LiDAR Mobile Mapping with centimeter accuracy in long tunnels. Jens Kremer Lausanne,
|
|
|
- Poppy Logan
- 6 years ago
- Views:
Transcription

1 LiDAR Mobile Mapping with centimeter accuracy in long tunnels Jens Kremer Lausanne,




2 System layout GNSS conditions in Mobile Mapping Example FRA - optimal GNSS conditions Example SSB - navigation in the absence of GNSS



















3 Modular Sensor Management System Mission planning Guidance Georeferencing Sensor management Data storage
 < 2 /h (MEMS) All IMUs are export free!")
4 AEROcontrol / TERRAcontrol with IMU-IIf / IMU-m Integrated GPS/GLONASS/BEIDOU/QZSS receiver with DIA+ Dual Antenna & Dual IMU Support Fibre Optic Gyros / MEMS Gyros Data rate up to 512Hz Gyro Drift 0.03 /h (FOG) < 2 /h (MEMS) All IMUs are export free!












5 Modular Sensor Management System - SMU


6 Cavalon Aerial Survey
7 System layout GNSS conditions in Mobile Mapping Example FRA - optimal GNSS conditions Example SSB - navigation in the absence of GNSS




8 Mobile Mapping & Airborne LiDAR System
9 GNSS: Air vs. Ground Airborne LiDAR Mobile LiDAR Mapping optimal GNSS conditions diverse GNSS conditions from near airborne to the absence of GNSS in tunnels

10 Navigation in the Absence of GNSS Example: Tunnel profile for the middle of a tram tunnel. Four separate passes, up to 15 min without GNSS aiding.
11 Processing Mobile GNSS/IMU Data Multi Antenna ZUPTs Odometer Different Initialization Methods Include extra Position Information
12 System layout GNSS conditions in Mobile Mapping Example FRA - optimal GNSS conditions Example SSB - navigation in the absence of GNSS

13 Example FRA - optimal GNSS conditions ICAO Guidlines: Ensurance of a consistent implementation of international standards. -> Slopes of taxiways and runways ±1.5%
14 StreetMapper: Trajectory
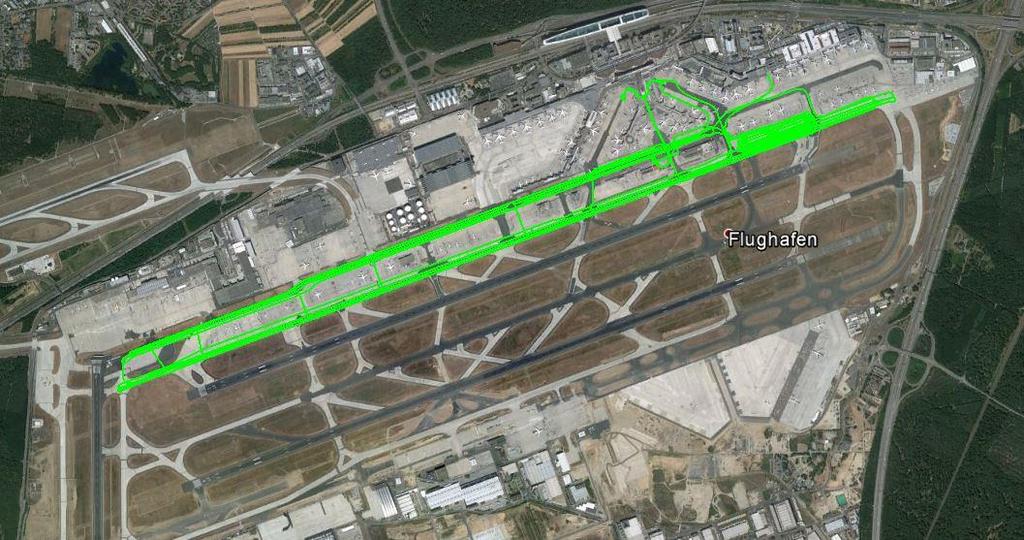
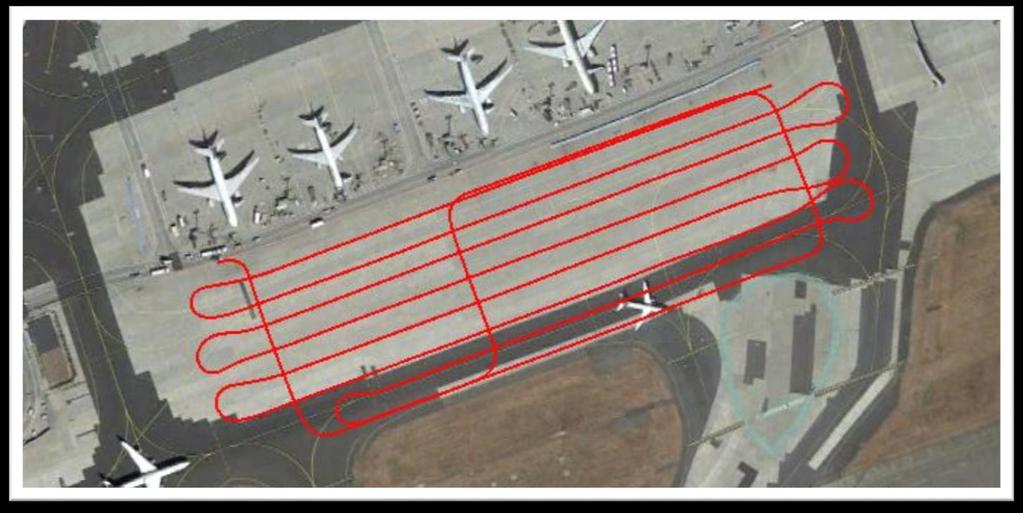
15 StreetMapper: Trajectory Detail

16 StreetMapper: Pointcloud for the DTM longitudinal section
 local slope (%)")
17 StreetMapper: Pointcloud (Detail) local slope (%)
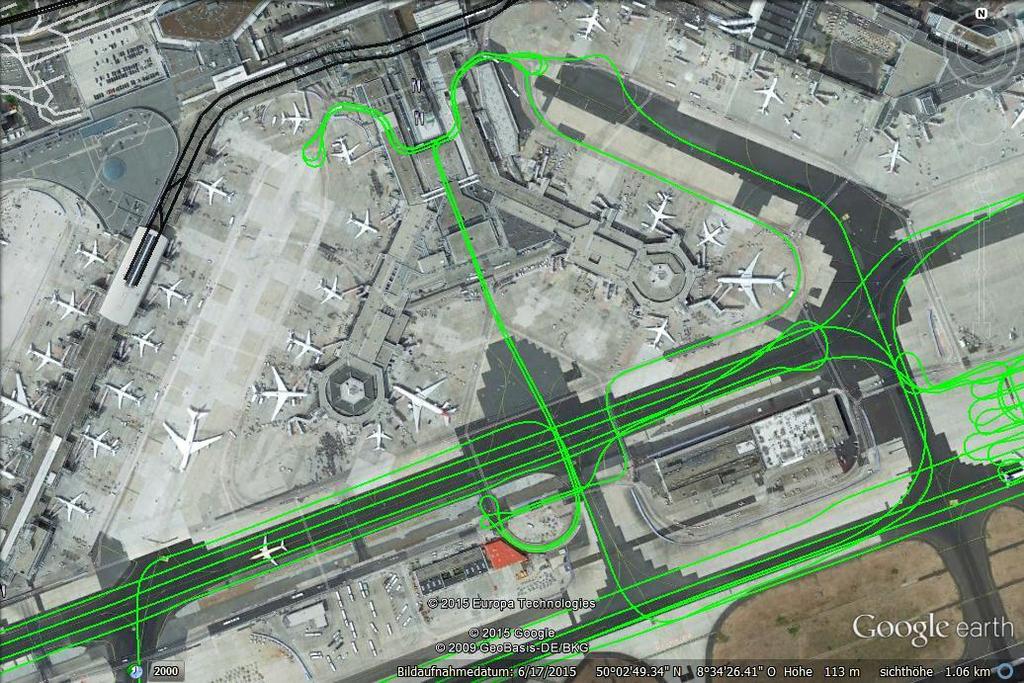
18 StreetMapper: Trajectory

19 StreetMapper: Trajectory
20 System layout GNSS conditions in Mobile Mapping Example FRA - optimal GNSS conditions Example SSB - navigation in the absence of GNSS

21 Navigation in the Absence of GNSS Without aiding, the positon error of inertial navigation rises with (at least) t 2. Forward reverse smoothing improves the situation, but with increasing times, we still get a problem: Difference between a solution with an artificial 100sec GNSS gap and a solution with continuous GNSS. top: bottom: forward solution smoothed solution
22 Navigation in the Absence of GNSS Standard way of mobile laser data adjustment: Step 1: GNSS/IMU processing; export of a trajectory Step 2: Adjustment of the trajectory to fit GCPs or to create a relative match of different passes. The trajectory is deformed to give a better match. Correlations between the position and the orientation are not taken into account. Offsets and drifts may not reflect the correct physical situation. The information from the IMU and from the GCPs is not fully exploited. The required number of GCPs might be higher than necessary. Information about the source of the mismatches is lost (gross errors are difficult to detect).


23 Navigation in the Absence of GNSS Workflow implemented in TERRAoffice: Step 1: GNSS/IMU processing; export of a trajectory Step 2: Measure the Ground Control Points in the pointcloud Step 3: GNSS/IMU processing, taking into account the additional position measurement at the GCP positions.
 was scanned with an IGI RailMapper, equipped with")
24 Example: Stuttgarter Straßenbahn A part of the underground network of the Stuttgarter Straßenbahnen (SSB) was scanned with an IGI RailMapper, equipped with two Z+F 9012.
25 Example: Stuttgarter Straßenbahn The tunnel was scanned four times: Forward / reverse with about 50 km/h and Forward / reverse with 20 km/h. 3.6 km tunnel length. 61 marked GCPs. Track # Max. Speed [km/h] Duration [sec] * * incl. a 61 sec stop

26 Example: Stuttgarter Straßenbahn GCPs:
27 Example: Stuttgarter Straßenbahn Track 2: Track # Max. Speed [km/h] Duration [sec] Used GCPs Avg. GCP dist. [m] Average time between GCP [sec] Determination of the position offset at the 10 or 27 used GCPs, respectively. Introduction of the GCP measurements at the related times. Re-processing of the trajectory with the newly determined position measurements. New georeferencing of the laser points.

28 Example: Stuttgarter Straßenbahn 0 GCP/ 27 Check Circle: GCP Triangle: Checkpoint
29 Example: Stuttgarter Straßenbahn Track 2: Residual at the independent check points. (0 GCPs/ 27 checkpoints) Mean error: 98 cm
30 Example: Stuttgarter Straßenbahn 10 GCP/ 50 Check
31 Example: Stuttgarter Straßenbahn Track 2: Residual at the independent check points. (10 GCPs/ 50 checkpoints) Mean error: 4.5 cm

32 Example: Stuttgarter Straßenbahn 27 GCP/ 34 Check Circle: GCP Triangle: Checkpoint
33 Example: Stuttgarter Straßenbahn Track 2: Residual at the independent check points. (27 GCPs/ 34 checkpoints) Mean error: 2.2 cm
34 Example: Stuttgarter Straßenbahn Supplementary measurement of unmarked features in the station Marienplatz by ifp, Univ. Stuttgart nach Vaihingen von Vaihingen Von Ö Platz nach Ö Platz IGI27 Stationsschild Marienplatz (i-punkt) IGI29 Stationsschild Marienplatz (i-punkt) IGI26 Mauerecke (Fußbodenniveau) IGI28 Mauerecke (Fußbodenniveau) IGI25 Bahnsteigkante

35 Example: Stuttgarter Straßenbahn IGI28 = IGI26 =
36 Example: Stuttgarter Straßenbahn Track # Max. Speed [km/h] Duration [sec] Number of Points RMS east [cm] RMS north [cm] RMS height [cm]

37 Example: Stuttgarter Straßenbahn
38 Conclusion o o o The use of GCP measurements directly inside the GNSS/IMU navigation process leads to an optimal utilization of the information. The improvements are usable for all georeferenced sensors, like optical or thermal cameras. It minimizes the required number of (expensive) points to a minimum and it extends the usability of GNNS/IMU based Mobile Mapping Systems to long tunnels and tunnel-systems.
Excursion to IGI Company
 INSTITUT FÜR PHOTOGRAMMETRIE (IFP) Excursion to IGI Company 22.10.2015 23.10.2015 GeoEngine Master Students (3 rd semester) and Geodäsie und Geoinfromatik Master students (1 st semester) Figure 1: Group
INSTITUT FÜR PHOTOGRAMMETRIE (IFP) Excursion to IGI Company 22.10.2015 23.10.2015 GeoEngine Master Students (3 rd semester) and Geodäsie und Geoinfromatik Master students (1 st semester) Figure 1: Group
IGI mbh - 40 years celebration
 ntegrated eospatial nnovations IGI mbh - 40 years celebration Founded 1978 More than 500 customers in 84 different countries World-wide technical support IGI office in Kreuztal, Germany 3 Open Skies Area
ntegrated eospatial nnovations IGI mbh - 40 years celebration Founded 1978 More than 500 customers in 84 different countries World-wide technical support IGI office in Kreuztal, Germany 3 Open Skies Area
ATLANS-C. mobile mapping position and orientation solution
 mobile mapping position and orientation solution mobile mapping position and orientation solution THE SMALLEST ATLANS-C is a high performance all-in-one position and orientation solution for both land
mobile mapping position and orientation solution mobile mapping position and orientation solution THE SMALLEST ATLANS-C is a high performance all-in-one position and orientation solution for both land
NovAtel SPAN and Waypoint GNSS + INS Technology
 NovAtel SPAN and Waypoint GNSS + INS Technology SPAN Technology SPAN provides real-time positioning and attitude determination where traditional GNSS receivers have difficulties; in urban canyons or heavily
NovAtel SPAN and Waypoint GNSS + INS Technology SPAN Technology SPAN provides real-time positioning and attitude determination where traditional GNSS receivers have difficulties; in urban canyons or heavily
CODEVINTEC. Miniature and accurate IMU, AHRS, INS/GNSS Attitude and Heading Reference Systems
 45 27 39.384 N 9 07 30.145 E Miniature and accurate IMU, AHRS, INS/GNSS Attitude and Heading Reference Systems Aerospace Land/Automotive Marine Subsea Miniature inertial sensors 0.1 Ellipse Series New
45 27 39.384 N 9 07 30.145 E Miniature and accurate IMU, AHRS, INS/GNSS Attitude and Heading Reference Systems Aerospace Land/Automotive Marine Subsea Miniature inertial sensors 0.1 Ellipse Series New
IGI Ltd. Serving the Aerial Survey Industry for more than 20 Years
 'Photogrammetric Week 05' Dieter Fritsch, Ed. Wichmann Verlag, Heidelberg 2005. Kremer 33 IGI Ltd. Serving the Aerial Survey Industry for more than 20 Years JENS KREMER, Kreuztal ABSTRACT Since 1982 IGI
'Photogrammetric Week 05' Dieter Fritsch, Ed. Wichmann Verlag, Heidelberg 2005. Kremer 33 IGI Ltd. Serving the Aerial Survey Industry for more than 20 Years JENS KREMER, Kreuztal ABSTRACT Since 1982 IGI
Advanced Methods to Identify Asphalt Pavement Delamination (R06D) Ground Penetrating Radar (GPR) Caltrans
 Ground Penetrating Radar (GPR) Caltrans") Advanced Methods to Identify Asphalt Pavement Delamination (R06D) Ground Penetrating Radar (GPR) Caltrans William Owen Peer Exchange August 1-3, 2018 Introduction How We Got Here Strategic Highway Research
Advanced Methods to Identify Asphalt Pavement Delamination (R06D) Ground Penetrating Radar (GPR) Caltrans William Owen Peer Exchange August 1-3, 2018 Introduction How We Got Here Strategic Highway Research
NovAtel SPAN and Waypoint. GNSS + INS Technology
 NovAtel SPAN and Waypoint GNSS + INS Technology SPAN Technology SPAN provides continual 3D positioning, velocity and attitude determination anywhere satellite reception may be compromised. SPAN uses NovAtel
NovAtel SPAN and Waypoint GNSS + INS Technology SPAN Technology SPAN provides continual 3D positioning, velocity and attitude determination anywhere satellite reception may be compromised. SPAN uses NovAtel
Leica - 3 rd Generation Airborne Digital Sensors Features / Benefits for Remote Sensing & Environmental Applications
 Leica - 3 rd Generation Airborne Digital Sensors Features / Benefits for Remote Sensing & Environmental Applications Arthur Rohrbach, Sensor Sales Dir Europe, Middle-East and Africa (EMEA) Luzern, Switzerland,
Leica - 3 rd Generation Airborne Digital Sensors Features / Benefits for Remote Sensing & Environmental Applications Arthur Rohrbach, Sensor Sales Dir Europe, Middle-East and Africa (EMEA) Luzern, Switzerland,
Using Static and Mobile Laser Scanners to Measure and Manage Open Pit Mines
 Using Static and Mobile Laser Scanners to Measure and Manage Open Pit Mines by Dario Conforti, Teledyne Optech Email: dario.conforti@teledyne.com www.teledyneoptech.com 1 Case Studies Case Studies Static
Using Static and Mobile Laser Scanners to Measure and Manage Open Pit Mines by Dario Conforti, Teledyne Optech Email: dario.conforti@teledyne.com www.teledyneoptech.com 1 Case Studies Case Studies Static
SPAN Tightly Coupled GNSS+INS Technology Performance for Exceptional 3D, Continuous Position, Velocity & Attitude
 SPAN Tightly Coupled GNSSINS Technology Performance for Exceptional 3D, Continuous Position, Velocity & Attitude SPAN Technology NOVATEL S SPAN TECHNOLOGY PROVIDES CONTINUOUS 3D POSITIONING, VELOCITY AND
SPAN Tightly Coupled GNSSINS Technology Performance for Exceptional 3D, Continuous Position, Velocity & Attitude SPAN Technology NOVATEL S SPAN TECHNOLOGY PROVIDES CONTINUOUS 3D POSITIONING, VELOCITY AND
GPS-Aided INS Datasheet Rev. 2.6
 GPS-Aided INS 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO and BEIDOU navigation
GPS-Aided INS 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO and BEIDOU navigation
Jens Kremer ISPRS Hannover Workshop 2017,
 Jens Kremer ISPRS Hannover Workshop 2017, 8.06.2017 Modular aerial camera-systems The IGI UrbanMapper 2-in1 concept System Layout The DigiCAM-100 module The IGI UrbanMapper Sensor geometry & stitching
Jens Kremer ISPRS Hannover Workshop 2017, 8.06.2017 Modular aerial camera-systems The IGI UrbanMapper 2-in1 concept System Layout The DigiCAM-100 module The IGI UrbanMapper Sensor geometry & stitching
Motion & Navigation Solution
 Navsight Land & Air Solution Motion & Navigation Solution FOR SURVEYING APPLICATIONS Motion, Navigation, and Geo-referencing NAVSIGHT LAND/AIR SOLUTION is a full high performance inertial navigation solution
Navsight Land & Air Solution Motion & Navigation Solution FOR SURVEYING APPLICATIONS Motion, Navigation, and Geo-referencing NAVSIGHT LAND/AIR SOLUTION is a full high performance inertial navigation solution
Inertial Navigation System
 Apogee Series ULTIMATE ACCURACY MEMS Inertial Navigation System INS MRU AHRS ITAR Free 0.005 RMS Motion Sensing & Georeferencing APOGEE SERIES makes high accuracy affordable for all surveying companies.
Apogee Series ULTIMATE ACCURACY MEMS Inertial Navigation System INS MRU AHRS ITAR Free 0.005 RMS Motion Sensing & Georeferencing APOGEE SERIES makes high accuracy affordable for all surveying companies.
GPS-Aided INS Datasheet Rev. 3.0
 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS, BEIDOU and L-Band navigation
1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS, BEIDOU and L-Band navigation
GPS-Aided INS Datasheet Rev. 2.7
 1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS and BEIDOU navigation and highperformance
1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS and BEIDOU navigation and highperformance
New Developments of Inertial Navigation Systems at Applanix
 Hutton et al 1 New Developments of Inertial Navigation Systems at Applanix JOE HUTTON, TATYANA BOURKE, BRUNO SCHERZINGER, APPLANIX ABSTRACT GNSS-Aided Inertial Navigation for Direct Georeferencing of aerial
Hutton et al 1 New Developments of Inertial Navigation Systems at Applanix JOE HUTTON, TATYANA BOURKE, BRUNO SCHERZINGER, APPLANIX ABSTRACT GNSS-Aided Inertial Navigation for Direct Georeferencing of aerial
Technical Notes FOR MARINE MAPPING APPLICATIONS. Leading the way with increased reliability.
 FOR MARINE MAPPING APPLICATIONS Technical Notes Leading the way with increased reliability. Industry-leading post-processing software designed to maximize the accuracy potential of your POS MV (Position
FOR MARINE MAPPING APPLICATIONS Technical Notes Leading the way with increased reliability. Industry-leading post-processing software designed to maximize the accuracy potential of your POS MV (Position
Integration of Inertial Measurements with GNSS -NovAtel SPAN Architecture-
 Integration of Inertial Measurements with GNSS -NovAtel SPAN Architecture- Sandy Kennedy, Jason Hamilton NovAtel Inc., Canada Edgar v. Hinueber imar GmbH, Germany ABSTRACT As a GNSS system manufacturer,
Integration of Inertial Measurements with GNSS -NovAtel SPAN Architecture- Sandy Kennedy, Jason Hamilton NovAtel Inc., Canada Edgar v. Hinueber imar GmbH, Germany ABSTRACT As a GNSS system manufacturer,
Lecture 9: LiDAR System overview and instrument calibration
 Please insert a picture (Insert, Picture, from file). Size according to grey field (10 cm x 25.4 cm). Scale picture: highlight, pull corner point Cut picture: highlight, choose the cutting icon from the
Please insert a picture (Insert, Picture, from file). Size according to grey field (10 cm x 25.4 cm). Scale picture: highlight, pull corner point Cut picture: highlight, choose the cutting icon from the
Helicopter Aerial Laser Ranging
 Helicopter Aerial Laser Ranging Håkan Sterner TopEye AB P.O.Box 1017, SE-551 11 Jönköping, Sweden 1 Introduction Measuring distances with light has been used for terrestrial surveys since the fifties.
Helicopter Aerial Laser Ranging Håkan Sterner TopEye AB P.O.Box 1017, SE-551 11 Jönköping, Sweden 1 Introduction Measuring distances with light has been used for terrestrial surveys since the fifties.
Digital airborne cameras Status & future
 Institut für Photogrammetrie ifp Digital airborne cameras Status & future Michael Cramer Institute for Photogrammetry, Univ. of Stuttgart Geschwister-Scholl-Str.24, D-70174 Stuttgart Tel: + 49 711 121
Institut für Photogrammetrie ifp Digital airborne cameras Status & future Michael Cramer Institute for Photogrammetry, Univ. of Stuttgart Geschwister-Scholl-Str.24, D-70174 Stuttgart Tel: + 49 711 121
NEXT-GENERATION ACOUSTIC WIND PROFILERS
 15 Height=80 m, N=835, Average 600 s Slope =1.008+/- 0.0007, R 2 =0.998+/-0.0001 σ V / V 0.03 0.025 SODAR wind speed m/s 10 NEXT-GENERATION ACOUSTIC WIND PROFILERS 5 Stuart Bradley 1,2 Sabine Von Hünerbein
15 Height=80 m, N=835, Average 600 s Slope =1.008+/- 0.0007, R 2 =0.998+/-0.0001 σ V / V 0.03 0.025 SODAR wind speed m/s 10 NEXT-GENERATION ACOUSTIC WIND PROFILERS 5 Stuart Bradley 1,2 Sabine Von Hünerbein
If you want to use an inertial measurement system...
 If you want to use an inertial measurement system...... which technical data you should analyse and compare before making your decision by Dr.-Ing. E. v. Hinueber, imar Navigation GmbH Keywords: inertial
If you want to use an inertial measurement system...... which technical data you should analyse and compare before making your decision by Dr.-Ing. E. v. Hinueber, imar Navigation GmbH Keywords: inertial
Mobile Survey of Rail Track and Bed
 Mobile Survey of Rail Track and Bed DOT - FRA December 2, 2008 William J. Herr, MSEE, PE wherr@phnx-sci.com 760.471.5396 Pavement Profile Scanner (PPS) Fast Accurate Available Polygon Scanner Polygonal
Mobile Survey of Rail Track and Bed DOT - FRA December 2, 2008 William J. Herr, MSEE, PE wherr@phnx-sci.com 760.471.5396 Pavement Profile Scanner (PPS) Fast Accurate Available Polygon Scanner Polygonal
Accurate High-Sensitivity GPS for Short Baselines
 Tutorial 3: Positioning and map matching - Part 3: Positioning by multi sensor systems 1 for Short Baselines FIG Working Week TS 6C GPS for Engineering Volker Schwieger University Stuttgart Germany Eilat,
Tutorial 3: Positioning and map matching - Part 3: Positioning by multi sensor systems 1 for Short Baselines FIG Working Week TS 6C GPS for Engineering Volker Schwieger University Stuttgart Germany Eilat,
Inertial Systems. Ekinox Series TACTICAL GRADE MEMS. Motion Sensing & Navigation IMU AHRS MRU INS VG
 Ekinox Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.05 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE EKINOX SERIES R&D specialists usually compromise between high
Ekinox Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.05 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE EKINOX SERIES R&D specialists usually compromise between high
Combining low-cost sonar and high-precision GNSS for river and estuarine bathymetry
 Combining low-cost sonar and high-precision GNSS for river and estuarine bathymetry J.A. Gonçalves, J. Pinheiro, L. Bastos, A. Bio Background Bathymetry surveys are essential to provide data to keep navigation
Combining low-cost sonar and high-precision GNSS for river and estuarine bathymetry J.A. Gonçalves, J. Pinheiro, L. Bastos, A. Bio Background Bathymetry surveys are essential to provide data to keep navigation
NAVIGATION AND REMOTE SENSING PAYLOADS AND METHODS OF THE SARVANT UNMANNED AERIAL SYSTEM
 NAVIGATION AND REMOTE SENSING PAYLOADS AND METHODS OF THE SARVANT UNMANNED AERIAL SYSTEM P. Molina, P. Fortuny, I. Colomina Institute of Geomatics -- Castelldefels (ES) M. Remy, K.A.C. Macedo, Y.R.C. Zúnigo,
NAVIGATION AND REMOTE SENSING PAYLOADS AND METHODS OF THE SARVANT UNMANNED AERIAL SYSTEM P. Molina, P. Fortuny, I. Colomina Institute of Geomatics -- Castelldefels (ES) M. Remy, K.A.C. Macedo, Y.R.C. Zúnigo,
HALS-H1 Ground Surveillance & Targeting Helicopter
 ARATOS-SWISS Homeland Security AG & SMA PROGRESS, LLC HALS-H1 Ground Surveillance & Targeting Helicopter Defense, Emergency, Homeland Security (Border Patrol, Pipeline Monitoring)... Automatic detection
ARATOS-SWISS Homeland Security AG & SMA PROGRESS, LLC HALS-H1 Ground Surveillance & Targeting Helicopter Defense, Emergency, Homeland Security (Border Patrol, Pipeline Monitoring)... Automatic detection
NovAtel s. Performance Analysis October Abstract. SPAN on OEM6. SPAN on OEM6. Enhancements
 NovAtel s SPAN on OEM6 Performance Analysis October 2012 Abstract SPAN, NovAtel s GNSS/INS solution, is now available on the OEM6 receiver platform. In addition to rapid GNSS signal reacquisition performance,
NovAtel s SPAN on OEM6 Performance Analysis October 2012 Abstract SPAN, NovAtel s GNSS/INS solution, is now available on the OEM6 receiver platform. In addition to rapid GNSS signal reacquisition performance,
Ground Control Configuration Analysis for Small Area UAV Imagery Based Mapping
 Ground Control Configuration Analysis for Small Area UAV Imagery Based Mapping ASPRS IGTF 2017, Baltimore, MD March 15 th, 2017 Presenter: David Day, CP, GISP Wes Weaver Keystone Aerial Surveys, Inc. Summary
Ground Control Configuration Analysis for Small Area UAV Imagery Based Mapping ASPRS IGTF 2017, Baltimore, MD March 15 th, 2017 Presenter: David Day, CP, GISP Wes Weaver Keystone Aerial Surveys, Inc. Summary
HIGH-ACCURACY GYROCOMPASS
 HIGH-ACCURACY GYROCOMPASS and INERTIAL NAVIGATION PRODUCTS NAVAL NAVIGATION LAND NAVIGATION & POINTING AIR NAVIGATION COMMERCIAL & INDUSTRIAL GEM elettronica is a leading European supplier in the design,
HIGH-ACCURACY GYROCOMPASS and INERTIAL NAVIGATION PRODUCTS NAVAL NAVIGATION LAND NAVIGATION & POINTING AIR NAVIGATION COMMERCIAL & INDUSTRIAL GEM elettronica is a leading European supplier in the design,
Inertial Sensors. Ellipse Series MINIATURE HIGH PERFORMANCE. Navigation, Motion & Heave Sensing IMU AHRS MRU INS VG
 Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.2 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.2 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Precise Point Positioning (PPP) using
 using") Precise Point Positioning (PPP) using Product Technical Notes // May 2009 OnPOZ is a product line of Effigis. EZSurv is a registered trademark of Effigis. All other trademarks are registered or recognized
Precise Point Positioning (PPP) using Product Technical Notes // May 2009 OnPOZ is a product line of Effigis. EZSurv is a registered trademark of Effigis. All other trademarks are registered or recognized
Surveying in the Year 2020
 Surveying in the Year 2020 Johannes Schwarz Leica Geosystems My first toys 2 1 3 Questions Why is a company like Leica Geosystems constantly developing new surveying products and instruments? What surveying
Surveying in the Year 2020 Johannes Schwarz Leica Geosystems My first toys 2 1 3 Questions Why is a company like Leica Geosystems constantly developing new surveying products and instruments? What surveying
Technical Notes LAND MAPPING APPLICATIONS. Leading the way with increased reliability.
 LAND MAPPING APPLICATIONS Technical Notes Leading the way with increased reliability. Industry-leading post-processing software designed to maximize the accuracy potential of your POS LV (Position and
LAND MAPPING APPLICATIONS Technical Notes Leading the way with increased reliability. Industry-leading post-processing software designed to maximize the accuracy potential of your POS LV (Position and
Overview. Objectives. The ultimate goal is to compare the performance that different equipment offers us in a photogrammetric flight.
 Overview At present, one of the most commonly used technique for topographic surveys is aerial photogrammetry. This technique uses aerial images to determine the geometric properties of objects and spatial
Overview At present, one of the most commonly used technique for topographic surveys is aerial photogrammetry. This technique uses aerial images to determine the geometric properties of objects and spatial
Inertial Sensors. Ellipse 2 Series MINIATURE HIGH PERFORMANCE. Navigation, Motion & Heave Sensing IMU AHRS MRU INS VG
 Ellipse 2 Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Ellipse 2 Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Cooperative navigation: outline
 Positioning and Navigation in GPS-challenged Environments: Cooperative Navigation Concept Dorota A Grejner-Brzezinska, Charles K Toth, Jong-Ki Lee and Xiankun Wang Satellite Positioning and Inertial Navigation
Positioning and Navigation in GPS-challenged Environments: Cooperative Navigation Concept Dorota A Grejner-Brzezinska, Charles K Toth, Jong-Ki Lee and Xiankun Wang Satellite Positioning and Inertial Navigation
Inertial Sensors. Ellipse 2 Series MINIATURE HIGH PERFORMANCE. Navigation, Motion & Heave Sensing IMU AHRS MRU INS VG
 Ellipse 2 Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Ellipse 2 Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
If you want to use an inertial measurement system...
 If you want to use an inertial measurement system...... which technical data you should analyse and compare before making your decision by Dr.-Ing. Edgar v. Hinüber, CEO imar Navigation GmbH Keywords:
If you want to use an inertial measurement system...... which technical data you should analyse and compare before making your decision by Dr.-Ing. Edgar v. Hinüber, CEO imar Navigation GmbH Keywords:
Revisions Revision Date By Changes A 11 Feb 2013 MHA Initial release , Xsens Technologies B.V. All rights reserved. Information in this docum
 MTi 10-series and MTi 100-series Document MT0503P, Revision 0 (DRAFT), 11 Feb 2013 Xsens Technologies B.V. Pantheon 6a P.O. Box 559 7500 AN Enschede The Netherlands phone +31 (0)88 973 67 00 fax +31 (0)88
MTi 10-series and MTi 100-series Document MT0503P, Revision 0 (DRAFT), 11 Feb 2013 Xsens Technologies B.V. Pantheon 6a P.O. Box 559 7500 AN Enschede The Netherlands phone +31 (0)88 973 67 00 fax +31 (0)88
Utilizing Batch Processing for GNSS Signal Tracking
 Utilizing Batch Processing for GNSS Signal Tracking Andrey Soloviev Avionics Engineering Center, Ohio University Presented to: ION Alberta Section, Calgary, Canada February 27, 2007 Motivation: Outline
Utilizing Batch Processing for GNSS Signal Tracking Andrey Soloviev Avionics Engineering Center, Ohio University Presented to: ION Alberta Section, Calgary, Canada February 27, 2007 Motivation: Outline
Inertial Sensors. Ellipse Series MINIATURE HIGH PERFORMANCE. Navigation, Motion & Heave Sensing IMU AHRS MRU INS VG
 Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
UAV Technologies for 3D Mapping. Rolf Schaeppi Director Geospatial Solutions APAC / India
 UAV Technologies for 3D Mapping Rolf Schaeppi Director Geospatial Solutions APAC / India Some main application areas? Market situation Analyst statements billion dollars 7,3 defense market 2,5 civil market
UAV Technologies for 3D Mapping Rolf Schaeppi Director Geospatial Solutions APAC / India Some main application areas? Market situation Analyst statements billion dollars 7,3 defense market 2,5 civil market
Cooperative navigation (part II)
") Cooperative navigation (part II) An example using foot-mounted INS and UWB-transceivers Jouni Rantakokko Aim Increased accuracy during long-term operations in GNSS-challenged environments for - First responders
Cooperative navigation (part II) An example using foot-mounted INS and UWB-transceivers Jouni Rantakokko Aim Increased accuracy during long-term operations in GNSS-challenged environments for - First responders
Inertial Navigation System
 Apogee Marine Series ULTIMATE ACCURACY MEMS Inertial Navigation System INS MRU AHRS ITAR Free 0.005 RMS Navigation, Motion & Heave Sensing APOGEE SERIES makes high accuracy affordable for all surveying
Apogee Marine Series ULTIMATE ACCURACY MEMS Inertial Navigation System INS MRU AHRS ITAR Free 0.005 RMS Navigation, Motion & Heave Sensing APOGEE SERIES makes high accuracy affordable for all surveying
PHINS, An All-In-One Sensor for DP Applications
 DYNAMIC POSITIONING CONFERENCE September 28-30, 2004 Sensors PHINS, An All-In-One Sensor for DP Applications Yves PATUREL IXSea (Marly le Roi, France) ABSTRACT DP positioning sensors are mainly GPS receivers
DYNAMIC POSITIONING CONFERENCE September 28-30, 2004 Sensors PHINS, An All-In-One Sensor for DP Applications Yves PATUREL IXSea (Marly le Roi, France) ABSTRACT DP positioning sensors are mainly GPS receivers
HIGH RESOLUTION COLOR IMAGERY FOR ORTHOMAPS AND REMOTE SENSING. Author: Peter Fricker Director Product Management Image Sensors
 HIGH RESOLUTION COLOR IMAGERY FOR ORTHOMAPS AND REMOTE SENSING Author: Peter Fricker Director Product Management Image Sensors Co-Author: Tauno Saks Product Manager Airborne Data Acquisition Leica Geosystems
HIGH RESOLUTION COLOR IMAGERY FOR ORTHOMAPS AND REMOTE SENSING Author: Peter Fricker Director Product Management Image Sensors Co-Author: Tauno Saks Product Manager Airborne Data Acquisition Leica Geosystems
Including GNSS Based Heading in Inertial Aided GNSS DP Reference System
 Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 9-10, 2012 Sensors II SESSION Including GNSS Based Heading in Inertial Aided GNSS DP Reference System By Arne Rinnan, Nina
Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 9-10, 2012 Sensors II SESSION Including GNSS Based Heading in Inertial Aided GNSS DP Reference System By Arne Rinnan, Nina
A Positon and Orientation Post-Processing Software Package for Land Applications - New Technology
 A Positon and Orientation Post-Processing Software Package for Land Applications - New Technology Tatyana Bourke, Applanix Corporation Abstract This paper describes a post-processing software package that
A Positon and Orientation Post-Processing Software Package for Land Applications - New Technology Tatyana Bourke, Applanix Corporation Abstract This paper describes a post-processing software package that
Geo-localization and Mosaicing System (GEMS): Enabling Precision Image Feature Location and Rapid Mosaicing General:
: Enabling Precision Image Feature Location and Rapid Mosaicing General:") Geo-localization and Mosaicing System (GEMS): Enabling Precision Image Feature Location and Rapid Mosaicing General: info@senteksystems.com www.senteksystems.com 12/6/2014 Precision Agriculture Multi-Spectral
Geo-localization and Mosaicing System (GEMS): Enabling Precision Image Feature Location and Rapid Mosaicing General: info@senteksystems.com www.senteksystems.com 12/6/2014 Precision Agriculture Multi-Spectral
Sampling the World in 3D by Airborne LIDAR Assessing the Information Content of LIDAR Point Clouds
 Sampling the World in 3D by Airborne LIDAR Assessing the Information Content of LIDAR Point Clouds PhoWo 2013 September 11 th, 2013 Stuttgart, Germany Andreas Ullrich RIEGL LMS GmbH sequential data acquisition
Sampling the World in 3D by Airborne LIDAR Assessing the Information Content of LIDAR Point Clouds PhoWo 2013 September 11 th, 2013 Stuttgart, Germany Andreas Ullrich RIEGL LMS GmbH sequential data acquisition
ACCURACY ASSESSMENT OF DIRECT GEOREFERENCING FOR PHOTOGRAMMETRIC APPLICATIONS ON SMALL UNMANNED AERIAL PLATFORMS
 ACCURACY ASSESSMENT OF DIRECT GEOREFERENCING FOR PHOTOGRAMMETRIC APPLICATIONS ON SMALL UNMANNED AERIAL PLATFORMS O. Mian a, J. Lutes a, G. Lipa a, J. J. Hutton a, E. Gavelle b S. Borghini c * a Applanix
ACCURACY ASSESSMENT OF DIRECT GEOREFERENCING FOR PHOTOGRAMMETRIC APPLICATIONS ON SMALL UNMANNED AERIAL PLATFORMS O. Mian a, J. Lutes a, G. Lipa a, J. J. Hutton a, E. Gavelle b S. Borghini c * a Applanix
Micro-Technology for Positioning, Navigation and Timing
 Micro-Technology for Positioning, Navigation and Timing (µpnt) Dr. Program Manager DARPA/MTO Aggregation Overall goal: Enable self-contained chip-scale inertial navigation Reduce SWaP of existing Inertial
Micro-Technology for Positioning, Navigation and Timing (µpnt) Dr. Program Manager DARPA/MTO Aggregation Overall goal: Enable self-contained chip-scale inertial navigation Reduce SWaP of existing Inertial
EXPERIMENTAL TESTS ON FAST AMBIGUITY SOLUTIONS FOR AIRBORNE KINEMATIC GPS POSITIONING
 EXPERIMENTAL TESTS ON FAST AMBIGUITY SOLUTIONS FOR AIRBORNE KINEMATIC GPS POSITIONING Prof. em. Friedrich Ackermann Institute of Photogrammetry University of Stuttgart Keplerstr. 11, 70174 Stuttgart Germany
EXPERIMENTAL TESTS ON FAST AMBIGUITY SOLUTIONS FOR AIRBORNE KINEMATIC GPS POSITIONING Prof. em. Friedrich Ackermann Institute of Photogrammetry University of Stuttgart Keplerstr. 11, 70174 Stuttgart Germany
Assessing & Mitigation of risks on railways operational scenarios
 R H I N O S Railway High Integrity Navigation Overlay System Assessing & Mitigation of risks on railways operational scenarios Rome, June 22 nd 2017 Anja Grosch, Ilaria Martini, Omar Garcia Crespillo (DLR)
R H I N O S Railway High Integrity Navigation Overlay System Assessing & Mitigation of risks on railways operational scenarios Rome, June 22 nd 2017 Anja Grosch, Ilaria Martini, Omar Garcia Crespillo (DLR)
Phase One ixu-rs1000 Accuracy Assessment Report Yu. Raizman, PhaseOne.Industrial, Israel
 17 th International Scientific and Technical Conference FROM IMAGERY TO DIGITAL REALITY: ERS & Photogrammetry Phase One ixu-rs1000 Accuracy Assessment Report Yu. Raizman, PhaseOne.Industrial, Israel 1.
17 th International Scientific and Technical Conference FROM IMAGERY TO DIGITAL REALITY: ERS & Photogrammetry Phase One ixu-rs1000 Accuracy Assessment Report Yu. Raizman, PhaseOne.Industrial, Israel 1.
NEW. Airborne Laser Scanning. Dual Wavelength Waveform Processing Airborne LiDAR Scanning System for High-Point Density Mapping Applications
 Dual Wavelength Waveform Processing Airborne LiDAR Scanning System for High-Point Density Mapping Applications NEW RIEGL VQ-156i-DW enhanced target characterization based upon simultaneous measurements
Dual Wavelength Waveform Processing Airborne LiDAR Scanning System for High-Point Density Mapping Applications NEW RIEGL VQ-156i-DW enhanced target characterization based upon simultaneous measurements
Inertial Systems. Ekinox 2 Series TACTICAL GRADE MEMS. Motion Sensing & Navigation IMU AHRS MRU INS VG
 Ekinox 2 Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.02 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE EKINOX 2 SERIES R&D specialists usually compromise between
Ekinox 2 Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.02 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE EKINOX 2 SERIES R&D specialists usually compromise between
High Precision GNSS in Automotive
 High Precision GNSS in Automotive Jonathan Auld, VP Engineering and Safety 6, March, 2018 2 Global OEM Positioning Solutions and Services for Land, Sea, and Air. GNSS in Automotive Today Today the primary
High Precision GNSS in Automotive Jonathan Auld, VP Engineering and Safety 6, March, 2018 2 Global OEM Positioning Solutions and Services for Land, Sea, and Air. GNSS in Automotive Today Today the primary
Inertial Systems. Ekinox 2 Series TACTICAL GRADE MEMS. Motion Sensing & Navigation IMU AHRS MRU INS VG
 Ekinox 2 Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.02 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE EKINOX 2 SERIES R&D specialists usually compromise between
Ekinox 2 Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.02 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE EKINOX 2 SERIES R&D specialists usually compromise between
ADMA. Automotive Dynamic Motion Analyzer with 1000 Hz. ADMA Applications. State of the art: ADMA GPS/Inertial System for vehicle dynamics testing
 ADMA Automotive Dynamic Motion Analyzer with 1000 Hz State of the art: ADMA GPS/Inertial System for vehicle dynamics testing ADMA Applications The strap-down technology ensures that the ADMA is stable
ADMA Automotive Dynamic Motion Analyzer with 1000 Hz State of the art: ADMA GPS/Inertial System for vehicle dynamics testing ADMA Applications The strap-down technology ensures that the ADMA is stable
Observing the APOD satellite with the AuScope VLBI network
 10 th IVS General Meeting, June 3-8, 2018, Svalbard, Norway Observing the APOD satellite with the AuScope VLBI network Andreas Hellerschmied Johannes Böhm Technische Universität Wien, Austria Lucia McCallum
10 th IVS General Meeting, June 3-8, 2018, Svalbard, Norway Observing the APOD satellite with the AuScope VLBI network Andreas Hellerschmied Johannes Böhm Technische Universität Wien, Austria Lucia McCallum
Webinar. 9 things you should know about centimeter-level GNSS accuracy
 Webinar 9 things you should know about centimeter-level GNSS accuracy Webinar agenda 9 things you should know about centimeter-level GNSS accuracy 1. High precision GNSS challenges 2. u-blox F9 technology
Webinar 9 things you should know about centimeter-level GNSS accuracy Webinar agenda 9 things you should know about centimeter-level GNSS accuracy 1. High precision GNSS challenges 2. u-blox F9 technology
LOCALIZATION WITH GPS UNAVAILABLE
 LOCALIZATION WITH GPS UNAVAILABLE ARES SWIEE MEETING - ROME, SEPT. 26 2014 TOR VERGATA UNIVERSITY Summary Introduction Technology State of art Application Scenarios vs. Technology Advanced Research in
LOCALIZATION WITH GPS UNAVAILABLE ARES SWIEE MEETING - ROME, SEPT. 26 2014 TOR VERGATA UNIVERSITY Summary Introduction Technology State of art Application Scenarios vs. Technology Advanced Research in
Leica ADS80 - Digital Airborne Imaging Solution NAIP, Salt Lake City 4 December 2008
 Luzern, Switzerland, acquired at 5 cm GSD, 2008. Leica ADS80 - Digital Airborne Imaging Solution NAIP, Salt Lake City 4 December 2008 Shawn Slade, Doug Flint and Ruedi Wagner Leica Geosystems AG, Airborne
Luzern, Switzerland, acquired at 5 cm GSD, 2008. Leica ADS80 - Digital Airborne Imaging Solution NAIP, Salt Lake City 4 December 2008 Shawn Slade, Doug Flint and Ruedi Wagner Leica Geosystems AG, Airborne
Dual Channel Waveform Processing Airborne LiDAR Scanning System for High-Point Density and Ultra-Wide Area Mapping
 Dual Channel Waveform Processing Airborne LiDAR Scanning System for High-Point Density and Ultra-Wide Area Mapping RIEGL VQ-156i high laser pulse repetition rate up to 2 MHz up to 1.33 million measurements
Dual Channel Waveform Processing Airborne LiDAR Scanning System for High-Point Density and Ultra-Wide Area Mapping RIEGL VQ-156i high laser pulse repetition rate up to 2 MHz up to 1.33 million measurements
Patented Precision. 8 August US Patent 6,775,914 Can Patent 2,405,133 Other Patents Pending. surpro.com
 Patented Precision 8 August 2014 US Patent 6,775,914 Can Patent 2,405,133 Other Patents Pending surpro.com 1 The New SurPRO 4000 SurPRO comes from words Surface & Profiler Used on roads, structures, runways
Patented Precision 8 August 2014 US Patent 6,775,914 Can Patent 2,405,133 Other Patents Pending surpro.com 1 The New SurPRO 4000 SurPRO comes from words Surface & Profiler Used on roads, structures, runways
Baldwin and Mobile Counties, AL Orthoimagery Project Report. Submitted: March 23, 2016
 2015 Orthoimagery Project Report Submitted: Prepared by: Quantum Spatial, Inc 523 Wellington Way, Suite 375 Lexington, KY 40503 859-277-8700 Page i of iii Contents Project Report 1. Summary / Scope...
2015 Orthoimagery Project Report Submitted: Prepared by: Quantum Spatial, Inc 523 Wellington Way, Suite 375 Lexington, KY 40503 859-277-8700 Page i of iii Contents Project Report 1. Summary / Scope...
Integrated Navigation System
 Integrated Navigation System Adhika Lie adhika@aem.umn.edu AEM 5333: Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles Feb 14, 2013 1 Navigation System Where am I? Position,
Integrated Navigation System Adhika Lie adhika@aem.umn.edu AEM 5333: Design, Build, Model, Simulate, Test and Fly Small Uninhabited Aerial Vehicles Feb 14, 2013 1 Navigation System Where am I? Position,
Trimble Business Center:
 Trimble Business Center: Modernized Approaches for GNSS Baseline Processing Trimble s industry-leading software includes a new dedicated processor for static baselines. The software features dynamic selection
Trimble Business Center: Modernized Approaches for GNSS Baseline Processing Trimble s industry-leading software includes a new dedicated processor for static baselines. The software features dynamic selection
GPS-Aided INS Datasheet Rev. 2.3
 GPS-Aided INS 1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined L1 & L2 GPS, GLONASS, GALILEO and BEIDOU navigation and
GPS-Aided INS 1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined L1 & L2 GPS, GLONASS, GALILEO and BEIDOU navigation and
The survey-grade mapping drone
 The survey-grade mapping drone 3 reasons to choose the ebee RTK 01. Survey-grade accuracy Absolute orthomosaic / Digital Elevation Model accuracy of down to 3 cm (1.2 in) without the need for GCPs meaning
The survey-grade mapping drone 3 reasons to choose the ebee RTK 01. Survey-grade accuracy Absolute orthomosaic / Digital Elevation Model accuracy of down to 3 cm (1.2 in) without the need for GCPs meaning
Navigation System for Microtunneling and Pipejacking N A V 2 4
 Navigation System for Microtunneling and Pipejacking N A V 2 4 Enables horizontally and vertically curved tunnels Supplies precise control information on position - direction - inclination - roll Easy
Navigation System for Microtunneling and Pipejacking N A V 2 4 Enables horizontally and vertically curved tunnels Supplies precise control information on position - direction - inclination - roll Easy
EnsoMOSAIC Aerial mapping tools
 EnsoMOSAIC Aerial mapping tools Jakarta and Kuala Lumpur, 2013 Contents MosaicMill MM Application examples Software introduction System introduction Rikola HS sensor UAV platform examples SW Syst HS UAV
EnsoMOSAIC Aerial mapping tools Jakarta and Kuala Lumpur, 2013 Contents MosaicMill MM Application examples Software introduction System introduction Rikola HS sensor UAV platform examples SW Syst HS UAV
Intelligent Transport Systems and GNSS. ITSNT 2017 ENAC, Toulouse, France 11/ Nobuaki Kubo (TUMSAT)
") Intelligent Transport Systems and GNSS ITSNT 2017 ENAC, Toulouse, France 11/14-17 2017 Nobuaki Kubo (TUMSAT) Contents ITS applications in Japan How can GNSS contribute to ITS? Current performance of GNSS
Intelligent Transport Systems and GNSS ITSNT 2017 ENAC, Toulouse, France 11/14-17 2017 Nobuaki Kubo (TUMSAT) Contents ITS applications in Japan How can GNSS contribute to ITS? Current performance of GNSS
Full Waveform Digitizing, Dual Channel Airborne LiDAR Scanning System for Ultra Wide Area Mapping
 Full Waveform Digitizing, Dual Channel Airborne LiDAR Scanning System for Ultra Wide Area Mapping RIEGL LMS-Q56 high laser pulse repetition rate up to 8 khz digitization electronics for full waveform data
Full Waveform Digitizing, Dual Channel Airborne LiDAR Scanning System for Ultra Wide Area Mapping RIEGL LMS-Q56 high laser pulse repetition rate up to 8 khz digitization electronics for full waveform data
ION ITM Tokyo University of Marine Science and Technology H. Sridhara, N. Kubo, R.Kikuchi
 Single-Frequency Multi-GNSS RTK Positioning for Moving Platform ION ITM 215 215.1.27-29 Tokyo University of Marine Science and Technology H. Sridhara, N. Kubo, R.Kikuchi 1 Agenda Motivation and Background
Single-Frequency Multi-GNSS RTK Positioning for Moving Platform ION ITM 215 215.1.27-29 Tokyo University of Marine Science and Technology H. Sridhara, N. Kubo, R.Kikuchi 1 Agenda Motivation and Background
SPAN Technology System Characteristics and Performance
 SPAN Technology System Characteristics and Performance NovAtel Inc. ABSTRACT The addition of inertial technology to a GPS system provides multiple benefits, including the availability of attitude output
SPAN Technology System Characteristics and Performance NovAtel Inc. ABSTRACT The addition of inertial technology to a GPS system provides multiple benefits, including the availability of attitude output
Aerial efficiency, photogrammetric accuracy
 Aerial efficiency, photogrammetric accuracy Why sensefly 3 reasons to choose the ebee Plus Large coverage for optimal efficiency The ebee Plus can map more square kilometres per flight, than any drone
Aerial efficiency, photogrammetric accuracy Why sensefly 3 reasons to choose the ebee Plus Large coverage for optimal efficiency The ebee Plus can map more square kilometres per flight, than any drone
Pavemetrics. LCMS - 3D road scanning and texture. PAVEMETRICS Systems Inc. 150 Boulevard René-Lévesque Est, Suite 1820 Québec, Québec, CANADA G1R 5B1
 LCMS - 3D road scanning and texture Pavemetrics Vision Technology for Inspection of Transportation Infrastructures PAVEMETRICS Systems Inc. 150 Boulevard René-Lévesque Est, Suite 1820 Québec, Québec, CANADA
LCMS - 3D road scanning and texture Pavemetrics Vision Technology for Inspection of Transportation Infrastructures PAVEMETRICS Systems Inc. 150 Boulevard René-Lévesque Est, Suite 1820 Québec, Québec, CANADA
V2X-Locate Positioning System Whitepaper
 V2X-Locate Positioning System Whitepaper November 8, 2017 www.cohdawireless.com 1 Introduction The most important piece of information any autonomous system must know is its position in the world. This
V2X-Locate Positioning System Whitepaper November 8, 2017 www.cohdawireless.com 1 Introduction The most important piece of information any autonomous system must know is its position in the world. This
NAV CAR Lane-sensitive positioning and navigation for innovative ITS services AMAA, May 31 st, 2012 E. Schoitsch, E. Althammer, R.
 NAV CAR Lane-sensitive positioning and navigation for innovative ITS services AMAA, May 31 st, 2012 E. Schoitsch, E. Althammer, R. Kloibhofer (AIT), R. Spielhofer, M. Reinthaler, P. Nitsche (ÖFPZ), H.
NAV CAR Lane-sensitive positioning and navigation for innovative ITS services AMAA, May 31 st, 2012 E. Schoitsch, E. Althammer, R. Kloibhofer (AIT), R. Spielhofer, M. Reinthaler, P. Nitsche (ÖFPZ), H.
ION GNSS 2011 FILLING IN THE GAPS OF RTK WITH REGIONAL PPP
 ION GNSS 2011 FILLING IN THE GAPS OF RTK WITH REGIONAL PPP SEPTEMBER 22 th, 2011 ION GNSS 2011. PORTLAND, OREGON, USA SESSION F3: PRECISE POSITIONING AND RTK FOR CIVIL APPLICATION C. García A. Mozo P.
ION GNSS 2011 FILLING IN THE GAPS OF RTK WITH REGIONAL PPP SEPTEMBER 22 th, 2011 ION GNSS 2011. PORTLAND, OREGON, USA SESSION F3: PRECISE POSITIONING AND RTK FOR CIVIL APPLICATION C. García A. Mozo P.
9/12/2011. Training Course Remote Sensing Basic Theory & Image Processing Methods September 2011
 Training Course Remote Sensing Basic Theory & Image Processing Methods 19 23 September 2011 Remote Sensing Platforms Michiel Damen (September 2011) damen@itc.nl 1 Overview Platforms & missions aerial surveys
Training Course Remote Sensing Basic Theory & Image Processing Methods 19 23 September 2011 Remote Sensing Platforms Michiel Damen (September 2011) damen@itc.nl 1 Overview Platforms & missions aerial surveys
SONOBOT AUTONOMOUS HYDROGRAPHIC SURVEY VEHICLE PRODUCT INFORMATION GUIDE
 SONOBOT AUTONOMOUS HYDROGRAPHIC SURVEY VEHICLE PRODUCT INFORMATION GUIDE EvoLogics SONOBOT: Autonomous Surface Vehicle for Hydrographic Surveys High Precision Differential GPS for high-accuracy cartography
SONOBOT AUTONOMOUS HYDROGRAPHIC SURVEY VEHICLE PRODUCT INFORMATION GUIDE EvoLogics SONOBOT: Autonomous Surface Vehicle for Hydrographic Surveys High Precision Differential GPS for high-accuracy cartography
Pedestrian Navigation System Using. Shoe-mounted INS. By Yan Li. A thesis submitted for the degree of Master of Engineering (Research)
") Pedestrian Navigation System Using Shoe-mounted INS By Yan Li A thesis submitted for the degree of Master of Engineering (Research) Faculty of Engineering and Information Technology University of Technology,
Pedestrian Navigation System Using Shoe-mounted INS By Yan Li A thesis submitted for the degree of Master of Engineering (Research) Faculty of Engineering and Information Technology University of Technology,
TESTFIELD TRENTO: GEOMETRIC EVALUATION OF VERY HIGH RESOLUTION SATELLITE IMAGERY
 TESTFIELD TRENTO: GEOMETRIC EVALUATION OF VERY HIGH RESOLUTION SATELLITE IMAGERY G. AGUGIAROa, D. POLIb, F. REMONDINOa, 3DOM, 3D Optical Metrology Unit Bruno Kessler Foundation, Trento, Italy a b Vermessung
TESTFIELD TRENTO: GEOMETRIC EVALUATION OF VERY HIGH RESOLUTION SATELLITE IMAGERY G. AGUGIAROa, D. POLIb, F. REMONDINOa, 3DOM, 3D Optical Metrology Unit Bruno Kessler Foundation, Trento, Italy a b Vermessung
670 10/26/17 SSD: 07/14/16, 09/16/17 Page 1 of 6
 SSD: 07/14/16, 09/16/17 Page 1 of 6 S P E C I A L P R O V I S I O N Section MISCELLANEOUS INCIDENTALS Item.822 - GNSS Construction Inspection Equipment Description SAMPLE PROJECT 12345 10/30/17 1.1 Work
SSD: 07/14/16, 09/16/17 Page 1 of 6 S P E C I A L P R O V I S I O N Section MISCELLANEOUS INCIDENTALS Item.822 - GNSS Construction Inspection Equipment Description SAMPLE PROJECT 12345 10/30/17 1.1 Work
RPAS Photogrammetric Mapping Workflow and Accuracy
 RPAS Photogrammetric Mapping Workflow and Accuracy Dr Yincai Zhou & Dr Craig Roberts Surveying and Geospatial Engineering School of Civil and Environmental Engineering, UNSW Background RPAS category and
RPAS Photogrammetric Mapping Workflow and Accuracy Dr Yincai Zhou & Dr Craig Roberts Surveying and Geospatial Engineering School of Civil and Environmental Engineering, UNSW Background RPAS category and
Locata: A New Constellation for High Accuracy Outdoor & Indoor Positioning
 Locata: A New Constellation for High Accuracy Outdoor & Indoor Positioning Chris Rizos, Yong Li, Nonie Politi School of Surveying & Spatial Information Systems University of New South Wales, Sydney, Australia
Locata: A New Constellation for High Accuracy Outdoor & Indoor Positioning Chris Rizos, Yong Li, Nonie Politi School of Surveying & Spatial Information Systems University of New South Wales, Sydney, Australia
Tracking Quality of Low-Cost GNSS-Receivers
 251 Tracking Quality of Low-Cost GNSS-Receivers Johannes LIEBERMANN 1, Gerhard NAVRATIL 2 and Florian KRESSLER 1 1 AustriaTech, Vienna/Austria johannes.liebermann@austriatech.at 2 Vienna University of
251 Tracking Quality of Low-Cost GNSS-Receivers Johannes LIEBERMANN 1, Gerhard NAVRATIL 2 and Florian KRESSLER 1 1 AustriaTech, Vienna/Austria johannes.liebermann@austriatech.at 2 Vienna University of
ENHANCEMENTS IN UAV FLIGHT CONTROL AND SENSOR ORIENTATION
 Heinz Jürgen Przybilla Manfred Bäumker, Alexander Zurhorst ENHANCEMENTS IN UAV FLIGHT CONTROL AND SENSOR ORIENTATION Content Introduction Precise Positioning GNSS sensors and software Inertial and augmentation
Heinz Jürgen Przybilla Manfred Bäumker, Alexander Zurhorst ENHANCEMENTS IN UAV FLIGHT CONTROL AND SENSOR ORIENTATION Content Introduction Precise Positioning GNSS sensors and software Inertial and augmentation
MEMS Test & Reliability Conference. Dynamic Product Performance Testing of Capacitive MEMS Elements at Wafer Level
 MEMS Test & Reliability Conference Dynamic Product Performance Testing of Capacitive MEMS Elements at Wafer Level Solidus Technologies Abstract Testing the electro/mechanical behavior of capacitive MEMS
MEMS Test & Reliability Conference Dynamic Product Performance Testing of Capacitive MEMS Elements at Wafer Level Solidus Technologies Abstract Testing the electro/mechanical behavior of capacitive MEMS
Sensor Fusion for Navigation in Degraded Environements
 Sensor Fusion for Navigation in Degraded Environements David M. Bevly Professor Director of the GPS and Vehicle Dynamics Lab dmbevly@eng.auburn.edu (334) 844-3446 GPS and Vehicle Dynamics Lab Auburn University
Sensor Fusion for Navigation in Degraded Environements David M. Bevly Professor Director of the GPS and Vehicle Dynamics Lab dmbevly@eng.auburn.edu (334) 844-3446 GPS and Vehicle Dynamics Lab Auburn University
3DM-GX4-45 LORD DATASHEET. GPS-Aided Inertial Navigation System (GPS/INS) Product Highlights. Features and Benefits. Applications
 Product Highlights. Features and Benefits. Applications") LORD DATASHEET 3DM-GX4-45 GPS-Aided Inertial Navigation System (GPS/INS) Product Highlights High performance integd GPS receiver and MEMS sensor technology provide direct and computed PVA outputs in a
LORD DATASHEET 3DM-GX4-45 GPS-Aided Inertial Navigation System (GPS/INS) Product Highlights High performance integd GPS receiver and MEMS sensor technology provide direct and computed PVA outputs in a
GEO 428: DEMs from GPS, Imagery, & Lidar Tuesday, September 11
 GEO 428: DEMs from GPS, Imagery, & Lidar Tuesday, September 11 Global Positioning Systems GPS is a technology that provides Location coordinates Elevation For any location with a decent view of the sky
GEO 428: DEMs from GPS, Imagery, & Lidar Tuesday, September 11 Global Positioning Systems GPS is a technology that provides Location coordinates Elevation For any location with a decent view of the sky