Introduction to ABB Labs. TA s: Ryan Mocadlo Adam Gatehouse
|
|
|
- Isabella Newton
- 5 years ago
- Views:
Transcription
 Adam Gatehouse (ajgatehouse@wpi.")
1 Introduction to ABB Labs TA s: Ryan Mocadlo Adam Gatehouse
 Lab 3: Offline Robot Programming (Use of Robot Studio) Lab 4: Palletizing Exercise (Use of external")
2 Labs In-depth lab guidelines found on Canvas Must read before coming to lab section Total of 4 Labs: Lab 1: Jogging the Robot (Getting familiar with the Pendent) Lab 2: Online Robot Programming (Intro to Rapid Code) Lab 3: Offline Robot Programming (Use of Robot Studio) Lab 4: Palletizing Exercise (Use of external devices)



3 ABB Robot IRB axis Handling Capacity: 6kg Reach : 1.45m I/O Device Flex Pendant PLC Hardware




4 External Hardware Other peripheral devices may be used with the ABB Cameras Force Sensors Limit Switches Communication with ABB I/O PLC TCP/IP



5 EOAT Parallel Gripper Angular Gripper Radial Gripper Suction Cup
6 Software Robot Studio Available on Campus computers & for a 30-day free trial (Trial Download) Simulation and offline programming software Rapid Code High level language Other coding experience is not a requirement, but may be useful Examples: Python, LabView, OpenCV, Matlab

7 Robot Studio/Rapid Example
8 TA s and Scheduling Ryan Mocadlo Make appointment by (mocad@wpi.edu) Adam Gatehouse Make appointment by (ajgatehouse@wpi.edu) Project/Lab Groups: Please create your groups on Canvas by today at 5pm Sign up for 2, 1 hour lab blocks using the google sheets link on Canvas Schedule TA s will be available to answer any questions during lab hours
9 Report To be submitted on Canvas only (no hard copies) a week after your second session Rubrics for each lab posted week before lab Grade given will be either A, B, or C Allowed one resubmission per lab Grade will be increased by one letter if the group is able to address the graders comments Two strong example reports are discussed below (more examples uploaded to canvas)
10 Ordering of Parts No budget for purchasing of parts Variety of parts already in lab Work with TA s to find best supplier Ability to use machine shop for custom parts TA s can provide help on the machines in the shop Link for necessary CAD files: CAD Files Do not breakdown, or remove items from the lab that are not your own
11 Safety Must take basic safety quiz before entering the machine shop Find on mfelabs.org Must gain Advanced User status to use the additional shop machinery Ask TA for more information Will gain Project Space User access Allows for access to the ABB robot whenever a Lab Monitor is present

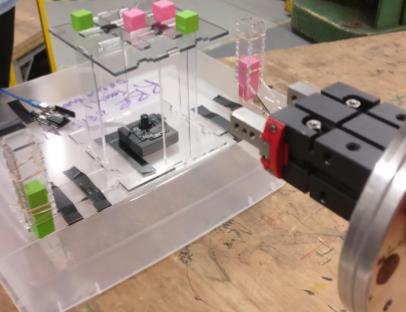
12 Past Project (Industrial) For this project, we decided to have the ABB IRB 1600 Industrial Robot stamp different words onto a piece of paper depending on user input. Our inspiration for this arose from the Sorority Recruitment season, which requires decorative name tags for all of the sisters for each round. This means that someone must write down all 100+ names for each round, for three rounds. We decided to use this project to explore an opportunity to automate this process by simply inputting names and having the robot stamp the input. The challenge in this task is that the program and robot would have to complete the following: Split the string input into individual characters Locate the stamp with the correct first character in the workspace Lift the stamp and stamp it onto an ink pad Lift the stamp again and stamp it onto the piece of paper in the correct location Place the stamp back in the correct holding location Repeat this process with the next character in the string At the end of the process, pick up the piece of paper and place it into the finished bin


13 Past Project (Industrial)
14 Past Project (Robotics) For this project, an ABB IRB1600 industrial robot was configured to play a game of tic tac toe with a human player. The game pieces were 5 pink and 5 green cubes. An Arduino Uno connected to a Pixy camera was able determine which cells of the 3x3 playing grid were occupied by which color cube. To simplify the problem, the robot was always the first player and always used the green cubes. The Arduino script chose the optimal grid cell to place the cube and output it as a number 0-8 corresponding to each grid cell. A LabVIEW program interpreted the Arduino output into a format usable by the NI USB-6525 DAQ. The RAPID code then determined which path to follow based on the status of the input lines of the NI DAQ. The game ended when a player got three game pieces in a row or all nine grid cells are occupied. The objective of this project is to program the robot to autonomously play tic tac toe with a human player using color detection. This project was successfully completed with the robot playing against a human player. Using predictive tic tac toe logic, the robot never lost a game against a human. The Pixy, Arduino, LabVIEW, and NI DAQ components were successfully able to communicate to complete the task.



15 Past Project (Robotics)
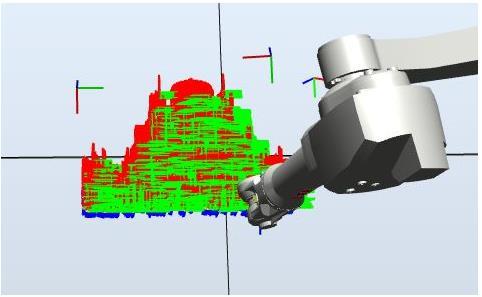
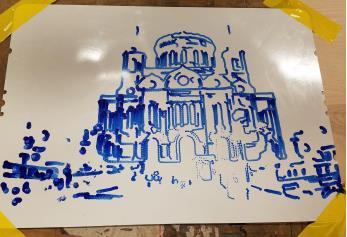
16 Past Project (Robotics) Using robots to draw is an emerging artform. To expand this field, a method for sketching any image, on a dry erase board, using an ABB IRB 1600 industrial robot, was developed. The four tasks to complete this goal include: developing the mechanical fixturing for the marker, writing path perception algorithms, porting the computer vision data to the robot s proprietary controller, and a full system integration and test. The provided 3- pronged radial gripper with custom 3D printed finger was used to grasp an Expo brand, bullet-tipped, dry erase marker. An 18 x 24 inch whiteboard was featured in the workspace to draw upon. To perceive to curve to sketch form the image, two main procedures were used from MATLAB s image processing toolbox. First, canny edge transform was performed on the reduced grayscale image. Then a breadth-first search algorithm was developed to generate a collection of vectors representing a list of paths, with each path being made up of groupings of coordinates. The next step was to import the paths into the ABB proprietary software, RobotStudio, and RAPID programing language. To accomplish this, the path data was written to a text file using RAPID syntax and pasted into RobotStudio. The final system was largely successful in sketching the image. Mechanically, there were issues with line thickness consistency as the board table is not entirely level as the marker was very rigidly held in the end of arm tool. Future iterations may include improved marker fixturing, further algorithm refinement, and multiple colors.

17 Past Project (Robotics)
18 Video Example Simulation
Note: Objective: Prelab: ME 5286 Robotics Labs Lab 1: Hello Cobot World Duration: 2 Weeks (1/22/2018 2/02/2018)
") ME 5286 Robotics Labs Lab 1: Hello Cobot World Duration: 2 Weeks (1/22/2018 2/02/2018) Note: At least two people must be present in the lab when operating the UR5 robot. Upload a selfie of you, your partner,
ME 5286 Robotics Labs Lab 1: Hello Cobot World Duration: 2 Weeks (1/22/2018 2/02/2018) Note: At least two people must be present in the lab when operating the UR5 robot. Upload a selfie of you, your partner,
Unit 12: Artificial Intelligence CS 101, Fall 2018
 Unit 12: Artificial Intelligence CS 101, Fall 2018 Learning Objectives After completing this unit, you should be able to: Explain the difference between procedural and declarative knowledge. Describe the
Unit 12: Artificial Intelligence CS 101, Fall 2018 Learning Objectives After completing this unit, you should be able to: Explain the difference between procedural and declarative knowledge. Describe the
Note: Objective: Prelab: ME 5286 Robotics Labs Lab 1: Hello Cobot World Duration: 2 Weeks (1/28/2019 2/08/2019)
") ME 5286 Robotics Labs Lab 1: Hello Cobot World Duration: 2 Weeks (1/28/2019 2/08/2019) Note: At least two people must be present in the lab when operating the UR5 robot. Upload a selfie of you, your partner,
ME 5286 Robotics Labs Lab 1: Hello Cobot World Duration: 2 Weeks (1/28/2019 2/08/2019) Note: At least two people must be present in the lab when operating the UR5 robot. Upload a selfie of you, your partner,
Automated Shingling. Team 1, Robot Autonomy (16-662), Spring Eitan Babcock, Dan Berman, Sean Bryan, Rushat Gupta Chadha, Pranav Maheshwari
, Spring Eitan Babcock, Dan Berman, Sean Bryan, Rushat Gupta Chadha, Pranav Maheshwari") Automated Shingling Team 1, Robot Autonomy (16-662), Spring 2016 Eitan Babcock, Dan Berman, Sean Bryan, Rushat Gupta Chadha, Pranav Maheshwari Table of Contents The Problem.....2 Background.. 2 What we
Automated Shingling Team 1, Robot Autonomy (16-662), Spring 2016 Eitan Babcock, Dan Berman, Sean Bryan, Rushat Gupta Chadha, Pranav Maheshwari Table of Contents The Problem.....2 Background.. 2 What we
CPSC 217 Assignment 3 Due Date: Friday March 30, 2018 at 11:59pm
 CPSC 217 Assignment 3 Due Date: Friday March 30, 2018 at 11:59pm Weight: 8% Individual Work: All assignments in this course are to be completed individually. Students are advised to read the guidelines
CPSC 217 Assignment 3 Due Date: Friday March 30, 2018 at 11:59pm Weight: 8% Individual Work: All assignments in this course are to be completed individually. Students are advised to read the guidelines
GIS Programming Practicuum
 New Course for Fall 2009 GIS Programming Practicuum Geo 599 2 credits, Monday 4:00-5:20 CRN: 18970 Using Python scripting with ArcGIS Python scripting is a powerful tool for automating many geoprocessing
New Course for Fall 2009 GIS Programming Practicuum Geo 599 2 credits, Monday 4:00-5:20 CRN: 18970 Using Python scripting with ArcGIS Python scripting is a powerful tool for automating many geoprocessing
For our EC331 project we successfully designed and implemented a PIC based Tic-Tac-Toe game using the PIC16874.
 EC331 Project Report To: Dr. Song From: Colin Hill and Peter Haugen Date: 6/7/2004 Project: Pic based Tic-Tac-Toe System Introduction: For our EC331 project we successfully designed and implemented a PIC
EC331 Project Report To: Dr. Song From: Colin Hill and Peter Haugen Date: 6/7/2004 Project: Pic based Tic-Tac-Toe System Introduction: For our EC331 project we successfully designed and implemented a PIC
Embedded Systems Lab
 Embedded Systems Lab UNIVERSITY OF JORDAN Tic-Tac-Toe GAME PROJECT Embedded lab Engineers Page 1 of 5 Preferred Group Size Grading Project Due Date (2) Two is the allowed group size. The group can be from
Embedded Systems Lab UNIVERSITY OF JORDAN Tic-Tac-Toe GAME PROJECT Embedded lab Engineers Page 1 of 5 Preferred Group Size Grading Project Due Date (2) Two is the allowed group size. The group can be from
FACULTY MENTOR Khoshabeh, Ramsin. PROJECT TITLE PiB: Learning Python
 PiB: Learning Python hands-on development skills to engineering students. This PiB is a set of independent programs that strengthen the student s programming skills through Python, utilizing Python libraries
PiB: Learning Python hands-on development skills to engineering students. This PiB is a set of independent programs that strengthen the student s programming skills through Python, utilizing Python libraries
UNIT VI. Current approaches to programming are classified as into two major categories:
 Unit VI 1 UNIT VI ROBOT PROGRAMMING A robot program may be defined as a path in space to be followed by the manipulator, combined with the peripheral actions that support the work cycle. Peripheral actions
Unit VI 1 UNIT VI ROBOT PROGRAMMING A robot program may be defined as a path in space to be followed by the manipulator, combined with the peripheral actions that support the work cycle. Peripheral actions
LESSONS Lesson 1. Microcontrollers and SBCs. The Big Idea: Lesson 1: Microcontrollers and SBCs. Background: What, precisely, is computer science?
 LESSONS Lesson Lesson : Microcontrollers and SBCs Microcontrollers and SBCs The Big Idea: This book is about computer science. It is not about the Arduino, the C programming language, electronic components,
LESSONS Lesson Lesson : Microcontrollers and SBCs Microcontrollers and SBCs The Big Idea: This book is about computer science. It is not about the Arduino, the C programming language, electronic components,
https://www.teachersp ayteachers.com/store/ Worksheetjunkie
 https://www.teachersp ayteachers.com/store/ Worksheetjunkie Copyright 2017 IDEA GALAXY. All rights reserved by author. Permission to copy for single classroom use only. Electronic distribution limited
https://www.teachersp ayteachers.com/store/ Worksheetjunkie Copyright 2017 IDEA GALAXY. All rights reserved by author. Permission to copy for single classroom use only. Electronic distribution limited
THESE ARE NOT TOYS!! IF YOU CAN NOT FOLLOW THE DIRECTIONS, YOU WILL NOT USE THEM!!
 ROBOTICS If you were to walk into any major manufacturing plant today, you would see robots hard at work. Businesses have used robots for many reasons. Robots do not take coffee breaks, vacations, call
ROBOTICS If you were to walk into any major manufacturing plant today, you would see robots hard at work. Businesses have used robots for many reasons. Robots do not take coffee breaks, vacations, call
Word Work Choices. During Daily 5, these are the choices they can do for word work. They make a choice and grab a spelling list.
 Word Work Choices During Daily 5, these are the choices they can do for word work. They make a choice and grab a spelling list. Letter Cubes Unifix cubes that I wrote letters on. I keep them in baggies.
Word Work Choices During Daily 5, these are the choices they can do for word work. They make a choice and grab a spelling list. Letter Cubes Unifix cubes that I wrote letters on. I keep them in baggies.
2 Robot Pick and Place
 2 Robot Pick and Place NAME: Date: Section: INTRODUCTION Robotic arms are excellent for performing pick and place operations such as placing small electronic components on circuit boards, as well as large
2 Robot Pick and Place NAME: Date: Section: INTRODUCTION Robotic arms are excellent for performing pick and place operations such as placing small electronic components on circuit boards, as well as large
MEM455/800 Robotics II/Advance Robotics Winter 2009
 Admin Stuff Course Website: http://robotics.mem.drexel.edu/mhsieh/courses/mem456/ MEM455/8 Robotics II/Advance Robotics Winter 9 Professor: Ani Hsieh Time: :-:pm Tues, Thurs Location: UG Lab, Classroom
Admin Stuff Course Website: http://robotics.mem.drexel.edu/mhsieh/courses/mem456/ MEM455/8 Robotics II/Advance Robotics Winter 9 Professor: Ani Hsieh Time: :-:pm Tues, Thurs Location: UG Lab, Classroom
AC : THE UBIQUITOUS MICROCONTROLLER IN MECHANICAL ENGINEERING: MEASUREMENT SYSTEMS
 AC 8-1513: THE UBIQUITOUS MICROCONTROLLER IN MECHANICAL ENGINEERING: MEASUREMENT SYSTEMS Michael Holden, California Maritime Academy Michael Holden teaches in the department of Mechanical Engineering at
AC 8-1513: THE UBIQUITOUS MICROCONTROLLER IN MECHANICAL ENGINEERING: MEASUREMENT SYSTEMS Michael Holden, California Maritime Academy Michael Holden teaches in the department of Mechanical Engineering at
Lab 7: 3D Tic-Tac-Toe
 Lab 7: 3D Tic-Tac-Toe Overview: Khan Academy has a great video that shows how to create a memory game. This is followed by getting you started in creating a tic-tac-toe game. Both games use a 2D grid or
Lab 7: 3D Tic-Tac-Toe Overview: Khan Academy has a great video that shows how to create a memory game. This is followed by getting you started in creating a tic-tac-toe game. Both games use a 2D grid or
Interactive Tic Tac Toe
 Interactive Tic Tac Toe Stefan Bennie Botha Thesis presented in fulfilment of the requirements for the degree of Honours of Computer Science at the University of the Western Cape Supervisor: Mehrdad Ghaziasgar
Interactive Tic Tac Toe Stefan Bennie Botha Thesis presented in fulfilment of the requirements for the degree of Honours of Computer Science at the University of the Western Cape Supervisor: Mehrdad Ghaziasgar
EE 4314 Lab 3 Handout Speed Control of the DC Motor System Using a PID Controller Fall Lab Information
 EE 4314 Lab 3 Handout Speed Control of the DC Motor System Using a PID Controller Fall 2012 IMPORTANT: This handout is common for all workbenches. 1. Lab Information a) Date, Time, Location, and Report
EE 4314 Lab 3 Handout Speed Control of the DC Motor System Using a PID Controller Fall 2012 IMPORTANT: This handout is common for all workbenches. 1. Lab Information a) Date, Time, Location, and Report
PROGRAMMING ABB INDUSTRIAL ROBOT FOR REDUCING WELDING CYCLE TIME.
 PROGRAMMING ABB INDUSTRIAL ROBOT FOR REDUCING WELDING CYCLE TIME. Sanket.Dattaram.Parab, V.S.Narwane PG (Dept. of Mechanical Engineering), Assoc. Prof. (Dept. of Mechanical Engineering) K. J. Somaiya College
PROGRAMMING ABB INDUSTRIAL ROBOT FOR REDUCING WELDING CYCLE TIME. Sanket.Dattaram.Parab, V.S.Narwane PG (Dept. of Mechanical Engineering), Assoc. Prof. (Dept. of Mechanical Engineering) K. J. Somaiya College
2359 (i.e. 11:59:00 pm) on 4/16/18 via Blackboard
 on 4/16/18 via Blackboard") CS 109: Introduction to Computer Science Goodney Spring 2018 Homework Assignment 4 Assigned: 4/2/18 via Blackboard Due: 2359 (i.e. 11:59:00 pm) on 4/16/18 via Blackboard Notes: a. This is the fourth homework
CS 109: Introduction to Computer Science Goodney Spring 2018 Homework Assignment 4 Assigned: 4/2/18 via Blackboard Due: 2359 (i.e. 11:59:00 pm) on 4/16/18 via Blackboard Notes: a. This is the fourth homework
Understanding the Arduino to LabVIEW Interface
 E-122 Design II Understanding the Arduino to LabVIEW Interface Overview The Arduino microcontroller introduced in Design I will be used as a LabVIEW data acquisition (DAQ) device/controller for Experiments
E-122 Design II Understanding the Arduino to LabVIEW Interface Overview The Arduino microcontroller introduced in Design I will be used as a LabVIEW data acquisition (DAQ) device/controller for Experiments
ENGI1020. Lab 0 Introduction to Arduino IDE and Hardware Lori Hogan, Lab Instructor - Winter 2019
 ENGI1020 Lab 0 Introduction to Arduino IDE and Hardware Lori Hogan, Lab Instructor - lehogan@mun.ca Winter 2019 What are we doing today? Overview of lab procedures, schedules, assessment Introduction to
ENGI1020 Lab 0 Introduction to Arduino IDE and Hardware Lori Hogan, Lab Instructor - lehogan@mun.ca Winter 2019 What are we doing today? Overview of lab procedures, schedules, assessment Introduction to
Measuring in Centimeters
 MD2-3 Measuring in Centimeters Pages 179 181 Standards: 2.MD.A.1 Goals: Students will measure pictures of objects in centimeters using centimeter cubes and then a centimeter ruler. Prior Knowledge Required:
MD2-3 Measuring in Centimeters Pages 179 181 Standards: 2.MD.A.1 Goals: Students will measure pictures of objects in centimeters using centimeter cubes and then a centimeter ruler. Prior Knowledge Required:
Theo du Plooy, ABB Technology day, May 2014 ABB RobotStudio VirtualRobot TM Technology. ABB Group May 27, 2014 Slide 1
 Theo du Plooy, ABB Technology day, May 2014 ABB RobotStudio VirtualRobot TM Technology ABB Group May 27, 2014 Slide 1 RobotStudio - true offline programming RobotStudio is the easy-to-use, low cost software
Theo du Plooy, ABB Technology day, May 2014 ABB RobotStudio VirtualRobot TM Technology ABB Group May 27, 2014 Slide 1 RobotStudio - true offline programming RobotStudio is the easy-to-use, low cost software
Intelligent Robotics Project and simulator
 Intelligent Robotics Project and simulator Thibaut Cuvelier 16 February 2017 Today s plan Project details Introduction to the simulator MATLAB for the simulator http://www.montefiore.ulg.ac.be/~tcuvelier/ir
Intelligent Robotics Project and simulator Thibaut Cuvelier 16 February 2017 Today s plan Project details Introduction to the simulator MATLAB for the simulator http://www.montefiore.ulg.ac.be/~tcuvelier/ir
Lab 2: Blinkie Lab. Objectives. Materials. Theory
 Lab 2: Blinkie Lab Objectives This lab introduces the Arduino Uno as students will need to use the Arduino to control their final robot. Students will build a basic circuit on their prototyping board and
Lab 2: Blinkie Lab Objectives This lab introduces the Arduino Uno as students will need to use the Arduino to control their final robot. Students will build a basic circuit on their prototyping board and
ME 5286 Robotics Lab Lab 4: Flashlight Assembly Duration: 3 Weeks (Mar 4 Mar 29; the 3 weeks does not include spring break)
") ME 5286 Robotics Lab Lab 4: Flashlight Assembly Duration: 3 Weeks (Mar 4 Mar 29; the 3 weeks does not include spring break) Note: Two people must be present in the lab when operating the UR5 robot. Read
ME 5286 Robotics Lab Lab 4: Flashlight Assembly Duration: 3 Weeks (Mar 4 Mar 29; the 3 weeks does not include spring break) Note: Two people must be present in the lab when operating the UR5 robot. Read
class TicTacToe: def init (self): # board is a list of 10 strings representing the board(ignore index 0) self.board = [" "]*10 self.
![class TicTacToe: def init (self): # board is a list of 10 strings representing the board(ignore index 0) self.board = [ ]*10 self.](/thumbs/95/123654288.jpg "class TicTacToe: def init (self): # board is a list of 10 strings representing the board(ignore index 0) self.board = [ ]*10 self.") The goal of this lab is to practice problem solving by implementing the Tic Tac Toe game. Tic Tac Toe is a game for two players who take turns to fill a 3 X 3 grid with either o or x. Each player alternates
The goal of this lab is to practice problem solving by implementing the Tic Tac Toe game. Tic Tac Toe is a game for two players who take turns to fill a 3 X 3 grid with either o or x. Each player alternates
Workshops Elisava Introduction to programming and electronics (Scratch & Arduino)
") Workshops Elisava 2011 Introduction to programming and electronics (Scratch & Arduino) What is programming? Make an algorithm to do something in a specific language programming. Algorithm: a procedure
Workshops Elisava 2011 Introduction to programming and electronics (Scratch & Arduino) What is programming? Make an algorithm to do something in a specific language programming. Algorithm: a procedure
Note: Objective: Prelab: ME 5286 Robotics Labs Lab 1: Hello World Duration: 1 Week
 ME 5286 Robotics Labs Lab 1: Hello World Duration: 1 Week Note: Two people must be present in the lab when operating the UR5 robot. Upload a selfie of you, your partner, and the robot to the Moodle submission
ME 5286 Robotics Labs Lab 1: Hello World Duration: 1 Week Note: Two people must be present in the lab when operating the UR5 robot. Upload a selfie of you, your partner, and the robot to the Moodle submission
Mini Project #2: Motion Planning and Generation for a Robot Arm
 Mini Project #2: Motion Planning and Generation for a Robot Arm Team Assignment: Your professor will assign the teams. You will have about 5 minutes to get acquainted, exchange contact information and
Mini Project #2: Motion Planning and Generation for a Robot Arm Team Assignment: Your professor will assign the teams. You will have about 5 minutes to get acquainted, exchange contact information and
EE-110 Introduction to Engineering & Laboratory Experience Saeid Rahimi, Ph.D. Labs Introduction to Arduino
 EE-110 Introduction to Engineering & Laboratory Experience Saeid Rahimi, Ph.D. Labs 10-11 Introduction to Arduino In this lab we will introduce the idea of using a microcontroller as a tool for controlling
EE-110 Introduction to Engineering & Laboratory Experience Saeid Rahimi, Ph.D. Labs 10-11 Introduction to Arduino In this lab we will introduce the idea of using a microcontroller as a tool for controlling
COSC 117 Spring 2018 Programming Project 3 Page 1 of 5. For this project, you will write a program that plays the game Tic Tac Toe.
 COSC 117 Spring 2018 Programming Project 3 Page 1 of 5 Tic Tac Toe For this project, you will write a program that plays the game Tic Tac Toe. Overview The program will welcome the user and ask if they
COSC 117 Spring 2018 Programming Project 3 Page 1 of 5 Tic Tac Toe For this project, you will write a program that plays the game Tic Tac Toe. Overview The program will welcome the user and ask if they
2014 Market Trends Webinar Series
 Robotic Industries Association 2014 Market Trends Webinar Series Watch live or archived at no cost Learn about the latest innovations in robotics Sponsored by leading robotics companies 1 2014 Calendar
Robotic Industries Association 2014 Market Trends Webinar Series Watch live or archived at no cost Learn about the latest innovations in robotics Sponsored by leading robotics companies 1 2014 Calendar
ART 20L: INTRODUCTION TO DRAWING
 ART 20L: INTRODUCTION TO DRAWING (DRAFT) Online Course Instructor: Grant Whipple, gwhipple@ucsc.edu Chat Office Hours (via Canvas): MW 10:00am-12:00pm PST Catalog Description: Traditional handmade drawing
ART 20L: INTRODUCTION TO DRAWING (DRAFT) Online Course Instructor: Grant Whipple, gwhipple@ucsc.edu Chat Office Hours (via Canvas): MW 10:00am-12:00pm PST Catalog Description: Traditional handmade drawing
CSC 110 Lab 4 Algorithms using Functions. Names:
 CSC 110 Lab 4 Algorithms using Functions Names: Tic- Tac- Toe Game Write a program that will allow two players to play Tic- Tac- Toe. You will be given some code as a starting point. Fill in the parts
CSC 110 Lab 4 Algorithms using Functions Names: Tic- Tac- Toe Game Write a program that will allow two players to play Tic- Tac- Toe. You will be given some code as a starting point. Fill in the parts
Tac Due: Sep. 26, 2012
 CS 195N 2D Game Engines Andy van Dam Tac Due: Sep. 26, 2012 Introduction This assignment involves a much more complex game than Tic-Tac-Toe, and in order to create it you ll need to add several features
CS 195N 2D Game Engines Andy van Dam Tac Due: Sep. 26, 2012 Introduction This assignment involves a much more complex game than Tic-Tac-Toe, and in order to create it you ll need to add several features
HIL Simulation Lab Work
 2017.03.09 HIL Simulation Lab Work with Step by Step Exercises that you can do in your own Pace http://home.hit.no/~hansha/?lab=hilsim Hans-Petter Halvorsen Introduction to HIL Lab Work Hans-Petter Halvorsen
2017.03.09 HIL Simulation Lab Work with Step by Step Exercises that you can do in your own Pace http://home.hit.no/~hansha/?lab=hilsim Hans-Petter Halvorsen Introduction to HIL Lab Work Hans-Petter Halvorsen
 SUMMER CAMPS www.robo-geek.ca 1.800.414.4109 Robo-Geek is a technology company founded by engineers to promote STEM, with the aim to foster students confidence and I Can do it attitude. Our staff consists
SUMMER CAMPS www.robo-geek.ca 1.800.414.4109 Robo-Geek is a technology company founded by engineers to promote STEM, with the aim to foster students confidence and I Can do it attitude. Our staff consists
Tic-tac-toe. Lars-Henrik Eriksson. Functional Programming 1. Original presentation by Tjark Weber. Lars-Henrik Eriksson (UU) Tic-tac-toe 1 / 23
 Tic-tac-toe 1 / 23") Lars-Henrik Eriksson Functional Programming 1 Original presentation by Tjark Weber Lars-Henrik Eriksson (UU) Tic-tac-toe 1 / 23 Take-Home Exam Take-Home Exam Lars-Henrik Eriksson (UU) Tic-tac-toe 2 / 23
Lars-Henrik Eriksson Functional Programming 1 Original presentation by Tjark Weber Lars-Henrik Eriksson (UU) Tic-tac-toe 1 / 23 Take-Home Exam Take-Home Exam Lars-Henrik Eriksson (UU) Tic-tac-toe 2 / 23
ENGR 1181 Lab 8: Train Project. - Project Description - Lab Procedure 8A - Lab Procedure 8B/8C - Notebook Guidelines
 ENGR 1181 Lab 8: Train Project - Project Description - Lab Procedure 8A - Lab Procedure 8B/8C - Notebook Guidelines 1 Project Description Project Description 2 Project Description Learning Objectives:
ENGR 1181 Lab 8: Train Project - Project Description - Lab Procedure 8A - Lab Procedure 8B/8C - Notebook Guidelines 1 Project Description Project Description 2 Project Description Learning Objectives:
Robotstudio. Offline Visual Programming & Simulation Tool
 Robotstudio Offline Visual Programming & Simulation Tool Akbar F. Moghaddam (Shahab) M.Sc. Of Robotics & Intelligent Systems ROBIN, UiO Robot Engineer, Norsk Titanium Components Chairman, Robotica Osloensis
Robotstudio Offline Visual Programming & Simulation Tool Akbar F. Moghaddam (Shahab) M.Sc. Of Robotics & Intelligent Systems ROBIN, UiO Robot Engineer, Norsk Titanium Components Chairman, Robotica Osloensis
Computer-Aided Manufacturing
 Computer-Aided Manufacturing Third Edition Tien-Chien Chang, Richard A. Wysk, and Hsu-Pin (Ben) Wang PEARSON Prentice Hall Upper Saddle River, New Jersey 07458 Contents Chapter 1 Introduction to Manufacturing
Computer-Aided Manufacturing Third Edition Tien-Chien Chang, Richard A. Wysk, and Hsu-Pin (Ben) Wang PEARSON Prentice Hall Upper Saddle River, New Jersey 07458 Contents Chapter 1 Introduction to Manufacturing
Waters School Supplies 2014/ st grade
 Waters School Supplies 2014/2015 1 st grade school starts 1 regular backpack, labeled 48 pencils #2 pencils, SHARPENED 1 ream white copy paper 2 box 24 crayons 3 glue sticks 2 box colored pencils 2 erasers
Waters School Supplies 2014/2015 1 st grade school starts 1 regular backpack, labeled 48 pencils #2 pencils, SHARPENED 1 ream white copy paper 2 box 24 crayons 3 glue sticks 2 box colored pencils 2 erasers
Performance and Design of UAVs: Test Aircraft Development
 Performance and Design of UAVs: Test Aircraft Development Xavier Perraudin Herbert J. and Selma W. Bernstein Class of 1945 Internship Report Mechanical Engineering and Applied Mechanics University of Pennsylvania
Performance and Design of UAVs: Test Aircraft Development Xavier Perraudin Herbert J. and Selma W. Bernstein Class of 1945 Internship Report Mechanical Engineering and Applied Mechanics University of Pennsylvania
Lab Design of FANUC Robot Operation for Engineering Technology Major Students
 Paper ID #21185 Lab Design of FANUC Robot Operation for Engineering Technology Major Students Dr. Maged Mikhail, Purdue University Northwest Dr. Maged B.Mikhail, Assistant Professor, Mechatronics Engineering
Paper ID #21185 Lab Design of FANUC Robot Operation for Engineering Technology Major Students Dr. Maged Mikhail, Purdue University Northwest Dr. Maged B.Mikhail, Assistant Professor, Mechatronics Engineering
Husky Robotics Team. Information Packet. Introduction
 Husky Robotics Team Information Packet Introduction We are a student robotics team at the University of Washington competing in the University Rover Challenge (URC). To compete, we bring together a team
Husky Robotics Team Information Packet Introduction We are a student robotics team at the University of Washington competing in the University Rover Challenge (URC). To compete, we bring together a team
A Very High Level Interface to Teleoperate a Robot via Web including Augmented Reality
 A Very High Level Interface to Teleoperate a Robot via Web including Augmented Reality R. Marín, P. J. Sanz and J. S. Sánchez Abstract The system consists of a multirobot architecture that gives access
A Very High Level Interface to Teleoperate a Robot via Web including Augmented Reality R. Marín, P. J. Sanz and J. S. Sánchez Abstract The system consists of a multirobot architecture that gives access
Sensors for Automated Assembly
 Home Sensors for Automated Assembly The typical multistation automated assembly system is equipped with myriad sensors. By John Sprovieri June 3, 2014 Assembly machines are dumb. They can only do what
Home Sensors for Automated Assembly The typical multistation automated assembly system is equipped with myriad sensors. By John Sprovieri June 3, 2014 Assembly machines are dumb. They can only do what
Virtual Engineering: Challenges and Solutions for Intuitive Offline Programming for Industrial Robot
 Virtual Engineering: Challenges and Solutions for Intuitive Offline Programming for Industrial Robot Liwei Qi, Xingguo Yin, Haipeng Wang, Li Tao ABB Corporate Research China No. 31 Fu Te Dong San Rd.,
Virtual Engineering: Challenges and Solutions for Intuitive Offline Programming for Industrial Robot Liwei Qi, Xingguo Yin, Haipeng Wang, Li Tao ABB Corporate Research China No. 31 Fu Te Dong San Rd.,
Subject Description Form. Industrial Centre Training I for EIE. Upon completion of the subject, students will be able to:
 Subject Description Form Subject Code Subject Title Credit Value IC2114 Industrial Centre Training I for EIE 5 training credits Level 2 Pre-requisite/ Co-requisite/ Exclusion Objectives Intended Subject
Subject Description Form Subject Code Subject Title Credit Value IC2114 Industrial Centre Training I for EIE 5 training credits Level 2 Pre-requisite/ Co-requisite/ Exclusion Objectives Intended Subject
Sample VA Technical Documentation Assessments
 Sample 243-251-VA Technical Documentation Assessments EVALUATION OF ASSESSMENT TOOLS USED TO MEASURE ACHIEVEMENT OF IET COURSE COMPETENCIES Please attach copies of all assessment tools used in this section
Sample 243-251-VA Technical Documentation Assessments EVALUATION OF ASSESSMENT TOOLS USED TO MEASURE ACHIEVEMENT OF IET COURSE COMPETENCIES Please attach copies of all assessment tools used in this section
Spring 06 Assignment 2: Constraint Satisfaction Problems
 15-381 Spring 06 Assignment 2: Constraint Satisfaction Problems Questions to Vaibhav Mehta(vaibhav@cs.cmu.edu) Out: 2/07/06 Due: 2/21/06 Name: Andrew ID: Please turn in your answers on this assignment
15-381 Spring 06 Assignment 2: Constraint Satisfaction Problems Questions to Vaibhav Mehta(vaibhav@cs.cmu.edu) Out: 2/07/06 Due: 2/21/06 Name: Andrew ID: Please turn in your answers on this assignment
Introduction to Robotics Rubrics
 Introduction to Robotics Rubrics Students can evaluate their project work according to the learning goals. Each rubric includes four levels: Bronze, Silver, Gold, and Platinum. The intention is to help
Introduction to Robotics Rubrics Students can evaluate their project work according to the learning goals. Each rubric includes four levels: Bronze, Silver, Gold, and Platinum. The intention is to help
Rockets, Robots, Hovercraft, and Quadracopters, all for the STEM of IT! John J. Helferty Temple University
 Rockets, Robots, Hovercraft, and Quadracopters, all for the STEM of IT! John J. Helferty Temple University OUTLINE Student Space Exploration and Embedded Systems Lab Recent History of Projects New Introduction
Rockets, Robots, Hovercraft, and Quadracopters, all for the STEM of IT! John J. Helferty Temple University OUTLINE Student Space Exploration and Embedded Systems Lab Recent History of Projects New Introduction
Team Number ECE-10. Solar Power Forecasting Tool
 USER MANUAL Team Number ECE-10 Solar Power Forecasting Tool Team Members Name Department Email Kim Nguyen ECE kn383@drexel.edu Kara Ogawa ECE kao73@drexel.edu Stephan Tang ECE st643@drexel.edu Team Advisor
USER MANUAL Team Number ECE-10 Solar Power Forecasting Tool Team Members Name Department Email Kim Nguyen ECE kn383@drexel.edu Kara Ogawa ECE kao73@drexel.edu Stephan Tang ECE st643@drexel.edu Team Advisor
Inspiring Creative Fun Ysbrydoledig Creadigol Hwyl. S4A - Scratch for Arduino Workbook
 Inspiring Creative Fun Ysbrydoledig Creadigol Hwyl S4A - Scratch for Arduino Workbook 1) Robotics Draw a robot. Consider the following and annotate: What will it look like? What will it do? How will you
Inspiring Creative Fun Ysbrydoledig Creadigol Hwyl S4A - Scratch for Arduino Workbook 1) Robotics Draw a robot. Consider the following and annotate: What will it look like? What will it do? How will you
Part 1. Using LabVIEW to Measure Current
 NAME EET 2259 Lab 11 Studying Characteristic Curves with LabVIEW OBJECTIVES -Use LabVIEW to measure DC current. -Write LabVIEW programs to display the characteristic curves of resistors, diodes, and transistors
NAME EET 2259 Lab 11 Studying Characteristic Curves with LabVIEW OBJECTIVES -Use LabVIEW to measure DC current. -Write LabVIEW programs to display the characteristic curves of resistors, diodes, and transistors
MathWorks Announces Built-in Simulink Support for Arduino, BeagleBoard, and LEGO MINDSTORMS NXT
 MathWorks Announces Built-in Simulink Support for Arduino, BeagleBoard, and LEGO MINDSTORMS NXT With one click, engineers run Simulink control system and signal processing algorithms in hardware http://www.mathworks.com/company/newsroom/mathworks-announces-built-in-simulink-
MathWorks Announces Built-in Simulink Support for Arduino, BeagleBoard, and LEGO MINDSTORMS NXT With one click, engineers run Simulink control system and signal processing algorithms in hardware http://www.mathworks.com/company/newsroom/mathworks-announces-built-in-simulink-
Training Schedule. Robotic System Design using Arduino Platform
 Training Schedule Robotic System Design using Arduino Platform Session - 1 Embedded System Design Basics : Scope : To introduce Embedded Systems hardware design fundamentals to students. Processor Selection
Training Schedule Robotic System Design using Arduino Platform Session - 1 Embedded System Design Basics : Scope : To introduce Embedded Systems hardware design fundamentals to students. Processor Selection
École Dansereau Meadows School Supply List Kindergarten
 Supply List Kindergarten Please ensure that you label all your child s items. 1 Set of spare clothing to keep at school (shirt, pants, underpants, socks) big enough to fit a 9X12 envelope 1 Lunch Bag for
Supply List Kindergarten Please ensure that you label all your child s items. 1 Set of spare clothing to keep at school (shirt, pants, underpants, socks) big enough to fit a 9X12 envelope 1 Lunch Bag for
STEM SUMMER CAMPS Camp Guide Cover
 STEM SUMMER CAMPS 2017 Camp Guide Cover Mindframe Education Creating Tomorrow s Leaders Contact Information STEM Summer Camp Information Mindframe Education is an innovative learning center, with a focus
STEM SUMMER CAMPS 2017 Camp Guide Cover Mindframe Education Creating Tomorrow s Leaders Contact Information STEM Summer Camp Information Mindframe Education is an innovative learning center, with a focus
Gael Force FRC Team 126
 Gael Force FRC Team 126 2018 FIRST Robotics Competition 2018 Robot Information and Specs Judges Information Packet Gael Force is proof that one team from a small town can have an incredible impact on many
Gael Force FRC Team 126 2018 FIRST Robotics Competition 2018 Robot Information and Specs Judges Information Packet Gael Force is proof that one team from a small town can have an incredible impact on many
THE ARDUINO ENGINEERING KIT INFORMATION GUIDE ARDUINO.CC/EDUCATION
 THE ARDUINO ENGINEERING KIT INFORMATION GUIDE ARDUINO.CC/EDUCATION Includes 1-year individual user license of: In collaboration with: INSPIRING TEACHING & EMPOWERING TABLE OF CONTENTS ARDUINO EDUCATION
THE ARDUINO ENGINEERING KIT INFORMATION GUIDE ARDUINO.CC/EDUCATION Includes 1-year individual user license of: In collaboration with: INSPIRING TEACHING & EMPOWERING TABLE OF CONTENTS ARDUINO EDUCATION
Collaborative Robots and the factory of the future. Nicolas De Keijser Assembly & Test Business Line Manager, USA
 2018-09-26 Collaborative Robots and the factory of the future Nicolas De Keijser Assembly & Test Business Line Manager, USA Strong Growth for Collaborative Robots Forecasted October 1, 2018 Slide 2 ABB
2018-09-26 Collaborative Robots and the factory of the future Nicolas De Keijser Assembly & Test Business Line Manager, USA Strong Growth for Collaborative Robots Forecasted October 1, 2018 Slide 2 ABB
Studio 2 - Pneumatic Launcher
 GEORGIA INSTITUTE OF TECHNOLOGY George W. Woodruff School of Mechanical Engineering ME 2110 Creative Decisions and Design Summer 2010 Studio 2 - Pneumatic Launcher In order to successfully design and build
GEORGIA INSTITUTE OF TECHNOLOGY George W. Woodruff School of Mechanical Engineering ME 2110 Creative Decisions and Design Summer 2010 Studio 2 - Pneumatic Launcher In order to successfully design and build
Development of a Finger Mounted Type Haptic Device Using a Plane Approximated to Tangent Plane
 Journal of Communication and Computer 13 (2016) 329-337 doi:10.17265/1548-7709/2016.07.002 D DAVID PUBLISHING Development of a Finger Mounted Type Haptic Device Using a Plane Approximated to Tangent Plane
Journal of Communication and Computer 13 (2016) 329-337 doi:10.17265/1548-7709/2016.07.002 D DAVID PUBLISHING Development of a Finger Mounted Type Haptic Device Using a Plane Approximated to Tangent Plane
JPF Welding Automation
 JPF Welding Automation ECE 1808 / ME 30 EE: Thomas Bacon, Brittany Bohn, Timothy Jorz, Ivan Paz ME: Nathan Baker, Ronnie Fierro Faculty Advisor: Ashwin Dani Industry Sponsor: Mr. Scott Carlson Summary
JPF Welding Automation ECE 1808 / ME 30 EE: Thomas Bacon, Brittany Bohn, Timothy Jorz, Ivan Paz ME: Nathan Baker, Ronnie Fierro Faculty Advisor: Ashwin Dani Industry Sponsor: Mr. Scott Carlson Summary
GUJARAT TECHNOLOGICAL UNIVERSITY
 Type of course: Core GUJARAT TECHNOLOGICAL UNIVERSITY BRANCH: Mechanical/Production/Manufacturing Engineering SUBJECT NAME: Computer Aided Manufacturing SUBJECT CODE: 2171903 BE Semester VII Prerequisite:
Type of course: Core GUJARAT TECHNOLOGICAL UNIVERSITY BRANCH: Mechanical/Production/Manufacturing Engineering SUBJECT NAME: Computer Aided Manufacturing SUBJECT CODE: 2171903 BE Semester VII Prerequisite:
Portfolio. Swaroop Kumar Pal swarooppal.wordpress.com github.com/swarooppal1088
 Portfolio About Me: I am a Computer Science graduate student at The University of Texas at Dallas. I am currently working as Augmented Reality Engineer at Aireal, Dallas and also as a Graduate Researcher
Portfolio About Me: I am a Computer Science graduate student at The University of Texas at Dallas. I am currently working as Augmented Reality Engineer at Aireal, Dallas and also as a Graduate Researcher
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute Use an example to explain what is admittance control? You may refer to exoskeleton
Game Design 1. Week 1: September 6, Beginnings. Fall 2016 Tuesdays & Thursdays 9:30 AM-12:15 PM
 Week 1: September 6, 2016 Game Design 1 Beginnings Fall 2016 Tuesdays & Thursdays 9:30 AM-12:15 PM Instructor: Naomi Clark nmc5@nyu.edu / naomi@halfrobot.com Teaching Assistant: Zach Barash zb450@nyu.edu
Week 1: September 6, 2016 Game Design 1 Beginnings Fall 2016 Tuesdays & Thursdays 9:30 AM-12:15 PM Instructor: Naomi Clark nmc5@nyu.edu / naomi@halfrobot.com Teaching Assistant: Zach Barash zb450@nyu.edu
Physics 131 Lab 1: ONE-DIMENSIONAL MOTION
 1 Name Date Partner(s) Physics 131 Lab 1: ONE-DIMENSIONAL MOTION OBJECTIVES To familiarize yourself with motion detector hardware. To explore how simple motions are represented on a displacement-time graph.
1 Name Date Partner(s) Physics 131 Lab 1: ONE-DIMENSIONAL MOTION OBJECTIVES To familiarize yourself with motion detector hardware. To explore how simple motions are represented on a displacement-time graph.
Academia Box. 6-axis robot training cell Robotics Academy
 Academia Box 6-axis robot training cell Robotics Academy The perfect introduction to the fascinating world of robotics The automation boom has continued unabated for many years now, and robots are becoming
Academia Box 6-axis robot training cell Robotics Academy The perfect introduction to the fascinating world of robotics The automation boom has continued unabated for many years now, and robots are becoming
On-demand printable robots
 On-demand printable robots Ankur Mehta Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology 3 Computational problem? 4 Physical problem? There s a robot for that.
On-demand printable robots Ankur Mehta Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology 3 Computational problem? 4 Physical problem? There s a robot for that.
Taffy Tangle. cpsc 231 assignment #5. Due Dates
 cpsc 231 assignment #5 Taffy Tangle If you ve ever played casual games on your mobile device, or even on the internet through your browser, chances are that you ve spent some time with a match three game.
cpsc 231 assignment #5 Taffy Tangle If you ve ever played casual games on your mobile device, or even on the internet through your browser, chances are that you ve spent some time with a match three game.
Date Issued: 12/13/2016 iarmc.06: Draft 6. TEAM 1 - iarm CONTROLLER FUNCTIONAL REQUIREMENTS
 Date Issued: 12/13/2016 iarmc.06: Draft 6 TEAM 1 - iarm CONTROLLER FUNCTIONAL REQUIREMENTS 1 Purpose This document presents the functional requirements for an accompanying controller to maneuver the Intelligent
Date Issued: 12/13/2016 iarmc.06: Draft 6 TEAM 1 - iarm CONTROLLER FUNCTIONAL REQUIREMENTS 1 Purpose This document presents the functional requirements for an accompanying controller to maneuver the Intelligent
Search and Rescue Maze. Robotics Instructor: Ms. Sicola
 Search and Rescue Maze Robotics 2015-2016 Instructor: Ms. Sicola Research and Gather Information Research and Gather Information Each team member will create a Google slides presentation on a manufactured
Search and Rescue Maze Robotics 2015-2016 Instructor: Ms. Sicola Research and Gather Information Research and Gather Information Each team member will create a Google slides presentation on a manufactured
2012 Mechatronics Competition: Capture the Flag
 2012 Mechatronics Competition: Capture the Flag Overview The mechatronics competition will be a capture the flag game between two alliances of three robots each. The goal is to be the first alliance to
2012 Mechatronics Competition: Capture the Flag Overview The mechatronics competition will be a capture the flag game between two alliances of three robots each. The goal is to be the first alliance to
Vision Ques t. Vision Quest. Use the Vision Sensor to drive your robot in Vision Quest!
 Vision Ques t Vision Quest Use the Vision Sensor to drive your robot in Vision Quest! Seek Discover new hands-on builds and programming opportunities to further your understanding of a subject matter.
Vision Ques t Vision Quest Use the Vision Sensor to drive your robot in Vision Quest! Seek Discover new hands-on builds and programming opportunities to further your understanding of a subject matter.
75 points D. Homework 50 points E. Critiques 10 point F. Total: 150 points
 Art 202-Intermediate Drawing M: 5:50-10-pm-- 818 364 7735 CAC 1. Office CAI 221 or CAC 1: M, T, Th 4:45-5:45, W: 4:20-5:50, F. 2:10-3:10 Professor Barbara Kerwin: Barbara@barbarakerwin.com This is an intermediate
Art 202-Intermediate Drawing M: 5:50-10-pm-- 818 364 7735 CAC 1. Office CAI 221 or CAC 1: M, T, Th 4:45-5:45, W: 4:20-5:50, F. 2:10-3:10 Professor Barbara Kerwin: Barbara@barbarakerwin.com This is an intermediate
January 11, 2017 Administrative notes
 January 11, 2017 Administrative notes Clickers Updated on Canvas as of people registered yesterday night. REEF/iClicker mobile is not working for everyone. Use at your own risk. If you are having trouble
January 11, 2017 Administrative notes Clickers Updated on Canvas as of people registered yesterday night. REEF/iClicker mobile is not working for everyone. Use at your own risk. If you are having trouble
CSE 3401 Assignment 4 Winter Date out: March 26. Date due: April 6, at 11:55 pm
 CSE 3401 Assignment 4 Winter 2013 Date out: March 26. Date due: April 6, at 11:55 pm The submitted assignment must be based on your individual work. Review the Academic Honesty Guidelines for more details.
CSE 3401 Assignment 4 Winter 2013 Date out: March 26. Date due: April 6, at 11:55 pm The submitted assignment must be based on your individual work. Review the Academic Honesty Guidelines for more details.
Is your next colleague a cobot?
 Is your next colleague a cobot? Technifutur 29 November 2016 30.11.16 1 Agenda Main features Cobots vs industrial robots Add-ons Trends Case assessment Demonstrator 30.11.16 2 What s in a name? "Collaborative
Is your next colleague a cobot? Technifutur 29 November 2016 30.11.16 1 Agenda Main features Cobots vs industrial robots Add-ons Trends Case assessment Demonstrator 30.11.16 2 What s in a name? "Collaborative
Virtual Reality Mobile 360 Nanodegree Syllabus (nd106)
") Virtual Reality Mobile 360 Nanodegree Syllabus (nd106) Join the Creative Revolution Before You Start Thank you for your interest in the Virtual Reality Nanodegree program! In order to succeed in this program,
Virtual Reality Mobile 360 Nanodegree Syllabus (nd106) Join the Creative Revolution Before You Start Thank you for your interest in the Virtual Reality Nanodegree program! In order to succeed in this program,
John Henry Foster INTRODUCING OUR NEW ROBOTICS LINE. Imagine Your Business...better. Automate Virtually Anything jhfoster.
 John Henry Foster INTRODUCING OUR NEW ROBOTICS LINE Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 What if you could automate the repetitive manual
John Henry Foster INTRODUCING OUR NEW ROBOTICS LINE Imagine Your Business...better. Automate Virtually Anything 800.582.5162 John Henry Foster 800.582.5162 What if you could automate the repetitive manual
Spring 06 Assignment 2: Constraint Satisfaction Problems
 15-381 Spring 06 Assignment 2: Constraint Satisfaction Problems Questions to Vaibhav Mehta(vaibhav@cs.cmu.edu) Out: 2/07/06 Due: 2/21/06 Name: Andrew ID: Please turn in your answers on this assignment
15-381 Spring 06 Assignment 2: Constraint Satisfaction Problems Questions to Vaibhav Mehta(vaibhav@cs.cmu.edu) Out: 2/07/06 Due: 2/21/06 Name: Andrew ID: Please turn in your answers on this assignment
Robotic Polishing of Streamline Co-Extrusion Die: A Case Study
 Proceedings of the 2017 International Conference on Industrial Engineering and Operations Management (IEOM) Bristol, UK, July 24-25, 2017 Robotic Polishing of Streamline Co-Extrusion Die: A Case Study
Proceedings of the 2017 International Conference on Industrial Engineering and Operations Management (IEOM) Bristol, UK, July 24-25, 2017 Robotic Polishing of Streamline Co-Extrusion Die: A Case Study
OFFICE OF CURRICULUM AND INSTRUCTION
 Rising 2 nd Grade OFFICE OF CURRICULUM AND INSTRUCTION 1325 Lower Ferry Rd, Ewing NJ 08618 Don Wahlers, District Supervisor for Curriculum & Instruction Phone 609-538-9800 Ext. 3148 Fax 609-882-8172 S.T.E.M.
Rising 2 nd Grade OFFICE OF CURRICULUM AND INSTRUCTION 1325 Lower Ferry Rd, Ewing NJ 08618 Don Wahlers, District Supervisor for Curriculum & Instruction Phone 609-538-9800 Ext. 3148 Fax 609-882-8172 S.T.E.M.
Game Variations: Ultimate Tic Tac Toe
 Game Variations: Ultimate Tic Tac Toe Middle School In this lesson, students will experience the engineering process when creating modifications to a familiar game. Next Generation Science Standards MS-ETS1-1
Game Variations: Ultimate Tic Tac Toe Middle School In this lesson, students will experience the engineering process when creating modifications to a familiar game. Next Generation Science Standards MS-ETS1-1
Teaching Critical Skills in Robotics Automation: ir-vision 2D Course in Robotic Vision Systems Development and Implementation
 Teaching Critical Skills in Robotics Automation: ir-vision 2D Course in Robotic Vision Systems Development and Implementation Aleksandr Sergeyev EET, Michigan Tech avsergue@mtu.edu Siddharth Parmar ME,
Teaching Critical Skills in Robotics Automation: ir-vision 2D Course in Robotic Vision Systems Development and Implementation Aleksandr Sergeyev EET, Michigan Tech avsergue@mtu.edu Siddharth Parmar ME,
Exercise 2. Point-to-Point Programs EXERCISE OBJECTIVE
 Exercise 2 Point-to-Point Programs EXERCISE OBJECTIVE In this exercise, you will learn various important terms used in the robotics field. You will also be introduced to position and control points, and
Exercise 2 Point-to-Point Programs EXERCISE OBJECTIVE In this exercise, you will learn various important terms used in the robotics field. You will also be introduced to position and control points, and
Spelling Homework *13. *14. My Spelling Words. Name: Week of:
 1 Have a parent scramble your spelling You unscramble them. Ex: arfm = farm Get a timer. Set it for 3 minutes. See how many words you can write before the timer goes off. Visit http://gradespelling.com/journeysreading-program-k-6-interactiveonline-supplement/
1 Have a parent scramble your spelling You unscramble them. Ex: arfm = farm Get a timer. Set it for 3 minutes. See how many words you can write before the timer goes off. Visit http://gradespelling.com/journeysreading-program-k-6-interactiveonline-supplement/
ABE 591Y Instrumentation and Data Acquisition Autumn 2005
 ABE 591Y Instrumentation and Data Acquisition Autumn 2005 Warning: Contents may change. Check at least weekly! Instructor: Keith Cherkauer, ABE Rm 312, Phone: 49-67982 Office hours: Mon and Wed 1:00 pm
ABE 591Y Instrumentation and Data Acquisition Autumn 2005 Warning: Contents may change. Check at least weekly! Instructor: Keith Cherkauer, ABE Rm 312, Phone: 49-67982 Office hours: Mon and Wed 1:00 pm
4/9/2015. Simple Graphics and Image Processing. Simple Graphics. Overview of Turtle Graphics (continued) Overview of Turtle Graphics
 Overview of Turtle Graphics") Simple Graphics and Image Processing The Plan For Today Website Updates Intro to Python Quiz Corrections Missing Assignments Graphics and Images Simple Graphics Turtle Graphics Image Processing Assignment
Simple Graphics and Image Processing The Plan For Today Website Updates Intro to Python Quiz Corrections Missing Assignments Graphics and Images Simple Graphics Turtle Graphics Image Processing Assignment
Control Robotics Arm with EduCake
 Control Robotics Arm with EduCake 1. About Robotics Arm Robotics Arm (RobotArm) similar to the one in Figure-1, is used in broad range of industrial automation and manufacturing environment. This type
Control Robotics Arm with EduCake 1. About Robotics Arm Robotics Arm (RobotArm) similar to the one in Figure-1, is used in broad range of industrial automation and manufacturing environment. This type
Workshop IROS 2015 Robotic co-workers methods, challenges and industrial test cases
 Björn Matthias, ABB Corporate Research, 2015-09-28 New safety standards for collaborative robots, ABB YuMi dual-arm robot Workshop IROS 2015 Robotic co-workers methods, challenges and industrial test cases
Björn Matthias, ABB Corporate Research, 2015-09-28 New safety standards for collaborative robots, ABB YuMi dual-arm robot Workshop IROS 2015 Robotic co-workers methods, challenges and industrial test cases
Nagoya International School Parent Guide to Design
 Nagoya International School Parent Guide to Design Design is the fundamental soul of a man-made creation that ends up expressing itself in successive outer layers of a product or service. Steve Jobs Design
Nagoya International School Parent Guide to Design Design is the fundamental soul of a man-made creation that ends up expressing itself in successive outer layers of a product or service. Steve Jobs Design