The Building Blocks of Autonomous Control. Phil Magney, Founder & Principal Advisor July 2016
|
|
|
- Gertrude Davis
- 5 years ago
- Views:
Transcription
1 The Building Blocks of Autonomous Control Phil Magney, Founder & Principal Advisor July 2016

2 Agenda VSI Remarks The Building Blocks of Autonomy Elements of Autonomous Control Motion Control (path, maneuver, trajectory) Sensor Fusion Processing for Autonomous Control ECU Consolidation Software Defined Car Functional Safety Requirements Copyright Vision Systems Intelligence, LLC. 2
3 Changing Balance of Power AV solutions are very complex Nobody owns the whole value chain various domains of expertise Big Tech cannot go it alone they need OEM and tier-one expertise Traditional auto cannot go it alone they need robotics, AI, machine learning, deep learning and massive IT support! Active safety is largely rules based -- deterministic approach Full autonomy may not be rule based there are too many corner cases Traditional suppliers can stay relevant with focus on the mechatronics where the digital world meets the mechanical world! The balance of power is definitely changing, particularly in the context of new mobility Copyright Vision Systems Intelligence, LLC. 3

4 The Challenges of Autonomy Level 2 autonomy well under way, but L3 challenging L4/L5 imminent over time heavy tech push Take lots of software expertise: Perception, Motion Control, Predictive Learning, Safety, Security, etc. Lots of M&A activity Machine learning will be vital for L4/L5: For training the classifiers to handle nearly infinite scenes and images For training predictive control (maneuvers and trajectories) as there are infinite possible situations in which an AV will need to react. The sensing problem is largely understood motion planning, decision and arbitration is the big challenge now! The processor companies are in a race to deliver the best instruction sets that can consolidate perception and control The AV Cloud = Data Aggregation + Deep Learning + OTA + Supervision + Security + Enterprise Management Copyright Vision Systems Intelligence, LLC. 4
5 VSI Perspective Copyright Vision Systems Intelligence, LLC. 5
6 6


7 What is Driving Auto Tech? Copyright Vision Systems Intelligence, LLC. 7
8 From ADAS to Autonomous Control Copyright Vision Systems Intelligence, LLC. 8

 SAE Levels 4 and above Full or highly automated Pursued by tech industry Requires machine")
9 Two Approaches to Autonomy Not a Zero Sum Game! Automated Driving Incremental Approach Evolution of ADAS SAE Levels 1,2,3 Conditional Autonomy Step by Step approach Convenience and safety Existing automotive strategy Highly/Fully Automated Driving Driverless Car Approach Mobility as a Service (MaaS) SAE Levels 4 and above Full or highly automated Pursued by tech industry Requires machine learning Requires AV Cloud Copyright Vision Systems Intelligence, LLC. 9
10 SAE Level of Autonomy The Evolution of Autonomy Driverless Cars Level 5 Fully Autonomous Vehicle Driverless door-to-door Automated Driving Level 3 Level 4 Highly Autonomous Vehicle Driverless in certain areas Conditional Autonomy (i.e. Piloted driving) but driver required Level 2 Partial Autonomy GM Supercruise, Audi Traffic Jam Assist, Tesla Autopilot Level 1 Active (control-based) ADAS Solutions Active lane keeping, adaptive cruise control, automatic emergency braking, etc Copyright Vision Systems Intelligence, LLC. 10
11 Elements of Autonomous Control Systems Copyright Vision Systems Intelligence, LLC. 11
12 Technologies for Autonomous Control Technologies Sensors Safety Domain Controllers Vision Processing Machine Learning Sensor Fusion Control Systems Reference Maps Communications High Capacity Networks Reasoning Camera, Radar, LiDAR, IR, inertia, Ultrasonic, etc. These controllers can acquire, sense, interpret, classify and make decisions to actuate control Vision processing is very compute intensive. Requires massively parallel computing architectures Training the algorithms -- classifiers, pooling, semantic labeling, etc. Machine learning also includes CNN, DNN, SVM Requires a unique set of software tools for development of algorithms -- data association, clustering, segmentation, filtering, estimation, and motion prediction Predictive control for optimal vehicle trajectory using information from environmental sensing systems Road features, road geometry, and very dynamic enables autonomous method called sense and align -- Also enables advanced safety V2V, V2I, V2P, V2C (Vehicle, Infrastructure, Pedestrian, and Cloud) Necessary to handle the flow of information being generated in the vehicle. Transition from CAN to higher performance networks such as Ethernet Copyright Vision Systems Intelligence, LLC. 12
13 Sensors Sensor Mono Camera Stereo Camera Tri-Focal Camera Radar Flash Lidar Solid State Lidar Attributes Single focal point good for identification of objects, improving for 3D attributes Dual stereoscopic focal points very good for depth and motion within sweet spot of converged focal points Three different focal points like 3 monocams increases range and field of view (FOW) 24-79GHz many applications, very accurate ranging new millimeter wave using CMOS can sense pedestrians Very low resolutions ToF (time-of-flight), restricted for identification good for sensor fusion applications Good resolutions via point cloud better at identification good for L3/L4/L5 perception 360 Degree Lidar Good resolution via point cloud best for data acquisition required for L4/L5 Infrared (IR) HD Maps IMU Thermal camera useful for night vision and driver monitoring sometime IR emitters used for ToF Useful for localization necessary for L4/L5 very useful when combined with dynamic content on road situation Inertia Measurement necessary for localization and path planning need high resolution dead reckoning Copyright Vision Systems Intelligence, LLC. 13












14 Sensors RAW Sensors, Sensor Modules, Sensor Fusion Copyright Vision Systems Intelligence, LLC. 14
15 Perception Plus Control Sense, Decision, Action Image Sensors Camera(s) Thermal Scanning LiDAR Wheel speed sensor Inertia measurement Longitudinal Control Ranging Sensors Radar Flash LiDAR Ultrasonic Sensor Fusion Algorithms Object Track-to-track fusion RAW data fusion Control Algorithms Trajectory control PID Control State Machines MPC Control Map Data Path planning Localization Dynamic content Throttle position Steering Angle Latitudinal Control Copyright Vision Systems Intelligence, LLC. 15















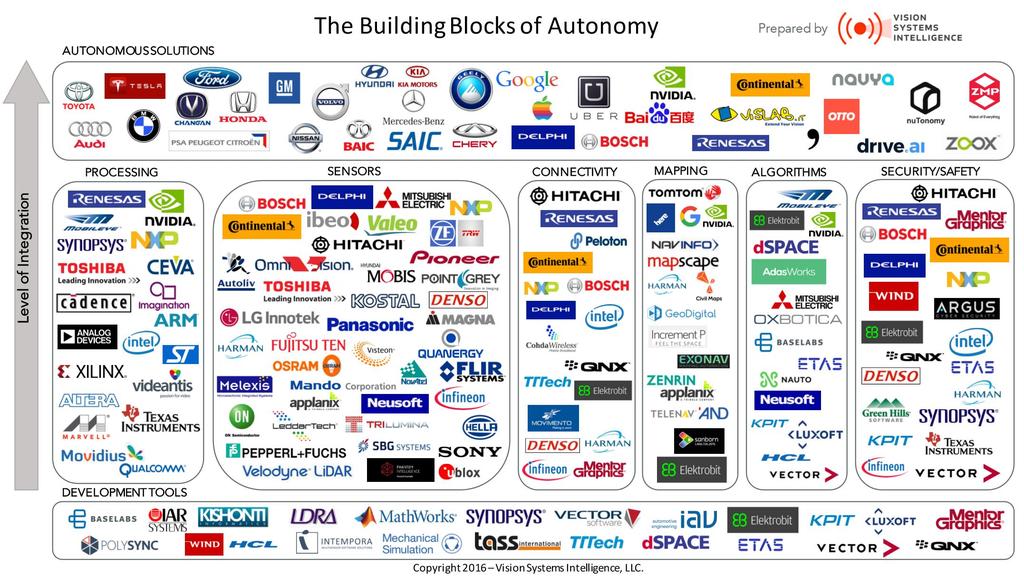
16 Who is Assembling Autonomous Solutions (perception + control) Copyright Vision Systems Intelligence, LLC. 16
17 Motion Planning Copyright Vision Systems Intelligence, LLC. 17

18 Motion Planning Model Predictive Control Path Planning Dependent on the digital reference maps as well as the incremental data that supplement this. Incremental data includes dynamic content such as lane closures, detours, or traffic conditions. Maneuverer Planning these are the decision algorithms that have to assess risk and evaluate dynamic elements. These algorithms are based on decision theory and best trained through massive data collection and rigorous training. Trajectory planning this has a higher level role compared to a path or maneuvers. It contains the geometric concept of a path but it also encompasses vehicle states plus the kinematic properties. Copyright Vision Systems Intelligence, LLC. 18
19 Elements of the Autonomous Vehicle Cloud World Map AV Server Dynamic Map AV Cloud Security Layer Kinematic Map Communications AI Platform Capture & Record Leading Issue Petabytes of geospatial data generated from 3D scans are essential for the creation of 3D semantic maps. Data collection will become commoditized. Extracting features from the data remains bottlenecked. The culprit: a process dominated by manual labeling and vectorization of the input data. Copyright Vision Systems Intelligence, LLC. 19

20 Autonomous Control: The Use Case for Maps Maps enable redundancy of sensors. Maps better optimize perception systems takes some load off of the environmental sensors. Maps aid in the localization and path planning for autonomous control provides a guidance method. Autonomy requires dynamic content such as ice, potholes and construction-related course adjustments and/or obstacles. Autonomous Vehicle needs map to separate unlabeled objects from the static picture of the world with which to compare what it sees. Copyright Vision Systems Intelligence, LLC. 20

21 Maps for Autonomous Driving Requires Connectivity, Cloud, & Crowd-Sourced Content High Precision Maps Pre-recorded 360/3D Map High Definition Maps from 3 rd Party Minimal Maps Sparse Recording No Map Store & Align Hi-Precision Maps Sense & Understand No Maps Copyright Vision Systems Intelligence, LLC. 21













22 Mapping Assets That Will Enable Autonomy Copyright Vision Systems Intelligence, LLC. 22
23 Machine Learning: Teaching Cars To Drive Copyright Vision Systems Intelligence, LLC. 23



24 Machine Learning vs. Deep Learning Deterministic This approach to self-driving cars comes with a measure of verifiability that gives confidence that the design works and why it doesn't. The problem with this "engineering" approach is that the system can't cope with anything that it encounters that is new. Probabilistic This approach can generalize to situations it has never been trained on. This means that a self-driving car using an end-to-end approach could be more capable, but also perhaps less predictable.. Copyright Vision Systems Intelligence, LLC. 24
 and control (maneuvers and")
 using the very same matrix x as the inputs.")
25 Neural Networks Deep Neural Networks (DNN) is the latest hot topic for autonomous vehicle development. The goal is to train algorithms to handle limitless possibilities and outcomes this is also known as machine learning Is applied to both perception (sense and understand) and control (maneuvers and trajectories) Algorithms need to be trained with real or simulated data Supervised learning: Learn by examples as you try to predict output a target vector y, from a matrix of inputs, x. Training is done with known inputs and associated known outputs. Unsupervised learning: Attempt to predict the target vector y (unknown) using the very same matrix x as the inputs. The network learns something intrinsic about the data without the help of a target or label vector that is often created by humans. Uses weights. Semi-supervised learning: Training data includes a few desired outputs. Reinforcement learning: Rewards from a sequence of actions. NVIDIA approach purports end-to-end training for self driving car project, called Dave- 2. The neural network learns to steer by being shown videos of a human driving and what the human driver did to the steering wheel as a result. Mobileye approach favors semantic abstraction which breaks up the learning into blocks. Mobileye says there are too many corner cases with NVIDIA approach. Conventional approach current self-driving car approach breaks the task into different components sense & identify; localize against surroundings; then you plan your motions. Copyright Vision Systems Intelligence, LLC. 25
26 Sensor Fusion For Active Safety & Autonomous Control Copyright Vision Systems Intelligence, LLC. 26

27 Developing Sensor Fusion Step-by-Step 1. Modeling tools are necessary to examine functional requirements as well as to determine hardware and software requirements. 2. Sensor selection considers all environment sensors such as camera, radar, LiDAR, ultrasonic, as well as other sensors such as inertia, positioning, throttle position, steering angle etc. 3. Safety goals and hazard ratings must be established formally according to ISO most active safety and autonomous control will be ASIL D resulting very stringent requirements. 4. Fusion of sensor data can be done with objects (complete sensors modules such as Mobileye) or can be done with RAW data or a combination. 5. Special tools are necessary for sensor signal synchronization and timing such as ADTF, ROS, RT Maps, Polysync, etc. They record, playback and analyze the fused sensor data. Copyright Vision Systems Intelligence, LLC. 27

28 Developing Sensor Fusion continued 6. Development will require a hardware development platform to test the feasibility of your applications typically FPGA-based. This may be in advance of a chosen target processor. 7. Lots of simulation software will be required for Model-in-loop (MiL)for initial examination, Hardware-in-loop (HiL) for sensors and ECUs, Software-in-Loop (SiL) for application testing. 8. Environmental models (simulated roads, objects, signs etc.) will be necessary unless you have collected you own data sets. 9. Selection of a target processor for perception (typically SoC) that can handle the requirements of your applications (i.e. vision processor). You will need to select a target processor for control (typically duel-core lockstep) 10.You will need ISO compliant production code generation tools in accordance with MISRA requirements (Motor Industry Software Reliability Association). Copyright Vision Systems Intelligence, LLC. 28
29 Processing Requirements Copyright Vision Systems Intelligence, LLC. 29
30 CPU Load for Object Recognition Chart Source: Renesas Copyright Vision Systems Intelligence, LLC. 30

31 Processing for Autonomous Functions ASICs have the advantage of high performance and low power consumption. They are not suitable for rapid prototyping and they are not reconfigurable. FPGA often used for prototyping to implement the architecture of a microprocessor soft processor core and the required additional custom hardware accelerators. they are not so good for the serial processing necessary in mid and high levels. GPU Current GPUs are power hungry and are not ideal for embedded applications. However, GPUs are very good with vector processing and as well as deep learning routines. DSPs Attractive for embedded automotive applications since they offer a good price to performance ratio. DSPs are essentially for signal processing which is a core element of sensor based solutions. DSP logic in now commonly found in SoCs. MPUs a good option for high-level vision processing. Additionally, they are easy to program, since it is possible to use the same tools and libraries used for standard PC applications. ARM architectures are leading MPU instruction sets. SoCs Many new products are entering the market which include the elements of the above approaches combining standard microprocessors with added functional such as FPGA fabric, DSP functionality and unique memory cores for pipelined processing. Copyright Vision Systems Intelligence, LLC. 31








32 Processor Activities Related to Active Safety & Autonomy Copyright Vision Systems Intelligence, LLC. 32

33 Key Enablement Platforms NVIDIA DriveWorks -- NVIDIA DriveWorks software development kit (SDK) gives developers a foundation upon which to build applications for object detection, map localization, and path planning. NXP s BlueBox -- is a central computing engine that enables all aspects of perception, decision and motion planning tasks. The NXP BlueBox platform is a Linux-based open-platform that is programmable in C allowing automotive manufacturers to customize their solutions. Mobileye now engaged in AV development activities on two OEM programs with a pending third OEM. Most AV activities centered around EyeQ5 SoC. Elektrobit robinos is an interface specification for autonomous development. Includes many EB blocksets and tools. Polysync comes from start up (Harbrick) that has created an abstraction layer with APIs so that developers can add their applications for AV control. (pure tech vision as software define car ) Renesas Skyline Concept aggregates all nodes into a vehicle, along with various partners, for test and development of AV solutions. Texas Instruments RT-RK Platform a development kit for ADAS and autonomous solutions. Copyright Vision Systems Intelligence, LLC. 33
34 ECU Consolidation Copyright Vision Systems Intelligence, LLC. 34

35 ECU Bus Systems -- Distributed Systems Vehicles are based on a distributed architecture where data is shared among different ECUs using high-speed deterministic networks! Image Source: Renesas Copyright Vision Systems Intelligence, LLC. 35

36 Sensing Network Requirements The amount of bandwidth necessary to handle raw data from all sensors is a big challenge for designers of active safety of autonomous control systems! Copyright Vision Systems Intelligence, LLC. 36



37 Consolidation of Sensing ECUs Singular Approach Consolidated Approach Copyright Vision Systems Intelligence, LLC. 37

38 Functional Elements of Autonomous Control Perception Decision Control Fail Safe Elektrobit robinos Architecture Copyright Vision Systems Intelligence, LLC. 38


39 Software Defined Car Conventional Architecture Software Centric Approach Copyright Vision Systems Intelligence, LLC. 39

40 Audi zfas Autonomous Domain Controller Processors nvidea Tegra K1 SoC Mobile EyeQ3 SoC TTTech NIC Infineon TC29xT (tri-core) Altera FPGA Delphi Sensors Ultrasonic Front Radar 250m Front Laser Scanner 80m Rear Radar Surround Cameras Wide angle front camera GPS up to 2cm LTE wireless Cloud-based Deep Learning The zfas controller represent the brains of autonomous control. Massive processing support is necessary to handle all sensor inputs, decipher objects and react in real-time! Copyright Vision Systems Intelligence, LLC. 40


41 Nvidia DrivePX The NVIDIA DRIVE PX platform enables the development of systems that capture and process multiple HD camera and sensor inputs and supports advanced graphics, computer vision and machine learning. Copyright Vision Systems Intelligence, LLC. 41
42 Functional Safety Copyright Vision Systems Intelligence, LLC. 42

43 Functional Safety ISO Functional Safety means absence of unreasonable risk due to hazards caused by malfunctioning behavior of E/E systems ISO is still firmly grounded in the constraints of a traditional vehicle where the presence of a driver provides a failsafe mechanism. As such, under the current scope of ISO 26262, there are no current provisions for a driverless vehicle. It is applicable to safety-related automotive systems that include one or more E/E systems and that are installed in series production passenger cars with a max gross weight up to 3.5t ISO addresses architectural & functional aspects and procedural aspects to avoid systematic faults and to control random faults Automotive Safety Integrity Level (ASIL) are assigned values to systems from A (lowest) to D (highest) Key components that are part of a system can be certified as a Safety Element out of Context (SEooC) ASIL decomposition provides method for reducing ASIL levels (ASIL A+C = ASIL D) Copyright Vision Systems Intelligence, LLC. 43

44 ASIL Rating Examples Copyright Vision Systems Intelligence, LLC. 44
45 Key Take Aways Active ADAS systems are the building blocks of autonomous control and lend to the traditional OEMs in terms of strategy Companies (OEMs, tier-1s) wanting to go deeper into the value chain to have more control over the functionality especially for autonomous control features Big Tech Brings disruptive technology to traditional automotive school of thought probabilistic vs. deterministic architecture. New methods in machine learning offer great promise for autonomous control Data acquisition including highly detailed mapping and crowd sourced dynamic content becomes vital to autonomy and to learning. HMI will see a lot of innovation from autonomous control features lots of new research on this but current concepts appear fragmented Functional Safety practices do not currently align with driverless technologies. Should safety practices adopt outcome-based examination? Copyright Vision Systems Intelligence, LLC. 45
46 Copyright 2016 Vision Systems Intelligence, LLC. Contact Phil Magney Founder and Principal Advisor Copyright Vision Systems Intelligence, LLC. 46
VSI Labs The Build Up of Automated Driving
 VSI Labs The Build Up of Automated Driving October - 2017 Agenda Opening Remarks Introduction and Background Customers Solutions VSI Labs Some Industry Content Opening Remarks Automated vehicle systems
VSI Labs The Build Up of Automated Driving October - 2017 Agenda Opening Remarks Introduction and Background Customers Solutions VSI Labs Some Industry Content Opening Remarks Automated vehicle systems
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS. Sergii Bykov Technical Lead Machine Learning 12 Oct 2017
 23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
A Winning Combination
 A Winning Combination Risk factors Statements in this presentation that refer to future plans and expectations are forward-looking statements that involve a number of risks and uncertainties. Words such
A Winning Combination Risk factors Statements in this presentation that refer to future plans and expectations are forward-looking statements that involve a number of risks and uncertainties. Words such
Combining ROS and AI for fail-operational automated driving
 Combining ROS and AI for fail-operational automated driving Prof. Dr. Daniel Watzenig Virtual Vehicle Research Center, Graz, Austria and Institute of Automation and Control at Graz University of Technology
Combining ROS and AI for fail-operational automated driving Prof. Dr. Daniel Watzenig Virtual Vehicle Research Center, Graz, Austria and Institute of Automation and Control at Graz University of Technology
David Howarth. Business Development Manager Americas
 David Howarth Business Development Manager Americas David Howarth IPG Automotive USA, Inc. Business Development Manager Americas david.howarth@ipg-automotive.com ni.com Testing Automated Driving Functions
David Howarth Business Development Manager Americas David Howarth IPG Automotive USA, Inc. Business Development Manager Americas david.howarth@ipg-automotive.com ni.com Testing Automated Driving Functions
ADAS Development using Advanced Real-Time All-in-the-Loop Simulators. Roberto De Vecchi VI-grade Enrico Busto - AddFor
 ADAS Development using Advanced Real-Time All-in-the-Loop Simulators Roberto De Vecchi VI-grade Enrico Busto - AddFor The Scenario The introduction of ADAS and AV has created completely new challenges
ADAS Development using Advanced Real-Time All-in-the-Loop Simulators Roberto De Vecchi VI-grade Enrico Busto - AddFor The Scenario The introduction of ADAS and AV has created completely new challenges
Computer vision, wearable computing and the future of transportation
 Computer vision, wearable computing and the future of transportation Amnon Shashua Hebrew University, Mobileye, OrCam 1 Computer Vision that will Change Transportation Amnon Shashua Mobileye 2 Computer
Computer vision, wearable computing and the future of transportation Amnon Shashua Hebrew University, Mobileye, OrCam 1 Computer Vision that will Change Transportation Amnon Shashua Mobileye 2 Computer
Choosing the Optimum Mix of Sensors for Driver Assistance and Autonomous Vehicles
 Choosing the Optimum Mix of Sensors for Driver Assistance and Autonomous Vehicles Ali Osman Ors May 2, 2017 Copyright 2017 NXP Semiconductors 1 Sensing Technology Comparison Rating: H = High, M=Medium,
Choosing the Optimum Mix of Sensors for Driver Assistance and Autonomous Vehicles Ali Osman Ors May 2, 2017 Copyright 2017 NXP Semiconductors 1 Sensing Technology Comparison Rating: H = High, M=Medium,
Physics Based Sensor simulation
 Physics Based Sensor simulation Jordan Gorrochotegui - Product Manager Software and Services Mike Phillips Software Engineer Restricted Siemens AG 2017 Realize innovation. Siemens offers solutions across
Physics Based Sensor simulation Jordan Gorrochotegui - Product Manager Software and Services Mike Phillips Software Engineer Restricted Siemens AG 2017 Realize innovation. Siemens offers solutions across
Perception platform and fusion modules results. Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event
 Perception platform and fusion modules results Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event 20 th -21 st November 2013 Agenda Introduction Environment Perception in Intelligent Transport
Perception platform and fusion modules results Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event 20 th -21 st November 2013 Agenda Introduction Environment Perception in Intelligent Transport
A.I in Automotive? Why and When.
 A.I in Automotive? Why and When. AGENDA 01 02 03 04 Definitions A.I? A.I in automotive Now? Next big A.I breakthrough in Automotive 01 DEFINITIONS DEFINITIONS Artificial Intelligence Artificial Intelligence:
A.I in Automotive? Why and When. AGENDA 01 02 03 04 Definitions A.I? A.I in automotive Now? Next big A.I breakthrough in Automotive 01 DEFINITIONS DEFINITIONS Artificial Intelligence Artificial Intelligence:
Virtual Testing of Autonomous Vehicles
 Virtual Testing of Autonomous Vehicles Mike Dempsey Claytex Services Limited Software, Consultancy, Training Based in Leamington Spa, UK Office in Cape Town, South Africa Experts in Systems Engineering,
Virtual Testing of Autonomous Vehicles Mike Dempsey Claytex Services Limited Software, Consultancy, Training Based in Leamington Spa, UK Office in Cape Town, South Africa Experts in Systems Engineering,
FAIL OPERATIONAL E/E SYSTEM CONCEPT FOR FUTURE APPLICATION IN ADAS AND AUTONOMOUS DRIVING
 FAIL OPERATIONAL E/E SYSTEM CONCEPT FOR FUTURE APPLICATION IN ADAS AND AUTONOMOUS DRIVING Fail Safe Fail Operational Fault Tolerance ISO 26262 Hermann Kränzle, TÜV NORD Systems OUR FUNCTIONAL SAFETY CERTIFIED
FAIL OPERATIONAL E/E SYSTEM CONCEPT FOR FUTURE APPLICATION IN ADAS AND AUTONOMOUS DRIVING Fail Safe Fail Operational Fault Tolerance ISO 26262 Hermann Kränzle, TÜV NORD Systems OUR FUNCTIONAL SAFETY CERTIFIED
SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results
 SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results Angelos Amditis (ICCS) and Lali Ghosh (DEL) 18 th October 2013 20 th ITS World
SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results Angelos Amditis (ICCS) and Lali Ghosh (DEL) 18 th October 2013 20 th ITS World
Autonomous Vehicle Simulation (MDAS.ai)
") Autonomous Vehicle Simulation (MDAS.ai) Sridhar Lakshmanan Department of Electrical & Computer Engineering University of Michigan - Dearborn Presentation for Physical Systems Replication Panel NDIA Cyber-Enabled
Autonomous Vehicle Simulation (MDAS.ai) Sridhar Lakshmanan Department of Electrical & Computer Engineering University of Michigan - Dearborn Presentation for Physical Systems Replication Panel NDIA Cyber-Enabled
A Roadmap for Connected & Autonomous Vehicles. David Skipp Ford Motor Company
 A Roadmap for Connected & Autonomous Vehicles David Skipp Ford Motor Company ! Why does an Autonomous Vehicle need a roadmap? Where might the roadmap take us? What should we focus on next? Why does an
A Roadmap for Connected & Autonomous Vehicles David Skipp Ford Motor Company ! Why does an Autonomous Vehicle need a roadmap? Where might the roadmap take us? What should we focus on next? Why does an
Embedding Artificial Intelligence into Our Lives
 Embedding Artificial Intelligence into Our Lives Michael Thompson, Synopsys D&R IP-SOC DAYS Santa Clara April 2018 1 Agenda Introduction What AI is and is Not Where AI is being used Rapid Advance of AI
Embedding Artificial Intelligence into Our Lives Michael Thompson, Synopsys D&R IP-SOC DAYS Santa Clara April 2018 1 Agenda Introduction What AI is and is Not Where AI is being used Rapid Advance of AI
TECHNOLOGY DEVELOPMENT AREAS IN AAWA
 TECHNOLOGY DEVELOPMENT AREAS IN AAWA Technologies for realizing remote and autonomous ships exist. The task is to find the optimum way to combine them reliably and cost effecticely. Ship state definition
TECHNOLOGY DEVELOPMENT AREAS IN AAWA Technologies for realizing remote and autonomous ships exist. The task is to find the optimum way to combine them reliably and cost effecticely. Ship state definition
Tsuyoshi Sato PIONEER CORPORATION July 6, 2017
 Technology R&D for for Highly Highly Automated Automated Driving Driving Tsuyoshi Sato PIONEER CORPORATION July 6, 2017 Agenda Introduction Overview Architecture R&D for Highly Automated Driving Hardware
Technology R&D for for Highly Highly Automated Automated Driving Driving Tsuyoshi Sato PIONEER CORPORATION July 6, 2017 Agenda Introduction Overview Architecture R&D for Highly Automated Driving Hardware
Digital Engines for Smart and Connected Cars By Bob O Donnell, TECHnalysis Research Chief Analyst
 WHITE PAPER On Behalf of Digital Engines for Smart and Connected Cars By Bob O Donnell, TECHnalysis Research Chief Analyst SUMMARY Interest in advanced car electronics is extremely high, but there is a
WHITE PAPER On Behalf of Digital Engines for Smart and Connected Cars By Bob O Donnell, TECHnalysis Research Chief Analyst SUMMARY Interest in advanced car electronics is extremely high, but there is a
Intelligent Technology for More Advanced Autonomous Driving
 FEATURED ARTICLES Autonomous Driving Technology for Connected Cars Intelligent Technology for More Advanced Autonomous Driving Autonomous driving is recognized as an important technology for dealing with
FEATURED ARTICLES Autonomous Driving Technology for Connected Cars Intelligent Technology for More Advanced Autonomous Driving Autonomous driving is recognized as an important technology for dealing with
Next-generation automotive image processing with ARM Mali-C71
 Next-generation automotive image processing with ARM Mali-C71 Chris Turner Director, Advanced Technology Marketing CPU Group, ARM ARM Tech Forum Korea June 28 th 2017 Pioneers in imaging and vision signal
Next-generation automotive image processing with ARM Mali-C71 Chris Turner Director, Advanced Technology Marketing CPU Group, ARM ARM Tech Forum Korea June 28 th 2017 Pioneers in imaging and vision signal
NCCT IEEE PROJECTS ADVANCED ROBOTICS SOLUTIONS. Latest Projects, in various Domains. Promise for the Best Projects
 NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
NCCT Promise for the Best Projects IEEE PROJECTS in various Domains Latest Projects, 2009-2010 ADVANCED ROBOTICS SOLUTIONS EMBEDDED SYSTEM PROJECTS Microcontrollers VLSI DSP Matlab Robotics ADVANCED ROBOTICS
Dr George Gillespie. CEO HORIBA MIRA Ltd. Sponsors
 Dr George Gillespie CEO HORIBA MIRA Ltd Sponsors Intelligent Connected Vehicle Roadmap George Gillespie September 2017 www.automotivecouncil.co.uk ICV Roadmap built on Travellers Needs study plus extensive
Dr George Gillespie CEO HORIBA MIRA Ltd Sponsors Intelligent Connected Vehicle Roadmap George Gillespie September 2017 www.automotivecouncil.co.uk ICV Roadmap built on Travellers Needs study plus extensive
GNSS in Autonomous Vehicles MM Vision
 GNSS in Autonomous Vehicles MM Vision MM Technology Innovation Automated Driving Technologies (ADT) Evaldo Bruci Context & motivation Within the robotic paradigm Magneti Marelli chose Think & Decision
GNSS in Autonomous Vehicles MM Vision MM Technology Innovation Automated Driving Technologies (ADT) Evaldo Bruci Context & motivation Within the robotic paradigm Magneti Marelli chose Think & Decision
ADAS COMPUTER VISION AND AUGMENTED REALITY SOLUTION
 ENGINEERING ENERGY TELECOM TRAVEL AND AVIATION SOFTWARE FINANCIAL SERVICES ADAS COMPUTER VISION AND AUGMENTED REALITY SOLUTION Sergii Bykov, Technical Lead TECHNOLOGY AUTOMOTIVE Product Vision Road To
ENGINEERING ENERGY TELECOM TRAVEL AND AVIATION SOFTWARE FINANCIAL SERVICES ADAS COMPUTER VISION AND AUGMENTED REALITY SOLUTION Sergii Bykov, Technical Lead TECHNOLOGY AUTOMOTIVE Product Vision Road To
CAPACITIES FOR TECHNOLOGY TRANSFER
 CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
Autonomous Automation: How do we get to a Million Miles of testing?
 Autonomous Automation: How do we get to a Million Miles of testing? Jace Allen Business Development Manager Simulation, Test, and EEDM dspace Inc. 50131 Pontiac Trail Wixom, MI 48393 USA 1 Agenda 1. Intro
Autonomous Automation: How do we get to a Million Miles of testing? Jace Allen Business Development Manager Simulation, Test, and EEDM dspace Inc. 50131 Pontiac Trail Wixom, MI 48393 USA 1 Agenda 1. Intro
Vision with Precision Webinar Series Augmented & Virtual Reality Aaron Behman, Xilinx Mark Beccue, Tractica. Copyright 2016 Xilinx
 Vision with Precision Webinar Series Augmented & Virtual Reality Aaron Behman, Xilinx Mark Beccue, Tractica Xilinx Vision with Precision Webinar Series Perceiving Environment / Taking Action: AR / VR Monitoring
Vision with Precision Webinar Series Augmented & Virtual Reality Aaron Behman, Xilinx Mark Beccue, Tractica Xilinx Vision with Precision Webinar Series Perceiving Environment / Taking Action: AR / VR Monitoring
interactive IP: Perception platform and modules
 interactive IP: Perception platform and modules Angelos Amditis, ICCS 19 th ITS-WC-SIS76: Advanced integrated safety applications based on enhanced perception, active interventions and new advanced sensors
interactive IP: Perception platform and modules Angelos Amditis, ICCS 19 th ITS-WC-SIS76: Advanced integrated safety applications based on enhanced perception, active interventions and new advanced sensors
Autonomous driving made safe
 tm Autonomous driving made safe Founder, Bio Celite Milbrandt Austin, Texas since 1998 Founder of Slacker Radio In dash for Tesla, GM, and Ford. 35M active users 2008 Chief Product Officer of RideScout
tm Autonomous driving made safe Founder, Bio Celite Milbrandt Austin, Texas since 1998 Founder of Slacker Radio In dash for Tesla, GM, and Ford. 35M active users 2008 Chief Product Officer of RideScout
HAVEit Highly Automated Vehicles for Intelligent Transport
 HAVEit Highly Automated Vehicles for Intelligent Transport Holger Zeng Project Manager CONTINENTAL AUTOMOTIVE HAVEit General Information Project full title: Highly Automated Vehicles for Intelligent Transport
HAVEit Highly Automated Vehicles for Intelligent Transport Holger Zeng Project Manager CONTINENTAL AUTOMOTIVE HAVEit General Information Project full title: Highly Automated Vehicles for Intelligent Transport
Final Report Non Hit Car And Truck
 Final Report Non Hit Car And Truck 2010-2013 Project within Vehicle and Traffic Safety Author: Anders Almevad Date 2014-03-17 Content 1. Executive summary... 3 2. Background... 3. Objective... 4. Project
Final Report Non Hit Car And Truck 2010-2013 Project within Vehicle and Traffic Safety Author: Anders Almevad Date 2014-03-17 Content 1. Executive summary... 3 2. Background... 3. Objective... 4. Project
Visione per il veicolo Paolo Medici 2017/ Visual Perception
 Visione per il veicolo Paolo Medici 2017/2018 02 Visual Perception Today Sensor Suite for Autonomous Vehicle ADAS Hardware for ADAS Sensor Suite Which sensor do you know? Which sensor suite for Which algorithms
Visione per il veicolo Paolo Medici 2017/2018 02 Visual Perception Today Sensor Suite for Autonomous Vehicle ADAS Hardware for ADAS Sensor Suite Which sensor do you know? Which sensor suite for Which algorithms
The GATEway Project London s Autonomous Push
 The GATEway Project London s Autonomous Push 06/2016 Why TRL? Unrivalled industry position with a focus on mobility 80 years independent transport research Public and private sector with global reach 350+
The GATEway Project London s Autonomous Push 06/2016 Why TRL? Unrivalled industry position with a focus on mobility 80 years independent transport research Public and private sector with global reach 350+
Method and Tools Specifications
 Method and Tools Deliverable n. D1.3.2 Method and Tools Sub Project SP1 Requirements and Workpackage WP1.2 Requirements Task n. T1.3.2 Method and Tools Authors N. Pallaro A. Ghiro CRF CRF File name Status
Method and Tools Deliverable n. D1.3.2 Method and Tools Sub Project SP1 Requirements and Workpackage WP1.2 Requirements Task n. T1.3.2 Method and Tools Authors N. Pallaro A. Ghiro CRF CRF File name Status
Evaluation of Connected Vehicle Technology for Concept Proposal Using V2X Testbed
 AUTOMOTIVE Evaluation of Connected Vehicle Technology for Concept Proposal Using V2X Testbed Yoshiaki HAYASHI*, Izumi MEMEZAWA, Takuji KANTOU, Shingo OHASHI, and Koichi TAKAYAMA ----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
AUTOMOTIVE Evaluation of Connected Vehicle Technology for Concept Proposal Using V2X Testbed Yoshiaki HAYASHI*, Izumi MEMEZAWA, Takuji KANTOU, Shingo OHASHI, and Koichi TAKAYAMA ----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
* Intelli Robotic Wheel Chair for Specialty Operations & Physically Challenged
 ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
ADVANCED ROBOTICS SOLUTIONS * Intelli Mobile Robot for Multi Specialty Operations * Advanced Robotic Pick and Place Arm and Hand System * Automatic Color Sensing Robot using PC * AI Based Image Capturing
COVER STORY. how this new architecture will help carmakers master the complexity of autonomous driving.
 COVER STORY Semiconductors NXP ESTABLISHED AND NEW PLAYERS The era of self-driving cars places semiconductor companies at the center of important discussions about standards, methodologies, and design
COVER STORY Semiconductors NXP ESTABLISHED AND NEW PLAYERS The era of self-driving cars places semiconductor companies at the center of important discussions about standards, methodologies, and design
Automated Driving Systems with Model-Based Design for ISO 26262:2018 and SOTIF
 Automated Driving Systems with Model-Based Design for ISO 26262:2018 and SOTIF Konstantin Dmitriev The MathWorks, Inc. Certification and Standards Group 2018 The MathWorks, Inc. 1 Agenda Use of simulation
Automated Driving Systems with Model-Based Design for ISO 26262:2018 and SOTIF Konstantin Dmitriev The MathWorks, Inc. Certification and Standards Group 2018 The MathWorks, Inc. 1 Agenda Use of simulation
Agent. Pengju Ren. Institute of Artificial Intelligence and Robotics
 Agent Pengju Ren Institute of Artificial Intelligence and Robotics pengjuren@xjtu.edu.cn 1 Review: What is AI? Artificial intelligence (AI) is intelligence exhibited by machines. In computer science, the
Agent Pengju Ren Institute of Artificial Intelligence and Robotics pengjuren@xjtu.edu.cn 1 Review: What is AI? Artificial intelligence (AI) is intelligence exhibited by machines. In computer science, the
DENSO
 DENSO www.densocorp-na.com Collaborative Automated Driving Description of Project DENSO is one of the biggest tier one suppliers in the automotive industry, and one of its main goals is to provide solutions
DENSO www.densocorp-na.com Collaborative Automated Driving Description of Project DENSO is one of the biggest tier one suppliers in the automotive industry, and one of its main goals is to provide solutions
Silicon radars and smart algorithms - disruptive innovation in perceptive IoT systems Andy Dewilde PUBLIC
 Silicon radars and smart algorithms - disruptive innovation in perceptive IoT systems Andy Dewilde PUBLIC Fietser in levensgevaar na ongeval met vrachtwagen op Louizaplein Het Laatste Nieuws 16/06/2017
Silicon radars and smart algorithms - disruptive innovation in perceptive IoT systems Andy Dewilde PUBLIC Fietser in levensgevaar na ongeval met vrachtwagen op Louizaplein Het Laatste Nieuws 16/06/2017
Next-generation automotive image processing with ARM Mali-C71
 Next-generation automotive image processing with ARM Mali-C71 Steve Steele Director, Product Marketing Imaging & Vision Group, ARM ARM Tech Forum Taipei July 4th 2017 Pioneers in imaging and vision 2 Automotive
Next-generation automotive image processing with ARM Mali-C71 Steve Steele Director, Product Marketing Imaging & Vision Group, ARM ARM Tech Forum Taipei July 4th 2017 Pioneers in imaging and vision 2 Automotive
William Milam Ford Motor Co
 Sharing technology for a stronger America Verification Challenges in Automotive Embedded Systems William Milam Ford Motor Co Chair USCAR CPS Task Force 10/20/2011 What is USCAR? The United States Council
Sharing technology for a stronger America Verification Challenges in Automotive Embedded Systems William Milam Ford Motor Co Chair USCAR CPS Task Force 10/20/2011 What is USCAR? The United States Council
Service Robots in an Intelligent House
 Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
Service Robots in an Intelligent House Jesus Savage Bio-Robotics Laboratory biorobotics.fi-p.unam.mx School of Engineering Autonomous National University of Mexico UNAM 2017 OUTLINE Introduction A System
Automotive Needs and Expectations towards Next Generation Driving Simulation
 Automotive Needs and Expectations towards Next Generation Driving Simulation Dr. Hans-Peter Schöner - Insight fromoutside -Consulting - Senior Automotive Expert, Driving Simulation Association September
Automotive Needs and Expectations towards Next Generation Driving Simulation Dr. Hans-Peter Schöner - Insight fromoutside -Consulting - Senior Automotive Expert, Driving Simulation Association September
SAFETY CASES: ARGUING THE SAFETY OF AUTONOMOUS SYSTEMS SIMON BURTON DAGSTUHL,
 SAFETY CASES: ARGUING THE SAFETY OF AUTONOMOUS SYSTEMS SIMON BURTON DAGSTUHL, 17.02.2017 The need for safety cases Interaction and Security is becoming more than what happens when things break functional
SAFETY CASES: ARGUING THE SAFETY OF AUTONOMOUS SYSTEMS SIMON BURTON DAGSTUHL, 17.02.2017 The need for safety cases Interaction and Security is becoming more than what happens when things break functional
Road Boundary Estimation in Construction Sites Michael Darms, Matthias Komar, Dirk Waldbauer, Stefan Lüke
 Road Boundary Estimation in Construction Sites Michael Darms, Matthias Komar, Dirk Waldbauer, Stefan Lüke Lanes in Construction Sites Roadway is often bounded by elevated objects (e.g. guidance walls)
Road Boundary Estimation in Construction Sites Michael Darms, Matthias Komar, Dirk Waldbauer, Stefan Lüke Lanes in Construction Sites Roadway is often bounded by elevated objects (e.g. guidance walls)
The 3xD Simulator for Intelligent Vehicles Professor Paul Jennings. 20 th October 2016
 The 3xD Simulator for Intelligent Vehicles Professor Paul Jennings 20 th October 2016 An academic department within the science faculty Established in 1980 by Professor Lord Bhattacharyya as Warwick Manufacturing
The 3xD Simulator for Intelligent Vehicles Professor Paul Jennings 20 th October 2016 An academic department within the science faculty Established in 1980 by Professor Lord Bhattacharyya as Warwick Manufacturing
Neural Networks The New Moore s Law
 Neural Networks The New Moore s Law Chris Rowen, PhD, FIEEE CEO Cognite Ventures December 216 Outline Moore s Law Revisited: Efficiency Drives Productivity Embedded Neural Network Product Segments Efficiency
Neural Networks The New Moore s Law Chris Rowen, PhD, FIEEE CEO Cognite Ventures December 216 Outline Moore s Law Revisited: Efficiency Drives Productivity Embedded Neural Network Product Segments Efficiency
Transformation to Artificial Intelligence with MATLAB Roy Lurie, PhD Vice President of Engineering MATLAB Products
 Transformation to Artificial Intelligence with MATLAB Roy Lurie, PhD Vice President of Engineering MATLAB Products 2018 The MathWorks, Inc. 1 A brief history of the automobile First Commercial Gas Car
Transformation to Artificial Intelligence with MATLAB Roy Lurie, PhD Vice President of Engineering MATLAB Products 2018 The MathWorks, Inc. 1 A brief history of the automobile First Commercial Gas Car
Behaviour-Based Control. IAR Lecture 5 Barbara Webb
 Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
Behaviour-Based Control IAR Lecture 5 Barbara Webb Traditional sense-plan-act approach suggests a vertical (serial) task decomposition Sensors Actuators perception modelling planning task execution motor
MotionDesk. 3-D online animation of simulated mechanical systems in real time. Highlights
 MotionDesk 3-D online animation of simulated mechanical systems in real time Highlights Tight integration to ModelDesk and ASM Enhanced support for all aspects of advanced driver assistance systems (ADAS)
MotionDesk 3-D online animation of simulated mechanical systems in real time Highlights Tight integration to ModelDesk and ASM Enhanced support for all aspects of advanced driver assistance systems (ADAS)
THE NEXT WAVE OF COMPUTING. September 2017
 THE NEXT WAVE OF COMPUTING September 2017 SAFE HARBOR Forward-Looking Statements Except for the historical information contained herein, certain matters in this presentation including, but not limited
THE NEXT WAVE OF COMPUTING September 2017 SAFE HARBOR Forward-Looking Statements Except for the historical information contained herein, certain matters in this presentation including, but not limited
Embracing Complexity. Gavin Walker Development Manager
 Embracing Complexity Gavin Walker Development Manager 1 MATLAB and Simulink Proven Ability to Make the Complex Simpler 1970 Stanford Ph.D. thesis, with thousands of lines of Fortran code 2 MATLAB and Simulink
Embracing Complexity Gavin Walker Development Manager 1 MATLAB and Simulink Proven Ability to Make the Complex Simpler 1970 Stanford Ph.D. thesis, with thousands of lines of Fortran code 2 MATLAB and Simulink
Invited talk IET-Renault Workshop Autonomous Vehicles: From theory to full scale applications Novotel Paris Les Halles, June 18 th 2015
 Risk assessment & Decision-making for safe Vehicle Navigation under Uncertainty Christian LAUGIER, First class Research Director at Inria http://emotion.inrialpes.fr/laugier Contributions from Mathias
Risk assessment & Decision-making for safe Vehicle Navigation under Uncertainty Christian LAUGIER, First class Research Director at Inria http://emotion.inrialpes.fr/laugier Contributions from Mathias
AI Application Processing Requirements
 AI Application Processing Requirements 1 Low Medium High Sensor analysis Activity Recognition (motion sensors) Stress Analysis or Attention Analysis Audio & sound Speech Recognition Object detection Computer
AI Application Processing Requirements 1 Low Medium High Sensor analysis Activity Recognition (motion sensors) Stress Analysis or Attention Analysis Audio & sound Speech Recognition Object detection Computer
Significant Reduction of Validation Efforts for Dynamic Light Functions with FMI for Multi-Domain Integration and Test Platforms
 Significant Reduction of Validation Efforts for Dynamic Light Functions with FMI for Multi-Domain Integration and Test Platforms Dr. Stefan-Alexander Schneider Johannes Frimberger BMW AG, 80788 Munich,
Significant Reduction of Validation Efforts for Dynamic Light Functions with FMI for Multi-Domain Integration and Test Platforms Dr. Stefan-Alexander Schneider Johannes Frimberger BMW AG, 80788 Munich,
KÜNSTLICHE INTELLIGENZ JOBKILLER VON MORGEN?
 KÜNSTLICHE INTELLIGENZ JOBKILLER VON MORGEN? Marc Stampfli https://www.linkedin.com/in/marcstampfli/ https://twitter.com/marc_stampfli E-Mail: mstampfli@nvidia.com INTELLIGENT ROBOTS AND SMART MACHINES
KÜNSTLICHE INTELLIGENZ JOBKILLER VON MORGEN? Marc Stampfli https://www.linkedin.com/in/marcstampfli/ https://twitter.com/marc_stampfli E-Mail: mstampfli@nvidia.com INTELLIGENT ROBOTS AND SMART MACHINES
Using FMI/ SSP for Development of Autonomous Driving
 Using FMI/ SSP for Development of Autonomous Driving presented by Jochen Köhler (ZF) FMI User Meeting 15.05.2017 Prague / Czech Republic H.M. Heinkel S.Rude P. R. Mai J. Köhler M. Rühl / A. Pillekeit Motivation
Using FMI/ SSP for Development of Autonomous Driving presented by Jochen Köhler (ZF) FMI User Meeting 15.05.2017 Prague / Czech Republic H.M. Heinkel S.Rude P. R. Mai J. Köhler M. Rühl / A. Pillekeit Motivation
White paper on CAR28T millimeter wave radar
 White paper on CAR28T millimeter wave radar Hunan Nanoradar Science and Technology Co., Ltd. Version history Date Version Version description 2017-07-13 1.0 the 1st version of white paper on CAR28T Contents
White paper on CAR28T millimeter wave radar Hunan Nanoradar Science and Technology Co., Ltd. Version history Date Version Version description 2017-07-13 1.0 the 1st version of white paper on CAR28T Contents
Available theses (October 2012) MERLIN Group
 MERLIN Group") Available theses (October 2012) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Available theses (October 2012) MERLIN Group Politecnico di Milano - Dipartimento di Elettronica e Informazione MERLIN Group 2 Luca Bascetta bascetta@elet.polimi.it Gianni Ferretti ferretti@elet.polimi.it
Virtual Homologation of Software- Intensive Safety Systems: From ESC to Automated Driving
 Virtual Homologation of Software- Intensive Safety Systems: From ESC to Automated Driving Dr. Houssem Abdellatif Global Head Autonomous Driving & ADAS TÜV SÜD Auto Service Christian Gnandt Lead Engineer
Virtual Homologation of Software- Intensive Safety Systems: From ESC to Automated Driving Dr. Houssem Abdellatif Global Head Autonomous Driving & ADAS TÜV SÜD Auto Service Christian Gnandt Lead Engineer
Digital Transformation. A Game Changer. How Does the Digital Transformation Affect Informatics as a Scientific Discipline?
 Digital Transformation A Game Changer How Does the Digital Transformation Affect Informatics as a Scientific Discipline? Manfred Broy Technische Universität München Institut for Informatics ... the change
Digital Transformation A Game Changer How Does the Digital Transformation Affect Informatics as a Scientific Discipline? Manfred Broy Technische Universität München Institut for Informatics ... the change
Autonomy, how much human in the loop? Architecting systems for complex contexts
 Architecting systems for complex contexts by Gerrit Muller University College of South East Norway e-mail: gaudisite@gmail.com www.gaudisite.nl Abstract The move from today s automotive archictectures
Architecting systems for complex contexts by Gerrit Muller University College of South East Norway e-mail: gaudisite@gmail.com www.gaudisite.nl Abstract The move from today s automotive archictectures
Industrial Keynotes. 06/09/2018 Juan-Les-Pins
 Industrial Keynotes 1 06/09/2018 Juan-Les-Pins Agenda 1. The End of Driving Simulation? 2. Autonomous Vehicles: the new UI 3. Augmented Realities 4. Choose your factions 5. No genuine AI without flawless
Industrial Keynotes 1 06/09/2018 Juan-Les-Pins Agenda 1. The End of Driving Simulation? 2. Autonomous Vehicles: the new UI 3. Augmented Realities 4. Choose your factions 5. No genuine AI without flawless
Embedded Robotics. Software Development & Education Center
 Software Development & Education Center Embedded Robotics Robotics Development with ARM µp INTRODUCTION TO ROBOTICS Types of robots Legged robots Mobile robots Autonomous robots Manual robots Robotic arm
Software Development & Education Center Embedded Robotics Robotics Development with ARM µp INTRODUCTION TO ROBOTICS Types of robots Legged robots Mobile robots Autonomous robots Manual robots Robotic arm
Time Triggered Protocol (TTP/C): A Safety-Critical System Protocol
: A Safety-Critical System Protocol") Time Triggered Protocol (TTP/C): A Safety-Critical System Protocol Literature Review EE382c Fall 1999 Howard Curtis Global Technology Services MCC Robert France Global Software Division Motorola, Inc.
Time Triggered Protocol (TTP/C): A Safety-Critical System Protocol Literature Review EE382c Fall 1999 Howard Curtis Global Technology Services MCC Robert France Global Software Division Motorola, Inc.
Undefined Obstacle Avoidance and Path Planning
 Paper ID #6116 Undefined Obstacle Avoidance and Path Planning Prof. Akram Hossain, Purdue University, Calumet (Tech) Akram Hossain is a professor in the department of Engineering Technology and director
Paper ID #6116 Undefined Obstacle Avoidance and Path Planning Prof. Akram Hossain, Purdue University, Calumet (Tech) Akram Hossain is a professor in the department of Engineering Technology and director
Building a Computer Vision Research Vehicle with ROS
 Building a Computer Vision Research Vehicle with ROS ROSCon 2017 2017-09-21 Vancouver Andreas Fregin, Markus Roth, Markus Braun, Sebastian Krebs & Fabian Flohr Agenda 1. Introduction 2. History 3. Triggering
Building a Computer Vision Research Vehicle with ROS ROSCon 2017 2017-09-21 Vancouver Andreas Fregin, Markus Roth, Markus Braun, Sebastian Krebs & Fabian Flohr Agenda 1. Introduction 2. History 3. Triggering
PerSEE: a Central Sensors Fusion Electronic Control Unit for the development of perception-based ADAS
 10-4 MVA2015 IAPR International Conference on Machine Vision Applications, May 18-22, 2015, Tokyo, JAPAN PerSEE: a Central Sensors Fusion Electronic Control Unit for the development of perception-based
10-4 MVA2015 IAPR International Conference on Machine Vision Applications, May 18-22, 2015, Tokyo, JAPAN PerSEE: a Central Sensors Fusion Electronic Control Unit for the development of perception-based
Séminaire Voiture Autonome: Technologies, Enjeux et Applications February , Paris (France) Asprom UIMM Cap Tronic
 Asprom UIMM Cap Tronic") Embedded Perception & Risk Assessment for next Cars Generation Christian LAUGIER, Research Director at Inria Chroma Team & IRT Nanolec Christian.laugier@inria.fr Contributions from Mathias Perrollaz, Christopher
Embedded Perception & Risk Assessment for next Cars Generation Christian LAUGIER, Research Director at Inria Chroma Team & IRT Nanolec Christian.laugier@inria.fr Contributions from Mathias Perrollaz, Christopher
Deliverable D1.6 Initial System Specifications Executive Summary
 Deliverable D1.6 Initial System Specifications Executive Summary Version 1.0 Dissemination Project Coordination RE Ford Research and Advanced Engineering Europe Due Date 31.10.2010 Version Date 09.02.2011
Deliverable D1.6 Initial System Specifications Executive Summary Version 1.0 Dissemination Project Coordination RE Ford Research and Advanced Engineering Europe Due Date 31.10.2010 Version Date 09.02.2011
Intelligent driving TH« TNO I Innovation for live
 Intelligent driving TNO I Innovation for live TH«Intelligent Transport Systems have become an integral part of the world. In addition to the current ITS systems, intelligent vehicles can make a significant
Intelligent driving TNO I Innovation for live TH«Intelligent Transport Systems have become an integral part of the world. In addition to the current ITS systems, intelligent vehicles can make a significant
Model-Based Design as an Enabler for Supply Chain Collaboration
 CO-DEVELOPMENT MANUFACTURING INNOVATION & SUPPORT Model-Based Design as an Enabler for Supply Chain Collaboration Richard Mijnheer, CEO, 3T Stephan van Beek, Technical Manager, MathWorks Richard Mijnheer
CO-DEVELOPMENT MANUFACTURING INNOVATION & SUPPORT Model-Based Design as an Enabler for Supply Chain Collaboration Richard Mijnheer, CEO, 3T Stephan van Beek, Technical Manager, MathWorks Richard Mijnheer
Horizon 2020 ICT Robotics Work Programme (draft - Publication: 20 October 2015)
") NCP TRAINING BRUSSELS 07 OCTOBER 2015 1 Horizon 2020 ICT Robotics Work Programme 2016 2017 (draft - Publication: 20 October 2015) Cécile Huet Deputy Head of Unit Robotics Directorate General for Communication
NCP TRAINING BRUSSELS 07 OCTOBER 2015 1 Horizon 2020 ICT Robotics Work Programme 2016 2017 (draft - Publication: 20 October 2015) Cécile Huet Deputy Head of Unit Robotics Directorate General for Communication
Safe, Efficient and Effective Testing of Connected and Autonomous Vehicles Paul Jennings. Franco-British Symposium on ITS 5 th October 2016
 Safe, Efficient and Effective Testing of Connected and Autonomous Vehicles Paul Jennings Franco-British Symposium on ITS 5 th October 2016 An academic department within the science faculty Established
Safe, Efficient and Effective Testing of Connected and Autonomous Vehicles Paul Jennings Franco-British Symposium on ITS 5 th October 2016 An academic department within the science faculty Established
Fusion in EU projects and the Perception Approach. Dr. Angelos Amditis interactive Summer School 4-6 July, 2012
 Fusion in EU projects and the Perception Approach Dr. Angelos Amditis interactive Summer School 4-6 July, 2012 Content Introduction Data fusion in european research projects EUCLIDE PReVENT-PF2 SAFESPOT
Fusion in EU projects and the Perception Approach Dr. Angelos Amditis interactive Summer School 4-6 July, 2012 Content Introduction Data fusion in european research projects EUCLIDE PReVENT-PF2 SAFESPOT
Real-Time Testing Made Easy with Simulink Real-Time
 Real-Time Testing Made Easy with Simulink Real-Time Andreas Uschold Application Engineer MathWorks Martin Rosser Technical Sales Engineer Speedgoat 2015 The MathWorks, Inc. 1 Model-Based Design Continuous
Real-Time Testing Made Easy with Simulink Real-Time Andreas Uschold Application Engineer MathWorks Martin Rosser Technical Sales Engineer Speedgoat 2015 The MathWorks, Inc. 1 Model-Based Design Continuous
Positioning Challenges in Cooperative Vehicular Safety Systems
 Positioning Challenges in Cooperative Vehicular Safety Systems Dr. Luca Delgrossi Mercedes-Benz Research & Development North America, Inc. October 15, 2009 Positioning for Automotive Navigation Personal
Positioning Challenges in Cooperative Vehicular Safety Systems Dr. Luca Delgrossi Mercedes-Benz Research & Development North America, Inc. October 15, 2009 Positioning for Automotive Navigation Personal
Mobile Robots (Wheeled) (Take class notes)
 (Take class notes)") Mobile Robots (Wheeled) (Take class notes) Wheeled mobile robots Wheeled mobile platform controlled by a computer is called mobile robot in a broader sense Wheeled robots have a large scope of types and
Mobile Robots (Wheeled) (Take class notes) Wheeled mobile robots Wheeled mobile platform controlled by a computer is called mobile robot in a broader sense Wheeled robots have a large scope of types and
Advanced Techniques for Mobile Robotics Location-Based Activity Recognition
 Advanced Techniques for Mobile Robotics Location-Based Activity Recognition Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz Activity Recognition Based on L. Liao, D. J. Patterson, D. Fox,
Advanced Techniques for Mobile Robotics Location-Based Activity Recognition Wolfram Burgard, Cyrill Stachniss, Kai Arras, Maren Bennewitz Activity Recognition Based on L. Liao, D. J. Patterson, D. Fox,
CS6700: The Emergence of Intelligent Machines. Prof. Carla Gomes Prof. Bart Selman Cornell University
 EMERGENCE OF INTELLIGENT MACHINES: CHALLENGES AND OPPORTUNITIES CS6700: The Emergence of Intelligent Machines Prof. Carla Gomes Prof. Bart Selman Cornell University Artificial Intelligence After a distinguished
EMERGENCE OF INTELLIGENT MACHINES: CHALLENGES AND OPPORTUNITIES CS6700: The Emergence of Intelligent Machines Prof. Carla Gomes Prof. Bart Selman Cornell University Artificial Intelligence After a distinguished
AI for Autonomous Ships Challenges in Design and Validation
 VTT TECHNICAL RESEARCH CENTRE OF FINLAND LTD AI for Autonomous Ships Challenges in Design and Validation ISSAV 2018 Eetu Heikkilä Autonomous ships - activities in VTT Autonomous ship systems Unmanned engine
VTT TECHNICAL RESEARCH CENTRE OF FINLAND LTD AI for Autonomous Ships Challenges in Design and Validation ISSAV 2018 Eetu Heikkilä Autonomous ships - activities in VTT Autonomous ship systems Unmanned engine
Making your ISO Flow Flawless Establishing Confidence in Verification Tools
 Making your ISO 26262 Flow Flawless Establishing Confidence in Verification Tools Bryan Ramirez DVT Automotive Product Manager August 2015 What is Tool Confidence? Principle: If a tool supports any process
Making your ISO 26262 Flow Flawless Establishing Confidence in Verification Tools Bryan Ramirez DVT Automotive Product Manager August 2015 What is Tool Confidence? Principle: If a tool supports any process
Perception. Read: AIMA Chapter 24 & Chapter HW#8 due today. Vision
 11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
11-25-2013 Perception Vision Read: AIMA Chapter 24 & Chapter 25.3 HW#8 due today visual aural haptic & tactile vestibular (balance: equilibrium, acceleration, and orientation wrt gravity) olfactory taste
Developing a New Type of Light System in an Automobile and Implementing Its Prototype. on Hazards
 page Seite 12 KIT Developing a New Type of Light System in an Automobile and Implementing Its Prototype Spotlight on Hazards An innovative new light function offers motorists more safety and comfort during
page Seite 12 KIT Developing a New Type of Light System in an Automobile and Implementing Its Prototype Spotlight on Hazards An innovative new light function offers motorists more safety and comfort during
P1.4. Light has to go where it is needed: Future Light Based Driver Assistance Systems
 Light has to go where it is needed: Future Light Based Driver Assistance Systems Thomas Könning¹, Christian Amsel¹, Ingo Hoffmann² ¹ Hella KGaA Hueck & Co., Lippstadt, Germany ² Hella-Aglaia Mobile Vision
Light has to go where it is needed: Future Light Based Driver Assistance Systems Thomas Könning¹, Christian Amsel¹, Ingo Hoffmann² ¹ Hella KGaA Hueck & Co., Lippstadt, Germany ² Hella-Aglaia Mobile Vision
MACHINE LEARNING Games and Beyond. Calvin Lin, NVIDIA
 MACHINE LEARNING Games and Beyond Calvin Lin, NVIDIA THE MACHINE LEARNING ERA IS HERE And it is transforming every industry... including Game Development OVERVIEW NVIDIA Volta: An Architecture for Machine
MACHINE LEARNING Games and Beyond Calvin Lin, NVIDIA THE MACHINE LEARNING ERA IS HERE And it is transforming every industry... including Game Development OVERVIEW NVIDIA Volta: An Architecture for Machine
Stanford Center for AI Safety
 Stanford Center for AI Safety Clark Barrett, David L. Dill, Mykel J. Kochenderfer, Dorsa Sadigh 1 Introduction Software-based systems play important roles in many areas of modern life, including manufacturing,
Stanford Center for AI Safety Clark Barrett, David L. Dill, Mykel J. Kochenderfer, Dorsa Sadigh 1 Introduction Software-based systems play important roles in many areas of modern life, including manufacturing,
Roadside Range Sensors for Intersection Decision Support
 Roadside Range Sensors for Intersection Decision Support Arvind Menon, Alec Gorjestani, Craig Shankwitz and Max Donath, Member, IEEE Abstract The Intelligent Transportation Institute at the University
Roadside Range Sensors for Intersection Decision Support Arvind Menon, Alec Gorjestani, Craig Shankwitz and Max Donath, Member, IEEE Abstract The Intelligent Transportation Institute at the University
DEEP LEARNING A NEW COMPUTING MODEL. Sundara R Nagalingam Head Deep Learning Practice
 DEEP LEARNING A NEW COMPUTING MODEL Sundara R Nagalingam Head Deep Learning Practice snagalingam@nvidia.com THE ERA OF AI AI CLOUD MOBILE PC 2 DEEP LEARNING Raw data Low-level features Mid-level features
DEEP LEARNING A NEW COMPUTING MODEL Sundara R Nagalingam Head Deep Learning Practice snagalingam@nvidia.com THE ERA OF AI AI CLOUD MOBILE PC 2 DEEP LEARNING Raw data Low-level features Mid-level features
UTILIZATION OF ROBOTICS AS CONTEMPORARY TECHNOLOGY AND AN EFFECTIVE TOOL IN TEACHING COMPUTER PROGRAMMING
 UTILIZATION OF ROBOTICS AS CONTEMPORARY TECHNOLOGY AND AN EFFECTIVE TOOL IN TEACHING COMPUTER PROGRAMMING Aaron R. Rababaah* 1, Ahmad A. Rabaa i 2 1 arababaah@auk.edu.kw 2 arabaai@auk.edu.kw Abstract Traditional
UTILIZATION OF ROBOTICS AS CONTEMPORARY TECHNOLOGY AND AN EFFECTIVE TOOL IN TEACHING COMPUTER PROGRAMMING Aaron R. Rababaah* 1, Ahmad A. Rabaa i 2 1 arababaah@auk.edu.kw 2 arabaai@auk.edu.kw Abstract Traditional
Function architectures relevance in automotive research and education Bengt Jacobson, Chalmers
 Function architectures relevance in automotive research and education Bengt Jacobson, Chalmers 1 Why and what is Function Architecture 2 Why architectures? A vehicle is a complex product but still affordable
Function architectures relevance in automotive research and education Bengt Jacobson, Chalmers 1 Why and what is Function Architecture 2 Why architectures? A vehicle is a complex product but still affordable
Ricoh's Machine Vision: A Window on the Future
 White Paper Ricoh's Machine Vision: A Window on the Future As the range of machine vision applications continues to expand, Ricoh is providing new value propositions that integrate the optics, electronic
White Paper Ricoh's Machine Vision: A Window on the Future As the range of machine vision applications continues to expand, Ricoh is providing new value propositions that integrate the optics, electronic
How do you teach AI the value of trust?
 How do you teach AI the value of trust? AI is different from traditional IT systems and brings with it a new set of opportunities and risks. To build trust in AI organizations will need to go beyond monitoring
How do you teach AI the value of trust? AI is different from traditional IT systems and brings with it a new set of opportunities and risks. To build trust in AI organizations will need to go beyond monitoring
Powering Automotive Cockpit Electronics
 White Paper Powering Automotive Cockpit Electronics Introduction The growth of automotive cockpit electronics has exploded over the past decade. Previously, self-contained systems such as steering, braking,
White Paper Powering Automotive Cockpit Electronics Introduction The growth of automotive cockpit electronics has exploded over the past decade. Previously, self-contained systems such as steering, braking,
Wheeled Mobile Robot Obstacle Avoidance Using Compass and Ultrasonic
 Universal Journal of Control and Automation 6(1): 13-18, 2018 DOI: 10.13189/ujca.2018.060102 http://www.hrpub.org Wheeled Mobile Robot Obstacle Avoidance Using Compass and Ultrasonic Yousef Moh. Abueejela
Universal Journal of Control and Automation 6(1): 13-18, 2018 DOI: 10.13189/ujca.2018.060102 http://www.hrpub.org Wheeled Mobile Robot Obstacle Avoidance Using Compass and Ultrasonic Yousef Moh. Abueejela
ICT4 Manuf. Competence Center
 ICT4 Manuf. Competence Center Prof. Yacine Ouzrout University Lumiere Lyon 2 ICT 4 Manufacturing Competence Center AI and CPS for Manufacturing Robot software testing Development of software technologies
ICT4 Manuf. Competence Center Prof. Yacine Ouzrout University Lumiere Lyon 2 ICT 4 Manufacturing Competence Center AI and CPS for Manufacturing Robot software testing Development of software technologies