Single-view Metrology and Cameras
|
|
|
- Angelica Woods
- 6 years ago
- Views:
Transcription

1 Single-view Metrology and Cameras 10/10/17 Computational Photography Derek Hoiem, University of Illinois
2 Project 2 Results Incomplete list of great project pages Haohang Huang: Best presented project; nice iterative results and demonstration, animations for hole filling Xiaotian Le: Runner Up Project: Cool Sliding Window to demonstrate difference in textures (most liked) Xiaoyan Wang: Runner Up Project: Cool QR Code Texture Transfer and Toast results Kartik Agarwal: Overall nice project Ho Yin Au: Nice seam finding results Yuanzhe Rijn Bian: Nice Einstein Toast Result Yundi Fei: Nice seam finding results Zih Siou Hung: Nice Van Gogh texture transfer onto a cat Brendan Wilson (synthesized pattern): Very unique texture patterns that were explored Zexuan Zhong: Best hole filling exploration


3 Texture synthesis Brendan Wilson


4 Texture synthesis Brendan Wilson


5 Texture transfer Zih Siou Hung


6 Hole filling Zexuan Zhong
7 Review: Pinhole Camera Optical Center (u. 0, v 0 ) f Z Y.. P X Y Z. u v u p v Camera Center (t x, t y, t z )
8 Review: Projection Matrix Z Y X t r r r t r r r t r r r v f u s f v u w z y x X t x K R O w i w k w j w t R
9 Take-home questions from last week Suppose the camera axis is in the direction of (x=0, y=0, z=1) in its own coordinate system. What is the camera axis in world coordinates given the extrinsic parameters R, t Suppose a camera at height y=h (x=0,z=0) observes a point at (u,v) known to be on the ground (y=0). Assume R is identity. What is the 3D position of the point in terms of f, u 0, v 0?
10 Slide from Efros, Photo from Criminisi Review: Vanishing Points Vertical vanishing point (at infinity) Vanishing line Vanishing point Vanishing point

11 Perspective and weak perspective Photo credit: GazetteLive.co.uk
12 This class How can we calibrate the camera? How can we measure the size of objects in the world from an image? What about other camera properties: focal length, field of view, depth of field, aperture, f-number? How to do focus stacking to get a sharp picture of a nearby object How the vertigo effect works
13 How to calibrate the camera? 1 * * * * * * * * * * * * Z Y X w wv wu X t x K R
14 Calibrating the Camera Method 1: Use an object (calibration grid) with known geometry Correspond image points to 3d points Get least squares solution (or non-linear solution) wu wv w m m m m m m m m m m m m X Y Z 1
 Vanishing point")
15 Calibrating the Camera Method 2: Use vanishing points Find vanishing points corresponding to orthogonal directions Vanishing line Vertical vanishing point (at infinity) Vanishing point Vanishing point
 The transpose of the rotation matrix is its inverse Use the fact that the 3D directions are orthogonal 2) How to recover the rotation matrix that is aligned with the")
16 Take-home question (for later) Suppose you have estimated finite three vanishing points corresponding to orthogonal directions: 1) How to solve for intrinsic matrix? (assume K has three parameters) The transpose of the rotation matrix is its inverse Use the fact that the 3D directions are orthogonal 2) How to recover the rotation matrix that is aligned with the 3D axes defined by these points? In homogeneous coordinates, 3d point at infinity is (X, Y, Z, 0) VP y VP x. VP z Photo from online Tate collection

17 How can we measure the size of 3D objects from an image? Slide by Steve Seitz
18 Perspective cues Slide by Steve Seitz
19 Perspective cues Slide by Steve Seitz
20 Perspective cues Slide by Steve Seitz
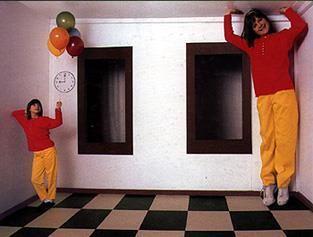
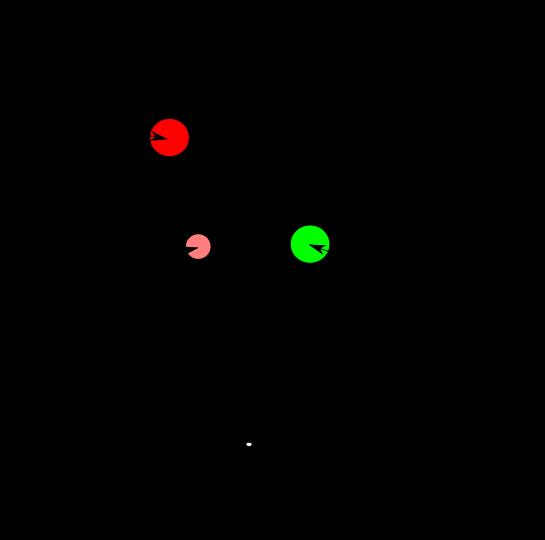
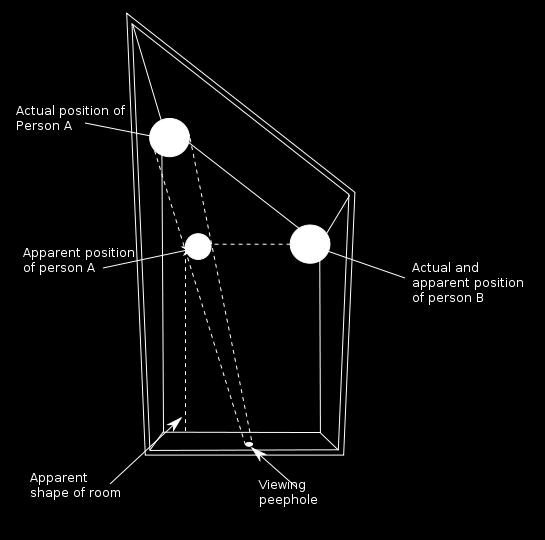
21 Ames Room
22 Comparing heights Slide by Steve Seitz Vanishing Point
23 Measuring height Slide by Steve Seitz Camera height
24 Two views of a scene Parallel to ground camera center Image horizon image plane ground camera looks down slight foreshortening due to camera angle

25 Which is higher the camera or the parachute?
26 Measuring height without a giant ruler Slide by Steve Seitz C Z ground plane Compute Z from image measurements Need a reference object
27 The cross ratio A Projective Invariant Something that does not change under projective transformations (including perspective projection) P 1 P 2 P 3 P P P P P P P P P The cross-ratio of 4 collinear points Can permute the point ordering 4! = 24 different orders (but only 6 distinct values) This is the fundamental invariant of projective geometry 1 i i i i Z Y X P P P P P P P P P Slide by Steve Seitz
28 v Z r t b t v r b r v t b Z Z image cross ratio Measuring height B (bottom of object) T (top of object) R (reference point) ground plane H C T R B R T B scene cross ratio 1 Z Y X P 1 y x p scene points represented as image points as R H R H R Slide by Steve Seitz
29 Measuring height v z r Slide by Steve Seitz vanishing line (horizon) v x v t 0 H t R H v y b 0 t b r b v v Z Z r t image cross ratio b

30 Measuring height v z r Slide by Steve Seitz vanishing line (horizon) t 0 v x t 0 v v y m 0 t 1 b 0 b 1 What if the point on the ground plane b 0 is not known? Here the guy is standing on the box, height of box is known Use one side of the box to help find b 0 as shown above b

31 Take-home question Assume that the man is 6 ft tall What is the height of the front of the building? What is the height of the camera?
32 Beyond the pinhole: What about focus, aperture, DOF, FOV, etc? Optical Center (u. 0, v 0 ) f Z Y.. P X Y Z. u v u p v Camera Center (t x, t y, t z )
33 Adding a lens circle of confusion A lens focuses light onto the film There is a specific distance at which objects are in focus other points project to a circle of confusion in the image Changing the shape of the lens changes this distance
34 Focal length, aperture, depth of field F optical center (Center Of Projection) focal point A lens focuses parallel rays onto a single focal point focal point at a distance f beyond the plane of the lens Aperture of diameter D restricts the range of rays Slide source: Seitz
35 The eye The human eye is a camera Iris - colored annulus with radial muscles Pupil - the hole (aperture) whose size is controlled by the iris
36 Focus with lenses Distance to object Distance to sensor Lens focal length Equation for objects in focus Source:
")

37 The aperture and depth of field Slide source: Seitz f / 5.6 f / 32 Changing the aperture size or focusing distance affects depth of field f-number (f/#) =focal_length / aperture_diameter (e.g., f/16 means that the focal length is 16 times the diameter) When you change the f-number, you are changing the aperture Flower images from Wikipedia

38 Large aperture = small DOF Small aperture = large DOF Varying the aperture Slide from Efros
39 Shrinking the aperture Why not make the aperture as small as possible? Less light gets through Diffraction effects Slide by Steve Seitz
40 Shrinking the aperture Slide by Steve Seitz
41 The Photographer s Great Compromise What we want More spatial resolution Broader field of view More depth of field How we get it Increase focal length Decrease focal length Decrease aperture Increase aperture Cost Light, FOV DOF Light DOF More temporal resolution Shorten exposure Lengthen exposure Light Temporal Res More light
42 Difficulty in macro (close-up) photography For close objects, we have a small relative DOF Can only shrink aperture so far How to get both bugs in focus?
43 Solution: Focus stacking 1. Take pictures with varying focal length Example from

44 Solution: Focus stacking 1. Take pictures with varying focal length 2. Combine
45 Focus stacking
46 Focus stacking How to combine? Web answer: With software (Photoshop, CombineZM) How to do it automatically?
47 Focus stacking How to combine? 1. Align images (e.g., using corresponding points) 2. Two ideas a) Mask regions by hand and combine with pyramid blend b) Gradient domain fusion (mixed gradient) without masking Automatic solution would make an interesting final project Recommended Reading: y/workflow.htm#focus%20stacking
48 Relation between field of view and focal length Field of view (angle width) fov 2tan 1 d 2 f Film/Sensor Width Focal length

49 Dolly Zoom or Vertigo Effect How is this done? Zoom in while moving away
50 Dolly zoom (or Vertigo effect ) Field of view (angle width) fov 2 tan 1 d 2 f Film/Sensor Width Focal length 2 tan 2 fov width distance width of object Distance between object and camera
51 Things to remember Can calibrate using grid or VP Can measure relative sizes using VP Effects of focal length, aperture + tricks
52 Next class Go over take-home questions from today Single-view 3D Reconstruction
Unit 1: Image Formation
 Unit 1: Image Formation 1. Geometry 2. Optics 3. Photometry 4. Sensor Readings Szeliski 2.1-2.3 & 6.3.5 1 Physical parameters of image formation Geometric Type of projection Camera pose Optical Sensor
Unit 1: Image Formation 1. Geometry 2. Optics 3. Photometry 4. Sensor Readings Szeliski 2.1-2.3 & 6.3.5 1 Physical parameters of image formation Geometric Type of projection Camera pose Optical Sensor
Projection. Readings. Szeliski 2.1. Wednesday, October 23, 13
 Projection Readings Szeliski 2.1 Projection Readings Szeliski 2.1 Müller-Lyer Illusion by Pravin Bhat Müller-Lyer Illusion by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html Müller-Lyer
Projection Readings Szeliski 2.1 Projection Readings Szeliski 2.1 Müller-Lyer Illusion by Pravin Bhat Müller-Lyer Illusion by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html Müller-Lyer
How do we see the world?
 The Camera 1 How do we see the world? Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable image? Credit: Steve Seitz 2 Pinhole camera Idea 2: Add a barrier to
The Camera 1 How do we see the world? Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable image? Credit: Steve Seitz 2 Pinhole camera Idea 2: Add a barrier to
The Camera : Computational Photography Alexei Efros, CMU, Fall 2008
 The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
Projection. Projection. Image formation. Müller-Lyer Illusion. Readings. Readings. Let s design a camera. Szeliski 2.1. Szeliski 2.
 Projection Projection Readings Szeliski 2.1 Readings Szeliski 2.1 Müller-Lyer Illusion Image formation object film by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html Let s design a camera
Projection Projection Readings Szeliski 2.1 Readings Szeliski 2.1 Müller-Lyer Illusion Image formation object film by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html Let s design a camera
IMAGE FORMATION. Light source properties. Sensor characteristics Surface. Surface reflectance properties. Optics
 IMAGE FORMATION Light source properties Sensor characteristics Surface Exposure shape Optics Surface reflectance properties ANALOG IMAGES An image can be understood as a 2D light intensity function f(x,y)
IMAGE FORMATION Light source properties Sensor characteristics Surface Exposure shape Optics Surface reflectance properties ANALOG IMAGES An image can be understood as a 2D light intensity function f(x,y)
Two strategies for realistic rendering capture real world data synthesize from bottom up
 Recap from Wednesday Two strategies for realistic rendering capture real world data synthesize from bottom up Both have existed for 500 years. Both are successful. Attempts to take the best of both world
Recap from Wednesday Two strategies for realistic rendering capture real world data synthesize from bottom up Both have existed for 500 years. Both are successful. Attempts to take the best of both world
The Camera : Computational Photography Alexei Efros, CMU, Fall 2005
 The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
The Camera 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 How do we see the world? object film Let s design a camera Idea 1: put a piece of film in front of an object Do we get a reasonable
Building a Real Camera. Slides Credit: Svetlana Lazebnik
 Building a Real Camera Slides Credit: Svetlana Lazebnik Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible?
Building a Real Camera Slides Credit: Svetlana Lazebnik Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible?
Projection. Announcements. Müller-Lyer Illusion. Image formation. Readings Nalwa 2.1
 Announcements Mailing list (you should have received messages) Project 1 additional test sequences online Projection Readings Nalwa 2.1 Müller-Lyer Illusion Image formation object film by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html
Announcements Mailing list (you should have received messages) Project 1 additional test sequences online Projection Readings Nalwa 2.1 Müller-Lyer Illusion Image formation object film by Pravin Bhat http://www.michaelbach.de/ot/sze_muelue/index.html
Building a Real Camera
 Building a Real Camera Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible? Less light gets through Diffraction
Building a Real Camera Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible? Less light gets through Diffraction
Cameras. CSE 455, Winter 2010 January 25, 2010
 Cameras CSE 455, Winter 2010 January 25, 2010 Announcements New Lecturer! Neel Joshi, Ph.D. Post-Doctoral Researcher Microsoft Research neel@cs Project 1b (seam carving) was due on Friday the 22 nd Project
Cameras CSE 455, Winter 2010 January 25, 2010 Announcements New Lecturer! Neel Joshi, Ph.D. Post-Doctoral Researcher Microsoft Research neel@cs Project 1b (seam carving) was due on Friday the 22 nd Project
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 4a: Cameras Source: S. Lazebnik Reading Szeliski chapter 2.2.3, 2.3 Image formation Let s design a camera Idea 1: put a piece of film in front of an object
CS6670: Computer Vision Noah Snavely Lecture 4a: Cameras Source: S. Lazebnik Reading Szeliski chapter 2.2.3, 2.3 Image formation Let s design a camera Idea 1: put a piece of film in front of an object
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 5: Cameras and Projection Szeliski 2.1.3-2.1.6 Reading Announcements Project 1 assigned, see projects page: http://www.cs.cornell.edu/courses/cs6670/2011sp/projects/projects.html
CS6670: Computer Vision Noah Snavely Lecture 5: Cameras and Projection Szeliski 2.1.3-2.1.6 Reading Announcements Project 1 assigned, see projects page: http://www.cs.cornell.edu/courses/cs6670/2011sp/projects/projects.html
Lecture 02 Image Formation 1
 Institute of Informatics Institute of Neuroinformatics Lecture 02 Image Formation 1 Davide Scaramuzza http://rpg.ifi.uzh.ch 1 Lab Exercise 1 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work
Institute of Informatics Institute of Neuroinformatics Lecture 02 Image Formation 1 Davide Scaramuzza http://rpg.ifi.uzh.ch 1 Lab Exercise 1 - Today afternoon Room ETH HG E 1.1 from 13:15 to 15:00 Work
Overview. Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image
 Camera & Color Overview Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image Book: Hartley 6.1, Szeliski 2.1.5, 2.2, 2.3 The trip
Camera & Color Overview Pinhole camera model Projective geometry Vanishing points and lines Projection matrix Cameras with Lenses Color Digital image Book: Hartley 6.1, Szeliski 2.1.5, 2.2, 2.3 The trip
Computer Vision. The Pinhole Camera Model
 Computer Vision The Pinhole Camera Model Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2017/2018 Imaging device
Computer Vision The Pinhole Camera Model Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2017/2018 Imaging device
CSE 473/573 Computer Vision and Image Processing (CVIP)
") CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 4 Image formation(part I) Schedule Last class linear algebra overview Today Image formation and camera properties
CSE 473/573 Computer Vision and Image Processing (CVIP) Ifeoma Nwogu inwogu@buffalo.edu Lecture 4 Image formation(part I) Schedule Last class linear algebra overview Today Image formation and camera properties
Image Formation. Dr. Gerhard Roth. COMP 4102A Winter 2015 Version 3
 Image Formation Dr. Gerhard Roth COMP 4102A Winter 2015 Version 3 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
Image Formation Dr. Gerhard Roth COMP 4102A Winter 2015 Version 3 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
Cameras. Digital Visual Effects, Spring 2008 Yung-Yu Chuang 2008/2/26. with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros
 Cameras Digital Visual Effects, Spring 2008 Yung-Yu Chuang 2008/2/26 with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros Camera trial #1 scene film Put a piece of film in front of
Cameras Digital Visual Effects, Spring 2008 Yung-Yu Chuang 2008/2/26 with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros Camera trial #1 scene film Put a piece of film in front of
Cameras. Shrinking the aperture. Camera trial #1. Pinhole camera. Digital Visual Effects Yung-Yu Chuang. Put a piece of film in front of an object.
 Camera trial #1 Cameras Digital Visual Effects Yung-Yu Chuang scene film with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros Put a piece of film in front of an object. Pinhole camera
Camera trial #1 Cameras Digital Visual Effects Yung-Yu Chuang scene film with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros Put a piece of film in front of an object. Pinhole camera
Image formation - Cameras. Grading & Project. About the course. Tentative Schedule. Course Content. Students introduction
 About the course Instructors: Haibin Ling (hbling@temple, Wachman 35) Hours Lecture: Tuesda 5:3-8:pm, TTLMAN 43B Office hour: Tuesda 3: - 5:pm, or b appointment Textbook Computer Vision: Models, Learning,
About the course Instructors: Haibin Ling (hbling@temple, Wachman 35) Hours Lecture: Tuesda 5:3-8:pm, TTLMAN 43B Office hour: Tuesda 3: - 5:pm, or b appointment Textbook Computer Vision: Models, Learning,
6.098 Digital and Computational Photography Advanced Computational Photography. Bill Freeman Frédo Durand MIT - EECS
 6.098 Digital and Computational Photography 6.882 Advanced Computational Photography Bill Freeman Frédo Durand MIT - EECS Administrivia PSet 1 is out Due Thursday February 23 Digital SLR initiation? During
6.098 Digital and Computational Photography 6.882 Advanced Computational Photography Bill Freeman Frédo Durand MIT - EECS Administrivia PSet 1 is out Due Thursday February 23 Digital SLR initiation? During
Image Processing & Projective geometry
 Image Processing & Projective geometry Arunkumar Byravan Partial slides borrowed from Jianbo Shi & Steve Seitz Color spaces RGB Red, Green, Blue HSV Hue, Saturation, Value Why HSV? HSV separates luma,
Image Processing & Projective geometry Arunkumar Byravan Partial slides borrowed from Jianbo Shi & Steve Seitz Color spaces RGB Red, Green, Blue HSV Hue, Saturation, Value Why HSV? HSV separates luma,
LENSES. INEL 6088 Computer Vision
 LENSES INEL 6088 Computer Vision Digital camera A digital camera replaces film with a sensor array Each cell in the array is a Charge Coupled Device light-sensitive diode that converts photons to electrons
LENSES INEL 6088 Computer Vision Digital camera A digital camera replaces film with a sensor array Each cell in the array is a Charge Coupled Device light-sensitive diode that converts photons to electrons
Dr F. Cuzzolin 1. September 29, 2015
 P00407 Principles of Computer Vision 1 1 Department of Computing and Communication Technologies Oxford Brookes University, UK September 29, 2015 September 29, 2015 1 / 73 Outline of the Lecture 1 2 Basics
P00407 Principles of Computer Vision 1 1 Department of Computing and Communication Technologies Oxford Brookes University, UK September 29, 2015 September 29, 2015 1 / 73 Outline of the Lecture 1 2 Basics
CSE 527: Introduction to Computer Vision
 CSE 527: Introduction to Computer Vision Week 2 - Class 2: Vision, Physics, Cameras September 7th, 2017 Today Physics Human Vision Eye Brain Perspective Projection Camera Models Image Formation Digital
CSE 527: Introduction to Computer Vision Week 2 - Class 2: Vision, Physics, Cameras September 7th, 2017 Today Physics Human Vision Eye Brain Perspective Projection Camera Models Image Formation Digital
Image Formation III Chapter 1 (Forsyth&Ponce) Cameras Lenses & Sensors
 Cameras Lenses & Sensors") Image Formation III Chapter 1 (Forsyth&Ponce) Cameras Lenses & Sensors Guido Gerig CS-GY 6643, Spring 2017 (slides modified from Marc Pollefeys, UNC Chapel Hill/ ETH Zurich, With content from Prof. Trevor
Image Formation III Chapter 1 (Forsyth&Ponce) Cameras Lenses & Sensors Guido Gerig CS-GY 6643, Spring 2017 (slides modified from Marc Pollefeys, UNC Chapel Hill/ ETH Zurich, With content from Prof. Trevor
Midterm Examination CS 534: Computational Photography
 Midterm Examination CS 534: Computational Photography November 3, 2015 NAME: SOLUTIONS Problem Score Max Score 1 8 2 8 3 9 4 4 5 3 6 4 7 6 8 13 9 7 10 4 11 7 12 10 13 9 14 8 Total 100 1 1. [8] What are
Midterm Examination CS 534: Computational Photography November 3, 2015 NAME: SOLUTIONS Problem Score Max Score 1 8 2 8 3 9 4 4 5 3 6 4 7 6 8 13 9 7 10 4 11 7 12 10 13 9 14 8 Total 100 1 1. [8] What are
Modeling and Synthesis of Aperture Effects in Cameras
 Modeling and Synthesis of Aperture Effects in Cameras Douglas Lanman, Ramesh Raskar, and Gabriel Taubin Computational Aesthetics 2008 20 June, 2008 1 Outline Introduction and Related Work Modeling Vignetting
Modeling and Synthesis of Aperture Effects in Cameras Douglas Lanman, Ramesh Raskar, and Gabriel Taubin Computational Aesthetics 2008 20 June, 2008 1 Outline Introduction and Related Work Modeling Vignetting
Cameras. Outline. Pinhole camera. Camera trial #1. Pinhole camera Film camera Digital camera Video camera
 Outline Cameras Pinhole camera Film camera Digital camera Video camera Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/3/6 with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros
Outline Cameras Pinhole camera Film camera Digital camera Video camera Digital Visual Effects, Spring 2007 Yung-Yu Chuang 2007/3/6 with slides by Fredo Durand, Brian Curless, Steve Seitz and Alexei Efros
6.A44 Computational Photography
 Add date: Friday 6.A44 Computational Photography Depth of Field Frédo Durand We allow for some tolerance What happens when we close the aperture by two stop? Aperture diameter is divided by two is doubled
Add date: Friday 6.A44 Computational Photography Depth of Field Frédo Durand We allow for some tolerance What happens when we close the aperture by two stop? Aperture diameter is divided by two is doubled
MEM: Intro to Robotics. Assignment 3I. Due: Wednesday 10/15 11:59 EST
 MEM: Intro to Robotics Assignment 3I Due: Wednesday 10/15 11:59 EST 1. Basic Optics You are shopping for a new lens for your Canon D30 digital camera and there are lots of lens options at the store. Your
MEM: Intro to Robotics Assignment 3I Due: Wednesday 10/15 11:59 EST 1. Basic Optics You are shopping for a new lens for your Canon D30 digital camera and there are lots of lens options at the store. Your
Computational Photography and Video. Prof. Marc Pollefeys
 Computational Photography and Video Prof. Marc Pollefeys Today s schedule Introduction of Computational Photography Course facts Syllabus Digital Photography What is computational photography Convergence
Computational Photography and Video Prof. Marc Pollefeys Today s schedule Introduction of Computational Photography Course facts Syllabus Digital Photography What is computational photography Convergence
Dynamically Reparameterized Light Fields & Fourier Slice Photography. Oliver Barth, 2009 Max Planck Institute Saarbrücken
 Dynamically Reparameterized Light Fields & Fourier Slice Photography Oliver Barth, 2009 Max Planck Institute Saarbrücken Background What we are talking about? 2 / 83 Background What we are talking about?
Dynamically Reparameterized Light Fields & Fourier Slice Photography Oliver Barth, 2009 Max Planck Institute Saarbrücken Background What we are talking about? 2 / 83 Background What we are talking about?
Using Optics to Optimize Your Machine Vision Application
 Expert Guide Using Optics to Optimize Your Machine Vision Application Introduction The lens is responsible for creating sufficient image quality to enable the vision system to extract the desired information
Expert Guide Using Optics to Optimize Your Machine Vision Application Introduction The lens is responsible for creating sufficient image quality to enable the vision system to extract the desired information
Cameras and Sensors. Today. Today. It receives light from all directions. BIL721: Computational Photography! Spring 2015, Lecture 2!
 !! Cameras and Sensors Today Pinhole camera! Lenses! Exposure! Sensors! photo by Abelardo Morell BIL721: Computational Photography! Spring 2015, Lecture 2! Aykut Erdem! Hacettepe University! Computer Vision
!! Cameras and Sensors Today Pinhole camera! Lenses! Exposure! Sensors! photo by Abelardo Morell BIL721: Computational Photography! Spring 2015, Lecture 2! Aykut Erdem! Hacettepe University! Computer Vision
Cameras. Steve Rotenberg CSE168: Rendering Algorithms UCSD, Spring 2017
 Cameras Steve Rotenberg CSE168: Rendering Algorithms UCSD, Spring 2017 Camera Focus Camera Focus So far, we have been simulating pinhole cameras with perfect focus Often times, we want to simulate more
Cameras Steve Rotenberg CSE168: Rendering Algorithms UCSD, Spring 2017 Camera Focus Camera Focus So far, we have been simulating pinhole cameras with perfect focus Often times, we want to simulate more
Dappled Photography: Mask Enhanced Cameras for Heterodyned Light Fields and Coded Aperture Refocusing
 Dappled Photography: Mask Enhanced Cameras for Heterodyned Light Fields and Coded Aperture Refocusing Ashok Veeraraghavan, Ramesh Raskar, Ankit Mohan & Jack Tumblin Amit Agrawal, Mitsubishi Electric Research
Dappled Photography: Mask Enhanced Cameras for Heterodyned Light Fields and Coded Aperture Refocusing Ashok Veeraraghavan, Ramesh Raskar, Ankit Mohan & Jack Tumblin Amit Agrawal, Mitsubishi Electric Research
Physics 3340 Spring Fourier Optics
 Physics 3340 Spring 011 Purpose Fourier Optics In this experiment we will show how the Fraunhofer diffraction pattern or spatial Fourier transform of an object can be observed within an optical system.
Physics 3340 Spring 011 Purpose Fourier Optics In this experiment we will show how the Fraunhofer diffraction pattern or spatial Fourier transform of an object can be observed within an optical system.
Reading. Angel. Chapter 5. Optional
 Projections Reading Angel. Chapter 5 Optional David F. Rogers and J. Alan Adams, Mathematical Elements for Computer Graphics, Second edition, McGraw-Hill, New York, 1990, Chapter 3. The 3D synthetic camera
Projections Reading Angel. Chapter 5 Optional David F. Rogers and J. Alan Adams, Mathematical Elements for Computer Graphics, Second edition, McGraw-Hill, New York, 1990, Chapter 3. The 3D synthetic camera
OPTICS I LENSES AND IMAGES
 APAS Laboratory Optics I OPTICS I LENSES AND IMAGES If at first you don t succeed try, try again. Then give up- there s no sense in being foolish about it. -W.C. Fields SYNOPSIS: In Optics I you will learn
APAS Laboratory Optics I OPTICS I LENSES AND IMAGES If at first you don t succeed try, try again. Then give up- there s no sense in being foolish about it. -W.C. Fields SYNOPSIS: In Optics I you will learn
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Sensors and Image Formation Imaging sensors and models of image formation Coordinate systems Digital
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Sensors and Image Formation Imaging sensors and models of image formation Coordinate systems Digital
To Do. Advanced Computer Graphics. Outline. Computational Imaging. How do we see the world? Pinhole camera
 Advanced Computer Graphics CSE 163 [Spring 2017], Lecture 14 Ravi Ramamoorthi http://www.cs.ucsd.edu/~ravir To Do Assignment 2 due May 19 Any last minute issues or questions? Next two lectures: Imaging,
Advanced Computer Graphics CSE 163 [Spring 2017], Lecture 14 Ravi Ramamoorthi http://www.cs.ucsd.edu/~ravir To Do Assignment 2 due May 19 Any last minute issues or questions? Next two lectures: Imaging,
Phys 531 Lecture 9 30 September 2004 Ray Optics II. + 1 s i. = 1 f
 Phys 531 Lecture 9 30 September 2004 Ray Optics II Last time, developed idea of ray optics approximation to wave theory Introduced paraxial approximation: rays with θ 1 Will continue to use Started disussing
Phys 531 Lecture 9 30 September 2004 Ray Optics II Last time, developed idea of ray optics approximation to wave theory Introduced paraxial approximation: rays with θ 1 Will continue to use Started disussing
Lecture 2 Camera Models
 Lecture 2 Camera Models Professor Silvio Savarese Computational Vision and Geometr Lab Silvio Savarese Lecture 2-4-Jan-4 Announcements Prerequisites: an questions? This course requires knowledge of linear
Lecture 2 Camera Models Professor Silvio Savarese Computational Vision and Geometr Lab Silvio Savarese Lecture 2-4-Jan-4 Announcements Prerequisites: an questions? This course requires knowledge of linear
Announcement A total of 5 (five) late days are allowed for projects. Office hours
 late days are allowed for projects. Office hours") Announcement A total of 5 (five) late days are allowed for projects. Office hours Me: 3:50-4:50pm Thursday (or by appointment) Jake: 12:30-1:30PM Monday and Wednesday Image Formation Digital Camera Film
Announcement A total of 5 (five) late days are allowed for projects. Office hours Me: 3:50-4:50pm Thursday (or by appointment) Jake: 12:30-1:30PM Monday and Wednesday Image Formation Digital Camera Film
Aperture & ƒ/stop Worksheet
 Tools and Program Needed: Digital C. Computer USB Drive Bridge PhotoShop Name: Manipulating Depth-of-Field Aperture & stop Worksheet The aperture setting (AV on the dial) is a setting to control the amount
Tools and Program Needed: Digital C. Computer USB Drive Bridge PhotoShop Name: Manipulating Depth-of-Field Aperture & stop Worksheet The aperture setting (AV on the dial) is a setting to control the amount
Aperture and Digi scoping. Thoughts on the value of the aperture of a scope digital camera combination.
 Aperture and Digi scoping. Thoughts on the value of the aperture of a scope digital camera combination. Before entering the heart of the matter, let s do a few reminders. 1. Entrance pupil. It is the image
Aperture and Digi scoping. Thoughts on the value of the aperture of a scope digital camera combination. Before entering the heart of the matter, let s do a few reminders. 1. Entrance pupil. It is the image
Basic principles of photography. David Capel 346B IST
 Basic principles of photography David Capel 346B IST Latin Camera Obscura = Dark Room Light passing through a small hole produces an inverted image on the opposite wall Safely observing the solar eclipse
Basic principles of photography David Capel 346B IST Latin Camera Obscura = Dark Room Light passing through a small hole produces an inverted image on the opposite wall Safely observing the solar eclipse
Douglas Photo. Version for iosand Android
 Douglas Photo Calculator Version 3.2.4 for iosand Android Douglas Software 2007-2017 Contents Introduction... 1 Installation... 2 Running the App... 3 Example Calculations... 5 Photographic Definitions...
Douglas Photo Calculator Version 3.2.4 for iosand Android Douglas Software 2007-2017 Contents Introduction... 1 Installation... 2 Running the App... 3 Example Calculations... 5 Photographic Definitions...
Types of lenses. Shown below are various types of lenses, both converging and diverging.
 Types of lenses Shown below are various types of lenses, both converging and diverging. Any lens that is thicker at its center than at its edges is a converging lens with positive f; and any lens that
Types of lenses Shown below are various types of lenses, both converging and diverging. Any lens that is thicker at its center than at its edges is a converging lens with positive f; and any lens that
Understanding Focal Length
 JANUARY 19, 2018 BEGINNER Understanding Focal Length Featuring DIANE BERKENFELD, DAVE BLACK, MIKE CORRADO & LINDSAY SILVERMAN Focal length, usually represented in millimeters (mm), is the basic description
JANUARY 19, 2018 BEGINNER Understanding Focal Length Featuring DIANE BERKENFELD, DAVE BLACK, MIKE CORRADO & LINDSAY SILVERMAN Focal length, usually represented in millimeters (mm), is the basic description
Prof. Feng Liu. Spring /05/2017
 Prof. Feng Liu Spring 2017 http://www.cs.pdx.edu/~fliu/courses/cs510/ 04/05/2017 Last Time Course overview Admin. Info Computational Photography 2 Today Digital Camera History of Camera Controlling Camera
Prof. Feng Liu Spring 2017 http://www.cs.pdx.edu/~fliu/courses/cs510/ 04/05/2017 Last Time Course overview Admin. Info Computational Photography 2 Today Digital Camera History of Camera Controlling Camera
Aberrations, Camera, Eye
 Aberrations, Camera, Eye This is a question that we probably can't answer. If the Invisible Man is also blind because no light is being absorbed by his retinas, then when we die and become spirits that
Aberrations, Camera, Eye This is a question that we probably can't answer. If the Invisible Man is also blind because no light is being absorbed by his retinas, then when we die and become spirits that
Lecture 9. Lecture 9. t (min)
") Sensitivity of the Eye Lecture 9 The eye is capable of dark adaptation. This comes about by opening of the iris, as well as a change in rod cell photochemistry fovea only least perceptible brightness 10
Sensitivity of the Eye Lecture 9 The eye is capable of dark adaptation. This comes about by opening of the iris, as well as a change in rod cell photochemistry fovea only least perceptible brightness 10
Homographies and Mosaics
 Homographies and Mosaics Jeffrey Martin (jeffrey-martin.com) with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2011 Why Mosaic? Are
Homographies and Mosaics Jeffrey Martin (jeffrey-martin.com) with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2011 Why Mosaic? Are
Acquisition. Some slides from: Yung-Yu Chuang (DigiVfx) Jan Neumann, Pat Hanrahan, Alexei Efros
 Jan Neumann, Pat Hanrahan, Alexei Efros") Acquisition Some slides from: Yung-Yu Chuang (DigiVfx) Jan Neumann, Pat Hanrahan, Alexei Efros Image Acquisition Digital Camera Film Outline Pinhole camera Lens Lens aberrations Exposure Sensors Noise
Acquisition Some slides from: Yung-Yu Chuang (DigiVfx) Jan Neumann, Pat Hanrahan, Alexei Efros Image Acquisition Digital Camera Film Outline Pinhole camera Lens Lens aberrations Exposure Sensors Noise
Name: Date: Math in Special Effects: Try Other Challenges. Student Handout
 Name: Date: Math in Special Effects: Try Other Challenges When filming special effects, a high-speed photographer needs to control the duration and impact of light by adjusting a number of settings, including
Name: Date: Math in Special Effects: Try Other Challenges When filming special effects, a high-speed photographer needs to control the duration and impact of light by adjusting a number of settings, including
Image Formation and Capture
 Figure credits: B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, A. Theuwissen, and J. Malik Image Formation and Capture COS 429: Computer Vision Image Formation and Capture Real world Optics Sensor Devices
Figure credits: B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, A. Theuwissen, and J. Malik Image Formation and Capture COS 429: Computer Vision Image Formation and Capture Real world Optics Sensor Devices
Homographies and Mosaics
 Homographies and Mosaics Jeffrey Martin (jeffrey-martin.com) CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2014 Steve Seitz and
Homographies and Mosaics Jeffrey Martin (jeffrey-martin.com) CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2014 Steve Seitz and
Lecture 22: Cameras & Lenses III. Computer Graphics and Imaging UC Berkeley CS184/284A, Spring 2017
 Lecture 22: Cameras & Lenses III Computer Graphics and Imaging UC Berkeley, Spring 2017 F-Number For Lens vs. Photo A lens s F-Number is the maximum for that lens E.g. 50 mm F/1.4 is a high-quality telephoto
Lecture 22: Cameras & Lenses III Computer Graphics and Imaging UC Berkeley, Spring 2017 F-Number For Lens vs. Photo A lens s F-Number is the maximum for that lens E.g. 50 mm F/1.4 is a high-quality telephoto
Physics 1230: Light and Color. Guest Lecture, Jack again. Lecture 23: More about cameras
 Physics 1230: Light and Color Chuck Rogers, Charles.Rogers@colorado.edu Ryan Henley, Valyria McFarland, Peter Siegfried physicscourses.colorado.edu/phys1230 Guest Lecture, Jack again Lecture 23: More about
Physics 1230: Light and Color Chuck Rogers, Charles.Rogers@colorado.edu Ryan Henley, Valyria McFarland, Peter Siegfried physicscourses.colorado.edu/phys1230 Guest Lecture, Jack again Lecture 23: More about
Lens Aperture. South Pasadena High School Final Exam Study Guide- 1 st Semester Photo ½. Study Guide Topics that will be on the Final Exam
 South Pasadena High School Final Exam Study Guide- 1 st Semester Photo ½ Study Guide Topics that will be on the Final Exam The Rule of Thirds Depth of Field Lens and its properties Aperture and F-Stop
South Pasadena High School Final Exam Study Guide- 1 st Semester Photo ½ Study Guide Topics that will be on the Final Exam The Rule of Thirds Depth of Field Lens and its properties Aperture and F-Stop
3D Viewing. Introduction to Computer Graphics Torsten Möller / Manfred Klaffenböck. Machiraju/Zhang/Möller
 3D Viewing Introduction to Computer Graphics Torsten Möller / Manfred Klaffenböck Machiraju/Zhang/Möller Reading Chapter 5 of Angel Chapter 13 of Hughes, van Dam, Chapter 7 of Shirley+Marschner Machiraju/Zhang/Möller
3D Viewing Introduction to Computer Graphics Torsten Möller / Manfred Klaffenböck Machiraju/Zhang/Möller Reading Chapter 5 of Angel Chapter 13 of Hughes, van Dam, Chapter 7 of Shirley+Marschner Machiraju/Zhang/Möller
Determining MTF with a Slant Edge Target ABSTRACT AND INTRODUCTION
 Determining MTF with a Slant Edge Target Douglas A. Kerr Issue 2 October 13, 2010 ABSTRACT AND INTRODUCTION The modulation transfer function (MTF) of a photographic lens tells us how effectively the lens
Determining MTF with a Slant Edge Target Douglas A. Kerr Issue 2 October 13, 2010 ABSTRACT AND INTRODUCTION The modulation transfer function (MTF) of a photographic lens tells us how effectively the lens
Computational Approaches to Cameras
 Computational Approaches to Cameras 11/16/17 Magritte, The False Mirror (1935) Computational Photography Derek Hoiem, University of Illinois Announcements Final project proposal due Monday (see links on
Computational Approaches to Cameras 11/16/17 Magritte, The False Mirror (1935) Computational Photography Derek Hoiem, University of Illinois Announcements Final project proposal due Monday (see links on
Name: Lab Partner: Section:
 Chapter 10 Thin Lenses Name: Lab Partner: Section: 10.1 Purpose In this experiment, the formation of images by concave and convex lenses will be explored. The application of the thin lens equation and
Chapter 10 Thin Lenses Name: Lab Partner: Section: 10.1 Purpose In this experiment, the formation of images by concave and convex lenses will be explored. The application of the thin lens equation and
Image stitching. Image stitching. Video summarization. Applications of image stitching. Stitching = alignment + blending. geometrical registration
 Image stitching Stitching = alignment + blending Image stitching geometrical registration photometric registration Digital Visual Effects, Spring 2006 Yung-Yu Chuang 2005/3/22 with slides by Richard Szeliski,
Image stitching Stitching = alignment + blending Image stitching geometrical registration photometric registration Digital Visual Effects, Spring 2006 Yung-Yu Chuang 2005/3/22 with slides by Richard Szeliski,
Image Formation and Capture. Acknowledgment: some figures by B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, and A. Theuwissen
 Image Formation and Capture Acknowledgment: some figures by B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, and A. Theuwissen Image Formation and Capture Real world Optics Sensor Devices Sources of Error
Image Formation and Capture Acknowledgment: some figures by B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, and A. Theuwissen Image Formation and Capture Real world Optics Sensor Devices Sources of Error
Creating a Panorama Photograph Using Photoshop Elements
 Creating a Panorama Photograph Using Photoshop Elements Following are guidelines when shooting photographs for a panorama. Overlap images sufficiently -- Images should overlap approximately 15% to 40%.
Creating a Panorama Photograph Using Photoshop Elements Following are guidelines when shooting photographs for a panorama. Overlap images sufficiently -- Images should overlap approximately 15% to 40%.
Physics 1230 Homework 8 Due Friday June 24, 2016
 At this point, you know lots about mirrors and lenses and can predict how they interact with light from objects to form images for observers. In the next part of the course, we consider applications of
At this point, you know lots about mirrors and lenses and can predict how they interact with light from objects to form images for observers. In the next part of the course, we consider applications of
Section 3. Imaging With A Thin Lens
 3-1 Section 3 Imaging With A Thin Lens Object at Infinity An object at infinity produces a set of collimated set of rays entering the optical system. Consider the rays from a finite object located on the
3-1 Section 3 Imaging With A Thin Lens Object at Infinity An object at infinity produces a set of collimated set of rays entering the optical system. Consider the rays from a finite object located on the
Cameras. Outline. Pinhole camera. Camera trial #1. Pinhole camera Film camera Digital camera Video camera High dynamic range imaging
 Outline Cameras Pinhole camera Film camera Digital camera Video camera High dynamic range imaging Digital Visual Effects, Spring 2006 Yung-Yu Chuang 2006/3/1 with slides by Fedro Durand, Brian Curless,
Outline Cameras Pinhole camera Film camera Digital camera Video camera High dynamic range imaging Digital Visual Effects, Spring 2006 Yung-Yu Chuang 2006/3/1 with slides by Fedro Durand, Brian Curless,
VC 14/15 TP2 Image Formation
 VC 14/15 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
VC 14/15 TP2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
1 Laboratory 7: Fourier Optics
 1051-455-20073 Physical Optics 1 Laboratory 7: Fourier Optics 1.1 Theory: References: Introduction to Optics Pedrottis Chapters 11 and 21 Optics E. Hecht Chapters 10 and 11 The Fourier transform is an
1051-455-20073 Physical Optics 1 Laboratory 7: Fourier Optics 1.1 Theory: References: Introduction to Optics Pedrottis Chapters 11 and 21 Optics E. Hecht Chapters 10 and 11 The Fourier transform is an
Image Formation. Dr. Gerhard Roth. COMP 4102A Winter 2014 Version 1
 Image Formation Dr. Gerhard Roth COMP 4102A Winter 2014 Version 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
Image Formation Dr. Gerhard Roth COMP 4102A Winter 2014 Version 1 Image Formation Two type of images Intensity image encodes light intensities (passive sensor) Range (depth) image encodes shape and distance
Sensors and Sensing Cameras and Camera Calibration
 Sensors and Sensing Cameras and Camera Calibration Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 20.11.2014
Sensors and Sensing Cameras and Camera Calibration Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 20.11.2014
Topic 6 - Optics Depth of Field and Circle Of Confusion
 Topic 6 - Optics Depth of Field and Circle Of Confusion Learning Outcomes In this lesson, we will learn all about depth of field and a concept known as the Circle of Confusion. By the end of this lesson,
Topic 6 - Optics Depth of Field and Circle Of Confusion Learning Outcomes In this lesson, we will learn all about depth of field and a concept known as the Circle of Confusion. By the end of this lesson,
PHY 1160C Homework Chapter 26: Optical Instruments Ch 26: 2, 3, 5, 9, 13, 15, 20, 25, 27
 PHY 60C Homework Chapter 26: Optical Instruments Ch 26: 2, 3, 5, 9, 3, 5, 20, 25, 27 26.2 A pin-hole camera is used to take a photograph of a student who is.8 m tall. The student stands 2.7 m in front
PHY 60C Homework Chapter 26: Optical Instruments Ch 26: 2, 3, 5, 9, 3, 5, 20, 25, 27 26.2 A pin-hole camera is used to take a photograph of a student who is.8 m tall. The student stands 2.7 m in front
Introduction to camera usage. The universal manual controls of most cameras
 Introduction to camera usage A camera in its barest form is simply a light tight container that utilizes a lens with iris, a shutter that has variable speeds, and contains a sensitive piece of media, either
Introduction to camera usage A camera in its barest form is simply a light tight container that utilizes a lens with iris, a shutter that has variable speeds, and contains a sensitive piece of media, either
Overview. Image formation - 1
 Overview perspective imaging Image formation Refraction of light Thin-lens equation Optical power and accommodation Image irradiance and scene radiance Digital images Introduction to MATLAB Image formation
Overview perspective imaging Image formation Refraction of light Thin-lens equation Optical power and accommodation Image irradiance and scene radiance Digital images Introduction to MATLAB Image formation
25 Questions. All are multiple choice questions. 4 will require an additional written response explaining your answer.
 9 th Grade Digital Photography Final Review- Written Portion of Exam EXAM STRUCTURE: 25 Questions. All are multiple choice questions. 4 will require an additional written response explaining your answer.
9 th Grade Digital Photography Final Review- Written Portion of Exam EXAM STRUCTURE: 25 Questions. All are multiple choice questions. 4 will require an additional written response explaining your answer.
Lecture 18: Light field cameras. (plenoptic cameras) Visual Computing Systems CMU , Fall 2013
 Visual Computing Systems CMU , Fall 2013") Lecture 18: Light field cameras (plenoptic cameras) Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today:
Lecture 18: Light field cameras (plenoptic cameras) Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today:
The Formation of an Aerial Image, part 3
 T h e L i t h o g r a p h y T u t o r (July 1993) The Formation of an Aerial Image, part 3 Chris A. Mack, FINLE Technologies, Austin, Texas In the last two issues, we described how a projection system
T h e L i t h o g r a p h y T u t o r (July 1993) The Formation of an Aerial Image, part 3 Chris A. Mack, FINLE Technologies, Austin, Texas In the last two issues, we described how a projection system
CAMERA BASICS. Stops of light
 CAMERA BASICS Stops of light A stop of light isn t a quantifiable measurement it s a relative measurement. A stop of light is defined as a doubling or halving of any quantity of light. The word stop is
CAMERA BASICS Stops of light A stop of light isn t a quantifiable measurement it s a relative measurement. A stop of light is defined as a doubling or halving of any quantity of light. The word stop is
Be aware that there is no universal notation for the various quantities.
 Fourier Optics v2.4 Ray tracing is limited in its ability to describe optics because it ignores the wave properties of light. Diffraction is needed to explain image spatial resolution and contrast and
Fourier Optics v2.4 Ray tracing is limited in its ability to describe optics because it ignores the wave properties of light. Diffraction is needed to explain image spatial resolution and contrast and
Image Formation. World Optics Sensor Signal. Computer Vision. Introduction to. Light (Energy) Source. Surface Imaging Plane. Pinhole Lens.
 Source. Surface Imaging Plane. Pinhole Lens.") Image Formation Light (Energy) Source Surface Imaging Plane Pinhole Lens World Optics Sensor Signal B&W Film Color Film TV Camera Silver Density Silver density in three color layers Electrical Today Optics:
Image Formation Light (Energy) Source Surface Imaging Plane Pinhole Lens World Optics Sensor Signal B&W Film Color Film TV Camera Silver Density Silver density in three color layers Electrical Today Optics:
Image Formation: Camera Model
 Image Formation: Camera Model Ruigang Yang COMP 684 Fall 2005, CS684-IBMR Outline Camera Models Pinhole Perspective Projection Affine Projection Camera with Lenses Digital Image Formation The Human Eye
Image Formation: Camera Model Ruigang Yang COMP 684 Fall 2005, CS684-IBMR Outline Camera Models Pinhole Perspective Projection Affine Projection Camera with Lenses Digital Image Formation The Human Eye
Computational Camera & Photography: Coded Imaging
 Computational Camera & Photography: Coded Imaging Camera Culture Ramesh Raskar MIT Media Lab http://cameraculture.media.mit.edu/ Image removed due to copyright restrictions. See Fig. 1, Eight major types
Computational Camera & Photography: Coded Imaging Camera Culture Ramesh Raskar MIT Media Lab http://cameraculture.media.mit.edu/ Image removed due to copyright restrictions. See Fig. 1, Eight major types
VC 11/12 T2 Image Formation
 VC 11/12 T2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
VC 11/12 T2 Image Formation Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Computer Vision? The Human Visual System
Computational Cameras. Rahul Raguram COMP
 Computational Cameras Rahul Raguram COMP 790-090 What is a computational camera? Camera optics Camera sensor 3D scene Traditional camera Final image Modified optics Camera sensor Image Compute 3D scene
Computational Cameras Rahul Raguram COMP 790-090 What is a computational camera? Camera optics Camera sensor 3D scene Traditional camera Final image Modified optics Camera sensor Image Compute 3D scene
MIT CSAIL Advances in Computer Vision Fall Problem Set 6: Anaglyph Camera Obscura
 MIT CSAIL 6.869 Advances in Computer Vision Fall 2013 Problem Set 6: Anaglyph Camera Obscura Posted: Tuesday, October 8, 2013 Due: Thursday, October 17, 2013 You should submit a hard copy of your work
MIT CSAIL 6.869 Advances in Computer Vision Fall 2013 Problem Set 6: Anaglyph Camera Obscura Posted: Tuesday, October 8, 2013 Due: Thursday, October 17, 2013 You should submit a hard copy of your work
Lenses. Images. Difference between Real and Virtual Images
 Linear Magnification (m) This is the factor by which the size of the object has been magnified by the lens in a direction which is perpendicular to the axis of the lens. Linear magnification can be calculated
Linear Magnification (m) This is the factor by which the size of the object has been magnified by the lens in a direction which is perpendicular to the axis of the lens. Linear magnification can be calculated
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 2 Aug 24 th, 2017 Slides from Dr. Shishir K Shah, Rajesh Rao and Frank (Qingzhong) Liu 1 Instructor TA Digital Image Processing COSC 6380/4393 Pranav Mantini
Digital Image Processing COSC 6380/4393 Lecture 2 Aug 24 th, 2017 Slides from Dr. Shishir K Shah, Rajesh Rao and Frank (Qingzhong) Liu 1 Instructor TA Digital Image Processing COSC 6380/4393 Pranav Mantini
DSLR Cameras have a wide variety of lenses that can be used.
 Chapter 8-Lenses DSLR Cameras have a wide variety of lenses that can be used. The camera lens is very important in making great photographs. It controls what the sensor sees, how much of the scene is included,
Chapter 8-Lenses DSLR Cameras have a wide variety of lenses that can be used. The camera lens is very important in making great photographs. It controls what the sensor sees, how much of the scene is included,
Opto Engineering S.r.l.
 TUTORIAL #1 Telecentric Lenses: basic information and working principles On line dimensional control is one of the most challenging and difficult applications of vision systems. On the other hand, besides
TUTORIAL #1 Telecentric Lenses: basic information and working principles On line dimensional control is one of the most challenging and difficult applications of vision systems. On the other hand, besides
[ Summary. 3i = 1* 6i = 4J;
 the projections at angle 2. We calculate the difference between the measured projections at angle 2 (6 and 14) and the projections based on the previous esti mate (top row: 2>\ + 6\ = 10; same for bottom
the projections at angle 2. We calculate the difference between the measured projections at angle 2 (6 and 14) and the projections based on the previous esti mate (top row: 2>\ + 6\ = 10; same for bottom
Fundamental Paraxial Equation for Thin Lenses
 THIN LENSES Fundamental Paraxial Equation for Thin Lenses A thin lens is one for which thickness is "negligibly" small and may be ignored. Thin lenses are the most important optical entity in ophthalmic
THIN LENSES Fundamental Paraxial Equation for Thin Lenses A thin lens is one for which thickness is "negligibly" small and may be ignored. Thin lenses are the most important optical entity in ophthalmic
CS354 Computer Graphics Viewing and Projections
 Slide Credit: Donald S. Fussell CS354 Computer Graphics Viewing and Projections Qixing Huang February 19th 2018 Eye Coordinates (not NDC) Planar Geometric Projections Standard projections project onto
Slide Credit: Donald S. Fussell CS354 Computer Graphics Viewing and Projections Qixing Huang February 19th 2018 Eye Coordinates (not NDC) Planar Geometric Projections Standard projections project onto