italiano di Tecnologia 30 Novembre 2015, Milano Italy Genova Genova Italian Institute of Technology Italy Genova Italian Institute of Technology
Learning haptic representation of objects
 Learning haptic representation of objects Lorenzo Natale, Giorgio Metta and Giulio Sandini LIRA-Lab, DIST University of Genoa viale Causa 13, 16145 Genova, Italy Email: nat, pasa, sandini @dist.unige.it
Learning haptic representation of objects Lorenzo Natale, Giorgio Metta and Giulio Sandini LIRA-Lab, DIST University of Genoa viale Causa 13, 16145 Genova, Italy Email: nat, pasa, sandini @dist.unige.it
2. Publishable summary
 2. Publishable summary CogLaboration (Successful real World Human-Robot Collaboration: from the cognition of human-human collaboration to fluent human-robot collaboration) is a specific targeted research
2. Publishable summary CogLaboration (Successful real World Human-Robot Collaboration: from the cognition of human-human collaboration to fluent human-robot collaboration) is a specific targeted research
Cognitive Systems and Robotics: opportunities in FP7
 Cognitive Systems and Robotics: opportunities in FP7 Austrian Robotics Summit July 3, 2009 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media European
Cognitive Systems and Robotics: opportunities in FP7 Austrian Robotics Summit July 3, 2009 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media European
The Use of Social Robot Ono in Robot Assisted Therapy
 The Use of Social Robot Ono in Robot Assisted Therapy Cesar Vandevelde 1, Jelle Saldien 1, Maria-Cristina Ciocci 1, Bram Vanderborght 2 1 Ghent University, Dept. of Industrial Systems and Product Design,
The Use of Social Robot Ono in Robot Assisted Therapy Cesar Vandevelde 1, Jelle Saldien 1, Maria-Cristina Ciocci 1, Bram Vanderborght 2 1 Ghent University, Dept. of Industrial Systems and Product Design,
A sensitive approach to grasping
 A sensitive approach to grasping Lorenzo Natale lorenzo@csail.mit.edu Massachusetts Institute Technology Computer Science and Artificial Intelligence Laboratory Cambridge, MA 02139 US Eduardo Torres-Jara
A sensitive approach to grasping Lorenzo Natale lorenzo@csail.mit.edu Massachusetts Institute Technology Computer Science and Artificial Intelligence Laboratory Cambridge, MA 02139 US Eduardo Torres-Jara
Deliverable D3.2.1: HC2 Video-clips
 EU FP7 FET Proactive - 258063 WorkPackage WP3: Society and Industry Deliverable D3.2.1: HC2 Video-clips Andrea Gaggioli, UCSC Giuseppe Riva, UCSC Cinzia Vigna, UCSC Stephen Dunne, STARLAB Release date:
EU FP7 FET Proactive - 258063 WorkPackage WP3: Society and Industry Deliverable D3.2.1: HC2 Video-clips Andrea Gaggioli, UCSC Giuseppe Riva, UCSC Cinzia Vigna, UCSC Stephen Dunne, STARLAB Release date:
Open Source in Mobile Robotics
 Presentation for the course Il software libero Politecnico di Torino - IIT@Polito June 13, 2011 Introduction Mobile Robotics Applications Where are the problems? What about the solutions? Mobile robotics
Presentation for the course Il software libero Politecnico di Torino - IIT@Polito June 13, 2011 Introduction Mobile Robotics Applications Where are the problems? What about the solutions? Mobile robotics
Breaking the Wall of Neurological Disorder. How Brain-Waves Can Steer Prosthetics.
 Miguel Nicolelis Professor and Co-Director of the Center for Neuroengineering, Department of Neurobiology, Duke University Medical Center, Duke University Medical Center, USA Breaking the Wall of Neurological
Miguel Nicolelis Professor and Co-Director of the Center for Neuroengineering, Department of Neurobiology, Duke University Medical Center, Duke University Medical Center, USA Breaking the Wall of Neurological
Birth of An Intelligent Humanoid Robot in Singapore
 Birth of An Intelligent Humanoid Robot in Singapore Ming Xie Nanyang Technological University Singapore 639798 Email: mmxie@ntu.edu.sg Abstract. Since 1996, we have embarked into the journey of developing
Birth of An Intelligent Humanoid Robot in Singapore Ming Xie Nanyang Technological University Singapore 639798 Email: mmxie@ntu.edu.sg Abstract. Since 1996, we have embarked into the journey of developing
VSP 2001/04/20 Prn:22/05/2007; 13:29 {RA} F:ar2489.tex; VTeX/ p. 1 (50-131)
") VSP 2001/04/20 Prn:22/05/2007; 13:29 {RA} F:ar2489.tex; VTeX/ p. 1 (50-131) Advanced Robotics, Vol., No., pp. 1 25 (2007) VSP and Robotics Society of Japan 2007. Also available online - www.brill.nl/ar
VSP 2001/04/20 Prn:22/05/2007; 13:29 {RA} F:ar2489.tex; VTeX/ p. 1 (50-131) Advanced Robotics, Vol., No., pp. 1 25 (2007) VSP and Robotics Society of Japan 2007. Also available online - www.brill.nl/ar
Assess how research on the construction of cognitive functions in robotic systems is undertaken in Japan, China, and Korea
 Sponsor: Assess how research on the construction of cognitive functions in robotic systems is undertaken in Japan, China, and Korea Understand the relationship between robotics and the human-centered sciences
Sponsor: Assess how research on the construction of cognitive functions in robotic systems is undertaken in Japan, China, and Korea Understand the relationship between robotics and the human-centered sciences
Preliminary Design of an Anthropomorphic Dexterous Hand for a 2-Years-Old Humanoid: towards Cognition
 Preliminary Design of an Anthropomorphic Dexterous Hand for a 2-Years-Old Humanoid: towards Cognition Giovanni Stellin, Giovanni Cappiello, Stefano Roccella, Maria Chiara Carrozza, Paolo Dario Giorgio
Preliminary Design of an Anthropomorphic Dexterous Hand for a 2-Years-Old Humanoid: towards Cognition Giovanni Stellin, Giovanni Cappiello, Stefano Roccella, Maria Chiara Carrozza, Paolo Dario Giorgio
International Federation of Robotics IFR. Vol.27 No G A DOI /j.issn
 100875 G40-057 A 1009 8097 2017 01 0013 08 DOI 10.3969/j.issn.1009-8097.2017.01.002 2016 10 21 2016 [1] [2] 20 2016 3 AlphaGo [3] 2030 International Federation of Robotics IFR [4] 13 [5] 20 60 Papert [6]
100875 G40-057 A 1009 8097 2017 01 0013 08 DOI 10.3969/j.issn.1009-8097.2017.01.002 2016 10 21 2016 [1] [2] 20 2016 3 AlphaGo [3] 2030 International Federation of Robotics IFR [4] 13 [5] 20 60 Papert [6]
Multisensory Based Manipulation Architecture
 Marine Robot and Dexterous Manipulatin for Enabling Multipurpose Intevention Missions WP7 Multisensory Based Manipulation Architecture GIRONA 2012 Y2 Review Meeting Pedro J Sanz IRS Lab http://www.irs.uji.es/
Marine Robot and Dexterous Manipulatin for Enabling Multipurpose Intevention Missions WP7 Multisensory Based Manipulation Architecture GIRONA 2012 Y2 Review Meeting Pedro J Sanz IRS Lab http://www.irs.uji.es/
Interaction rule learning with a human partner based on an imitation faculty with a simple visuo-motor mapping
 Robotics and Autonomous Systems 54 (2006) 414 418 www.elsevier.com/locate/robot Interaction rule learning with a human partner based on an imitation faculty with a simple visuo-motor mapping Masaki Ogino
Robotics and Autonomous Systems 54 (2006) 414 418 www.elsevier.com/locate/robot Interaction rule learning with a human partner based on an imitation faculty with a simple visuo-motor mapping Masaki Ogino
INSTITUTO de SISTEMAS E ROBÓTICA Institute for Systems and Robotics
 - Lisboa INSTITUTO de SISTEMAS E ROBÓTICA Mission and Goals ISR-Lisbon is an RD&I institution, affiliated to the Instituto Superior Técnico (IST), where multidisciplinary advanced research activities are
- Lisboa INSTITUTO de SISTEMAS E ROBÓTICA Mission and Goals ISR-Lisbon is an RD&I institution, affiliated to the Instituto Superior Técnico (IST), where multidisciplinary advanced research activities are
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Funding Opportunities in Metrology Related Research
 ASEAN-EU STI Days The Association of Southeast Asian Nations European Union Science, Technology and Innovation Days Funding Opportunities in Metrology Related Research Participation of SEA countries, and
ASEAN-EU STI Days The Association of Southeast Asian Nations European Union Science, Technology and Innovation Days Funding Opportunities in Metrology Related Research Participation of SEA countries, and
Humanoid Hands. CHENG Gang Dec Rollin Justin Robot.mp4
 Humanoid Hands CHENG Gang Dec. 2009 Rollin Justin Robot.mp4 Behind the Video Motivation of humanoid hand Serve the people whatever difficult Behind the Video Challenge to humanoid hand Dynamics How to
Humanoid Hands CHENG Gang Dec. 2009 Rollin Justin Robot.mp4 Behind the Video Motivation of humanoid hand Serve the people whatever difficult Behind the Video Challenge to humanoid hand Dynamics How to
ADVANCED CABLE-DRIVEN SENSING ARTIFICIAL HANDS FOR EXTRA VEHICULAR AND EXPLORATION ACTIVITIES
 In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 ADVANCED CABLE-DRIVEN SENSING ARTIFICIAL
In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 ADVANCED CABLE-DRIVEN SENSING ARTIFICIAL
FALL 2014, Issue No. 32 ROBOTICS AT OUR FINGERTIPS
 FALL 2014, Issue No. 32 ROBOTICS AT OUR FINGERTIPS FALL 2014 Issue No. 32 12 CYBERSECURITY SOLUTION NSF taps UCLA Engineering to take lead in encryption research. Cover Photo: Joanne Leung 6MAN AND MACHINE
FALL 2014, Issue No. 32 ROBOTICS AT OUR FINGERTIPS FALL 2014 Issue No. 32 12 CYBERSECURITY SOLUTION NSF taps UCLA Engineering to take lead in encryption research. Cover Photo: Joanne Leung 6MAN AND MACHINE
Joint Declaration of Intent. of the Ministry of Economy, Trade and Industry of Japan, the Ministry of Internal Affairs and Communications of Japan
 Joint Declaration of Intent of the Ministry of Economy, Trade and Industry of Japan, the Ministry of Internal Affairs and Communications of Japan and the Federal Ministry for Economic Affairs and Energy
Joint Declaration of Intent of the Ministry of Economy, Trade and Industry of Japan, the Ministry of Internal Affairs and Communications of Japan and the Federal Ministry for Economic Affairs and Energy
Next Generation of Collaborative Robots
 Next Generation of Collaborative Robots French-Japanese Conference 26 February 2014 Embassy of France in Japan, Tokyo Vision based Control of multi-arms systems Authors P., A. Abou Moughlbay, P. Long,
Next Generation of Collaborative Robots French-Japanese Conference 26 February 2014 Embassy of France in Japan, Tokyo Vision based Control of multi-arms systems Authors P., A. Abou Moughlbay, P. Long,
Plenary Talks. Simplifying principles for perception, action, locomotion and navigation. A common problem for brains and robots
 Plenary Talks Plenary Talk I, Wednesday, 11 April 2007 08:20-9:10 (WePP) Aula Magna (Angelicum University) Chair: Paolo Dario, Scuola Superiore S. Anna, Pisa, Italy Simplifying principles for perception,
Plenary Talks Plenary Talk I, Wednesday, 11 April 2007 08:20-9:10 (WePP) Aula Magna (Angelicum University) Chair: Paolo Dario, Scuola Superiore S. Anna, Pisa, Italy Simplifying principles for perception,
How the Body Shapes the Way We Think
 How the Body Shapes the Way We Think A New View of Intelligence Rolf Pfeifer and Josh Bongard with a contribution by Simon Grand Foreword by Rodney Brooks Illustrations by Shun Iwasawa A Bradford Book
How the Body Shapes the Way We Think A New View of Intelligence Rolf Pfeifer and Josh Bongard with a contribution by Simon Grand Foreword by Rodney Brooks Illustrations by Shun Iwasawa A Bradford Book
Interactive Robot Learning of Gestures, Language and Affordances
 GLU 217 International Workshop on Grounding Language Understanding 25 August 217, Stockholm, Sweden Interactive Robot Learning of Gestures, Language and Affordances Giovanni Saponaro 1, Lorenzo Jamone
GLU 217 International Workshop on Grounding Language Understanding 25 August 217, Stockholm, Sweden Interactive Robot Learning of Gestures, Language and Affordances Giovanni Saponaro 1, Lorenzo Jamone
Humanoids. Lecture Outline. RSS 2010 Lecture # 19 Una-May O Reilly. Definition and motivation. Locomotion. Why humanoids? What are humanoids?
 Humanoids RSS 2010 Lecture # 19 Una-May O Reilly Lecture Outline Definition and motivation Why humanoids? What are humanoids? Examples Locomotion RSS 2010 Humanoids Lecture 1 1 Why humanoids? Capek, Paris
Humanoids RSS 2010 Lecture # 19 Una-May O Reilly Lecture Outline Definition and motivation Why humanoids? What are humanoids? Examples Locomotion RSS 2010 Humanoids Lecture 1 1 Why humanoids? Capek, Paris
Rapid Development System for Humanoid Vision-based Behaviors with Real-Virtual Common Interface
 Rapid Development System for Humanoid Vision-based Behaviors with Real-Virtual Common Interface Kei Okada 1, Yasuyuki Kino 1, Fumio Kanehiro 2, Yasuo Kuniyoshi 1, Masayuki Inaba 1, Hirochika Inoue 1 1
Rapid Development System for Humanoid Vision-based Behaviors with Real-Virtual Common Interface Kei Okada 1, Yasuyuki Kino 1, Fumio Kanehiro 2, Yasuo Kuniyoshi 1, Masayuki Inaba 1, Hirochika Inoue 1 1
Performance Assessment of a 3 DOF Differential Based. Waist joint for the icub Baby Humanoid Robot
 Performance Assessment of a 3 DOF Differential Based Waist joint for the icub Baby Humanoid Robot W. M. Hinojosa, N. G. Tsagarakis, Giorgio Metta, Francesco Becchi, Julio Sandini and Darwin. G. Caldwell
Performance Assessment of a 3 DOF Differential Based Waist joint for the icub Baby Humanoid Robot W. M. Hinojosa, N. G. Tsagarakis, Giorgio Metta, Francesco Becchi, Julio Sandini and Darwin. G. Caldwell
Canada s National Design Network. Community Research Innovation Opportunity
 Canada s National Design Network Community Research Innovation Opportunity Over the past five years, more than 7000 researchers in the National Design Network have benefited from industrial tools, technologies,
Canada s National Design Network Community Research Innovation Opportunity Over the past five years, more than 7000 researchers in the National Design Network have benefited from industrial tools, technologies,
Tapping into Touch. Eduardo Torres-Jara Lorenzo Natale Paul Fitzpatrick
 Berthouze, L., Kaplan, F., Kozima, H., Yano, H., Konczak, J., Metta, G., Nadel, J., Sandini, G., Stojanov, G. and Balkenius, C. (Eds.) Proceedings of the Fifth International Workshop on Epigenetic Robotics:
Berthouze, L., Kaplan, F., Kozima, H., Yano, H., Konczak, J., Metta, G., Nadel, J., Sandini, G., Stojanov, G. and Balkenius, C. (Eds.) Proceedings of the Fifth International Workshop on Epigenetic Robotics:
IP and Technology Management for Universities
 IP and Technology Management for Universities Yumiko Hamano Senior Program Officer WIPO University Initiative Innovation and Technology Transfer Section, Patent Division, WIPO Outline! University and IP!
IP and Technology Management for Universities Yumiko Hamano Senior Program Officer WIPO University Initiative Innovation and Technology Transfer Section, Patent Division, WIPO Outline! University and IP!
School of Informatics Director of Commercialisation and Industry Engagement
 School of Informatics Director of Commercialisation and Industry Engagement January 2017 Contents 1. Our Vision 2. The School of Informatics 3. The University of Edinburgh - Mission Statement 4. The Role
School of Informatics Director of Commercialisation and Industry Engagement January 2017 Contents 1. Our Vision 2. The School of Informatics 3. The University of Edinburgh - Mission Statement 4. The Role
Cognition & Robotics. EUCog - European Network for the Advancement of Artificial Cognitive Systems, Interaction and Robotics
 Cognition & Robotics Recent debates in Cognitive Robotics bring about ways to seek a definitional connection between cognition and robotics, ponder upon the questions: EUCog - European Network for the
Cognition & Robotics Recent debates in Cognitive Robotics bring about ways to seek a definitional connection between cognition and robotics, ponder upon the questions: EUCog - European Network for the
Team Description 2006 for Team RO-PE A
 Team Description 2006 for Team RO-PE A Chew Chee-Meng, Samuel Mui, Lim Tongli, Ma Chongyou, and Estella Ngan National University of Singapore, 119260 Singapore {mpeccm, g0500307, u0204894, u0406389, u0406316}@nus.edu.sg
Team Description 2006 for Team RO-PE A Chew Chee-Meng, Samuel Mui, Lim Tongli, Ma Chongyou, and Estella Ngan National University of Singapore, 119260 Singapore {mpeccm, g0500307, u0204894, u0406389, u0406316}@nus.edu.sg
ECHORD and ECHORD++ European Clearing House for Open Robotics Development
 ECHORD and ECHORD++ European Clearing House for Open Robotics Development Paolo Dario* and Alois Knoll *The BioRobotics Institute, Scuola Superiore Sant Anna (Italy) Technische Universität München (Germany)
ECHORD and ECHORD++ European Clearing House for Open Robotics Development Paolo Dario* and Alois Knoll *The BioRobotics Institute, Scuola Superiore Sant Anna (Italy) Technische Universität München (Germany)
5a. Reactive Agents. COMP3411: Artificial Intelligence. Outline. History of Reactive Agents. Reactive Agents. History of Reactive Agents
 COMP3411 15s1 Reactive Agents 1 COMP3411: Artificial Intelligence 5a. Reactive Agents Outline History of Reactive Agents Chemotaxis Behavior-Based Robotics COMP3411 15s1 Reactive Agents 2 Reactive Agents
COMP3411 15s1 Reactive Agents 1 COMP3411: Artificial Intelligence 5a. Reactive Agents Outline History of Reactive Agents Chemotaxis Behavior-Based Robotics COMP3411 15s1 Reactive Agents 2 Reactive Agents
Natural Interaction with Social Robots
 Workshop: Natural Interaction with Social Robots Part of the Topig Group with the same name. http://homepages.stca.herts.ac.uk/~comqkd/tg-naturalinteractionwithsocialrobots.html organized by Kerstin Dautenhahn,
Workshop: Natural Interaction with Social Robots Part of the Topig Group with the same name. http://homepages.stca.herts.ac.uk/~comqkd/tg-naturalinteractionwithsocialrobots.html organized by Kerstin Dautenhahn,
from icub to R1 building your personal humanoid
 from icub to R1 building your personal humanoid Giorgio Metta Vice Scientific Director Istituto Italiano di Tecnologia Via Morego, 30-16163, Genoa, ITALY giorgio.metta@iit.it ageing in US declining
from icub to R1 building your personal humanoid Giorgio Metta Vice Scientific Director Istituto Italiano di Tecnologia Via Morego, 30-16163, Genoa, ITALY giorgio.metta@iit.it ageing in US declining
Prof. Subramanian Ramamoorthy. The University of Edinburgh, Reader at the School of Informatics
 Prof. Subramanian Ramamoorthy The University of Edinburgh, Reader at the School of Informatics with Baxter there is a good simulator, a physical robot and easy to access public libraries means it s relatively
Prof. Subramanian Ramamoorthy The University of Edinburgh, Reader at the School of Informatics with Baxter there is a good simulator, a physical robot and easy to access public libraries means it s relatively
Interacting with the real world design principles for intelligent systems
 Interacting with the real world design principles for intelligent systems Rolf Pfeifer and Gabriel Gomez Artificial Intelligence Laboratory Department of Informatics at the University of Zurich Andreasstrasse
Interacting with the real world design principles for intelligent systems Rolf Pfeifer and Gabriel Gomez Artificial Intelligence Laboratory Department of Informatics at the University of Zurich Andreasstrasse
By Marek Perkowski ECE Seminar, Friday January 26, 2001
 By Marek Perkowski ECE Seminar, Friday January 26, 2001 Why people build Humanoid Robots? Challenge - it is difficult Money - Hollywood, Brooks Fame -?? Everybody? To build future gods - De Garis Forthcoming
By Marek Perkowski ECE Seminar, Friday January 26, 2001 Why people build Humanoid Robots? Challenge - it is difficult Money - Hollywood, Brooks Fame -?? Everybody? To build future gods - De Garis Forthcoming
Performance evaluation and benchmarking in EU-funded activities. ICRA May 2011
 Performance evaluation and benchmarking in EU-funded activities ICRA 2011 13 May 2011 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media European
Performance evaluation and benchmarking in EU-funded activities ICRA 2011 13 May 2011 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media European
Global Alzheimer s Association Interactive Network. Imagine GAAIN
 Global Alzheimer s Association Interactive Network Imagine the possibilities if any scientist anywhere in the world could easily explore vast interlinked repositories of data on thousands of subjects with
Global Alzheimer s Association Interactive Network Imagine the possibilities if any scientist anywhere in the world could easily explore vast interlinked repositories of data on thousands of subjects with
SIGVerse - A Simulation Platform for Human-Robot Interaction Jeffrey Too Chuan TAN and Tetsunari INAMURA National Institute of Informatics, Japan The
 SIGVerse - A Simulation Platform for Human-Robot Interaction Jeffrey Too Chuan TAN and Tetsunari INAMURA National Institute of Informatics, Japan The 29 th Annual Conference of The Robotics Society of
SIGVerse - A Simulation Platform for Human-Robot Interaction Jeffrey Too Chuan TAN and Tetsunari INAMURA National Institute of Informatics, Japan The 29 th Annual Conference of The Robotics Society of
ICT4 Manuf. Competence Center
 ICT4 Manuf. Competence Center Prof. Yacine Ouzrout University Lumiere Lyon 2 ICT 4 Manufacturing Competence Center AI and CPS for Manufacturing Robot software testing Development of software technologies
ICT4 Manuf. Competence Center Prof. Yacine Ouzrout University Lumiere Lyon 2 ICT 4 Manufacturing Competence Center AI and CPS for Manufacturing Robot software testing Development of software technologies
Affordance based Human Motion Synthesizing System
 Affordance based Human Motion Synthesizing System H. Ishii, N. Ichiguchi, D. Komaki, H. Shimoda and H. Yoshikawa Graduate School of Energy Science Kyoto University Uji-shi, Kyoto, 611-0011, Japan Abstract
Affordance based Human Motion Synthesizing System H. Ishii, N. Ichiguchi, D. Komaki, H. Shimoda and H. Yoshikawa Graduate School of Energy Science Kyoto University Uji-shi, Kyoto, 611-0011, Japan Abstract
from icub to R1 a project of robotics for AI
 from icub to R1 a project of robotics for AI Giorgio Metta Vice Scientific Director Istituto Italiano di Tecnologia Via Morego, 30 16163, Genoa, ITALY giorgio.metta@iit.it IIT s scientific plan bioinspired
from icub to R1 a project of robotics for AI Giorgio Metta Vice Scientific Director Istituto Italiano di Tecnologia Via Morego, 30 16163, Genoa, ITALY giorgio.metta@iit.it IIT s scientific plan bioinspired
BIFOCALPS Project. D.T1.1.2: Workshop on FoF adoption in manufacturing value chain
 BIFOCALPS Project Boosting Innovation in Factory Of the future value Chain in the Alps Project Number: 510 D.T1.1.2: Workshop on FoF adoption in manufacturing value chain Deliverable code: WP T1 Responsible
BIFOCALPS Project Boosting Innovation in Factory Of the future value Chain in the Alps Project Number: 510 D.T1.1.2: Workshop on FoF adoption in manufacturing value chain Deliverable code: WP T1 Responsible
Robotics: from FP7 to Horizon Libor Král, Head of Unit Unit A2 - Robotics DG Communication Networks, Content and Technology European Commission
 Robotics: from FP7 to Horizon 2020 Libor Král, Head of Unit Unit A2 - Robotics DG Communication Networks, Content and Technology European Commission Robotics in Regions 30 October 2013 Key issues research
Robotics: from FP7 to Horizon 2020 Libor Král, Head of Unit Unit A2 - Robotics DG Communication Networks, Content and Technology European Commission Robotics in Regions 30 October 2013 Key issues research
SQUIRREL Summer School 2014 Freiburg, July. Gian-Diego Tipaldi, Michael Zillich
 SQUIRREL Summer School 2014 Freiburg, 21. 25. July Gian-Diego Tipaldi, Michael Zillich 1 Overview Welcome to the 2014 SQUIRREL Summer School in Freiburg! The following pages will provide you with the basic
SQUIRREL Summer School 2014 Freiburg, 21. 25. July Gian-Diego Tipaldi, Michael Zillich 1 Overview Welcome to the 2014 SQUIRREL Summer School in Freiburg! The following pages will provide you with the basic
SPQR RoboCup 2016 Standard Platform League Qualification Report
 SPQR RoboCup 2016 Standard Platform League Qualification Report V. Suriani, F. Riccio, L. Iocchi, D. Nardi Dipartimento di Ingegneria Informatica, Automatica e Gestionale Antonio Ruberti Sapienza Università
SPQR RoboCup 2016 Standard Platform League Qualification Report V. Suriani, F. Riccio, L. Iocchi, D. Nardi Dipartimento di Ingegneria Informatica, Automatica e Gestionale Antonio Ruberti Sapienza Università
This document is published in: Robotics and Computer-Integrated Manufacturing (2010), 26(2), DOI: /j.rcim
, 26(2), DOI: /j.rcim") This document is published in: Robotics and Computer-Integrated Manufacturing (2010), 26(2), 119 129. DOI: 10.1016/j.rcim.2009.08.001 2009 Elsevier Ltd. This work has been supported by the CAM Project
This document is published in: Robotics and Computer-Integrated Manufacturing (2010), 26(2), 119 129. DOI: 10.1016/j.rcim.2009.08.001 2009 Elsevier Ltd. This work has been supported by the CAM Project
FET Flagships in Horizon 2020
 HORIZON 2020 - Future & Emerging Technologies (FET) Paris, 21 st December 2017 FET Flagships in Horizon 2020 Aymard de Touzalin Deputy Head of Unit, Flagships DG Connect, European Commission 1 Horizon
HORIZON 2020 - Future & Emerging Technologies (FET) Paris, 21 st December 2017 FET Flagships in Horizon 2020 Aymard de Touzalin Deputy Head of Unit, Flagships DG Connect, European Commission 1 Horizon
Arshad Mansoor, Sr. Vice President, Research & Development INNOVATION SCOUTS: EXPANDING EPRI S TECHNOLOGY INNOVATION NETWORK
 RAC Briefing 2011-1 TO: FROM: SUBJECT: Research Advisory Committee Arshad Mansoor, Sr. Vice President, Research & Development INNOVATION SCOUTS: EXPANDING EPRI S TECHNOLOGY INNOVATION NETWORK Research
RAC Briefing 2011-1 TO: FROM: SUBJECT: Research Advisory Committee Arshad Mansoor, Sr. Vice President, Research & Development INNOVATION SCOUTS: EXPANDING EPRI S TECHNOLOGY INNOVATION NETWORK Research
WG/STAIR. Knut Blind, STAIR Chairman
 WG/STAIR Title: Source: The Operationalisation of the Integrated Approach: Submission of STAIR to the Consultation of the Green Paper From Challenges to Opportunities: Towards a Common Strategic Framework
WG/STAIR Title: Source: The Operationalisation of the Integrated Approach: Submission of STAIR to the Consultation of the Green Paper From Challenges to Opportunities: Towards a Common Strategic Framework
Dario della Sala ENEA Research Centre «Casaccia», Rome (Italy)
") Lessons learned about SMEs in OLAE Dario della Sala ENEA Research Centre «Casaccia», Rome (Italy) Experience gained in Italy Phase 1 Concept dissemination About 10 slides (in italian) were arranged and
Lessons learned about SMEs in OLAE Dario della Sala ENEA Research Centre «Casaccia», Rome (Italy) Experience gained in Italy Phase 1 Concept dissemination About 10 slides (in italian) were arranged and
Android (Child android)
") Social and ethical issue Why have I developed the android? Hiroshi ISHIGURO Department of Adaptive Machine Systems, Osaka University ATR Intelligent Robotics and Communications Laboratories JST ERATO Asada
Social and ethical issue Why have I developed the android? Hiroshi ISHIGURO Department of Adaptive Machine Systems, Osaka University ATR Intelligent Robotics and Communications Laboratories JST ERATO Asada
BLUE BRAIN - The name of the world s first virtual brain. That means a machine that can function as human brain.
 CONTENTS 1~ INTRODUCTION 2~ WHAT IS BLUE BRAIN 3~ WHAT IS VIRTUAL BRAIN 4~ FUNCTION OF NATURAL BRAIN 5~ BRAIN SIMULATION 6~ CURRENT RESEARCH WORK 7~ ADVANTAGES 8~ DISADVANTAGE 9~ HARDWARE AND SOFTWARE
CONTENTS 1~ INTRODUCTION 2~ WHAT IS BLUE BRAIN 3~ WHAT IS VIRTUAL BRAIN 4~ FUNCTION OF NATURAL BRAIN 5~ BRAIN SIMULATION 6~ CURRENT RESEARCH WORK 7~ ADVANTAGES 8~ DISADVANTAGE 9~ HARDWARE AND SOFTWARE
Policy Forum. Science 26 January 2001: Vol no. 5504, pp DOI: /science Prev Table of Contents Next
 Science 26 January 2001: Vol. 291. no. 5504, pp. 599-600 DOI: 10.1126/science.291.5504.599 Prev Table of Contents Next Policy Forum ARTIFICIAL INTELLIGENCE: Autonomous Mental Development by Robots and
Science 26 January 2001: Vol. 291. no. 5504, pp. 599-600 DOI: 10.1126/science.291.5504.599 Prev Table of Contents Next Policy Forum ARTIFICIAL INTELLIGENCE: Autonomous Mental Development by Robots and
- Basics of informatics - Computer network - Software engineering - Intelligent media processing - Human interface. Professor. Professor.
 - Basics of informatics - Computer network - Software engineering - Intelligent media processing - Human interface Computer-Aided Engineering Research of power/signal integrity analysis and EMC design
- Basics of informatics - Computer network - Software engineering - Intelligent media processing - Human interface Computer-Aided Engineering Research of power/signal integrity analysis and EMC design
Robotics in the healthcare domain / DIH status and future
 Robotics in the healthcare domain / DIH status and future Anne BAJART Head of Sector Robotics Industrial Development and Impact Irene SARDELLITTI Program Officer Robotics and Artificial Intelligence Directorate-General
Robotics in the healthcare domain / DIH status and future Anne BAJART Head of Sector Robotics Industrial Development and Impact Irene SARDELLITTI Program Officer Robotics and Artificial Intelligence Directorate-General
Institute of Computer Technology
 1 Faculty of Informatics Faculty of Mechanical and Industrial Engineering Faculty of Electrical Engineering and Information Technology 8 Institute of Fundamentals and Theory of Electrical Engineering Institute
1 Faculty of Informatics Faculty of Mechanical and Industrial Engineering Faculty of Electrical Engineering and Information Technology 8 Institute of Fundamentals and Theory of Electrical Engineering Institute
2015 MIT EuropE ConfErEnCE
 2015 MIT EuropE ConfErEnCE MINDS MACHINES MANAGEMENT 25-26 March 2015 Vienna, Austria Wirtschaftskammer Österreich Your HoSTS AuSTrIAn federal EConoMIC CHAMbEr (wirtschaftskammer ÖSTErrEICH) The Austrian
2015 MIT EuropE ConfErEnCE MINDS MACHINES MANAGEMENT 25-26 March 2015 Vienna, Austria Wirtschaftskammer Österreich Your HoSTS AuSTrIAn federal EConoMIC CHAMbEr (wirtschaftskammer ÖSTErrEICH) The Austrian
Digital Cultural Heritage Roadmap for Preservation
 Digital Cultural Heritage Roadmap for Preservation Background The project DCH-RP Digital Cultural Heritage Roadmap for Preservation is a coordination action supported by the European Commission under the
Digital Cultural Heritage Roadmap for Preservation Background The project DCH-RP Digital Cultural Heritage Roadmap for Preservation is a coordination action supported by the European Commission under the
GamECAR JULY ULY Meetings. 5 Toward the future. 5 Consortium. E Stay updated
 NEWSLETTER 1 ULY 2017 JULY The project engine has started and there is a long way to go, but we aim at consuming as less gas as possible! It will be a game, but a serious one. Playing it for real, while
NEWSLETTER 1 ULY 2017 JULY The project engine has started and there is a long way to go, but we aim at consuming as less gas as possible! It will be a game, but a serious one. Playing it for real, while
Annex I - Description of Work
 SEVENTH FRAMEWORK PROGRAMME Challenge 3: Components, systems, engineering ICT-2007.3.3 Embedded systems design Grant agreement for: Network of Excellence (NoE) Annex I - Description of Work Project acronym:
SEVENTH FRAMEWORK PROGRAMME Challenge 3: Components, systems, engineering ICT-2007.3.3 Embedded systems design Grant agreement for: Network of Excellence (NoE) Annex I - Description of Work Project acronym:
On-demand printable robots
 On-demand printable robots Ankur Mehta Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology 3 Computational problem? 4 Physical problem? There s a robot for that.
On-demand printable robots Ankur Mehta Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology 3 Computational problem? 4 Physical problem? There s a robot for that.
Lower Body Realization of the Baby Humanoid - icub
 Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems San Diego, CA, USA, Oct 29 - Nov 2, 2007 ThC5.2 Lower Body Realization of the Baby Humanoid - icub N.G.Tsagarakis
Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems San Diego, CA, USA, Oct 29 - Nov 2, 2007 ThC5.2 Lower Body Realization of the Baby Humanoid - icub N.G.Tsagarakis
A SURVEY OF SOCIALLY INTERACTIVE ROBOTS
 A SURVEY OF SOCIALLY INTERACTIVE ROBOTS Terrence Fong, Illah Nourbakhsh, Kerstin Dautenhahn Presented By: Mehwish Alam INTRODUCTION History of Social Robots Social Robots Socially Interactive Robots Why
A SURVEY OF SOCIALLY INTERACTIVE ROBOTS Terrence Fong, Illah Nourbakhsh, Kerstin Dautenhahn Presented By: Mehwish Alam INTRODUCTION History of Social Robots Social Robots Socially Interactive Robots Why
Design of an Anthropomorphic Dexterous Hand for a 2-Years-Old Humanoid: Ongoing Work
 Design of an Anthropomorphic Dexterous Hand for a 2-Years-Old Humanoid: Ongoing Work Giovanni Stellin 1, Christian Cipriani 1,2, Franco Zaccone 1, M. C. Carrozza 1, Cecilia Laschi 1 and Paolo Dario 1,3
Design of an Anthropomorphic Dexterous Hand for a 2-Years-Old Humanoid: Ongoing Work Giovanni Stellin 1, Christian Cipriani 1,2, Franco Zaccone 1, M. C. Carrozza 1, Cecilia Laschi 1 and Paolo Dario 1,3
Development of an Interactive Humanoid Robot Robovie - An interdisciplinary research approach between cognitive science and robotics -
 Development of an Interactive Humanoid Robot Robovie - An interdisciplinary research approach between cognitive science and robotics - Hiroshi Ishiguro 1,2, Tetsuo Ono 1, Michita Imai 1, Takayuki Kanda
Development of an Interactive Humanoid Robot Robovie - An interdisciplinary research approach between cognitive science and robotics - Hiroshi Ishiguro 1,2, Tetsuo Ono 1, Michita Imai 1, Takayuki Kanda
Vertebrate- or snake-like soft robot based on tensegrity principle. Présentation GT5, vendredi 28 novembre 2014
 Vertebrate- or snake-like soft robot based on tensegrity principle Présentation GT5, vendredi 28 novembre 2014 Alex Pitti, phd Maître de Conférence, chaire d'excellence UCP-CNRS Laboratoire ETIS CNRS,
Vertebrate- or snake-like soft robot based on tensegrity principle Présentation GT5, vendredi 28 novembre 2014 Alex Pitti, phd Maître de Conférence, chaire d'excellence UCP-CNRS Laboratoire ETIS CNRS,
HRP-2W: A Humanoid Platform for Research on Support Behavior in Daily life Environments
 Book Title Book Editors IOS Press, 2003 1 HRP-2W: A Humanoid Platform for Research on Support Behavior in Daily life Environments Tetsunari Inamura a,1, Masayuki Inaba a and Hirochika Inoue a a Dept. of
Book Title Book Editors IOS Press, 2003 1 HRP-2W: A Humanoid Platform for Research on Support Behavior in Daily life Environments Tetsunari Inamura a,1, Masayuki Inaba a and Hirochika Inoue a a Dept. of
World Technology Evaluation Center International Study of Robotics Research. Robotic Vehicles. Robotic vehicles study group:
 World Technology Evaluation Center International Study of Robotics Research Robotic Vehicles Robotic vehicles study group: Arthur Sanderson, Rensselaer Polytechnic Institute (Presenter) George Bekey, University
World Technology Evaluation Center International Study of Robotics Research Robotic Vehicles Robotic vehicles study group: Arthur Sanderson, Rensselaer Polytechnic Institute (Presenter) George Bekey, University
Exploration Partnership Strategy. Marguerite Broadwell Exploration Systems Mission Directorate
 Exploration Partnership Strategy Marguerite Broadwell Exploration Systems Mission Directorate October 1, 2007 Vision for Space Exploration Complete the International Space Station Safely fly the Space
Exploration Partnership Strategy Marguerite Broadwell Exploration Systems Mission Directorate October 1, 2007 Vision for Space Exploration Complete the International Space Station Safely fly the Space
Low cost robotic arm and cobotic
 Low cost robotic arm and cobotic Autofina and University of Le Havre Autofina Session Agenda Introduction to Autofina Paresh Parekh, CEO Introduction to GREAH, University of Le Havre Jean-Francois Brethe
Low cost robotic arm and cobotic Autofina and University of Le Havre Autofina Session Agenda Introduction to Autofina Paresh Parekh, CEO Introduction to GREAH, University of Le Havre Jean-Francois Brethe
DELIVERABLE SEPE Exploitation Plan
 2016 DELIVERABLE 6.1.3 SEPE Exploitation Plan Table of Contents Executive Summary... 3 1. Description of the Project... 4 2. Aims & Objectives of the Deliverable... 5 3. SEPE s role in Exploitation...
2016 DELIVERABLE 6.1.3 SEPE Exploitation Plan Table of Contents Executive Summary... 3 1. Description of the Project... 4 2. Aims & Objectives of the Deliverable... 5 3. SEPE s role in Exploitation...
The MARCS Institute for Brain, Behaviour and Development
 The MARCS Institute for Brain, Behaviour and Development The MARCS Institute for Brain, Behaviour and Development At the MARCS Institute for Brain, Behaviour and Development, we study the scientific bases
The MARCS Institute for Brain, Behaviour and Development The MARCS Institute for Brain, Behaviour and Development At the MARCS Institute for Brain, Behaviour and Development, we study the scientific bases
Distributed Robotics: Building an environment for digital cooperation. Artificial Intelligence series
 Distributed Robotics: Building an environment for digital cooperation Artificial Intelligence series Distributed Robotics March 2018 02 From programmable machines to intelligent agents Robots, from the
Distributed Robotics: Building an environment for digital cooperation Artificial Intelligence series Distributed Robotics March 2018 02 From programmable machines to intelligent agents Robots, from the
Korea Humanoid Robot Projects
 Korea Humanoid Robot Projects Jun Ho Oh HUBO Lab., KAIST KOREA Humanoid Projects(~2001) A few humanoid robot projects were existed. Most researches were on dynamic and kinematic simulations for walking
Korea Humanoid Robot Projects Jun Ho Oh HUBO Lab., KAIST KOREA Humanoid Projects(~2001) A few humanoid robot projects were existed. Most researches were on dynamic and kinematic simulations for walking
Information Society Technologies in the 6th Framework Programme. Tom Bo Clausen Project Officer European Commission, IST programme Embedded Systems
 Information Society Technologies in the 6th Framework Programme Tom Bo Clausen Project Officer European Commission, IST programme Embedded Systems Outline of presentation What is a Framework Programme?
Information Society Technologies in the 6th Framework Programme Tom Bo Clausen Project Officer European Commission, IST programme Embedded Systems Outline of presentation What is a Framework Programme?
EarthCube Conceptual Design: Enterprise Architecture for Transformative Research and Collaboration Across the Geosciences
 EarthCube Conceptual Design: Enterprise Architecture for Transformative Research and Collaboration Across the Geosciences ILYA ZASLAVSKY, DAVID VALENTINE, AMARNATH GUPTA San Diego Supercomputer Center/UCSD
EarthCube Conceptual Design: Enterprise Architecture for Transformative Research and Collaboration Across the Geosciences ILYA ZASLAVSKY, DAVID VALENTINE, AMARNATH GUPTA San Diego Supercomputer Center/UCSD