Physics Based Sensor simulation
|
|
|
- Maximilian Adam Byrd
- 5 years ago
- Views:
Transcription

1 Physics Based Sensor simulation Jordan Gorrochotegui - Product Manager Software and Services Mike Phillips Software Engineer Restricted Siemens AG 2017 Realize innovation.



2 Siemens offers solutions across all automotive mega trends Autonomous Vehicles Electrified Vehicles Mobility Connected Vehicles Autonomous driving & driver assist systems Electric vehicles & supporting technology Smart fleets & multi-modal transport Connecting car, driver and infrastructure Engineering the next product not just the best product for the future







3 Validation and Verification framework for AVs Requirements 1M 10M scenarios Multiple variants V&V environments MiL / SiL / Cluster Requirements & system architectures Digital Twin World Digital Twin Vehicle 1k 10k scenarios HiL / DiL / ViL Simulation definition scenarios Proving ground / field test Certification - Homologation Real world Design adaptations (HW/SW) Vehicle under development Page 3
4 Validation and Verification framework for AVs Requirements 1M 10M scenarios Multiple variants V&V environments MiL / SiL / Cluster Requirements & system architectures Digital Twin World Digital Twin Vehicle 1k 10k scenarios HiL / DiL / ViL Simulation definition scenarios Proving ground / field test Certification - Homologation Real world Design adaptations (HW/SW) Vehicle under development Page 4


5 Example #1: MiL / SiL / Cluster V&V Environments MiL / SiL / Cluster Run massive amounts of Prescan scenarios for Automated Vehicle development and optimization 1k 10k scenarios HiL / DiL / ViL scenarios Laboratories / proving grounds / public roads Design space exploration using large scenario databases Virtual development, verification and robustness testing Optimized automated vehicle designs Page 5





6 Example #2: HiL testing of central AD processing unit V&V Environments MiL / SiL / Cluster PreScan synthetic sensor data injection for virtual validation of central AD processing units Automated Driving processing unit 1k 10k scenarios HiL / DiL / ViL Automated Driving system validation scenarios Laboratories / proving grounds / public roads Page 6 Training and evaluating Deep Neural Networks (DNNs) Virtual validation of automated driving processing units Accelerated automated vehicle development



7 Example #2: HiL testing of central AD processing unit Free space detection on Nvidia Drive PX2 Page 7

8 Example #2: HiL testing of central AD processing unit Object detection on Mentor DRS360 Page 8


9 PreScan HIL application examples V&V Environments MiL / SiL / Cluster 1k 10k scenarios HiL / DiL / ViL scenarios Laboratories / proving grounds / public roads Page 9


10 Example #3: Automated Driving physical validation V&V Environments MiL / SiL / Cluster TASS International Services and Siemens Testing Solutions for physical validation of automated and connected driving technology 1k 10k scenarios HiL / DiL / ViL scenarios Page 10 Laboratories / proving grounds / public roads Physical verification & validation services Certification of automated and connected systems Design consultancy for next-generation AD test facilities





11 Development of automated vehicles requires realistic sensor data Algorithm development Sensor development DNN Training Validation Page 11
?")

12 Two sources of sensor data + Real data - Expensive - Time consuming - Not (easily) repeatable - Requires a physical sensor - Must be annotated - Open loop (recorded)? Realistic data + Inexpensive + Fast to acquire + Perfect repeatability + Physical sensor not needed + Annotation is free + Can be closed loop Recorded Simulated Page 12






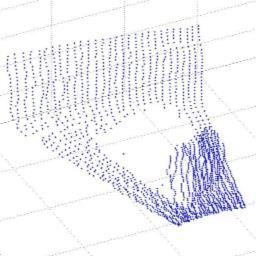
13 Camera & Ground Truth Radar & V2X Lidar & Point Cloud Page 13
14 We use simulation to compute real world effects on actual sensors Physical artefacts are faithfully reproduced Raw signal is computed Output verified & validated Distortions Multi-bounce Time effects Weather Lidar full-waveform signal Radar channel response Raw camera images Verify against real sensors Validate for specific use cases Page 14


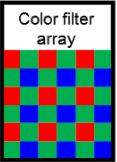


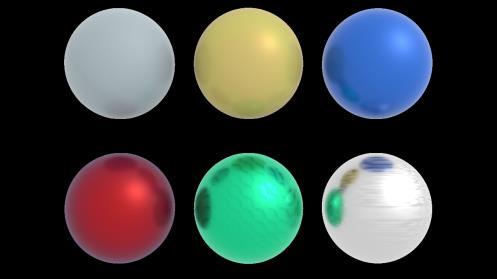
15 Color filter array Simulation Engine Beam cross section MTF Three key components are needed Physical Device World Page 15

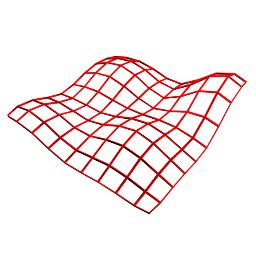
16 Physics Based Lidar Simulation Page 16



17 Our solutions support autonomous vehicle development needs Across all engineering domains Ensuring digital continuity, multi-domain traceability and functional safety of autonomous systems Page 17
Virtual Testing of Autonomous Vehicles
 Virtual Testing of Autonomous Vehicles Mike Dempsey Claytex Services Limited Software, Consultancy, Training Based in Leamington Spa, UK Office in Cape Town, South Africa Experts in Systems Engineering,
Virtual Testing of Autonomous Vehicles Mike Dempsey Claytex Services Limited Software, Consultancy, Training Based in Leamington Spa, UK Office in Cape Town, South Africa Experts in Systems Engineering,
Virtual Homologation of Software- Intensive Safety Systems: From ESC to Automated Driving
 Virtual Homologation of Software- Intensive Safety Systems: From ESC to Automated Driving Dr. Houssem Abdellatif Global Head Autonomous Driving & ADAS TÜV SÜD Auto Service Christian Gnandt Lead Engineer
Virtual Homologation of Software- Intensive Safety Systems: From ESC to Automated Driving Dr. Houssem Abdellatif Global Head Autonomous Driving & ADAS TÜV SÜD Auto Service Christian Gnandt Lead Engineer
VSI Labs The Build Up of Automated Driving
 VSI Labs The Build Up of Automated Driving October - 2017 Agenda Opening Remarks Introduction and Background Customers Solutions VSI Labs Some Industry Content Opening Remarks Automated vehicle systems
VSI Labs The Build Up of Automated Driving October - 2017 Agenda Opening Remarks Introduction and Background Customers Solutions VSI Labs Some Industry Content Opening Remarks Automated vehicle systems
David Howarth. Business Development Manager Americas
 David Howarth Business Development Manager Americas David Howarth IPG Automotive USA, Inc. Business Development Manager Americas david.howarth@ipg-automotive.com ni.com Testing Automated Driving Functions
David Howarth Business Development Manager Americas David Howarth IPG Automotive USA, Inc. Business Development Manager Americas david.howarth@ipg-automotive.com ni.com Testing Automated Driving Functions
ADAS Development using Advanced Real-Time All-in-the-Loop Simulators. Roberto De Vecchi VI-grade Enrico Busto - AddFor
 ADAS Development using Advanced Real-Time All-in-the-Loop Simulators Roberto De Vecchi VI-grade Enrico Busto - AddFor The Scenario The introduction of ADAS and AV has created completely new challenges
ADAS Development using Advanced Real-Time All-in-the-Loop Simulators Roberto De Vecchi VI-grade Enrico Busto - AddFor The Scenario The introduction of ADAS and AV has created completely new challenges
Significant Reduction of Validation Efforts for Dynamic Light Functions with FMI for Multi-Domain Integration and Test Platforms
 Significant Reduction of Validation Efforts for Dynamic Light Functions with FMI for Multi-Domain Integration and Test Platforms Dr. Stefan-Alexander Schneider Johannes Frimberger BMW AG, 80788 Munich,
Significant Reduction of Validation Efforts for Dynamic Light Functions with FMI for Multi-Domain Integration and Test Platforms Dr. Stefan-Alexander Schneider Johannes Frimberger BMW AG, 80788 Munich,
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS. Sergii Bykov Technical Lead Machine Learning 12 Oct 2017
 23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
Final Report Non Hit Car And Truck
 Final Report Non Hit Car And Truck 2010-2013 Project within Vehicle and Traffic Safety Author: Anders Almevad Date 2014-03-17 Content 1. Executive summary... 3 2. Background... 3. Objective... 4. Project
Final Report Non Hit Car And Truck 2010-2013 Project within Vehicle and Traffic Safety Author: Anders Almevad Date 2014-03-17 Content 1. Executive summary... 3 2. Background... 3. Objective... 4. Project
Autonomous Automation: How do we get to a Million Miles of testing?
 Autonomous Automation: How do we get to a Million Miles of testing? Jace Allen Business Development Manager Simulation, Test, and EEDM dspace Inc. 50131 Pontiac Trail Wixom, MI 48393 USA 1 Agenda 1. Intro
Autonomous Automation: How do we get to a Million Miles of testing? Jace Allen Business Development Manager Simulation, Test, and EEDM dspace Inc. 50131 Pontiac Trail Wixom, MI 48393 USA 1 Agenda 1. Intro
Intelligent driving TH« TNO I Innovation for live
 Intelligent driving TNO I Innovation for live TH«Intelligent Transport Systems have become an integral part of the world. In addition to the current ITS systems, intelligent vehicles can make a significant
Intelligent driving TNO I Innovation for live TH«Intelligent Transport Systems have become an integral part of the world. In addition to the current ITS systems, intelligent vehicles can make a significant
Automated Driving Systems with Model-Based Design for ISO 26262:2018 and SOTIF
 Automated Driving Systems with Model-Based Design for ISO 26262:2018 and SOTIF Konstantin Dmitriev The MathWorks, Inc. Certification and Standards Group 2018 The MathWorks, Inc. 1 Agenda Use of simulation
Automated Driving Systems with Model-Based Design for ISO 26262:2018 and SOTIF Konstantin Dmitriev The MathWorks, Inc. Certification and Standards Group 2018 The MathWorks, Inc. 1 Agenda Use of simulation
Vehicle-to-X communication using millimeter waves
 Infrastructure Person Vehicle 5G Slides Robert W. Heath Jr. (2016) Vehicle-to-X communication using millimeter waves Professor Robert W. Heath Jr., PhD, PE mmwave Wireless Networking and Communications
Infrastructure Person Vehicle 5G Slides Robert W. Heath Jr. (2016) Vehicle-to-X communication using millimeter waves Professor Robert W. Heath Jr., PhD, PE mmwave Wireless Networking and Communications
Industrial Keynotes. 06/09/2018 Juan-Les-Pins
 Industrial Keynotes 1 06/09/2018 Juan-Les-Pins Agenda 1. The End of Driving Simulation? 2. Autonomous Vehicles: the new UI 3. Augmented Realities 4. Choose your factions 5. No genuine AI without flawless
Industrial Keynotes 1 06/09/2018 Juan-Les-Pins Agenda 1. The End of Driving Simulation? 2. Autonomous Vehicles: the new UI 3. Augmented Realities 4. Choose your factions 5. No genuine AI without flawless
Combining ROS and AI for fail-operational automated driving
 Combining ROS and AI for fail-operational automated driving Prof. Dr. Daniel Watzenig Virtual Vehicle Research Center, Graz, Austria and Institute of Automation and Control at Graz University of Technology
Combining ROS and AI for fail-operational automated driving Prof. Dr. Daniel Watzenig Virtual Vehicle Research Center, Graz, Austria and Institute of Automation and Control at Graz University of Technology
Using FMI/ SSP for Development of Autonomous Driving
 Using FMI/ SSP for Development of Autonomous Driving presented by Jochen Köhler (ZF) FMI User Meeting 15.05.2017 Prague / Czech Republic H.M. Heinkel S.Rude P. R. Mai J. Köhler M. Rühl / A. Pillekeit Motivation
Using FMI/ SSP for Development of Autonomous Driving presented by Jochen Köhler (ZF) FMI User Meeting 15.05.2017 Prague / Czech Republic H.M. Heinkel S.Rude P. R. Mai J. Köhler M. Rühl / A. Pillekeit Motivation
Autonomous driving made safe
 tm Autonomous driving made safe Founder, Bio Celite Milbrandt Austin, Texas since 1998 Founder of Slacker Radio In dash for Tesla, GM, and Ford. 35M active users 2008 Chief Product Officer of RideScout
tm Autonomous driving made safe Founder, Bio Celite Milbrandt Austin, Texas since 1998 Founder of Slacker Radio In dash for Tesla, GM, and Ford. 35M active users 2008 Chief Product Officer of RideScout
interactive IP: Perception platform and modules
 interactive IP: Perception platform and modules Angelos Amditis, ICCS 19 th ITS-WC-SIS76: Advanced integrated safety applications based on enhanced perception, active interventions and new advanced sensors
interactive IP: Perception platform and modules Angelos Amditis, ICCS 19 th ITS-WC-SIS76: Advanced integrated safety applications based on enhanced perception, active interventions and new advanced sensors
Virtual testing by coupling high fidelity vehicle simulation with microscopic traffic flow simulation
 DYNA4 with DYNAanimation in Co-Simulation with SUMO vehicle under test Virtual testing by coupling high fidelity vehicle simulation with microscopic traffic flow simulation Dr.-Ing. Jakob Kaths TESIS GmbH
DYNA4 with DYNAanimation in Co-Simulation with SUMO vehicle under test Virtual testing by coupling high fidelity vehicle simulation with microscopic traffic flow simulation Dr.-Ing. Jakob Kaths TESIS GmbH
Dr George Gillespie. CEO HORIBA MIRA Ltd. Sponsors
 Dr George Gillespie CEO HORIBA MIRA Ltd Sponsors Intelligent Connected Vehicle Roadmap George Gillespie September 2017 www.automotivecouncil.co.uk ICV Roadmap built on Travellers Needs study plus extensive
Dr George Gillespie CEO HORIBA MIRA Ltd Sponsors Intelligent Connected Vehicle Roadmap George Gillespie September 2017 www.automotivecouncil.co.uk ICV Roadmap built on Travellers Needs study plus extensive
The Building Blocks of Autonomous Control. Phil Magney, Founder & Principal Advisor July 2016
 The Building Blocks of Autonomous Control Phil Magney, Founder & Principal Advisor July 2016 Agenda VSI Remarks The Building Blocks of Autonomy Elements of Autonomous Control Motion Control (path, maneuver,
The Building Blocks of Autonomous Control Phil Magney, Founder & Principal Advisor July 2016 Agenda VSI Remarks The Building Blocks of Autonomy Elements of Autonomous Control Motion Control (path, maneuver,
TECHNOLOGY DEVELOPMENT AREAS IN AAWA
 TECHNOLOGY DEVELOPMENT AREAS IN AAWA Technologies for realizing remote and autonomous ships exist. The task is to find the optimum way to combine them reliably and cost effecticely. Ship state definition
TECHNOLOGY DEVELOPMENT AREAS IN AAWA Technologies for realizing remote and autonomous ships exist. The task is to find the optimum way to combine them reliably and cost effecticely. Ship state definition
TRANSFORMING TRANSPORTATION WITH AI Danny Shapiro RBC May 31, 2018
 TRANSFORMING TRANSPORTATION WITH AI Danny Shapiro RBC May 31, 2018 SAFE HARBOR Forward-Looking Statements Except for the historical information contained herein, certain matters in this presentation including,
TRANSFORMING TRANSPORTATION WITH AI Danny Shapiro RBC May 31, 2018 SAFE HARBOR Forward-Looking Statements Except for the historical information contained herein, certain matters in this presentation including,
Automotive Needs and Expectations towards Next Generation Driving Simulation
 Automotive Needs and Expectations towards Next Generation Driving Simulation Dr. Hans-Peter Schöner - Insight fromoutside -Consulting - Senior Automotive Expert, Driving Simulation Association September
Automotive Needs and Expectations towards Next Generation Driving Simulation Dr. Hans-Peter Schöner - Insight fromoutside -Consulting - Senior Automotive Expert, Driving Simulation Association September
The 3xD Simulator for Intelligent Vehicles Professor Paul Jennings. 20 th October 2016
 The 3xD Simulator for Intelligent Vehicles Professor Paul Jennings 20 th October 2016 An academic department within the science faculty Established in 1980 by Professor Lord Bhattacharyya as Warwick Manufacturing
The 3xD Simulator for Intelligent Vehicles Professor Paul Jennings 20 th October 2016 An academic department within the science faculty Established in 1980 by Professor Lord Bhattacharyya as Warwick Manufacturing
THE NEXT WAVE OF COMPUTING. September 2017
 THE NEXT WAVE OF COMPUTING September 2017 SAFE HARBOR Forward-Looking Statements Except for the historical information contained herein, certain matters in this presentation including, but not limited
THE NEXT WAVE OF COMPUTING September 2017 SAFE HARBOR Forward-Looking Statements Except for the historical information contained herein, certain matters in this presentation including, but not limited
Method and Tools Specifications
 Method and Tools Deliverable n. D1.3.2 Method and Tools Sub Project SP1 Requirements and Workpackage WP1.2 Requirements Task n. T1.3.2 Method and Tools Authors N. Pallaro A. Ghiro CRF CRF File name Status
Method and Tools Deliverable n. D1.3.2 Method and Tools Sub Project SP1 Requirements and Workpackage WP1.2 Requirements Task n. T1.3.2 Method and Tools Authors N. Pallaro A. Ghiro CRF CRF File name Status
Perception platform and fusion modules results. Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event
 Perception platform and fusion modules results Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event 20 th -21 st November 2013 Agenda Introduction Environment Perception in Intelligent Transport
Perception platform and fusion modules results Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event 20 th -21 st November 2013 Agenda Introduction Environment Perception in Intelligent Transport
Video Injection Methods in a Real-world Vehicle for Increasing Test Efficiency
 DEVELOPMENT SIMUL ATION AND TESTING Video Injection Methods in a Real-world Vehicle for Increasing Test Efficiency IPG Automotive AUTHORS For the testing of camera-based driver assistance systems under
DEVELOPMENT SIMUL ATION AND TESTING Video Injection Methods in a Real-world Vehicle for Increasing Test Efficiency IPG Automotive AUTHORS For the testing of camera-based driver assistance systems under
A Roadmap for Connected & Autonomous Vehicles. David Skipp Ford Motor Company
 A Roadmap for Connected & Autonomous Vehicles David Skipp Ford Motor Company ! Why does an Autonomous Vehicle need a roadmap? Where might the roadmap take us? What should we focus on next? Why does an
A Roadmap for Connected & Autonomous Vehicles David Skipp Ford Motor Company ! Why does an Autonomous Vehicle need a roadmap? Where might the roadmap take us? What should we focus on next? Why does an
GNSS in Autonomous Vehicles MM Vision
 GNSS in Autonomous Vehicles MM Vision MM Technology Innovation Automated Driving Technologies (ADT) Evaldo Bruci Context & motivation Within the robotic paradigm Magneti Marelli chose Think & Decision
GNSS in Autonomous Vehicles MM Vision MM Technology Innovation Automated Driving Technologies (ADT) Evaldo Bruci Context & motivation Within the robotic paradigm Magneti Marelli chose Think & Decision
Transformation to Artificial Intelligence with MATLAB Roy Lurie, PhD Vice President of Engineering MATLAB Products
 Transformation to Artificial Intelligence with MATLAB Roy Lurie, PhD Vice President of Engineering MATLAB Products 2018 The MathWorks, Inc. 1 A brief history of the automobile First Commercial Gas Car
Transformation to Artificial Intelligence with MATLAB Roy Lurie, PhD Vice President of Engineering MATLAB Products 2018 The MathWorks, Inc. 1 A brief history of the automobile First Commercial Gas Car
Connected and Autonomous Technology Evaluation Center (CAVTEC) Overview. TennSMART Spring Meeting April 9 th, 2019
 Overview. TennSMART Spring Meeting April 9 th, 2019") Connected and Autonomous Technology Evaluation Center (CAVTEC) Overview TennSMART Spring Meeting April 9 th, 2019 Location Location Location Tennessee s Portal to Aerospace & Defense Technologies Mach
Connected and Autonomous Technology Evaluation Center (CAVTEC) Overview TennSMART Spring Meeting April 9 th, 2019 Location Location Location Tennessee s Portal to Aerospace & Defense Technologies Mach
Evaluation of Connected Vehicle Technology for Concept Proposal Using V2X Testbed
 AUTOMOTIVE Evaluation of Connected Vehicle Technology for Concept Proposal Using V2X Testbed Yoshiaki HAYASHI*, Izumi MEMEZAWA, Takuji KANTOU, Shingo OHASHI, and Koichi TAKAYAMA ----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
AUTOMOTIVE Evaluation of Connected Vehicle Technology for Concept Proposal Using V2X Testbed Yoshiaki HAYASHI*, Izumi MEMEZAWA, Takuji KANTOU, Shingo OHASHI, and Koichi TAKAYAMA ----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
Testing in the Google car era Are we ready?
 Testing in the Google car era Are we ready? Prof. Massimo Violante Politecnico di Torino Dep. of Control and Computer Engineering Nicola Frisco TXT e-solutions Head of Simulation & Training Systems The
Testing in the Google car era Are we ready? Prof. Massimo Violante Politecnico di Torino Dep. of Control and Computer Engineering Nicola Frisco TXT e-solutions Head of Simulation & Training Systems The
SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results
 SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results Angelos Amditis (ICCS) and Lali Ghosh (DEL) 18 th October 2013 20 th ITS World
SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results Angelos Amditis (ICCS) and Lali Ghosh (DEL) 18 th October 2013 20 th ITS World
March 10, Greenbelt Road, Suite 400, Greenbelt, MD Tel: (301) Fax: (301)
 Fax: (301)") Detection of High Risk Intersections Using Synthetic Machine Vision John Alesse, john.alesse.ctr@dot.gov Brian O Donnell, brian.odonnell.ctr@dot.gov Stinger Ghaffarian Technologies, Inc. Cambridge, Massachusetts
Detection of High Risk Intersections Using Synthetic Machine Vision John Alesse, john.alesse.ctr@dot.gov Brian O Donnell, brian.odonnell.ctr@dot.gov Stinger Ghaffarian Technologies, Inc. Cambridge, Massachusetts
What is New in Wireless System Design
 What is New in Wireless System Design Houman Zarrinkoub, PhD. houmanz@mathworks.com 2015 The MathWorks, Inc. 1 Agenda Landscape of Wireless Design Our Wireless Initiatives Antenna-to-Bit simulation Smart
What is New in Wireless System Design Houman Zarrinkoub, PhD. houmanz@mathworks.com 2015 The MathWorks, Inc. 1 Agenda Landscape of Wireless Design Our Wireless Initiatives Antenna-to-Bit simulation Smart
CMRE La Spezia, Italy
 Innovative Interoperable M&S within Extended Maritime Domain for Critical Infrastructure Protection and C-IED CMRE La Spezia, Italy Agostino G. Bruzzone 1,2, Alberto Tremori 1 1 NATO STO CMRE& 2 Genoa
Innovative Interoperable M&S within Extended Maritime Domain for Critical Infrastructure Protection and C-IED CMRE La Spezia, Italy Agostino G. Bruzzone 1,2, Alberto Tremori 1 1 NATO STO CMRE& 2 Genoa
ADAS/AD Challenge. Copyright 2017, dspace GmbH
 ADAS/AD Challenge 2 dspace Automotive Simulation Models (ASM) for ADAS and AD Michael Peperhowe, Group Manager ASM VD & Traffic dspace GmbH Rathenaustr. 26 33102 Paderborn Germany 3 ASM Overview 4 ASM
ADAS/AD Challenge 2 dspace Automotive Simulation Models (ASM) for ADAS and AD Michael Peperhowe, Group Manager ASM VD & Traffic dspace GmbH Rathenaustr. 26 33102 Paderborn Germany 3 ASM Overview 4 ASM
Embracing Complexity. Gavin Walker Development Manager
 Embracing Complexity Gavin Walker Development Manager 1 MATLAB and Simulink Proven Ability to Make the Complex Simpler 1970 Stanford Ph.D. thesis, with thousands of lines of Fortran code 2 MATLAB and Simulink
Embracing Complexity Gavin Walker Development Manager 1 MATLAB and Simulink Proven Ability to Make the Complex Simpler 1970 Stanford Ph.D. thesis, with thousands of lines of Fortran code 2 MATLAB and Simulink
I E E E 5 G W O R L D F O R U M 5 G I N N O V A T I O N S & C H A L L E N G E S
 I E E E 5 G W O R L D F O R U M 5 G I N N O V A T I O N S & C H A L L E N G E S David Lu Vice President, ECOMP Platform & Systems Development AT&T 2018 AT&T Intellectual Property. All Rights Reserved.
I E E E 5 G W O R L D F O R U M 5 G I N N O V A T I O N S & C H A L L E N G E S David Lu Vice President, ECOMP Platform & Systems Development AT&T 2018 AT&T Intellectual Property. All Rights Reserved.
KÜNSTLICHE INTELLIGENZ JOBKILLER VON MORGEN?
 KÜNSTLICHE INTELLIGENZ JOBKILLER VON MORGEN? Marc Stampfli https://www.linkedin.com/in/marcstampfli/ https://twitter.com/marc_stampfli E-Mail: mstampfli@nvidia.com INTELLIGENT ROBOTS AND SMART MACHINES
KÜNSTLICHE INTELLIGENZ JOBKILLER VON MORGEN? Marc Stampfli https://www.linkedin.com/in/marcstampfli/ https://twitter.com/marc_stampfli E-Mail: mstampfli@nvidia.com INTELLIGENT ROBOTS AND SMART MACHINES
Vehicle-in-the-loop: Innovative Testing Method for Cognitive Vehicles
 Dr.-Ing. Thomas Schamm, M.Sc. Marc René Zofka, Dipl.-Inf. Tobias Bär Technical Cognitive Assistance Systems FZI Research Center for Information Technology FZI FORSCHUNGSZENTRUM INFORMATIK Vehicle-in-the-loop:
Dr.-Ing. Thomas Schamm, M.Sc. Marc René Zofka, Dipl.-Inf. Tobias Bär Technical Cognitive Assistance Systems FZI Research Center for Information Technology FZI FORSCHUNGSZENTRUM INFORMATIK Vehicle-in-the-loop:
Wireless technologies Test systems
 Wireless technologies Test systems 8 Test systems for V2X communications Future automated vehicles will be wirelessly networked with their environment and will therefore be able to preventively respond
Wireless technologies Test systems 8 Test systems for V2X communications Future automated vehicles will be wirelessly networked with their environment and will therefore be able to preventively respond
A Winning Combination
 A Winning Combination Risk factors Statements in this presentation that refer to future plans and expectations are forward-looking statements that involve a number of risks and uncertainties. Words such
A Winning Combination Risk factors Statements in this presentation that refer to future plans and expectations are forward-looking statements that involve a number of risks and uncertainties. Words such
Israel Railways No Fault Liability Renewal The Implementation of New Technological Safety Devices at Level Crossings. Amos Gellert, Nataly Kats
 Mr. Amos Gellert Technological aspects of level crossing facilities Israel Railways No Fault Liability Renewal The Implementation of New Technological Safety Devices at Level Crossings Deputy General Manager
Mr. Amos Gellert Technological aspects of level crossing facilities Israel Railways No Fault Liability Renewal The Implementation of New Technological Safety Devices at Level Crossings Deputy General Manager
Paper EU-TP1157. Verifying automated driving systems in simulation: framework and challenges
 25 th ITS World Congress, Copenhagen, Denmark, 17-21 September 2018 Paper EU-TP1157 Verifying automated driving systems in simulation: framework and challenges Zeyn Saigol 1*, Alan Peters 1 1. Transport
25 th ITS World Congress, Copenhagen, Denmark, 17-21 September 2018 Paper EU-TP1157 Verifying automated driving systems in simulation: framework and challenges Zeyn Saigol 1*, Alan Peters 1 1. Transport
OASIS concept. Evangelos Bekiaris CERTH/HIT OASIS ISWC2011, 24 October, Bonn
 OASIS concept Evangelos Bekiaris CERTH/HIT The ageing of the population is changing also the workforce scenario in Europe: currently the ratio between working people and retired ones is equal to 4:1; drastic
OASIS concept Evangelos Bekiaris CERTH/HIT The ageing of the population is changing also the workforce scenario in Europe: currently the ratio between working people and retired ones is equal to 4:1; drastic
Author s Name Name of the Paper Session. DYNAMIC POSITIONING CONFERENCE October 10-11, 2017 SENSORS SESSION. Sensing Autonomy.
 Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 10-11, 2017 SENSORS SESSION Sensing Autonomy By Arne Rinnan Kongsberg Seatex AS Abstract A certain level of autonomy is already
Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 10-11, 2017 SENSORS SESSION Sensing Autonomy By Arne Rinnan Kongsberg Seatex AS Abstract A certain level of autonomy is already
REVOLUTIONIZING THE COMPUTING LANDSCAPE AND BEYOND.
 December 3-6, 2018 Santa Clara Convention Center CA, USA REVOLUTIONIZING THE COMPUTING LANDSCAPE AND BEYOND. https://tmt.knect365.com/risc-v-summit @risc_v ACCELERATING INFERENCING ON THE EDGE WITH RISC-V
December 3-6, 2018 Santa Clara Convention Center CA, USA REVOLUTIONIZING THE COMPUTING LANDSCAPE AND BEYOND. https://tmt.knect365.com/risc-v-summit @risc_v ACCELERATING INFERENCING ON THE EDGE WITH RISC-V
REGULATING AND ACCELERATING DEVELOPMENT OF HIGHLY AUTOMATED AND AUTONOMOUS VEHICLES THROUGH SIMULATION AND MODELLING. TECHNICAL REPORT March 2018
 REGULATING AND ACCELERATING DEVELOPMENT OF HIGHLY AUTOMATED AND AUTONOMOUS VEHICLES THROUGH SIMULATION AND MODELLING TECHNICAL REPORT March 2018 2 Contents Contents...2 1 Executive Summary...4 2 Introduction...5
REGULATING AND ACCELERATING DEVELOPMENT OF HIGHLY AUTOMATED AND AUTONOMOUS VEHICLES THROUGH SIMULATION AND MODELLING TECHNICAL REPORT March 2018 2 Contents Contents...2 1 Executive Summary...4 2 Introduction...5
Choosing the Optimum Mix of Sensors for Driver Assistance and Autonomous Vehicles
 Choosing the Optimum Mix of Sensors for Driver Assistance and Autonomous Vehicles Ali Osman Ors May 2, 2017 Copyright 2017 NXP Semiconductors 1 Sensing Technology Comparison Rating: H = High, M=Medium,
Choosing the Optimum Mix of Sensors for Driver Assistance and Autonomous Vehicles Ali Osman Ors May 2, 2017 Copyright 2017 NXP Semiconductors 1 Sensing Technology Comparison Rating: H = High, M=Medium,
Credible Autocoding for Verification of Autonomous Systems. Juan-Pablo Afman Graduate Researcher Georgia Institute of Technology
 Credible Autocoding for Verification of Autonomous Systems Juan-Pablo Afman Graduate Researcher Georgia Institute of Technology Agenda 2 Introduction Expert s Domain Next Generation Autocoding Formal methods
Credible Autocoding for Verification of Autonomous Systems Juan-Pablo Afman Graduate Researcher Georgia Institute of Technology Agenda 2 Introduction Expert s Domain Next Generation Autocoding Formal methods
2015 The MathWorks, Inc. 1
 2015 The MathWorks, Inc. 1 What s Behind 5G Wireless Communications? 서기환과장 2015 The MathWorks, Inc. 2 Agenda 5G goals and requirements Modeling and simulating key 5G technologies Release 15: Enhanced Mobile
2015 The MathWorks, Inc. 1 What s Behind 5G Wireless Communications? 서기환과장 2015 The MathWorks, Inc. 2 Agenda 5G goals and requirements Modeling and simulating key 5G technologies Release 15: Enhanced Mobile
Digital Engines for Smart and Connected Cars By Bob O Donnell, TECHnalysis Research Chief Analyst
 WHITE PAPER On Behalf of Digital Engines for Smart and Connected Cars By Bob O Donnell, TECHnalysis Research Chief Analyst SUMMARY Interest in advanced car electronics is extremely high, but there is a
WHITE PAPER On Behalf of Digital Engines for Smart and Connected Cars By Bob O Donnell, TECHnalysis Research Chief Analyst SUMMARY Interest in advanced car electronics is extremely high, but there is a
Tsuyoshi Sato PIONEER CORPORATION July 6, 2017
 Technology R&D for for Highly Highly Automated Automated Driving Driving Tsuyoshi Sato PIONEER CORPORATION July 6, 2017 Agenda Introduction Overview Architecture R&D for Highly Automated Driving Hardware
Technology R&D for for Highly Highly Automated Automated Driving Driving Tsuyoshi Sato PIONEER CORPORATION July 6, 2017 Agenda Introduction Overview Architecture R&D for Highly Automated Driving Hardware
The GATEway Project London s Autonomous Push
 The GATEway Project London s Autonomous Push 06/2016 Why TRL? Unrivalled industry position with a focus on mobility 80 years independent transport research Public and private sector with global reach 350+
The GATEway Project London s Autonomous Push 06/2016 Why TRL? Unrivalled industry position with a focus on mobility 80 years independent transport research Public and private sector with global reach 350+
DENSO www. densocorp-na.com
 DENSO www. densocorp-na.com Machine Learning for Automated Driving Description of Project DENSO is one of the biggest tier one suppliers in the automotive industry, and one of its main goals is to provide
DENSO www. densocorp-na.com Machine Learning for Automated Driving Description of Project DENSO is one of the biggest tier one suppliers in the automotive industry, and one of its main goals is to provide
Modeling and Simulation Made Easy with Simulink Carlos Osorio Principal Application Engineer MathWorks Natick, MA
 Modeling and Simulation Made Easy with Simulink Carlos Osorio Principal Application Engineer MathWorks Natick, MA 2013 The MathWorks, Inc. 1 Questions covered in this presentation 1. Why do we do modeling
Modeling and Simulation Made Easy with Simulink Carlos Osorio Principal Application Engineer MathWorks Natick, MA 2013 The MathWorks, Inc. 1 Questions covered in this presentation 1. Why do we do modeling
Intelligent Buildings Remote Monitoring Using PI System at the VSB - Technical University of Ostrava Jan Vanus
 Intelligent Buildings Remote Monitoring Using PI System at the VSB - Technical University of Ostrava Jan Vanus 1 Presentation Agenda: About VŠB TU Ostrava OSIsoft and Intelligent Building monitoring how
Intelligent Buildings Remote Monitoring Using PI System at the VSB - Technical University of Ostrava Jan Vanus 1 Presentation Agenda: About VŠB TU Ostrava OSIsoft and Intelligent Building monitoring how
Safe, Efficient and Effective Testing of Connected and Autonomous Vehicles Paul Jennings. Franco-British Symposium on ITS 5 th October 2016
 Safe, Efficient and Effective Testing of Connected and Autonomous Vehicles Paul Jennings Franco-British Symposium on ITS 5 th October 2016 An academic department within the science faculty Established
Safe, Efficient and Effective Testing of Connected and Autonomous Vehicles Paul Jennings Franco-British Symposium on ITS 5 th October 2016 An academic department within the science faculty Established
Development of a driver information and warning system with vehicle hardware-in-the-loop simulations
 Delft University of Technology Delft Center for Systems and Control Technical report 09-042 Development of a driver information and warning system with vehicle hardware-in-the-loop simulations O.J. Gietelink,
Delft University of Technology Delft Center for Systems and Control Technical report 09-042 Development of a driver information and warning system with vehicle hardware-in-the-loop simulations O.J. Gietelink,
Traffic Management for Smart Cities TNK115 SMART CITIES
 Traffic Management for Smart Cities TNK115 SMART CITIES DAVID GUNDLEGÅRD DIVISION OF COMMUNICATION AND TRANSPORT SYSTEMS Outline Introduction Traffic sensors Traffic models Frameworks Information VS Control
Traffic Management for Smart Cities TNK115 SMART CITIES DAVID GUNDLEGÅRD DIVISION OF COMMUNICATION AND TRANSPORT SYSTEMS Outline Introduction Traffic sensors Traffic models Frameworks Information VS Control
A SERVICE-ORIENTED SYSTEM ARCHITECTURE FOR THE HUMAN CENTERED DESIGN OF INTELLIGENT TRANSPORTATION SYSTEMS
 Tools and methodologies for ITS design and drivers awareness A SERVICE-ORIENTED SYSTEM ARCHITECTURE FOR THE HUMAN CENTERED DESIGN OF INTELLIGENT TRANSPORTATION SYSTEMS Jan Gačnik, Oliver Häger, Marco Hannibal
Tools and methodologies for ITS design and drivers awareness A SERVICE-ORIENTED SYSTEM ARCHITECTURE FOR THE HUMAN CENTERED DESIGN OF INTELLIGENT TRANSPORTATION SYSTEMS Jan Gačnik, Oliver Häger, Marco Hannibal
Presentation on DeepTest: Automated Testing of Deep-Neural-N. Deep-Neural-Network-driven Autonomous Car
 Presentation on DeepTest: Automated Testing of Deep-Neural-Network-driven Autonomous Car 1 Department of Computer Science, University of Virginia https://qdata.github.io/deep2read/ August 26, 2018 DeepTest:
Presentation on DeepTest: Automated Testing of Deep-Neural-Network-driven Autonomous Car 1 Department of Computer Science, University of Virginia https://qdata.github.io/deep2read/ August 26, 2018 DeepTest:
Positioning Challenges in Cooperative Vehicular Safety Systems
 Positioning Challenges in Cooperative Vehicular Safety Systems Dr. Luca Delgrossi Mercedes-Benz Research & Development North America, Inc. October 15, 2009 Positioning for Automotive Navigation Personal
Positioning Challenges in Cooperative Vehicular Safety Systems Dr. Luca Delgrossi Mercedes-Benz Research & Development North America, Inc. October 15, 2009 Positioning for Automotive Navigation Personal
Dr. Ayşegül Uçar. Department of Mechatronics Engineering University of Firat, Elazig, Turkey.
 Dr. Aysegul UCAR Dr. Ayşegül Uçar Department of Mechatronics Engineering University of Firat, Elazig, Turkey agulucar@firat.edu.tr https://abs.firat.edu.tr/agulucar 2 My Country-Turkey 3 My University
Dr. Aysegul UCAR Dr. Ayşegül Uçar Department of Mechatronics Engineering University of Firat, Elazig, Turkey agulucar@firat.edu.tr https://abs.firat.edu.tr/agulucar 2 My Country-Turkey 3 My University
FLASH LiDAR KEY BENEFITS
 In 2013, 1.2 million people died in vehicle accidents. That is one death every 25 seconds. Some of these lives could have been saved with vehicles that have a better understanding of the world around them
In 2013, 1.2 million people died in vehicle accidents. That is one death every 25 seconds. Some of these lives could have been saved with vehicles that have a better understanding of the world around them
Evolution of Software-Only-Simulation at NASA IV&V
 Evolution of Software-Only-Simulation at NASA IV&V http://www.nasa.gov/centers/ivv/jstar/itc.html Justin McCarty Justin.McCarty@TMCTechnologies.com Justin Morris Justin.R.Morris@Nasa.gov Scott Zemerick
Evolution of Software-Only-Simulation at NASA IV&V http://www.nasa.gov/centers/ivv/jstar/itc.html Justin McCarty Justin.McCarty@TMCTechnologies.com Justin Morris Justin.R.Morris@Nasa.gov Scott Zemerick
5G R&D at Huawei: An Insider Look
 5G R&D at Huawei: An Insider Look Accelerating the move from theory to engineering practice with MATLAB and Simulink Huawei is the largest networking and telecommunications equipment and services corporation
5G R&D at Huawei: An Insider Look Accelerating the move from theory to engineering practice with MATLAB and Simulink Huawei is the largest networking and telecommunications equipment and services corporation
ARGUING THE SAFETY OF MACHINE LEARNING FOR HIGHLY AUTOMATED DRIVING USING ASSURANCE CASES LYDIA GAUERHOF BOSCH CORPORATE RESEARCH
 ARGUING THE SAFETY OF MACHINE LEARNING FOR HIGHLY AUTOMATED DRIVING USING ASSURANCE CASES 14.12.2017 LYDIA GAUERHOF BOSCH CORPORATE RESEARCH Arguing Safety of Machine Learning for Highly Automated Driving
ARGUING THE SAFETY OF MACHINE LEARNING FOR HIGHLY AUTOMATED DRIVING USING ASSURANCE CASES 14.12.2017 LYDIA GAUERHOF BOSCH CORPORATE RESEARCH Arguing Safety of Machine Learning for Highly Automated Driving
HAVEit Highly Automated Vehicles for Intelligent Transport
 HAVEit Highly Automated Vehicles for Intelligent Transport Holger Zeng Project Manager CONTINENTAL AUTOMOTIVE HAVEit General Information Project full title: Highly Automated Vehicles for Intelligent Transport
HAVEit Highly Automated Vehicles for Intelligent Transport Holger Zeng Project Manager CONTINENTAL AUTOMOTIVE HAVEit General Information Project full title: Highly Automated Vehicles for Intelligent Transport
Durham Research Online
 Durham Research Online Deposited in DRO: 29 August 2017 Version of attached le: Accepted Version Peer-review status of attached le: Not peer-reviewed Citation for published item: Chiu, Wei-Yu and Sun,
Durham Research Online Deposited in DRO: 29 August 2017 Version of attached le: Accepted Version Peer-review status of attached le: Not peer-reviewed Citation for published item: Chiu, Wei-Yu and Sun,
How coarse was my texture? Richard Wix & Roland Leschinski, ARRB Group
 How coarse was my texture? Richard Wix & Roland Leschinski, ARRB Group Overview of presentation Section 1 Background What is texture? The quandary A solution Section 2 Results A tale of five lasers Outcomes
How coarse was my texture? Richard Wix & Roland Leschinski, ARRB Group Overview of presentation Section 1 Background What is texture? The quandary A solution Section 2 Results A tale of five lasers Outcomes
Automated Testing of Autonomous Driving Assistance Systems
 Automated Testing of Autonomous Driving Assistance Systems Lionel Briand Vector Testing Symposium, Stuttgart, 2018 SnT Centre Top level research in Information & Communication Technologies Created to fuel
Automated Testing of Autonomous Driving Assistance Systems Lionel Briand Vector Testing Symposium, Stuttgart, 2018 SnT Centre Top level research in Information & Communication Technologies Created to fuel
19th Meeting of the Directors of NMIs and Member State Representatives with BIPM
 19th Meeting of the Directors of NMIs and Member State Representatives with BIPM Session on Advanced Manufacturing, Digitization and Internet of Things Thursday, 19 th October 2017 11:10 to 13:00 Advanced
19th Meeting of the Directors of NMIs and Member State Representatives with BIPM Session on Advanced Manufacturing, Digitization and Internet of Things Thursday, 19 th October 2017 11:10 to 13:00 Advanced
IV Work Area: CONNECTED CARS: ROAD TO VEHICLE COMMUNICATION THROUGH VISIBLE LIGHT. An illustration of traffic control system of tomorrow
 IV Work Area: CONNECTED CARS: ROAD TO VEHICLE COMMUNICATION THROUGH VISIBLE LIGHT An illustration of traffic control system of tomorrow Motivation and Objectives IV, VV, VI optoelectronic WDM cooperative
IV Work Area: CONNECTED CARS: ROAD TO VEHICLE COMMUNICATION THROUGH VISIBLE LIGHT An illustration of traffic control system of tomorrow Motivation and Objectives IV, VV, VI optoelectronic WDM cooperative
Technical and Commercial Challenges of V2V and V2I networks
 Technical and Commercial Challenges of V2V and V2I networks Ravi Puvvala Founder & CEO, Savari Silicon Valley Automotive Open Source Meetup Sept 27 th 2012 Savari has developed an automotive grade connected
Technical and Commercial Challenges of V2V and V2I networks Ravi Puvvala Founder & CEO, Savari Silicon Valley Automotive Open Source Meetup Sept 27 th 2012 Savari has developed an automotive grade connected
The next level of intelligence: Artificial Intelligence. Innovation Day USA 2017 Princeton, March 27, 2017 Michael May, Siemens Corporate Technology
 The next level of intelligence: Artificial Intelligence Innovation Day USA 2017 Princeton, March 27, 2017, Siemens Corporate Technology siemens.com/innovationusa Notes and forward-looking statements This
The next level of intelligence: Artificial Intelligence Innovation Day USA 2017 Princeton, March 27, 2017, Siemens Corporate Technology siemens.com/innovationusa Notes and forward-looking statements This
Deep Learning Overview
 Deep Learning Overview Eliu Huerta Gravity Group gravity.ncsa.illinois.edu National Center for Supercomputing Applications Department of Astronomy University of Illinois at Urbana-Champaign Data Visualization
Deep Learning Overview Eliu Huerta Gravity Group gravity.ncsa.illinois.edu National Center for Supercomputing Applications Department of Astronomy University of Illinois at Urbana-Champaign Data Visualization
Digitalization in Machine Engineering. Siemens MCD and Cadenas smart catalog components
 Digitalization in Machine Engineering Siemens MCD and Cadenas smart catalog components Realize innovation. Siemens MCD and Cadenas smart catalog components Table of content Overview: Interdisciplinary
Digitalization in Machine Engineering Siemens MCD and Cadenas smart catalog components Realize innovation. Siemens MCD and Cadenas smart catalog components Table of content Overview: Interdisciplinary
Current Technologies in Vehicular Communications
 Current Technologies in Vehicular Communications George Dimitrakopoulos George Bravos Current Technologies in Vehicular Communications George Dimitrakopoulos Department of Informatics and Telematics Harokopio
Current Technologies in Vehicular Communications George Dimitrakopoulos George Bravos Current Technologies in Vehicular Communications George Dimitrakopoulos Department of Informatics and Telematics Harokopio
LEARNING FROM THE AVIATION INDUSTRY
 DEVELOPMENT Power Electronics 26 AUTHORS Dipl.-Ing. (FH) Martin Heininger is Owner of Heicon, a Consultant Company in Schwendi near Ulm (Germany). Dipl.-Ing. (FH) Horst Hammerer is Managing Director of
DEVELOPMENT Power Electronics 26 AUTHORS Dipl.-Ing. (FH) Martin Heininger is Owner of Heicon, a Consultant Company in Schwendi near Ulm (Germany). Dipl.-Ing. (FH) Horst Hammerer is Managing Director of
What s Behind 5G Wireless Communications?
 What s Behind 5G Wireless Communications? Marc Barberis 2015 The MathWorks, Inc. 1 Agenda 5G goals and requirements Modeling and simulating key 5G technologies Release 15: Enhanced Mobile Broadband IoT
What s Behind 5G Wireless Communications? Marc Barberis 2015 The MathWorks, Inc. 1 Agenda 5G goals and requirements Modeling and simulating key 5G technologies Release 15: Enhanced Mobile Broadband IoT
Devid Will, Adrian Zlocki
 Devid Will, Adrian Zlocki fka Forschungsgesellschaft Kraftfahrwesen mbh TS91 Sensors for Automated Vehicles State of the Art Analysis for Connected and Automated Driving within the SCOUT Project Overview
Devid Will, Adrian Zlocki fka Forschungsgesellschaft Kraftfahrwesen mbh TS91 Sensors for Automated Vehicles State of the Art Analysis for Connected and Automated Driving within the SCOUT Project Overview
BORDERLESS RESEARCH FOR SAFE MOBILITY
 BORDERLESS RESEARCH FOR SAFE MOBILITY WELCOME TO SAFER. WE RESEARCH TO SAVE LIVES, PREVENT INJURIES AND ENABLE SAFE MOBILITY. TOGETHER. Zero accidents and zero injuries in traffic that s our drive and
BORDERLESS RESEARCH FOR SAFE MOBILITY WELCOME TO SAFER. WE RESEARCH TO SAVE LIVES, PREVENT INJURIES AND ENABLE SAFE MOBILITY. TOGETHER. Zero accidents and zero injuries in traffic that s our drive and
DEEP LEARNING A NEW COMPUTING MODEL. Sundara R Nagalingam Head Deep Learning Practice
 DEEP LEARNING A NEW COMPUTING MODEL Sundara R Nagalingam Head Deep Learning Practice snagalingam@nvidia.com THE ERA OF AI AI CLOUD MOBILE PC 2 DEEP LEARNING Raw data Low-level features Mid-level features
DEEP LEARNING A NEW COMPUTING MODEL Sundara R Nagalingam Head Deep Learning Practice snagalingam@nvidia.com THE ERA OF AI AI CLOUD MOBILE PC 2 DEEP LEARNING Raw data Low-level features Mid-level features
Next-generation automotive image processing with ARM Mali-C71
 Next-generation automotive image processing with ARM Mali-C71 Chris Turner Director, Advanced Technology Marketing CPU Group, ARM ARM Tech Forum Korea June 28 th 2017 Pioneers in imaging and vision signal
Next-generation automotive image processing with ARM Mali-C71 Chris Turner Director, Advanced Technology Marketing CPU Group, ARM ARM Tech Forum Korea June 28 th 2017 Pioneers in imaging and vision signal
Transponder Based Ranging
 Transponder Based Ranging Transponderbasierte Abstandsmessung Gerrit Kalverkamp, Bernhard Schaffer Technische Universität München Outline Secondary radar principle Looking around corners: Diffraction of
Transponder Based Ranging Transponderbasierte Abstandsmessung Gerrit Kalverkamp, Bernhard Schaffer Technische Universität München Outline Secondary radar principle Looking around corners: Diffraction of
DENSO
 DENSO www.densocorp-na.com Collaborative Automated Driving Description of Project DENSO is one of the biggest tier one suppliers in the automotive industry, and one of its main goals is to provide solutions
DENSO www.densocorp-na.com Collaborative Automated Driving Description of Project DENSO is one of the biggest tier one suppliers in the automotive industry, and one of its main goals is to provide solutions
Smart Products and Digital Industry Prof. Dr.-Ing. Dietmar Goehlich
 Smart Products and Digital Industry Prof. Dr.-Ing. Dietmar Goehlich Technische Universität Berlin Faculty of Mechanical Engineering and Transport Systems Methods for Product Development and Mechatronics
Smart Products and Digital Industry Prof. Dr.-Ing. Dietmar Goehlich Technische Universität Berlin Faculty of Mechanical Engineering and Transport Systems Methods for Product Development and Mechatronics
DEVELOPING MANUFACTURING CAPABILITY: RE-SHAPING THE ENTERPRISE
 Nathan W. Hartman, Ed.D. Dauch Family Professor of Advanced Manufacturing Director, Product Lifcycle Management Center DEVELOPING MANUFACTURING CAPABILITY: RE-SHAPING THE ENTERPRISE What drives manufacturing
Nathan W. Hartman, Ed.D. Dauch Family Professor of Advanced Manufacturing Director, Product Lifcycle Management Center DEVELOPING MANUFACTURING CAPABILITY: RE-SHAPING THE ENTERPRISE What drives manufacturing
The Automotive Council Managing the Automotive Transformation
 The Automotive Council Managing the Automotive Transformation Dr. Graham Hoare Ford Motor Company Chair Automotive Council Technology Group AESIN Conference 20 th October 2016 www.automotivecouncil.co.uk
The Automotive Council Managing the Automotive Transformation Dr. Graham Hoare Ford Motor Company Chair Automotive Council Technology Group AESIN Conference 20 th October 2016 www.automotivecouncil.co.uk
AI for Autonomous Ships Challenges in Design and Validation
 VTT TECHNICAL RESEARCH CENTRE OF FINLAND LTD AI for Autonomous Ships Challenges in Design and Validation ISSAV 2018 Eetu Heikkilä Autonomous ships - activities in VTT Autonomous ship systems Unmanned engine
VTT TECHNICAL RESEARCH CENTRE OF FINLAND LTD AI for Autonomous Ships Challenges in Design and Validation ISSAV 2018 Eetu Heikkilä Autonomous ships - activities in VTT Autonomous ship systems Unmanned engine
Horizon 2020 ICT Robotics Work Programme (draft - Publication: 20 October 2015)
") NCP TRAINING BRUSSELS 07 OCTOBER 2015 1 Horizon 2020 ICT Robotics Work Programme 2016 2017 (draft - Publication: 20 October 2015) Cécile Huet Deputy Head of Unit Robotics Directorate General for Communication
NCP TRAINING BRUSSELS 07 OCTOBER 2015 1 Horizon 2020 ICT Robotics Work Programme 2016 2017 (draft - Publication: 20 October 2015) Cécile Huet Deputy Head of Unit Robotics Directorate General for Communication
Where smart, connected and autonomous vehicles come to life
 Where smart, connected and autonomous vehicles come to life Introducing The Living Lab Created by TRL, the UK Smart Mobility Living Lab @ Greenwich has been established to create an open innovation environment
Where smart, connected and autonomous vehicles come to life Introducing The Living Lab Created by TRL, the UK Smart Mobility Living Lab @ Greenwich has been established to create an open innovation environment
Virtual Worlds for the Perception and Control of Self-Driving Vehicles
 Virtual Worlds for the Perception and Control of Self-Driving Vehicles Dr. Antonio M. López antonio@cvc.uab.es Index Context SYNTHIA: CVPR 16 SYNTHIA: Reloaded SYNTHIA: Evolutions CARLA Conclusions Index
Virtual Worlds for the Perception and Control of Self-Driving Vehicles Dr. Antonio M. López antonio@cvc.uab.es Index Context SYNTHIA: CVPR 16 SYNTHIA: Reloaded SYNTHIA: Evolutions CARLA Conclusions Index
The Real-Time Control System for Servomechanisms
 The Real-Time Control System for Servomechanisms PETR STODOLA, JAN MAZAL, IVANA MOKRÁ, MILAN PODHOREC Department of Military Management and Tactics University of Defence Kounicova str. 65, Brno CZECH REPUBLIC
The Real-Time Control System for Servomechanisms PETR STODOLA, JAN MAZAL, IVANA MOKRÁ, MILAN PODHOREC Department of Military Management and Tactics University of Defence Kounicova str. 65, Brno CZECH REPUBLIC
Document Version Publisher s PDF, also known as Version of Record (includes final page, issue and volume numbers)
") Development of a driver information and warning system with vehicle-hardware-in-the-loop simulations Gietelink, O.J.; Ploeg, J.; Schutter, de, B.; Verhaegen, M.H. Published in: Mechatronics DOI: 10.1016/j.mechatronics.2009.04.012
Development of a driver information and warning system with vehicle-hardware-in-the-loop simulations Gietelink, O.J.; Ploeg, J.; Schutter, de, B.; Verhaegen, M.H. Published in: Mechatronics DOI: 10.1016/j.mechatronics.2009.04.012
PEGASUS Effectively ensuring automated driving. Prof. Dr.-Ing. Karsten Lemmer April 6, 2017
 PEGASUS Effectively ensuring automated driving. Prof. Dr.-Ing. Karsten Lemmer April 6, 2017 Starting Position for Automated Driving Top issue! Technology works Confidence Testing differently automated
PEGASUS Effectively ensuring automated driving. Prof. Dr.-Ing. Karsten Lemmer April 6, 2017 Starting Position for Automated Driving Top issue! Technology works Confidence Testing differently automated