Low cost robotic arm and cobotic
|
|
|
- Dana Conley
- 5 years ago
- Views:
Transcription





1 Low cost robotic arm and cobotic Autofina and University of Le Havre Autofina
2 Session Agenda Introduction to Autofina Paresh Parekh, CEO Introduction to GREAH, University of Le Havre Jean-Francois Brethe State of the Art Jean-Francois Brethe COROT Challenges Autofina and GREAH Challenge Groups Team working on the challenges 2
 Expertise in mechanical design and")
3 Autofina Designing and building the World s most affordable industrial robot Founded in 2013 Based in Cambridge, UK Design licensed for manufacture with TAL Manufacturing Solutions Ltd (a TATA Enterprise) Expertise in mechanical design and production

4 Our Role in the Project Providing a robotic arm platform for the project Developing and integrating the robotic arm onto the AGV Interfacing with COROT modules hardware / software Exploring commercial exploitation of project outputs
5 The Robot 5 or 6 Axis Purchase price 7-12,000 Payload 2, 5 and 10kg Reach 800mm, 1000mm and 1200mm Designed in the UK, manufactured in India Format: Vertically articulated multi axis (5/6) industrial robot arm with incremental encoders and brakes on each axes Reach: 800mm in any direction Payload Nominal: 12Kg Payload: Max 10Kg at full reach Joint Motion Ranges: Waist: 360 Shoulder: 290 Elbow: 300 Hand: 360 Unlimited rotations Wrist: 360 Unlimited rotations Repeatability: up to 0.05mm Maximum speeds Shoulder: 200 per sec Elbow: 400 per sec Waist: 400 per sec Hand: 200 per sec Wrist: 200 per sec Max torque for hand pitch or roll: 15 Nm Weight: Robot: 85kg Controller: 20kg Power: 110/220v AC Single Phase Temperature range: 0 50 C Calculated MTBF: 20,000 hours Noise: Less than 40 db
 Process integration direct interface between the robot and the ATM Worker satisfaction Return on")
6 Case Study: Diebold Nixon Productivity gains (up to 300%) Quality improvement (100% repeatability and fully random cycling) Process integration direct interface between the robot and the ATM Worker satisfaction Return on Investment

7 Group of Research in Electrotechnics and Automation University of Le Havre Normandy Prof. Jean-François Brethé University founded in 1984, 8000 students 11 Labs in humanities, science and technology GREAH founded in 1999, 7 full professors, 9 associate professors and 21 PhD Renewable Energy and electrotechnics design Automation and robotics




8 Our expertise in relation with the project Robots precision Characterisation, conception and control of robotic arms to achieve better precision 8

9 Our expertise in relation to the project Robotics For logistics Dual arm manipulator for palettising Mobile manipulators 9
10 Our Role in the project Communicate and find partners with logistics companies Create on-line courses and tutorials for the academic and industrial dissemination of the project outputs Design innovative arm and gripper for the project Develop and integrate the robotic arm and gripper onto the AGV/mobile robot in our experimental robotic platform for logistics applications (PIL) Develop innovative software libraries and interface with COROT modules hardware / software Human resources PhD funded by the project : Design and control of a robotic arm and gripper to be integrated on a mobile robot (3 years) The selection process is over : Ms Wafae Sebbata Post-doc (12 months) to work on the topics related to vision GREAH full-time staff and researchers 10



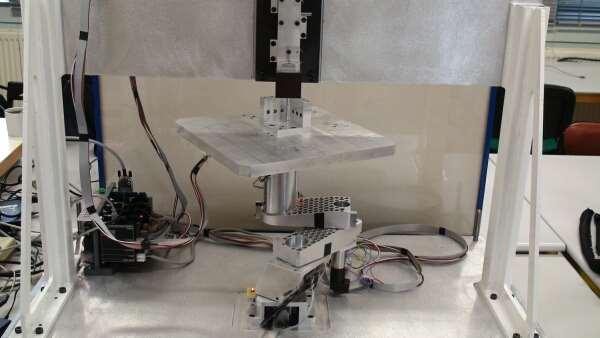
11 Experimental platform 11

12 State of the art: mobile manipulators Industrial robots mounted on a mobile base or AGV Stamina project 12





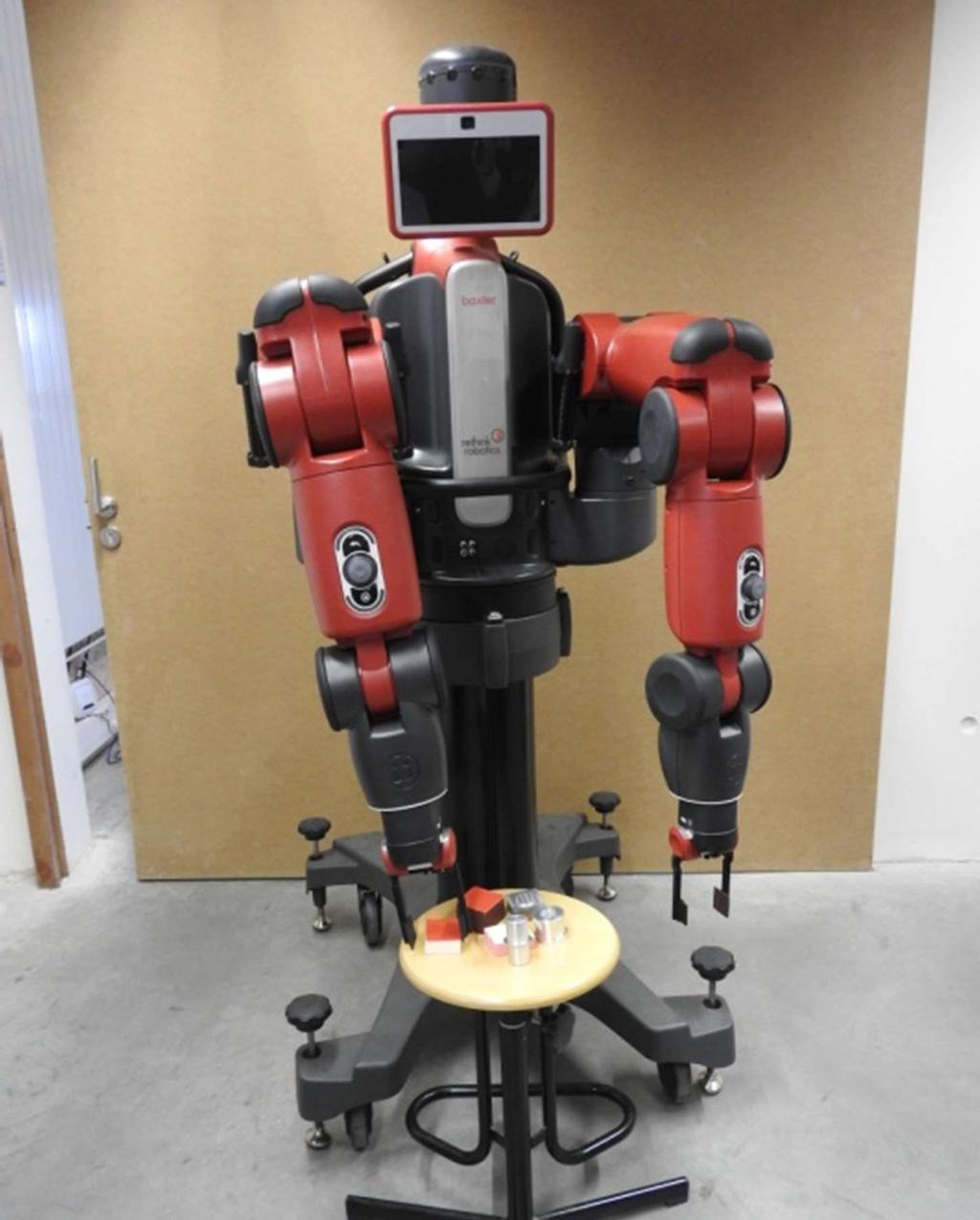
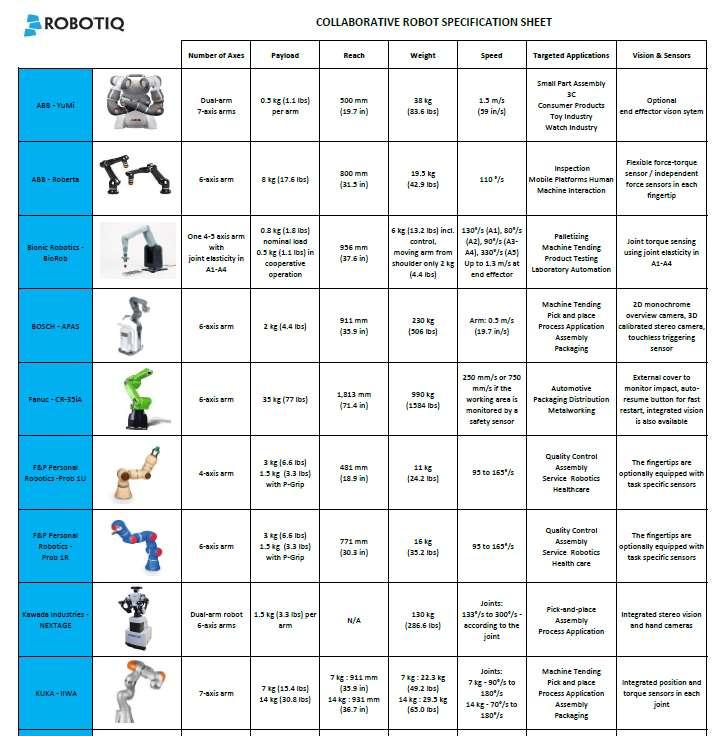
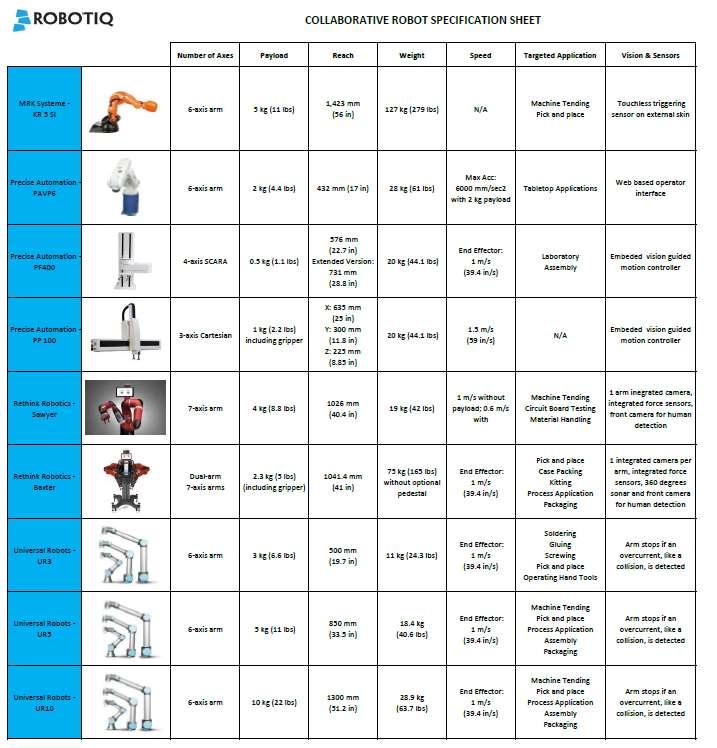
13 State of the art: mobile manipulators Specially designed cobots Ref : On robotiq internet site: review of collaborative robots 13
14 14
15 15



16 Grippers!!! 16




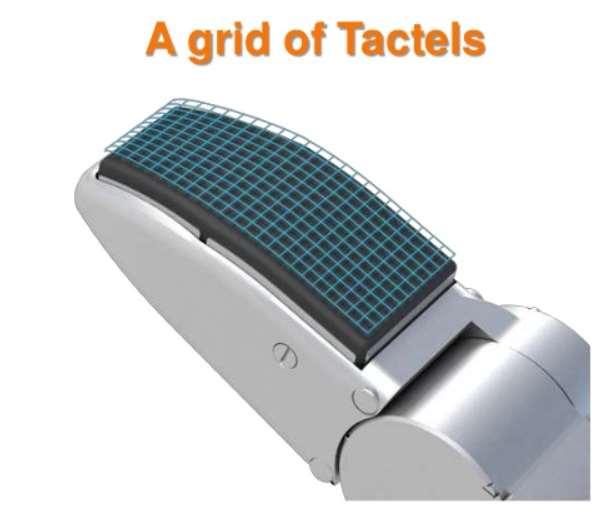
17 Sensors!! Which? Where? What for? 17
 18")
18 Questions for Autofina and University of Le Havre Max 2 mins :) 18 19/06/2018
19 2020 Vision: COROT Challenges and Opportunities 2020 Vision what will a successful AGV / Robot arm look like features, characteristics, USP, markets Challenges 1. Social human computer interaction, workplace integration, etc. 2. Technical vision systems, software, hardware 3. Business / Economic disruption, competition, collaboration, low cost, high cost, etc. 4. Environmental energy consumption, disposal, environmental benefits, etc. 5. Political e.g. loss of low skilled jobs, policy support, etc. 6. Legal e.g. health and safety risks, unions, etc. Opportunities Sectors, markets, applications Niches 19 19/06/2018
20 Team Working on 4 major challenges Process Plenary discussion of major challenges / prioritise (5-10 mins) 4 Groups 1 challenge per group 10 minutes discussion 2 minutes feedback to group Final thoughts and wrap-up 20 19/06/2018

21 21 19/06/2018
John Henry Foster INTRODUCING OUR NEW ROBOTICS LINE. Imagine Your Business...better. Automate Virtually Anything jhfoster.
 John Henry Foster INTRODUCING OUR NEW ROBOTICS LINE Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 What if you could automate the repetitive manual
John Henry Foster INTRODUCING OUR NEW ROBOTICS LINE Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 What if you could automate the repetitive manual
ROBOTIC AUTOMATION Imagine Your Business...better. Automate Virtually Anything
 John Henry Foster ROBOTIC AUTOMATION Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 At John Henry Foster, we re devoted to bringing safe, flexible,
John Henry Foster ROBOTIC AUTOMATION Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 At John Henry Foster, we re devoted to bringing safe, flexible,
Since FLEXIBLE MANUFACTURING SYSTEM
 Since 1992 www.hytecheducation.in FLEXIBLE MANUFACTURING SYSTEM Flexible Manufacturing System with Conveyor Floor mounted machines Vertical axes are with brake motors Pneumatic grippers for loading and
Since 1992 www.hytecheducation.in FLEXIBLE MANUFACTURING SYSTEM Flexible Manufacturing System with Conveyor Floor mounted machines Vertical axes are with brake motors Pneumatic grippers for loading and
Chapter 1 Introduction to Robotics
 Chapter 1 Introduction to Robotics PS: Most of the pages of this presentation were obtained and adapted from various sources in the internet. 1 I. Definition of Robotics Definition (Robot Institute of
Chapter 1 Introduction to Robotics PS: Most of the pages of this presentation were obtained and adapted from various sources in the internet. 1 I. Definition of Robotics Definition (Robot Institute of
VM-G Series Vertical articulated robot
 VM-G Series Vertical articulated robot Robot Specifications (1) VM-6083G (Nickname: VM1000) Item Standard type (VM) Specifications Dust-proof & splash-proof type (VM-W) Model name of robot set (Note 1)
VM-G Series Vertical articulated robot Robot Specifications (1) VM-6083G (Nickname: VM1000) Item Standard type (VM) Specifications Dust-proof & splash-proof type (VM-W) Model name of robot set (Note 1)
Low cost bench-top 5/6 axis general purpose articulated robot arm
 Low cost bench-top 5/6 axis general purpose articulated robot arm Description R17 (Deucaleon) is a low cost entry to robotics, fast, accurate and reliable and easy to program. It has a long reach and therefore
Low cost bench-top 5/6 axis general purpose articulated robot arm Description R17 (Deucaleon) is a low cost entry to robotics, fast, accurate and reliable and easy to program. It has a long reach and therefore
Introduction to robotics. Md. Ferdous Alam, Lecturer, MEE, SUST
 Introduction to robotics Md. Ferdous Alam, Lecturer, MEE, SUST Hello class! Let s watch a video! So, what do you think? It s cool, isn t it? The dedication is not! A brief history The first digital and
Introduction to robotics Md. Ferdous Alam, Lecturer, MEE, SUST Hello class! Let s watch a video! So, what do you think? It s cool, isn t it? The dedication is not! A brief history The first digital and
2nd Call for Proposals
 2nd Call for Proposals Deadline 21 October 2013 Living Knowledge Conference, Copenhagen, 9-11 April 2014 An Innovative Civil Society: Impact through Co-creation and Participation Venue: Hotel Scandic Sydhavnen,
2nd Call for Proposals Deadline 21 October 2013 Living Knowledge Conference, Copenhagen, 9-11 April 2014 An Innovative Civil Society: Impact through Co-creation and Participation Venue: Hotel Scandic Sydhavnen,
Comau AURA - Advanced Use Robotic Arm AURA. Soft as a Human Touch
 AURA Soft as a Human Touch 2 The Culture of Automation Designing advanced automation solutions means thinking about the industry in a new way, developing new scenarios, designing innovative products and
AURA Soft as a Human Touch 2 The Culture of Automation Designing advanced automation solutions means thinking about the industry in a new way, developing new scenarios, designing innovative products and
Accessible Power Tool Flexible Application Scalable Solution
 Accessible Power Tool Flexible Application Scalable Solution Franka Emika GmbH Our vision of a robot for everyone sensitive, interconnected, adaptive and cost-efficient. Even today, robotics remains a
Accessible Power Tool Flexible Application Scalable Solution Franka Emika GmbH Our vision of a robot for everyone sensitive, interconnected, adaptive and cost-efficient. Even today, robotics remains a
AURA Soft as a Human Touch
 The Culture of Automation AURA Soft as a Human Touch Designing advanced automation solutions means thinking about the industry in a new way, developing new scenarios, designing innovative products and
The Culture of Automation AURA Soft as a Human Touch Designing advanced automation solutions means thinking about the industry in a new way, developing new scenarios, designing innovative products and
Control of the Robot, Using the Teach Pendant
 Exercise 1-2 Control of the Robot, Using the Teach Pendant EXERCISE OBJECTIVE In the first part of this exercise, you will use the optional Teach Pendant to change the coordinates of each robot's articulation,
Exercise 1-2 Control of the Robot, Using the Teach Pendant EXERCISE OBJECTIVE In the first part of this exercise, you will use the optional Teach Pendant to change the coordinates of each robot's articulation,
Is your next colleague a cobot?
 Is your next colleague a cobot? Technifutur 29 November 2016 30.11.16 1 Agenda Main features Cobots vs industrial robots Add-ons Trends Case assessment Demonstrator 30.11.16 2 What s in a name? "Collaborative
Is your next colleague a cobot? Technifutur 29 November 2016 30.11.16 1 Agenda Main features Cobots vs industrial robots Add-ons Trends Case assessment Demonstrator 30.11.16 2 What s in a name? "Collaborative
Kawasaki Robot EX100. Spot Welding Material Handling
 Kawasaki Robot Kawasaki E Series EX100 Spot Welding Material Handling Takes up small space, but covers wide envelope Kawasaki EX100 will do various jobs such as spot welding or handling in all kinds factory
Kawasaki Robot Kawasaki E Series EX100 Spot Welding Material Handling Takes up small space, but covers wide envelope Kawasaki EX100 will do various jobs such as spot welding or handling in all kinds factory
SHANTILAL SHAH ENGINEERING COLLEGE. Production engineering department. Computer Aided Manufacturing ( ) Laboratory Manual
 Laboratory Manual") SHANTILAL SHAH ENGINEERING COLLEGE Production engineering department Computer Aided Manufacturing (2171903) Laboratory Manual Compiled by: Prof. Khushbu P. Patel LIST OF EXPERIMENTS 1. Study of Computer
SHANTILAL SHAH ENGINEERING COLLEGE Production engineering department Computer Aided Manufacturing (2171903) Laboratory Manual Compiled by: Prof. Khushbu P. Patel LIST OF EXPERIMENTS 1. Study of Computer
Lab Design of FANUC Robot Operation for Engineering Technology Major Students
 Paper ID #21185 Lab Design of FANUC Robot Operation for Engineering Technology Major Students Dr. Maged Mikhail, Purdue University Northwest Dr. Maged B.Mikhail, Assistant Professor, Mechatronics Engineering
Paper ID #21185 Lab Design of FANUC Robot Operation for Engineering Technology Major Students Dr. Maged Mikhail, Purdue University Northwest Dr. Maged B.Mikhail, Assistant Professor, Mechatronics Engineering
Robotic modeling and simulation of palletizer robot using Workspace5
 Robotic modeling and simulation of palletizer robot using Workspace5 Nory Afzan Mohd Johari, Habibollah Haron, Abdul Syukor Mohamad Jaya Department of Modeling and Industrial Computing Faculty of Computer
Robotic modeling and simulation of palletizer robot using Workspace5 Nory Afzan Mohd Johari, Habibollah Haron, Abdul Syukor Mohamad Jaya Department of Modeling and Industrial Computing Faculty of Computer
Laboratory Mini-Projects Summary
 ME 4290/5290 Mechanics & Control of Robotic Manipulators Dr. Bob, Fall 2017 Robotics Laboratory Mini-Projects (LMP 1 8) Laboratory Exercises: The laboratory exercises are to be done in teams of two (or
ME 4290/5290 Mechanics & Control of Robotic Manipulators Dr. Bob, Fall 2017 Robotics Laboratory Mini-Projects (LMP 1 8) Laboratory Exercises: The laboratory exercises are to be done in teams of two (or
Research Activities of the Mechatronic and Robotic Systems Laboratory
 Research Activities of the Mechatronic and Robotic Systems Laboratory Scott Nokleby, PhD, PEng Director scott.nokleby@uoit.ca mars.engineering.uoit.ca Current Projects Automation of Nuclear Fuel Manufacturing
Research Activities of the Mechatronic and Robotic Systems Laboratory Scott Nokleby, PhD, PEng Director scott.nokleby@uoit.ca mars.engineering.uoit.ca Current Projects Automation of Nuclear Fuel Manufacturing
Framework Programme 7
 Framework Programme 7 1 Joining the EU programmes as a Belarusian 1. Introduction to the Framework Programme 7 2. Focus on evaluation issues + exercise 3. Strategies for Belarusian organisations + exercise
Framework Programme 7 1 Joining the EU programmes as a Belarusian 1. Introduction to the Framework Programme 7 2. Focus on evaluation issues + exercise 3. Strategies for Belarusian organisations + exercise
Kid-Size Humanoid Soccer Robot Design by TKU Team
 Kid-Size Humanoid Soccer Robot Design by TKU Team Ching-Chang Wong, Kai-Hsiang Huang, Yueh-Yang Hu, and Hsiang-Min Chan Department of Electrical Engineering, Tamkang University Tamsui, Taipei, Taiwan E-mail:
Kid-Size Humanoid Soccer Robot Design by TKU Team Ching-Chang Wong, Kai-Hsiang Huang, Yueh-Yang Hu, and Hsiang-Min Chan Department of Electrical Engineering, Tamkang University Tamsui, Taipei, Taiwan E-mail:
Exercise 1-1. Control of the Robot, Using RoboCIM EXERCISE OBJECTIVE
 Exercise 1-1 Control of the Robot, Using RoboCIM EXERCISE OBJECTIVE In the first part of this exercise, you will use the RoboCIM software in the Simulation mode. You will change the coordinates of each
Exercise 1-1 Control of the Robot, Using RoboCIM EXERCISE OBJECTIVE In the first part of this exercise, you will use the RoboCIM software in the Simulation mode. You will change the coordinates of each
Positioning Paper Demystifying Collaborative Industrial Robots
 Positioning Paper Demystifying Collaborative Industrial Robots published by International Federation of Robotics Frankfurt, Germany December 2018 A positioning paper by the International Federation of
Positioning Paper Demystifying Collaborative Industrial Robots published by International Federation of Robotics Frankfurt, Germany December 2018 A positioning paper by the International Federation of
Enterprise ISEA of the Future a Technology Vision for Fleet Support
 N A V S E A N WA VA SR EF A RWE A CR EF NA RT E R CS E N T E R S Enterprise ISEA of the Future a Technology Vision for Fleet Support Paul D. Mann, SES NSWC PHD Division Technical Director April 10, 2018
N A V S E A N WA VA SR EF A RWE A CR EF NA RT E R CS E N T E R S Enterprise ISEA of the Future a Technology Vision for Fleet Support Paul D. Mann, SES NSWC PHD Division Technical Director April 10, 2018
Applying Robotic Technologies to Improve Manufacturing Processes
 Applying Robotic Technologies to Improve Manufacturing Processes CrossRobotics.com What Can You Automate? Use Our Expertise to Configure Your Entire Robotic Cell If you ve always thought robotic automation
Applying Robotic Technologies to Improve Manufacturing Processes CrossRobotics.com What Can You Automate? Use Our Expertise to Configure Your Entire Robotic Cell If you ve always thought robotic automation
HexGen HEX HL Hexapod Six-DOF Positioning System
 HexGen HE300-230HL Hexapods and Robotics HexGen HE300-230HL Hexapod Six-DOF Positioning System Six degree-of-freedom positioning with linear travels to 60 mm and angular travels to 30 Precision design
HexGen HE300-230HL Hexapods and Robotics HexGen HE300-230HL Hexapod Six-DOF Positioning System Six degree-of-freedom positioning with linear travels to 60 mm and angular travels to 30 Precision design
Standard specifications MG15HL*E58
 Standard specifications MG15HL*E58 1st Edition : 2nd Edition : January 15, 2018 January 18, 2019 KAWASAKI HEAVY INDUSTRIES, LTD. ROBOT DIVISION Specification : (Arm): * F,G,R,S (Controller): Materials
Standard specifications MG15HL*E58 1st Edition : 2nd Edition : January 15, 2018 January 18, 2019 KAWASAKI HEAVY INDUSTRIES, LTD. ROBOT DIVISION Specification : (Arm): * F,G,R,S (Controller): Materials
Franka Emika GmbH. Our vision of a robot for everyone sensitive, interconnected, adaptive and cost-efficient.
 Franka Emika GmbH Our vision of a robot for everyone sensitive, interconnected, adaptive and cost-efficient. Even today, robotics remains a technology accessible only to few. The reasons for this are the
Franka Emika GmbH Our vision of a robot for everyone sensitive, interconnected, adaptive and cost-efficient. Even today, robotics remains a technology accessible only to few. The reasons for this are the
Robots Learning from Robots: A proof of Concept Study for Co-Manipulation Tasks. Luka Peternel and Arash Ajoudani Presented by Halishia Chugani
 Robots Learning from Robots: A proof of Concept Study for Co-Manipulation Tasks Luka Peternel and Arash Ajoudani Presented by Halishia Chugani Robots learning from humans 1. Robots learn from humans 2.
Robots Learning from Robots: A proof of Concept Study for Co-Manipulation Tasks Luka Peternel and Arash Ajoudani Presented by Halishia Chugani Robots learning from humans 1. Robots learn from humans 2.
HexGen HEX HL Hexapod Six-DOF Positioning System
 HexGen HE300-230HL Hexapods and Robotics HexGen HE300-230HL Hexapod Six-DOF Positioning System Six degree-of-freedom positioning with linear travels to 60 mm and angular travels to 30 Precision design
HexGen HE300-230HL Hexapods and Robotics HexGen HE300-230HL Hexapod Six-DOF Positioning System Six degree-of-freedom positioning with linear travels to 60 mm and angular travels to 30 Precision design
BionicCobot Sensitive helper for human-robot collaboration
 BionicCobot Sensitive helper for human-robot collaboration BionicCobot Sensitive helper for human-robot collaboration 01 Cell Coexistence Synchronised Cooperation Collaboration Fraunhofer IAO, study of
BionicCobot Sensitive helper for human-robot collaboration BionicCobot Sensitive helper for human-robot collaboration 01 Cell Coexistence Synchronised Cooperation Collaboration Fraunhofer IAO, study of
HexGen HEX HL Hexapod Six-DOF Positioning System
 HexGen HE300-230HL Hexapods and Robotics HexGen HE300-230HL Hexapod Six-DOF Positioning System Six degree-of-freedom positioning with linear travels to 60 mm and angular travels to 30 Precision design
HexGen HE300-230HL Hexapods and Robotics HexGen HE300-230HL Hexapod Six-DOF Positioning System Six degree-of-freedom positioning with linear travels to 60 mm and angular travels to 30 Precision design
WFEO STANDING COMMITTEE ON ENGINEERING FOR INNOVATIVE TECHNOLOGY (WFEO-CEIT) STRATEGIC PLAN ( )
 STRATEGIC PLAN ( )") WFEO STANDING COMMITTEE ON ENGINEERING FOR INNOVATIVE TECHNOLOGY (WFEO-CEIT) STRATEGIC PLAN (2016-2019) Hosted by The China Association for Science and Technology March, 2016 WFEO-CEIT STRATEGIC PLAN (2016-2019)
WFEO STANDING COMMITTEE ON ENGINEERING FOR INNOVATIVE TECHNOLOGY (WFEO-CEIT) STRATEGIC PLAN (2016-2019) Hosted by The China Association for Science and Technology March, 2016 WFEO-CEIT STRATEGIC PLAN (2016-2019)
Applying Robotic Technologies to Improve Manufacturing Processes
 Applying Robotic Technologies to Improve Manufacturing Processes CrossRobotics.com What Can You Automate? Use Our Expertise to Configure Your Entire Robotic Cell If you ve always thought robotic automation
Applying Robotic Technologies to Improve Manufacturing Processes CrossRobotics.com What Can You Automate? Use Our Expertise to Configure Your Entire Robotic Cell If you ve always thought robotic automation
School of Computer Science CPS813 Final Exercise: Plutonium Dioxide Dilemma (Ex PDD)
") CPS813 Final Exercise: Plutonium Dioxide Dilemma (Ex PDD) Situation A container of plutonium dioxide has been discovered at Ryerson University in the Library s Collaboratorium. Ryerson Security and Emergency
CPS813 Final Exercise: Plutonium Dioxide Dilemma (Ex PDD) Situation A container of plutonium dioxide has been discovered at Ryerson University in the Library s Collaboratorium. Ryerson Security and Emergency
School of Informatics Director of Commercialisation and Industry Engagement
 School of Informatics Director of Commercialisation and Industry Engagement January 2017 Contents 1. Our Vision 2. The School of Informatics 3. The University of Edinburgh - Mission Statement 4. The Role
School of Informatics Director of Commercialisation and Industry Engagement January 2017 Contents 1. Our Vision 2. The School of Informatics 3. The University of Edinburgh - Mission Statement 4. The Role
2014 Market Trends Webinar Series
 Robotic Industries Association 2014 Market Trends Webinar Series Watch live or archived at no cost Learn about the latest innovations in robotics Sponsored by leading robotics companies 1 2014 Calendar
Robotic Industries Association 2014 Market Trends Webinar Series Watch live or archived at no cost Learn about the latest innovations in robotics Sponsored by leading robotics companies 1 2014 Calendar
Academia Box. 6-axis robot training cell Robotics Academy
 Academia Box 6-axis robot training cell Robotics Academy The perfect introduction to the fascinating world of robotics The automation boom has continued unabated for many years now, and robots are becoming
Academia Box 6-axis robot training cell Robotics Academy The perfect introduction to the fascinating world of robotics The automation boom has continued unabated for many years now, and robots are becoming
THE HUMAN POWER AMPLIFIER TECHNOLOGY APPLIED TO MATERIAL HANDLING
 THE HUMAN POWER AMPLIFIER TECHNOLOGY APPLIED TO MATERIAL HANDLING H. Kazerooni Mechanical Engineering Department Human Engineering Laboratory (HEL) University ofcajifomia, Berkeley, CA 94720-1740 USA E-Mail:
THE HUMAN POWER AMPLIFIER TECHNOLOGY APPLIED TO MATERIAL HANDLING H. Kazerooni Mechanical Engineering Department Human Engineering Laboratory (HEL) University ofcajifomia, Berkeley, CA 94720-1740 USA E-Mail:
League <BART LAB AssistBot (THAILAND)>
>") RoboCup@Home League 2013 Jackrit Suthakorn, Ph.D.*, Woratit Onprasert, Sakol Nakdhamabhorn, Rachot Phuengsuk, Yuttana Itsarachaiyot, Choladawan Moonjaita, Syed Saqib Hussain
RoboCup@Home League 2013 Jackrit Suthakorn, Ph.D.*, Woratit Onprasert, Sakol Nakdhamabhorn, Rachot Phuengsuk, Yuttana Itsarachaiyot, Choladawan Moonjaita, Syed Saqib Hussain
Design and Control of an Anthropomorphic Robotic Arm
 Journal Of Industrial Engineering Research ISSN- 2077-4559 Journal home page: http://www.iwnest.com/ijer/ 2016. 2(1): 1-8 RSEARCH ARTICLE Design and Control of an Anthropomorphic Robotic Arm Simon A/L
Journal Of Industrial Engineering Research ISSN- 2077-4559 Journal home page: http://www.iwnest.com/ijer/ 2016. 2(1): 1-8 RSEARCH ARTICLE Design and Control of an Anthropomorphic Robotic Arm Simon A/L
Medical Robotics LBR Med
 Medical Robotics LBR Med EN KUKA, a proven robotics partner. Discerning users around the world value KUKA as a reliable partner. KUKA has branches in over 30 countries, and for over 40 years, we have been
Medical Robotics LBR Med EN KUKA, a proven robotics partner. Discerning users around the world value KUKA as a reliable partner. KUKA has branches in over 30 countries, and for over 40 years, we have been
T.C. MARMARA UNIVERSITY FACULTY of ENGINEERING COMPUTER ENGINEERING DEPARTMENT
 T.C. MARMARA UNIVERSITY FACULTY of ENGINEERING COMPUTER ENGINEERING DEPARTMENT CSE497 Engineering Project Project Specification Document INTELLIGENT WALL CONSTRUCTION BY MEANS OF A ROBOTIC ARM Group Members
T.C. MARMARA UNIVERSITY FACULTY of ENGINEERING COMPUTER ENGINEERING DEPARTMENT CSE497 Engineering Project Project Specification Document INTELLIGENT WALL CONSTRUCTION BY MEANS OF A ROBOTIC ARM Group Members
FP7 ICT Call 6: Cognitive Systems and Robotics
 FP7 ICT Call 6: Cognitive Systems and Robotics Information day Luxembourg, January 14, 2010 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media
FP7 ICT Call 6: Cognitive Systems and Robotics Information day Luxembourg, January 14, 2010 Libor Král, Head of Unit Unit E5 - Cognitive Systems, Interaction, Robotics DG Information Society and Media
Robots in society: Event 2
 Robots in society: Event 2 Service Robots Professor Gurvinder Singh Virk Technical Director, InnotecUK Trustee, CLAWAR Association Ltd Innovative Technology and Science Ltd InnoTecUK set up in 2009 and
Robots in society: Event 2 Service Robots Professor Gurvinder Singh Virk Technical Director, InnotecUK Trustee, CLAWAR Association Ltd Innovative Technology and Science Ltd InnoTecUK set up in 2009 and
How To Create The Right Collaborative System For Your Application. Corey Ryan Manager - Medical Robotics KUKA Robotics Corporation
 How To Create The Right Collaborative System For Your Application Corey Ryan Manager - Medical Robotics KUKA Robotics Corporation C Definitions Cobot: for this presentation a robot specifically designed
How To Create The Right Collaborative System For Your Application Corey Ryan Manager - Medical Robotics KUKA Robotics Corporation C Definitions Cobot: for this presentation a robot specifically designed
Innovation and Funding Priorities at the Technology Strategy Board
 Innovation and Funding Priorities at the Technology Strategy Board John Morlidge 19 April 2010 V2 140508 The Technology Strategy Board is A national body supporting business innovation for business benefit
Innovation and Funding Priorities at the Technology Strategy Board John Morlidge 19 April 2010 V2 140508 The Technology Strategy Board is A national body supporting business innovation for business benefit
Wireless Master-Slave Embedded Controller for a Teleoperated Anthropomorphic Robotic Arm with Gripping Force Sensing
 Wireless Master-Slave Embedded Controller for a Teleoperated Anthropomorphic Robotic Arm with Gripping Force Sensing Presented by: Benjamin B. Rhoades ECGR 6185 Adv. Embedded Systems January 16 th 2013
Wireless Master-Slave Embedded Controller for a Teleoperated Anthropomorphic Robotic Arm with Gripping Force Sensing Presented by: Benjamin B. Rhoades ECGR 6185 Adv. Embedded Systems January 16 th 2013
JEPPIAAR ENGINEERING COLLEGE
 JEPPIAAR ENGINEERING COLLEGE Jeppiaar Nagar, Rajiv Gandhi Salai 600 119 DEPARTMENT OFMECHANICAL ENGINEERING QUESTION BANK VII SEMESTER ME6010 ROBOTICS Regulation 013 JEPPIAAR ENGINEERING COLLEGE Jeppiaar
JEPPIAAR ENGINEERING COLLEGE Jeppiaar Nagar, Rajiv Gandhi Salai 600 119 DEPARTMENT OFMECHANICAL ENGINEERING QUESTION BANK VII SEMESTER ME6010 ROBOTICS Regulation 013 JEPPIAAR ENGINEERING COLLEGE Jeppiaar
STRATEGIC FRAMEWORK Updated August 2017
 STRATEGIC FRAMEWORK Updated August 2017 STRATEGIC FRAMEWORK The UC Davis Library is the academic hub of the University of California, Davis, and is ranked among the top academic research libraries in North
STRATEGIC FRAMEWORK Updated August 2017 STRATEGIC FRAMEWORK The UC Davis Library is the academic hub of the University of California, Davis, and is ranked among the top academic research libraries in North
Robotic Systems. Jeff Jaster Deputy Associate Director for Autonomous Systems US Army TARDEC Intelligent Ground Systems
 Robotic Systems Jeff Jaster Deputy Associate Director for Autonomous Systems US Army TARDEC Intelligent Ground Systems Robotics Life Cycle Mission Integrate, Explore, and Develop Robotics, Network and
Robotic Systems Jeff Jaster Deputy Associate Director for Autonomous Systems US Army TARDEC Intelligent Ground Systems Robotics Life Cycle Mission Integrate, Explore, and Develop Robotics, Network and
Dario della Sala ENEA Research Centre «Casaccia», Rome (Italy)
") Lessons learned about SMEs in OLAE Dario della Sala ENEA Research Centre «Casaccia», Rome (Italy) Experience gained in Italy Phase 1 Concept dissemination About 10 slides (in italian) were arranged and
Lessons learned about SMEs in OLAE Dario della Sala ENEA Research Centre «Casaccia», Rome (Italy) Experience gained in Italy Phase 1 Concept dissemination About 10 slides (in italian) were arranged and
Chapter 14 Automation of Manufacturing Processes and Systems
 Chapter 14 Automation of Manufacturing Processes and Systems Topics in Chapter 14 FIGURE 14.1 Outline of topics described in this chapter. Date 1500Ğ1600 1600Ğ1700 1700Ğ1800 1800Ğ1900 Development Water
Chapter 14 Automation of Manufacturing Processes and Systems Topics in Chapter 14 FIGURE 14.1 Outline of topics described in this chapter. Date 1500Ğ1600 1600Ğ1700 1700Ğ1800 1800Ğ1900 Development Water
ACTIVITY REPORT OF THE NATIONAL INDUSTRIAL COMPETITIVENESS COMMISSION PRAMONĖ 4.0 OF 2017
 ACTIVITY REPORT OF THE NATIONAL INDUSTRIAL COMPETITIVENESS COMMISSION PRAMONĖ 4.0 OF 2017 23 April 2018 Vilnius 2 I. Introduction On 19 April 2016, The European Commission (hereinafter referred to as the
ACTIVITY REPORT OF THE NATIONAL INDUSTRIAL COMPETITIVENESS COMMISSION PRAMONĖ 4.0 OF 2017 23 April 2018 Vilnius 2 I. Introduction On 19 April 2016, The European Commission (hereinafter referred to as the
Innovation Management & Technology Transfer Innovation Management & Technology Transfer
 Innovation Management & Technology Transfer Nuno Gonçalves Minsk, April 15th 2014 nunogoncalves@spi.pt 1 Introduction to SPI Opening of SPI USA office in Irvine, California Beginning of activities in Porto
Innovation Management & Technology Transfer Nuno Gonçalves Minsk, April 15th 2014 nunogoncalves@spi.pt 1 Introduction to SPI Opening of SPI USA office in Irvine, California Beginning of activities in Porto
FMCG companies approach & challenges to Robot Adoption
 FMCG companies approach & challenges to Robot Adoption Tooling Geoff J Kerr Director Procter & Gamble eurobotics BoD (2015-2017) Who is P&G? A Company of Leading Brands Across our ten categories, P&G has
FMCG companies approach & challenges to Robot Adoption Tooling Geoff J Kerr Director Procter & Gamble eurobotics BoD (2015-2017) Who is P&G? A Company of Leading Brands Across our ten categories, P&G has
Chapter 1 Introduction
 Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
Chapter 1 Introduction It is appropriate to begin the textbook on robotics with the definition of the industrial robot manipulator as given by the ISO 8373 standard. An industrial robot manipulator is
A Novel Robotic Manufacturing System for Learning Innovation
 A Novel Robotic Manufacturing System for Learning Innovation Yuxin Liang 1, Jin Hu 2, Xiumin Diao 2 1 School of Agricultural & Biological Engineering 2 School of Engineering Technology Purdue University,
A Novel Robotic Manufacturing System for Learning Innovation Yuxin Liang 1, Jin Hu 2, Xiumin Diao 2 1 School of Agricultural & Biological Engineering 2 School of Engineering Technology Purdue University,
Design and Control of the BUAA Four-Fingered Hand
 Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Design and Control of the BUAA Four-Fingered Hand Y. Zhang, Z. Han, H. Zhang, X. Shang, T. Wang,
Proceedings of the 2001 IEEE International Conference on Robotics & Automation Seoul, Korea May 21-26, 2001 Design and Control of the BUAA Four-Fingered Hand Y. Zhang, Z. Han, H. Zhang, X. Shang, T. Wang,
PIglide AT3 Linear Stage with Air Bearings
 PIglide AT3 Linear Stage with Air Bearings High Performance Nanopositioning Stage A-123 Ideal for scanning applications or highprecision positioning Cleanroom compatible Size of the motion platform 210
PIglide AT3 Linear Stage with Air Bearings High Performance Nanopositioning Stage A-123 Ideal for scanning applications or highprecision positioning Cleanroom compatible Size of the motion platform 210
 UNIT-1 INTRODUCATION The field of robotics has its origins in science fiction. The term robot was derived from the English translation of a fantasy play written in Czechoslovakia around 1920. It took another
UNIT-1 INTRODUCATION The field of robotics has its origins in science fiction. The term robot was derived from the English translation of a fantasy play written in Czechoslovakia around 1920. It took another
ROBOTIC MANIPULATION AND HAPTIC FEEDBACK VIA HIGH SPEED MESSAGING WITH THE JOINT ARCHITECTURE FOR UNMANNED SYSTEMS (JAUS)
") ROBOTIC MANIPULATION AND HAPTIC FEEDBACK VIA HIGH SPEED MESSAGING WITH THE JOINT ARCHITECTURE FOR UNMANNED SYSTEMS (JAUS) Dr. Daniel Kent, * Dr. Thomas Galluzzo*, Dr. Paul Bosscher and William Bowman INTRODUCTION
ROBOTIC MANIPULATION AND HAPTIC FEEDBACK VIA HIGH SPEED MESSAGING WITH THE JOINT ARCHITECTURE FOR UNMANNED SYSTEMS (JAUS) Dr. Daniel Kent, * Dr. Thomas Galluzzo*, Dr. Paul Bosscher and William Bowman INTRODUCTION
Automation and Control Electrical Engineering
 Automation and Control Electrical Engineering Technical University of Denmark DTU-Building 326 DK-2800 Kgs. Lyngby Denmark aut.elektro.dtu.dk Ole Ravn Total students ~9.300 including Ph.D. 1.150 and Int.
Automation and Control Electrical Engineering Technical University of Denmark DTU-Building 326 DK-2800 Kgs. Lyngby Denmark aut.elektro.dtu.dk Ole Ravn Total students ~9.300 including Ph.D. 1.150 and Int.
Cognitive robots and emotional intelligence Cloud robotics Ethical, legal and social issues of robotic Construction robots Human activities in many
 Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Preface The jubilee 25th International Conference on Robotics in Alpe-Adria-Danube Region, RAAD 2016 was held in the conference centre of the Best Western Hotel M, Belgrade, Serbia, from 30 June to 2 July
Korea Humanoid Robot Projects
 Korea Humanoid Robot Projects Jun Ho Oh HUBO Lab., KAIST KOREA Humanoid Projects(~2001) A few humanoid robot projects were existed. Most researches were on dynamic and kinematic simulations for walking
Korea Humanoid Robot Projects Jun Ho Oh HUBO Lab., KAIST KOREA Humanoid Projects(~2001) A few humanoid robot projects were existed. Most researches were on dynamic and kinematic simulations for walking
Centre for Doctoral Training: opportunities and ideas
 Centre for Doctoral Training: opportunities and ideas PROFESSOR ANGELA HATTON NOC ASSOCIATION 7 TH ANNUAL MEETING 30 TH MARCH 2017 Responsive versus focused training Responsive PhD training Topic is chosen
Centre for Doctoral Training: opportunities and ideas PROFESSOR ANGELA HATTON NOC ASSOCIATION 7 TH ANNUAL MEETING 30 TH MARCH 2017 Responsive versus focused training Responsive PhD training Topic is chosen
Beyond Industry 4.0 & Implications for Industrial Policy (including in Hungary)
") Beyond Industry 4.0 & Implications for Industrial Policy (including in Hungary) 16 th Annual HRSA Conference, October 2018 David Bailey Aston Business School Lisa De Propris Bimingham Business School Today:
Beyond Industry 4.0 & Implications for Industrial Policy (including in Hungary) 16 th Annual HRSA Conference, October 2018 David Bailey Aston Business School Lisa De Propris Bimingham Business School Today:
Robotics as it should be Simple Flexible Affordable
 Robotics as it should be Simple Flexible Affordable TECHNICAL SPECIFICATIONS: www.universal-robots.com/products 195 PERIOD DAYS AVERAGE PAYBACK Robotics Is Finally Within Your Reach Universal Robots offers
Robotics as it should be Simple Flexible Affordable TECHNICAL SPECIFICATIONS: www.universal-robots.com/products 195 PERIOD DAYS AVERAGE PAYBACK Robotics Is Finally Within Your Reach Universal Robots offers
BUILT IN SAFETY SYSTEM CE APPROVED SMALL AND SMART CALL ME COWELDER 1 A COLLABORATIVE WELDING ROBOT
 BUILT IN SAFETY SYSTEM CE APPROVED...... SMALL AND SMART CALL ME COWELDER 1 A COLLABORATIVE WELDING ROBOT CONTENT A new welding assistant 3 Technical data welding machines 4 Technical data UR5 5 CoWelder
BUILT IN SAFETY SYSTEM CE APPROVED...... SMALL AND SMART CALL ME COWELDER 1 A COLLABORATIVE WELDING ROBOT CONTENT A new welding assistant 3 Technical data welding machines 4 Technical data UR5 5 CoWelder
Prof. Ciro Natale. Francesco Castaldo Andrea Cirillo Pasquale Cirillo Umberto Ferrara Luigi Palmieri
 Real Time Control of an Anthropomorphic Robotic Arm using FPGA Advisor: Prof. Ciro Natale Students: Francesco Castaldo Andrea Cirillo Pasquale Cirillo Umberto Ferrara Luigi Palmieri Objective Introduction
Real Time Control of an Anthropomorphic Robotic Arm using FPGA Advisor: Prof. Ciro Natale Students: Francesco Castaldo Andrea Cirillo Pasquale Cirillo Umberto Ferrara Luigi Palmieri Objective Introduction
PIMag Precision Linear Stage
 PIMag Precision Linear Stage High Velocity and Precision due to Magnetic Direct Drive V-551 Travel ranges to 230 mm Velocity up to 0.5 m/s Absolute encoder with 1 nm resolution Highest precision with PIOne
PIMag Precision Linear Stage High Velocity and Precision due to Magnetic Direct Drive V-551 Travel ranges to 230 mm Velocity up to 0.5 m/s Absolute encoder with 1 nm resolution Highest precision with PIOne
Global Partner Summit 2017: Competing to Win
 February 14 17 Napa, California Global Partner Summit 2017: Competing to Win Global Partner Summit 2017: Competing to Win 1 Why Germany? Stephan Reimelt President and CEO Germany and Austria Why Germany?
February 14 17 Napa, California Global Partner Summit 2017: Competing to Win Global Partner Summit 2017: Competing to Win 1 Why Germany? Stephan Reimelt President and CEO Germany and Austria Why Germany?
CAPACITIES FOR TECHNOLOGY TRANSFER
 CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
DOC-CAREERS II Project, Final conference Brussels 2012 University-Industry Intellectual property rights: Balancing interests
 1 DOC-CAREERS II Project, Final conference Brussels 2012 University-Industry Intellectual property rights: Balancing interests Intellectual Properties at NTNU Knut J. Egelie Senior IPR manager, NTNU Technology
1 DOC-CAREERS II Project, Final conference Brussels 2012 University-Industry Intellectual property rights: Balancing interests Intellectual Properties at NTNU Knut J. Egelie Senior IPR manager, NTNU Technology
Human-like Assembly Robots in Factories
 5-88 June Symposium on Japan America Frontier of Engineering (JAFOE) Robotics Session: Human-like Assembly Robots in Factories 8th June Robotics Technology R&D Group Shingo Ando 0520 Introduction: Overview
5-88 June Symposium on Japan America Frontier of Engineering (JAFOE) Robotics Session: Human-like Assembly Robots in Factories 8th June Robotics Technology R&D Group Shingo Ando 0520 Introduction: Overview
Technology that supports dish washing with kitchen robots
 Press Release The University of Tokyo Technology that supports dish washing with kitchen robots The Tokyo University IRT Research Agency has developed a technology that supports dish washing using kitchen
Press Release The University of Tokyo Technology that supports dish washing with kitchen robots The Tokyo University IRT Research Agency has developed a technology that supports dish washing using kitchen
Workshop IROS 2015 Robotic co-workers methods, challenges and industrial test cases
 Björn Matthias, ABB Corporate Research, 2015-09-28 New safety standards for collaborative robots, ABB YuMi dual-arm robot Workshop IROS 2015 Robotic co-workers methods, challenges and industrial test cases
Björn Matthias, ABB Corporate Research, 2015-09-28 New safety standards for collaborative robots, ABB YuMi dual-arm robot Workshop IROS 2015 Robotic co-workers methods, challenges and industrial test cases
Baxter Safety and Compliance Overview
 Baxter Safety and Compliance Overview How this unique collaborative robot safely manages operational risks Unlike typical industrial robots that operate behind safeguarding, Baxter, the collaborative robot
Baxter Safety and Compliance Overview How this unique collaborative robot safely manages operational risks Unlike typical industrial robots that operate behind safeguarding, Baxter, the collaborative robot
Robotics as it should be Simple Flexible Affordable
 Robotics as it should be Simple Flexible Affordable TECHNICAL SPECIFICATIONS: www.universal-robots.com/products Robotics Is Finally Within Universal Robots offers significant productivity and safety advantages,
Robotics as it should be Simple Flexible Affordable TECHNICAL SPECIFICATIONS: www.universal-robots.com/products Robotics Is Finally Within Universal Robots offers significant productivity and safety advantages,
Angle Encoder Modules
 Angle Encoder Modules May 2015 Angle encoder modules Angle encoder modules from HEIDENHAIN are combinations of angle encoders and high-precision bearings that are optimally adjusted to each other. They
Angle Encoder Modules May 2015 Angle encoder modules Angle encoder modules from HEIDENHAIN are combinations of angle encoders and high-precision bearings that are optimally adjusted to each other. They
COMPARISON BETWEEN CONVENTIONAL MILLING AND CLIMB MILLING IN ROBOTIC DEBURRING OF PLASTIC PARTS
 Proceedings in Manufacturing Systems, Volume 11, Issue 3, 2016, 165 170 ISSN 2067-9238 COMPARISON BETWEEN CONVENTIONAL MILLING AND CLIMB MILLING IN ROBOTIC DEBURRING OF PLASTIC PARTS Andrei Mario IVAN
Proceedings in Manufacturing Systems, Volume 11, Issue 3, 2016, 165 170 ISSN 2067-9238 COMPARISON BETWEEN CONVENTIONAL MILLING AND CLIMB MILLING IN ROBOTIC DEBURRING OF PLASTIC PARTS Andrei Mario IVAN
THE INNOVATION COMPANY ROBOTICS. Institute for Robotics and Mechatronics
 THE INNOVATION COMPANY ROBOTICS Institute for Robotics and Mechatronics The fields in which we research and their associated infrastructure enable us to carry out pioneering research work and provide solutions
THE INNOVATION COMPANY ROBOTICS Institute for Robotics and Mechatronics The fields in which we research and their associated infrastructure enable us to carry out pioneering research work and provide solutions
ROMEO Humanoid for Action and Communication. Rodolphe GELIN Aldebaran Robotics
 ROMEO Humanoid for Action and Communication Rodolphe GELIN Aldebaran Robotics 7 th workshop on Humanoid November Soccer 2012 Robots Osaka, November 2012 Overview French National Project labeled by Cluster
ROMEO Humanoid for Action and Communication Rodolphe GELIN Aldebaran Robotics 7 th workshop on Humanoid November Soccer 2012 Robots Osaka, November 2012 Overview French National Project labeled by Cluster
Voodoo Manufacturing triples 3D printing production using collaborative robots
 Video to embed: https://www.youtube.com/watch?v=qo_rtzei_7y Voodoo Manufacturing triples 3D printing production using collaborative robots Voodoo Manufacturing in Brooklyn, New York, runs a rapidly growing
Video to embed: https://www.youtube.com/watch?v=qo_rtzei_7y Voodoo Manufacturing triples 3D printing production using collaborative robots Voodoo Manufacturing in Brooklyn, New York, runs a rapidly growing
The Industrial Strategy Challenge Fund
 The Industrial Strategy Challenge Fund Mike Biddle Programme Director Industrial Strategy Challenge Fund @Mike_Biddle Harwell - 28 th November 2017 (v4) [Official] Overview 1. Industrial Strategy & the
The Industrial Strategy Challenge Fund Mike Biddle Programme Director Industrial Strategy Challenge Fund @Mike_Biddle Harwell - 28 th November 2017 (v4) [Official] Overview 1. Industrial Strategy & the
Screw Driven automation tables
 automation tables Precise multi-axis positioning systems play an integral part in today s semiconductor, computer peripheral, solar power, flat panel, life sciences, lab automation, biomedical and electronics
automation tables Precise multi-axis positioning systems play an integral part in today s semiconductor, computer peripheral, solar power, flat panel, life sciences, lab automation, biomedical and electronics
THE FIRST COLLABORATIVE ROBOT THAT REPORTS STRAIGHT TO YOUR WRIST
 THE FIRST COLLABORATIVE ROBOT THAT REPORTS STRAIGHT TO YOUR WRIST PULSE ROBOTIC ARM THE FIRST COLLABORATIVE ROBOT THAT REPORTS STRAIGHT TO YOUR WRIST PULSE is a new-generation robotic arm that welcomes
THE FIRST COLLABORATIVE ROBOT THAT REPORTS STRAIGHT TO YOUR WRIST PULSE ROBOTIC ARM THE FIRST COLLABORATIVE ROBOT THAT REPORTS STRAIGHT TO YOUR WRIST PULSE is a new-generation robotic arm that welcomes
Success Stories within Factories of the Future
 Success Stories within Factories of the Future Patrick Kennedy Communications Advisor European Factories of the Future Research Association EFFRA Representing private side in Factories of the Future PPP
Success Stories within Factories of the Future Patrick Kennedy Communications Advisor European Factories of the Future Research Association EFFRA Representing private side in Factories of the Future PPP
Factories of the Future 2020 Roadmap. PPP Info Days 9 July 2012 Rikardo Bueno Anirban Majumdar
 Factories of the Future 2020 Roadmap PPP Info Days 9 July 2012 Rikardo Bueno Anirban Majumdar RD&I roadmap 2014-2020 roadmap will cover R&D and innovation activities guiding principles: industry competitiveness,
Factories of the Future 2020 Roadmap PPP Info Days 9 July 2012 Rikardo Bueno Anirban Majumdar RD&I roadmap 2014-2020 roadmap will cover R&D and innovation activities guiding principles: industry competitiveness,
Shared Investment. Shared Success. ReMAP Call for Proposals by Expression of Interest
 Shared Investment. Shared Success. ReMAP 2.0 2018 Call for Proposals by Expression of Interest What s a BL-NCE? Refined Manufacturing Acceleration Process (ReMAP) is an innovation accelerator focused on
Shared Investment. Shared Success. ReMAP 2.0 2018 Call for Proposals by Expression of Interest What s a BL-NCE? Refined Manufacturing Acceleration Process (ReMAP) is an innovation accelerator focused on
Perfectly integrated!
 Servo drive CMMT-AS and servo motor EMMT-AS Simply very functional! Perfectly integrated! Highlights Ideal with CPX-E or controllers from third-party suppliers Quick commissioning of the complete drive
Servo drive CMMT-AS and servo motor EMMT-AS Simply very functional! Perfectly integrated! Highlights Ideal with CPX-E or controllers from third-party suppliers Quick commissioning of the complete drive
2010/3 Science and technology for development. The Economic and Social Council,
 Resolution 2010/3 Science and technology for development The Economic and Social Council, Recalling the 2005 World Summit Outcome, which emphasizes the role of science and technology, including information
Resolution 2010/3 Science and technology for development The Economic and Social Council, Recalling the 2005 World Summit Outcome, which emphasizes the role of science and technology, including information
Industrial and service robotics: state of the art and trends Paolo Rocco
 Industrial and service robotics: state of the art and trends Paolo Rocco Politecnico di Milano - Dipartimento di Elettronica, Informazione e Bioingegneria Workshop Future trends in machine tools and manufacturing
Industrial and service robotics: state of the art and trends Paolo Rocco Politecnico di Milano - Dipartimento di Elettronica, Informazione e Bioingegneria Workshop Future trends in machine tools and manufacturing
Adaptive Touch Sampling for Energy-Efficient Mobile Platforms
 Adaptive Touch Sampling for Energy-Efficient Mobile Platforms Kyungtae Han Intel Labs, USA Alexander W. Min, Dongho Hong, Yong-joon Park Intel Corporation, USA April 16, 2015 Touch Interface in Today s
Adaptive Touch Sampling for Energy-Efficient Mobile Platforms Kyungtae Han Intel Labs, USA Alexander W. Min, Dongho Hong, Yong-joon Park Intel Corporation, USA April 16, 2015 Touch Interface in Today s
Danish Technological Institute Soeren Stjernqvist, CEO. Introduction It s all about innovation Governance The weather forecast
 Danish Technological Institute Soeren Stjernqvist, CEO Introduction It s all about innovation Governance The weather forecast Snapshot of Danish national performance Export: Back on track at post crisis
Danish Technological Institute Soeren Stjernqvist, CEO Introduction It s all about innovation Governance The weather forecast Snapshot of Danish national performance Export: Back on track at post crisis
BENEFITS OF A DUAL-ARM ROBOTIC SYSTEM
 Part one of a four-part ebook Series. BENEFITS OF A DUAL-ARM ROBOTIC SYSTEM Don t just move through your world INTERACT with it. A Publication of RE2 Robotics Table of Contents Introduction What is a Highly
Part one of a four-part ebook Series. BENEFITS OF A DUAL-ARM ROBOTIC SYSTEM Don t just move through your world INTERACT with it. A Publication of RE2 Robotics Table of Contents Introduction What is a Highly
S3P AGRI-FOOD Updates and next steps. Thematic Partnership TRACEABILITY AND BIG DATA Andalusia
 S3P AGRI-FOOD Updates and next steps Thematic Partnership TRACEABILITY AND BIG DATA Andalusia judit.anda@juntadeandalucia.es internacional.viceconsejeria.capder@juntadeandalucia.es Agro food Digital Innovation
S3P AGRI-FOOD Updates and next steps Thematic Partnership TRACEABILITY AND BIG DATA Andalusia judit.anda@juntadeandalucia.es internacional.viceconsejeria.capder@juntadeandalucia.es Agro food Digital Innovation
Easy-To-Use Graphic Interface
 Graphical Robot Programming Teachbox for Robot W 711 The Wittmann CNC 6.2 robot control with color graphics screens allows simpler robot teaching and use than ever before. The operator simply traces out
Graphical Robot Programming Teachbox for Robot W 711 The Wittmann CNC 6.2 robot control with color graphics screens allows simpler robot teaching and use than ever before. The operator simply traces out
Information and Program
 Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
Robotics 1 Information and Program Prof. Alessandro De Luca Robotics 1 1 Robotics 1 2017/18! First semester (12 weeks)! Monday, October 2, 2017 Monday, December 18, 2017! Courses of study (with this course
DESIGN OF A CONTROLLER FOR AN INDUSTRIAL ROBOT ABB IRB 2000
 DESIGN OF A CONTROLLER FOR AN INDUSTRIAL ROBOT ABB IRB 2000 Cirilo Alberto Hernández Alejo, Rubisel Martínez Morales, Diego Del Angel Del Angel Advisor: Miguel Angel Barron Castelan Instituto Tecnológico
DESIGN OF A CONTROLLER FOR AN INDUSTRIAL ROBOT ABB IRB 2000 Cirilo Alberto Hernández Alejo, Rubisel Martínez Morales, Diego Del Angel Del Angel Advisor: Miguel Angel Barron Castelan Instituto Tecnológico