Fusion in EU projects and the Perception Approach. Dr. Angelos Amditis interactive Summer School 4-6 July, 2012
|
|
|
- Megan Clarke
- 6 years ago
- Views:
Transcription


1 Fusion in EU projects and the Perception Approach Dr. Angelos Amditis interactive Summer School 4-6 July, 2012
2 Content Introduction Data fusion in european research projects EUCLIDE PReVENT-PF2 SAFESPOT HAVEit interactive Lessons learned Open research issues Conclusions 2
3 Introduction Data fusion central role in current & future ITS Stand alone sensors not sufficient (physical limitations) Fusion of information from heterogeneous sources Perception sensors: radars, cameras, laserscanners etc. Digital maps Wireless communication (V2X) Fusion evolvement through European projects EUCLIDE PReVENT ProFusion2 SAFESPOT HAVEit interactive 3



4 EUCLIDE COMPETITIVE and SUSTAINABLE GROWTH PROGRAMME 9 partners from industry & academia Enhanced human machine interface for on vehicle integrated driving support system Development of an on-vehicle warning system in order to support the driver in avoiding collision under reduced visibility conditions and in several traffic scenarios Two different sensors used to enhance system performance far infrared camera microwave radar 4
5 EUCLIDE Innovation One of the first multi-sensor data fusion systems in automotive safety (facing the shortcomings of single sensor projects like DARWIN and AWARE) Integration of Far infrared sensor with radar sensor offering a detailed representation of the vehicle environment able to operate under almost every weather condition Enhanced situation awareness due to combination of information from two completely different sensors Threat assessment was implemented using dynamic models for the prediction of the future position of the ego vehicle and of other detected objects Optimum HMI integration keeping drivers workload low 5
6 EUCLIDE Data fusion architecture Fusion of data generated from an infrared camera and a radar sensor (Kalman filters, weighted arithmetic mean method) Deal with the tracking of multiple targets Sensing time Prediction 6 unknown objects new tracks IR objects scene Radar objects Fusion Track to Tr Fusion rack Devaluation / Deleting Sensor Assignment known objects known objects - RADAR Fusion (Collection) Sensor - IR-Camera Track initialisation Classification Gating to existing (known) tracks or to the set of unknown objects Tracks Alignment Association
7 EUCLIDE Gating, association & track management Fuzzy gating instead of probabilistic gating Probabilistic Gating Fuzzy Gating Data association based on Multi Hypothesis Assignment 1 H1 p1 measurements Reducing false alarms while keeping short reaction delays of the automatic warning system (smart track management) Existing Track H2 H3 H4 H5 H6 p2 p3 p4 p5 p6 hypotheses H7 p7 Initialisation Deleting 7

 If two tracks are recognized as near enough according to the position-, dynamic- and feature distance they are fused with a weighted")
8 EUCLIDE Track to track fusion More than one tracks can be initialised by one physical object (splitting of detections) These two or more tracks belonging to that one physical object must be first recognized as tracks of one physical object and then fused This can be done on the basis of estimated parameters as the dynamic parameters (i.e. velocity, acceleration, other significant features etc.) If two tracks are recognized as near enough according to the position-, dynamic- and feature distance they are fused with a weighted arithmetic mean method 8


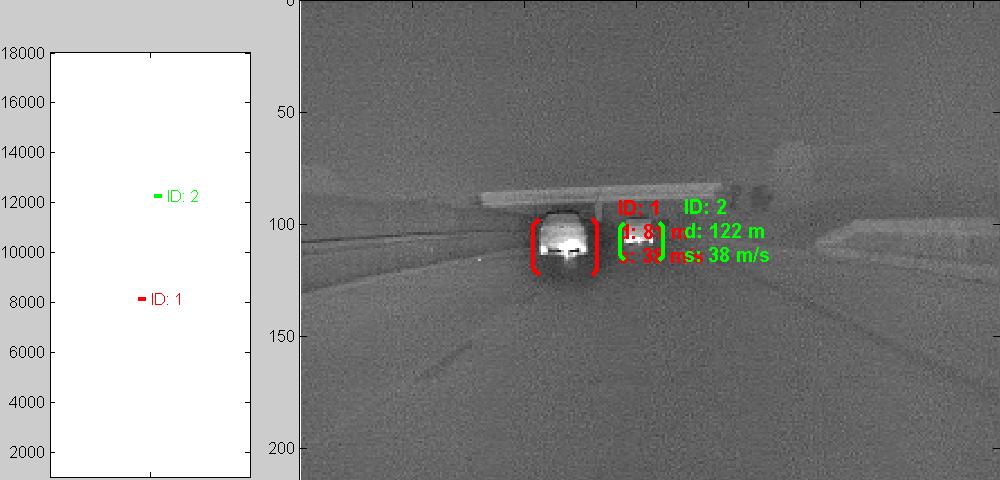
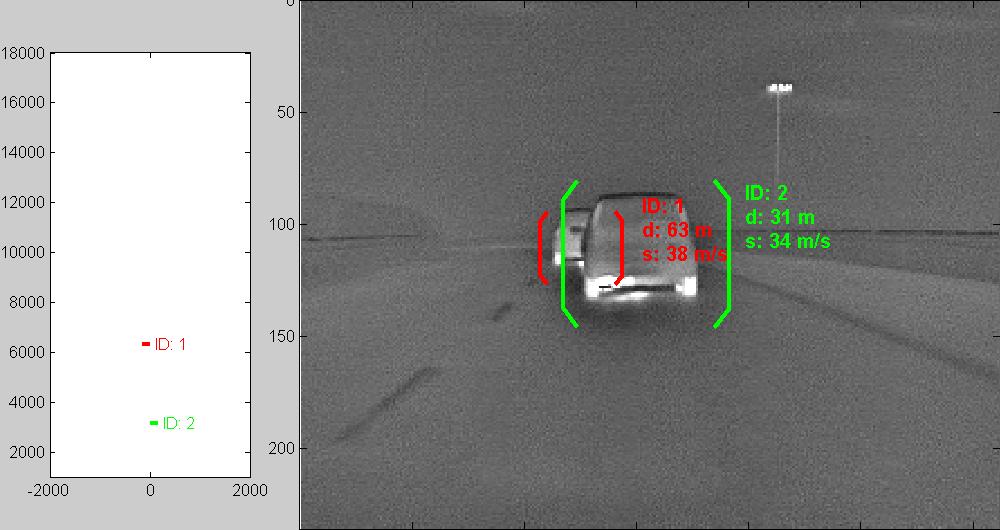

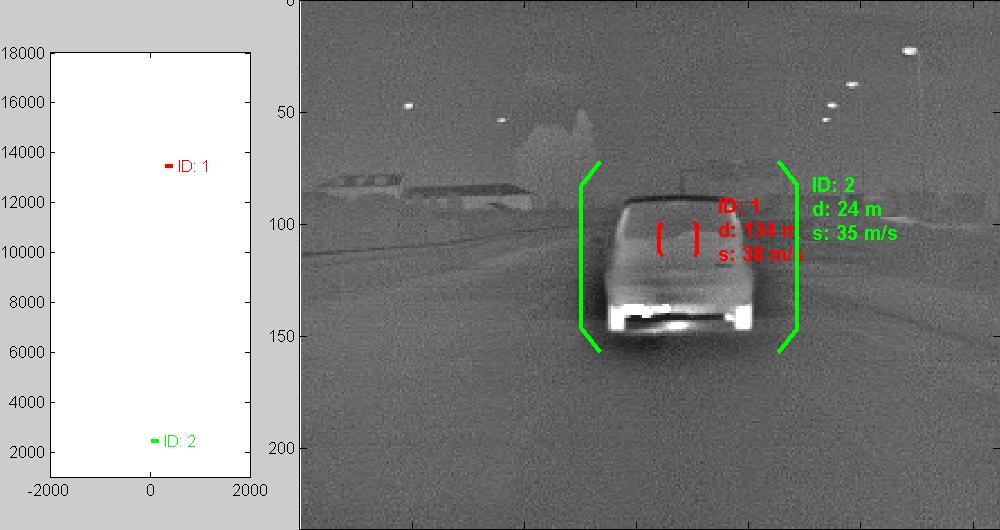
9 EUCLIDE Results using real data Overtaking scenarios with two vehicles 9
10 EUCLIDE Lessons learned Sensors used were expensive and unsuitable for integration and exploitation in commercial automobiles Sensor coverage was limited; EUCLIDE system dealt with frontal area only Data Fusion algorithms were adapted only for the limited case of this specific system; they were not generic adaptable to other architectures and sensors topologies The performance of the military radar was outstanding (incl. also an internal algorithm for detecting road borders) However, the radar faced some problems with ghost effects For a random specific target it detected also a mirrored version of this target 10


11 PReVENT ProFusion2 Integrated Project co-funded by the European Commission (FP6) 54 partners from industry & academia / research Contribution to road safety Development and demonstration of preventive safety applications and technologies ProFusion2 SP Focus on sensor data fusion Different fusion approaches Several demonstrators 11
12 ProFusion2 Innovation The first systematic attempt to introduce data fusion research in automotive European projects Development of different fusion approaches Proposal of Sensor Data Fusion (SDF) framework and functional architecture First attempt to take into account wireless communications in cars (WILLWARN) using WiFi technology Test and evaluation using several different demonstrators running different applications Close cooperation between PF2 and vertical SPs 12
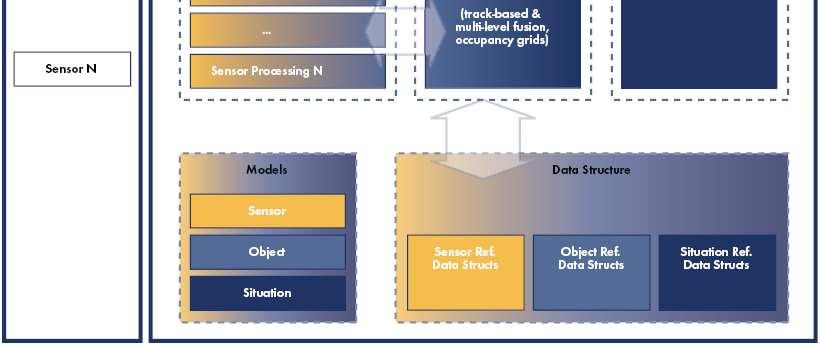
13 ProFusion2 SDF framework 13
 model Object Refinement level Situation")
14 ProFusion2 Functional model Based on Joint Directors of Laboratories (JDL) model Object Refinement level Situation Refinement level 14


15 ProFusion2 Fusion approaches (1) Four different fusion approaches Early Fusion (FORWISS) use of slightly pre-processed data processing of all data from different sensors as a whole exploitation of redundant sensor information on a lower level Multi-level Fusion (TUC) fuse data of multiple sensors on multiple levels covers the sensor data level up to the situation level high-level to low-level and/or vice versa signal flow directions 15
 Track Lev")

16 ProFusion2 Fusion approaches (2) Track Level Fusion & Situation Refinement (ICCS) one level of processing (i.e. tracking) is carried out inside each sensor track arrays feed the track level fusion algorithm situation analysis included (e.g. path prediction, maneuver detection, driver intention etc.) Grid Based Fusion (INRIA) occupancy grid framework map the surrounding environment of the vehicle and perform perception in this occupancy grid the grid is built using all the data available at a given time 16

17 ProFusion2 Demonstrators 17
18 ProFusion2 Lessons learned Difficult to automate the perception process Some sensors are designed for frontal applications and when used in rear ones false alarms or missed targets was the result Sensor mounting and definition of sensor interfaces are crucial issues A lot of space is needed for the fusion processing units Image processing is a demanding task (significant processing power is needed) 18



19 ProFusion2 Conclusions Each fusion approach has its pros and cons in terms of processing power, ease of adaptation in different demo cars etc. Several SPs (SAFELANE, INSAFES, SASPENCE etc.) where data fusion tested and validated All approaches showed good performance Deficiencies highlighted and addressed in successor projects (e.g. HAVEit, interactive) 19


20 SAFESPOT Integrated Project co-funded by the European Commission (FP6) 53 partners from industry & academia Cooperative applications for enhancing road safety Road accidents prevention via a SAFETY MARGIN ASSISTANT to detect in advance potentially dangerous situations and extend, in space and time, drivers awareness of the surroundings 20
21 SAFESPOT Innovation SAFESPOT used PF2 SDF functional model (Situation Refinement SR, Object Refinement OR) and the experience gained in PReVENT Incorporation of cooperative data fusion techniques Wireless communications using p technology Close cooperation with CVIS based on CALM5 Cooperative Pre-Data fusion laserscanner-based Advanced situation awareness (SR algorithms) of the vehicular environment (incl. traffic estimation, fog detection etc.) 21
22 SAFESPOT Scenario 22

23 SAFESPOT Fusion in Cooperative Systems Vehicle-to-X communication and data fusion techniques make the core of the system. Sensor data fusion systems are employed, to get an improved picture of the host vehicle s surrounding. Research findings include a data fusion structure and architecture, tracking methods as well as vehicle and road models and related parameter estimation. 23

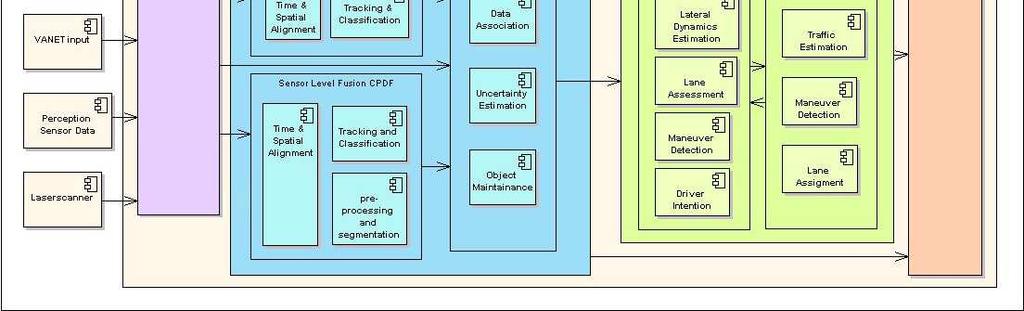
24 SAFESPOT Fusion Architecture 24
 Temporal and spatial alignment")
 25")
25 SAFESPOT Main Data Fusion blocks Co-operative pre data fusion (IBEO) Laserscanner-based fusion module Objects detection in host vehicle s vicinity V2V data association Object refinement (CRF) Temporal and spatial alignment Uncertainty estimation & object maintenance Central level fusion approach Situation Refinement (ICCS) Future path estimation Maneuver detection Assignment of objects to lanes Detection of high level events (i.e. fog, traffic) 25
 Tunnel Landmarks for referencing Map from provider Fog bank Accident (just occurred)")
26 SAFESPOT Local Dynamic Map Aim: to represent the vehicle s surroundings with all static and dynamic safety-relevant elements Output of cooperative sensing/processing Temporary regional info! Vehicles in queue Signalling phases Ego Vehicle speed, position, status, etc Slippery road surface (ice) Tunnel Landmarks for referencing Map from provider Fog bank Accident (just occurred) 26
27 SAFESPOT In-vehicle HW architecture Firewire L1/L2-GPS (RS232) Ethernet 10/100BASE-T ENP network (e.g. CAN) Powertrain/body networks (CAN) Positioning PC OEM (optional, sensor PCB plugged in) Gateway Ethernet Switch Applications PC (optional) VANET Router (WLAN card plugged in) L1-GPS (RS232, NMEA, PPS) CPDF* PC ESPOSYTOR Laserscanner (Arcnet) *CPDF: co-operative pre-data fusion Main PC (DF, LDM, MM, opt. Appl) 27

 for safety related applications need more investigation")
28 SAFESPOT Lessons learned More research is needed for handling delayed information received from the wireless medium Further investigation is needed for cooperative tracking and data association Synchronization of vehicles-nodes of the VANET is not trivial and critical for the fusion process The creation and the management of a database (LDM) for safety related applications need more investigation and customization 28




29 SAFESPOT Conclusions The data fusion functional model adopted from PReVENT Results showed a good performance of cooperative fusion Cooperative Data Fusion challenging Wireless communication enhances road safety Validation of results in different test sites and in different demonstrators 29
30 HAVEit Integrated Project co-funded by the European Commission (FP7) 23 partners from industry & academia Highly automated driving Real-time perception requirements Multi sensor platforms Scalable architecture Different kind of applications: Safety enhancement o Driver overload o Driver underload Energy optimization and emission reduction 30

31 HAVEit Innovation Hard real-time perception algorithms (highly automated vehicles) Fusion of the individual sensor data into a unified perception output Improved estimation accuracy and robustness Development of generic fusion modules Use of common interfaces 31
32 HAVEit Joint System & Data fusion Driver interface components Driver monitoring Driver Environment sensors Vehicle sensors Sensor data fusion Perception layer Command layer Driver states HMI assessment Mode selection unit Co-Pilot joint sy ystem automation level Command generation and plausiblization motion control vector Drivetrain control Execution layer Steering actuator Braking actuator Engine actuator Gearbox actuator 32
33 HAVEit Data fusion overview Perception layer Ego vehicle state Kinematic Relative to the road Road Environment Lanes Objects Additional information The Generic data fusion concept 2 levels of processing hierarchy Implementation of the same algorithms for different demos Implementation of SW modules applicable to many HW platforms 33

34 HAVEit Data fusion architecture 34





35 HAVEit Tracking architecture Laser Scanner Camera Short Range Radars Driver monitoring Camera 2 Levels of tracking Sensor Level Central Level 35
36 HAVEit Sensor level tracking Association of consecutive sensor observations of the same targets into tracks Sensor-Level preprocessing Local Tracker Signal Processing Association Track Update Tracks Gate Computation Track Management 36
37 HAVEit Tracking and state update Gate Calculation Measurement to track assignment using auction algorithm Track confirmation and deletion is done using hit and miss based rules Track state update is done using the standard Kalman filter 37
38 HAVEit Central level tracking Identify local tracks that represent the same object Fuse local track estimates Track ID maintenance in track transitions between sensor FOVs Local Tracks Global Tracker Tracks Tracks Track to Track Association Track fusion and Prediction Track Maintenance (Initiation, Confirmation and Deletion) Gating Computations Global Tracks 38
39 HAVEit Track fusion Takes as input the track lists of the local trackers and gives a single track list in the output. The track-to-track association module identifies which tracks from different tracks list represent the same object. The Mahalanobis distance of the two tracks (x i, x j ) is calculated as follows: 2 ~ ij x ~ ~ 1 = ij ( ) 1 Pi + Pj Pij P ij xij = x ij Sij xij d ~ The fused estimate of the two independent estimates is ~ ~ x ~ ~ ~ 1 = i+ ( )( ) 1( ) Pi Pij Pi + Pj Pij Pji x j xi = x ijsij xij x ~ i j 39
40 HAVEit Lane estimation Lane geometry Clothoid model Kalman filtering Lane description Curv Curv yoffs head width rate l 2 c1τ y( l) = y0 + sin( coτ + ) dτ 2 y 0 ( x) = y + tan( h) 0 x+ c 0 2 x 2 + c l 2 c1τ x( l) = cos( coτ + ) dτ 2 1 x Lane estimation is based on the camera sensor (proved to be more reliable) Lane estimation based on laserscanner measurements was used as a back-up solution 40

41 HAVEit Lessons learned Further investigation is needed for taking into account cooperative tracking and data association in highly automated driving More research is needed for handling delayed information received from the wireless medium Development of generic perception modules with well defined interfaces will be the challenge for future in-vehicle perception platforms Miniature and low cost sensors will support the deployment of automated vehicles since many sensors are required for reliable and accurate perception 41
 Active intervention poses hard real-time requirements Different kind of applications: Continuous driver support Collision avoidance Collision mitigation")
42 interactive Integrated Project co-funded by the European Commission (FP7) 29 partners from industry & academia Integration of different applications Holistic environment perception (ADASIS v2, V2X) Perception SP has central role (ICCS, DELPHI) Active intervention poses hard real-time requirements Different kind of applications: Continuous driver support Collision avoidance Collision mitigation 42

43 interactive Innovation Based on PReVENT/PF2, SAFESPOT & HAVEit experience (common key partners) General interfaces for different sensor groups to minimize effort in the next levels of processing Reference perception platform implementation Closer to the plug & play approach Applicable to different demos and applications with minor adaptation Integration of different safety related applications 43


44 interactive JDL model for safety apps The PReVENT/PF2 proposal is followed here also 44
45 interactive System architecture Sensor layer: vehicle sensors, GPS, camera, lidar, radar, ultrasonic, digital maps, V2X Perception layer: perception platform, perception modules Application layer: development of functions for building applications Information Warning & Intervention (IWI) layer: human machine interface (HMI) incl. visual, audible & haptic signals, functions to optimize this interaction (active intervention) Sensors Object information Threat assessment Information / warning Information sources Road information Warning manager Active braking / steering Sensor layer Perception layer Application layer IWI layer 45
46 interactive Perception layer Perception will advance the multi-sensor approaches Focus on sensor data fusion processes A common perception framework for multiple safety applications Unified output interface from the perception layer to the application layer will be developed Integration of different information sources sensors, digital maps, communications Multiple integrated functions and active interventions Development of an innovative model and platform for enhancing the perception of the traffic situation in the vicinity of the vehicle 46



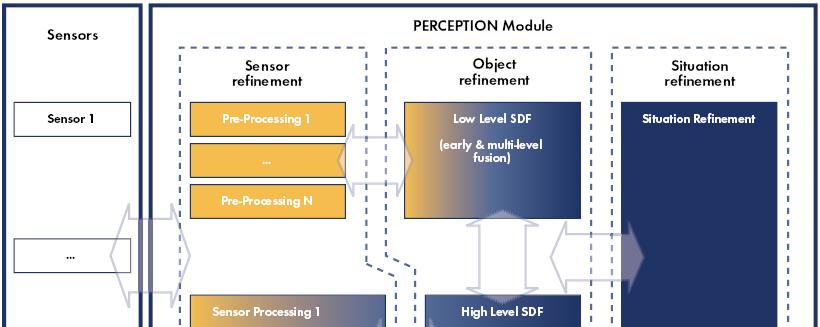
47 interactive Perception platform (1/2) Reference implementation Common interface structure for every sensor type or information source Different sensor types and products attached based on the plug-in concept Development of a variety of perception modules, e.g. object perception & classification lane detection & road geometry extraction Output: Perception Horizon 47
48 interactive Perception platform (2/2) PERCEPTION PLATFORM Road Data Fusion EVRP-ToRoad Digital Map GPS ADASIS v2 Horizon Provider Enhanced Vehicle Positioning Vehicle State Filter Road Edge Detection Odometer Gyroscope Frontal Object Perception Assignment of Objects-Lanes Vehicle sensors Camera Side/Rear Object Perception Vehicle Trajectory Calculation CAN line (to application PC) Lidar Lane Recognition Moving Object Classification Radar Frontal Near Range Perception Free Space Detection Ultrasonic V2X Nodes Temperature /Rain sensor Recognition Unavoidable Crash VRUs Detection EVRP: Ego Vehicle Relative Position VRU: Vulnerable Road User V2X: Vehicle to Vehicle or Vehicle to Infrastructure 48
49 interactive Perception modules Vehicle State Filter ADASIS Horizon Recognition of Unavoidable Crash Situations Frontal Near Range Perception Frontal Object Perception Side/Rear Object Perception Lane Recognition Road Edge Detection Road Data Fusion Enhanced Vehicle Positioning Relative Positioning to the Road of the Ego Vehicle Assignment of Objects to Lanes Vehicle Trajectory Calculation Moving Object Classification Detection of Free Space Vulnerable Road Users 49
 position, velocity, acceleration")

50 interactive Frontal object perception Detection of objects in the front area of the ego vehicle Stationary & moving objects Relevant information identity (ID) position, velocity, acceleration confidence value static/moving flag moving direction estimated object size Sensor data fusion & advanced filtering techniques reliable object perception additional information not directly observed from a sensor 50
51 interactive Perception Horizon (PH) Output interface of the perception platform Union of the following three elements: Synchronized subset of the perception modules outputs Configuration files for each demonstrator vehicle (available sensors, mounting position etc.) Output manager functionality (software module translating Perception Horizon data to the communication line between perception platform and applications) Modular handling of data Avoiding duplicate structures Minimization of passing through information 51
")
52 interactive Advanced future research Processing / Fusion algorithms (maps, radar, lidar, camera): Laser reliable motorcicle Multi-sensor tracking in sensor networks Vision reliable no reliable car truck bike pedestrian Maintenance of Track rear-side-frontal no reliable Instantaneous fusion using Evidential occupancy grids (degrees of belief for detection, tracking and classification) Efficient object classifier for pedestrian, cars and trucks Robust Road Boundary Detection + Advanced Lane Tracking Frontal Near Range Perception for collision avoidance 52
53 interactive Lessons learned so far The research work performed in previous EU projects and the gained experience were an important asset Reference perception platform close to the plug & play concept is feasible Interoperability of the perception platform in different demonstrator vehicles was shown The time synchronization and in-time data exchange among a significant number of perception modules within the perception s platform framework is a challenging task The definition of the interfaces among the different layers (sensor, perception, application and IWI) of the system proved to be a nontrivial task The use of wireless communication for perception was limited, so further investigation is needed in the future 53
54 Open research issues in data fusion Robust sensors are needed (no perfect sensors available) Fusion of heterogeneous information from different sources (images, radar/lidar measurements, wireless messages etc.) Calculation and usage of uncertainty values (non- standard method for selecting the best method) Except for object and situation refinement other levels of the JDL model need further research (e.g. process refinement) Future approaches should focus on human-centric analysis and improvements (include human in the data fusion loop) 54
55 Conclusions Important role of data fusion in automotive applications Perception of automotive environment (highly dynamic) difficult and challenging task The development and the experience in European research projects was outlined PReVENT/PF2 functional architecture adopted Cooperative systems pose several challenges Integration of different applications in interactive exploiting advanced fusion techniques Generic perception platform with well defined I/O interfaces Central fusion architectures are more suitable for generic perception modules and platform development 55



56 Thank you. Dr. Angelos Amditis Research ICCS a.amditis@iccs.gr phone:
interactive IP: Perception platform and modules
 interactive IP: Perception platform and modules Angelos Amditis, ICCS 19 th ITS-WC-SIS76: Advanced integrated safety applications based on enhanced perception, active interventions and new advanced sensors
interactive IP: Perception platform and modules Angelos Amditis, ICCS 19 th ITS-WC-SIS76: Advanced integrated safety applications based on enhanced perception, active interventions and new advanced sensors
SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results
 SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results Angelos Amditis (ICCS) and Lali Ghosh (DEL) 18 th October 2013 20 th ITS World
SIS63-Building the Future-Advanced Integrated Safety Applications: interactive Perception platform and fusion modules results Angelos Amditis (ICCS) and Lali Ghosh (DEL) 18 th October 2013 20 th ITS World
Perception platform and fusion modules results. Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event
 Perception platform and fusion modules results Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event 20 th -21 st November 2013 Agenda Introduction Environment Perception in Intelligent Transport
Perception platform and fusion modules results Angelos Amditis - ICCS and Lali Ghosh - DEL interactive final event 20 th -21 st November 2013 Agenda Introduction Environment Perception in Intelligent Transport
Deliverable D1.6 Initial System Specifications Executive Summary
 Deliverable D1.6 Initial System Specifications Executive Summary Version 1.0 Dissemination Project Coordination RE Ford Research and Advanced Engineering Europe Due Date 31.10.2010 Version Date 09.02.2011
Deliverable D1.6 Initial System Specifications Executive Summary Version 1.0 Dissemination Project Coordination RE Ford Research and Advanced Engineering Europe Due Date 31.10.2010 Version Date 09.02.2011
Final Report Non Hit Car And Truck
 Final Report Non Hit Car And Truck 2010-2013 Project within Vehicle and Traffic Safety Author: Anders Almevad Date 2014-03-17 Content 1. Executive summary... 3 2. Background... 3. Objective... 4. Project
Final Report Non Hit Car And Truck 2010-2013 Project within Vehicle and Traffic Safety Author: Anders Almevad Date 2014-03-17 Content 1. Executive summary... 3 2. Background... 3. Objective... 4. Project
HAVEit Highly Automated Vehicles for Intelligent Transport
 HAVEit Highly Automated Vehicles for Intelligent Transport Holger Zeng Project Manager CONTINENTAL AUTOMOTIVE HAVEit General Information Project full title: Highly Automated Vehicles for Intelligent Transport
HAVEit Highly Automated Vehicles for Intelligent Transport Holger Zeng Project Manager CONTINENTAL AUTOMOTIVE HAVEit General Information Project full title: Highly Automated Vehicles for Intelligent Transport
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS. Sergii Bykov Technical Lead Machine Learning 12 Oct 2017
 23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
23270: AUGMENTED REALITY FOR NAVIGATION AND INFORMATIONAL ADAS Sergii Bykov Technical Lead Machine Learning 12 Oct 2017 Product Vision Company Introduction Apostera GmbH with headquarter in Munich, was
Choosing the Optimum Mix of Sensors for Driver Assistance and Autonomous Vehicles
 Choosing the Optimum Mix of Sensors for Driver Assistance and Autonomous Vehicles Ali Osman Ors May 2, 2017 Copyright 2017 NXP Semiconductors 1 Sensing Technology Comparison Rating: H = High, M=Medium,
Choosing the Optimum Mix of Sensors for Driver Assistance and Autonomous Vehicles Ali Osman Ors May 2, 2017 Copyright 2017 NXP Semiconductors 1 Sensing Technology Comparison Rating: H = High, M=Medium,
HUMAN FACTORS IN VEHICLE AUTOMATION
 Emma Johansson HUMAN FACTORS IN VEHICLE AUTOMATION - Activities in the European project AdaptIVe Vehicle and Road Automation (VRA) Webinar 10 October 2014 // Outline AdaptIVe short overview Collaborative
Emma Johansson HUMAN FACTORS IN VEHICLE AUTOMATION - Activities in the European project AdaptIVe Vehicle and Road Automation (VRA) Webinar 10 October 2014 // Outline AdaptIVe short overview Collaborative
Combining ROS and AI for fail-operational automated driving
 Combining ROS and AI for fail-operational automated driving Prof. Dr. Daniel Watzenig Virtual Vehicle Research Center, Graz, Austria and Institute of Automation and Control at Graz University of Technology
Combining ROS and AI for fail-operational automated driving Prof. Dr. Daniel Watzenig Virtual Vehicle Research Center, Graz, Austria and Institute of Automation and Control at Graz University of Technology
Invited talk IET-Renault Workshop Autonomous Vehicles: From theory to full scale applications Novotel Paris Les Halles, June 18 th 2015
 Risk assessment & Decision-making for safe Vehicle Navigation under Uncertainty Christian LAUGIER, First class Research Director at Inria http://emotion.inrialpes.fr/laugier Contributions from Mathias
Risk assessment & Decision-making for safe Vehicle Navigation under Uncertainty Christian LAUGIER, First class Research Director at Inria http://emotion.inrialpes.fr/laugier Contributions from Mathias
SAfety VEhicles using adaptive Interface Technology (SAVE-IT): A Program Overview
: A Program Overview") SAfety VEhicles using adaptive Interface Technology (SAVE-IT): A Program Overview SAVE-IT David W. Eby,, PhD University of Michigan Transportation Research Institute International Distracted Driving Conference
SAfety VEhicles using adaptive Interface Technology (SAVE-IT): A Program Overview SAVE-IT David W. Eby,, PhD University of Michigan Transportation Research Institute International Distracted Driving Conference
Honda R&D Americas, Inc.
 Honda R&D Americas, Inc. Topics Honda s view on ITS and V2X Activity Honda-lead V2I Message Set Development Status Challenges Topics Honda s view on ITS and V2X Activity Honda-lead V2I Message Set Standard
Honda R&D Americas, Inc. Topics Honda s view on ITS and V2X Activity Honda-lead V2I Message Set Development Status Challenges Topics Honda s view on ITS and V2X Activity Honda-lead V2I Message Set Standard
Tsuyoshi Sato PIONEER CORPORATION July 6, 2017
 Technology R&D for for Highly Highly Automated Automated Driving Driving Tsuyoshi Sato PIONEER CORPORATION July 6, 2017 Agenda Introduction Overview Architecture R&D for Highly Automated Driving Hardware
Technology R&D for for Highly Highly Automated Automated Driving Driving Tsuyoshi Sato PIONEER CORPORATION July 6, 2017 Agenda Introduction Overview Architecture R&D for Highly Automated Driving Hardware
Traffic Management for Smart Cities TNK115 SMART CITIES
 Traffic Management for Smart Cities TNK115 SMART CITIES DAVID GUNDLEGÅRD DIVISION OF COMMUNICATION AND TRANSPORT SYSTEMS Outline Introduction Traffic sensors Traffic models Frameworks Information VS Control
Traffic Management for Smart Cities TNK115 SMART CITIES DAVID GUNDLEGÅRD DIVISION OF COMMUNICATION AND TRANSPORT SYSTEMS Outline Introduction Traffic sensors Traffic models Frameworks Information VS Control
Development of a 24 GHz Band Peripheral Monitoring Radar
 Special Issue OneF Automotive Technology Development of a 24 GHz Band Peripheral Monitoring Radar Yasushi Aoyagi * In recent years, the safety technology of automobiles has evolved into the collision avoidance
Special Issue OneF Automotive Technology Development of a 24 GHz Band Peripheral Monitoring Radar Yasushi Aoyagi * In recent years, the safety technology of automobiles has evolved into the collision avoidance
Intelligent driving TH« TNO I Innovation for live
 Intelligent driving TNO I Innovation for live TH«Intelligent Transport Systems have become an integral part of the world. In addition to the current ITS systems, intelligent vehicles can make a significant
Intelligent driving TNO I Innovation for live TH«Intelligent Transport Systems have become an integral part of the world. In addition to the current ITS systems, intelligent vehicles can make a significant
Interaction in Urban Traffic Insights into an Observation of Pedestrian-Vehicle Encounters
 Interaction in Urban Traffic Insights into an Observation of Pedestrian-Vehicle Encounters André Dietrich, Chair of Ergonomics, TUM andre.dietrich@tum.de CARTRE and SCOUT are funded by Monday, May the
Interaction in Urban Traffic Insights into an Observation of Pedestrian-Vehicle Encounters André Dietrich, Chair of Ergonomics, TUM andre.dietrich@tum.de CARTRE and SCOUT are funded by Monday, May the
Volkswagen Group: Leveraging VIRES VTD to Design a Cooperative Driver Assistance System
 Volkswagen Group: Leveraging VIRES VTD to Design a Cooperative Driver Assistance System By Dr. Kai Franke, Development Online Driver Assistance Systems, Volkswagen AG 10 Engineering Reality Magazine A
Volkswagen Group: Leveraging VIRES VTD to Design a Cooperative Driver Assistance System By Dr. Kai Franke, Development Online Driver Assistance Systems, Volkswagen AG 10 Engineering Reality Magazine A
Using FMI/ SSP for Development of Autonomous Driving
 Using FMI/ SSP for Development of Autonomous Driving presented by Jochen Köhler (ZF) FMI User Meeting 15.05.2017 Prague / Czech Republic H.M. Heinkel S.Rude P. R. Mai J. Köhler M. Rühl / A. Pillekeit Motivation
Using FMI/ SSP for Development of Autonomous Driving presented by Jochen Köhler (ZF) FMI User Meeting 15.05.2017 Prague / Czech Republic H.M. Heinkel S.Rude P. R. Mai J. Köhler M. Rühl / A. Pillekeit Motivation
Positioning Challenges in Cooperative Vehicular Safety Systems
 Positioning Challenges in Cooperative Vehicular Safety Systems Dr. Luca Delgrossi Mercedes-Benz Research & Development North America, Inc. October 15, 2009 Positioning for Automotive Navigation Personal
Positioning Challenges in Cooperative Vehicular Safety Systems Dr. Luca Delgrossi Mercedes-Benz Research & Development North America, Inc. October 15, 2009 Positioning for Automotive Navigation Personal
A Winning Combination
 A Winning Combination Risk factors Statements in this presentation that refer to future plans and expectations are forward-looking statements that involve a number of risks and uncertainties. Words such
A Winning Combination Risk factors Statements in this presentation that refer to future plans and expectations are forward-looking statements that involve a number of risks and uncertainties. Words such
GNSS in Autonomous Vehicles MM Vision
 GNSS in Autonomous Vehicles MM Vision MM Technology Innovation Automated Driving Technologies (ADT) Evaldo Bruci Context & motivation Within the robotic paradigm Magneti Marelli chose Think & Decision
GNSS in Autonomous Vehicles MM Vision MM Technology Innovation Automated Driving Technologies (ADT) Evaldo Bruci Context & motivation Within the robotic paradigm Magneti Marelli chose Think & Decision
Séminaire Voiture Autonome: Technologies, Enjeux et Applications February , Paris (France) Asprom UIMM Cap Tronic
 Asprom UIMM Cap Tronic") Embedded Perception & Risk Assessment for next Cars Generation Christian LAUGIER, Research Director at Inria Chroma Team & IRT Nanolec Christian.laugier@inria.fr Contributions from Mathias Perrollaz, Christopher
Embedded Perception & Risk Assessment for next Cars Generation Christian LAUGIER, Research Director at Inria Chroma Team & IRT Nanolec Christian.laugier@inria.fr Contributions from Mathias Perrollaz, Christopher
Intelligent Technology for More Advanced Autonomous Driving
 FEATURED ARTICLES Autonomous Driving Technology for Connected Cars Intelligent Technology for More Advanced Autonomous Driving Autonomous driving is recognized as an important technology for dealing with
FEATURED ARTICLES Autonomous Driving Technology for Connected Cars Intelligent Technology for More Advanced Autonomous Driving Autonomous driving is recognized as an important technology for dealing with
Evaluation of Connected Vehicle Technology for Concept Proposal Using V2X Testbed
 AUTOMOTIVE Evaluation of Connected Vehicle Technology for Concept Proposal Using V2X Testbed Yoshiaki HAYASHI*, Izumi MEMEZAWA, Takuji KANTOU, Shingo OHASHI, and Koichi TAKAYAMA ----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
AUTOMOTIVE Evaluation of Connected Vehicle Technology for Concept Proposal Using V2X Testbed Yoshiaki HAYASHI*, Izumi MEMEZAWA, Takuji KANTOU, Shingo OHASHI, and Koichi TAKAYAMA ----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
Accurate Positioning for Vehicular Safety Applications the SAFESPOT Approach
 Accurate Positioning for Vehicular Safety Applications the SAFESPOT Approach Robin Schubert, Marius Schlingelhof, Heiko Cramer and Gerd Wanielik Professorship of Communications Engineering Chemnitz University
Accurate Positioning for Vehicular Safety Applications the SAFESPOT Approach Robin Schubert, Marius Schlingelhof, Heiko Cramer and Gerd Wanielik Professorship of Communications Engineering Chemnitz University
Platform Independent Launch Vehicle Avionics
 Platform Independent Launch Vehicle Avionics Small Satellite Conference Logan, Utah August 5 th, 2014 Company Introduction Founded in 2011 The Co-Founders blend Academia and Commercial Experience ~20 Employees
Platform Independent Launch Vehicle Avionics Small Satellite Conference Logan, Utah August 5 th, 2014 Company Introduction Founded in 2011 The Co-Founders blend Academia and Commercial Experience ~20 Employees
P1.4. Light has to go where it is needed: Future Light Based Driver Assistance Systems
 Light has to go where it is needed: Future Light Based Driver Assistance Systems Thomas Könning¹, Christian Amsel¹, Ingo Hoffmann² ¹ Hella KGaA Hueck & Co., Lippstadt, Germany ² Hella-Aglaia Mobile Vision
Light has to go where it is needed: Future Light Based Driver Assistance Systems Thomas Könning¹, Christian Amsel¹, Ingo Hoffmann² ¹ Hella KGaA Hueck & Co., Lippstadt, Germany ² Hella-Aglaia Mobile Vision
ADAS COMPUTER VISION AND AUGMENTED REALITY SOLUTION
 ENGINEERING ENERGY TELECOM TRAVEL AND AVIATION SOFTWARE FINANCIAL SERVICES ADAS COMPUTER VISION AND AUGMENTED REALITY SOLUTION Sergii Bykov, Technical Lead TECHNOLOGY AUTOMOTIVE Product Vision Road To
ENGINEERING ENERGY TELECOM TRAVEL AND AVIATION SOFTWARE FINANCIAL SERVICES ADAS COMPUTER VISION AND AUGMENTED REALITY SOLUTION Sergii Bykov, Technical Lead TECHNOLOGY AUTOMOTIVE Product Vision Road To
CONNECTED VEHICLE-TO-INFRASTRUCTURE INITATIVES
 CONNECTED VEHICLE-TO-INFRASTRUCTURE INITATIVES Arizona ITE March 3, 2016 Faisal Saleem ITS Branch Manager & MCDOT SMARTDrive Program Manager Maricopa County Department of Transportation ONE SYSTEM MULTIPLE
CONNECTED VEHICLE-TO-INFRASTRUCTURE INITATIVES Arizona ITE March 3, 2016 Faisal Saleem ITS Branch Manager & MCDOT SMARTDrive Program Manager Maricopa County Department of Transportation ONE SYSTEM MULTIPLE
Silicon radars and smart algorithms - disruptive innovation in perceptive IoT systems Andy Dewilde PUBLIC
 Silicon radars and smart algorithms - disruptive innovation in perceptive IoT systems Andy Dewilde PUBLIC Fietser in levensgevaar na ongeval met vrachtwagen op Louizaplein Het Laatste Nieuws 16/06/2017
Silicon radars and smart algorithms - disruptive innovation in perceptive IoT systems Andy Dewilde PUBLIC Fietser in levensgevaar na ongeval met vrachtwagen op Louizaplein Het Laatste Nieuws 16/06/2017
Robust Positioning for Urban Traffic
 Robust Positioning for Urban Traffic Motivations and Activity plan for the WG 4.1.4 Dr. Laura Ruotsalainen Research Manager, Department of Navigation and positioning Finnish Geospatial Research Institute
Robust Positioning for Urban Traffic Motivations and Activity plan for the WG 4.1.4 Dr. Laura Ruotsalainen Research Manager, Department of Navigation and positioning Finnish Geospatial Research Institute
The EDA SUM Project. Surveillance in an Urban environment using Mobile sensors. 2012, September 13 th - FMV SENSORS SYMPOSIUM 2012
 Surveillance in an Urban environment using Mobile sensors 2012, September 13 th - FMV SENSORS SYMPOSIUM 2012 TABLE OF CONTENTS European Defence Agency Supported Project 1. SUM Project Description. 2. Subsystems
Surveillance in an Urban environment using Mobile sensors 2012, September 13 th - FMV SENSORS SYMPOSIUM 2012 TABLE OF CONTENTS European Defence Agency Supported Project 1. SUM Project Description. 2. Subsystems
Revision of the EU General Safety Regulation and Pedestrian Safety Regulation
 AC.nl Revision of the EU General Safety Regulation and Pedestrian Safety Regulation 11 September 2018 ETSC isafer Fitting safety as standard Directorate-General for Internal Market, Automotive and Mobility
AC.nl Revision of the EU General Safety Regulation and Pedestrian Safety Regulation 11 September 2018 ETSC isafer Fitting safety as standard Directorate-General for Internal Market, Automotive and Mobility
White paper on CAR28T millimeter wave radar
 White paper on CAR28T millimeter wave radar Hunan Nanoradar Science and Technology Co., Ltd. Version history Date Version Version description 2017-07-13 1.0 the 1st version of white paper on CAR28T Contents
White paper on CAR28T millimeter wave radar Hunan Nanoradar Science and Technology Co., Ltd. Version history Date Version Version description 2017-07-13 1.0 the 1st version of white paper on CAR28T Contents
Advances in Vehicle Periphery Sensing Techniques Aimed at Realizing Autonomous Driving
 FEATURED ARTICLES Autonomous Driving Technology for Connected Cars Advances in Vehicle Periphery Sensing Techniques Aimed at Realizing Autonomous Driving Progress is being made on vehicle periphery sensing,
FEATURED ARTICLES Autonomous Driving Technology for Connected Cars Advances in Vehicle Periphery Sensing Techniques Aimed at Realizing Autonomous Driving Progress is being made on vehicle periphery sensing,
HIGHTS: towards sub-meter positioning accuracy in vehicular networks. Jérôme Härri (EURECOM) on Behalf of HIGHTS ETSI ITS Workshop March 6-8, 2018
 on Behalf of HIGHTS ETSI ITS Workshop March 6-8, 2018") HIGHTS: towards sub-meter positioning accuracy in vehicular networks Jérôme Härri (EURECOM) on Behalf of HIGHTS ETSI ITS Workshop March 6-8, 2018 The HIGHTS Consortium 09.03.2018 H2020 HIGHTS Project 2
HIGHTS: towards sub-meter positioning accuracy in vehicular networks Jérôme Härri (EURECOM) on Behalf of HIGHTS ETSI ITS Workshop March 6-8, 2018 The HIGHTS Consortium 09.03.2018 H2020 HIGHTS Project 2
PEGASUS Effectively ensuring automated driving. Prof. Dr.-Ing. Karsten Lemmer April 6, 2017
 PEGASUS Effectively ensuring automated driving. Prof. Dr.-Ing. Karsten Lemmer April 6, 2017 Starting Position for Automated Driving Top issue! Technology works Confidence Testing differently automated
PEGASUS Effectively ensuring automated driving. Prof. Dr.-Ing. Karsten Lemmer April 6, 2017 Starting Position for Automated Driving Top issue! Technology works Confidence Testing differently automated
Automatic Maneuver Recognition in the Automobile: the Fusion of Uncertain Sensor Values using Bayesian Models
 Automatic Maneuver Recognition in the Automobile: the Fusion of Uncertain Sensor Values using Bayesian Models Arati Gerdes Institute of Transportation Systems German Aerospace Center, Lilienthalplatz 7,
Automatic Maneuver Recognition in the Automobile: the Fusion of Uncertain Sensor Values using Bayesian Models Arati Gerdes Institute of Transportation Systems German Aerospace Center, Lilienthalplatz 7,
LOCALIZATION WITH GPS UNAVAILABLE
 LOCALIZATION WITH GPS UNAVAILABLE ARES SWIEE MEETING - ROME, SEPT. 26 2014 TOR VERGATA UNIVERSITY Summary Introduction Technology State of art Application Scenarios vs. Technology Advanced Research in
LOCALIZATION WITH GPS UNAVAILABLE ARES SWIEE MEETING - ROME, SEPT. 26 2014 TOR VERGATA UNIVERSITY Summary Introduction Technology State of art Application Scenarios vs. Technology Advanced Research in
Driver Assistance for "Keeping Hands on the Wheel and Eyes on the Road"
 ICVES 2009 Driver Assistance for "Keeping Hands on the Wheel and Eyes on the Road" Cuong Tran and Mohan Manubhai Trivedi Laboratory for Intelligent and Safe Automobiles (LISA) University of California
ICVES 2009 Driver Assistance for "Keeping Hands on the Wheel and Eyes on the Road" Cuong Tran and Mohan Manubhai Trivedi Laboratory for Intelligent and Safe Automobiles (LISA) University of California
Vehicle-to-X communication using millimeter waves
 Infrastructure Person Vehicle 5G Slides Robert W. Heath Jr. (2016) Vehicle-to-X communication using millimeter waves Professor Robert W. Heath Jr., PhD, PE mmwave Wireless Networking and Communications
Infrastructure Person Vehicle 5G Slides Robert W. Heath Jr. (2016) Vehicle-to-X communication using millimeter waves Professor Robert W. Heath Jr., PhD, PE mmwave Wireless Networking and Communications
SHAPING THE FUTURE OF IOT: PLATFORMS FOR CO-CREATION, RAPID PROTOTYPING AND SUCCESSFUL INDUSTRIALIZATION
 SHAPING THE FUTURE OF IOT: PLATFORMS FOR CO-CREATION, RAPID PROTOTYPING AND SUCCESSFUL INDUSTRIALIZATION Dr. Julian Bartholomeyczik Head of Software Development Bosch Connected Devices and Solutions GmbH
SHAPING THE FUTURE OF IOT: PLATFORMS FOR CO-CREATION, RAPID PROTOTYPING AND SUCCESSFUL INDUSTRIALIZATION Dr. Julian Bartholomeyczik Head of Software Development Bosch Connected Devices and Solutions GmbH
Devid Will, Adrian Zlocki
 Devid Will, Adrian Zlocki fka Forschungsgesellschaft Kraftfahrwesen mbh TS91 Sensors for Automated Vehicles State of the Art Analysis for Connected and Automated Driving within the SCOUT Project Overview
Devid Will, Adrian Zlocki fka Forschungsgesellschaft Kraftfahrwesen mbh TS91 Sensors for Automated Vehicles State of the Art Analysis for Connected and Automated Driving within the SCOUT Project Overview
CS686: High-level Motion/Path Planning Applications
 CS686: High-level Motion/Path Planning Applications Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa Class Objectives Discuss my general research view on motion planning Discuss
CS686: High-level Motion/Path Planning Applications Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa Class Objectives Discuss my general research view on motion planning Discuss
Model Deployment Overview. Debby Bezzina Senior Program Manager University of Michigan Transportation Research Institute
 Model Deployment Overview Debby Bezzina Senior Program Manager University of Michigan Transportation Research Institute Test Conductor Team 2 3 Connected Vehicle Technology 4 Safety Pilot Model Deployment
Model Deployment Overview Debby Bezzina Senior Program Manager University of Michigan Transportation Research Institute Test Conductor Team 2 3 Connected Vehicle Technology 4 Safety Pilot Model Deployment
Deployment and Testing of Optimized Autonomous and Connected Vehicle Trajectories at a Closed- Course Signalized Intersection
 Deployment and Testing of Optimized Autonomous and Connected Vehicle Trajectories at a Closed- Course Signalized Intersection Clark Letter*, Lily Elefteriadou, Mahmoud Pourmehrab, Aschkan Omidvar Civil
Deployment and Testing of Optimized Autonomous and Connected Vehicle Trajectories at a Closed- Course Signalized Intersection Clark Letter*, Lily Elefteriadou, Mahmoud Pourmehrab, Aschkan Omidvar Civil
Roadside Range Sensors for Intersection Decision Support
 Roadside Range Sensors for Intersection Decision Support Arvind Menon, Alec Gorjestani, Craig Shankwitz and Max Donath, Member, IEEE Abstract The Intelligent Transportation Institute at the University
Roadside Range Sensors for Intersection Decision Support Arvind Menon, Alec Gorjestani, Craig Shankwitz and Max Donath, Member, IEEE Abstract The Intelligent Transportation Institute at the University
Physics Based Sensor simulation
 Physics Based Sensor simulation Jordan Gorrochotegui - Product Manager Software and Services Mike Phillips Software Engineer Restricted Siemens AG 2017 Realize innovation. Siemens offers solutions across
Physics Based Sensor simulation Jordan Gorrochotegui - Product Manager Software and Services Mike Phillips Software Engineer Restricted Siemens AG 2017 Realize innovation. Siemens offers solutions across
ADAS Development using Advanced Real-Time All-in-the-Loop Simulators. Roberto De Vecchi VI-grade Enrico Busto - AddFor
 ADAS Development using Advanced Real-Time All-in-the-Loop Simulators Roberto De Vecchi VI-grade Enrico Busto - AddFor The Scenario The introduction of ADAS and AV has created completely new challenges
ADAS Development using Advanced Real-Time All-in-the-Loop Simulators Roberto De Vecchi VI-grade Enrico Busto - AddFor The Scenario The introduction of ADAS and AV has created completely new challenges
DENSO
 DENSO www.densocorp-na.com Collaborative Automated Driving Description of Project DENSO is one of the biggest tier one suppliers in the automotive industry, and one of its main goals is to provide solutions
DENSO www.densocorp-na.com Collaborative Automated Driving Description of Project DENSO is one of the biggest tier one suppliers in the automotive industry, and one of its main goals is to provide solutions
specifications as these arise from the requirements and the applications coming mainly from the automotive industry.
 issue 2 December 2010 Editorial Welcome to the MiniFaros EC funded project second newsletter. MiniFaros completed its first year and within this time the first outcomes have been made available. Within
issue 2 December 2010 Editorial Welcome to the MiniFaros EC funded project second newsletter. MiniFaros completed its first year and within this time the first outcomes have been made available. Within
e-navigation Underway International February 2016 Kilyong Kim(GMT Co., Ltd.) Co-author : Seojeong Lee(Korea Maritime and Ocean University)
 Co-author : Seojeong Lee(Korea Maritime and Ocean University)") e-navigation Underway International 2016 2-4 February 2016 Kilyong Kim(GMT Co., Ltd.) Co-author : Seojeong Lee(Korea Maritime and Ocean University) Eureka R&D project From Jan 2015 to Dec 2017 15 partners
e-navigation Underway International 2016 2-4 February 2016 Kilyong Kim(GMT Co., Ltd.) Co-author : Seojeong Lee(Korea Maritime and Ocean University) Eureka R&D project From Jan 2015 to Dec 2017 15 partners
Kooperative Sensorik für die Fussgängersicherheit Car2VRU-Kommunikation
 Kooperative Sensorik für die Fussgängersicherheit Car2VRU-Kommunikation i Wireless Communication and Information Berlin, 15.10.2010 15102010 Prof. Dr.-Ing. Dipl.-Ing. Dipl. Wirt.-Ing. Axel Sikora Department
Kooperative Sensorik für die Fussgängersicherheit Car2VRU-Kommunikation i Wireless Communication and Information Berlin, 15.10.2010 15102010 Prof. Dr.-Ing. Dipl.-Ing. Dipl. Wirt.-Ing. Axel Sikora Department
C-ITS Platform WG9: Implementation issues Topic: Road Safety Issues 1 st Meeting: 3rd December 2014, 09:00 13:00. Draft Agenda
 C-ITS Platform WG9: Implementation issues Topic: Road Safety Issues 1 st Meeting: 3rd December 2014, 09:00 13:00 Venue: Rue Philippe Le Bon 3, Room 2/17 (Metro Maalbek) Draft Agenda 1. Welcome & Presentations
C-ITS Platform WG9: Implementation issues Topic: Road Safety Issues 1 st Meeting: 3rd December 2014, 09:00 13:00 Venue: Rue Philippe Le Bon 3, Room 2/17 (Metro Maalbek) Draft Agenda 1. Welcome & Presentations
COGNITIVE MODEL OF MOBILE ROBOT WORKSPACE
 COGNITIVE MODEL OF MOBILE ROBOT WORKSPACE Prof.dr.sc. Mladen Crneković, University of Zagreb, FSB, I. Lučića 5, 10000 Zagreb Prof.dr.sc. Davor Zorc, University of Zagreb, FSB, I. Lučića 5, 10000 Zagreb
COGNITIVE MODEL OF MOBILE ROBOT WORKSPACE Prof.dr.sc. Mladen Crneković, University of Zagreb, FSB, I. Lučića 5, 10000 Zagreb Prof.dr.sc. Davor Zorc, University of Zagreb, FSB, I. Lučića 5, 10000 Zagreb
Semi-Autonomous Parking for Enhanced Safety and Efficiency
 Technical Report 105 Semi-Autonomous Parking for Enhanced Safety and Efficiency Sriram Vishwanath WNCG June 2017 Data-Supported Transportation Operations & Planning Center (D-STOP) A Tier 1 USDOT University
Technical Report 105 Semi-Autonomous Parking for Enhanced Safety and Efficiency Sriram Vishwanath WNCG June 2017 Data-Supported Transportation Operations & Planning Center (D-STOP) A Tier 1 USDOT University
Inter- and Intra-Vehicle Communications
 Inter- and Intra-Vehicle Communications Gilbert Held A Auerbach Publications Taylor 5* Francis Group Boca Raton New York Auerbach Publications is an imprint of the Taylor & Francis Croup, an informa business
Inter- and Intra-Vehicle Communications Gilbert Held A Auerbach Publications Taylor 5* Francis Group Boca Raton New York Auerbach Publications is an imprint of the Taylor & Francis Croup, an informa business
Road Boundary Estimation in Construction Sites Michael Darms, Matthias Komar, Dirk Waldbauer, Stefan Lüke
 Road Boundary Estimation in Construction Sites Michael Darms, Matthias Komar, Dirk Waldbauer, Stefan Lüke Lanes in Construction Sites Roadway is often bounded by elevated objects (e.g. guidance walls)
Road Boundary Estimation in Construction Sites Michael Darms, Matthias Komar, Dirk Waldbauer, Stefan Lüke Lanes in Construction Sites Roadway is often bounded by elevated objects (e.g. guidance walls)
Virtual Homologation of Software- Intensive Safety Systems: From ESC to Automated Driving
 Virtual Homologation of Software- Intensive Safety Systems: From ESC to Automated Driving Dr. Houssem Abdellatif Global Head Autonomous Driving & ADAS TÜV SÜD Auto Service Christian Gnandt Lead Engineer
Virtual Homologation of Software- Intensive Safety Systems: From ESC to Automated Driving Dr. Houssem Abdellatif Global Head Autonomous Driving & ADAS TÜV SÜD Auto Service Christian Gnandt Lead Engineer
The GATEway Project London s Autonomous Push
 The GATEway Project London s Autonomous Push 06/2016 Why TRL? Unrivalled industry position with a focus on mobility 80 years independent transport research Public and private sector with global reach 350+
The GATEway Project London s Autonomous Push 06/2016 Why TRL? Unrivalled industry position with a focus on mobility 80 years independent transport research Public and private sector with global reach 350+
FLASH LiDAR KEY BENEFITS
 In 2013, 1.2 million people died in vehicle accidents. That is one death every 25 seconds. Some of these lives could have been saved with vehicles that have a better understanding of the world around them
In 2013, 1.2 million people died in vehicle accidents. That is one death every 25 seconds. Some of these lives could have been saved with vehicles that have a better understanding of the world around them
Pedestrian Protection Using the Integration of V2V and the Pedestrian Automatic Emergency Braking System
 This is the author's manuscript of the article published in final edited form as: Tang, B., Chien, S., Huang, Z., & Chen, Y. (2016). Pedestrian protection using the integration of V2V and the Pedestrian
This is the author's manuscript of the article published in final edited form as: Tang, B., Chien, S., Huang, Z., & Chen, Y. (2016). Pedestrian protection using the integration of V2V and the Pedestrian
Israel Railways No Fault Liability Renewal The Implementation of New Technological Safety Devices at Level Crossings. Amos Gellert, Nataly Kats
 Mr. Amos Gellert Technological aspects of level crossing facilities Israel Railways No Fault Liability Renewal The Implementation of New Technological Safety Devices at Level Crossings Deputy General Manager
Mr. Amos Gellert Technological aspects of level crossing facilities Israel Railways No Fault Liability Renewal The Implementation of New Technological Safety Devices at Level Crossings Deputy General Manager
Following Dirt Roads at Night-Time
 Following Dirt Roads at Night-Time Sensors and Features for Lane Recognition and Tracking Sebastian F. X. Bayerl Thorsten Luettel Hans-Joachim Wuensche Autonomous Systems Technology (TAS) Department of
Following Dirt Roads at Night-Time Sensors and Features for Lane Recognition and Tracking Sebastian F. X. Bayerl Thorsten Luettel Hans-Joachim Wuensche Autonomous Systems Technology (TAS) Department of
Cooperative navigation (part II)
") Cooperative navigation (part II) An example using foot-mounted INS and UWB-transceivers Jouni Rantakokko Aim Increased accuracy during long-term operations in GNSS-challenged environments for - First responders
Cooperative navigation (part II) An example using foot-mounted INS and UWB-transceivers Jouni Rantakokko Aim Increased accuracy during long-term operations in GNSS-challenged environments for - First responders
Exploring Pedestrian Bluetooth and WiFi Detection at Public Transportation Terminals
 Exploring Pedestrian Bluetooth and WiFi Detection at Public Transportation Terminals Neveen Shlayan 1, Abdullah Kurkcu 2, and Kaan Ozbay 3 November 1, 2016 1 Assistant Professor, Department of Electrical
Exploring Pedestrian Bluetooth and WiFi Detection at Public Transportation Terminals Neveen Shlayan 1, Abdullah Kurkcu 2, and Kaan Ozbay 3 November 1, 2016 1 Assistant Professor, Department of Electrical
CVIS: First results from tests and validation
 CVIS: First results from tests and validation Peter Christ ETSI ITS Workshop 5 February 2009 Project objective Increase efficiency and safety through V2V and V2I cooperation enabled by: an open architecture
CVIS: First results from tests and validation Peter Christ ETSI ITS Workshop 5 February 2009 Project objective Increase efficiency and safety through V2V and V2I cooperation enabled by: an open architecture
Practical Experiences on a Road Guidance Protocol for Intersection Collision Warning Application
 Practical Experiences on a Road Guidance Protocol for Intersection Collision Warning Application Hyun Jeong Yun*, Jeong Dan Choi* *Cooperative Vehicle-Infra Research Section, ETRI, 138 Gajeong-ro Yuseong-gu,
Practical Experiences on a Road Guidance Protocol for Intersection Collision Warning Application Hyun Jeong Yun*, Jeong Dan Choi* *Cooperative Vehicle-Infra Research Section, ETRI, 138 Gajeong-ro Yuseong-gu,
FORESIGHT AUTONOMOUS HOLDINGS NASDAQ/TASE: FRSX. Investor Conference. December 2018
 FORESIGHT AUTONOMOUS HOLDINGS NASDAQ/TASE: FRSX Investor Conference December 2018 Forward-Looking Statement This presentation of Foresight Autonomous Holdings Ltd. (the Company ) contains forward-looking
FORESIGHT AUTONOMOUS HOLDINGS NASDAQ/TASE: FRSX Investor Conference December 2018 Forward-Looking Statement This presentation of Foresight Autonomous Holdings Ltd. (the Company ) contains forward-looking
IV Work Area: CONNECTED CARS: ROAD TO VEHICLE COMMUNICATION THROUGH VISIBLE LIGHT. An illustration of traffic control system of tomorrow
 IV Work Area: CONNECTED CARS: ROAD TO VEHICLE COMMUNICATION THROUGH VISIBLE LIGHT An illustration of traffic control system of tomorrow Motivation and Objectives IV, VV, VI optoelectronic WDM cooperative
IV Work Area: CONNECTED CARS: ROAD TO VEHICLE COMMUNICATION THROUGH VISIBLE LIGHT An illustration of traffic control system of tomorrow Motivation and Objectives IV, VV, VI optoelectronic WDM cooperative
Multi-Sensor Data Fusion for Checking Plausibility of V2V Communications by Vision-based Multiple-Object Tracking
 Multi-Sensor Data Fusion for Checking Plausibility of V2V Communications by Vision-based Multiple-Object Tracking Marcus Obst Laurens Hobert Pierre Reisdorf BASELABS GmbH HITACHI Europe Technische Universität
Multi-Sensor Data Fusion for Checking Plausibility of V2V Communications by Vision-based Multiple-Object Tracking Marcus Obst Laurens Hobert Pierre Reisdorf BASELABS GmbH HITACHI Europe Technische Universität
Sensor Fusion for Navigation in Degraded Environements
 Sensor Fusion for Navigation in Degraded Environements David M. Bevly Professor Director of the GPS and Vehicle Dynamics Lab dmbevly@eng.auburn.edu (334) 844-3446 GPS and Vehicle Dynamics Lab Auburn University
Sensor Fusion for Navigation in Degraded Environements David M. Bevly Professor Director of the GPS and Vehicle Dynamics Lab dmbevly@eng.auburn.edu (334) 844-3446 GPS and Vehicle Dynamics Lab Auburn University
Connected Car Networking
 Connected Car Networking Teng Yang, Francis Wolff and Christos Papachristou Electrical Engineering and Computer Science Case Western Reserve University Cleveland, Ohio Outline Motivation Connected Car
Connected Car Networking Teng Yang, Francis Wolff and Christos Papachristou Electrical Engineering and Computer Science Case Western Reserve University Cleveland, Ohio Outline Motivation Connected Car
RECOMMENDATION ITU-R M.1310* TRANSPORT INFORMATION AND CONTROL SYSTEMS (TICS) OBJECTIVES AND REQUIREMENTS (Question ITU-R 205/8)
 OBJECTIVES AND REQUIREMENTS (Question ITU-R 205/8)") Rec. ITU-R M.1310 1 RECOMMENDATION ITU-R M.1310* TRANSPORT INFORMATION AND CONTROL SYSTEMS (TICS) OBJECTIVES AND REQUIREMENTS (Question ITU-R 205/8) Rec. ITU-R M.1310 (1997) Summary This Recommendation
Rec. ITU-R M.1310 1 RECOMMENDATION ITU-R M.1310* TRANSPORT INFORMATION AND CONTROL SYSTEMS (TICS) OBJECTIVES AND REQUIREMENTS (Question ITU-R 205/8) Rec. ITU-R M.1310 (1997) Summary This Recommendation
AI Application Processing Requirements
 AI Application Processing Requirements 1 Low Medium High Sensor analysis Activity Recognition (motion sensors) Stress Analysis or Attention Analysis Audio & sound Speech Recognition Object detection Computer
AI Application Processing Requirements 1 Low Medium High Sensor analysis Activity Recognition (motion sensors) Stress Analysis or Attention Analysis Audio & sound Speech Recognition Object detection Computer
MotionDesk. 3-D online animation of simulated mechanical systems in real time. Highlights
 MotionDesk 3-D online animation of simulated mechanical systems in real time Highlights Tight integration to ModelDesk and ASM Enhanced support for all aspects of advanced driver assistance systems (ADAS)
MotionDesk 3-D online animation of simulated mechanical systems in real time Highlights Tight integration to ModelDesk and ASM Enhanced support for all aspects of advanced driver assistance systems (ADAS)
Automotive Needs and Expectations towards Next Generation Driving Simulation
 Automotive Needs and Expectations towards Next Generation Driving Simulation Dr. Hans-Peter Schöner - Insight fromoutside -Consulting - Senior Automotive Expert, Driving Simulation Association September
Automotive Needs and Expectations towards Next Generation Driving Simulation Dr. Hans-Peter Schöner - Insight fromoutside -Consulting - Senior Automotive Expert, Driving Simulation Association September
CAPACITIES FOR TECHNOLOGY TRANSFER
 CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
CAPACITIES FOR TECHNOLOGY TRANSFER The Institut de Robòtica i Informàtica Industrial (IRI) is a Joint University Research Institute of the Spanish Council for Scientific Research (CSIC) and the Technical
Horizon 2020 ICT Robotics Work Programme (draft - Publication: 20 October 2015)
") NCP TRAINING BRUSSELS 07 OCTOBER 2015 1 Horizon 2020 ICT Robotics Work Programme 2016 2017 (draft - Publication: 20 October 2015) Cécile Huet Deputy Head of Unit Robotics Directorate General for Communication
NCP TRAINING BRUSSELS 07 OCTOBER 2015 1 Horizon 2020 ICT Robotics Work Programme 2016 2017 (draft - Publication: 20 October 2015) Cécile Huet Deputy Head of Unit Robotics Directorate General for Communication
NAV CAR Lane-sensitive positioning and navigation for innovative ITS services AMAA, May 31 st, 2012 E. Schoitsch, E. Althammer, R.
 NAV CAR Lane-sensitive positioning and navigation for innovative ITS services AMAA, May 31 st, 2012 E. Schoitsch, E. Althammer, R. Kloibhofer (AIT), R. Spielhofer, M. Reinthaler, P. Nitsche (ÖFPZ), H.
NAV CAR Lane-sensitive positioning and navigation for innovative ITS services AMAA, May 31 st, 2012 E. Schoitsch, E. Althammer, R. Kloibhofer (AIT), R. Spielhofer, M. Reinthaler, P. Nitsche (ÖFPZ), H.
VSI Labs The Build Up of Automated Driving
 VSI Labs The Build Up of Automated Driving October - 2017 Agenda Opening Remarks Introduction and Background Customers Solutions VSI Labs Some Industry Content Opening Remarks Automated vehicle systems
VSI Labs The Build Up of Automated Driving October - 2017 Agenda Opening Remarks Introduction and Background Customers Solutions VSI Labs Some Industry Content Opening Remarks Automated vehicle systems
Current Technologies in Vehicular Communications
 Current Technologies in Vehicular Communications George Dimitrakopoulos George Bravos Current Technologies in Vehicular Communications George Dimitrakopoulos Department of Informatics and Telematics Harokopio
Current Technologies in Vehicular Communications George Dimitrakopoulos George Bravos Current Technologies in Vehicular Communications George Dimitrakopoulos Department of Informatics and Telematics Harokopio
Author s Name Name of the Paper Session. DYNAMIC POSITIONING CONFERENCE October 10-11, 2017 SENSORS SESSION. Sensing Autonomy.
 Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 10-11, 2017 SENSORS SESSION Sensing Autonomy By Arne Rinnan Kongsberg Seatex AS Abstract A certain level of autonomy is already
Author s Name Name of the Paper Session DYNAMIC POSITIONING CONFERENCE October 10-11, 2017 SENSORS SESSION Sensing Autonomy By Arne Rinnan Kongsberg Seatex AS Abstract A certain level of autonomy is already
Integrated Detection and Tracking in Multistatic Sonar
 Stefano Coraluppi Reconnaissance, Surveillance, and Networks Department NATO Undersea Research Centre Viale San Bartolomeo 400 19138 La Spezia ITALY coraluppi@nurc.nato.int ABSTRACT An ongoing research
Stefano Coraluppi Reconnaissance, Surveillance, and Networks Department NATO Undersea Research Centre Viale San Bartolomeo 400 19138 La Spezia ITALY coraluppi@nurc.nato.int ABSTRACT An ongoing research
I&S REASONING AND OBJECT-ORIENTED DATA PROCESSING FOR MULTISENSOR DATA FUSION
 I&S REASONING AND OBJECT-ORIENTED DATA PROCESSING FOR MULTISENSOR DATA FUSION A dvanced information technologies provide indispensable contribution to peacekeeping and other crisis response operations.
I&S REASONING AND OBJECT-ORIENTED DATA PROCESSING FOR MULTISENSOR DATA FUSION A dvanced information technologies provide indispensable contribution to peacekeeping and other crisis response operations.
Situation Awareness in Network Based Command & Control Systems
 Situation Awareness in Network Based Command & Control Systems Dr. Håkan Warston eucognition Meeting Munich, January 12, 2007 1 Products and areas of technology Radar systems technology Microwave and antenna
Situation Awareness in Network Based Command & Control Systems Dr. Håkan Warston eucognition Meeting Munich, January 12, 2007 1 Products and areas of technology Radar systems technology Microwave and antenna
Development of 24 GHz-band High Resolution Multi-Mode Radar
 Special Issue Automobile Electronics Development of 24 GHz-band High Resolution Multi-Mode Radar Daisuke Inoue*, Kei Takahashi*, Hiroyasu Yano*, Noritaka Murofushi*, Sadao Matsushima*, Takashi Iijima*
Special Issue Automobile Electronics Development of 24 GHz-band High Resolution Multi-Mode Radar Daisuke Inoue*, Kei Takahashi*, Hiroyasu Yano*, Noritaka Murofushi*, Sadao Matsushima*, Takashi Iijima*
EVALUATION OF DIFFERENT MODALITIES FOR THE INTELLIGENT COOPERATIVE INTERSECTION SAFETY SYSTEM (IRIS) AND SPEED LIMIT SYSTEM
 AND SPEED LIMIT SYSTEM") Effects of ITS on drivers behaviour and interaction with the systems EVALUATION OF DIFFERENT MODALITIES FOR THE INTELLIGENT COOPERATIVE INTERSECTION SAFETY SYSTEM (IRIS) AND SPEED LIMIT SYSTEM Ellen S.
Effects of ITS on drivers behaviour and interaction with the systems EVALUATION OF DIFFERENT MODALITIES FOR THE INTELLIGENT COOPERATIVE INTERSECTION SAFETY SYSTEM (IRIS) AND SPEED LIMIT SYSTEM Ellen S.
Robots in Human Environments
 Robots in Human Environments The Intelligent Vehicle Context Christian LAUGIER Research Director at INRIA Deputy Director of the LIG Laboratory (Grenoble France) Invited talk AMS 09, Karlsruhe, December
Robots in Human Environments The Intelligent Vehicle Context Christian LAUGIER Research Director at INRIA Deputy Director of the LIG Laboratory (Grenoble France) Invited talk AMS 09, Karlsruhe, December
Project Overview Mapping Technology Assessment for Connected Vehicle Highway Network Applications
 Project Overview Mapping Technology Assessment for Connected Vehicle Highway Network Applications AASHTO GIS-T Symposium April 2012 Table Of Contents Connected Vehicle Program Goals Mapping Technology
Project Overview Mapping Technology Assessment for Connected Vehicle Highway Network Applications AASHTO GIS-T Symposium April 2012 Table Of Contents Connected Vehicle Program Goals Mapping Technology
Technical Datasheet. Blaxtair is an intelligent cameraa with the ability to generate alarms when a pedestrian is detected
 BlaXtair 1 Product Overview Technical Datasheet Figure 1 Blaxtair sensor head Blaxtair is an intelligent cameraa with the ability to generate alarms when a pedestrian is detected in a predefined area.
BlaXtair 1 Product Overview Technical Datasheet Figure 1 Blaxtair sensor head Blaxtair is an intelligent cameraa with the ability to generate alarms when a pedestrian is detected in a predefined area.
Radar / ADS-B data fusion architecture for experimentation purpose
 Radar / ADS-B data fusion architecture for experimentation purpose O. Baud THALES 19, rue de la Fontaine 93 BAGNEUX FRANCE olivier.baud@thalesatm.com N. Honore THALES 19, rue de la Fontaine 93 BAGNEUX
Radar / ADS-B data fusion architecture for experimentation purpose O. Baud THALES 19, rue de la Fontaine 93 BAGNEUX FRANCE olivier.baud@thalesatm.com N. Honore THALES 19, rue de la Fontaine 93 BAGNEUX
Automated Testing of Autonomous Driving Assistance Systems
 Automated Testing of Autonomous Driving Assistance Systems Lionel Briand Vector Testing Symposium, Stuttgart, 2018 SnT Centre Top level research in Information & Communication Technologies Created to fuel
Automated Testing of Autonomous Driving Assistance Systems Lionel Briand Vector Testing Symposium, Stuttgart, 2018 SnT Centre Top level research in Information & Communication Technologies Created to fuel
Results of public consultation ITS
 Results of public consultation ITS 1. Introduction A public consultation (survey) was carried out between 29 February and 31 March 2008 on the preparation of the Action Plan on Intelligent Transport Systems
Results of public consultation ITS 1. Introduction A public consultation (survey) was carried out between 29 February and 31 March 2008 on the preparation of the Action Plan on Intelligent Transport Systems
Bluetooth Low Energy Sensing Technology for Proximity Construction Applications
 Bluetooth Low Energy Sensing Technology for Proximity Construction Applications JeeWoong Park School of Civil and Environmental Engineering, Georgia Institute of Technology, 790 Atlantic Dr. N.W., Atlanta,
Bluetooth Low Energy Sensing Technology for Proximity Construction Applications JeeWoong Park School of Civil and Environmental Engineering, Georgia Institute of Technology, 790 Atlantic Dr. N.W., Atlanta,
Embedded Bayesian Perception & V2X Communications for Autonomous Driving
 Embedded Bayesian Perception & V2X Communications for Autonomous Driving Dr. HDR Christian LAUGIER First Class Research Director at Inria, Chroma team & IRT nanoelec Scientific Advisor for Probayes SA
Embedded Bayesian Perception & V2X Communications for Autonomous Driving Dr. HDR Christian LAUGIER First Class Research Director at Inria, Chroma team & IRT nanoelec Scientific Advisor for Probayes SA
Some Signal Processing Techniques for Wireless Cooperative Localization and Tracking
 Some Signal Processing Techniques for Wireless Cooperative Localization and Tracking Hadi Noureddine CominLabs UEB/Supélec Rennes SCEE Supélec seminar February 20, 2014 Acknowledgments This work was performed
Some Signal Processing Techniques for Wireless Cooperative Localization and Tracking Hadi Noureddine CominLabs UEB/Supélec Rennes SCEE Supélec seminar February 20, 2014 Acknowledgments This work was performed
ITS Radiocommunications in Japan Progress report and future directions
 ITS Radiocommunications in Japan Progress report and future directions 6 March 2018 Berlin, Germany Tomoaki Ishii Assistant Director, New-Generation Mobile Communications Office, Radio Dept., Telecommunications
ITS Radiocommunications in Japan Progress report and future directions 6 March 2018 Berlin, Germany Tomoaki Ishii Assistant Director, New-Generation Mobile Communications Office, Radio Dept., Telecommunications