CarSim/TruckSim/BikeSim Real-Time Hardware In the Loop Mechanical Simulation Corporation
|
|
|
- Julius Sullivan
- 6 years ago
- Views:
Transcription



1 CarSim/TruckSim/BikeSim Real-Time Hardware In the Loop Mechanical Simulation Corporation
. There is an accurate timing control.")
2 What is Hardware In the Loop (HIL)? Pure Simulation Software In the Loop (SIL) Plant Model Simulation with/without sub models. There is no timing control and runs as fast as possible. The integration time step can be continuous. Pure Real Time Simulation Run SIL on the computer with Real Time Operation System (RTOS). There is an accurate timing control. The integration time step must be fixed. Hardware In the Loop Simulation Pure Real Time simulation + real components (ECUs and actuators). Vehicle Plant Model SIL HIL External Controller
3 Why do we need Hardware In the Loop? Verify model - can it run in hard real time? Verify hardware controllers Some parts are difficult to simulate (non-linear behavior, environmental variances) Components laboratory testing (reliability, vibration, temperature, EMF) Save cost to test real vehicles Save development time Easily reproduce/repeat test conditions Safe for testing for some dangerous conditions (rollover, pre-crash)
4 Example Applications Brake Testing Test prototype and production ECUs Hydraulic lines and calipers Environmental chamber Applications temperature and EMI reliability, brake dyno control Active Damper System Physical dampers difficult to model Complex suite of test conditions (roads and maneuvers) Applications 7 post rig, stability control, ride optimization Driving Simulator for Active Safety Human in the Loop Drive vehicle through complex traffic scenarios Freeform testing Visual sensor representations Applications active cruise control, crash mitigation, lane departure
5 Case Study Braking ROI Evaluation of Physical Testing vs. HIL Physical Testing One Time Costs Instrumentation $50k Recurring Costs Mule Car w/installation $40k Transportation $20k Fuel $8k Staff $180k CarSim HIL One Time Costs Lab construction $120K Recurring Costs Energy $2k Installation $5k Labor $20k Uptime less than 80% Uptime 99% Uptime issues Weather, driver availability, fueling, nonproductive driving, vehicle component failure, remote locations, driver accuracy, driver safety Uptime issues Test component failure



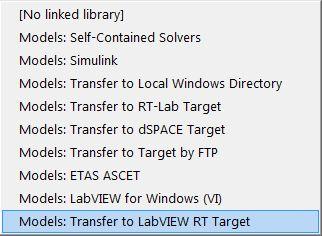
6 CarSim/TruckSim/BikeSim supported RT System RT-Lab Target dspace Target Linux RT Based Target LabVIEW RT Target (LabCar, A&D, Fujitsu-Ten)

7 CarSim/TruckSim/BikeSim supported RT System Opal-RT: RT-Lab

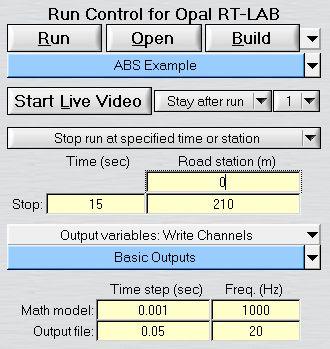
8 RT-Lab Target Settings

9 Simulink Model for RT-Lab System Run on Host Subsystem Run on Target Subsystem Output to ECU Input from ECU
 ABS controller runs on dspace MicroAutobox CarSim vehicle model runs on compact dspace chassis with DS1006 and DS2211(IO)")
10 CarSim/TruckSim/BikeSim supported RT System dspace DS1006, DS1005 (PPC 800+ MHz), DS1103 (PPC 800+ MHz), MicroAutobox (PPC 800 MHz) ABS controller runs on dspace MicroAutobox CarSim vehicle model runs on compact dspace chassis with DS1006 and DS2211(IO)

11 dspace Target Settings


12 Simulink Model for dspace System DS2211 IO Card Runs on DS1006 Board

13 CarSim/TruckSim/BikeSim supported RT System ETAS LabCar

14 Linux RT Based Target Settings

15 Simulink Model for ETAS LabCar LabCar IO Ports
 Target Monitor (option) Host PC LabVIEW RT Target ESC Controller")
16 CarSim/TruckSim/BikeSim supported RT System LabVIEW RT Real-Time Animator (option) Target Monitor (option) Host PC LabVIEW RT Target ESC Controller
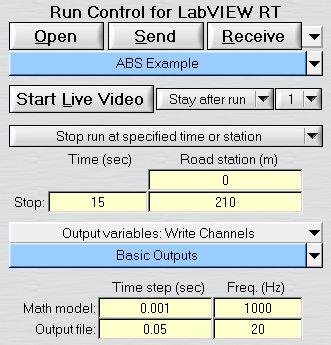

17 LabVIEW-RT Target Settings


18 LabVIEW Model for LabVIEW-RT System LabVIEW Background Connection LabVIEW Front Panel Timed Loop. dt= 1 ms Inputs from ECU Initialize CarSim Vehicle Solver. Outputs to ECU CarSim Vehicle Solver. Update each time step Terminate CarSim Vehicle Solver.



19 HIL+Human In the Loop: Driving Simulators Engineering Tool Drive on your proving ground Instantaneous A/B/C/D/ comparison of vehicle components Drive a road before it is built HIL testing of ECUs or complete chassis systems CarSim/TruckSim Inside Integrate the CarSim/TruckSim math models with other technologies Advanced vehicle controls Driver training Entertainment
20 Thank You
Mechanical Simulation. Advanced Vehicle Dynamics Solutions
 Mechanical Simulation Advanced Vehicle Dynamics Solutions www.carsim.com Introduction Mechanical Simulation Corporation develops and distributes vehicle dynamics software tools for simulating the way cars
Mechanical Simulation Advanced Vehicle Dynamics Solutions www.carsim.com Introduction Mechanical Simulation Corporation develops and distributes vehicle dynamics software tools for simulating the way cars
David Howarth. Business Development Manager Americas
 David Howarth Business Development Manager Americas David Howarth IPG Automotive USA, Inc. Business Development Manager Americas david.howarth@ipg-automotive.com ni.com Testing Automated Driving Functions
David Howarth Business Development Manager Americas David Howarth IPG Automotive USA, Inc. Business Development Manager Americas david.howarth@ipg-automotive.com ni.com Testing Automated Driving Functions
Figure 1.1: Quanser Driving Simulator
 1 INTRODUCTION The Quanser HIL Driving Simulator (QDS) is a modular and expandable LabVIEW model of a car driving on a closed track. The model is intended as a platform for the development, implementation
1 INTRODUCTION The Quanser HIL Driving Simulator (QDS) is a modular and expandable LabVIEW model of a car driving on a closed track. The model is intended as a platform for the development, implementation
MotionDesk. 3-D online animation of simulated mechanical systems in real time. Highlights
 MotionDesk 3-D online animation of simulated mechanical systems in real time Highlights Tight integration to ModelDesk and ASM Enhanced support for all aspects of advanced driver assistance systems (ADAS)
MotionDesk 3-D online animation of simulated mechanical systems in real time Highlights Tight integration to ModelDesk and ASM Enhanced support for all aspects of advanced driver assistance systems (ADAS)
Virtual Testing of Autonomous Vehicles
 Virtual Testing of Autonomous Vehicles Mike Dempsey Claytex Services Limited Software, Consultancy, Training Based in Leamington Spa, UK Office in Cape Town, South Africa Experts in Systems Engineering,
Virtual Testing of Autonomous Vehicles Mike Dempsey Claytex Services Limited Software, Consultancy, Training Based in Leamington Spa, UK Office in Cape Town, South Africa Experts in Systems Engineering,
Virtual Homologation of Software- Intensive Safety Systems: From ESC to Automated Driving
 Virtual Homologation of Software- Intensive Safety Systems: From ESC to Automated Driving Dr. Houssem Abdellatif Global Head Autonomous Driving & ADAS TÜV SÜD Auto Service Christian Gnandt Lead Engineer
Virtual Homologation of Software- Intensive Safety Systems: From ESC to Automated Driving Dr. Houssem Abdellatif Global Head Autonomous Driving & ADAS TÜV SÜD Auto Service Christian Gnandt Lead Engineer
Virtual testing by coupling high fidelity vehicle simulation with microscopic traffic flow simulation
 DYNA4 with DYNAanimation in Co-Simulation with SUMO vehicle under test Virtual testing by coupling high fidelity vehicle simulation with microscopic traffic flow simulation Dr.-Ing. Jakob Kaths TESIS GmbH
DYNA4 with DYNAanimation in Co-Simulation with SUMO vehicle under test Virtual testing by coupling high fidelity vehicle simulation with microscopic traffic flow simulation Dr.-Ing. Jakob Kaths TESIS GmbH
Test And Validation: Coping With Complexity The state of play in vehicle software and system validation
 David Bailey, ETAS GmbH Test And Validation: Coping With Complexity The state of play in vehicle software and system validation 1 05.Jun.2008 Copyright 2004, ETAS GmbH LiveDevices Ltd. Vetronix Corp. All
David Bailey, ETAS GmbH Test And Validation: Coping With Complexity The state of play in vehicle software and system validation 1 05.Jun.2008 Copyright 2004, ETAS GmbH LiveDevices Ltd. Vetronix Corp. All
Hardware-in-the-Loop Simulation
 University College of Southeast Norway Hardware-in-the-Loop Simulation Introduction What is Hardware-in-the-Loop (HIL) Simulation or What is Hardware-in-the-Loop (HIL) Test? The Hardware-in-the-Loop process
University College of Southeast Norway Hardware-in-the-Loop Simulation Introduction What is Hardware-in-the-Loop (HIL) Simulation or What is Hardware-in-the-Loop (HIL) Test? The Hardware-in-the-Loop process
DLR s ROboMObil HIL Simulator Using FMI 2.0 Technology on dspace SCALEXIO Real-time Hardware. Andreas Pillekeit - dspace. Jonathan Brembeck DLR
 DLR.de Chart 1 DLR s ROboMObil HIL Simulator Using FMI 2.0 Technology on dspace SCALEXIO Real-time Hardware FMI User Meeting at the Modelica Conference 2017 Jonathan Brembeck DLR Andreas Pillekeit - dspace
DLR.de Chart 1 DLR s ROboMObil HIL Simulator Using FMI 2.0 Technology on dspace SCALEXIO Real-time Hardware FMI User Meeting at the Modelica Conference 2017 Jonathan Brembeck DLR Andreas Pillekeit - dspace
Virtual car models for handling and ride bridging off and on-line simulations
 Virtual car models for handling and ride bridging off and on-line simulations Dr.Harald Wilhelm, Simulation Fahrverhalten Audi AG Diego Minen, Technical Director VI-Grade Vehicle EPO Stuttgart 2009 1 VI-CarRealTime
Virtual car models for handling and ride bridging off and on-line simulations Dr.Harald Wilhelm, Simulation Fahrverhalten Audi AG Diego Minen, Technical Director VI-Grade Vehicle EPO Stuttgart 2009 1 VI-CarRealTime
Applied Collaboration for the Virtualization of Roads and Customer Approval as Exemplified by a Brake Control System
 Applied Collaboration for the Virtualization of Roads and Customer Approval as Exemplified by a Brake Control System Sven-Etienne Henschel, Rohan Deshetti Applied Collaboration for the Virtualization of
Applied Collaboration for the Virtualization of Roads and Customer Approval as Exemplified by a Brake Control System Sven-Etienne Henschel, Rohan Deshetti Applied Collaboration for the Virtualization of
Prototyping Unit for Modelbased Applications
 PUMA Software and hardware at the highest level Prototyping Unit for Modelbased Applications With PUMA, we offer a compact and universal Rapid-Control-Prototyping-Platform optionally with integrated power
PUMA Software and hardware at the highest level Prototyping Unit for Modelbased Applications With PUMA, we offer a compact and universal Rapid-Control-Prototyping-Platform optionally with integrated power
Intelligent driving TH« TNO I Innovation for live
 Intelligent driving TNO I Innovation for live TH«Intelligent Transport Systems have become an integral part of the world. In addition to the current ITS systems, intelligent vehicles can make a significant
Intelligent driving TNO I Innovation for live TH«Intelligent Transport Systems have become an integral part of the world. In addition to the current ITS systems, intelligent vehicles can make a significant
Significant Reduction of Validation Efforts for Dynamic Light Functions with FMI for Multi-Domain Integration and Test Platforms
 Significant Reduction of Validation Efforts for Dynamic Light Functions with FMI for Multi-Domain Integration and Test Platforms Dr. Stefan-Alexander Schneider Johannes Frimberger BMW AG, 80788 Munich,
Significant Reduction of Validation Efforts for Dynamic Light Functions with FMI for Multi-Domain Integration and Test Platforms Dr. Stefan-Alexander Schneider Johannes Frimberger BMW AG, 80788 Munich,
Development of a driver information and warning system with vehicle hardware-in-the-loop simulations
 Delft University of Technology Delft Center for Systems and Control Technical report 09-042 Development of a driver information and warning system with vehicle hardware-in-the-loop simulations O.J. Gietelink,
Delft University of Technology Delft Center for Systems and Control Technical report 09-042 Development of a driver information and warning system with vehicle hardware-in-the-loop simulations O.J. Gietelink,
ADAS Development using Advanced Real-Time All-in-the-Loop Simulators. Roberto De Vecchi VI-grade Enrico Busto - AddFor
 ADAS Development using Advanced Real-Time All-in-the-Loop Simulators Roberto De Vecchi VI-grade Enrico Busto - AddFor The Scenario The introduction of ADAS and AV has created completely new challenges
ADAS Development using Advanced Real-Time All-in-the-Loop Simulators Roberto De Vecchi VI-grade Enrico Busto - AddFor The Scenario The introduction of ADAS and AV has created completely new challenges
Final Report Non Hit Car And Truck
 Final Report Non Hit Car And Truck 2010-2013 Project within Vehicle and Traffic Safety Author: Anders Almevad Date 2014-03-17 Content 1. Executive summary... 3 2. Background... 3. Objective... 4. Project
Final Report Non Hit Car And Truck 2010-2013 Project within Vehicle and Traffic Safety Author: Anders Almevad Date 2014-03-17 Content 1. Executive summary... 3 2. Background... 3. Objective... 4. Project
A Real-Time Regulator, Turbine and Alternator Test Bench for Ensuring Generators Under Test Contribute to Whole System Stability
 A Real-Time Regulator, Turbine and Alternator Test Bench for Ensuring Generators Under Test Contribute to Whole System Stability Marc Langevin, eng., Ph.D.*. Marc Soullière, tech.** Jean Bélanger, eng.***
A Real-Time Regulator, Turbine and Alternator Test Bench for Ensuring Generators Under Test Contribute to Whole System Stability Marc Langevin, eng., Ph.D.*. Marc Soullière, tech.** Jean Bélanger, eng.***
Time Triggered Protocol (TTP/C): A Safety-Critical System Protocol
: A Safety-Critical System Protocol") Time Triggered Protocol (TTP/C): A Safety-Critical System Protocol Literature Review EE382c Fall 1999 Howard Curtis Global Technology Services MCC Robert France Global Software Division Motorola, Inc.
Time Triggered Protocol (TTP/C): A Safety-Critical System Protocol Literature Review EE382c Fall 1999 Howard Curtis Global Technology Services MCC Robert France Global Software Division Motorola, Inc.
Development & Simulation of a Test Environment for Vehicle Dynamics a Virtual Test Track Layout.
 Development & Simulation of a Test Environment for Vehicle Dynamics a Virtual Test Track Layout. PhD.C. -Eng. Kmeid Saad 1 1 Introduction... 2 2 Vehicle Dynamic Libraries... 3 3 Virtual Driver... 3 4 ROAD...
Development & Simulation of a Test Environment for Vehicle Dynamics a Virtual Test Track Layout. PhD.C. -Eng. Kmeid Saad 1 1 Introduction... 2 2 Vehicle Dynamic Libraries... 3 3 Virtual Driver... 3 4 ROAD...
When testing meets intelligence MECHATRONICS
 When testing meets intelligence MECHATRONICS Mechatronics Development and test centre Integrated test environment for mechatronic systems and structures. Mechatronics The combination of mechanics, electronics
When testing meets intelligence MECHATRONICS Mechatronics Development and test centre Integrated test environment for mechatronic systems and structures. Mechatronics The combination of mechanics, electronics
Hardware-in-loop Electronic Throttle System Based On Simulink Ning Chen 1,a,Pinchang Zhu 1,b
 Applied Mechanics and Materials Online: 2011-10-24 ISSN: 1662-7482, Vols. 128-129, pp 898-903 doi:10.4028/www.scientific.net/amm.128-129.898 2012 Trans Tech Publications, Switzerland Hardware-in-loop Electronic
Applied Mechanics and Materials Online: 2011-10-24 ISSN: 1662-7482, Vols. 128-129, pp 898-903 doi:10.4028/www.scientific.net/amm.128-129.898 2012 Trans Tech Publications, Switzerland Hardware-in-loop Electronic
MicroAutoBox. Platform for in-vehicle function prototyping Variants with CAN, LIN and FlexRay interfaces
 MicroAutoBox Platform for in-vehicle function prototyping Variants with CAN, LIN and FlexRay interfaces dspace MicroAutoBox Hardware MicroAutoBox Compact, stand-alone prototyping unit Key Features Develop,
MicroAutoBox Platform for in-vehicle function prototyping Variants with CAN, LIN and FlexRay interfaces dspace MicroAutoBox Hardware MicroAutoBox Compact, stand-alone prototyping unit Key Features Develop,
Keywords: Aircraft Systems Integration, Real-Time Simulation, Hardware-In-The-Loop Testing
 25 TH INTERNATIONAL CONGRESS OF THE AERONAUTICAL SCIENCES REAL-TIME HARDWARE-IN-THE-LOOP SIMULATION OF FLY-BY-WIRE FLIGHT CONTROL SYSTEMS Eugenio Denti*, Gianpietro Di Rito*, Roberto Galatolo* * University
25 TH INTERNATIONAL CONGRESS OF THE AERONAUTICAL SCIENCES REAL-TIME HARDWARE-IN-THE-LOOP SIMULATION OF FLY-BY-WIRE FLIGHT CONTROL SYSTEMS Eugenio Denti*, Gianpietro Di Rito*, Roberto Galatolo* * University
Introduction to Model-Based Design for Offshore and Marine applications C. Kleijn
 Introduction to Model-Based Design for Offshore and Marine applications C. Kleijn Model Based Design Contents Contents 1. Introduction 3 1.1. What is Model-Based Design 3 1.2. How is it used? 3 2. Benefits
Introduction to Model-Based Design for Offshore and Marine applications C. Kleijn Model Based Design Contents Contents 1. Introduction 3 1.1. What is Model-Based Design 3 1.2. How is it used? 3 2. Benefits
ME375 Lab Project. Bradley Boane & Jeremy Bourque April 25, 2018
 ME375 Lab Project Bradley Boane & Jeremy Bourque April 25, 2018 Introduction: The goal of this project was to build and program a two-wheel robot that travels forward in a straight line for a distance
ME375 Lab Project Bradley Boane & Jeremy Bourque April 25, 2018 Introduction: The goal of this project was to build and program a two-wheel robot that travels forward in a straight line for a distance
Single PC Cost Effective Reliable. Configurations Desktop Quarter Cab Half-Cab Custom
 Vision: Provide the function and support our customers need to fulfill their research and development goals, while keeping the minisim an affordable and accessible solution. Stats: Over 70 simulators at
Vision: Provide the function and support our customers need to fulfill their research and development goals, while keeping the minisim an affordable and accessible solution. Stats: Over 70 simulators at
Physics Based Sensor simulation
 Physics Based Sensor simulation Jordan Gorrochotegui - Product Manager Software and Services Mike Phillips Software Engineer Restricted Siemens AG 2017 Realize innovation. Siemens offers solutions across
Physics Based Sensor simulation Jordan Gorrochotegui - Product Manager Software and Services Mike Phillips Software Engineer Restricted Siemens AG 2017 Realize innovation. Siemens offers solutions across
Applications include: ADAS, chassis control, drivetrain, human machine interface and ergonomics.
 Advanced Vehicle Driving Simulator Applications include: ADAS, chassis control, drivetrain, human machine interface and ergonomics. Advanced Vehicle Driving Simulator (avds) Dynamic, immersive driving
Advanced Vehicle Driving Simulator Applications include: ADAS, chassis control, drivetrain, human machine interface and ergonomics. Advanced Vehicle Driving Simulator (avds) Dynamic, immersive driving
Document Version Publisher s PDF, also known as Version of Record (includes final page, issue and volume numbers)
") Development of a driver information and warning system with vehicle-hardware-in-the-loop simulations Gietelink, O.J.; Ploeg, J.; Schutter, de, B.; Verhaegen, M.H. Published in: Mechatronics DOI: 10.1016/j.mechatronics.2009.04.012
Development of a driver information and warning system with vehicle-hardware-in-the-loop simulations Gietelink, O.J.; Ploeg, J.; Schutter, de, B.; Verhaegen, M.H. Published in: Mechatronics DOI: 10.1016/j.mechatronics.2009.04.012
Automatic Control Systems
 Automatic Control Systems Lecture-1 Basic Concepts of Classical control Emam Fathy Department of Electrical and Control Engineering email: emfmz@yahoo.com 1 What is Control System? A system Controlling
Automatic Control Systems Lecture-1 Basic Concepts of Classical control Emam Fathy Department of Electrical and Control Engineering email: emfmz@yahoo.com 1 What is Control System? A system Controlling
Automated Testing of Autonomous Driving Assistance Systems
 Automated Testing of Autonomous Driving Assistance Systems Lionel Briand Vector Testing Symposium, Stuttgart, 2018 SnT Centre Top level research in Information & Communication Technologies Created to fuel
Automated Testing of Autonomous Driving Assistance Systems Lionel Briand Vector Testing Symposium, Stuttgart, 2018 SnT Centre Top level research in Information & Communication Technologies Created to fuel
Classical Control Based Autopilot Design Using PC/104
 Classical Control Based Autopilot Design Using PC/104 Mohammed A. Elsadig, Alneelain University, Dr. Mohammed A. Hussien, Alneelain University. Abstract Many recent papers have been written in unmanned
Classical Control Based Autopilot Design Using PC/104 Mohammed A. Elsadig, Alneelain University, Dr. Mohammed A. Hussien, Alneelain University. Abstract Many recent papers have been written in unmanned
Model-based Diagnosis Tutorial PHM-E 12
 Model-based Diagnosis Tutorial PHM-E 12 Peter Struss Tech. Univ. of Munich Univ. College Cork OCC M Software GmbH struss@in.tum.de - 1 Outline 1 Introduction: Model-based Systems 2 Component-oriented (Qualitative)
Model-based Diagnosis Tutorial PHM-E 12 Peter Struss Tech. Univ. of Munich Univ. College Cork OCC M Software GmbH struss@in.tum.de - 1 Outline 1 Introduction: Model-based Systems 2 Component-oriented (Qualitative)
Method and Tools Specifications
 Method and Tools Deliverable n. D1.3.2 Method and Tools Sub Project SP1 Requirements and Workpackage WP1.2 Requirements Task n. T1.3.2 Method and Tools Authors N. Pallaro A. Ghiro CRF CRF File name Status
Method and Tools Deliverable n. D1.3.2 Method and Tools Sub Project SP1 Requirements and Workpackage WP1.2 Requirements Task n. T1.3.2 Method and Tools Authors N. Pallaro A. Ghiro CRF CRF File name Status
dspace DS1103 Control Workstation Tutorial and DC Motor Speed Control Project Proposal
 dspace DS1103 Control Workstation Tutorial and DC Motor Speed Control Project Proposal By Annemarie Thomas Advisor: Dr. Winfred Anakwa December 2, 2008 Table of Contents Introduction... 1 Project Summary...
dspace DS1103 Control Workstation Tutorial and DC Motor Speed Control Project Proposal By Annemarie Thomas Advisor: Dr. Winfred Anakwa December 2, 2008 Table of Contents Introduction... 1 Project Summary...
LEARNING FROM THE AVIATION INDUSTRY
 DEVELOPMENT Power Electronics 26 AUTHORS Dipl.-Ing. (FH) Martin Heininger is Owner of Heicon, a Consultant Company in Schwendi near Ulm (Germany). Dipl.-Ing. (FH) Horst Hammerer is Managing Director of
DEVELOPMENT Power Electronics 26 AUTHORS Dipl.-Ing. (FH) Martin Heininger is Owner of Heicon, a Consultant Company in Schwendi near Ulm (Germany). Dipl.-Ing. (FH) Horst Hammerer is Managing Director of
Synchronization between a SystemC based offline Restbus Simulator and a HIL FlexRay network
 Synchronization between a SystemC based offline Restbus Simulator and a HIL FlexRay network Gilles Bertrand Defo, Wolfgang Mueller University of Paderborn / C-LAB Fürstenallee 11 33102 Paderborn Germany
Synchronization between a SystemC based offline Restbus Simulator and a HIL FlexRay network Gilles Bertrand Defo, Wolfgang Mueller University of Paderborn / C-LAB Fürstenallee 11 33102 Paderborn Germany
Cruden motion simulators for motorsport
 Cruden motion simulators for motorsport Cruden supplies top level race teams and motorsport engineering companies with simulator hardware, software, vehicles models, tracks and projection systems. Cruden
Cruden motion simulators for motorsport Cruden supplies top level race teams and motorsport engineering companies with simulator hardware, software, vehicles models, tracks and projection systems. Cruden
Introduction of USRP and Demos. by Dong Han & Rui Zhu
 Introduction of USRP and Demos by Dong Han & Rui Zhu Introduction USRP(Universal Software Radio Peripheral ): A computer-hosted software radio, which is commonly used by research labs, universities. Motherboard
Introduction of USRP and Demos by Dong Han & Rui Zhu Introduction USRP(Universal Software Radio Peripheral ): A computer-hosted software radio, which is commonly used by research labs, universities. Motherboard
Implementation of Hardware-in-the-loop Simulation (HILS) Method for Control Engineering Education
 Method for Control Engineering Education") Implementation of Hardwareintheloop Simulation (HILS) Method for Control Engineering Education Wahyudi Martono, Riza Muhida Department of Mechatronics Engineering, Faculty of Engineering International
Implementation of Hardwareintheloop Simulation (HILS) Method for Control Engineering Education Wahyudi Martono, Riza Muhida Department of Mechatronics Engineering, Faculty of Engineering International
Laboratory set-up for Real-Time study of Electric Drives with Integrated Interfaces for Test and Measurement
 Laboratory set-up for Real-Time study of Electric Drives with Integrated Interfaces for Test and Measurement Fong Mak, Ram Sundaram, Varun Santhaseelan, and Sunil Tandle Gannon University, mak001@gannon.edu,
Laboratory set-up for Real-Time study of Electric Drives with Integrated Interfaces for Test and Measurement Fong Mak, Ram Sundaram, Varun Santhaseelan, and Sunil Tandle Gannon University, mak001@gannon.edu,
TABLE OF CONTENTS CHAPTER TITLE PAGE DECLARATION DEDICATION ACKNOWLEDGEMENT ABSTRACT ABSTRAK
 vii TABLES OF CONTENTS CHAPTER TITLE PAGE DECLARATION DEDICATION ACKNOWLEDGEMENT ABSTRACT ABSTRAK TABLE OF CONTENTS LIST OF TABLES LIST OF FIGURES LIST OF ABREVIATIONS LIST OF SYMBOLS LIST OF APPENDICES
vii TABLES OF CONTENTS CHAPTER TITLE PAGE DECLARATION DEDICATION ACKNOWLEDGEMENT ABSTRACT ABSTRAK TABLE OF CONTENTS LIST OF TABLES LIST OF FIGURES LIST OF ABREVIATIONS LIST OF SYMBOLS LIST OF APPENDICES
TECHNICAL REPORT. NADS MiniSim Driving Simulator. Document ID: N Author(s): Yefei He Date: September 2006
: Yefei He Date: September 2006") TECHNICAL REPORT NADS MiniSim Driving Simulator Document ID: N06-025 Author(s): Yefei He Date: September 2006 National Advanced Driving Simulator 2401 Oakdale Blvd. Iowa City, IA 52242-5003 Fax (319) 335-4658
TECHNICAL REPORT NADS MiniSim Driving Simulator Document ID: N06-025 Author(s): Yefei He Date: September 2006 National Advanced Driving Simulator 2401 Oakdale Blvd. Iowa City, IA 52242-5003 Fax (319) 335-4658
An Integrated Modeling and Simulation Methodology for Intelligent Systems Design and Testing
 An Integrated ing and Simulation Methodology for Intelligent Systems Design and Testing Xiaolin Hu and Bernard P. Zeigler Arizona Center for Integrative ing and Simulation The University of Arizona Tucson,
An Integrated ing and Simulation Methodology for Intelligent Systems Design and Testing Xiaolin Hu and Bernard P. Zeigler Arizona Center for Integrative ing and Simulation The University of Arizona Tucson,
The SeMiFOT project and other Swedish FOT Activities
 The SeMiFOT project and other Swedish FOT Activities First name: Trent Last name: Victor SAFER 25/09/08, First Stakeholder Meeting, Brussels Outline 1. Background SAFER 2. Background FOT & NDS 3. SeMiFOT
The SeMiFOT project and other Swedish FOT Activities First name: Trent Last name: Victor SAFER 25/09/08, First Stakeholder Meeting, Brussels Outline 1. Background SAFER 2. Background FOT & NDS 3. SeMiFOT
Lab 2: Quanser Hardware and Proportional Control
 I. Objective The goal of this lab is: Lab 2: Quanser Hardware and Proportional Control a. Familiarize students with Quanser's QuaRC tools and the Q4 data acquisition board. b. Derive and understand a model
I. Objective The goal of this lab is: Lab 2: Quanser Hardware and Proportional Control a. Familiarize students with Quanser's QuaRC tools and the Q4 data acquisition board. b. Derive and understand a model
Success Story. An innovative HIL Test Bench to Validate Embedded SOCOMEC Inverter Software
 An innovative HIL Test Bench to Validate Embedded SOCOMEC Inverter Software SOCOMEC is represented on 5 continents, either through direct affiliates or distributors. Thanks to its commitment to innovation,
An innovative HIL Test Bench to Validate Embedded SOCOMEC Inverter Software SOCOMEC is represented on 5 continents, either through direct affiliates or distributors. Thanks to its commitment to innovation,
STAGES-IBM RTC INTERFACE IN PRACTICE MICHAEL NERKAMP ROBERT BOSCH GMBH STAGES INSIGHTS, MARCH 14 TH 2018
 STAGES-IBM RTC INTERFACE IN PRACTICE MICHAEL NERKAMP ROBERT BOSCH GMBH STAGES INSIGHTS, MARCH 14 TH 2018 Michael Nerkamp Member of Engineering Process Group in Chassis Systems Control (CC) Development
STAGES-IBM RTC INTERFACE IN PRACTICE MICHAEL NERKAMP ROBERT BOSCH GMBH STAGES INSIGHTS, MARCH 14 TH 2018 Michael Nerkamp Member of Engineering Process Group in Chassis Systems Control (CC) Development
Developing a New Type of Light System in an Automobile and Implementing Its Prototype. on Hazards
 page Seite 12 KIT Developing a New Type of Light System in an Automobile and Implementing Its Prototype Spotlight on Hazards An innovative new light function offers motorists more safety and comfort during
page Seite 12 KIT Developing a New Type of Light System in an Automobile and Implementing Its Prototype Spotlight on Hazards An innovative new light function offers motorists more safety and comfort during
A Winning Combination
 A Winning Combination Risk factors Statements in this presentation that refer to future plans and expectations are forward-looking statements that involve a number of risks and uncertainties. Words such
A Winning Combination Risk factors Statements in this presentation that refer to future plans and expectations are forward-looking statements that involve a number of risks and uncertainties. Words such
Virtual Validation with dspace Benefits the whole ECU development process
 www.dspace.com Virtual Validation with dspace Benefits the whole ECU development process Virtual Validation / Content Virtual Validation Virtual Validation 3 Definition of a Virtual ECU 4 Tool Chain for
www.dspace.com Virtual Validation with dspace Benefits the whole ECU development process Virtual Validation / Content Virtual Validation Virtual Validation 3 Definition of a Virtual ECU 4 Tool Chain for
Industrial Keynotes. 06/09/2018 Juan-Les-Pins
 Industrial Keynotes 1 06/09/2018 Juan-Les-Pins Agenda 1. The End of Driving Simulation? 2. Autonomous Vehicles: the new UI 3. Augmented Realities 4. Choose your factions 5. No genuine AI without flawless
Industrial Keynotes 1 06/09/2018 Juan-Les-Pins Agenda 1. The End of Driving Simulation? 2. Autonomous Vehicles: the new UI 3. Augmented Realities 4. Choose your factions 5. No genuine AI without flawless
Modeling and Simulation in Embedded Systems for Off-Highway Vehicles
 Modeling and Simulation in Embedded Systems for Off-Highway Vehicles By Jason Mowry, DISTek Integration, Inc. Abstract: Over the last decade, modeling and simulation has proven itself by providing an analytical
Modeling and Simulation in Embedded Systems for Off-Highway Vehicles By Jason Mowry, DISTek Integration, Inc. Abstract: Over the last decade, modeling and simulation has proven itself by providing an analytical
NUMERICAL METHODOLOGY FOR THE EMI RISK ASSESSMENT OF VEHICULAR ANTENNAS
 NUMERICAL METHODOLOGY FOR THE EMI RISK ASSESSMENT OF VEHICULAR ANTENNAS Alberto Buttiglieri EMEA Product Development Electrical Electronics Unit Audio & Telematics Darmstadt, Germany Content Automotive
NUMERICAL METHODOLOGY FOR THE EMI RISK ASSESSMENT OF VEHICULAR ANTENNAS Alberto Buttiglieri EMEA Product Development Electrical Electronics Unit Audio & Telematics Darmstadt, Germany Content Automotive
Software Computer Vision - Driver Assistance
 Software Computer Vision - Driver Assistance Work @Bosch for developing desktop, web or embedded software and algorithms / computer vision / artificial intelligence for Driver Assistance Systems and Automated
Software Computer Vision - Driver Assistance Work @Bosch for developing desktop, web or embedded software and algorithms / computer vision / artificial intelligence for Driver Assistance Systems and Automated
HCM1A1305 Automotive grade High current power inductors
 Technical Data Effective September HCMA Automotive grade High current power inductors Product features AEC-Q Grade qualified High current carrying capacity Magnetically shielded, low EMI Frequency range
Technical Data Effective September HCMA Automotive grade High current power inductors Product features AEC-Q Grade qualified High current carrying capacity Magnetically shielded, low EMI Frequency range
Minimizing Distraction While Adding Features
 Minimizing Distraction While Adding Features Lisa Southwick, UX Manager Hyundai American Technical Center, Inc. Agenda Distracted Driving Advanced Driver Assistance Systems (ADAS) ADAS User Experience
Minimizing Distraction While Adding Features Lisa Southwick, UX Manager Hyundai American Technical Center, Inc. Agenda Distracted Driving Advanced Driver Assistance Systems (ADAS) ADAS User Experience
CMRE La Spezia, Italy
 Innovative Interoperable M&S within Extended Maritime Domain for Critical Infrastructure Protection and C-IED CMRE La Spezia, Italy Agostino G. Bruzzone 1,2, Alberto Tremori 1 1 NATO STO CMRE& 2 Genoa
Innovative Interoperable M&S within Extended Maritime Domain for Critical Infrastructure Protection and C-IED CMRE La Spezia, Italy Agostino G. Bruzzone 1,2, Alberto Tremori 1 1 NATO STO CMRE& 2 Genoa
Embracing Complexity. Gavin Walker Development Manager
 Embracing Complexity Gavin Walker Development Manager 1 MATLAB and Simulink Proven Ability to Make the Complex Simpler 1970 Stanford Ph.D. thesis, with thousands of lines of Fortran code 2 MATLAB and Simulink
Embracing Complexity Gavin Walker Development Manager 1 MATLAB and Simulink Proven Ability to Make the Complex Simpler 1970 Stanford Ph.D. thesis, with thousands of lines of Fortran code 2 MATLAB and Simulink
Intelligent Driving Agents
 Intelligent Driving Agents The agent approach to tactical driving in autonomous vehicles and traffic simulation Presentation Master s thesis Patrick Ehlert January 29 th, 2001 Imagine. Sensors Actuators
Intelligent Driving Agents The agent approach to tactical driving in autonomous vehicles and traffic simulation Presentation Master s thesis Patrick Ehlert January 29 th, 2001 Imagine. Sensors Actuators
WaveAce Integration with WaveStation
 WaveAce Integration with WaveStation APPLICATION BRIEF August 3, 2012 Summary Debugging sometimes requires transfer of signals from oscilloscope to waveform generator. This document describes how to transfer
WaveAce Integration with WaveStation APPLICATION BRIEF August 3, 2012 Summary Debugging sometimes requires transfer of signals from oscilloscope to waveform generator. This document describes how to transfer
MMC (Modular Multilevel Converter)
") MMC (Modular Multilevel Converter) Lisbon September 29 2017 Susana Apiñániz Smart Grids Energy and environment Division Tecnalia susana.apinaniz@tecnalia.com INDEX 1. General information 2. Power sub-modules
MMC (Modular Multilevel Converter) Lisbon September 29 2017 Susana Apiñániz Smart Grids Energy and environment Division Tecnalia susana.apinaniz@tecnalia.com INDEX 1. General information 2. Power sub-modules
Link: https://www.springerprofessional.de/en/virtual-test-driving-hardware-independent-integration-of-series-/
 Link: https://www.springerprofessional.de/en/virtual-test-driving-hardware-independent-integration-of-series-/6429576 DEVELOPMENT SIMUL ATION VIRTUAL TEST DRIVING HARDWARE-INDEPENDENT INTEGRATION OF SERIES
Link: https://www.springerprofessional.de/en/virtual-test-driving-hardware-independent-integration-of-series-/6429576 DEVELOPMENT SIMUL ATION VIRTUAL TEST DRIVING HARDWARE-INDEPENDENT INTEGRATION OF SERIES
Combining ROS and AI for fail-operational automated driving
 Combining ROS and AI for fail-operational automated driving Prof. Dr. Daniel Watzenig Virtual Vehicle Research Center, Graz, Austria and Institute of Automation and Control at Graz University of Technology
Combining ROS and AI for fail-operational automated driving Prof. Dr. Daniel Watzenig Virtual Vehicle Research Center, Graz, Austria and Institute of Automation and Control at Graz University of Technology
E x p e r i m e n t 3 Characterization of DC Motor: Part 1
 E x p e r i m e n t 3 Characterization of DC Motor: Part 1 3.1 Introduction The output voltage control of a two-pole DC-Switch-mode-converter was implemented in realtime, in the last experiment. The purpose
E x p e r i m e n t 3 Characterization of DC Motor: Part 1 3.1 Introduction The output voltage control of a two-pole DC-Switch-mode-converter was implemented in realtime, in the last experiment. The purpose
Assessment of High-Integrity Embedded Automotive Control Systems using Hardware in the Loop Simulation
 Paper Preprint To Appear In: Journal of Systems and Software, 2008 Assessment of High-Integrity Embedded Automotive Control Systems using Hardware in the Loop Simulation Michael Short and Michael J. Pont
Paper Preprint To Appear In: Journal of Systems and Software, 2008 Assessment of High-Integrity Embedded Automotive Control Systems using Hardware in the Loop Simulation Michael Short and Michael J. Pont
HAVEit Highly Automated Vehicles for Intelligent Transport
 HAVEit Highly Automated Vehicles for Intelligent Transport Holger Zeng Project Manager CONTINENTAL AUTOMOTIVE HAVEit General Information Project full title: Highly Automated Vehicles for Intelligent Transport
HAVEit Highly Automated Vehicles for Intelligent Transport Holger Zeng Project Manager CONTINENTAL AUTOMOTIVE HAVEit General Information Project full title: Highly Automated Vehicles for Intelligent Transport
Cruden motion simulators for vehicle development and testing
 Cruden motion simulators for vehicle development and testing Increasing numbers of automotive OEM departments, their suppliers and automotive research institutes are working with Cruden to significantly
Cruden motion simulators for vehicle development and testing Increasing numbers of automotive OEM departments, their suppliers and automotive research institutes are working with Cruden to significantly
Cruden Panthera simulator software suite
 Cruden simulator software suite Automotive OEM departments and first tier companies, motorsport teams, universities and research institutes use Cruden simulators to significantly reduce the cost and time
Cruden simulator software suite Automotive OEM departments and first tier companies, motorsport teams, universities and research institutes use Cruden simulators to significantly reduce the cost and time
Connected Car Networking
 Connected Car Networking Teng Yang, Francis Wolff and Christos Papachristou Electrical Engineering and Computer Science Case Western Reserve University Cleveland, Ohio Outline Motivation Connected Car
Connected Car Networking Teng Yang, Francis Wolff and Christos Papachristou Electrical Engineering and Computer Science Case Western Reserve University Cleveland, Ohio Outline Motivation Connected Car
DRA. Automotive grade High power density, high efficiency, shielded drum core power inductors. Technical Data Applications.
 Supersedes September 2017 High power density, high efficiency, shielded drum core power inductors Applications Body electronics o Headlamps, tail lamps and interior lighting o Heating Ventilation and Air
Supersedes September 2017 High power density, high efficiency, shielded drum core power inductors Applications Body electronics o Headlamps, tail lamps and interior lighting o Heating Ventilation and Air
HIL Simulation Lab Work
 2017.03.09 HIL Simulation Lab Work with Step by Step Exercises that you can do in your own Pace http://home.hit.no/~hansha/?lab=hilsim Hans-Petter Halvorsen Introduction to HIL Lab Work Hans-Petter Halvorsen
2017.03.09 HIL Simulation Lab Work with Step by Step Exercises that you can do in your own Pace http://home.hit.no/~hansha/?lab=hilsim Hans-Petter Halvorsen Introduction to HIL Lab Work Hans-Petter Halvorsen
Course Introduction Purpose Objectives Content Learning Time
 Course Introduction Purpose This course discusses techniques for analyzing and eliminating noise in microcontroller (MCU) and microprocessor (MPU) based embedded systems. Objectives Learn about a method
Course Introduction Purpose This course discusses techniques for analyzing and eliminating noise in microcontroller (MCU) and microprocessor (MPU) based embedded systems. Objectives Learn about a method
Embedded Control Systems
 Embedded Control Systems Lecture: MW 130-3PM 1311 EECS Labs: 4342 EECS Jeff Cook jeffcook@eecs.umich.edu Office: 4238 EECS Zhaori Cong (Thursday 9:30) zcong@umich.edu Jeff Roder (Tuesday, Thursday 1:30)
Embedded Control Systems Lecture: MW 130-3PM 1311 EECS Labs: 4342 EECS Jeff Cook jeffcook@eecs.umich.edu Office: 4238 EECS Zhaori Cong (Thursday 9:30) zcong@umich.edu Jeff Roder (Tuesday, Thursday 1:30)
Real Time Implementation of Power Electronics System
 Real Time Implementation of Power Electronics System Prof.Darshan S.Patel M.Tech (Power Electronics & Drives) Assistant Professor,Department of Electrical Engineering Sankalchand Patel College of Engineerig-Visnagar
Real Time Implementation of Power Electronics System Prof.Darshan S.Patel M.Tech (Power Electronics & Drives) Assistant Professor,Department of Electrical Engineering Sankalchand Patel College of Engineerig-Visnagar
Automotive grade Dual winding, high power density shielded drum core power inductors
 Supersedes September 07 Dual winding, high power density shielded drum core power inductors Product features AEC-Q00 qualified Dual winding inductors that can be used as a single inductor, SEPIC, Flyback,
Supersedes September 07 Dual winding, high power density shielded drum core power inductors Product features AEC-Q00 qualified Dual winding inductors that can be used as a single inductor, SEPIC, Flyback,
Driver-in-the-Loop: Simulation as a Highway Safety Tool SHAWN ALLEN NATIONAL ADVANCED DRIVING SIMULATOR (NADS) THE UNIVERSITY OF IOWA
 THE UNIVERSITY OF IOWA") Driver-in-the-Loop: Simulation as a Highway Safety Tool SHAWN ALLEN NATIONAL ADVANCED DRIVING SIMULATOR (NADS) THE UNIVERSITY OF IOWA Shawn Allen Iowa Driving Simulator 3D support for Automated Highway
Driver-in-the-Loop: Simulation as a Highway Safety Tool SHAWN ALLEN NATIONAL ADVANCED DRIVING SIMULATOR (NADS) THE UNIVERSITY OF IOWA Shawn Allen Iowa Driving Simulator 3D support for Automated Highway
VSI Labs The Build Up of Automated Driving
 VSI Labs The Build Up of Automated Driving October - 2017 Agenda Opening Remarks Introduction and Background Customers Solutions VSI Labs Some Industry Content Opening Remarks Automated vehicle systems
VSI Labs The Build Up of Automated Driving October - 2017 Agenda Opening Remarks Introduction and Background Customers Solutions VSI Labs Some Industry Content Opening Remarks Automated vehicle systems
FAIL OPERATIONAL E/E SYSTEM CONCEPT FOR FUTURE APPLICATION IN ADAS AND AUTONOMOUS DRIVING
 FAIL OPERATIONAL E/E SYSTEM CONCEPT FOR FUTURE APPLICATION IN ADAS AND AUTONOMOUS DRIVING Fail Safe Fail Operational Fault Tolerance ISO 26262 Hermann Kränzle, TÜV NORD Systems OUR FUNCTIONAL SAFETY CERTIFIED
FAIL OPERATIONAL E/E SYSTEM CONCEPT FOR FUTURE APPLICATION IN ADAS AND AUTONOMOUS DRIVING Fail Safe Fail Operational Fault Tolerance ISO 26262 Hermann Kränzle, TÜV NORD Systems OUR FUNCTIONAL SAFETY CERTIFIED
ELECTRIC MOTION SPECIALISTS
 E2m technologies PRODUCT BROCHURE 2012/2013 MOTION SIMULATION - CONTROL FORCE SIMULATION ELECTRIC MOTION SPECIALISTS E2M PROFESSIONAL MOTION AND CONTROL FORCE SIMULATION WWW.E2MTECHNOLOGIES.EU - 2 APPLICATIONS
E2m technologies PRODUCT BROCHURE 2012/2013 MOTION SIMULATION - CONTROL FORCE SIMULATION ELECTRIC MOTION SPECIALISTS E2M PROFESSIONAL MOTION AND CONTROL FORCE SIMULATION WWW.E2MTECHNOLOGIES.EU - 2 APPLICATIONS
Automated Industrial Wind Tunnel Network Control with LabVIEW. Matt Draear
 Automated Industrial Wind Tunnel Network Control with LabVIEW Matt Draear Advisor: Dr. Malinowski 1 Presentation Outline Overview of Old Hardware Overview of New Hardware Details of New Hardware FPGA LabVIEW
Automated Industrial Wind Tunnel Network Control with LabVIEW Matt Draear Advisor: Dr. Malinowski 1 Presentation Outline Overview of Old Hardware Overview of New Hardware Details of New Hardware FPGA LabVIEW
Using FMI/ SSP for Development of Autonomous Driving
 Using FMI/ SSP for Development of Autonomous Driving presented by Jochen Köhler (ZF) FMI User Meeting 15.05.2017 Prague / Czech Republic H.M. Heinkel S.Rude P. R. Mai J. Köhler M. Rühl / A. Pillekeit Motivation
Using FMI/ SSP for Development of Autonomous Driving presented by Jochen Köhler (ZF) FMI User Meeting 15.05.2017 Prague / Czech Republic H.M. Heinkel S.Rude P. R. Mai J. Köhler M. Rühl / A. Pillekeit Motivation
ROBOTICS & EMBEDDED SYSTEMS
 ROBOTICS & EMBEDDED SYSTEMS By, DON DOMINIC 29 S3 ECE CET EMBEDDED SYSTEMS small scale computers perform a specific task single component(hardware + software)- embedded after design, incapable of changing
ROBOTICS & EMBEDDED SYSTEMS By, DON DOMINIC 29 S3 ECE CET EMBEDDED SYSTEMS small scale computers perform a specific task single component(hardware + software)- embedded after design, incapable of changing
Hardware-In-the-Loop Simulation of Power Drives with RT-LAB
 Hardware-In-the-Loop Simulation of Power Drives with RT-LAB Christian Dufour, Simon Abourida, Jean Bélanger Opal-RT Technologies inc. 1751 Richardson, #2525 Montreal (Quebec), H3K 1G6, Canada {christian.dufour,
Hardware-In-the-Loop Simulation of Power Drives with RT-LAB Christian Dufour, Simon Abourida, Jean Bélanger Opal-RT Technologies inc. 1751 Richardson, #2525 Montreal (Quebec), H3K 1G6, Canada {christian.dufour,
Vehicle Hardware-In-the-Loop System for ADAS Virtual Testing
 11 Vehicle Hardware-In-the-Loop System for ADAS Virtual Testing Romain Rossi, Clément Galko, Hariharan Narasimman and Xavier Savatier Univ. Rouen, UNIROUEN, ESIGELEC, IRSEEM 76000 Rouen, France 11.1 Introduction
11 Vehicle Hardware-In-the-Loop System for ADAS Virtual Testing Romain Rossi, Clément Galko, Hariharan Narasimman and Xavier Savatier Univ. Rouen, UNIROUEN, ESIGELEC, IRSEEM 76000 Rouen, France 11.1 Introduction
E x p e r i m e n t 2 S i m u l a t i o n a n d R e a l - t i m e I m p l e m e n t a t i o n o f a S w i t c h - m o d e D C C o n v e r t e r
 E x p e r i m e n t 2 S i m u l a t i o n a n d R e a l - t i m e I m p l e m e n t a t i o n o f a S w i t c h - m o d e D C C o n v e r t e r IT IS PREFERED that students ANSWER THE QUESTION/S BEFORE
E x p e r i m e n t 2 S i m u l a t i o n a n d R e a l - t i m e I m p l e m e n t a t i o n o f a S w i t c h - m o d e D C C o n v e r t e r IT IS PREFERED that students ANSWER THE QUESTION/S BEFORE
STATE OF CHARGE BASED DROOP SURFACE FOR OPTIMAL CONTROL OF DC MICROGRIDS
 Michigan Technological University Digital Commons @ Michigan Tech Dissertations, Master's Theses and Master's Reports - Open Dissertations, Master's Theses and Master's Reports 2014 STATE OF CHARGE BASED
Michigan Technological University Digital Commons @ Michigan Tech Dissertations, Master's Theses and Master's Reports - Open Dissertations, Master's Theses and Master's Reports 2014 STATE OF CHARGE BASED
GNC/AOCS DEVELOPMENT SYSTEM FOR RENDEZ-VOUS AND DOCKING MISSIONS AT SENER, AND ASSOCIATED TEST FACILITIES
 . GNC/AOCS DEVELOPMENT SYSTEM FOR RENDEZ-VOUS AND DOCKING MISSIONS AT SENER, AND ASSOCIATED TEST FACILITIES Gonzalo Saavedra, Antonio Ayuso, Juan Manuel del Cura, Jose Maria Fernandez, Salvador Llorente,
. GNC/AOCS DEVELOPMENT SYSTEM FOR RENDEZ-VOUS AND DOCKING MISSIONS AT SENER, AND ASSOCIATED TEST FACILITIES Gonzalo Saavedra, Antonio Ayuso, Juan Manuel del Cura, Jose Maria Fernandez, Salvador Llorente,
Autonomous Automation: How do we get to a Million Miles of testing?
 Autonomous Automation: How do we get to a Million Miles of testing? Jace Allen Business Development Manager Simulation, Test, and EEDM dspace Inc. 50131 Pontiac Trail Wixom, MI 48393 USA 1 Agenda 1. Intro
Autonomous Automation: How do we get to a Million Miles of testing? Jace Allen Business Development Manager Simulation, Test, and EEDM dspace Inc. 50131 Pontiac Trail Wixom, MI 48393 USA 1 Agenda 1. Intro
ECE 5670/6670 Project. Brushless DC Motor Control with 6-Step Commutation. Objectives
 ECE 5670/6670 Project Brushless DC Motor Control with 6-Step Commutation Objectives The objective of the project is to build a circuit for 6-step commutation of a brushless DC motor and to implement control
ECE 5670/6670 Project Brushless DC Motor Control with 6-Step Commutation Objectives The objective of the project is to build a circuit for 6-step commutation of a brushless DC motor and to implement control
Success Story. 1. Context
 Collaboration between VIZIMAX and OPAL-RT leads to early certification of the VIZIMAX PMU and to the validation of OPAL-RT s accurate PMU algorithm test suite against official certification lab results.
Collaboration between VIZIMAX and OPAL-RT leads to early certification of the VIZIMAX PMU and to the validation of OPAL-RT s accurate PMU algorithm test suite against official certification lab results.
Model-Based Design as an Enabler for Supply Chain Collaboration
 CO-DEVELOPMENT MANUFACTURING INNOVATION & SUPPORT Model-Based Design as an Enabler for Supply Chain Collaboration Richard Mijnheer, CEO, 3T Stephan van Beek, Technical Manager, MathWorks Richard Mijnheer
CO-DEVELOPMENT MANUFACTURING INNOVATION & SUPPORT Model-Based Design as an Enabler for Supply Chain Collaboration Richard Mijnheer, CEO, 3T Stephan van Beek, Technical Manager, MathWorks Richard Mijnheer
Development and Validation of Virtual Driving Simulator for the Spinal Injury Patient
 CYBERPSYCHOLOGY & BEHAVIOR Volume 5, Number 2, 2002 Mary Ann Liebert, Inc. Development and Validation of Virtual Driving Simulator for the Spinal Injury Patient JEONG H. KU, M.S., 1 DONG P. JANG, Ph.D.,
CYBERPSYCHOLOGY & BEHAVIOR Volume 5, Number 2, 2002 Mary Ann Liebert, Inc. Development and Validation of Virtual Driving Simulator for the Spinal Injury Patient JEONG H. KU, M.S., 1 DONG P. JANG, Ph.D.,
A Real-Time Multi Electrical System Integrated Simulator (MESIS) for Validation and Testing of More Electric Aircraft (MEA) Equipment
 for Validation and Testing of More Electric Aircraft (MEA) Equipment") A Real-Time Multi Electrical System Integrated Simulator (MESIS) for Validation and Testing of More Electric Aircraft (MEA) Equipment M. Hicar (a), C. Fallaha (b) and J-N. Paquin (c) (a) Bombardier Aerospace,
A Real-Time Multi Electrical System Integrated Simulator (MESIS) for Validation and Testing of More Electric Aircraft (MEA) Equipment M. Hicar (a), C. Fallaha (b) and J-N. Paquin (c) (a) Bombardier Aerospace,
Automotive Control Solution for Brushless DC Motors
 Page 1 Automotive Control Solution for Brushless DC Motors TTTech provides solutions for setting up distributed systems with brushless DC motors. Today brushless DC motors are used in a variety of applications.
Page 1 Automotive Control Solution for Brushless DC Motors TTTech provides solutions for setting up distributed systems with brushless DC motors. Today brushless DC motors are used in a variety of applications.
Teleoperation and System Health Monitoring Mo-Yuen Chow, Ph.D.
 Teleoperation and System Health Monitoring Mo-Yuen Chow, Ph.D. chow@ncsu.edu Advanced Diagnosis and Control (ADAC) Lab Department of Electrical and Computer Engineering North Carolina State University
Teleoperation and System Health Monitoring Mo-Yuen Chow, Ph.D. chow@ncsu.edu Advanced Diagnosis and Control (ADAC) Lab Department of Electrical and Computer Engineering North Carolina State University
HCMA0703 Automotive grade High current power inductors
 Automotive grade High current power inductors Supersedes August 2014 Description Automotive grade 3 qualified High current carrying capacity, low core losses Magnetically shielded, low EMI Frequency range
Automotive grade High current power inductors Supersedes August 2014 Description Automotive grade 3 qualified High current carrying capacity, low core losses Magnetically shielded, low EMI Frequency range
Qosmotec. Software Solutions GmbH. Technical Overview. QPER C2X - Car-to-X Signal Strength Emulator and HiL Test Bench. Page 1
 Qosmotec Software Solutions GmbH Technical Overview QPER C2X - Page 1 TABLE OF CONTENTS 0 DOCUMENT CONTROL...3 0.1 Imprint...3 0.2 Document Description...3 1 SYSTEM DESCRIPTION...4 1.1 General Concept...4
Qosmotec Software Solutions GmbH Technical Overview QPER C2X - Page 1 TABLE OF CONTENTS 0 DOCUMENT CONTROL...3 0.1 Imprint...3 0.2 Document Description...3 1 SYSTEM DESCRIPTION...4 1.1 General Concept...4