Visione per il veicolo Paolo Medici 2017/ Visual Perception
|
|
|
- Emery Waters
- 5 years ago
- Views:
Transcription
1 Visione per il veicolo Paolo Medici 2017/ Visual Perception
2 Today Sensor Suite for Autonomous Vehicle ADAS Hardware for ADAS
3 Sensor Suite Which sensor do you know? Which sensor suite for Which algorithms are required for 1. Driving in the desert 2. Driving in simplified urban environment 3. Driving in normal urban environment
4 Sensor suite Sensor Suite for Autonomous driving: Stanley Boss BRAIVE VIAC KIT Google Tesla LIDARs for Autonomous Driving ADAS Cameras for Autonomous Driving


5 Stanley - 5 LIDAR - 1 camera - 1 RADAR - GPS/IMU

6 Boss
7 Boss
 360 26-deg FOV with 0.1-deg angular resolution 70-m maximum range Continental ISF 172 LIDAR (ISF) 12 3.")
8 Boss Applanix POS-LV 220/420 GPS/IMU (APLX) Submeter accuracy with Omnistar VBS corrections Tightly coupled inertial/gps bridges GPS outages SICK LMS 291-S05/S14 LIDAR (LMS) 180/90 deg 0.9 deg FOV with 1/0.5-deg angular resolution 80-m maximum range Velodyne HDL-64 LIDAR (HDL) deg FOV with 0.1-deg angular resolution 70-m maximum range Continental ISF 172 LIDAR (ISF) deg FOV 150-m maximum range IBEO Alasca XT LIDAR (XT) deg FOV 300-m maximum range Continental ARS 300 Radar (ARS) 60/17 deg 3.2 deg FOV 60-m/200-m maximum range Point Grey Firefly (PGF) High-dynamic-range camera 45-deg FOV

9
10 The BRAiVE sensing technology Front sensing 4 cameras (2 graylevel, 2 color)
11 The BRAiVE sensing technology Lateral sensing
12 The BRAiVE sensing technology Rear sensing
13 The BRAiVE sensing technology Back sensing Stereo cameras
14 BRAiVE all-round vision coverage
15 The BRAiVE sensing technology Single plane laser scanners 2 frontal, 1 backward
16 The BRAiVE sensing technology Multiplane laser scanner
17 The BRAiVE sensing technology 16 Laser beams

18 The BRAiVE sensing technology DGPS + IMU

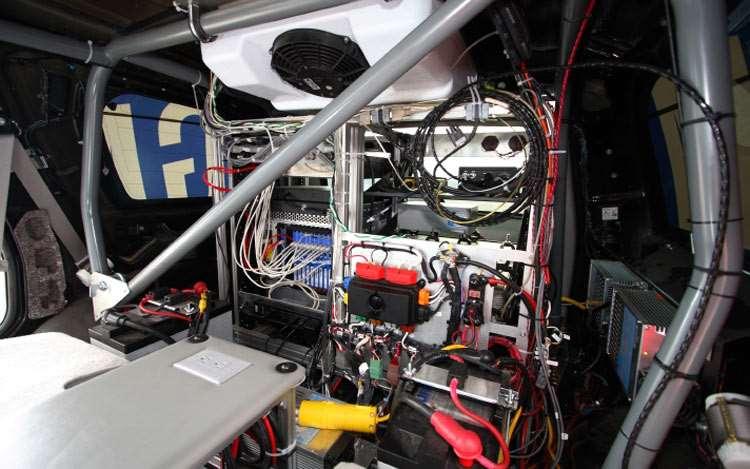
19 BRAiVE s processing BRAiVE s data processing is performed by 4 PCs Each PC is in charge of specific sensing areas One PC is in charge of vehicle control


20 VIAC The Sensing Suite 7 cameras 4 laserscanners GPS V2V radio + Additional devices
21 KIT Two stereo rigs ( px, 54 cm base, 90 opening) Velodyne HDL-64E laser scanner GPS+IMU localization
22 KIT 2 PointGray Flea2 gray scale cameras(fl2-14s3m-c), 1.4 Megapixels, 1/2 Sony ICX267 CCD, global shutter 2 PointGray Flea2 color cameras(fl2-14s3c-c), 1.4 Megapixels, 1/2 Sony ICX267 CCD, global shutter 4 Edmund Optics lenses, 4mm, opening angle 90, vertical opening angle of region of interest (ROI) 35 1 Velodyne HDL-64Erotating 3D laser scanner, 10 Hz, 64 beams, 0.09 degree angular resolution, 2 cm distance accuracy, collecting 1.3 million points/second, field of view: 360 horizontal, 26.8 vertical, range: 120 m 1 OXTS RT3003inertial and GPS navigation system, 6 axis, 100 Hz, L1/L2 RTK, resolution: 0.02m / 0.1
 Cam 0 (gray) Cam 2 (color) z 1.68 m 0.80 m -to-image x y x 0.27 m z y Velo-to-Cam IMU-to-Velo GPS/IMU x (height: 0.93 m) 0.81 m 0.05 m z y 0.32 m 0.48 m 2.71 m Figure :Sensor Setup.")
23 All heights wrt. road surface 1.60 m Wheel axis (height: 0.30m) 0.06 m 0.54 m All camera heights: 1.65 m Cam 1 (gray) 0.06 m Cam 3 (color) Cam-to-Cam Rect Velodyne laserscanner & CamRect (height: 1.73 m) Cam 0 (gray) Cam 2 (color) z 1.68 m 0.80 m -to-image x y x 0.27 m z y Velo-to-Cam IMU-to-Velo GPS/IMU x (height: 0.93 m) 0.81 m 0.05 m z y 0.32 m 0.48 m 2.71 m Figure :Sensor Setup. dimensions and mounting positions of the sensors (red) with respect to the vehicle body. Heights above ground are marked in green and measured with respect to the road surface. Transformations between sensors are shown in blue. Jan 12, 2016 CSC 2541: 01-Introduction


24 What s the problem of using so many sensors? One has to Calibrate and Registered them Different 3D locations Different capture times Different types of capture: instantaneous vs scanning



25 Google Car

26 Google Car Play Video


27 Google
28 Google



29 Velodyne LIDAR

30 Velodyne HDL64 LIDAR

31 Different Velodyne LIDARs

32 IBEO LIDARs

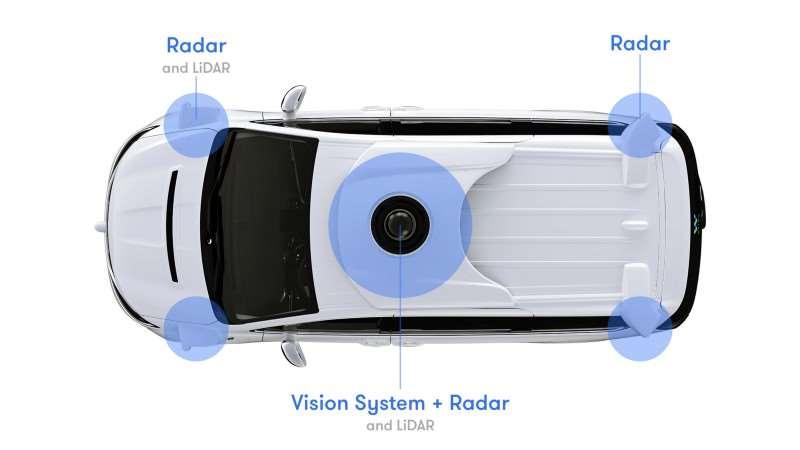
33 Tesla Sensor Suite
34 Tesla Sensor Suite A forward radar A forward-looking camera 12 long-range ultrasonic sensors positioned to sense 16 feet around the car in every direction at all speeds GPS A high-precision digitally-controlled electric assist breaking system Autopilot is on the Market on Model S
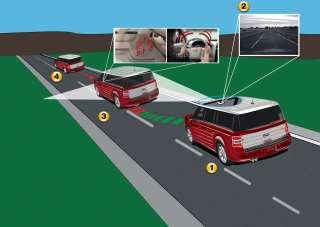
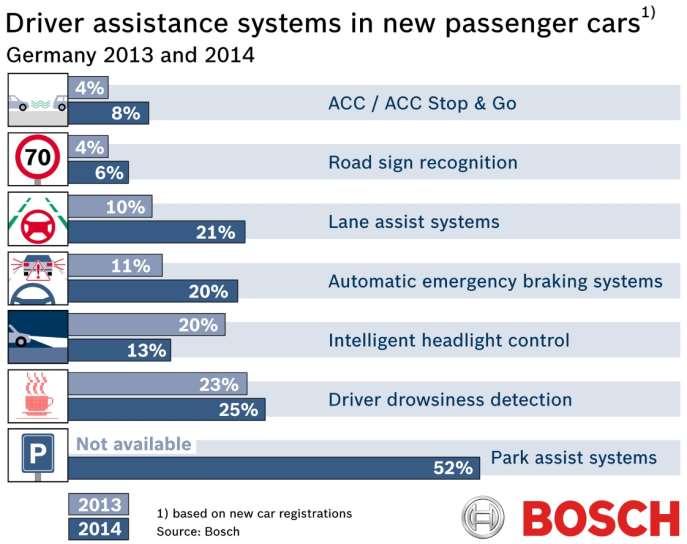
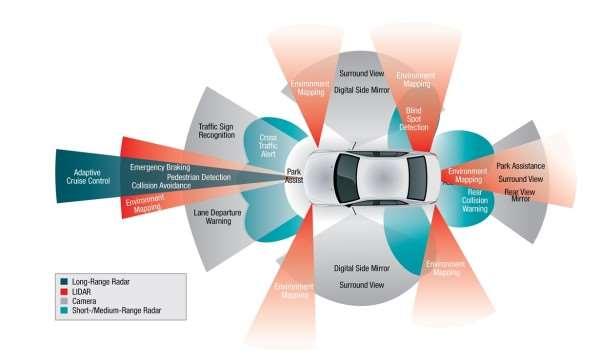
35 ADAS Active Park Assist Lane Departure Warning Traffic Sign Recognition Adaptive Cruise Control / ACC Stop & Go Forward Collision Warning / Emergency Breaking Blind Spot Detection Intelligent HeadLamp Control Pedestrian Detection

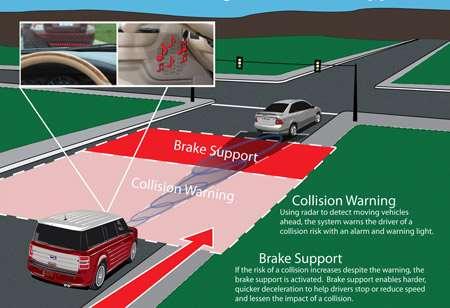
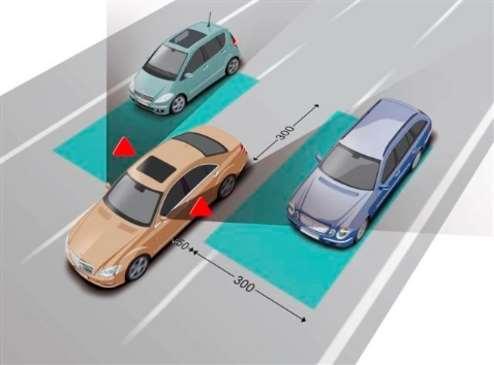
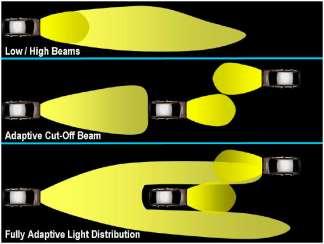
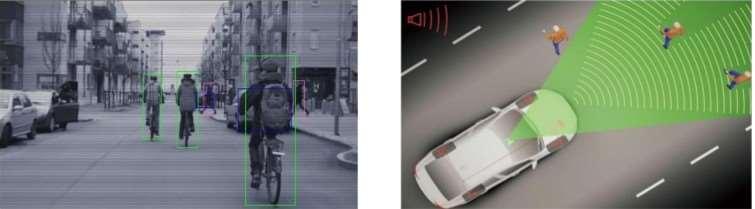
36 ADAS
37 ADAS
38 ADAS

39
40
41 ADAS
42 ADAS
43 Camera Sensor Resolution Pitch Size Technology Sensitivity Lens FOV Aperture Automotive Hardware problem
44 Autonomotive Hardware AEC-Q100 standard Operating temperature Grade 0: -40 C to +150 C Grade 1: -40 C to +125 C Grade 2: -40 C to +105 C Grade 3: -40 C to +85 C Grade 4: 0 C to +70 C Storage Temperature (higher!) Mechanical Shock Vibration

45 CCD Good Sensitivity Optical Blooming!

46 CCD vs CMOS

47 Rolling Shutter

48 Rolling vs Global

49 Rolling Shutter

50 Rolling Shutter
51 Rolling Shutter Each image row (pixel) has different time Pixels of dewarped image have a complex time equation Precise disparity on rectified image is impossible
52 Aperture vs Shutter f/ lens aperture: Depth of Field Light = Lens Aperture = proportional to 1/f 2 Shutter (Exposure) time: light acquired by pixel proportional to shutter
53 Light Conversion Shutter: light vs motion blur light α shutter Aperture: light vs depth of field light α 1/f 2 Pixel size (Pitch size): light vs resolution light α pitch 2 Sensitivity/Capacity
54 Dynamic Range problem DAY: >10^5 lux NIGHT: <10^-1 lux Dynamic Range: ~120db
55 Dynamic Range 8 12 bit ADC: 8 bit 256:1 48db 10bit 1024:1 60db 12bit 4096:1 72db bit 1M:1 120db Hardware vs Multiple Shot Non Linear Mapping Local Mapping (ToneMapping )


56 HDR Hardware


57 HDR MultiShot Images copyright Vislab/Ambarella Inc.
58 HDR Blending X1 =X1+noise X2 =X2+noise A = T2/T1 X1 = A * X1 X =X2 *f2+x1 *f1
59 Video Sensors Good Image Quality: High Sensitivity over a wide Spectrum and Wide Dynamical Range broad temperature range: -40degC degC Some applications also require Color Global Shutter = Expensive! Rolling Shutter = Distortion!
60 WindShield distortion Lens distortion model is radial Windshild distortion is not radial! Spline?
61 Additional Issue Thermal stability: lens parameters, calibration parameters can change during time due to temperature changes. Real Time Calibration? Autocalibration

62 Hardware for ADAS Last Challenge: Energy Efficiency AlphaGo: 1920 CPUs and 280 GPUs, $3000 electric bill per game on mobile: drains battery on data-center: latency? increases TCO
Choosing the Optimum Mix of Sensors for Driver Assistance and Autonomous Vehicles
 Choosing the Optimum Mix of Sensors for Driver Assistance and Autonomous Vehicles Ali Osman Ors May 2, 2017 Copyright 2017 NXP Semiconductors 1 Sensing Technology Comparison Rating: H = High, M=Medium,
Choosing the Optimum Mix of Sensors for Driver Assistance and Autonomous Vehicles Ali Osman Ors May 2, 2017 Copyright 2017 NXP Semiconductors 1 Sensing Technology Comparison Rating: H = High, M=Medium,
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS. Sergii Bykov Technical Lead Machine Learning 12 Oct 2017
 23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
Detection and Tracking of the Vanishing Point on a Horizon for Automotive Applications
 Detection and Tracking of the Vanishing Point on a Horizon for Automotive Applications Young-Woo Seo and Ragunathan (Raj) Rajkumar GM-CMU Autonomous Driving Collaborative Research Lab Carnegie Mellon University
Detection and Tracking of the Vanishing Point on a Horizon for Automotive Applications Young-Woo Seo and Ragunathan (Raj) Rajkumar GM-CMU Autonomous Driving Collaborative Research Lab Carnegie Mellon University
Sensor Fusion for Navigation in Degraded Environements
 Sensor Fusion for Navigation in Degraded Environements David M. Bevly Professor Director of the GPS and Vehicle Dynamics Lab dmbevly@eng.auburn.edu (334) 844-3446 GPS and Vehicle Dynamics Lab Auburn University
Sensor Fusion for Navigation in Degraded Environements David M. Bevly Professor Director of the GPS and Vehicle Dynamics Lab dmbevly@eng.auburn.edu (334) 844-3446 GPS and Vehicle Dynamics Lab Auburn University
Phase One 190MP Aerial System
 White Paper Phase One 190MP Aerial System Introduction Phase One Industrial s 100MP medium format aerial camera systems have earned a worldwide reputation for its high performance. They are commonly used
White Paper Phase One 190MP Aerial System Introduction Phase One Industrial s 100MP medium format aerial camera systems have earned a worldwide reputation for its high performance. They are commonly used
Geometry of Aerial Photographs
 Geometry of Aerial Photographs Aerial Cameras Aerial cameras must be (details in lectures): Geometrically stable Have fast and efficient shutters Have high geometric and optical quality lenses They can
Geometry of Aerial Photographs Aerial Cameras Aerial cameras must be (details in lectures): Geometrically stable Have fast and efficient shutters Have high geometric and optical quality lenses They can
GPS-Aided INS Datasheet Rev. 2.7
 1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS and BEIDOU navigation and highperformance
1 The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS and BEIDOU navigation and highperformance
Test-bed for Unified Perception & Decision Architecture
 Test-bed for Unified Perception & Decision Architecture Luca Bombini, Stefano Cattani, Pietro Cerri, Rean Isabella Fedriga, Mirko Felisa, and Pier Paolo Porta Abstract This paper presents the test-bed
Test-bed for Unified Perception & Decision Architecture Luca Bombini, Stefano Cattani, Pietro Cerri, Rean Isabella Fedriga, Mirko Felisa, and Pier Paolo Porta Abstract This paper presents the test-bed
Exercise questions for Machine vision
 Exercise questions for Machine vision This is a collection of exercise questions. These questions are all examination alike which means that similar questions may appear at the written exam. I ve divided
Exercise questions for Machine vision This is a collection of exercise questions. These questions are all examination alike which means that similar questions may appear at the written exam. I ve divided
CMOS Image Sensors in Cell Phones, Cars and Beyond. Patrick Feng General manager BYD Microelectronics October 8, 2013
 CMOS Image Sensors in Cell Phones, Cars and Beyond Patrick Feng General manager BYD Microelectronics October 8, 2013 BYD Microelectronics (BME) is a subsidiary of BYD Company Limited, Shenzhen, China.
CMOS Image Sensors in Cell Phones, Cars and Beyond Patrick Feng General manager BYD Microelectronics October 8, 2013 BYD Microelectronics (BME) is a subsidiary of BYD Company Limited, Shenzhen, China.
Building a Computer Vision Research Vehicle with ROS
 Building a Computer Vision Research Vehicle with ROS ROSCon 2017 2017-09-21 Vancouver Andreas Fregin, Markus Roth, Markus Braun, Sebastian Krebs & Fabian Flohr Agenda 1. Introduction 2. History 3. Triggering
Building a Computer Vision Research Vehicle with ROS ROSCon 2017 2017-09-21 Vancouver Andreas Fregin, Markus Roth, Markus Braun, Sebastian Krebs & Fabian Flohr Agenda 1. Introduction 2. History 3. Triggering
GPS-Aided INS Datasheet Rev. 3.0
 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS, BEIDOU and L-Band navigation
1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO, QZSS, BEIDOU and L-Band navigation
GPS-Aided INS Datasheet Rev. 2.6
 GPS-Aided INS 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO and BEIDOU navigation
GPS-Aided INS 1 GPS-Aided INS The Inertial Labs Single and Dual Antenna GPS-Aided Inertial Navigation System INS is new generation of fully-integrated, combined GPS, GLONASS, GALILEO and BEIDOU navigation
LENSES. INEL 6088 Computer Vision
 LENSES INEL 6088 Computer Vision Digital camera A digital camera replaces film with a sensor array Each cell in the array is a Charge Coupled Device light-sensitive diode that converts photons to electrons
LENSES INEL 6088 Computer Vision Digital camera A digital camera replaces film with a sensor array Each cell in the array is a Charge Coupled Device light-sensitive diode that converts photons to electrons
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Sensors and Image Formation Imaging sensors and models of image formation Coordinate systems Digital
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Sensors and Image Formation Imaging sensors and models of image formation Coordinate systems Digital
A NEW NEUROMORPHIC STRATEGY FOR THE FUTURE OF VISION FOR MACHINES June Xavier Lagorce Head of Computer Vision & Systems
 A NEW NEUROMORPHIC STRATEGY FOR THE FUTURE OF VISION FOR MACHINES June 2017 Xavier Lagorce Head of Computer Vision & Systems Imagine meeting the promise of Restoring sight to the blind Accident-free autonomous
A NEW NEUROMORPHIC STRATEGY FOR THE FUTURE OF VISION FOR MACHINES June 2017 Xavier Lagorce Head of Computer Vision & Systems Imagine meeting the promise of Restoring sight to the blind Accident-free autonomous
FLASH LiDAR KEY BENEFITS
 In 2013, 1.2 million people died in vehicle accidents. That is one death every 25 seconds. Some of these lives could have been saved with vehicles that have a better understanding of the world around them
In 2013, 1.2 million people died in vehicle accidents. That is one death every 25 seconds. Some of these lives could have been saved with vehicles that have a better understanding of the world around them
White paper on CAR150 millimeter wave radar
 White paper on CAR150 millimeter wave radar Hunan Nanoradar Science and Technology Co.,Ltd. Version history Date Version Version description 2017-02-23 1.0 The 1 st version of white paper on CAR150 Contents
White paper on CAR150 millimeter wave radar Hunan Nanoradar Science and Technology Co.,Ltd. Version history Date Version Version description 2017-02-23 1.0 The 1 st version of white paper on CAR150 Contents
Sony Releases the Industry's Highest Resolution Effective Megapixel Stacked CMOS Image Sensor for Automotive Cameras
 2 International Business Park #05-10 Tower One The Strategy Singapore 609930 Telephone: (65) 6544 8338 Facsimile: (65) 6544 8330 NEWS RELEASE: Immediate Sony Releases the Industry's Highest Resolution
2 International Business Park #05-10 Tower One The Strategy Singapore 609930 Telephone: (65) 6544 8338 Facsimile: (65) 6544 8330 NEWS RELEASE: Immediate Sony Releases the Industry's Highest Resolution
Intelligent Transport Systems and GNSS. ITSNT 2017 ENAC, Toulouse, France 11/ Nobuaki Kubo (TUMSAT)
") Intelligent Transport Systems and GNSS ITSNT 2017 ENAC, Toulouse, France 11/14-17 2017 Nobuaki Kubo (TUMSAT) Contents ITS applications in Japan How can GNSS contribute to ITS? Current performance of GNSS
Intelligent Transport Systems and GNSS ITSNT 2017 ENAC, Toulouse, France 11/14-17 2017 Nobuaki Kubo (TUMSAT) Contents ITS applications in Japan How can GNSS contribute to ITS? Current performance of GNSS
e2v Launches New Onyx 1.3M for Premium Performance in Low Light Conditions
 e2v Launches New Onyx 1.3M for Premium Performance in Low Light Conditions e2v s Onyx family of image sensors is designed for the most demanding outdoor camera and industrial machine vision applications,
e2v Launches New Onyx 1.3M for Premium Performance in Low Light Conditions e2v s Onyx family of image sensors is designed for the most demanding outdoor camera and industrial machine vision applications,
Global Image Sensor Market with Focus on Automotive CMOS Sensors: Industry Analysis & Outlook ( )
") Industry Research by Koncept Analytics Global Image Sensor Market with Focus on Automotive CMOS Sensors: Industry Analysis & Outlook ----------------------------------------- (2017-2021) October 2017 Global
Industry Research by Koncept Analytics Global Image Sensor Market with Focus on Automotive CMOS Sensors: Industry Analysis & Outlook ----------------------------------------- (2017-2021) October 2017 Global
White paper on CAR28T millimeter wave radar
 White paper on CAR28T millimeter wave radar Hunan Nanoradar Science and Technology Co., Ltd. Version history Date Version Version description 2017-07-13 1.0 the 1st version of white paper on CAR28T Contents
White paper on CAR28T millimeter wave radar Hunan Nanoradar Science and Technology Co., Ltd. Version history Date Version Version description 2017-07-13 1.0 the 1st version of white paper on CAR28T Contents
and Vehicle Sensors in Urban Environment
 AvailabilityImprovement ofrtk GPS GPSwithIMU and Vehicle Sensors in Urban Environment ION GPS/GNSS 2012 Tk Tokyo University it of Marine Si Science and Technology Nobuaki Kubo, Chen Dihan 1 Contents Background
AvailabilityImprovement ofrtk GPS GPSwithIMU and Vehicle Sensors in Urban Environment ION GPS/GNSS 2012 Tk Tokyo University it of Marine Si Science and Technology Nobuaki Kubo, Chen Dihan 1 Contents Background
1 st IFAC Conference on Mechatronic Systems - Mechatronics 2000, September 18-20, 2000, Darmstadt, Germany
 1 st IFAC Conference on Mechatronic Systems - Mechatronics 2000, September 18-20, 2000, Darmstadt, Germany SPACE APPLICATION OF A SELF-CALIBRATING OPTICAL PROCESSOR FOR HARSH MECHANICAL ENVIRONMENT V.
1 st IFAC Conference on Mechatronic Systems - Mechatronics 2000, September 18-20, 2000, Darmstadt, Germany SPACE APPLICATION OF A SELF-CALIBRATING OPTICAL PROCESSOR FOR HARSH MECHANICAL ENVIRONMENT V.
pco.edge 4.2 LT 0.8 electrons 2048 x 2048 pixel 40 fps up to :1 up to 82 % pco. low noise high resolution high speed high dynamic range
 edge 4.2 LT scientific CMOS camera high resolution 2048 x 2048 pixel low noise 0.8 electrons USB 3.0 small form factor high dynamic range up to 37 500:1 high speed 40 fps high quantum efficiency up to
edge 4.2 LT scientific CMOS camera high resolution 2048 x 2048 pixel low noise 0.8 electrons USB 3.0 small form factor high dynamic range up to 37 500:1 high speed 40 fps high quantum efficiency up to
TECHNOLOGY DEVELOPMENT AREAS IN AAWA
 TECHNOLOGY DEVELOPMENT AREAS IN AAWA Technologies for realizing remote and autonomous ships exist. The task is to find the optimum way to combine them reliably and cost effecticely. Ship state definition
TECHNOLOGY DEVELOPMENT AREAS IN AAWA Technologies for realizing remote and autonomous ships exist. The task is to find the optimum way to combine them reliably and cost effecticely. Ship state definition
HiFi Radar Target. Kristian Karlsson (RISE)
") HiFi Radar Target Kristian Karlsson (RISE) Outline HiFi Radar Target: Overview Background & goals Radar introduction RCS measurements: Setups Uncertainty contributions (ground reflection) Back scattering
HiFi Radar Target Kristian Karlsson (RISE) Outline HiFi Radar Target: Overview Background & goals Radar introduction RCS measurements: Setups Uncertainty contributions (ground reflection) Back scattering
LED flicker: Root cause, impact and measurement for automotive imaging applications
 https://doi.org/10.2352/issn.2470-1173.2018.17.avm-146 2018, Society for Imaging Science and Technology LED flicker: Root cause, impact and measurement for automotive imaging applications Brian Deegan;
https://doi.org/10.2352/issn.2470-1173.2018.17.avm-146 2018, Society for Imaging Science and Technology LED flicker: Root cause, impact and measurement for automotive imaging applications Brian Deegan;
Metadata of the chapter that will be visualized online
 Metadata of the chapter that will be visualized online ChapterTitle Chapter Sub-Title Camera-Based Automotive Systems Chapter CopyRight - Year Springer Science+Business Media, LLC (This will be the copyright
Metadata of the chapter that will be visualized online ChapterTitle Chapter Sub-Title Camera-Based Automotive Systems Chapter CopyRight - Year Springer Science+Business Media, LLC (This will be the copyright
A Positon and Orientation Post-Processing Software Package for Land Applications - New Technology
 A Positon and Orientation Post-Processing Software Package for Land Applications - New Technology Tatyana Bourke, Applanix Corporation Abstract This paper describes a post-processing software package that
A Positon and Orientation Post-Processing Software Package for Land Applications - New Technology Tatyana Bourke, Applanix Corporation Abstract This paper describes a post-processing software package that
Perception platform and fusion modules results. Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event
 Perception platform and fusion modules results Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event 20 th -21 st November 2013 Agenda Introduction Environment Perception in Intelligent Transport
Perception platform and fusion modules results Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event 20 th -21 st November 2013 Agenda Introduction Environment Perception in Intelligent Transport
Positioning Challenges in Cooperative Vehicular Safety Systems
 Positioning Challenges in Cooperative Vehicular Safety Systems Dr. Luca Delgrossi Mercedes-Benz Research & Development North America, Inc. October 15, 2009 Positioning for Automotive Navigation Personal
Positioning Challenges in Cooperative Vehicular Safety Systems Dr. Luca Delgrossi Mercedes-Benz Research & Development North America, Inc. October 15, 2009 Positioning for Automotive Navigation Personal
Advances in Vehicle Periphery Sensing Techniques Aimed at Realizing Autonomous Driving
 FEATURED ARTICLES Autonomous Driving Technology for Connected Cars Advances in Vehicle Periphery Sensing Techniques Aimed at Realizing Autonomous Driving Progress is being made on vehicle periphery sensing,
FEATURED ARTICLES Autonomous Driving Technology for Connected Cars Advances in Vehicle Periphery Sensing Techniques Aimed at Realizing Autonomous Driving Progress is being made on vehicle periphery sensing,
SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results
 SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results Angelos Amditis (ICCS) and Lali Ghosh (DEL) 18 th October 2013 20 th ITS World
SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results Angelos Amditis (ICCS) and Lali Ghosh (DEL) 18 th October 2013 20 th ITS World
WHITE PAPER. Sensor Comparison: Are All IMXs Equal? Contents. 1. The sensors in the Pregius series
 WHITE PAPER www.baslerweb.com Comparison: Are All IMXs Equal? There have been many reports about the Sony Pregius sensors in recent months. The goal of this White Paper is to show what lies behind the
WHITE PAPER www.baslerweb.com Comparison: Are All IMXs Equal? There have been many reports about the Sony Pregius sensors in recent months. The goal of this White Paper is to show what lies behind the
IHV means Independent Hardware Vendor. Example is Qualcomm Technologies Inc. that makes Snapdragon processors. OEM means Original Equipment
 1 2 IHV means Independent Hardware Vendor. Example is Qualcomm Technologies Inc. that makes Snapdragon processors. OEM means Original Equipment Manufacturer. Examples are smartphone manufacturers. Tuning
1 2 IHV means Independent Hardware Vendor. Example is Qualcomm Technologies Inc. that makes Snapdragon processors. OEM means Original Equipment Manufacturer. Examples are smartphone manufacturers. Tuning
IMAGE ACQUISITION GUIDELINES FOR SFM
 IMAGE ACQUISITION GUIDELINES FOR SFM a.k.a. Close-range photogrammetry (as opposed to aerial/satellite photogrammetry) Basic SfM requirements (The Golden Rule): minimum of 60% overlap between the adjacent
IMAGE ACQUISITION GUIDELINES FOR SFM a.k.a. Close-range photogrammetry (as opposed to aerial/satellite photogrammetry) Basic SfM requirements (The Golden Rule): minimum of 60% overlap between the adjacent
P1.4. Light has to go where it is needed: Future Light Based Driver Assistance Systems
 Light has to go where it is needed: Future Light Based Driver Assistance Systems Thomas Könning¹, Christian Amsel¹, Ingo Hoffmann² ¹ Hella KGaA Hueck & Co., Lippstadt, Germany ² Hella-Aglaia Mobile Vision
Light has to go where it is needed: Future Light Based Driver Assistance Systems Thomas Könning¹, Christian Amsel¹, Ingo Hoffmann² ¹ Hella KGaA Hueck & Co., Lippstadt, Germany ² Hella-Aglaia Mobile Vision
FLCS V2.1. AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station
 AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station The platform provides a high performance basis for electromechanical system control. Originally designed for autonomous aerial vehicle
AHRS, Autopilot, Gyro Stabilized Gimbals Control, Ground Control Station The platform provides a high performance basis for electromechanical system control. Originally designed for autonomous aerial vehicle
An Information Fusion Method for Vehicle Positioning System
 An Information Fusion Method for Vehicle Positioning System Yi Yan, Che-Cheng Chang and Wun-Sheng Yao Abstract Vehicle positioning techniques have a broad application in advanced driver assistant system
An Information Fusion Method for Vehicle Positioning System Yi Yan, Che-Cheng Chang and Wun-Sheng Yao Abstract Vehicle positioning techniques have a broad application in advanced driver assistant system
ATLANS-C. mobile mapping position and orientation solution
 mobile mapping position and orientation solution mobile mapping position and orientation solution THE SMALLEST ATLANS-C is a high performance all-in-one position and orientation solution for both land
mobile mapping position and orientation solution mobile mapping position and orientation solution THE SMALLEST ATLANS-C is a high performance all-in-one position and orientation solution for both land
GEO 428: DEMs from GPS, Imagery, & Lidar Tuesday, September 11
 GEO 428: DEMs from GPS, Imagery, & Lidar Tuesday, September 11 Global Positioning Systems GPS is a technology that provides Location coordinates Elevation For any location with a decent view of the sky
GEO 428: DEMs from GPS, Imagery, & Lidar Tuesday, September 11 Global Positioning Systems GPS is a technology that provides Location coordinates Elevation For any location with a decent view of the sky
Applying Automated Optical Inspection Ben Dawson, DALSA Coreco Inc., ipd Group (987)
") Applying Automated Optical Inspection Ben Dawson, DALSA Coreco Inc., ipd Group bdawson@goipd.com (987) 670-2050 Introduction Automated Optical Inspection (AOI) uses lighting, cameras, and vision computers
Applying Automated Optical Inspection Ben Dawson, DALSA Coreco Inc., ipd Group bdawson@goipd.com (987) 670-2050 Introduction Automated Optical Inspection (AOI) uses lighting, cameras, and vision computers
MIT CSAIL Advances in Computer Vision Fall Problem Set 6: Anaglyph Camera Obscura
 MIT CSAIL 6.869 Advances in Computer Vision Fall 2013 Problem Set 6: Anaglyph Camera Obscura Posted: Tuesday, October 8, 2013 Due: Thursday, October 17, 2013 You should submit a hard copy of your work
MIT CSAIL 6.869 Advances in Computer Vision Fall 2013 Problem Set 6: Anaglyph Camera Obscura Posted: Tuesday, October 8, 2013 Due: Thursday, October 17, 2013 You should submit a hard copy of your work
Princeton University COS429 Computer Vision Problem Set 1: Building a Camera
 Princeton University COS429 Computer Vision Problem Set 1: Building a Camera What to submit: You need to submit two files: one PDF file for the report that contains your name, Princeton NetID, all the
Princeton University COS429 Computer Vision Problem Set 1: Building a Camera What to submit: You need to submit two files: one PDF file for the report that contains your name, Princeton NetID, all the
Information & Instructions
 KEY FEATURES 1. USB 3.0 For the Fastest Transfer Rates Up to 10X faster than regular USB 2.0 connections (also USB 2.0 compatible) 2. High Resolution 4.2 MegaPixels resolution gives accurate profile measurements
KEY FEATURES 1. USB 3.0 For the Fastest Transfer Rates Up to 10X faster than regular USB 2.0 connections (also USB 2.0 compatible) 2. High Resolution 4.2 MegaPixels resolution gives accurate profile measurements
HALS-H1 Ground Surveillance & Targeting Helicopter
 ARATOS-SWISS Homeland Security AG & SMA PROGRESS, LLC HALS-H1 Ground Surveillance & Targeting Helicopter Defense, Emergency, Homeland Security (Border Patrol, Pipeline Monitoring)... Automatic detection
ARATOS-SWISS Homeland Security AG & SMA PROGRESS, LLC HALS-H1 Ground Surveillance & Targeting Helicopter Defense, Emergency, Homeland Security (Border Patrol, Pipeline Monitoring)... Automatic detection
Lecture 19: Depth Cameras. Kayvon Fatahalian CMU : Graphics and Imaging Architectures (Fall 2011)
") Lecture 19: Depth Cameras Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Continuing theme: computational photography Cheap cameras capture light, extensive processing produces
Lecture 19: Depth Cameras Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Continuing theme: computational photography Cheap cameras capture light, extensive processing produces
TECHNICAL DATA. OPTIV CLASSIC 322 Version 3/2013
 TECHNICAL DATA OPTIV CLASSIC 322 Version 3/2013 Technical Data Product description The Optiv Classic 322 combines optical and tactile measurement in one system (optional touchtrigger probe). The system
TECHNICAL DATA OPTIV CLASSIC 322 Version 3/2013 Technical Data Product description The Optiv Classic 322 combines optical and tactile measurement in one system (optional touchtrigger probe). The system
HIGHTS: towards sub-meter positioning accuracy in vehicular networks. Jérôme Härri (EURECOM) on Behalf of HIGHTS ETSI ITS Workshop March 6-8, 2018
 on Behalf of HIGHTS ETSI ITS Workshop March 6-8, 2018") HIGHTS: towards sub-meter positioning accuracy in vehicular networks Jérôme Härri (EURECOM) on Behalf of HIGHTS ETSI ITS Workshop March 6-8, 2018 The HIGHTS Consortium 09.03.2018 H2020 HIGHTS Project 2
HIGHTS: towards sub-meter positioning accuracy in vehicular networks Jérôme Härri (EURECOM) on Behalf of HIGHTS ETSI ITS Workshop March 6-8, 2018 The HIGHTS Consortium 09.03.2018 H2020 HIGHTS Project 2
interactive IP: Perception platform and modules
 interactive IP: Perception platform and modules Angelos Amditis, ICCS 19 th ITS-WC-SIS76: Advanced integrated safety applications based on enhanced perception, active interventions and new advanced sensors
interactive IP: Perception platform and modules Angelos Amditis, ICCS 19 th ITS-WC-SIS76: Advanced integrated safety applications based on enhanced perception, active interventions and new advanced sensors
SMARTSCAN Smart Pushbroom Imaging System for Shaky Space Platforms
 SMARTSCAN Smart Pushbroom Imaging System for Shaky Space Platforms Klaus Janschek, Valerij Tchernykh, Sergeij Dyblenko SMARTSCAN 1 SMARTSCAN Smart Pushbroom Imaging System for Shaky Space Platforms Klaus
SMARTSCAN Smart Pushbroom Imaging System for Shaky Space Platforms Klaus Janschek, Valerij Tchernykh, Sergeij Dyblenko SMARTSCAN 1 SMARTSCAN Smart Pushbroom Imaging System for Shaky Space Platforms Klaus
9/12/2011. Training Course Remote Sensing Basic Theory & Image Processing Methods September 2011
 Training Course Remote Sensing Basic Theory & Image Processing Methods 19 23 September 2011 Remote Sensing Platforms Michiel Damen (September 2011) damen@itc.nl 1 Overview Platforms & missions aerial surveys
Training Course Remote Sensing Basic Theory & Image Processing Methods 19 23 September 2011 Remote Sensing Platforms Michiel Damen (September 2011) damen@itc.nl 1 Overview Platforms & missions aerial surveys
A NOVEL VISION SYSTEM-ON-CHIP FOR EMBEDDED IMAGE ACQUISITION AND PROCESSING
 A NOVEL VISION SYSTEM-ON-CHIP FOR EMBEDDED IMAGE ACQUISITION AND PROCESSING Neuartiges System-on-Chip für die eingebettete Bilderfassung und -verarbeitung Dr. Jens Döge, Head of Image Acquisition and Processing
A NOVEL VISION SYSTEM-ON-CHIP FOR EMBEDDED IMAGE ACQUISITION AND PROCESSING Neuartiges System-on-Chip für die eingebettete Bilderfassung und -verarbeitung Dr. Jens Döge, Head of Image Acquisition and Processing
Development of a 24 GHz Band Peripheral Monitoring Radar
 Special Issue OneF Automotive Technology Development of a 24 GHz Band Peripheral Monitoring Radar Yasushi Aoyagi * In recent years, the safety technology of automobiles has evolved into the collision avoidance
Special Issue OneF Automotive Technology Development of a 24 GHz Band Peripheral Monitoring Radar Yasushi Aoyagi * In recent years, the safety technology of automobiles has evolved into the collision avoidance
INPROX sensors. displacement MLS compact ccd-laser distance sensor
 compact ccd- distance sensor MLS7-250 high vibration and shock resistant -CCD specifications measuring range 250mm resolution >50µm measuring frequency 1000Hz small dimensions (mm) (65x50x20) high shock
compact ccd- distance sensor MLS7-250 high vibration and shock resistant -CCD specifications measuring range 250mm resolution >50µm measuring frequency 1000Hz small dimensions (mm) (65x50x20) high shock
A LATERAL SENSOR FOR THE ALIGNMENT OF TWO FORMATION-FLYING SATELLITES
 A LATERAL SENSOR FOR THE ALIGNMENT OF TWO FORMATION-FLYING SATELLITES S. Roose (1), Y. Stockman (1), Z. Sodnik (2) (1) Centre Spatial de Liège, Belgium (2) European Space Agency - ESA/ESTEC slide 1 Outline
A LATERAL SENSOR FOR THE ALIGNMENT OF TWO FORMATION-FLYING SATELLITES S. Roose (1), Y. Stockman (1), Z. Sodnik (2) (1) Centre Spatial de Liège, Belgium (2) European Space Agency - ESA/ESTEC slide 1 Outline
Technical Datasheet. Blaxtair is an intelligent cameraa with the ability to generate alarms when a pedestrian is detected
 BlaXtair 1 Product Overview Technical Datasheet Figure 1 Blaxtair sensor head Blaxtair is an intelligent cameraa with the ability to generate alarms when a pedestrian is detected in a predefined area.
BlaXtair 1 Product Overview Technical Datasheet Figure 1 Blaxtair sensor head Blaxtair is an intelligent cameraa with the ability to generate alarms when a pedestrian is detected in a predefined area.
Probabilistic Robotics Course. Robots and Sensors Orazio
 Probabilistic Robotics Course Robots and Sensors Orazio Giorgio Grisetti grisetti@dis.uniroma1.it Dept of Computer Control and Management Engineering Sapienza University of Rome Outline Robot Devices Overview
Probabilistic Robotics Course Robots and Sensors Orazio Giorgio Grisetti grisetti@dis.uniroma1.it Dept of Computer Control and Management Engineering Sapienza University of Rome Outline Robot Devices Overview
Systems characteristics of automotive radars operating in the frequency band GHz for intelligent transport systems applications
 Recommendation ITU-R M.257-1 (1/218) Systems characteristics of automotive s operating in the frequency band 76-81 GHz for intelligent transport systems applications M Series Mobile, radiodetermination,
Recommendation ITU-R M.257-1 (1/218) Systems characteristics of automotive s operating in the frequency band 76-81 GHz for intelligent transport systems applications M Series Mobile, radiodetermination,
Automotive In-cabin Sensing Solutions. Nicolas Roux September 19th, 2018
 Automotive In-cabin Sensing Solutions Nicolas Roux September 19th, 2018 Impact of Drowsiness 2 Drowsiness responsible for 20% to 25% of car crashes in Europe (INVS/AFSA) Beyond Drowsiness Driver Distraction
Automotive In-cabin Sensing Solutions Nicolas Roux September 19th, 2018 Impact of Drowsiness 2 Drowsiness responsible for 20% to 25% of car crashes in Europe (INVS/AFSA) Beyond Drowsiness Driver Distraction
PRODUCT OVERVIEW FOR THE. Corona 350 II FLIR SYSTEMS POLYTECH AB
 PRODUCT OVERVIEW FOR THE Corona 350 II FLIR SYSTEMS POLYTECH AB Table of Contents Table of Contents... 1 Introduction... 2 Overview... 2 Purpose... 2 Airborne Data Acquisition and Management Software (ADAMS)...
PRODUCT OVERVIEW FOR THE Corona 350 II FLIR SYSTEMS POLYTECH AB Table of Contents Table of Contents... 1 Introduction... 2 Overview... 2 Purpose... 2 Airborne Data Acquisition and Management Software (ADAMS)...
REPLICATING HUMAN VISION FOR ACCURATE TESTING OF AR/VR DISPLAYS Presented By Eric Eisenberg February 22, 2018
 REPLICATING HUMAN VISION FOR ACCURATE TESTING OF AR/VR DISPLAYS Presented By Eric Eisenberg February 22, 2018 Light & Color Automated Visual Inspection Global Support TODAY S AGENDA Challenges in Near-Eye
REPLICATING HUMAN VISION FOR ACCURATE TESTING OF AR/VR DISPLAYS Presented By Eric Eisenberg February 22, 2018 Light & Color Automated Visual Inspection Global Support TODAY S AGENDA Challenges in Near-Eye
DEFINING A SPARKLE MEASUREMENT STANDARD FOR QUALITY CONTROL OF ANTI-GLARE DISPLAYS Presented By Matt Scholz April 3, 2018
 DEFINING A SPARKLE MEASUREMENT STANDARD FOR QUALITY CONTROL OF ANTI-GLARE DISPLAYS Presented By Matt Scholz April 3, 2018 Light & Color Automated Visual Inspection Global Support TODAY S AGENDA Anti-Glare
DEFINING A SPARKLE MEASUREMENT STANDARD FOR QUALITY CONTROL OF ANTI-GLARE DISPLAYS Presented By Matt Scholz April 3, 2018 Light & Color Automated Visual Inspection Global Support TODAY S AGENDA Anti-Glare
Introduction to Computer Vision
 Introduction to Computer Vision CS / ECE 181B Thursday, April 1, 2004 Course Details HW #0 and HW #1 are available. Course web site http://www.ece.ucsb.edu/~manj/cs181b Syllabus, schedule, lecture notes,
Introduction to Computer Vision CS / ECE 181B Thursday, April 1, 2004 Course Details HW #0 and HW #1 are available. Course web site http://www.ece.ucsb.edu/~manj/cs181b Syllabus, schedule, lecture notes,
A Winning Combination
 A Winning Combination Risk factors Statements in this presentation that refer to future plans and expectations are forward-looking statements that involve a number of risks and uncertainties. Words such
A Winning Combination Risk factors Statements in this presentation that refer to future plans and expectations are forward-looking statements that involve a number of risks and uncertainties. Words such
TECHNICAL DATA OPTIV CLASSIC 432
 TECHNICAL DATA OPTIV CLASSIC 432 Technical Data Product description The Optiv Classic 432 combines optical and tactile measurement in one system (optional touchtrigger probe). The system supports multi-sensor
TECHNICAL DATA OPTIV CLASSIC 432 Technical Data Product description The Optiv Classic 432 combines optical and tactile measurement in one system (optional touchtrigger probe). The system supports multi-sensor
ADAS COMPUTER VISION AND AUGMENTED REALITY SOLUTION
 ENGINEERING ENERGY TELECOM TRAVEL AND AVIATION SOFTWARE FINANCIAL SERVICES ADAS COMPUTER VISION AND AUGMENTED REALITY SOLUTION Sergii Bykov, Technical Lead TECHNOLOGY AUTOMOTIVE Product Vision Road To
ENGINEERING ENERGY TELECOM TRAVEL AND AVIATION SOFTWARE FINANCIAL SERVICES ADAS COMPUTER VISION AND AUGMENTED REALITY SOLUTION Sergii Bykov, Technical Lead TECHNOLOGY AUTOMOTIVE Product Vision Road To
Unit 1: Image Formation
 Unit 1: Image Formation 1. Geometry 2. Optics 3. Photometry 4. Sensor Readings Szeliski 2.1-2.3 & 6.3.5 1 Physical parameters of image formation Geometric Type of projection Camera pose Optical Sensor
Unit 1: Image Formation 1. Geometry 2. Optics 3. Photometry 4. Sensor Readings Szeliski 2.1-2.3 & 6.3.5 1 Physical parameters of image formation Geometric Type of projection Camera pose Optical Sensor
Integration of Inertial Measurements with GNSS -NovAtel SPAN Architecture-
 Integration of Inertial Measurements with GNSS -NovAtel SPAN Architecture- Sandy Kennedy, Jason Hamilton NovAtel Inc., Canada Edgar v. Hinueber imar GmbH, Germany ABSTRACT As a GNSS system manufacturer,
Integration of Inertial Measurements with GNSS -NovAtel SPAN Architecture- Sandy Kennedy, Jason Hamilton NovAtel Inc., Canada Edgar v. Hinueber imar GmbH, Germany ABSTRACT As a GNSS system manufacturer,
Automotive Image Sensors
 Automotive Image Sensors February 1st 2018 Boyd Fowler and Johannes Solhusvik 1 Outline Automotive Image Sensor Market and Applications Viewing Sensors HDR Flicker Mitigation Machine Vision Sensors In
Automotive Image Sensors February 1st 2018 Boyd Fowler and Johannes Solhusvik 1 Outline Automotive Image Sensor Market and Applications Viewing Sensors HDR Flicker Mitigation Machine Vision Sensors In
Range Sensing strategies
 Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
Range Sensing strategies Active range sensors Ultrasound Laser range sensor Slides adopted from Siegwart and Nourbakhsh 4.1.6 Range Sensors (time of flight) (1) Large range distance measurement -> called
Advanced Camera and Image Sensor Technology. Steve Kinney Imaging Professional Camera Link Chairman
 Advanced Camera and Image Sensor Technology Steve Kinney Imaging Professional Camera Link Chairman Content Physical model of a camera Definition of various parameters for EMVA1288 EMVA1288 and image quality
Advanced Camera and Image Sensor Technology Steve Kinney Imaging Professional Camera Link Chairman Content Physical model of a camera Definition of various parameters for EMVA1288 EMVA1288 and image quality
Sensors and Sensing Cameras and Camera Calibration
 Sensors and Sensing Cameras and Camera Calibration Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 20.11.2014
Sensors and Sensing Cameras and Camera Calibration Todor Stoyanov Mobile Robotics and Olfaction Lab Center for Applied Autonomous Sensor Systems Örebro University, Sweden todor.stoyanov@oru.se 20.11.2014
NEOLINE. X-COP 9100s. International Hybrid device DVR with GPS & Radar detector
 NEOLINE X-COP 9100s International Hybrid device DVR with GPS & Radar detector NEOLINE X-COP 9100s Neoline X-COP 9100s is the world s first hybrid with an unique international radar platform for detection
NEOLINE X-COP 9100s International Hybrid device DVR with GPS & Radar detector NEOLINE X-COP 9100s Neoline X-COP 9100s is the world s first hybrid with an unique international radar platform for detection
VisionMap Sensors and Processing Roadmap
 Vilan, Gozes 51 VisionMap Sensors and Processing Roadmap YARON VILAN, ADI GOZES, Tel-Aviv ABSTRACT The A3 is a family of digital aerial mapping cameras and photogrammetric processing systems, which is
Vilan, Gozes 51 VisionMap Sensors and Processing Roadmap YARON VILAN, ADI GOZES, Tel-Aviv ABSTRACT The A3 is a family of digital aerial mapping cameras and photogrammetric processing systems, which is
SPEEDBOX Technical Datasheet
 SPEEDBOX Technical Datasheet Race Technology Limited, 2008 Version 1.1 1. Introduction... 3 1.1. Product Overview... 3 1.2. Applications... 3 1.3. Standard Features... 3 2. Port / Connector details...
SPEEDBOX Technical Datasheet Race Technology Limited, 2008 Version 1.1 1. Introduction... 3 1.1. Product Overview... 3 1.2. Applications... 3 1.3. Standard Features... 3 2. Port / Connector details...
Inertial Systems. Ekinox Series TACTICAL GRADE MEMS. Motion Sensing & Navigation IMU AHRS MRU INS VG
 Ekinox Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.05 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE EKINOX SERIES R&D specialists usually compromise between high
Ekinox Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.05 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE EKINOX SERIES R&D specialists usually compromise between high
Velodyne HDL-64E LIDAR for Unmanned Surface Vehicle Obstacle Detection
 Velodyne HDL-64E LIDAR for Unmanned Surface Vehicle Obstacle Detection Ryan Halterman, Michael Bruch Space and Naval Warfare Systems Center, Pacific ABSTRACT The Velodyne HDL-64E is a 64 laser 3D (360
Velodyne HDL-64E LIDAR for Unmanned Surface Vehicle Obstacle Detection Ryan Halterman, Michael Bruch Space and Naval Warfare Systems Center, Pacific ABSTRACT The Velodyne HDL-64E is a 64 laser 3D (360
CODEVINTEC. Miniature and accurate IMU, AHRS, INS/GNSS Attitude and Heading Reference Systems
 45 27 39.384 N 9 07 30.145 E Miniature and accurate IMU, AHRS, INS/GNSS Attitude and Heading Reference Systems Aerospace Land/Automotive Marine Subsea Miniature inertial sensors 0.1 Ellipse Series New
45 27 39.384 N 9 07 30.145 E Miniature and accurate IMU, AHRS, INS/GNSS Attitude and Heading Reference Systems Aerospace Land/Automotive Marine Subsea Miniature inertial sensors 0.1 Ellipse Series New
Inertial Sensors. Ellipse 2 Series MINIATURE HIGH PERFORMANCE. Navigation, Motion & Heave Sensing IMU AHRS MRU INS VG
 Ellipse 2 Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Ellipse 2 Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
White Paper Thermal: Detection, recognition, and identification
 White Paper Thermal: Detection, recognition, and identification 250.426.8100 www.ascendentgroup.com info@ascendentgroup.com It is important to know just how far your camera can see under ideal conditions.
White Paper Thermal: Detection, recognition, and identification 250.426.8100 www.ascendentgroup.com info@ascendentgroup.com It is important to know just how far your camera can see under ideal conditions.
GNSS in Autonomous Vehicles MM Vision
 GNSS in Autonomous Vehicles MM Vision MM Technology Innovation Automated Driving Technologies (ADT) Evaldo Bruci Context & motivation Within the robotic paradigm Magneti Marelli chose Think & Decision
GNSS in Autonomous Vehicles MM Vision MM Technology Innovation Automated Driving Technologies (ADT) Evaldo Bruci Context & motivation Within the robotic paradigm Magneti Marelli chose Think & Decision
Inertial Sensors. Ellipse 2 Series MINIATURE HIGH PERFORMANCE. Navigation, Motion & Heave Sensing IMU AHRS MRU INS VG
 Ellipse 2 Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Ellipse 2 Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Passive Components around ADAS Applications By Ron Demcko, AVX Fellow, AVX Corporation
 Passive Components around ADAS Applications By Ron Demcko, AVX Fellow, AVX Corporation The importance of high reliability - high performance electronics is accelerating as Advanced Driver Assistance Systems
Passive Components around ADAS Applications By Ron Demcko, AVX Fellow, AVX Corporation The importance of high reliability - high performance electronics is accelerating as Advanced Driver Assistance Systems
Book Cover Recognition Project
 Book Cover Recognition Project Carolina Galleguillos Department of Computer Science University of California San Diego La Jolla, CA 92093-0404 cgallegu@cs.ucsd.edu Abstract The purpose of this project
Book Cover Recognition Project Carolina Galleguillos Department of Computer Science University of California San Diego La Jolla, CA 92093-0404 cgallegu@cs.ucsd.edu Abstract The purpose of this project
Optical basics for machine vision systems. Lars Fermum Chief instructor STEMMER IMAGING GmbH
 Optical basics for machine vision systems Lars Fermum Chief instructor STEMMER IMAGING GmbH www.stemmer-imaging.de AN INTERNATIONAL CONCEPT STEMMER IMAGING customers in UK Germany France Switzerland Sweden
Optical basics for machine vision systems Lars Fermum Chief instructor STEMMER IMAGING GmbH www.stemmer-imaging.de AN INTERNATIONAL CONCEPT STEMMER IMAGING customers in UK Germany France Switzerland Sweden
Leica - 3 rd Generation Airborne Digital Sensors Features / Benefits for Remote Sensing & Environmental Applications
 Leica - 3 rd Generation Airborne Digital Sensors Features / Benefits for Remote Sensing & Environmental Applications Arthur Rohrbach, Sensor Sales Dir Europe, Middle-East and Africa (EMEA) Luzern, Switzerland,
Leica - 3 rd Generation Airborne Digital Sensors Features / Benefits for Remote Sensing & Environmental Applications Arthur Rohrbach, Sensor Sales Dir Europe, Middle-East and Africa (EMEA) Luzern, Switzerland,
High Precision GNSS in Automotive
 High Precision GNSS in Automotive Jonathan Auld, VP Engineering and Safety 6, March, 2018 2 Global OEM Positioning Solutions and Services for Land, Sea, and Air. GNSS in Automotive Today Today the primary
High Precision GNSS in Automotive Jonathan Auld, VP Engineering and Safety 6, March, 2018 2 Global OEM Positioning Solutions and Services for Land, Sea, and Air. GNSS in Automotive Today Today the primary
Image Formation and Capture. Acknowledgment: some figures by B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, and A. Theuwissen
 Image Formation and Capture Acknowledgment: some figures by B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, and A. Theuwissen Image Formation and Capture Real world Optics Sensor Devices Sources of Error
Image Formation and Capture Acknowledgment: some figures by B. Curless, E. Hecht, W.J. Smith, B.K.P. Horn, and A. Theuwissen Image Formation and Capture Real world Optics Sensor Devices Sources of Error
USB components. Multi-Sensor Cameras. Camera Configuration. Available Sensor Board Designs. Options. Base unit and sensor boards
 Multi- Cameras Base unit and sensor boards Up to four pixel-synchronous sensors connected to the base unit by flex-foil cable (LVDS data transfer) Free positioning of the external sensors Plug and play
Multi- Cameras Base unit and sensor boards Up to four pixel-synchronous sensors connected to the base unit by flex-foil cable (LVDS data transfer) Free positioning of the external sensors Plug and play
A 3D Multi-Aperture Image Sensor Architecture
 A 3D Multi-Aperture Image Sensor Architecture Keith Fife, Abbas El Gamal and H.-S. Philip Wong Department of Electrical Engineering Stanford University Outline Multi-Aperture system overview Sensor architecture
A 3D Multi-Aperture Image Sensor Architecture Keith Fife, Abbas El Gamal and H.-S. Philip Wong Department of Electrical Engineering Stanford University Outline Multi-Aperture system overview Sensor architecture
Inertial Sensors. Ellipse Series MINIATURE HIGH PERFORMANCE. Navigation, Motion & Heave Sensing IMU AHRS MRU INS VG
 Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Ellipse Series MINIATURE HIGH PERFORMANCE Inertial Sensors IMU AHRS MRU INS VG ITAR Free 0.1 RMS Navigation, Motion & Heave Sensing ELLIPSE SERIES sets up new standard for miniature and cost-effective
Specifications for Fujifilm FinePix F850EXR 16MP Digital Camera
 Specifications for Fujifilm FinePix F850EXR 16MP Digital Camera Model name FinePix F850EXR Number of effective pixels 16.0 million pixels Image sensor 1/2-inch EXR CMOS with primary color filter Storage
Specifications for Fujifilm FinePix F850EXR 16MP Digital Camera Model name FinePix F850EXR Number of effective pixels 16.0 million pixels Image sensor 1/2-inch EXR CMOS with primary color filter Storage
University Of Lübeck ISNM Presented by: Omar A. Hanoun
 University Of Lübeck ISNM 12.11.2003 Presented by: Omar A. Hanoun What Is CCD? Image Sensor: solid-state device used in digital cameras to capture and store an image. Photosites: photosensitive diodes
University Of Lübeck ISNM 12.11.2003 Presented by: Omar A. Hanoun What Is CCD? Image Sensor: solid-state device used in digital cameras to capture and store an image. Photosites: photosensitive diodes
Vehicle Level Antenna Pattern & ADAS Measurement
 www.scvemc.org Vehicle Level Antenna Pattern & ADAS Measurement Presenter Garth D Abreu Director Automotive Solutions ETS-Lindgren garth.dabreu@ets-lindgren.com +1 512 531 6438 Today s complexity. 2 Automotive
www.scvemc.org Vehicle Level Antenna Pattern & ADAS Measurement Presenter Garth D Abreu Director Automotive Solutions ETS-Lindgren garth.dabreu@ets-lindgren.com +1 512 531 6438 Today s complexity. 2 Automotive
Building a Real Camera. Slides Credit: Svetlana Lazebnik
 Building a Real Camera Slides Credit: Svetlana Lazebnik Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible?
Building a Real Camera Slides Credit: Svetlana Lazebnik Home-made pinhole camera Slide by A. Efros http://www.debevec.org/pinhole/ Shrinking the aperture Why not make the aperture as small as possible?
NOVA S12. Compact and versatile high performance camera system. 1-Megapixel CMOS Image Sensor: 1024 x 1024 pixels at 12,800fps
 NOVA S12 1-Megapixel CMOS Image Sensor: 1024 x 1024 pixels at 12,800fps Maximum Frame Rate: 1,000,000fps Class Leading Light Sensitivity: ISO 12232 Ssat Standard ISO 64,000 monochrome ISO 16,000 color
NOVA S12 1-Megapixel CMOS Image Sensor: 1024 x 1024 pixels at 12,800fps Maximum Frame Rate: 1,000,000fps Class Leading Light Sensitivity: ISO 12232 Ssat Standard ISO 64,000 monochrome ISO 16,000 color
Invited talk IET-Renault Workshop Autonomous Vehicles: From theory to full scale applications Novotel Paris Les Halles, June 18 th 2015
 Risk assessment & Decision-making for safe Vehicle Navigation under Uncertainty Christian LAUGIER, First class Research Director at Inria http://emotion.inrialpes.fr/laugier Contributions from Mathias
Risk assessment & Decision-making for safe Vehicle Navigation under Uncertainty Christian LAUGIER, First class Research Director at Inria http://emotion.inrialpes.fr/laugier Contributions from Mathias