ESA GNC Technologies and Test Beds for ADR and Space Tug Applications
|
|
|
- Ariel Holt
- 5 years ago
- Views:
Transcription


1 ESA GNC Technologies and Test Beds for ADR and Space Tug Applications G. Ortega GNC Section of ESA Clean Space Industrial Days October 2017 ESA UNCLASSIFIED - For Official Use 1








2 Guidance, Navigation, and Control establishment of the desired path to follow establishment of the current and future state actions to match the current state (navigation) with the foreseen path (guidance) G N C DKE 2
 Support to the")
 Surrounding software used to initialise, launch, monitor, and store GNC simulations P3?")

3 Products from GNC Systems Engineering Life Cycle Two main products are obtained out of the complete GNC engineering process P1: GNC hardware configuration Procurement of sensors set, positioning and mounting in the spacecraft, interconnection (sensors are considered part of the GNC subsystem) Support to the procurement, placement, and interconnection of the actuators (actuators are not considered part of the GNC subsystem) P2: GNC framework The GNC simulation tools (MIL, SIL, PIL, HIL expressions) Surrounding software used to initialise, launch, monitor, and store GNC simulations P3?: More and more often, the on-board software is now automatically derived from the GNC framework (auto-coding). On-board SW could also be a product of the GNC, depending on the mission The cost of the complete process in a project may represent between 15% to 30% of the total cost of the project The GNC cost for Small Body missions is higher that average 3
 Phase 2 e.")
4 GNC in Clean Space CleanSAT (de-orbiting systems) and e.deorbit (graveyarding ENVISAT) Very complex GNC with a launch in 2023 Phase 1 e.deorbit Delta B1 To close the open trade-offs following Consolidation Develop the system design in order to complete the Systems Requirement Review (SRR) Phase 2 e.deorbit Phase B2 Consolidate the preliminary design of the chaser and payload Elaborate on the definition of the critical subsystems such as GNC, Robotics and Communications Develop the system design in order to complete the Preliminary Design Review (PDR) CM-16 CM Q3 Q4 Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4 Q1 Q2 Q3 Q4 Consolidation B2 C E Technology Dev. D SRR PDR CDR Launch 4












5 GNC for on-orbit servicing Serv icing v eh icles 0.7 mm 2.8 arcsec 600 arcsec PROBA -3 C one Xpress A R P- K ST S -8 0 Co l u m b ia ST S -8 4 A t la n t i s ST S -8 6 Co l u m b ia re n dezv ous i n GE O for on or bit ser vi ci ng Groun d va lida ti on of on -or bit ser vi ci ng ATV-1 ATV-2 ATV-3 ATV-4 ATV-5 Demo of f ormation f lying in high ellipti cal orbi t e.d eor bit ins pect ion, ren dezv ous and captu re of EN VI SAT with th e pur pose of de-orbit ing it SSV an d si milar v eh icles based on low thr ust propuls ion R en dez vou s i n GE O wit h I S S la rge s cal e te stin g fa cil it ies in Ge rm an y

 The VAC study provided a definition of a versatile concept, e.g.")
.")


6 ESA studies of on-orbit servicing with GNC ConeXpress ( ) The ConeXpress Orbital Life Extension Vehicle (CX-OLEV) was proposed extend the lives of large geostationary satellites for up to 12 years beyond their original product- ive lives. It can also recover satellites launched into incorrect orbits, move them along the orbital arc, or manoeuvre them into to a disposal orbit. ConeXpress is a wholly European initiative and it is the only commercial on-orbit servicing project in advanced development. Versatile Autonomous Concept VAC ( ) The VAC study provided a definition of a versatile concept, e.g. a set of ATV-derived vehicle modules that can be fully or partially assembled together, to satisfy the need of a large set of future Human Spaceflight and Exploration mission scenarios. The study also explored commonalities and complementarities of the modules above with the Service Module for NASA s MPCV (MPCV-ESM). The mission scenarios studied were 1 Space Tugs for LEO Operations, 2 Resource Modules for Free Flyers, and 3 Transportation System for Exploration. The Space Tug class included Station servicing missions, De-orbiting missions, and Technology demonstration missions. The Free Flyer class included also three missions: Resource Module for an Infrastructure based Free Flyer, Resource Module for Autonomous Free Flyer in LEO, and Resource Module for Autonomous Free Flyer in Deep Space. The Transportation class included Propulsion Modules only. ATV evolution for debris removal (2011) This ESA study targeted an ATV derived orbital debris removal system as multiple mission spacecraft, with the elimination of a series of large debris, and a strategy of orbital transfers in-between. Once the ATV derived vehicle has performed rendezvous with the target, it delivers a capture and disposal package, and proceeds to the next target. The number of targets per mission depends on the characteristics (mass, volume) of the capture and disposal package as well as the delta-v budget of the multiple target mission. The feasibility was stemming from the cost per removal (Ariane, ATV derived, disposal package, operations), the accessibility of targets, technically, legally and politically, the availability of a customer (agencies, nations, private sector) and the mission scenario feasibility. Rendezvous and Refuelling Demonstrator (R2D3) (2010) This R2D3 study centred on the design of a spacecraft able to perform RDV and Refuelling demonstration. A second objective was the development of a low-mass interplanetary carrier with high-payload mass fraction. Two other objectives were the validation of an optical communication terminal and the investigation of the debris removal. For the refuelling demonstration, various propellants were considered including liquid (storable, cryogenic), gaseous (xenon, nitrogen), solid and hybrid. For the liquid the study considered mon and bi-propellants (hydrazine, green, MON, MMH, N2O4, LH2, LOX, CH4). 6
7 GNC technologies for ADR and Space Tug GNC technology G N DKE C 01) Trajectory guidance 02) Rendezvous and close approach guidance 03) Target acquisition and identification 04) Image processing for navigation 05) Estimation and data fusion for navigation 06) Environment modelling 07) Vehicle design and knowledge 08) Optimal and robust control 09) Failure detection, isolation, and recovery MVM HMS FDIR Others 01) Mode transtions 02) Safe and failure modes 03) Health monitoring 04) Integrity breach monitoring 05) Failure detection and isolation 06) Recovery 10) GNC testing facilities 7

8 Model-base GNC design and development Model based design approach and auto-coding Modeling of GNC algorithms as well as equipment, dynamics and environment Tools features allowing straightforward frequency analysis and time simulation GNC SW code and verification activities largely automated 8
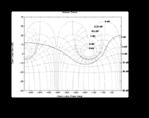
9 Guidance for terminal rendezvous Passively safe orbits Approach along target angular momentum and synchronization close to capture point Optimized approach and synchronization 9
 with pulse width, pulse frequency modulation (PWPF).")

10 Combined control satellite+robot Loop shaping H-infinity combined control of satellite chaser and robotic arm Comparison with Linear Parameter Variant LPV controller using LFT modelling Satellite based on e.deorbit specifications: Dimensions: 1,45 x 1,6 x 2.2 m, Weight ~1.5 t 24 control thrusters (22 N) with pulse width, pulse frequency modulation (PWPF). Force allocation on individual thrusters. Optimisation based using CLS. Additional 4 x 220 N and 2 x 425 N thrusters Tanks for oxidiser and fuel with sloshing modelling Robotic manipulator arm with 7 degrees of freedom DLR-RM ROKVISS joint design, Robot arm components as multi-body systems. Large reach and low weight and modelling of joint friction and gear elasticity. Full consideration of dynamic coupling forces and torques on satellite (reaction forces) and gripper implemented as force element Number of states remains constant during simulation (allows simulation of different phases with same setup, number must not change for Modelica simulation). Baumgarte stabilisation for numerical robustness 10
, infrared cameras, multi-spectral, altimeters, LIDAR, IMU, STR Image")

11 Navigation building blocks Target acquisition and identification: vision-based cameras (wide and narrow fields of view), infrared cameras, multi-spectral, altimeters, LIDAR, IMU, STR Image processing for navigation: feature Extraction and image correlation, optical flow Estimation and data fusion for navigation: sensor data fusion, deterministic and stochastic filtering, Kalman 11

 Development of sensor level critical technology, and the breadboard model")


 and TIR (thermal infrared) solution Focus on")
12 Some GNC sensors: Altimeter and Multi-spectral camera Altimeter Multi-spectral camera A direct and reliable measurement of the ground distance by a terrain sensor is a key asset for any planetary descent and landing system that allows the triggering of key events of the entry, descent and landing sequence (EDL) Development of sensor level critical technology, and the breadboard model of a planetary altimeter Two technologies: radar and laser Reduce the mass, size, and power of its individual components Use of the combination of visible, IR, and UV wavelengths for navigation sensing Review existing space-qualified detectors technology which could be used for such purpose and their response in the identified spectral bands. Architecture and a preliminary design of a Multispectral Sensing Device called HyperNAV Selection of a combined VNIR (visible and near infrared) and TIR (thermal infrared) solution Focus on rendezvous applications (both cooperative and uncooperative) 12
13 Navigation using VISIBLE vs INFRARED wavelengths ENVISAT approach using camera in VISIBLE ENVISAT approach using camera in INFRARED 13
; Features available are craters, boulders and dunes Whole planet and asteroid models are also possible; Viewer to render the surface; Fog / atmospheric dust; Dust devils, Dust kicked off")
14 GNC tools: synthetic scene generation with PANGU Surface modeller: realistic surfaces (MLI, OSR, solar cells ); Generate surface file and shadow maps from scratch or from existing Digital Elevation Maps (DEM); Features available are craters, boulders and dunes Whole planet and asteroid models are also possible; Viewer to render the surface; Fog / atmospheric dust; Dust devils, Dust kicked off by thrusters; Sky colour, stars, Earth, moon visible Rendering of the surface with a shadow map; Dynamic shadows; DEM completion (filling holes, adding craters ); Surface analysis (illumination, boulder coverage ); Rover surface navigation (experimental feature) Asteroid simulation: Fast rendering of surface boulders on asteroid now possible, multiple bodies casting dynamic shadows Virtual Spacecraft Image Generator Tool Import of CAD/3D model 14
15 GNC Verification and Validation for e.deorbit GNC Verification is defined as the process that demonstrates through the provision of objective evidence that the GNC product is designed and produced according to its specifications and the agreed deviations and waivers, and is free of defects. The GNC verification process allows to confirm that adequate specifications and inputs exist for any activity, and that the outputs of the activities are correct and consistent with the specifications and input of a GNC system. GNC Validation is defined as the process which demonstrates that the GNC is able to accomplish its intended use in the intended operational environment. The GNC validation process allows to confirm that the requirements baseline functions and performances are correctly and completely implemented in the final GNC product. GNC Certification is defined as the procedure by which a party gives formal assurance that a GNC system is in compliance with specified requirements. 15

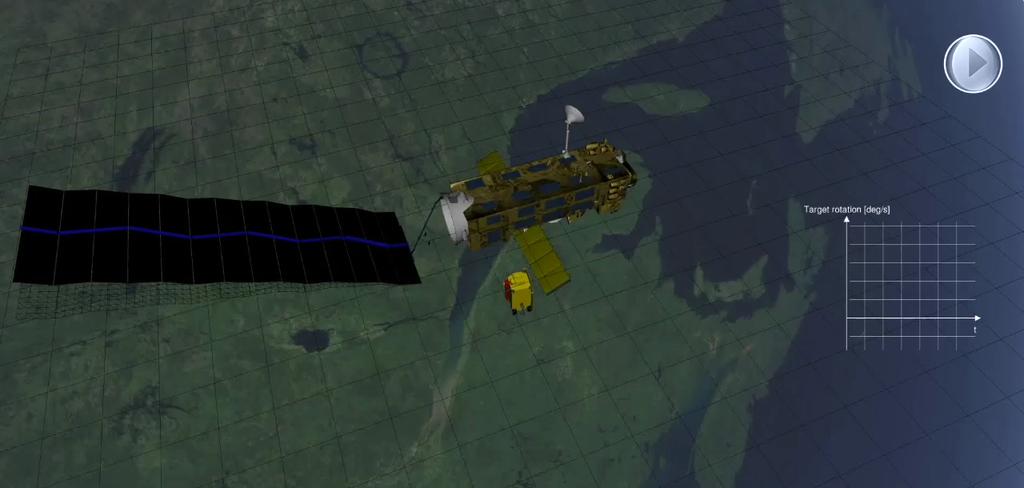
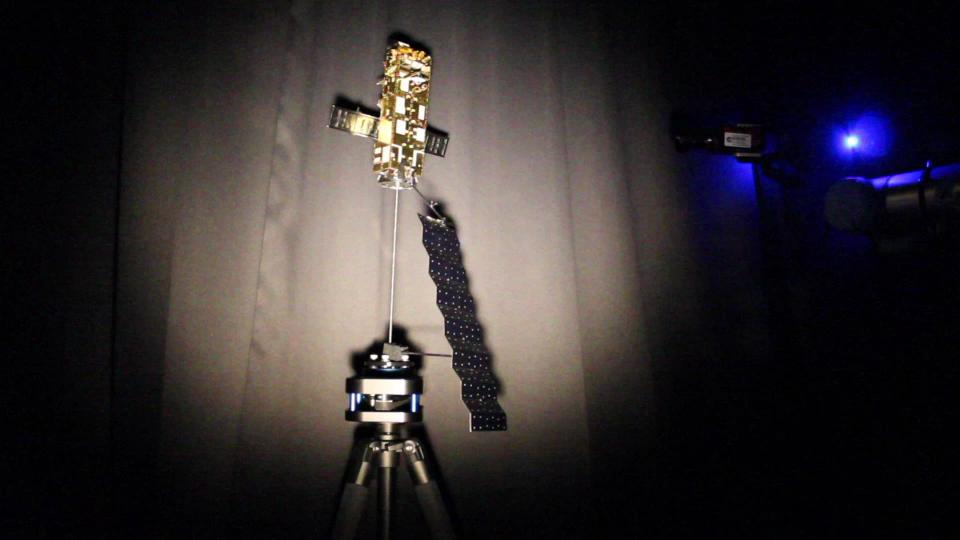
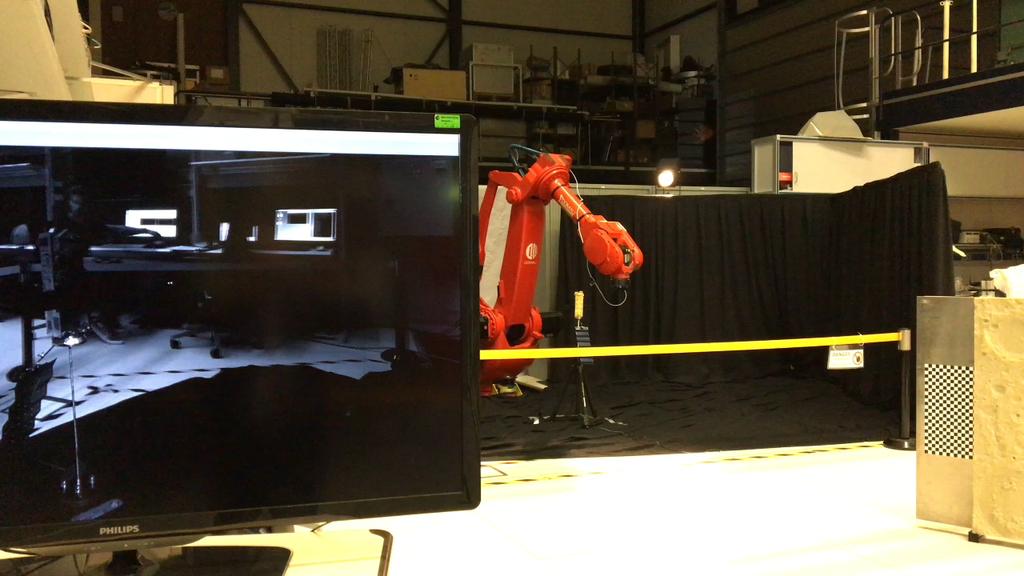
16 On Ground Validation Advance of key technologies required to perform complex robotic scenarios (cooperative and non-cooperative) needing a rigid capture mechanism such as a robotic arm: Image processing chain for relative navigation and robotic arm operation. Chaser vehicle GNC for approach and for close proximity operations. Robotics control Simultaneous operation of two control system i.e. spacecraft GNC and robotic arm Combo system overall modelling/dynamic characterization, requiring multi-body models TRL 5/6 for the vision-based system, including HW (space-heritage optical and processing units have been used) and SW (performant Image Processing algorithms has been coded in VHDL and embedded in the camera processing units, working at 2Hz) TLR 4/5 for the full system (TRL 4/5 at functional level, TRL4 at interfacing level) 16
17

18
19

20 FDIR for generic GNC and AOCS Space missions more and more complex: each mission has a different FDIR/FTC system Lack of regular processes and procedures on how to design, develop, and test FDIR/FTC systems Difficult to qualify FDIR/FTC systems within a reasonable price and time Objective 1: Provision for a consistent approach, common engineering and guidelines of the FDIR/FTC design, development and testing processes Objective 2: Formalisation of concepts, terminology, and vocabulary for the development of FDIR/FTC systems Objective 3: Elaboration of systematic processes for the qualification of FDIR/FTC systems (including verification and validation) Objective 4: Elaboration of operational aspects versus autonomy (on-board / on-ground dichotomy) Ṟ Ṟ Ṟ Selected Configuration SCV_CONFIG Ṟ SCV_NOM Ṟ SCV_SAFE Ṟ SCV_HEALTH Service 8 Switching Functions Setup Unit_on Unit_off SCV Expected Status SCV_Status Ṟ SCV_Pwr Ṟ SCV_TM Ṟ SCV_OP Validities TM(5,1) Nom operation TM(5,3) Non Nominal Operation Service 12 Parameter Monitoring (PMON) Parameters to Monitor TM(5,2) In Limit TM(5,3) OOL Checking State SCV_Health setting TM(5,4) FMON Service 142 Functional Monitoring (FMON) Function calls TM Packets Service 5 Event Service TM(5,x) TM(5,3) Action Service 19 Event Action (EAM) TM(5,3) from TM(3,139) TM(5,3) Snap Events OBCP Reporting_ Events TC(8,1) OBCP Start Command Service 148 Onboard Control Procedures/ Sequences (OBCP/OBCS) Objective 5: Reduction of time and funding of FDIR/FTC systems life-time design, development, and testing System Data Pool (SDP) 20

21 Thanks for your attention ESA UNCLASSIFIED - For Official Use 21
Clean Space. A new cross-cutting initiative of ESA. The Clean Space Team 15/04/2013. ESA UNCLASSIFIED For Official Use
 Clean Space A new cross-cutting initiative of ESA The Clean Space Team 15/04/2013 Index Introduction Clean Space Branch 3 Space debris mitigation Branch 4 Space debris remediation Implementation Conclusions
Clean Space A new cross-cutting initiative of ESA The Clean Space Team 15/04/2013 Index Introduction Clean Space Branch 3 Space debris mitigation Branch 4 Space debris remediation Implementation Conclusions
ESA Developments on GNC Systems for Non-Cooperative Rendezvous
 ESA Developments on GNC Systems for Non-Cooperative Rendezvous Jesus Gil and Guillermo Ortega May 23-27, 2016 Clean Space Industrial Days ESTEC, The Netherlands 1 Table of Contents Introduction Applications
ESA Developments on GNC Systems for Non-Cooperative Rendezvous Jesus Gil and Guillermo Ortega May 23-27, 2016 Clean Space Industrial Days ESTEC, The Netherlands 1 Table of Contents Introduction Applications
End-to-End Simulation and Verification of Rendezvous and Docking/Berthing Systems using Robotics
 Session 9 Special Test End-to-End Simulation and Verification of Rendezvous and Docking/Berthing Systems using Robotics Author(s): H. Benninghoff, F. Rems, M. Gnat, R. Faller, R. Krenn, M. Stelzer, B.
Session 9 Special Test End-to-End Simulation and Verification of Rendezvous and Docking/Berthing Systems using Robotics Author(s): H. Benninghoff, F. Rems, M. Gnat, R. Faller, R. Krenn, M. Stelzer, B.
Model Based AOCS Design and Automatic Flight Code Generation: Experience and Future Development
 ADCSS 2016 October 20, 2016 Model Based AOCS Design and Automatic Flight Code Generation: Experience and Future Development SATELLITE SYSTEMS Per Bodin Head of AOCS Department OHB Sweden Outline Company
ADCSS 2016 October 20, 2016 Model Based AOCS Design and Automatic Flight Code Generation: Experience and Future Development SATELLITE SYSTEMS Per Bodin Head of AOCS Department OHB Sweden Outline Company
Automation & Robotics (A&R) for Space Applications in the German Space Program
 for Space Applications in the German Space Program") B. Sommer, RD-RR 1 Automation & Robotics (A&R) for Space Applications in the German Space Program ASTRA 2002 ESTEC, November 2002 1 2 Current and future application areas Unmanned exploration of the cold
B. Sommer, RD-RR 1 Automation & Robotics (A&R) for Space Applications in the German Space Program ASTRA 2002 ESTEC, November 2002 1 2 Current and future application areas Unmanned exploration of the cold
Office of Chief Technologist - Space Technology Program Dr. Prasun Desai Office of the Chief Technologist May 1, 2012
 Office of Chief Technologist - Space Technology Program Dr. Prasun Desai Office of the Chief Technologist May 1, 2012 O f f i c e o f t h e C h i e f T e c h n o l o g i s t Office of the Chief Technologist
Office of Chief Technologist - Space Technology Program Dr. Prasun Desai Office of the Chief Technologist May 1, 2012 O f f i c e o f t h e C h i e f T e c h n o l o g i s t Office of the Chief Technologist
Robotic Capture and De-Orbit of a Tumbling and Heavy Target from Low Earth Orbit
 www.dlr.de Chart 1 Robotic Capture and De-Orbit of a Tumbling and Heavy Target from Low Earth Orbit Steffen Jaekel, R. Lampariello, G. Panin, M. Sagardia, B. Brunner, O. Porges, and E. Kraemer (1) M. Wieser,
www.dlr.de Chart 1 Robotic Capture and De-Orbit of a Tumbling and Heavy Target from Low Earth Orbit Steffen Jaekel, R. Lampariello, G. Panin, M. Sagardia, B. Brunner, O. Porges, and E. Kraemer (1) M. Wieser,
GNC/AOCS DEVELOPMENT SYSTEM FOR RENDEZ-VOUS AND DOCKING MISSIONS AT SENER, AND ASSOCIATED TEST FACILITIES
 . GNC/AOCS DEVELOPMENT SYSTEM FOR RENDEZ-VOUS AND DOCKING MISSIONS AT SENER, AND ASSOCIATED TEST FACILITIES Gonzalo Saavedra, Antonio Ayuso, Juan Manuel del Cura, Jose Maria Fernandez, Salvador Llorente,
. GNC/AOCS DEVELOPMENT SYSTEM FOR RENDEZ-VOUS AND DOCKING MISSIONS AT SENER, AND ASSOCIATED TEST FACILITIES Gonzalo Saavedra, Antonio Ayuso, Juan Manuel del Cura, Jose Maria Fernandez, Salvador Llorente,
Platform Independent Launch Vehicle Avionics
 Platform Independent Launch Vehicle Avionics Small Satellite Conference Logan, Utah August 5 th, 2014 Company Introduction Founded in 2011 The Co-Founders blend Academia and Commercial Experience ~20 Employees
Platform Independent Launch Vehicle Avionics Small Satellite Conference Logan, Utah August 5 th, 2014 Company Introduction Founded in 2011 The Co-Founders blend Academia and Commercial Experience ~20 Employees
Future technologies for planetary exploration within the European Exploration Envelope Programme at the European Space Agency
 Future technologies for planetary exploration within the European Exploration Envelope Programme at the European Space Agency Jorge Alves, Ludovic Duvet, Sanjay Vijendran Exploration Preparation, Research
Future technologies for planetary exploration within the European Exploration Envelope Programme at the European Space Agency Jorge Alves, Ludovic Duvet, Sanjay Vijendran Exploration Preparation, Research
Integrated Technology Concept for Robotic On-Orbit Servicing Systems
 Integrated Technology Concept for Robotic On-Orbit Servicing Systems Bernd Maediger, Airbus DS GmbH Bremen, Germany Visual-based navigation Manipulation Grasping Non-cooperative target GNC Visual-based
Integrated Technology Concept for Robotic On-Orbit Servicing Systems Bernd Maediger, Airbus DS GmbH Bremen, Germany Visual-based navigation Manipulation Grasping Non-cooperative target GNC Visual-based
The RVS3000 rendezvous and docking sensor technology
 The RVS3000 rendezvous and docking sensor technology ESA Clean Space Industry Days, 23 25 Oct 2018 Hans K. Raue, Sales Director, Jena-Optronik Dr. Sebastian Dochow, Director LIDAR Products, Jena-Optronik
The RVS3000 rendezvous and docking sensor technology ESA Clean Space Industry Days, 23 25 Oct 2018 Hans K. Raue, Sales Director, Jena-Optronik Dr. Sebastian Dochow, Director LIDAR Products, Jena-Optronik
Unmanned on-orbit servicing (OOS), ROKVISS and the TECSAS mission
, ROKVISS and the TECSAS mission") In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 On-Orbit Servicing (OOS), ROKVISS and
In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 On-Orbit Servicing (OOS), ROKVISS and
PLANLAB: A Planetary Environment Surface & Subsurface Emulator Facility
 Mem. S.A.It. Vol. 82, 449 c SAIt 2011 Memorie della PLANLAB: A Planetary Environment Surface & Subsurface Emulator Facility R. Trucco, P. Pognant, and S. Drovandi ALTEC Advanced Logistics Technology Engineering
Mem. S.A.It. Vol. 82, 449 c SAIt 2011 Memorie della PLANLAB: A Planetary Environment Surface & Subsurface Emulator Facility R. Trucco, P. Pognant, and S. Drovandi ALTEC Advanced Logistics Technology Engineering
C. R. Weisbin, R. Easter, G. Rodriguez January 2001
 on Solar System Bodies --Abstract of a Projected Comparative Performance Evaluation Study-- C. R. Weisbin, R. Easter, G. Rodriguez January 2001 Long Range Vision of Surface Scenarios Technology Now 5 Yrs
on Solar System Bodies --Abstract of a Projected Comparative Performance Evaluation Study-- C. R. Weisbin, R. Easter, G. Rodriguez January 2001 Long Range Vision of Surface Scenarios Technology Now 5 Yrs
ESA Human Spaceflight Capability Development and Future Perspectives International Lunar Conference September Toronto, Canada
 ESA Human Spaceflight Capability Development and Future Perspectives International Lunar Conference 2005 19-23 September Toronto, Canada Scott Hovland Head of Systems Unit, System and Strategy Division,
ESA Human Spaceflight Capability Development and Future Perspectives International Lunar Conference 2005 19-23 September Toronto, Canada Scott Hovland Head of Systems Unit, System and Strategy Division,
Design for Removal. Executive Summary Report
 ISSUE : 1 Page : 1/15 Design for Removal Executive Summary Report ESA STUDY CONTRACT REPORT ESA Contract No: 4000116081/15/NL/GL C/as SUBJECT: Design for Removal CONTRACTOR: Thales Alenia Space NAME OF
ISSUE : 1 Page : 1/15 Design for Removal Executive Summary Report ESA STUDY CONTRACT REPORT ESA Contract No: 4000116081/15/NL/GL C/as SUBJECT: Design for Removal CONTRACTOR: Thales Alenia Space NAME OF
Development of the clamping mechanism
 Phase B1 Development of the clamping mechanism for Active Debris Removal missions Agenda Introduction Clamping scenarios Hold-downs Launch Adapter Ring Trade-off Overview of the clamping mechanism Baseline
Phase B1 Development of the clamping mechanism for Active Debris Removal missions Agenda Introduction Clamping scenarios Hold-downs Launch Adapter Ring Trade-off Overview of the clamping mechanism Baseline
THE GNC MEASUREMENT SYSTEM FOR THE AUTOMATED TRANSFER VEHICLE
 THE GNC MEASUREMENT SYSTEM FOR THE AUTOMATED TRANSFER VEHICLE Yohann ROUX (1), Paul DA CUNHA (1) (1 ) EADS Space Transportation, 66 route de Verneuil 78133 Les Mureaux Cedex, France E-mail:Yohann.roux@space.eads.net
THE GNC MEASUREMENT SYSTEM FOR THE AUTOMATED TRANSFER VEHICLE Yohann ROUX (1), Paul DA CUNHA (1) (1 ) EADS Space Transportation, 66 route de Verneuil 78133 Les Mureaux Cedex, France E-mail:Yohann.roux@space.eads.net
Asteroid Redirect Mission and Human Exploration. William H. Gerstenmaier NASA Associate Administrator for Human Exploration and Operations
 Asteroid Redirect Mission and Human Exploration William H. Gerstenmaier NASA Associate Administrator for Human Exploration and Operations Leveraging Capabilities for an Asteroid Mission NASA is aligning
Asteroid Redirect Mission and Human Exploration William H. Gerstenmaier NASA Associate Administrator for Human Exploration and Operations Leveraging Capabilities for an Asteroid Mission NASA is aligning
Miguel A. Aguirre. Introduction to Space. Systems. Design and Synthesis. ) Springer
 Springer") Miguel A. Aguirre Introduction to Space Systems Design and Synthesis ) Springer Contents Foreword Acknowledgments v vii 1 Introduction 1 1.1. Aim of the book 2 1.2. Roles in the architecture definition
Miguel A. Aguirre Introduction to Space Systems Design and Synthesis ) Springer Contents Foreword Acknowledgments v vii 1 Introduction 1 1.1. Aim of the book 2 1.2. Roles in the architecture definition
The Evolution of Nano-Satellite Proximity Operations In-Space Inspection Workshop 2017
 The Evolution of Nano-Satellite Proximity Operations 02-01-2017 In-Space Inspection Workshop 2017 Tyvak Introduction We develop miniaturized custom spacecraft, launch solutions, and aerospace technologies
The Evolution of Nano-Satellite Proximity Operations 02-01-2017 In-Space Inspection Workshop 2017 Tyvak Introduction We develop miniaturized custom spacecraft, launch solutions, and aerospace technologies
Canadian Activities in Intelligent Robotic Systems - An Overview
 In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Canadian Activities in Intelligent Robotic
In Proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Canadian Activities in Intelligent Robotic
Workshop Inputs from F. Guettache (ESA), J.L. Terraillon (ESA)
, J.L. Terraillon (ESA)") Avionics Systems Technology for New Exploration Scenarios 10th ADCSS Avionics Guillermo Ortega (ESA), Johann Bals (DLR), Michele Delpech (CNES) Workshop Inputs from F. Guettache (ESA), J.L. Terraillon
Avionics Systems Technology for New Exploration Scenarios 10th ADCSS Avionics Guillermo Ortega (ESA), Johann Bals (DLR), Michele Delpech (CNES) Workshop Inputs from F. Guettache (ESA), J.L. Terraillon
Dream Chaser for European Utilization (DC 4 EU):
:") 54th European Space Science Committee Plenary Meeting 22-24 November 2017 German Aerospace Centre DLR Obepfaffenhofen, Germany Presenter: Dr. Marco Berg Dream Chaser for European Utilization (DC 4 EU):
54th European Space Science Committee Plenary Meeting 22-24 November 2017 German Aerospace Centre DLR Obepfaffenhofen, Germany Presenter: Dr. Marco Berg Dream Chaser for European Utilization (DC 4 EU):
Constellation Systems Division
 Lunar National Aeronautics and Exploration Space Administration www.nasa.gov Constellation Systems Division Introduction The Constellation Program was formed to achieve the objectives of maintaining American
Lunar National Aeronautics and Exploration Space Administration www.nasa.gov Constellation Systems Division Introduction The Constellation Program was formed to achieve the objectives of maintaining American
ESA PREPARATION FOR HUMAN LUNAR EXPLORATION. Scott Hovland European Space Agency, HME-HFH, ESTEC,
 ESA PREPARATION FOR HUMAN LUNAR EXPLORATION Scott Hovland European Space Agency, HME-HFH, ESTEC, Scott.Hovland@esa.int 1 Aurora Core Programme Outline Main goals of Core Programme: To establish set of
ESA PREPARATION FOR HUMAN LUNAR EXPLORATION Scott Hovland European Space Agency, HME-HFH, ESTEC, Scott.Hovland@esa.int 1 Aurora Core Programme Outline Main goals of Core Programme: To establish set of
Understand that technology has different levels of maturity and that lower maturity levels come with higher risks.
 Technology 1 Agenda Understand that technology has different levels of maturity and that lower maturity levels come with higher risks. Introduce the Technology Readiness Level (TRL) scale used to assess
Technology 1 Agenda Understand that technology has different levels of maturity and that lower maturity levels come with higher risks. Introduce the Technology Readiness Level (TRL) scale used to assess
SPACE. (Some space topics are also listed under Mechatronic topics)
") SPACE (Some space topics are also listed under Mechatronic topics) Dr Xiaofeng Wu Rm N314, Bldg J11; ph. 9036 7053, Xiaofeng.wu@sydney.edu.au Part I SPACE ENGINEERING 1. Vision based satellite formation
SPACE (Some space topics are also listed under Mechatronic topics) Dr Xiaofeng Wu Rm N314, Bldg J11; ph. 9036 7053, Xiaofeng.wu@sydney.edu.au Part I SPACE ENGINEERING 1. Vision based satellite formation
On January 14, 2004, the President announced a new space exploration vision for NASA
 Exploration Conference January 31, 2005 President s Vision for U.S. Space Exploration On January 14, 2004, the President announced a new space exploration vision for NASA Implement a sustained and affordable
Exploration Conference January 31, 2005 President s Vision for U.S. Space Exploration On January 14, 2004, the President announced a new space exploration vision for NASA Implement a sustained and affordable
The International Lunar Network (ILN) and the US Anchor Nodes mission
 and the US Anchor Nodes mission") The International Lunar Network (ILN) and the US Anchor Nodes mission Update to the LEAG/ILWEG/SRR, 10/30/08 Barbara Cohen, SDT Co-chair NASA Marshall Space Flight Center Barbara.A.Cohen@nasa.gov The ILN
The International Lunar Network (ILN) and the US Anchor Nodes mission Update to the LEAG/ILWEG/SRR, 10/30/08 Barbara Cohen, SDT Co-chair NASA Marshall Space Flight Center Barbara.A.Cohen@nasa.gov The ILN
Satellite Testing. Prepared by. A.Kaviyarasu Assistant Professor Department of Aerospace Engineering Madras Institute Of Technology Chromepet, Chennai
 Satellite Testing Prepared by A.Kaviyarasu Assistant Professor Department of Aerospace Engineering Madras Institute Of Technology Chromepet, Chennai @copyright Solar Panel Deployment Test Spacecraft operating
Satellite Testing Prepared by A.Kaviyarasu Assistant Professor Department of Aerospace Engineering Madras Institute Of Technology Chromepet, Chennai @copyright Solar Panel Deployment Test Spacecraft operating
UNCLASSIFIED R-1 ITEM NOMENCLATURE FY 2013 OCO
 Exhibit R-2, RDT&E Budget Item Justification: PB 2013 Air Force DATE: February 2012 BA 3: Advanced Development (ATD) COST ($ in Millions) Program Element 75.103 74.009 64.557-64.557 61.690 67.075 54.973
Exhibit R-2, RDT&E Budget Item Justification: PB 2013 Air Force DATE: February 2012 BA 3: Advanced Development (ATD) COST ($ in Millions) Program Element 75.103 74.009 64.557-64.557 61.690 67.075 54.973
Exploration Systems Research & Technology
 Exploration Systems Research & Technology NASA Institute of Advanced Concepts Fellows Meeting 16 March 2005 Dr. Chris Moore Exploration Systems Mission Directorate NASA Headquarters Nation s Vision for
Exploration Systems Research & Technology NASA Institute of Advanced Concepts Fellows Meeting 16 March 2005 Dr. Chris Moore Exploration Systems Mission Directorate NASA Headquarters Nation s Vision for
Autonomous and Autonomic Systems: With Applications to NASA Intelligent Spacecraft Operations and Exploration Systems
 Walt Truszkowski, Harold L. Hallock, Christopher Rouff, Jay Karlin, James Rash, Mike Hinchey, and Roy Sterritt Autonomous and Autonomic Systems: With Applications to NASA Intelligent Spacecraft Operations
Walt Truszkowski, Harold L. Hallock, Christopher Rouff, Jay Karlin, James Rash, Mike Hinchey, and Roy Sterritt Autonomous and Autonomic Systems: With Applications to NASA Intelligent Spacecraft Operations
CubeSat Proximity Operations Demonstration (CPOD) Mission Update Cal Poly CubeSat Workshop San Luis Obispo, CA
 Mission Update Cal Poly CubeSat Workshop San Luis Obispo, CA") CubeSat Proximity Operations Demonstration (CPOD) Mission Update Cal Poly CubeSat Workshop San Luis Obispo, CA 04-22-2015 Austin Williams VP, Space Vehicles ConOps Overview - Designed to Maximize Mission
CubeSat Proximity Operations Demonstration (CPOD) Mission Update Cal Poly CubeSat Workshop San Luis Obispo, CA 04-22-2015 Austin Williams VP, Space Vehicles ConOps Overview - Designed to Maximize Mission
ARTES Competitiveness & Growth Full Proposal. Requirements for the Content of the Technical Proposal. Part 3B Product Development Plan
 ARTES Competitiveness & Growth Full Proposal Requirements for the Content of the Technical Proposal Part 3B Statement of Applicability and Proposal Submission Requirements Applicable Domain(s) Space Segment
ARTES Competitiveness & Growth Full Proposal Requirements for the Content of the Technical Proposal Part 3B Statement of Applicability and Proposal Submission Requirements Applicable Domain(s) Space Segment
Mission Applications for Space A&R - G.Visentin 1. Automation and Robotics Section (TEC-MMA)
") In the proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Gianfranco Visentin Head, Automation
In the proceedings of the 8th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2004' ESTEC, Noordwijk, The Netherlands, November 2-4, 2004 Gianfranco Visentin Head, Automation
The PROBA Missions Design Capabilities for Autonomous Guidance, Navigation and Control. Jean de Lafontaine President
 The PROBA Missions Design Capabilities for Autonomous Guidance, Navigation and Control Jean de Lafontaine President Overview of NGC NGC International Inc (holding company) NGC Aerospace Ltd Sherbrooke,
The PROBA Missions Design Capabilities for Autonomous Guidance, Navigation and Control Jean de Lafontaine President Overview of NGC NGC International Inc (holding company) NGC Aerospace Ltd Sherbrooke,
Key Areas for Collaboration
 Planetary Robotics & Autonomy - current and future collaborations with China Dr. Yang Gao Head of AI & Autonomy Group Lecturer in Spacecraft Autonomy Surrey Space Centre University of Surrey, United Kingdom
Planetary Robotics & Autonomy - current and future collaborations with China Dr. Yang Gao Head of AI & Autonomy Group Lecturer in Spacecraft Autonomy Surrey Space Centre University of Surrey, United Kingdom
EXPERIENCE OF PARTICIPATION IN INTERNATIONAL SCIENTIFIC AND EDUCATIONAL SPACE PROJECTS BY THE EXAMPLE OF QB50 PROJECT
 EXPERIENCE OF PARTICIPATION IN INTERNATIONAL SCIENTIFIC AND EDUCATIONAL SPACE PROJECTS BY THE EXAMPLE OF QB50 PROJECT Postgraduate student of Inter-University Space Research Department Denis Davydov Samara,
EXPERIENCE OF PARTICIPATION IN INTERNATIONAL SCIENTIFIC AND EDUCATIONAL SPACE PROJECTS BY THE EXAMPLE OF QB50 PROJECT Postgraduate student of Inter-University Space Research Department Denis Davydov Samara,
Status and Outlook for European Exploration Envelope Programme
 Status and Outlook for European Exploration Envelope Programme David Parker and HRE Team ESSC, 23 November 2017 ESA UNCLASSIFIED - For Official Use AGENDA 1. Introduction Exploration goals and discussions
Status and Outlook for European Exploration Envelope Programme David Parker and HRE Team ESSC, 23 November 2017 ESA UNCLASSIFIED - For Official Use AGENDA 1. Introduction Exploration goals and discussions
Human Spaceflight Programmes and Possible Greek Participation
 Human Spaceflight Programmes and Possible Greek Participation By G. Reibaldi, R.Nasca, Directorate of Human Spaeflight European Space Agency Thessaloniki, Greece, December 1st, 2008 HSF-SP/2008.003/GR
Human Spaceflight Programmes and Possible Greek Participation By G. Reibaldi, R.Nasca, Directorate of Human Spaeflight European Space Agency Thessaloniki, Greece, December 1st, 2008 HSF-SP/2008.003/GR
Robotics for Space Exploration Today and Tomorrow. Chris Scolese NASA Associate Administrator March 17, 2010
 Robotics for Space Exploration Today and Tomorrow Chris Scolese NASA Associate Administrator March 17, 2010 The Goal and The Problem Explore planetary surfaces with robotic vehicles Understand the environment
Robotics for Space Exploration Today and Tomorrow Chris Scolese NASA Associate Administrator March 17, 2010 The Goal and The Problem Explore planetary surfaces with robotic vehicles Understand the environment
Technology Capabilities and Gaps Roadmap
 Technology Capabilities and Gaps Roadmap John Dankanich Presented at Small Body Technology Forum January 26, 2011 Introduction This is to serve as an evolving technology development roadmap to allow maximum
Technology Capabilities and Gaps Roadmap John Dankanich Presented at Small Body Technology Forum January 26, 2011 Introduction This is to serve as an evolving technology development roadmap to allow maximum
The Global Exploration Roadmap International Space Exploration Coordination Group (ISECG)
") The Global Exploration Roadmap International Space Exploration Coordination Group (ISECG) Kathy Laurini NASA/Senior Advisor, Exploration & Space Ops Co-Chair/ISECG Exp. Roadmap Working Group FISO Telecon,
The Global Exploration Roadmap International Space Exploration Coordination Group (ISECG) Kathy Laurini NASA/Senior Advisor, Exploration & Space Ops Co-Chair/ISECG Exp. Roadmap Working Group FISO Telecon,
ARL Fall 2017 Meetings
 ARL Fall 2017 Meetings Miguel Nunes Assistant Specialist, Hawaii Institute of Geophysics and Planetology (HIGP) and Hawaii Space Flight Laboratory (HSFL) Autonomous Docking with Small Satellites Overview
ARL Fall 2017 Meetings Miguel Nunes Assistant Specialist, Hawaii Institute of Geophysics and Planetology (HIGP) and Hawaii Space Flight Laboratory (HSFL) Autonomous Docking with Small Satellites Overview
CubeSat Proximity Operations Demonstration (CPOD) Vehicle Avionics and Design
 Vehicle Avionics and Design") CubeSat Proximity Operations Demonstration (CPOD) Vehicle Avionics and Design August CubeSat Workshop 2015 Austin Williams VP, Space Vehicles CPOD: Big Capability in a Small Package Communications ADCS
CubeSat Proximity Operations Demonstration (CPOD) Vehicle Avionics and Design August CubeSat Workshop 2015 Austin Williams VP, Space Vehicles CPOD: Big Capability in a Small Package Communications ADCS
ESA Technology Development Programmes
 ESA Technology R&D Programmes ESA Technology Development Programmes Lino de Faveri Space Technology Research Manager SER-SSO Engelberg, March 5th 2007 Workshop Photonics in Space, Engelberg, 5 th March
ESA Technology R&D Programmes ESA Technology Development Programmes Lino de Faveri Space Technology Research Manager SER-SSO Engelberg, March 5th 2007 Workshop Photonics in Space, Engelberg, 5 th March
The NASA-ESA Comparative Architecture Assessment (CAA)
") The NASA-ESA Comparative Architecture Assessment (CAA) Richard B. Leshner, PhD NASA Exploration Systems Mission Directorate Bernhard Hufenbach ESA Directorate of Human Spaceflight October 29, 2008 Overview
The NASA-ESA Comparative Architecture Assessment (CAA) Richard B. Leshner, PhD NASA Exploration Systems Mission Directorate Bernhard Hufenbach ESA Directorate of Human Spaceflight October 29, 2008 Overview
Proximity Operations Nano-Satellite Flight Demonstration (PONSFD) Overview
 Overview") Proximity Operations Nano-Satellite Flight Demonstration (PONSFD) Overview April 25 th, 2013 Scott MacGillivray, President Tyvak Nano-Satellite Systems LLC 15265 Alton Parkway, Suite 200 Irvine, CA 92618-2606
Proximity Operations Nano-Satellite Flight Demonstration (PONSFD) Overview April 25 th, 2013 Scott MacGillivray, President Tyvak Nano-Satellite Systems LLC 15265 Alton Parkway, Suite 200 Irvine, CA 92618-2606
CubeSat Integration into the Space Situational Awareness Architecture
 CubeSat Integration into the Space Situational Awareness Architecture Keith Morris, Chris Rice, Mark Wolfson Lockheed Martin Space Systems Company 12257 S. Wadsworth Blvd. Mailstop S6040 Littleton, CO
CubeSat Integration into the Space Situational Awareness Architecture Keith Morris, Chris Rice, Mark Wolfson Lockheed Martin Space Systems Company 12257 S. Wadsworth Blvd. Mailstop S6040 Littleton, CO
Proba-V QWG#7 Flight & GS status. 3 4 May 2018 ACRI, Sophia-Antipolis
 Proba-V QWG#7 Flight & GS status 3 4 May 2018 ACRI, Sophia-Antipolis Orbit status Slide 2 Orbit status LTDN evolution: 7 May 2013: 10:44:30 1 Dec. 2014: 10:51:08 26 Apr. 2017: 10:36:26 Oct 2017: 10:30
Proba-V QWG#7 Flight & GS status 3 4 May 2018 ACRI, Sophia-Antipolis Orbit status Slide 2 Orbit status LTDN evolution: 7 May 2013: 10:44:30 1 Dec. 2014: 10:51:08 26 Apr. 2017: 10:36:26 Oct 2017: 10:30
Systems for Green Operations ITD
 Annual Implementation Plan 2009 ITD Systems for Green Operations Annex 1E Proprietary information: SGO ITD 1/15 RECORD OF REVISIONS Revisions Date Description Issue 0 29/09/2008 Creation of the document
Annual Implementation Plan 2009 ITD Systems for Green Operations Annex 1E Proprietary information: SGO ITD 1/15 RECORD OF REVISIONS Revisions Date Description Issue 0 29/09/2008 Creation of the document
Airbus DS ESA Phase-0 L5 Spacecraft/Orbital Concept Overview. Emanuele Monchieri 6 th March 2017
 Airbus DS ESA Phase-0 L5 Spacecraft/Orbital Concept Overview Emanuele Monchieri 6 th March 2017 Airbus DS ESA Phase-0 L5 Spacecraft/Orbital Concept Overview Contents L5 Mission Outline Mission Concept
Airbus DS ESA Phase-0 L5 Spacecraft/Orbital Concept Overview Emanuele Monchieri 6 th March 2017 Airbus DS ESA Phase-0 L5 Spacecraft/Orbital Concept Overview Contents L5 Mission Outline Mission Concept
An Explore Mars BE BOLD technical project. Sanford Morton Emily Briere Cassidy Chan
 An Explore Mars BE BOLD technical project 1 Sanford Morton Emily Briere Cassidy Chan Agenda 2 Mission Overview Why? How? What? Technology Walkthrough A deep dive into our systems Inspira:on in Ac:on Ac@ve
An Explore Mars BE BOLD technical project 1 Sanford Morton Emily Briere Cassidy Chan Agenda 2 Mission Overview Why? How? What? Technology Walkthrough A deep dive into our systems Inspira:on in Ac:on Ac@ve
Automated Driving Systems with Model-Based Design for ISO 26262:2018 and SOTIF
 Automated Driving Systems with Model-Based Design for ISO 26262:2018 and SOTIF Konstantin Dmitriev The MathWorks, Inc. Certification and Standards Group 2018 The MathWorks, Inc. 1 Agenda Use of simulation
Automated Driving Systems with Model-Based Design for ISO 26262:2018 and SOTIF Konstantin Dmitriev The MathWorks, Inc. Certification and Standards Group 2018 The MathWorks, Inc. 1 Agenda Use of simulation
Cover. DLR-ESA Workshop on ARTES-11. SGEO: Implementation of of Artes-11. Dr. Andreas Winkler
 Cover DLR-ESA Workshop on ARTES-11 SGEO: Implementation of of Artes-11 Dr. Andreas Winkler June June29, 29, 2006 2006 Tegernsee, Tegernsee, Germany Germany Slide 1 Table Table of of Contents - Introduction
Cover DLR-ESA Workshop on ARTES-11 SGEO: Implementation of of Artes-11 Dr. Andreas Winkler June June29, 29, 2006 2006 Tegernsee, Tegernsee, Germany Germany Slide 1 Table Table of of Contents - Introduction
estec PROSPECT Project Objectives & Requirements Document
 estec European Space Research and Technology Centre Keplerlaan 1 2201 AZ Noordwijk The Netherlands T +31 (0)71 565 6565 F +31 (0)71 565 6040 www.esa.int PROSPECT Project Objectives & Requirements Document
estec European Space Research and Technology Centre Keplerlaan 1 2201 AZ Noordwijk The Netherlands T +31 (0)71 565 6565 F +31 (0)71 565 6040 www.esa.int PROSPECT Project Objectives & Requirements Document
e.deorbit Implementation Plan
 ESA UNCLASSIFIED Releasable to the Public /estec/ European Space Research and Technology Centre Keplerlaan 1 2201 AZ Noordwijk The Netherlands T +31 (0)71 565 6565 F +31 (0)71 565 6040 www.esa.int Prepared
ESA UNCLASSIFIED Releasable to the Public /estec/ European Space Research and Technology Centre Keplerlaan 1 2201 AZ Noordwijk The Netherlands T +31 (0)71 565 6565 F +31 (0)71 565 6040 www.esa.int Prepared
Ground Station Design for STSAT-3
 Technical Paper Int l J. of Aeronautical & Space Sci. 12(3), 283 287 (2011) DOI:10.5139/IJASS.2011.12.3.283 Ground Station Design for STSAT-3 KyungHee Kim*, Hyochoong Bang*, Jang-Soo Chae**, Hong-Young
Technical Paper Int l J. of Aeronautical & Space Sci. 12(3), 283 287 (2011) DOI:10.5139/IJASS.2011.12.3.283 Ground Station Design for STSAT-3 KyungHee Kim*, Hyochoong Bang*, Jang-Soo Chae**, Hong-Young
DLR s Optical Communications Program for 2018 and beyond. Dr. Sandro Scalise Institute of Communications and Navigation
 DLR.de Chart 1 DLR s Optical Communications Program for 2018 and beyond Dr. Sandro Scalise Institute of Communications and Navigation DLR.de Chart 3 Relevant Scenarios Unidirectional Links Main application
DLR.de Chart 1 DLR s Optical Communications Program for 2018 and beyond Dr. Sandro Scalise Institute of Communications and Navigation DLR.de Chart 3 Relevant Scenarios Unidirectional Links Main application
AstroBus S, the high performance and competitive Small Satellites platform for Earth Observation
 AstroBus S, the high performance and competitive Small Satellites platform for Earth Observation Dr. Jean Cheganças 10th IAA Symposium on Small Satellites for Earth Observation April 20-24, 2015 Berlin,
AstroBus S, the high performance and competitive Small Satellites platform for Earth Observation Dr. Jean Cheganças 10th IAA Symposium on Small Satellites for Earth Observation April 20-24, 2015 Berlin,
Cubesats and the challenges of Docking
 Cubesats and the challenges of Docking Luca Simonini Singapore Space Challenge 2017 Education outreaches, Thales Solutions Asia Pte. Ltd. August the 30 th 2017 September the 6 th 2017 www.thalesgroup.com
Cubesats and the challenges of Docking Luca Simonini Singapore Space Challenge 2017 Education outreaches, Thales Solutions Asia Pte. Ltd. August the 30 th 2017 September the 6 th 2017 www.thalesgroup.com
Asteroid Redirect Mission (ARM) Update to the Small Bodies Assessment Group
 Update to the Small Bodies Assessment Group") National Aeronautics and Space Administration Asteroid Redirect Mission (ARM) Update to the Small Bodies Assessment Group Michele Gates, Program Director, ARM Dan Mazanek, Mission Investigator, ARM June
National Aeronautics and Space Administration Asteroid Redirect Mission (ARM) Update to the Small Bodies Assessment Group Michele Gates, Program Director, ARM Dan Mazanek, Mission Investigator, ARM June
From ISS to Human Space Exploration: TAS-I contribution and perspectives
 Mem. S.A.It. Vol. 82, 443 c SAIt 2011 Memorie della From ISS to Human Space Exploration: TAS-I contribution and perspectives P. Messidoro Thales Alenia Space Italia Strada A. di Collegno 253, I-10146 Torino,
Mem. S.A.It. Vol. 82, 443 c SAIt 2011 Memorie della From ISS to Human Space Exploration: TAS-I contribution and perspectives P. Messidoro Thales Alenia Space Italia Strada A. di Collegno 253, I-10146 Torino,
Design and Operation of Micro-Gravity Dynamics and Controls Laboratories
 Design and Operation of Micro-Gravity Dynamics and Controls Laboratories Georgia Institute of Technology Space Systems Engineering Conference Atlanta, GA GT-SSEC.F.4 Alvar Saenz-Otero David W. Miller MIT
Design and Operation of Micro-Gravity Dynamics and Controls Laboratories Georgia Institute of Technology Space Systems Engineering Conference Atlanta, GA GT-SSEC.F.4 Alvar Saenz-Otero David W. Miller MIT
The DLR On-Orbit Servicing Testbed
 The DLR On-Orbit Servicing Testbed J. Artigas, R. Lampariello, B. Brunner, M. Stelzer, C. Borst, K. Landzettel, G. Hirzinger, A. Albu-Schäffer Robotics and Mechatronics Center, DLR VR-OOS Workshop 2012
The DLR On-Orbit Servicing Testbed J. Artigas, R. Lampariello, B. Brunner, M. Stelzer, C. Borst, K. Landzettel, G. Hirzinger, A. Albu-Schäffer Robotics and Mechatronics Center, DLR VR-OOS Workshop 2012
FlexCore: Low-Cost Attitude Determination and Control Enabling High-Performance Small Spacecraft
 SSC16-X-7 FlexCore: Low-Cost Attitude Determination and Control Enabling High-Performance Small Spacecraft Daniel Hegel Blue Canyon Technologies 2425 55 th St. Suite A-200, Boulder, CO, 80301; 720 458-0703
SSC16-X-7 FlexCore: Low-Cost Attitude Determination and Control Enabling High-Performance Small Spacecraft Daniel Hegel Blue Canyon Technologies 2425 55 th St. Suite A-200, Boulder, CO, 80301; 720 458-0703
Space Debris Mitigation
 Space Debris Mitigation The CleanSpace One Project Volker Gass, Claude Nicollier, Anton Ivanov, Muriel Richard Swiss Space Center 27 March 2012 Ref. SSC-CSO-1-0-Generic Presentation 27-03-12.pptx Context
Space Debris Mitigation The CleanSpace One Project Volker Gass, Claude Nicollier, Anton Ivanov, Muriel Richard Swiss Space Center 27 March 2012 Ref. SSC-CSO-1-0-Generic Presentation 27-03-12.pptx Context
Relative Cost and Performance Comparison of GEO Space Situational Awareness Architectures
 Relative Cost and Performance Comparison of GEO Space Situational Awareness Architectures Background Keith Morris Lockheed Martin Space Systems Company Chris Rice Lockheed Martin Space Systems Company
Relative Cost and Performance Comparison of GEO Space Situational Awareness Architectures Background Keith Morris Lockheed Martin Space Systems Company Chris Rice Lockheed Martin Space Systems Company
The CNES French Space Agency Planetary Program Low cost perspectives
 The CNES French Space Agency Planetary Program Low cost perspectives Pierre W. Bousquet Senior expert in Planetology, Exploration and Microgravity Outline of the talk ChemCam Credit: NASA/JPL-Caltech Instrumentation
The CNES French Space Agency Planetary Program Low cost perspectives Pierre W. Bousquet Senior expert in Planetology, Exploration and Microgravity Outline of the talk ChemCam Credit: NASA/JPL-Caltech Instrumentation
More Info at Open Access Database by S. Dutta and T. Schmidt
 More Info at Open Access Database www.ndt.net/?id=17657 New concept for higher Robot position accuracy during thermography measurement to be implemented with the existing prototype automated thermography
More Info at Open Access Database www.ndt.net/?id=17657 New concept for higher Robot position accuracy during thermography measurement to be implemented with the existing prototype automated thermography
Secretary-General of the European Commission, signed by Mr Jordi AYET PUIGARNAU, Director
 COUNCIL OF THE EUROPEAN UNION Brussels, 20 August 2013 (OR. en) 13077/13 COVER NOTE From: date of receipt: 1 August 2013 To: No. Cion doc.: Subject: ESPACE 54 COMPET 608 RECH 380 IND 233 TRANS 446 COSDP
COUNCIL OF THE EUROPEAN UNION Brussels, 20 August 2013 (OR. en) 13077/13 COVER NOTE From: date of receipt: 1 August 2013 To: No. Cion doc.: Subject: ESPACE 54 COMPET 608 RECH 380 IND 233 TRANS 446 COSDP
Robotics in Space. Ian Taylor MP. Co-Chair, UK Parliamentary Space Committee VIIIth European Interparliamentary Space Conference
 Robotics in Space Ian Taylor MP Co-Chair, UK Parliamentary Space Committee www.iantaylormp.com VIIIth European Interparliamentary Space Conference Brussels 12/14 June 2006 1 Men (and Women) in Space Very
Robotics in Space Ian Taylor MP Co-Chair, UK Parliamentary Space Committee www.iantaylormp.com VIIIth European Interparliamentary Space Conference Brussels 12/14 June 2006 1 Men (and Women) in Space Very
The EDA SUM Project. Surveillance in an Urban environment using Mobile sensors. 2012, September 13 th - FMV SENSORS SYMPOSIUM 2012
 Surveillance in an Urban environment using Mobile sensors 2012, September 13 th - FMV SENSORS SYMPOSIUM 2012 TABLE OF CONTENTS European Defence Agency Supported Project 1. SUM Project Description. 2. Subsystems
Surveillance in an Urban environment using Mobile sensors 2012, September 13 th - FMV SENSORS SYMPOSIUM 2012 TABLE OF CONTENTS European Defence Agency Supported Project 1. SUM Project Description. 2. Subsystems
INTRODUCTION The validity of dissertation Object of investigation Subject of investigation The purpose: of the tasks The novelty:
 INTRODUCTION The validity of dissertation. According to the federal target program "Maintenance, development and use of the GLONASS system for 2012-2020 years the following challenges were determined:
INTRODUCTION The validity of dissertation. According to the federal target program "Maintenance, development and use of the GLONASS system for 2012-2020 years the following challenges were determined:
HEOMD Update NRC Aeronautics and Space Engineering Board Oct. 16, 2014
 National Aeronautics and Space Administration HEOMD Update NRC Aeronautics and Space Engineering Board Oct. 16, 2014 Greg Williams DAA for Policy and Plans Human Exploration and Operations Mission Directorate
National Aeronautics and Space Administration HEOMD Update NRC Aeronautics and Space Engineering Board Oct. 16, 2014 Greg Williams DAA for Policy and Plans Human Exploration and Operations Mission Directorate
Glossary. Glossary 253
 Glossary 253 Glossary Itokawa Asteroid is one of the smallest ever celestial object with around 600meters length and a surface covered with boulders and craters. Konstantin E. Tsiolkovsky's 16 Stages of
Glossary 253 Glossary Itokawa Asteroid is one of the smallest ever celestial object with around 600meters length and a surface covered with boulders and craters. Konstantin E. Tsiolkovsky's 16 Stages of
Expanding human activities beyond LEO
 Expanding human activities beyond LEO 12 April 2018 Piero.messsina@esa.int ESA UNCLASSIFIED - For Official Use Why Explore? New knowledge Challenge driven innovation Inspiration Global partners What
Expanding human activities beyond LEO 12 April 2018 Piero.messsina@esa.int ESA UNCLASSIFIED - For Official Use Why Explore? New knowledge Challenge driven innovation Inspiration Global partners What
NWO Servicing NGST. Chuck Lillie November 6, 2008
 NWO Servicing NGST Chuck Lillie November 6, 2008 Design for Servicing Future space observatories should be designed to enable on-orbit servicing to: Replenish expendables Replace limited-lifetime items
NWO Servicing NGST Chuck Lillie November 6, 2008 Design for Servicing Future space observatories should be designed to enable on-orbit servicing to: Replenish expendables Replace limited-lifetime items
Inter-Agency Space Debris Coordination Committee Space Debris Mitigation Guidelines Update
 Inter-Agency Space Debris Coordination Committee (IADC) Inter-Agency Space Debris Coordination Committee Update 45 th Session of the Scientific and Technical Subcommittee United Nations Committee on the
Inter-Agency Space Debris Coordination Committee (IADC) Inter-Agency Space Debris Coordination Committee Update 45 th Session of the Scientific and Technical Subcommittee United Nations Committee on the
InnoSat and MATS An Ingenious Spacecraft Platform applied to Mesospheric Tomography and Spectroscopy
 Niclas Larsson N. Larsson, R. Lilja (OHB Sweden), M. Örth, S. Söderholm (ÅAC Microtec), J. Köhler, R. Lindberg (SNSB), J. Gumbel (MISU) SATELLITE SYSTEMS InnoSat and MATS An Ingenious Spacecraft Platform
Niclas Larsson N. Larsson, R. Lilja (OHB Sweden), M. Örth, S. Söderholm (ÅAC Microtec), J. Köhler, R. Lindberg (SNSB), J. Gumbel (MISU) SATELLITE SYSTEMS InnoSat and MATS An Ingenious Spacecraft Platform
GAMMa - A modular ascender concept for sample return missions
 GAMMa - A modular ascender concept for sample return missions IPPW 15, Boulder, Colorado, USA 14 th June 2018 R. Buchwald, F. Ebert, O. Angerer Lunar Polar Sample Return (LPSR) Mars Sample Return (MSR)
GAMMa - A modular ascender concept for sample return missions IPPW 15, Boulder, Colorado, USA 14 th June 2018 R. Buchwald, F. Ebert, O. Angerer Lunar Polar Sample Return (LPSR) Mars Sample Return (MSR)
Meeting the Challenge of Low Cost Lunar Exploration
 Space Missions Meeting the Challenge of Low Cost Lunar Exploration Nadeem Ghafoor MDA / SSL LEAG 2013, 14-16 th October, APL, Laurel MD Changing Times New space exploration era Positives Exciting new exploration
Space Missions Meeting the Challenge of Low Cost Lunar Exploration Nadeem Ghafoor MDA / SSL LEAG 2013, 14-16 th October, APL, Laurel MD Changing Times New space exploration era Positives Exciting new exploration
launch probability of success
 Using Architecture Models to Understand Policy Impacts Utility 1 0.995 0.99 Policy increases cost B C D 10 of B-TOS architectures have cost increase under restrictive launch policy for a minimum cost decision
Using Architecture Models to Understand Policy Impacts Utility 1 0.995 0.99 Policy increases cost B C D 10 of B-TOS architectures have cost increase under restrictive launch policy for a minimum cost decision
VBS - The Optical Rendezvous and Docking Sensor for PRISMA
 Downloaded from orbit.dtu.dk on: Jul 04, 2018 VBS - The Optical Rendezvous and Docking Sensor for PRISMA Jørgensen, John Leif; Benn, Mathias Published in: Publication date: 2010 Document Version Publisher's
Downloaded from orbit.dtu.dk on: Jul 04, 2018 VBS - The Optical Rendezvous and Docking Sensor for PRISMA Jørgensen, John Leif; Benn, Mathias Published in: Publication date: 2010 Document Version Publisher's
CubeSat Standard Updates
 CubeSat Standard Updates Justin Carnahan California Polytechnic State University April 25, 2013 CubeSat Developers Workshop Agenda The CubeSat Standard CDS Rev. 12 to Rev. 13 Changes The 6U CubeSat Design
CubeSat Standard Updates Justin Carnahan California Polytechnic State University April 25, 2013 CubeSat Developers Workshop Agenda The CubeSat Standard CDS Rev. 12 to Rev. 13 Changes The 6U CubeSat Design
ESTEC-CNES ROVER REMOTE EXPERIMENT
 ESTEC-CNES ROVER REMOTE EXPERIMENT Luc Joudrier (1), Angel Munoz Garcia (1), Xavier Rave et al (2) (1) ESA/ESTEC/TEC-MMA (Netherlands), Email: luc.joudrier@esa.int (2) Robotic Group CNES Toulouse (France),
ESTEC-CNES ROVER REMOTE EXPERIMENT Luc Joudrier (1), Angel Munoz Garcia (1), Xavier Rave et al (2) (1) ESA/ESTEC/TEC-MMA (Netherlands), Email: luc.joudrier@esa.int (2) Robotic Group CNES Toulouse (France),
Satellite Technology for Future Applications
 Satellite Technology for Future Applications WSRF Panel n 4 Dubai, 3 March 2010 Guy Perez VP Telecom Satellites Programs 1 Commercial in confidence / All rights reserved, 2010, Thales Alenia Space Content
Satellite Technology for Future Applications WSRF Panel n 4 Dubai, 3 March 2010 Guy Perez VP Telecom Satellites Programs 1 Commercial in confidence / All rights reserved, 2010, Thales Alenia Space Content
ESA Strategic Framework for Human Exploration
 ESA Strategic Framework for Human Exploration B. Hufenbach EC Workshop on Space Science and Exploration Madrid, 18/2/13 Strategic Framework ESA DG s Agenda 2015 C/M12 Decisions Strategic Guidelines- Programmes
ESA Strategic Framework for Human Exploration B. Hufenbach EC Workshop on Space Science and Exploration Madrid, 18/2/13 Strategic Framework ESA DG s Agenda 2015 C/M12 Decisions Strategic Guidelines- Programmes
Status of the European Robotic Arm Project and Other Activities of the Robotics Office of ESA's ISS Programme
 Status of the European Robotic Arm Project and Other Activities of the Robotics Office of ESA's ISS Programme Philippe Schoonejans Head, ERA and Robotic Projects Office ESA directorate of Human Spaceflight
Status of the European Robotic Arm Project and Other Activities of the Robotics Office of ESA's ISS Programme Philippe Schoonejans Head, ERA and Robotic Projects Office ESA directorate of Human Spaceflight
Physics Based Sensor simulation
 Physics Based Sensor simulation Jordan Gorrochotegui - Product Manager Software and Services Mike Phillips Software Engineer Restricted Siemens AG 2017 Realize innovation. Siemens offers solutions across
Physics Based Sensor simulation Jordan Gorrochotegui - Product Manager Software and Services Mike Phillips Software Engineer Restricted Siemens AG 2017 Realize innovation. Siemens offers solutions across
HEMERA Constellation of passive SAR-based micro-satellites for a Master/Slave configuration
 HEMERA Constellation of passive SAR-based micro-satellites for a Master/Slave HEMERA Team Members: Andrea Bellome, Giulia Broggi, Luca Collettini, Davide Di Ienno, Edoardo Fornari, Leandro Lucchese, Andrea
HEMERA Constellation of passive SAR-based micro-satellites for a Master/Slave HEMERA Team Members: Andrea Bellome, Giulia Broggi, Luca Collettini, Davide Di Ienno, Edoardo Fornari, Leandro Lucchese, Andrea
Mid Term Exam SES 405 Exploration Systems Engineering 3 March Your Name
 Mid Term Exam SES 405 Exploration Systems Engineering 3 March 2016 --------------------------------------------------------------------- Your Name Short Definitions (2 points each): Heuristics - refers
Mid Term Exam SES 405 Exploration Systems Engineering 3 March 2016 --------------------------------------------------------------------- Your Name Short Definitions (2 points each): Heuristics - refers
EUROPEAN SPACE AGENCY INDUSTRIAL POLICY COMMITTEE GENERAL SUPPORT TECHNOLOGY PROGRAMME GSTP-5 ELEMENT-2 INITIAL WORK PLAN
 Att.: Annexes Paris, 9 April 2009 (English only) EUROPEAN SPACE AGENCY INDUSTRIAL POLICY COMMITTEE GENERAL SUPPORT TECHNOLOGY PROGRAMME GSTP-5 ELEMENT-2 INITIAL WORK PLAN SUMMARY This document presents
Att.: Annexes Paris, 9 April 2009 (English only) EUROPEAN SPACE AGENCY INDUSTRIAL POLICY COMMITTEE GENERAL SUPPORT TECHNOLOGY PROGRAMME GSTP-5 ELEMENT-2 INITIAL WORK PLAN SUMMARY This document presents
Design of a Remote-Cockpit for small Aerospace Vehicles
 Design of a Remote-Cockpit for small Aerospace Vehicles Muhammad Faisal, Atheel Redah, Sergio Montenegro Universität Würzburg Informatik VIII, Josef-Martin Weg 52, 97074 Würzburg, Germany Phone: +49 30
Design of a Remote-Cockpit for small Aerospace Vehicles Muhammad Faisal, Atheel Redah, Sergio Montenegro Universität Würzburg Informatik VIII, Josef-Martin Weg 52, 97074 Würzburg, Germany Phone: +49 30
The Virtual Spacecraft Reference Facility
 The Virtual Spacecraft M.Schön, M.Arcioni, D.Temperanza, K.Hjortnaes Michael.Schoen@esa.int On-Board Software Systems Section 1 Agenda Why? What? How? When? 2 The Virtual Spacecraft architecture view EuroSim
The Virtual Spacecraft M.Schön, M.Arcioni, D.Temperanza, K.Hjortnaes Michael.Schoen@esa.int On-Board Software Systems Section 1 Agenda Why? What? How? When? 2 The Virtual Spacecraft architecture view EuroSim
ARMADILLO: Subsystem Booklet
 ARMADILLO: Subsystem Booklet Mission Overview The ARMADILLO mission is the Air Force Research Laboratory s University Nanosatellite Program s 7 th winner. ARMADILLO is a 3U cube satellite (cubesat) constructed
ARMADILLO: Subsystem Booklet Mission Overview The ARMADILLO mission is the Air Force Research Laboratory s University Nanosatellite Program s 7 th winner. ARMADILLO is a 3U cube satellite (cubesat) constructed
ASSESSMENT BY ESA OF GCOS CLIMATE MONITORING PRINCIPLES FOR GMES
 Prepared by ESA Agenda Item: III.5 Discussed in WG3 ASSESSMENT BY ESA OF GCOS CLIMATE MONITORING PRINCIPLES FOR GMES The ESA Sentinel missions are being designed for the GMES services, with special emphasis
Prepared by ESA Agenda Item: III.5 Discussed in WG3 ASSESSMENT BY ESA OF GCOS CLIMATE MONITORING PRINCIPLES FOR GMES The ESA Sentinel missions are being designed for the GMES services, with special emphasis